ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству обнаружения ускорения.
В стандартном устройстве обнаружения ускорения на основе сигнала датчика ускорения транспортного средства в остановленном или стационарном состоянии и другого сигнала датчика ускорения в переходном состоянии, при котором транспортное средство переходит из стационарного состояния в состояние движения, ошибку из-за уходов параметров (дрейфа), вызванную изменением температуры или старением, вычисляют для использования в коррекции нулевой точки датчика ускорения. Пример такого метода, относящегося к настоящему описанию, раскрыт в Патентном документе 1.
ДОКУМЕНТ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Патентный документ
Патентный документ 1: Японская выложенная публикация патентной заявки № 2008-145151.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема, решаемая изобретением
Однако в предшествующем уровне техники, описанном выше, сигнал ускорения, обнаруженный при переходе из стационарного состояния в состояние движения, включает в себя компонент вибрации кузова транспортного средства, который возникает из-за операции отключения тормоза, вследствие чего обнаружение ускорения будет скорректировано на эту величину, что приведет к ухудшению точности коррекции.
Задачей настоящего изобретения является обеспечение устройства обнаружения ускорения, которое может повысить точность коррекции ошибки дрейфа.
Путь решения проблемы
Согласно настоящему изобретению нулевое положение сигнала датчика ускорения корректируется значением коррекции, основываясь на сигнале ускорения, в котором устранен или вычтен компонент вибрации кузова транспортного средства.
Эффекты изобретения
Поэтому, в соответствии с настоящим изобретением, за счет коррекции положения нулевой точки сигнала датчика ускорения, с использованием сигнала ускорения, в котором компонент вибрации транспортного средства был устранен, ошибочная коррекция, связанная с ошибкой дрейфа, вызванной вибрацией транспортного средства при снятии с тормоза, будет подавлена, и может быть достигнуто повышение точности коррекции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
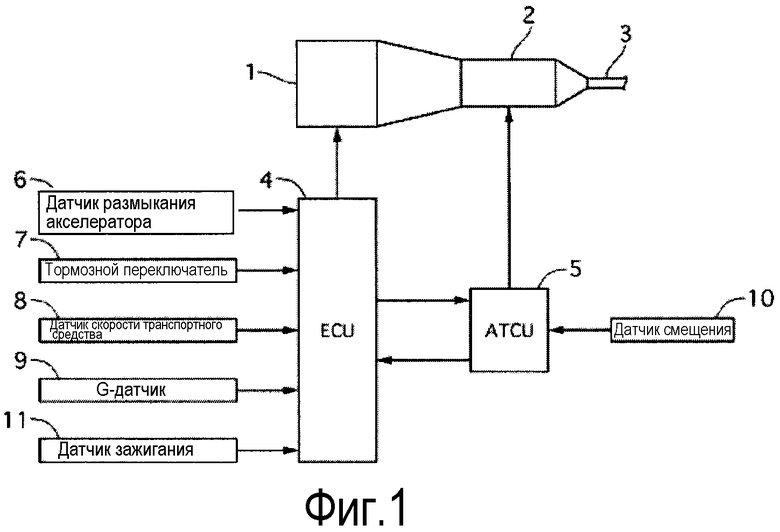
ФИГ. 1 - схематичное представление устройства управления в нейтральном состоянии, снабженного устройством обнаружения ускорения, в соответствии с первым вариантом осуществления.
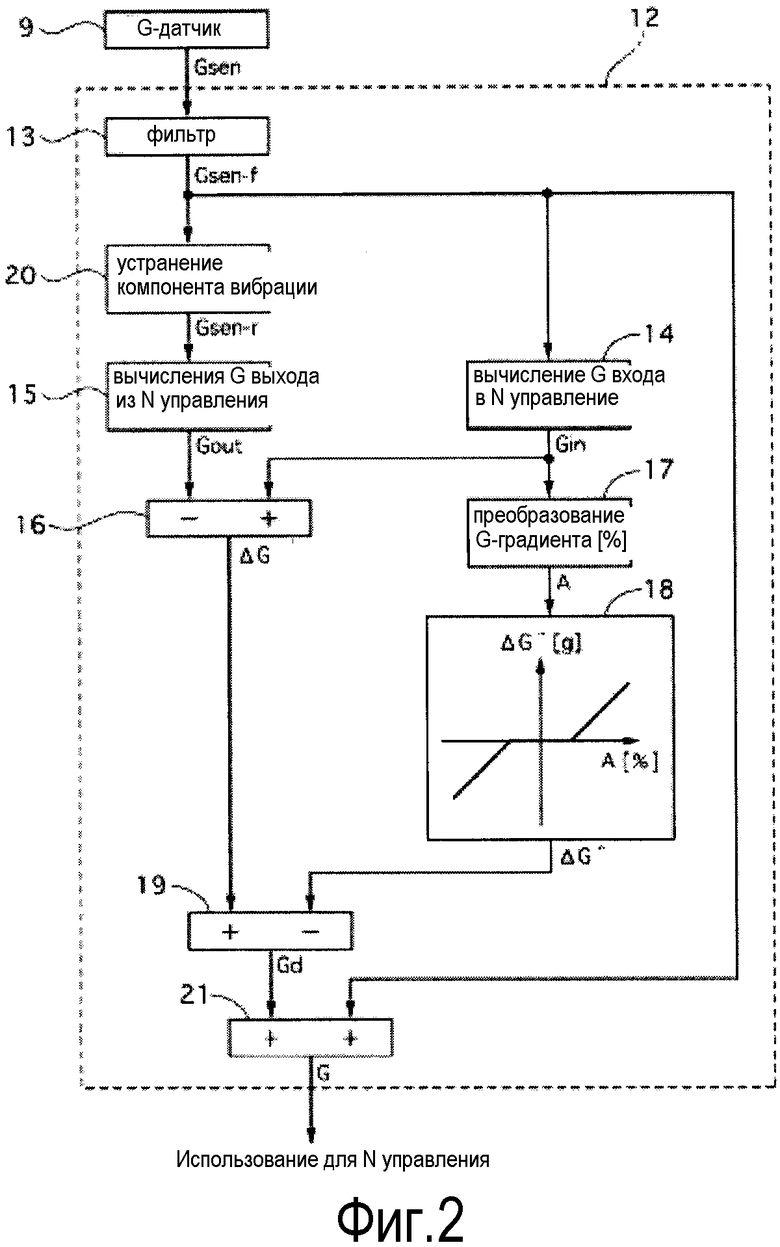
ФИГ. 2 - блок-схема управления, отображающая конфигурацию устройства 12 обнаружения ускорения, находящегося в ECU 4, согласно первому варианту осуществления.
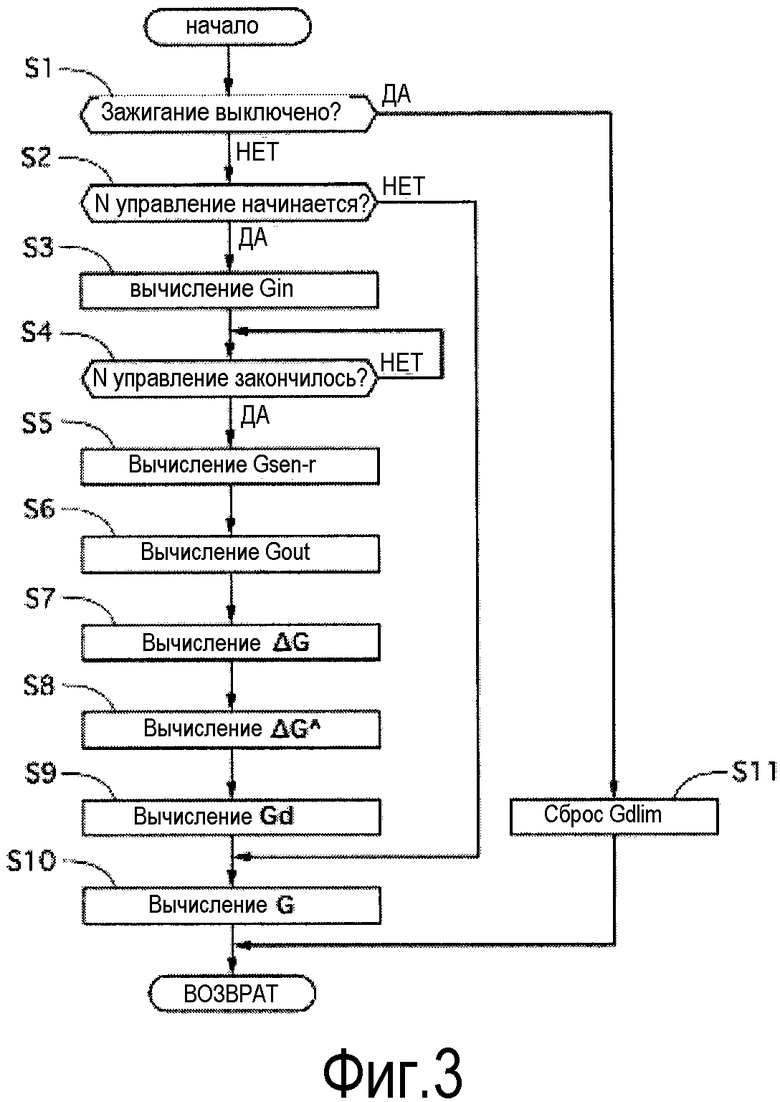
ФИГ. 3 - блок-схема последовательности операций процесса обнаружения ускорения, выполняемого устройством 12 обнаружения ускорения согласно первому варианту осуществления.
ФИГ. 4 - временная диаграмма, отображающая логику возникновения ошибочной коррекции в момент коррекции нулевой точки в стандартной технологии.
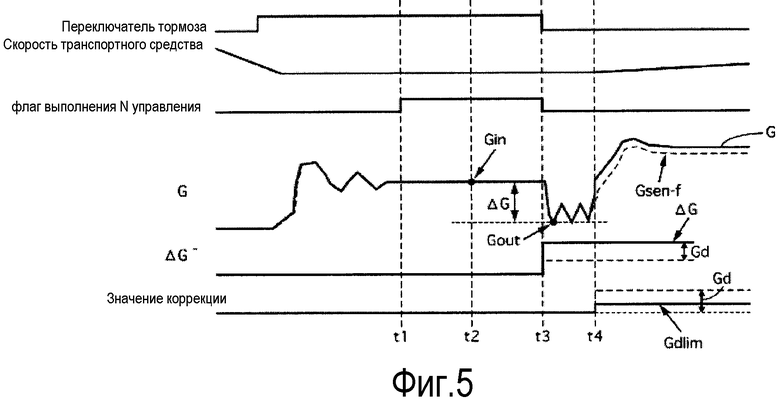
ФИГ. 5 - временная диаграмма, отображающая операцию запрета ошибочной коррекции в первом варианте осуществления.
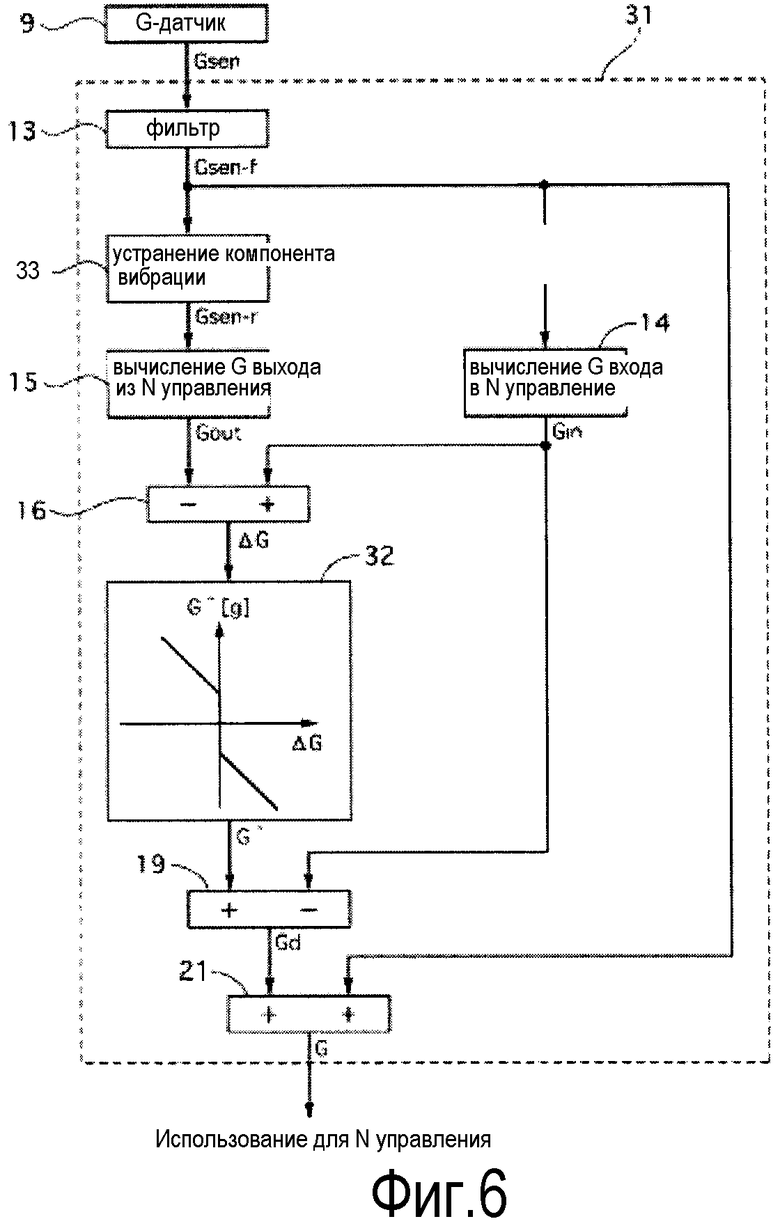
ФИГ. 6 - блок-схема управления, отображающая конфигурацию устройства 31 обнаружения ускорения, находящегося в ECU 4, согласно второму варианту осуществления.
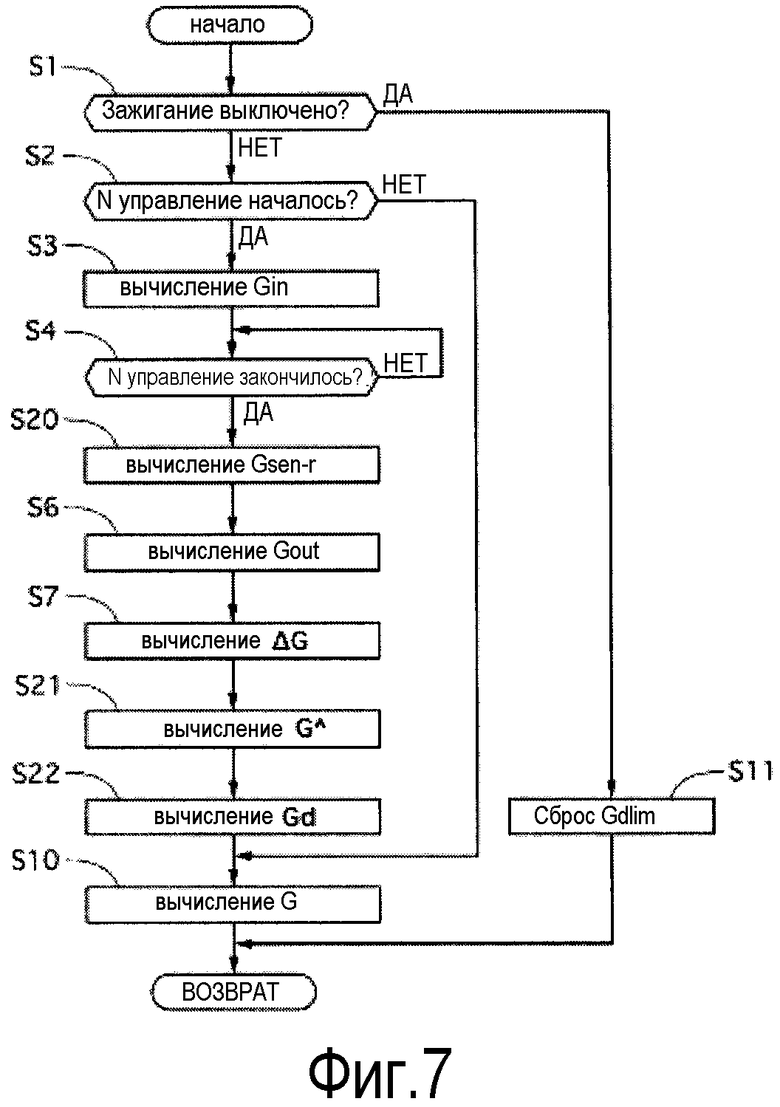
ФИГ. 7 - блок-схема последовательности операций процесса обнаружения ускорения, исполняемого устройством 31 обнаружения ускорения согласно второму варианту осуществления.
ФИГ. 8 - временная диаграмма, отображающая операцию запрета ошибочной коррекции во втором варианте осуществления.
ОПИСАНИЕ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
9 - датчик ускорения
12, 31 - устройство обнаружения ускорения
20, 32 - блок ограничения или установления предела величины поправки (средство ограничения величины поправки)
21 - блок коррекции нулевой точки (средство коррекции нулевой точки).
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее приведено описание конфигурации для осуществления устройства обнаружения ускорения согласно настоящему изобретению на основе вариантов осуществления.
Первый вариант осуществления
Устройство управления в нейтральном состоянии
На ФИГ. 1 проиллюстрирована диаграмма системы, в которой применено устройство обнаружения ускорения согласно первому варианту осуществления. Выходная мощность двигателя 1, после заданного изменения посредством автоматической передачи 2, соединенной с двигателем 1, поступает от выходного вала 3 на ведущие колеса, которые не показаны. Транспортное средство снабжено контроллером двигателя (ECU) 4 и контроллером автоматической передачи (ATCU) 5 для управления, соответственно, двигателем 1 и автоматической передачей 2 на основе выходных сигналов различных датчиков и т.п. устройств, описанных ниже. Оба контроллера 4, 5 могут осуществлять связь друг с другом.
На транспортном средстве установлены различные датчики, такие как датчик 6 размыкания акселератора, тормозной переключатель 7, датчик 8 скорости транспортного средства, датчик 9 ускорения (G-датчик), датчик 10 переключения и датчик 11 зажигания.
Датчик 6 размыкания акселератора обнаруживает размыкание акселератора и выводит сигнал размыкания акселератора на ECU 4. Тормозной переключатель 7 выводит на ECU 4 сигнал тормозного переключателя, указывающий на состояние «ВКЛЮЧЕНО», когда тормозная педаль нажата, и «ОТКЛЮЧЕНО», когда тормозная педаль не нажата. Датчик 8 скорости транспортного средства определяет скорость движения (скорость транспортного средства) на основе угла вращения каждого колеса, определенного датчиком скорости колеса, закрепленным на каждом колесе, и выводит сигнал скорости транспортного средства на ECU 4. G-датчик 9 определяет продольное ускорение, действующее на транспортное средство, и выводит сигнал G-датчика на ECU 4. Датчик 10 смещения обнаруживает положение смещения автоматической передачи 2 и выводит сигнал положения смещения на ATCU 5. Датчик 11 зажигания выводит на ECU 4 сигнал зажигания, который указывает на состояние «ВКЛЮЧЕНО» при включенном ключе зажигания и на состояние «ОТКЛЮЧЕНО» при выключенном зажигании.
ECU 4 выводит на ATCU 5 запрос для выключения сцепления (пусковой муфты) автоматической передачи 2, которая в момент старта транспортного средства находится в зацеплении, выполняя при этом управление в нейтральном состоянии, при котором передача движущей силы на ведущие колеса разомкнута, причем, когда положение смещения автоматической передачи 2 находится в состоянии переднего хода или в положении привода, транспортное средство поддерживается в остановленном состоянии или стационарном состоянии за счет тормоза, без нажатия на педаль 2 акселератора, а уклон дороги меньше, чем заданный угол (5% или менее для дороги как на подъем, так и на спуск).
Иными словами, ECU 4 будет выполнять управление в нейтральном состоянии при условии, что сигнал положения смещения, поступающий из датчика 10 смещения, указывает на положение привода переднего хода, что сигнал размыкания акселератора датчика 6 размыкания акселератора равен нулю, что сигнал тормозного переключателя, поступающий из тормозного переключателя 7, указывает на положение «ВКЛЮЧЕНО», что сигнал скорости транспортного средства, поступающий из датчика 8 скорости транспортного средства, составляет заданное значение (≈0), и что сигнал ускорения, поступающий из G-датчика 9, указывает на ускорение, соответствующее наклону дороги на заданный угол 5% или менее. В момент времени, когда какое-либо из вышеописанных условий для выполнения управления в нейтральном состоянии более не удовлетворяется, например, когда тормозной переключатель перешел в положение «ОТКЛЮЧЕНО», ECU 4 будет завершать управление в нейтральном состоянии и посылать запрос в ATCU 5 на приведение в зацепление пусковой муфты автоматической передачи 2.
Устройство обнаружения ускорения
На ФИГ. 2 показана блок-схема управления, отображающая конфигурацию устройства 12 обнаружения ускорения, находящегося в ECU 4, причем устройство 12 обнаружения ускорения согласно первому варианту осуществления снабжено фильтром 13, блоком 20 устранения компонента вибрации (средством устранения компонента вибрации), блоком 14 вычисления G входа в N управление, блок 15 вычисления G выхода из N управления, блок 16 вычисления ΔG, блок 17 преобразования G→ градиента или наклона, блок 18 оценки ΔG, блок 19 вычисления значения коррекции и блок 21 коррекции нулевой точки (средство коррекции нулевой точки).
Фильтр 13 удаляет компонент шума, содержащийся в сигнале Gsen [g] (в диапазоне примерно 20-30 Гц) G-датчика, и образован фильтром отсечки шума. Следует отметить, что понятие «устранение» также может включать в себя понятие «снижение» в вариантах осуществления.
Блок 20 устранения компонента вибрации выводит сигнал Gsen-r G-датчика, который устраняет компонент вибрации кузова транспортного средства при снятии с тормоза из сигнала Gsen-f G-датчика, который прошел фильтр 13 при переходе из стационарного или остановленного состояния транспортного средства в состояние движения. В первом варианте осуществления используется фильтр задержки первого порядка с частотой отсечки примерно при 3 Гц. Процесс фильтрации накладывается на сигнал Gsen-f G-датчика, проходящий через фильтр 13, вследствие чего компонент вибрации транспортного средства устраняется. Компонент вибрации транспортного средства подробно описан ниже.
Блок 14 вычисления G входа в N управление вычисляет ускорение Gin [g] при входе в N управление на основе сигнала Gsen-f G-датчика после прохождения через фильтр 13, по истечении заданного времени от начала управления в нейтральном состоянии. Следует отметить, что заданное время представляет собой время, в течение которого генерация вибрации транспортного средства при операции остановки достигла достаточной степени сходимости, и тем самым сигнал Gsen G-датчика оценивается как не содержащий компонента вибрации кузова транспортного средства, связанного с остановкой транспортного средства.
Блок 15 вычисления G выхода из N управления вычисляет на основе сигнала Gsen-f G-датчика, проходящего через фильтр 13 с момента времени в конце управления в нейтральном состоянии и до начала передачи движущей силы на ведущие колеса, в ответ на зацепление пусковой муфты в автоматической передаче 2, ускорение Gout [g] выхода из N управления, которое отображает наибольший промежуток от ускорения Gin входа в N управление.
Более конкретно, ускорение Gout выхода из N управления представляет максимальное абсолютное значение ускорения, возникающего из-за того, что транспортное средство откатывается непосредственно после завершения управления в нейтральном состоянии, которое было введено на участке наклонной дороги с заданным или большим градиентом наклона.
Блок 16 вычисления ΔG вычисляет обнаруженную величину изменения ускорения ΔG[g] путем вычитания ускорения Gout выхода из N управления, вычисленного блоком 15 вычисления G выхода из N управления, из ускорения Gin входа в N управление, вычисленного блоком 14 вычисления G входа в N управление.
Блок 17 преобразования G→градиента преобразует ускорение Gin входа в N управление, вычисленное блоком 14 вычисления G входа в N управление, в градиент A[%] поверхности дороги. В первом варианте осуществления градиент для идущей в гору или поднимающейся дороги обозначен как положительный (+), тогда как градиент для спускающейся с горы или наклоненной вниз дороги обозначен как отрицательный (-).
Блок 18 оценки ΔG вычисляет на основе градиента поверхности дороги A [%], полученного в блоке 17 преобразования G→градиента, и при обращении к таблице вычисления величины изменения ускорения-градиента, оценку изменения ускорения ΔG^[g]. Соотношение между градиентом поверхности дороги и величиной изменения ускорения транспортного средства, которое возникает из-за скатывания транспортного средства при завершении N управления, для одинаковых транспортных средств остается одинаковым. Поэтому таблица вычисления величины изменения ускорения-градиента может быть получена заранее экспериментальным путем и т.п.
Блок 19 вычисления значения коррекции вычисляет значение коррекции Gd [g] путем вычитания оценки величины изменения ускорения ΔG^, вычисленной в блоке 18 оценки ΔG, из обнаруженной величины изменения ускорения ΔG, вычисленной в блоке 16 вычисления ΔG.
Блок 21 коррекции нулевой точки вычисляет обнаруженное значение ускорения G, которое корректирует ошибку дрейфа сигнала Gsen G-датчика путем добавления значения коррекции Gd, вычисленного в блоке 20 вычисления значения коррекции, к сигналу Gsen-f G-датчика, прошедшему через фильтр 13 (коррекция нулевой точки).
Как обсуждалось выше, обнаруженное значение ускорения G, вычисленное указанным образом, используется для принятия решения, следует ли выполнять управление в нейтральном состоянии или нет.
Способ детектирования ускорения
На ФИГ. 3 показана блок-схема последовательности операций процесса, выполняемого устройством 12 обнаружения ускорения согласно первому варианту осуществления. Далее приводится описание каждого этапа. Это управление выполняется периодически, с заданным периодом вычисления, пока зажигание находится в состоянии «ВКЛЮЧЕНО».
На этапе S1 происходит определение того, был ли ключ зажигания выключен, и если «ДА», то процесс управления переходит к этапу S11, а если «НЕТ», то процесс управления переходит к этапу S2.
На этапе S2 происходит определение того, было ли начато управление в нейтральном состоянии, и если «ДА», то процесс управления переходит к этапу S3, а если «НЕТ» - к этапу S10.
На этапе S3 в блоке 14 вычисления G входа в N управление вычисляется Gin [g] входа в N управление.
На этапе S4 происходит определение того, было ли завершено управление в нейтральном состоянии. Если «ДА», то процесс управления переходит к этапу S5, а если «НЕТ», то этап S4 повторяется.
На этапе S5 блок 20 устранения компонента вибрации вычисляет сигнал Gsen-r G-датчика, который устраняет компонент вибрации кузова транспортного средства после прохождения сигнала G-датчика через фильтр 13.
На этапе S6 в блоке 15 вычисления G выхода из N управления вычисляется ускорение Gout[g] выхода из N управления (ускорение выхода из управления в нейтральном состоянии).
На этапе S7 блок 16 вычисления ΔG вычисляет обнаруженную величину изменения ускорения ΔG[g] путем вычитания ускорения Gout выхода из N управления, вычисленного на этапе S6, из ускорения Gin, полученного при входе в N управление, вычисленного на этапе S3.
На этапе S8 блок 18 оценки ΔG вычисляет оценку величины изменения ускорения ΔG^ [g], на основе градиента A[%] поверхности дороги, который преобразован блоком 17 преобразования G→градиента и при обращении к таблице вычисления величины изменения ускорения-градиента.
На этапе S9 блок 19 вычисления значения коррекции вычисляет значение коррекции Gd [g] путем вычитания оценки величины изменения ускорения ΔG^, которая вычислена на этапе S8, из обнаруженной величины изменения ускорения ΔG, которая вычислена на этапе S7. Поэтому значение коррекции Gd будет считаться положительным значением в случае ΔG>ΔG^, а в случае ΔG<ΔG^ получается отрицательное значение.
На этапе S9 в блоке 21 коррекции нулевой точки вычисляется обнаруженное значение ускорения G путем прибавления значения коррекции Gd к сигналу Gsen-f G-датчика после его прохождения через фильтр 13, тем самым корректируя ошибку дрейфа сигнала Gsen G-датчика. Следует отметить, что если процесс управления переходит к этому этапу от этапа S9, то обнаруженное значение ускорения G вычисляется с использованием значения коррекции Gd, вычисленного на этапе S9, и обновляется сохраненное значение коррекции Gd. С другой стороны, если процесс управления переходит к этому этапу от этапа S2, обнаруженное ускорение G вычисляется с использованием сохраненного значения коррекции Gd.
На этапе S11 в блоке 21 коррекции нулевой точки значение коррекции Gd сбрасывается (до нуля), и управление возобновляется.
Далее описана операция коррекции нулевой точки, связанная с величиной изменения ускорения при откате транспортного средства назад.
Когда водитель снимает ногу с тормозной педали в ходе выполнения управления в нейтральном состоянии на наклонной дороге, транспортное средство откатывается назад, до момента приведения в зацепление пусковой муфты автоматической передачи 2. В устройстве 12 обнаружения ускорения в первом варианте осуществления, с использованием этого изменения ускорения из-за отката назад, можно корректировать ошибку дрейфа сигнала Gsen G-датчика. Более конкретно, путем вычисления как обнаруженной величины изменения ускорения ΔG на основе изменения в сигнале Gsen G-датчика (ускорение Gin входа в N управление - ускорение Gout выхода из N управления), так и оценки изменения величины ускорения ΔG^, оцениваемой по сигналу Gsen G-датчика на стационарном транспортном средстве, на основе разности этих двух величин вычисляется значение коррекции Gd для коррекции ошибки дрейфа сигнала Gsen G-датчика для выполнения, таким образом, коррекции нулевой точки для сигнала Gsen G-датчика.
При возникновении ошибки дрейфа в сигнале G-датчика, с изменениями по времени и температуре, ускорение Gin входа в N управление, которое вычисляется на основе сигнала Gsen G-датчика, отклоняется от истинного значения (фактического ускорения) на ошибку дрейфа. С другой стороны, обнаруженная величина изменения ускорения ΔG, отображающая разность между ускорением Gin входа в N управление и ускорением Gout выхода из N управления, не подвержена влиянию ошибки дрейфа (т.е. не включает в себя ошибку дрейфа). Таким образом, определяя разность между обнаруженным изменением ускорения ΔG и оцениваемой величиной изменения ускорения ΔG^, можно получить точную величину коррекции Gd для исключения ошибки дрейфа сигнала Gsen G-датчика и более точно определить коррекцию нулевой точки.
Операция подавления ошибочной коррекции, вызванной вибрацией транспортного средства
ФИГ. 4 представляет собой временную диаграмму, отображающую логику возникновения ошибочной коррекции в момент коррекции нулевой точки в стандартной технологии. Предполагается, что транспортное средство останавливается на крутой дороге.
В момент времени t1 условие выполнения управления в нейтральном состоянии удовлетворяется, и начинается управление в нейтральном состоянии.
В момент времени t2 на основе сигнала Gsen-f G-датчика после прохождения через фильтр 13, по истечении заданного времени от начала управления в нейтральном состоянии, вычисляется ускорение Gin входа в N управление.
В момент времени t3, поскольку водитель снимает ногу с тормозной педали для выхода из управления в нейтральном состоянии, и в течение периода времени от t3 до t4 возникает откат транспортного средства назад.
В момент времени t4 сигнал Gsen-f G-датчика после прохождения через фильтр 13 идентифицируется как ускорение Gout выхода из N управления, находящееся дальше всего от ускорения входа в N управление, для получения как обнаруженной величины изменения ускорения ΔG, так и оценки величины изменения ускорения ΔG^. Затем из разности между этими двумя величинами вычисляется значение коррекции Gd, а затем, в течение периода времени до конца следующей операции управления в нейтральном состоянии, определяют градиент для управления в нейтральном состоянии, с использованием обнаруженного значения ускорения G, которое было скорректировано по ошибке дрейфа на это значение коррекции Gd.
Здесь, в течение периода времени t3 - t4, при переходе транспортного средства из стационарного состояния в состояние движения, сигнал Gsen G-датчика включает в себя компонент вибрации кузова транспортного средства, возникающий из-за торможения. Что касается компонента вибрации транспортного средства, предполагаются два следующих события.
(a) Вибрация, вызванная высвобождением, вследствие снятия с тормоза, крутящего момента в силовой передаче, который возникает из-за остановки транспортного средства, в ответ на включение торможения (примерно при 5 Гц).
(b) Вибрация, вызванная вибрацией подвески, связанной с изменением в перемещении подвески, вызванным изменением в пространственном положении транспортного средства, или в позиции транспортного средства, связанным с (a) или откатом транспортного средства назад.
Эти компоненты вибрации кузова транспортного средства не могут быть устранены фильтром 13 отсечки шума, расположенным после G-датчика 9, и все еще содержатся в сигнале Gsen-f G-датчика, прошедшем через фильтр 13. Поэтому сигнал Gsen-f G-датчика после прохождения фильтра 13 будет осциллировать с большой амплитудой, как показано на ФИГ. 4. Таким образом, в качестве ускорения выхода из N управления из точек максимумов выбирают точку максимума, находящуюся на наиболее удаленном расстоянии от ускорения Gin входа в N управление. Затем обнаруженная величина изменения ускорения Gd (=ΔG-ΔG^) становится меньше, чем значение, обнаруженное при откате транспортного средства назад, что приводит к вычислению избыточной величины коррекции Gd (=ΔG-ΔG^). Следовательно, в течение периода времени после момента времени t4, поскольку обнаруженное значение ускорения G будет скорректировано меньше, чем ускорение, соответствующее фактическому градиенту поверхности дороги, даже плоская дорога может быть ошибочно определена как наклонная дорога, с более чем 5%-ным градиентом, и управление в нейтральном состоянии может оказаться невозможным, с чем связано ухудшение в потреблении топлива.
В отличие от этого, в устройстве обнаружения ускорения первого варианта осуществления, перед блоком 15 вычисления G входа в N управление выполняется процесс фильтрации сигнала Gsen-f G-датчика, который прошел фильтр 13, блоком 20 устранения компонента вибрации, устраняющем компоненты частоты, связанные с вибрацией транспортного средства, содержащиеся в сигнале Gsen-f G-датчика. Поскольку частота среза для процесса фильтрации задана на уровне примерно 3 Гц, может быть получен такой сигнал Gsen-r G-датчика, который не содержит компонента частоты вибрации, характерной для высвобождения крутящего момента в силовой передаче (примерно при 5 Гц), и компонента частоты вибрации, характерной для вибрации подвески (примерно при 12 - 13 Гц). Таким образом, путем получения сигнала Gsen-r G-датчика после прохождения через блок 20 устранения компонента вибрации в течение периода времени между моментом времени t3 и моментом времени t4, при удаленном компоненте вибрации транспортного средства, вычисление величины избыточной коррекции, связанной с вибрацией кузова транспортного средства, может быть подавлено, и может быть исключена ситуация, при которой обнаруженное значение ускорения G корректируется избыточным образом умеренно, по сравнению с ускорением, соответствующим фактическому градиенту поверхности дороги.
В первом варианте осуществления, когда ключ зажигания выключается, значение коррекции Gd сбрасывается (до нуля). Как правило, для периода времени от момента времени, при котором ключ зажигания был выключен, до момента его следующего включения, поскольку температура внешней среды датчика 9 ускорения изменилась, ошибка дрейфа сигнала Gsen G-датчика также изменяется. При допущении, что величина коррекции Gdlim может быть не сброшена, в течение периода времени до выполнения управления в нейтральном состоянии, существует вероятность того, что сигнал Gsen G-датчика будет откорректирован на значение коррекции, отделенное от фактической ошибки дрейфа. Таким образом, при сбрасывании значения коррекции Gd каждый раз, при выключении ключа зажигания, ошибочная коррекция сигнала Gsen G-датчика в ходе следующего прогона будет подавляться.
Ниже приведено описание технических эффектов.
Устройство 12 обнаружения ускорения первого варианта осуществления обладает эффектами, перечисленными ниже.
(1) Устройство 12 обнаружения ускорения снабжено блоком 20 устранения компонента вибрации, который устраняет компонент вибрации кузова транспортного средства, содержащийся в сигнале G-датчика после прохождения фильтра 13 или ниже него, и блоком 21 коррекции нулевой точки, предназначенным для коррекции положения нулевой точки сигнала Gsen-f G-датчика после прохождения через фильтр 13, на значение коррекции Gd на основе сигнала Gsen-r G-датчика после устранения компонента вибрации кузова транспортного средства.
Поэтому ошибочная коррекция ошибки дрейфа из-за вибрации транспортного средства, обусловленной операцией снятия с тормоза, подавляется, чтобы тем самым повысить точность коррекции.
(2) Блок 20 устранения компонента вибрации сконфигурирован для устранения компонента вибрации транспортного средства (примерно 5 Гц), вызванного высвобождением крутящего момента в силовой передаче, вследствие чего значение коррекции Gd может быть вычислено на основе сигнала Gsen-r G-датчика, компонент вибрации которого, присущий высвобождению крутящего момента в силовой передаче, устраняется, с подавлением, таким образом, ошибочной коррекции ошибки дрейфа.
(3) Блок 20 устранения компонента вибрации сконфигурирован для устранения компонента вибрации транспортного средства (примерно 12 - 13 Гц), вызванного вибрацией подвески, так что значение коррекции Gd может быть вычислено на основе сигнала Gsen-r G-датчика, компонент вибрации которого, характерный для вибрации подвески, исключается для подавления при этом ошибочной коррекции ошибки дрейфа.
(4) Поскольку блок 20 устранения компонента вибрации сконфигурирован для осуществления фильтрационной обработки множества сигналов Gsen-f G-датчика после прохождения через фильтр 13, компонент вибрации кузова транспортного средства может быть эффективно устранен из сигнала Gsen-f G-датчика после прохождения через фильтр 13.
Второй вариант осуществления
Процесс обнаружения ускорения
ФИГ. 6 представляет собой диаграмму блока управления, отображающую конфигурацию устройства 31 обнаружения ускорения, встроенного в ECU 4 согласно второму варианту осуществления. Устройство обнаружения ускорения согласно второму варианту осуществления снабжено фильтром 13, блоком 33 устранения компонента вибрации (средством удаления компонента вибрации), блоком 14 вычисления ускорения G входа в N управление, блоком 15 вычисления ускорения G выхода из N управления, блоком 16 вычисления ΔG, блоком 32 оценки ускорения, блоком 19 вычисления значения коррекции и блоком 21 коррекции нулевой точки.
Блок 33 устранения вибрации устраняет компонент вибрации кузова транспортного средства при снятии с тормоза из сигнала Gsen-f G-датчика, прошедшего через фильтр 13, при переходе от стационарного состояния к состоянию движения, для вывода сигнала Gsen-r G-датчика. Во втором варианте осуществления, множество сигналов Gsen-f G-датчика, полученных в течение заданного периода времени, в котором имеется такой сигнал Gsen G-датчика, который представляет наибольший интервал от ускорения Gin входа в N управление, будут усреднены для вывода Gsen-r в течение периода времени между завершением управления в нейтральном состоянии и моментом времени, при котором движущая сила начинает передаваться на ведущие колеса, вследствие начала приведения в зацепление пусковой муфты в автоматической передаче 2.
Блок 15 вычисления G выхода из N управления устанавливает сигнал Gsen-r G-датчика, выходящий из блока 33 устранения компонента вибрации, устраняющего компонент вибрации кузова транспортного средства в качестве ускорения Gout выхода из N управления.
Блок 32 оценки ускорения рассчитывает оценку ускорения G^[g] на основе обнаруженного значения изменения ускорения ΔG, вычисленного блоком 16 вычисления ускорения G и при обращении к таблице вычисления эквивалентного ускорения для величины изменения ускорения-градиента. Величина изменения ускорения, возникающая вследствие отката транспортного средства назад, в ответ на завершение N управления, и градиент поверхности дороги являются одними и теми же для одного и того же транспортного средства, и градиент поверхности дороги может быть преобразован в ускорение, причем таблица вычисления эквивалентного ускорения для величины изменения ускорения-градиента может быть получена заранее путем экспериментов.
Блок 19 вычисления значения коррекции вычисляет значение коррекции Gd [g] путем вычитания ускорения Gin входа в N управление из оценки ускорения G^, вычисленной в блоке 32 оценки ускорения.
На ФИГ. 7 показана блок-схема последовательности операций процесса обнаружения ускорения, исполняемого устройством 31 обнаружения ускорения согласно второму варианту осуществления. Далее приведено описание каждого этапа. Следует отметить, что, присваивая одинаковые номера этапов этапам, на которых выполняются те же процессы, что и на этапах согласно первому варианту осуществления, показанному на ФИГ. 3, дублирующееся описание можно опустить.
На этапе S20 блок 33 устранения компонента вибрации вычисляет сигнал Gsen-r G-датчика, который устраняет вибрацию кузова транспортного средства из сигнала G-датчика, который прошел фильтр 13.
На этапе S21 блок 32 оценки ускорения вычисляет оценку ускорения G^ [g] на основе обнаруженной величины изменения ускорения ΔG, вычисленной на этапе S6, и при обращении к таблице вычисления эквивалентного ускорения для величины изменения ускорения-градиента.
На этапе S22 блок 19 вычисления значения коррекции вычисляет значение коррекции Gd [g] путем вычитания ускорения Gin входа в N управление из оценки ускорения G^, вычисленной на этапе S21.
Далее приведено описание операции коррекции нулевой точки на основе величины изменения ускорения при откате транспортного средства назад.
Устройство 31 обнаружения ускорения согласно второму варианту осуществления вычисляет значение коррекции Gd для коррекции ошибки дрейфа сигнала Gsen G-датчика на основе разности между оценкой ускорения G^, выводимой из изменения сигнала Gsen G-датчика (т.е. ускорение Gin входа в N управление - ускорение Gout выхода из N управления), и ускорения Gin входа в N управление для выполнения коррекции нулевой точки сигнала G-датчика.
При возникновении ошибки дрейфа в сигнале G-датчика, вследствие изменения температуры или старения, ускорение Gin входа в N управление, вычисляемое на основе сигнала G-датчика, отклоняется от своего истинного значения на ошибку дрейфа. С другой стороны, оценка ускорения G^, которая вычисляется из разности между ускорением Gin входа в N управление и ускорением Gout выхода из N управления, является свободной от влияния ошибки дрейфа (т.е. не включает в себя ошибку дрейфа). Таким образом, с учетом разности между оценкой ускорения G^ и ускорением Gin входа в N управление, значение коррекции, которое устраняет ошибку дрейфа в сигнале Gsen G-датчика, может быть получено с высокой точностью, вследствие чего можно получить более точную коррекцию нулевой точки.
Операция подавления ошибочной коррекции вследствие вибрации кузова транспортного средства
На ФИГ. 8 показана временная диаграмма, отображающая операцию подавления ошибочной коррекции во втором варианте осуществления.
Что касается периода времени между моментами времени t1 и t3, описание можно опустить, поскольку это те же операции, что и проиллюстрированные на ФИГ. 4 и 5.
В момент времени t3, поскольку водитель снимает ногу с тормозной педали, чтобы выйти из управления в нейтральном состоянии, в течение периода времени от t3 и до t4, возникает откат транспортного средства назад.
В момент времени t4 сигналы Gsen-f G-датчика после прохождения через фильтр 13 усредняются и устанавливаются как ускорение Gout выхода из N управления для получения как обнаруженной величины изменения ускорения ΔG, так и оценки величины изменения ускорения ΔG^. Затем из этих двух величин вычисляется значение коррекции Gd и затем, т.е. до конца следующего управления в нейтральном состоянии, выполняется определение градиента для управления в нейтральном состоянии, с использованием обнаруженного значения ускорения G, которое было откорректировано по ошибке дрейфа на это значение коррекции Gd.
В устройстве 31 обнаружения ускорения согласно второму варианту осуществления применяется процесс усреднения для сигнала G-датчика, прошедшего через фильтр 13 выше, или перед входом в блок 15 вычисления ускорения G входа в N управление, и, таким образом, устраняется компонент вибрации кузова транспортного средства, который включен в сигнал Gsen-f G-датчика. Процесс усреднения сигнала Gsen-f G-датчика обеспечит получение сигнала Gsen-r G-датчика, свободного от вибрации, связанной с высвобождением крутящего момента в силовой передаче, и вибрации, относящейся к вибрации подвески.
Поэтому вычисление избыточного корректирующего значения Gd, связанного с вибрацией кузова транспортного средства при отпускании тормоза, может быть подавлено, и обнаруженное значение ускорения G запрещается корректировать излишне умеренно, по отношению к ускорению, соответствующему действительной составляющей поверхности дороги.
Далее описаны технические эффекты.
В устройстве 31 обнаружения ускорения 31 согласно второму варианту осуществления, в дополнение к эффектам (1)-(3) согласно первому варианту осуществления, может быть достигнут следующий эффект.
(5) Блок 33 устранения компонента вибрации применяет процесс усреднения к сигналу Gsen-f G-датчика после множества фильтров 13, полученному при переходе из стационарного состояния в состояние движения, вследствие чего компонент вибрации кузова транспортного средства может быть эффективно устранен из сигнала Gsen-f G-датчика, прошедшего фильтр 13.
Другие примеры
Хотя конфигурация для осуществления настоящего изобретения была описана выше со ссылкой на варианты осуществления, конкретная конфигурация согласно настоящему изобретению не ограничена этими вариантами осуществления, и изменение конструкции и т.п. без отступления от сущности настоящего изобретения может находиться в рамках настоящего изобретения.
Например, фильтр для процесса фильтрации не ограничен фильтром задержки первого порядка или фильтром с запаздыванием, но можно использовать такой фильтр, как фильтр с запаздыванием второго порядка или полосовой фильтр.
Способ для процесса усреднения не ограничен арифметическим процессом усреднения, и можно также использовать среднее геометрическое или среднее гармоническое.
Способ коррекции обнаруженного значения ускорения G согласно настоящему изобретению не ограничен завершением управления в нейтральном состоянии, а может применяться в конце управления холостого хода, с эффектами, аналогичными эффектам для вышеописанных вариантов осуществления.

Изобретение относится к области контроля транспортных средств. Устройство обнаружения ускорения содержит блок (20) устранения компонента вибрации для устранения компонента вибрации кузова транспортного средства, содержащегося в сигнале (Gsen-f) датчика ускорения (G), прошедшем через фильтр (13), при переходе из остановленного состояния в состояние движения, и блок (21) коррекции нулевой точки для коррекции положения нулевой точки сигнала (Gsen-f) G-датчика, прошедшего через фильтр (13), с использованием значения коррекции (Gd) на основе сигнала (Gsen-r) G-датчика, в котором устранен компонент вибрации транспортного средства. Достигается точность коррекции ошибки дрейфа. 4 з.п. ф-лы, 8 ил.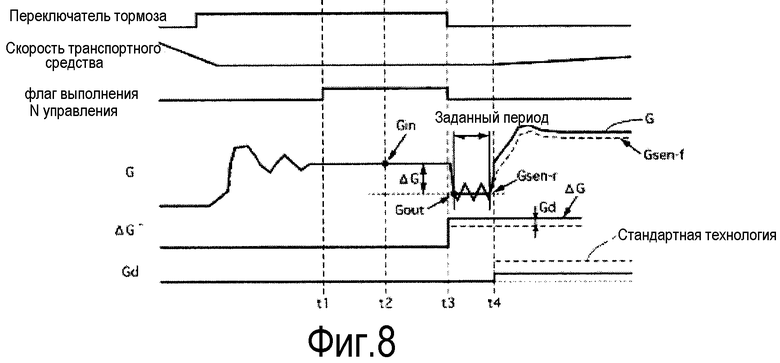
1. Устройство обнаружения ускорения, содержащее:
блок устранения компонента вибрации, который устраняет компонент вибрации кузова транспортного средства, включенный в сигнал датчика ускорения, при переходе из стационарного состояния транспортного средства в состояние движения, и
блок коррекции нулевой точки, который корректирует положение нулевой точки сигнала датчика ускорения на значение коррекции на основе сигнала датчика ускорения после устранения компонента вибрации кузова транспортного средства.
2. Устройство обнаружения ускорения по п.1, в котором
блок устранения компонента вибрации сконфигурирован для устранения компонента вибрации кузова транспортного средства, вызванного высвобождением кручения в силовой передаче.
3. Устройство обнаружения ускорения по п.1 или 2, в котором блок устранения компонента вибрации сконфигурирован для устранения компонента вибрации кузова транспортного средства, вызванного вибрацией подвески.
4. Устройство обнаружения ускорения по п.1 или 2, в котором блок устранения компонента вибрации сконфигурирован для применения процесса фильтрации к множеству сигналов ускорения, полученных при переходе из стационарного состояния транспортного средства в состояние движения.
5. Устройство обнаружения ускорения по п.1 или 2, в котором блок устранения компонента вибрации сконфигурирован для применения процесса усреднения к множеству сигналов ускорения, полученных при переходе из стационарного состояния транспортного средства в состояние движения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

