Настоящее изобретение относится к области двухколесных одноколейных транспортных средств (ТС), например велосипедов или мотоциклов, которые необходимо удерживать в равновесии при движении и в статическом положении без применения механизмов гиростабилизации или изменения направления движения с помощью поворота руля.
Из предшествующего уровня техники известен способ поддержания равновесия двухколесного одноколейного ТС с помощью механизма, работающего на гироскопическом эффекте, в состав которого входят два маховика, установленных на раме для вращения в противоположных направлениях. При вертикальном положении ТС маховики имеют параллельные оси вращения. При наклоне ТС в сторону от вертикального положения ось вращения одного маховика сохраняет вертикальное положение, а ось вращения другого маховика отклоняется на угол отклонения ТС от вертикального положения. (RU 2456195 от 06.10.2010. B62D 37/06).
Также известен способ стабилизации монорельсовой ракетной тележки, где стабилизирующее устройство содержит крыло в виде заостренной пластины, вал, устройство определения крена с гироскопом и двумя контактными датчиками, устройство вращения крыла в виде шагового двигателя или в виде двух пиротолкателей с цилиндрами, штоками и пороховыми зарядами, устройство управления устройством вращения крыла с источником питания, башмак, колодку, систему поджига порохового заряда пиротолкателей в виде запального порохового заряда, пару ракетных двигателей. (RU 2532212, от 27.10.2014, F41F 3/04, B61B 13/04).
Известна полезная модель самостабилизирующего устройства для велосипедов, характеризующаяся тем, что вертикальный корпус цилиндрической формы расположен подвешенным над местом расположения вилки; подъемно-вращающийся центр корпуса, который может подниматься, опускаться и вращаться на 90°, расположен в вертикальном корпусе цилиндрической формы; пара резиновых зубчатых колес расположена на расстоянии от нижнего края подъемно-вращающегося корпуса отличающаяся тем, что содержит маховик с зубчатым сектором дисковой мельницы, расположенный с внутренней стороны левого кривошипа, цепь соединена с зубчатым сектором дисковой мельницы и пустотелым толкателем; расположенным на подъемно-вращающемся корпусе; коробка передач перенимает обратное вращение кривошипа; блокировка скольжения в виде стопорного штыря расположена после стабилизирующей стойки автоматической блокировки открывания и стойки ножной блокировки открывания, расположенных над левой вилкой. (CN 2151924 от 1994-01-05, В62Н 1/12).
Известно устройство для обеспечения относительной стабилизации велосипеда которое имеет опоры, расположенные вблизи нижнего кронштейна, и пару поворотных кронштейнов (левый и правый) с возможностью поворота, шарнирно закрепленных на опоре. Поворотный кронштейн с возможностью шарнирного поворота поддерживает на другом конце вспомогательное колесо, нижний конец стержня тяги с возможностью поворота расположен на поворотном кронштейне, и верхний конец стержня тяги имеет такую конструкцию, что непрерывно контактирует с основанием багажа выше заднего колеса. Передняя часть багажного отделения выполнена с возможностью поворота вокруг опоры и расположена на верхней части сиденья в вертикальном направлении и в левом / правом направлении. (JP 2010018261, 2010-01-28, В62Н 1/12).
Известно двухколесное транспортное средство, включающее раму, противоположные переднюю и заднюю части и переднее колесо, установленное с возможностью вращения на раме, ближе к передней части рамы, расположенной противоположно заднему колесу, установленному с возможностью вращения на раме, ближе к задней части рамы и по одной линии по отношению к переднему колесу. Устройство устанавливается на раме транспортного средства между передними и задними колесами и имеет торцевые части, расположенные рядом с соответствующими сторонами рамы. Колесный стабилизатор в сборе установлен к обеим торцевым частям колеса соответственно и взаимодействует с землей, над которой транспортное средство движется вдоль сторон рамы вблизи передних и задних колес транспортного средства. (US 8128114 March 6, 2012).
Известно радиоуправляемое двухколесное транспортное средство, объединяющее композицию двух двигателей, редуктора и системы электроники для обеспечения балансировки и мобильности во время работы. Низкий центр тяжести обеспечивают относительно тяжелые колеса. Двухколесное транспортное средство обеспечивает повышенную балансировку на меньшей скорости между системой привода моторов. Элементы, имеющие подвижные суставы, прикрепляемые к велосипеду, обеспечивают наклон велосипеда и повороты во время эксплуатации велосипеда. (US 7896725, March 1, 2011).
Задача, на решение которой направлено заявленное изобретение, заключается в поддержании равновесия двухколесного одноколейного ТС без применения механизмов гиростабилизации или изменения направления движения с помощью поворота руля.
Поставленная задача решается за счет управления положением центра тяжести (ц.т.) ТС с помощью скользящей оси, для чего на задней оси расположено колесо, имеющее возможность вращения на оси и скольжения по оси, при этом контроль потери равновесия осуществляется электронным следящим устройством, а восстановление равновесия происходит путем перемещения ц.т. за счет скольжения задней оси с вилкой относительно колеса с помощью винтового, клемарьерного или иного механизма привода, энергопитание которого осуществляется от бортового или внешнего источника, при этом для устранения дополнительного опрокидывающего момента ц.т. транспортного средства располагается в плоскости (или как можно ближе к плоскости) действия силы, управляющей скольжением оси в колесе.
Кроме того, для увеличения эффективности поддержания равновесия путем увеличения амплитуды перемещения ц.т. используется увеличение амплитуды скольжения оси в заднем колесе, для чего плечо действия управляющей скольжением силы должно быть максимально возможным, либо одновременно применяются скользящие оси в заднем и переднем колесах.
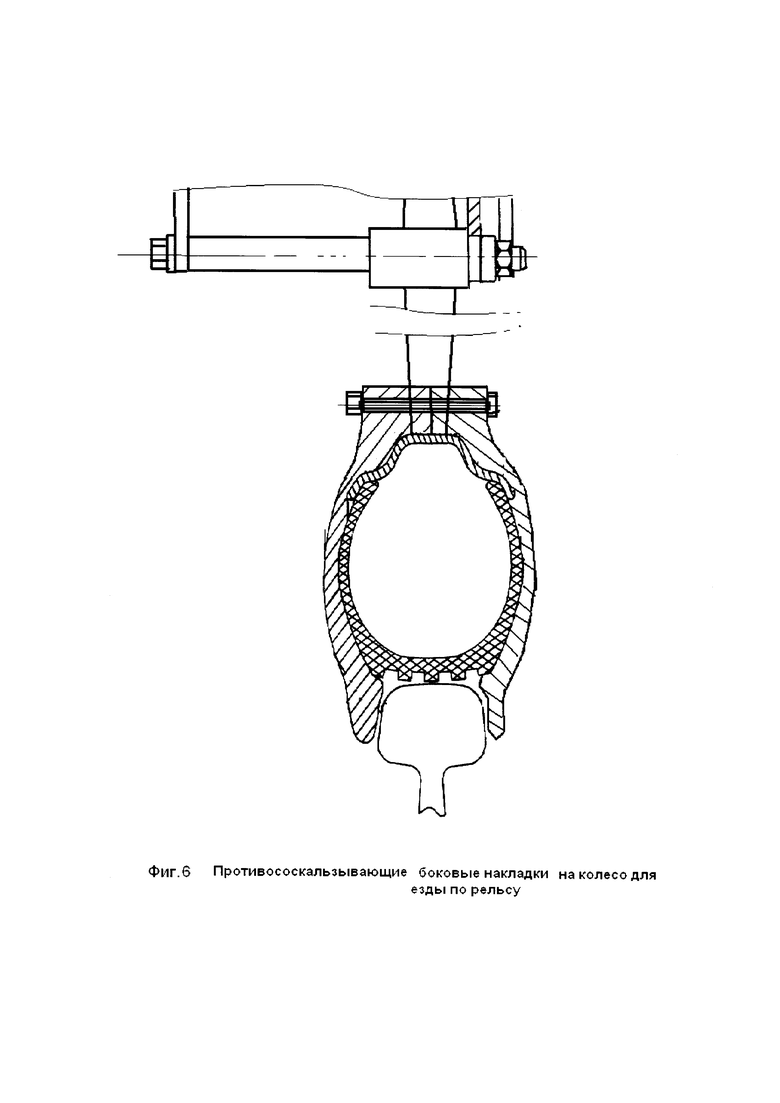
Для движения по прямолинейной узкой опорной поверхности, например по рельсу, и предотвращения соскальзывания колеса, в том числе ось которого является скользящей, на обод колеса устанавливаются противососкальзывающие боковые накладки.
Достигаемый технический результат заключается в поддержании равновесия двухколесного одноколейного транспортного средства путем управления положением ц.т. с помощью скользящей оси, без использования механизма гиростабилизации или изменения направления движения с помощью поворота руля.
Изобретение поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения.
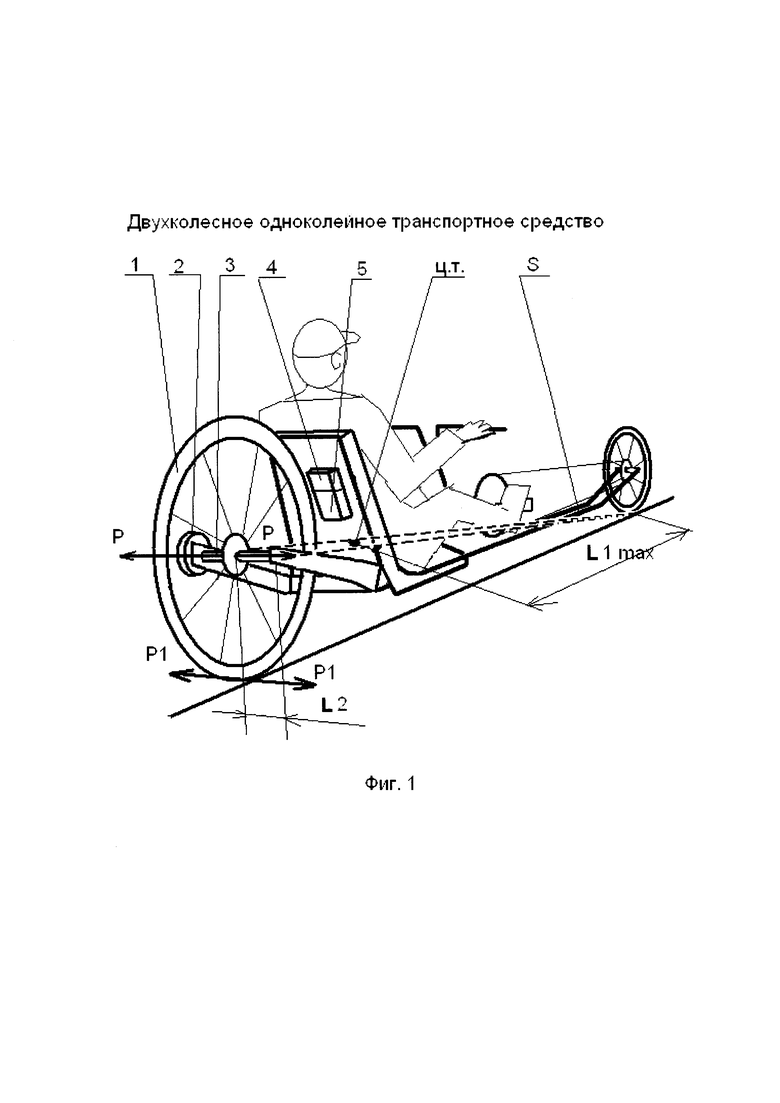
На фиг. 1 - изометрический вид двухколесного одноколейного ТС.
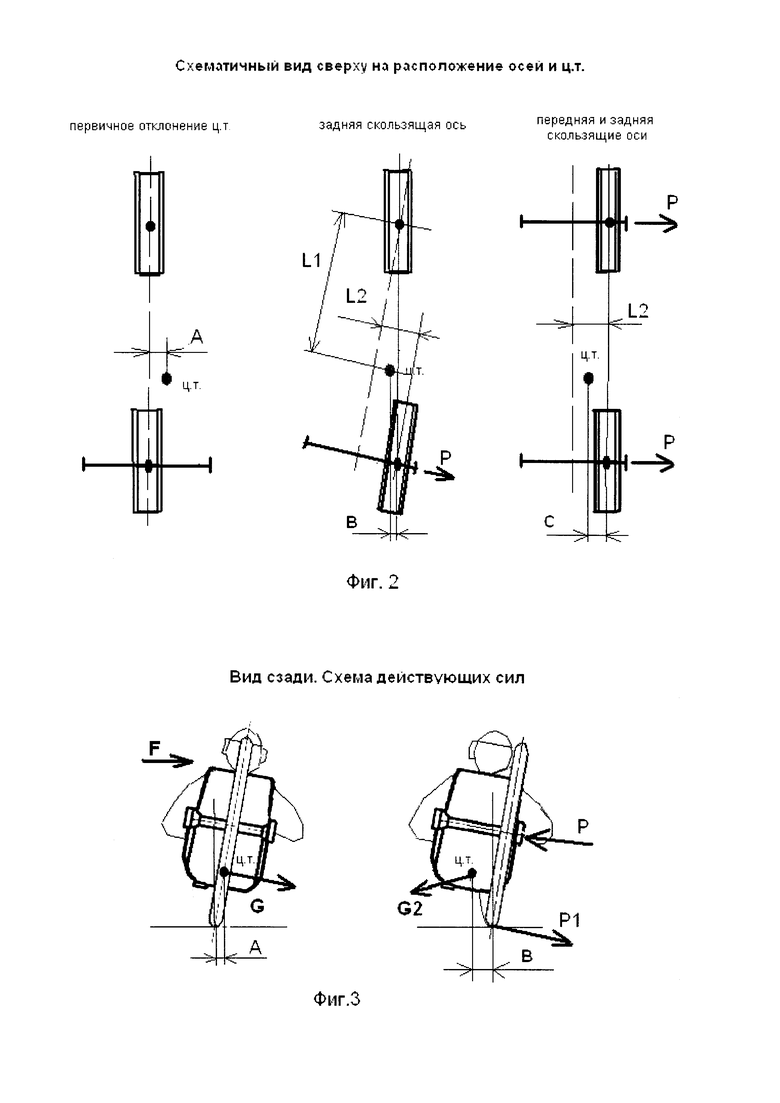
На фиг. 2 - вид сзади, схема действующих сил.
На фиг. 3 - схематичный вид сверху на расположение осей и ц.т.
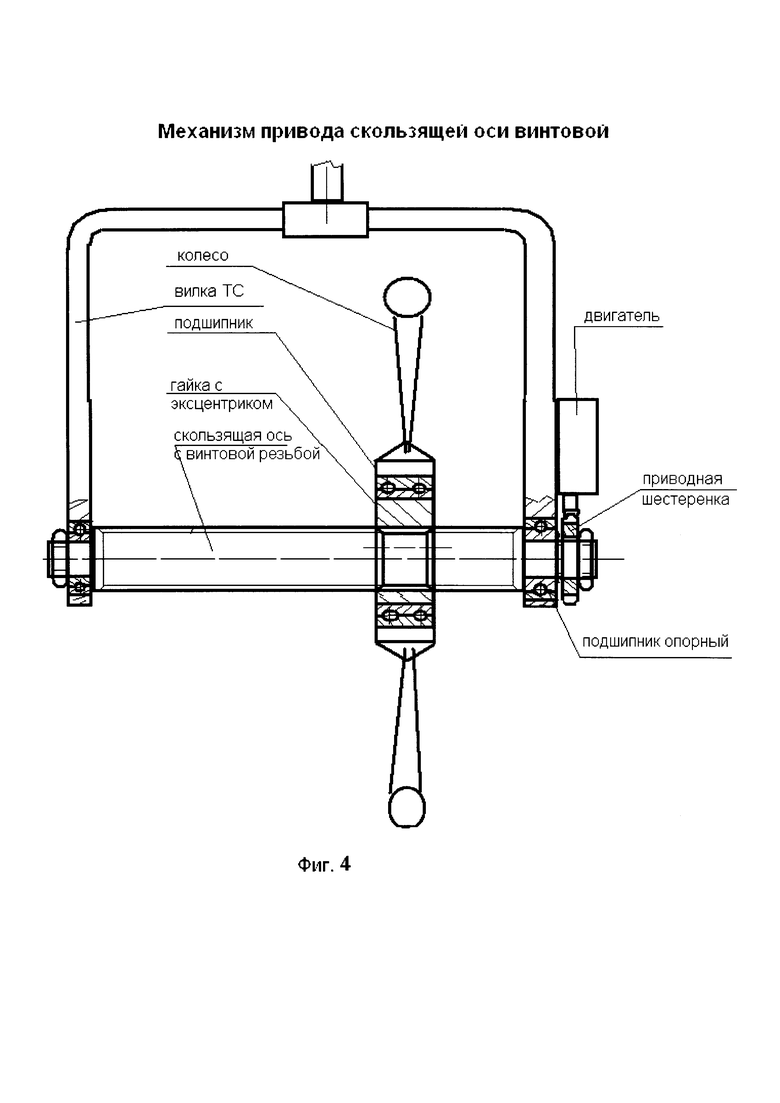
На фиг. 4 - механизм привода скользящей оси винтовой.
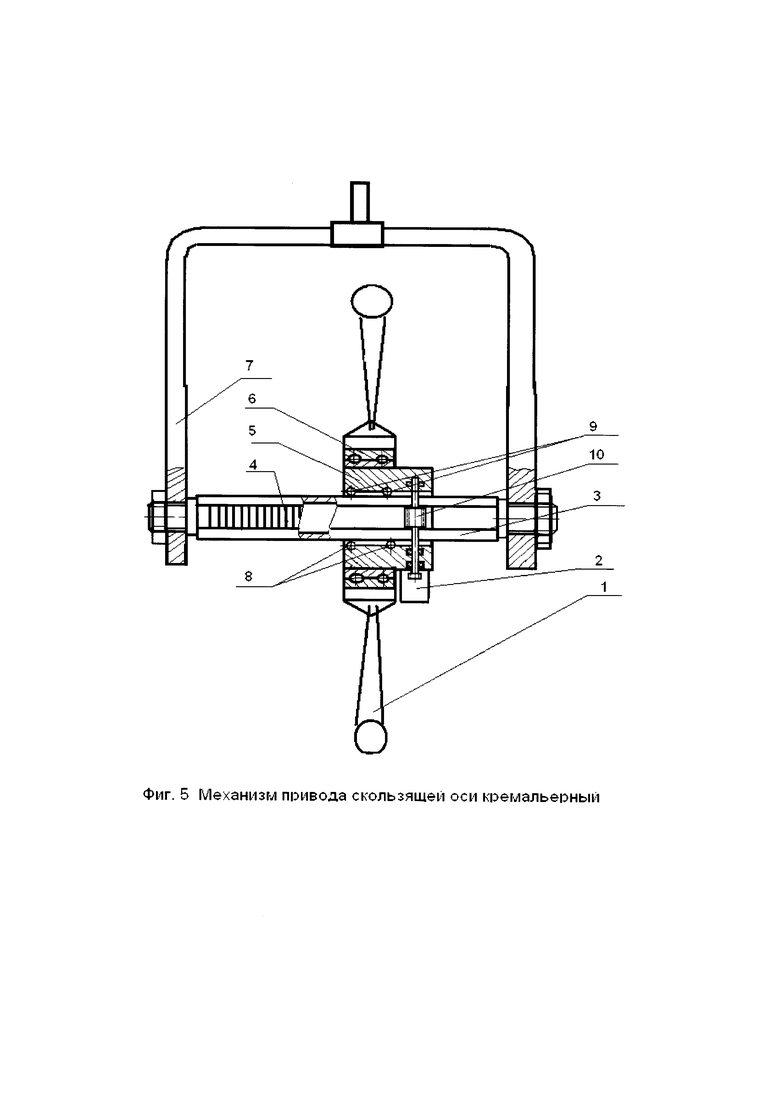
На фиг. 5 - механизм привода скользящей оси кремальерный.
На фиг. 6 - противососкальзывающие боковые накладки на колесо для езды по рельсу.
Способ заключается в том, что для управления положением центра тяжести ТС на задней оси 3 (фиг. 1) расположено колесо 1, имеющее возможность вращения на оси и скольжения по оси 3, при этом контроль потери равновесия осуществляется электронным следящим устройством 4, а восстановление равновесия достигается путем скольжения задней оси 3 с вилкой 7 относительно колеса 1 с помощью винтового, кремальерного или иного механизма привода с двигателем 2, энергопитание которого осуществляется, например, от бортового источника 5.
Для устранения дополнительного опрокидывающего момента ц.т. ТС располагается в плоскости S (фиг. 1) (или как можно ближе к плоскости S) действия силы Р, управляющей скольжением оси в колесе.
С помощью управляющей скольжением оси силы Р (фиг. 2), ось ТС с вилкой, перемещается относительно колеса до возникновения достаточного контропрокидывающего момента силы G2, что компенсирует опрокидывающий момент силы G, возникающий от действия внешней силы F, а, превосходя его, возвращает положение центра тяжести ТС в равновесное состояние.
Кроме того, с целью увеличения эффективности поддержания равновесия ТС путем увеличения амплитуды В перемещения ц.т. (фиг. 3) используется:
а) увеличение амплитуды L2 перемещения оси в заднем колесе, для чего плечо L1 действия управляющей скольжением силы Р должно быть максимально возможным, то есть ц.т. должен располагаться как можно ближе к скользящей задней оси и как можно дальше от передней оси ТС.
б) одновременное применение скользящих осей в заднем и переднем колесах, что, при той же амплитуде оси L2, дает перемещаться ц.т. с увеличенной амплитудой С, при этом требований по размеру L1 нет.
Конструкция винтового механизма привода скользящей оси (фиг. 4) состоит из вилки 7, установленной на подшипниках 4 оси 3 с нарезанной по всей длине винтовой резьбой, по которой движется резьбовая гайка 5 с установленными на ней подшипником 6 и колесом 1. Для линейного перемещения гайки 5 ось 3 вращается в подшипниках опор оси, получая крутящий момент от двигателя 2 через приводную шестерню 8. Для предотвращения проворота на оси 3 гайка 5 выполнена с эксцентриситетом внешнего диаметра и внутреннего отверстия.
Конструкция кремальерного механизма привода скользящей оси (фиг. 5) состоит из вилки 7, неподвижно установленной в ней оси 3 прямоугольного профиля, на одной грани которой расположена зубчатая рейка 4. Гайка 5 с установленным на подшипнике 6 колесом 1 перемещается по оси 3 на опорных 8 и прижимных роликах 9. От двигателя 2 крутящий момент передается на приводную шестерню 10, которая, находясь в зацеплении с кремальерой, перемещает гайку 5 с колесом 1 вдоль оси 3.
Для предотвращения соскальзывания колеса ТС под действием силы Р1, ось которого является скользящей, с прямолинейной узкой опорной поверхности, например рельса, на обод колеса ТС установлены противососкальзывающие боковые накладки (фиг. 6).
Способ работает следующим образом: Под воздействием внешней силы транспортное средство выходит из вертикального равновесного состояния, ц.т. перемещается и возникает опрокидывающий момент. С помощью приводного механизма ось ТС с вилкой скользит относительно колеса до возникновения достаточного контропрокидывающего момента, что компенсирует опрокидывающий момент, а превосходя его, возвращает положение центра тяжести ТС в равновесное состояние, при этом сила поперечной реакции колеса компенсируется силой трения колеса и опорной поверхности или реакцией противососкальзывающих боковых накладок на ободе колеса (если опорная поверхность - рельс).
Контроль за положением ТС и возникающими отклонениями ц.т. осуществляется электронным следящим устройством, а управление приводом перемещения оси в колесе осуществляет компьютерная система. Сам механизм привода оси может быть винтовым, кремальерным или иным, энергопитание которого осуществляется от бортового или внешнего источника.
Использование скользящих осей на переднем колесе одновременно с задним колесом увеличивает эффективность управления равновесием ТС, так как при начальном отклонении ц.т. перемещение скользящих осей на обоих колесах дает большее перемещение ц.т., чем при использовании только задней скользящей оси.
Таким образом, заявленный способ позволяет транспортному средству поддерживать равновесие даже в статическом положении, а также при движении по узкой прямолинейной опорной поверхности, например по рельсу, без применения механизмов гиростабилизации или изменения направления движения с помощью поворота руля.
Изобретение относится к способу поддержания равновесия двухколесного одноколейного транспортного средства. Способ поддержания равновесия двухколесного одноколейного транспортного средства путем управления положением центра тяжести с помощью скользящей оси характеризуется тем, что на задней оси расположено колесо, имеющее возможность вращения на оси и скольжения по оси. Контроль потери равновесия осуществляется электронным следящим устройством. Восстановление равновесия происходит за счет перемещения центра тяжести транспортного средства путем скольжения задней оси с вилкой относительно колеса с помощью винтового, кремальерного или иного механизма привода с энергопитанием от бортового или внешнего источника. Обеспечивается поддержание равновесия двухколесного одноколейного транспортного средства без применения механизмов гиростабилизации и без помощи изменения направления движения путем поворота руля. 4 з.п. ф-лы, 6 ил.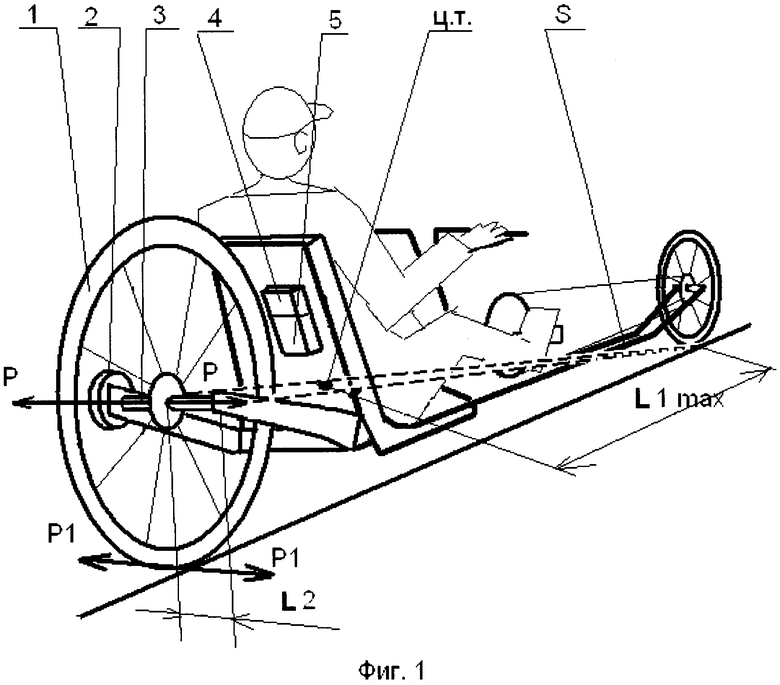
1. Способ поддержания равновесия двухколесного одноколейного транспортного средства путем управления положением центра тяжести с помощью скользящей оси, характеризующийся тем, что на задней оси расположено колесо, имеющее возможность вращения на оси и скольжения по оси, при этом контроль потери равновесия осуществляется электронным следящим устройством, а восстановление равновесия происходит за счет перемещения центра тяжести транспортного средства путем скольжения задней оси с вилкой относительно колеса с помощью винтового, кремальерного или иного механизма привода с энергопитанием от бортового или внешнего источника.
2. Способ по п.1, отличающийся тем, что для устранения дополнительного опрокидывающего момента центр тяжести транспортного средства располагается в плоскости или как можно ближе к плоскости действия силы, управляющей скольжением оси в колесе.
3. Способ по п.1, отличающийся тем, что для увеличения эффективности управления равновесием путем увеличения амплитуды перемещения центра тяжести плечо действия управляющей скольжением силы должно быть максимально возможным, для чего центр тяжести транспортного средства должен располагаться как можно ближе к скользящей задней оси и как можно дальше от передней оси транспортного средства.
4. Способ по п.1, отличающийся тем, что для увеличения эффективности управления равновесием путем увеличения амплитуды перемещения центра тяжести транспортного средства наряду со скользящей задней осью также используется скользящая ось в переднем колесе.
5. Способ по п.1, отличающийся тем, что для противодействия силе, управляющей скольжением оси, и предотвращения соскальзывания колеса с прямолинейной узкой опорной поверхности, например рельса, на обод колеса установлены противососкальзывающие боковые накладки.
| WO 2004047502 A2, 03.06.2004 | |||
| US 3124007 A, 10.03.1964 | |||
| US 2010127475 A1, 27.05.2010 | |||
| EP 1533217 A1, 25.05.2005 | |||
| ГИРОСТАБИЛИЗАТОР ДВУХКОЛЕСНОГО ОДНОКОЛЕЙНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2546036C1 |

