В целом настоящая заявка относится к области медицинской визуализации. Более конкретно, она предоставляет способ и систему для обнаружения персональных медицинских устройств и для проведения процедур медицинской визуализации у пациентов с использованием персонального медицинского устройства. Объект заявки находит применение по меньшей мере в компьютерной томографии (КТ) и описан с конкретной ссылкой на нее. Однако он также имеет более общее применение в других способах визуализации и в других областях, таких как рентген, флуороскопия, магнитный резонанс (МР), однофотонная эмиссионная компьютерная томография (ОФЭКТ), позитронно-эмиссионная томография (ПЭТ) и ультразвук (УЗ).
Недавние исследования показали потенциал взаимодействия между персональными медицинскими устройствами и излучением визуализации, таким как рентгеновское излучение, используемое в КТ. Такие персональные медицинские устройства включают в качестве не ограничивающих примеров устройства управления сердечным ритмом, дефибрилляторы, нейростимуляторы, насосы для вливаний лекарственных средств (например, насосы для инсулина), кохлеарные имплантаты и имплантаты сетчатки. Рентгеновское излучение может вмешиваться в работу персонального медицинского устройства или обусловливать нарушение работы устройства. Взаимодействие с рентгеновским излучением, которое может иметь место при использовании этих устройств во время КТ сканирования, включает образование сигналов помех (например, импульсов дефибрилляции сердца), неправильную интерпретацию или неправильное определение сигналов устройства в качестве действительных физиологических сигналов и сброс или изменение программы настроек персонального медицинского устройства. Каждое такое возможное взаимодействие потенциально может привести к нежелательным явлениям.
В настоящее время вероятность нежелательных явлений, связанных с вызванным рентгеновским излучением взаимодействием с персональным медицинским устройством и/или нарушением его работы, не полностью понята или описана. В настоящее время в отношении большинства зарегистрированных КТ технологий известно ограниченное количество сведений о персональных медицинских устройствах. Кроме того, тип и местоположение персональных медицинских устройств значительно меняется от пациента к пациенту. Также между пациентами имеют место значительные различия клинических факторов, воздействующих на пациента, которые могут указывать на присутствие персонального медицинского устройства. По указанным выше и другим причинам желательно предоставить способ и систему для определения присутствия персонального медицинского устройства и для сбора информации относительно устройства. Кроме того, желательно предоставить способ и систему для адаптации или персонализации процедур медицинской визуализации для снижения риска рентгеновского излучения, взаимодействующего с персональным медицинским устройством. Также желательно предоставить способ и систему для соблюдения баланса между качеством изображения, получаемого посредством конкретной процедуры медицинской визуализации, и риском возможного взаимодействия с устройством или нарушения его работы, если необходимо сканировать через персональное медицинское устройство. В итоге также желательно предоставить систему для сопряжения с базами данных медицинских записей, нормативными базами данных, базами данных медицинских устройств или базами данных других типов для сбора информации относительно персонального медицинского устройства конкретного пациента.
Аспекты по настоящему изобретению касаются этих и других вопросов.
По одному из аспектов по настоящему изобретению предоставлены способ и система для обнаружения присутствия персонального медицинского устройства внутри пациента. По другому аспекту настоящего изобретения, предоставлены способ и система для определения местоположения и типа персонального медицинского устройства, а также других характеристик устройства. Согласно другому аспекту по изобретению предоставлены способ и система для адаптации или персонализации процедуры медицинской визуализации, чтобы избежать взаимодействия с персональным медицинским устройством или для снижения риска взаимодействия с устройством или нарушения его работы. Согласно еще одному другому аспекту по изобретению предоставлены способ и система для соблюдения баланса между качеством изображения, получаемого посредством конкретной процедуры медицинской визуализации, и риском возможного взаимодействия с персональным медицинским устройством, если необходимо сканировать через персональное медицинское устройство. По другому аспекту настоящего изобретения предоставлены способ и система для сопряжения с базами данных медицинских записей, нормативными базами данных, базами данных медицинских устройств или базами данных других типов для сбора информации относительно персонального медицинского устройства конкретного пациента и для обновления указанных баз данных с использованием дополнительной информации относительно персонального медицинского устройства, если что-либо собрано.
Специалисты в данной области оценят другие дополнительные аспекты по настоящему изобретению после прочтения и понимания следующего подробного описания. Многие дополнительные преимущества и выгоды станут очевидны специалистам в данной области после прочтения подробного описания предпочтительных вариантов осуществления. Изобретение может принимать форму в виде различных компонентов и компоновок компонентов, а также в виде различных технологических операций и последовательностей технологических операций. Фигуры приведены лишь с целью иллюстрирования предпочтительных вариантов осуществления и их не следует толковать в качестве ограничения изобретения.
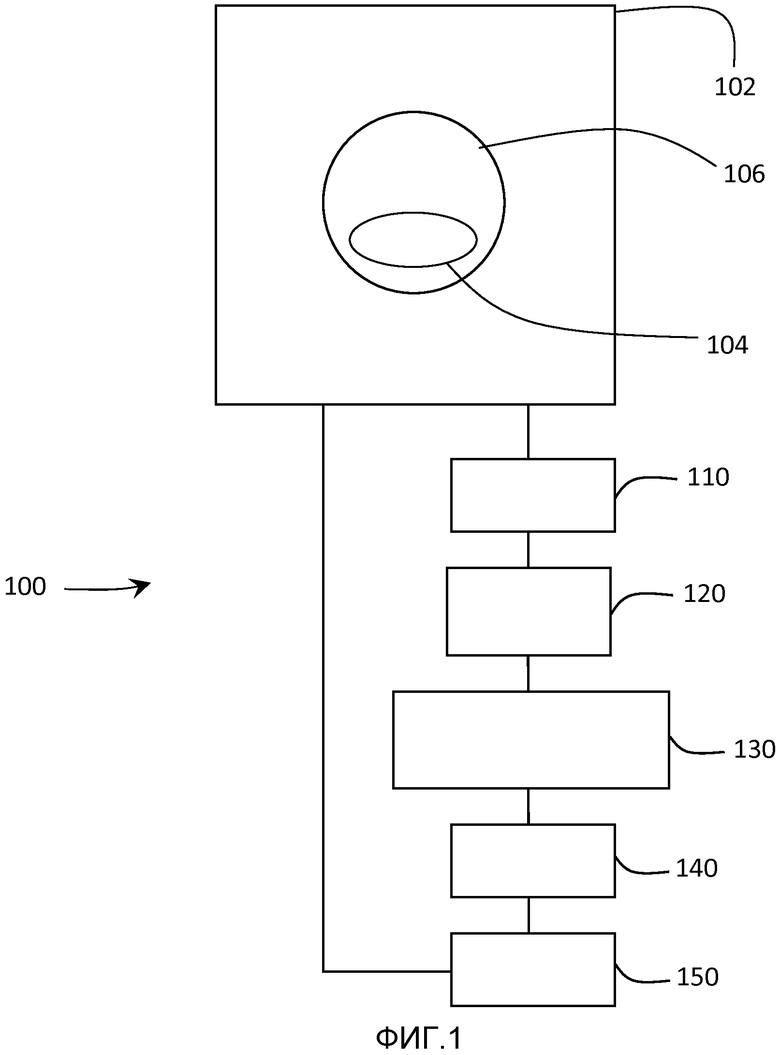
На фиг. 1 представлено схематическое изображение образцовой системы КТ визуализации согласно одному варианту осуществления настоящего изобретения;
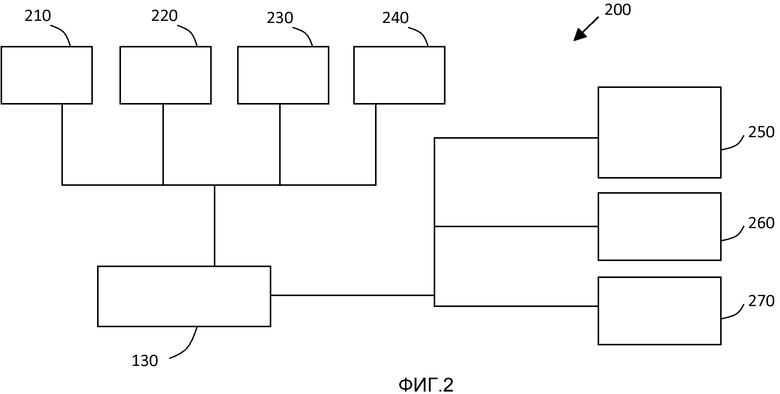
на фиг. 2 представлено схематическое изображение образцовой сети медицинской визуализации согласно одному варианту осуществления настоящего изобретения;
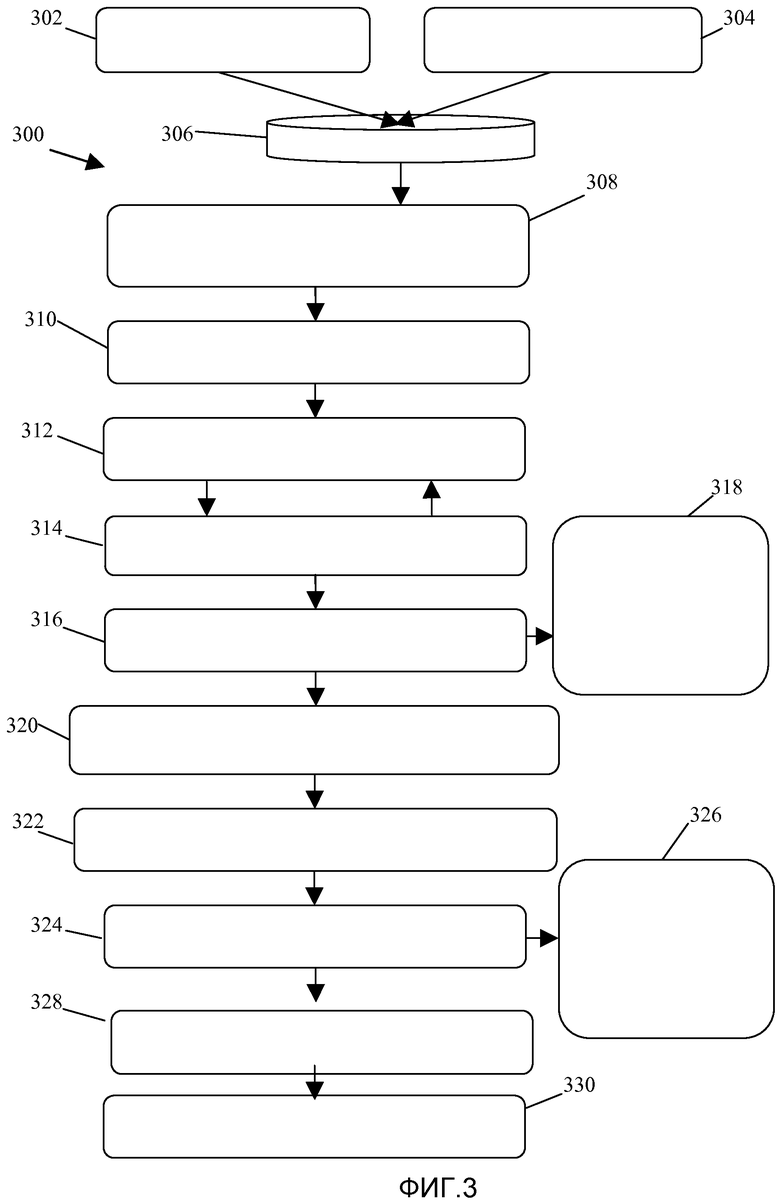
на фиг. 3 изображен способ медицинской визуализации согласно одному варианту осуществления настоящего изобретения;
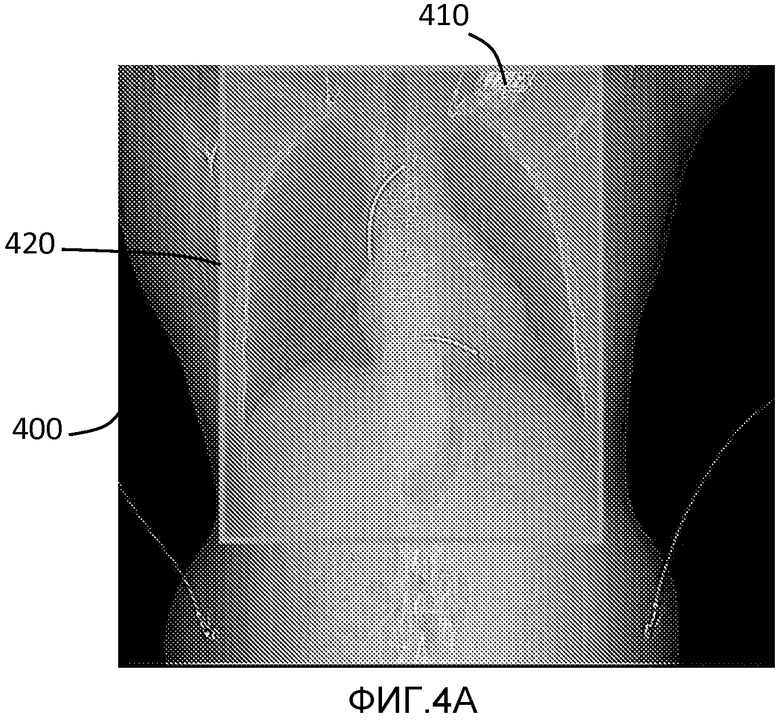
на фиг. 4A представлено образцовое реконструированное изображение обзорного КТ сканирования, сгенерированного программным обеспечением, на котором показано имплантированное устройство управления сердечным ритмом (ИУУСР) и проиллюстрирован планируемый сканируемый диапазон, который содержит ИУУСР; и
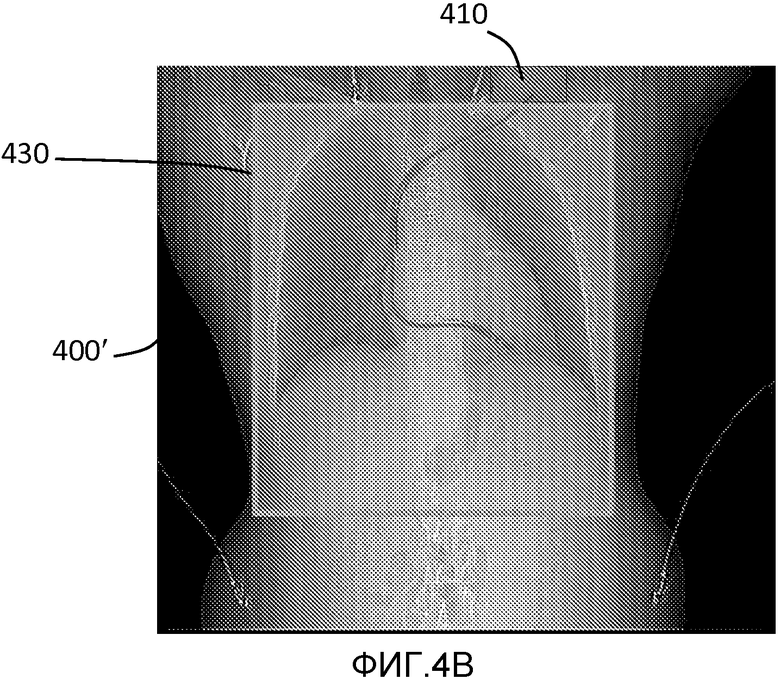
на фиг. 4B представлено образцовое реконструированное изображение обзорного КТ сканирования, сгенерированного программным обеспечением по одному из аспектов по настоящему изобретению (того же изображения обзорного сканирования с фиг. 4A), где ИУУСР определен и выделен на реконструированном КТ изображении и проиллюстрирован планируемый сканируемый диапазон, который скорректирован для снижения риска взаимодействия с ИУУСР.
В настоящее время для получения медицинских изображений используют системы визуализации нескольких различных типов. Системы визуализации таких типов включают КТ, ПЭТ, ОФЭКТ, МРТ и другие системы визуализации. Образцовая система 100 КТ визуализации проиллюстрирована на фиг. 1. Однако, как уже указано, способ и система визуализации, описанные в настоящем документе, также имеют применение в связи с системами визуализации различных других типов или с сочетаниями систем визуализации тех типов, которые отличны от рассмотренных в настоящем документе в прямой форме.
Как проиллюстрировано на фиг. 1, образцовая система 100 КТ визуализации содержит устройство 102 КТ визуализации. Репрезентативный субъект, подлежащий визуализации, который представлен как 104 на фиг. 1, частично помещен в отверстие 106 устройства 102 КТ визуализации. Образцовая система 100 КТ визуализации также содержит память 110, процессор 120 изображений, модуль 130 медицинского устройства, дисплей 140 и ввод 150 пользователя. Процессор 120 изображений получает рентгеновские данные от устройства 102 КТ визуализации для генерации КТ изображений. Данные рентгеновского изображения, получаемые посредством устройства 102 КТ визуализации, хранят в памяти 110. Данные рентгеновского изображения, хранимые в памяти 110, обрабатывают посредством процессора 120 данных визуализации. Процессор 120 генерирует изображение визуализируемого субъекта 104 на основе данных рентгеновского изображения в соответствии с математическим алгоритмом или алгоритмами. Изображение можно отображать на соответствующем дисплее 140. Для пользователя можно предусмотреть ввод 150 пользователя для управления компонентами системы 100 КТ визуализации. Различные компоненты системы 100 КТ визуализации, включая модуль 130 медицинского устройства, можно интегрировать в устройство 102 КТ визуализации или разместить удаленно от устройства 102 КТ визуализации.
Модуль 130 медицинского устройства выполнен с возможностью получения данных о пациенте относительно пациента и анализа данных о пациенте для определения информации относительно любого персонального медицинского устройства(в), которое имеет пациент. В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства выполнен с возможностью сопряжения с различными информационными базами данных. Образцовая сеть 200 медицинской визуализации проиллюстрирована на фиг. 2. Как показано на фиг. 2, модуль 130 медицинского устройства образцового варианта осуществления выполнен с возможностью сопряжения с электронными медицинскими записями («ЭМЗ») 210, больничными информационными системами («БИС») 220, радиологическими информационными системами («РИС») 230 и системами 240 архивирования и передачи изображений («САПИ»). Как показано на фиг. 2, модуль 130 медицинского устройства образцового варианта осуществления также выполнен с возможностью сопряжения с базами 250, 260, 270 данных, предоставленных и/или обсуживаемых производителями медицинских устройств, производителями сканеров медицинской визуализации и/или регулирующими органами. Модуль 130 медицинского устройства также можно адаптировать для сопряжения с различными другими базами данных или совокупностями информации в дополнительных вариантах осуществления. Следует понимать, что в различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства не сопрягают с какими-либо базами данных. В дополнительных вариантах осуществления системы 100 КТ визуализации, модуль 130 медицинского устройства можно сопрягать с одной или несколькими базами данных, представленными на фиг. 2, но можно не сопрягать со всеми этими базами данных.
В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства выполнен с возможностью анализа данных изображения для определения присутствия персонального медицинского устройства. Как применяют в настоящем документе, «персональное медицинское устройство» означает любое медицинское устройство, которое имплантировано полностью или частично внутри пациента или размещено снаружи и пациент носит его или оно приклеено к нему, включая в качестве не ограничивающих примеров устройства управления сердечным ритмом, дефибрилляторы, нейростимуляторы, насосы для вливаний лекарственных средств (например, насосы для инсулина), кохлеарные имплантаты и имплантаты сетчатки. В модуле 130 медицинского устройства используют математический алгоритм, такой как алгоритм сравнения с порогом, анализа связанной компоненты, обобщенного преобразования Хафа (GHT), алгоритм сегментации на основе модели или другой подходящий алгоритм или алгоритмы для анализа данных изображения на присутствие персонального медицинского устройства. Данные изображения, анализируемые модулем 130 медицинского устройства, можно получить из двухмерного или трехмерного обзорного сканирования (т.е. добавочного сканирования) или из полного сканирования. В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства осуществляет этот анализ с использованием данных изображения, которые собирают у пациента во время текущей процедуры визуализации (и хранят в памяти 110 системы 100 КТ визуализации или в каком-либо другом месте) или с использованием данных изображения, которые предварительно получены у пациента перед процедурой(ами) визуализации и которые хранят в системе 240 архивирования и передачи изображений или в каком-либо другом месте. Данные изображения, которые анализируют посредством модуля 130 медицинского устройства для определения присутствия персонального медицинского устройства, также можно использовать для коррекции ослабления.
В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства выполнен с возможностью определения местоположения персонального медицинского устройства. В таких вариантах осуществления модуль 130 медицинского устройства анализирует данные, получаемые из алгоритмов анатомической сегментации, таких как грудные или сердечные алгоритмы анатомической сегментации, для определения и регистрации местоположения персонального медицинского устройства относительно внутренних или внешних опорных маркеров, таких как грудина, ребра или ключицы. В других вариантах осуществления модуль 130 медицинского устройства определяет местоположение персонального медицинского устройства относительно планируемого диапазона сканирования визуализации и регистрирует местоположение медицинского устройства относительно диапазона сканирования. В других дополнительных вариантах осуществления модуль 130 медицинского устройства определяет относительное местоположение персонального медицинского устройства посредством анализа данных изображения, которые предварительно получены у пациента перед процедурой(ами) визуализации, и сравнения (например, способы регистрации изображений) с данными изображения, которые собирают у пациента во время текущей процедуры визуализации.
Как указано ранее, различные варианты осуществления системы 100 КТ визуализации содержат модуль 130 медицинского устройства, который выполнен с возможностью сопряжения с базами данных. Такие базы данных могут включать ЭМЗ 210, БИС 220, РИС 230, САПИ 240 и регистры 250 производителей медицинских устройств, проиллюстрированные на фиг. 2. Модуль 130 медицинского устройства по этим вариантам осуществления может опрашивать одну или несколько этих баз данных для сбора информации относительно присутствия, местоположения и/или дополнительных характеристик персонального медицинского устройства конкретного пациента.
Например, модуль 130 медицинского устройства может опрашивать ЭМЗ 210, чтобы определить, имеет ли пациент персональное медицинское устройство и, если так, то собрать информацию относительно персонального медицинского устройства. Такая информация может включать, например, тип, местоположение, ориентацию, производителя, модель или другие характеристики устройства. Схожим образом модуль 130 медицинского устройства также может собирать схожую информацию из других баз данных, например, таких как БИС 220 или РИС 230. Модуль 130 медицинского устройства может определять, что пациент имеет конкретное устройство (например, дефибриллятор конкретной модели) или может определять, что пациент имеет устройство, которое входит в общую категорию или серию (например, дефибриллятор, конкретная серия моделей дефибрилляторов и т.д.). Если известно или определено, что пациент имеет конкретное изделие и модель или категорию персонального медицинского устройства, то затем модуль 130 медицинского устройства может опросить базу 250 данных производителей устройств, базу 260 данных производителей сканеров медицинской визуализации или базы 270 данных регулирующих органов для сбора информации относительно устройства этой конкретной модели или категории устройств, такой как эксплуатационные параметры, профили чувствительности к изучению или другие характеристики устройства.
В различных вариантах осуществления модуль 130 медицинского устройства собирает и анализирует информацию (т.е. данные о пациенте) из нескольких источников для классификации персонального медицинского устройства. Например, в различных вариантах осуществления модуль 130 медицинского устройства использует информацию, собранную из данных изображения, для классификации персонального медицинского устройства. Например, модуль 130 медицинского устройства может использовать морфологические данные и данные о признаке ослабления изображения (включая таковые о мультиэнергетических или спектральных признаках), которые собраны в обзорном сканировании или полном сканировании. Модуль 130 медицинского устройства также может комбинировать эту информацию с данными, не относящимися к изображению, (например, информацию, собранную в ЭМЗ 210, БИС 220 и/или РИС или других базах данных) для дополнительной классификации персонального медицинского устройства. Например, модуль 130 медицинского устройства может использовать нейронную сеть, генетический алгоритм, способ опорных векторов или другие способы анализа данных изображения для определения типа медицинского устройства, имплантированного пациенту. После того как модуль 130 медицинского устройства классифицирует медицинское устройство, эту информацию можно использовать для обращения к базам данных для определения дополнительных характеристик медицинского устройства. Например, когда модуль 130 медицинского устройства классифицирует тип, производителя и/или модель персонального медицинского устройства, модуль 130 медицинского устройства может опросить базы 250 данных производителей медицинских устройств, базы 260 данных производителей сканеров медицинской визуализации и/или базы 270 данных регулирующих органов для определения профиль чувствительности устройства к излучению. Или, например, модуль медицинского устройства может определять информацию о свойствах ослабления персонального медицинского устройства для использования в коррекции ослабления.
В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства предоставляет клиницисту или другому оператору системы 100 КТ визуализации предупреждение, если персональное медицинское устройство обнаружено внутри пациента, готового для прохождения процедуры визуализации. Предоставленное предупреждение может представлять собой звуковое предупреждение и/или визуальное предупреждение или может представлять собой предупреждение в какой-либо другой форме. В различных вариантах осуществления модуль 130 медицинского устройства выделяет местоположение персонального медицинского устройства на реконструированном изображении (таком как обзорное сканирование) посредством подходящего способа. Такие способы могут предоставлять оператору системы 100 КТ визуализации информацию относительно местоположения, ориентации или типа персонального медицинского устройства. Модуль 130 медицинского устройства представляет эту информацию оператору системы 100 КТ визуализации по желанию в визуальной или какой-либо другой форме, такой как цветной или полутоновый накладной слой (как проиллюстрировано, например, на фиг. 4B). Эту информацию можно представить оператору КТ на консоли сканирования, дисплее портала, таком как сенсорный дисплей, или каким-либо другим образом. В дополнение к предупреждению и/или информации относительно персонального медицинского устройства, модуль 130 медицинского устройства также может направлять оператора КТ через различные этапы процедуры визуализации. Например, оператора КТ можно направлять через различные необходимые этапы в ответ на определение персонального медицинского устройства у пациента посредством подсказок, представленных на сенсорном дисплее портала.
В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства также может передавать уведомление (например, электронное письмо, страницу, SMS, телефонный звонок и т.д.) главному технологу, специалисту (например, кардиологу, неврологу и т.д.), радиологу или другому медицинскому персоналу. Это уведомление можно передавать перед началом процедуры сканирования, во время процедуры или после процедуры. Таким образом, можно вызвать такой медицинский персонал, если дополнительная экспертиза необходима или до или после процедуры сканирования. Например, экспертизу кардиолога можно запросить перед началом конкретной процедуры сканирования вследствие обнаружения устройства управления сердечным ритмом внутри планируемого сканируемого диапазона.
Когда модуль 130 медицинского устройства определяет, что пациент имеет персональное медицинское устройство, классифицирует устройство и информирует оператора о присутствии устройства, модуль 130 медицинского устройства по различным вариантам осуществления настоящего изобретения необязательно персонализирует планируемые процедуры визуализации для конкретного пациента. Например, модуль 130 медицинского устройства может использовать собранную информацию о типе и местоположении персонального медицинского устройства для коррекции дозы облучения или мощности дозы облучения, вводимой через персональное медицинское устройство. Это может снизить риск того, что воздействие первичного пучка на медицинское устройство превышает предварительно определяемый порог радиационного воздействия. Такие предварительно определяемые пороги радиационного воздействия можно устанавливать для конкретного персонального медицинского устройства с помощью производителей персональных медицинских устройств, для локальной политики больницы, регулирующего органа или другого учреждения в сочетании со специфическими для пациента признаками (например, конституционные особенности телосложения, масса). Когда модуль 130 медицинского устройства определяет, что пациент имеет персональное медицинское устройство конкретного типа, модуль 130 медицинского устройства может опросить различные базы данных, как указано выше, для определения порога радиационного воздействия, который задан для устройства этого типа.
Кроме того, модуль 130 медицинского устройства может автоматически корректировать или изменять дополнительные параметры процедуры медицинской визуализации или предлагать ручную коррекцию в ответ на собранную информацию о персональном медицинском устройстве. Такие параметры включают напряжение трубки, ток трубки, время оборота портала, шаг спирали и другие параметры. Кроме того, модуль 130 медицинского устройства может корректировать параметры модуляции дозы, такие как, например, автоматический выбор тока трубки, модуляция дозы по оси z, угловая модуляция дозы, комбинация модуляции дозы по оси z и угловой модуляции дозы и/или органоспецифическая модуляция дозы. Модуль 130 медицинского устройства также может выбирать или отменять выбор клиновидного или двойного клиновидного компенсаторных фильтров и динамическую коллимацию с концевым эффектом в зависимости от собранной информации относительно персонального медицинского устройства. В дополнительных вариантах осуществления модуль 130 медицинского устройства изменяет или корректирует дополнительные параметры, настройки или характеристики процедур медицинской визуализации для снижения риска того, что процедура визуализации повредит или иным образом повлияет на работу персонального медицинского устройства. В различных вариантах осуществления модуль 130 медицинского устройства также может планировать или оптимизировать терапию в целом (например, лучевую терапию) для конкретного пациента в противоположность персонализации только одной процедуры медицинской визуализации. В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства изменяет диапазон сканирования планируемой процедуры визуализации на основе типа или местоположения персонального медицинского устройства. Например, если модуль 130 медицинского устройства определяет, что пациент имеет имплантированное устройство управления сердечным ритмом (ИУУСР) или какое-либо другое персональное медицинское устройство, которое размещено внутри или около планируемого диапазона сканирования, модуль медицинского устройства может изменять диапазон сканирования с тем, чтобы избежать вреда для ИУУСР.
Кроме того, модуль 130 медицинского устройства может представить или предложить оператору один или несколько альтернативных протоколов сканирования, которые снижают риск вреда для персонального медицинского устройства, если определено, что персональное медицинское устройство расположено внутри или около планируемого диапазона сканирования. Если определяют, что персональное медицинское устройство размещено внутри планируемого диапазона сканирования и планируемый диапазон сканирования не может или не будет изменен, модуль 130 медицинского устройства по различным вариантам осуществления может соблюдать баланс между качеством изображения и риском взаимодействия с устройством или нарушением его работы. В таких случаях модуль медицинского устройства может изменять или персонализировать различные параметры процедуры медицинской визуализации, что приведет к снижению качества изображения, но также приведет к снижению риска взаимодействия с персональным медицинским устройством.
В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства перемещает кушетку, которая поддерживает пациента во время визуализации, чтобы содействовать размещению необязательного экранирования от рентгеновского излучения, такого как висмутовый экран, поверх той области организма пациента, которая содержит персональное медицинское устройство для экранирования медицинского устройства от радиационного воздействия. Чтобы дополнительно облегчить этот процесс экранирования от излучения, модуль 130 медицинского устройства также может проецировать лазерные лучи на местоположение персонального медицинского устройства или иным образом маркировать его для того, чтобы показать оператору область организма пациента, на которой следует разместить экран.
Модуль 130 медицинского устройства по различным вариантам осуществления системы 100 КТ визуализации необязательно осуществляет мониторинг физиологических сигналов пациента, таких как электрокардиографические (ЭКГ), электроэнцефалографические (ЭЭГ) или другие физиологические сигналы, во время процедур медицинской визуализации для мониторинга возможных индуцированных КТ нарушений. Например, если модуль 130 медицинского устройства обнаруживает, что пациент имеет имплантированное устройство управления сердечным ритмом (ИУУСР), модуль 130 медицинского устройства необязательно осуществляет мониторинг работы сердца пациента через ЭКГ, чтобы предупредить оператора, если во время процедуры визуализации в работе сердца пациента имеют место какие-либо нарушения. Таким образом, процедуру визуализации можно остановить в случае нарушения работы ИУУСР пациента или в случае каких-либо других нарушений с тем, чтобы можно было стабилизировать пациента и предоставить срочную медицинскую помощь. Мониторинг физиологических сигналов, который осуществляет модуль 130 медицинского устройства, можно адаптировать на основе типа персонального медицинского устройства, которое имеет пациент. Например, посредством модуля 130 медицинского устройства можно осуществлять мониторинг различных физиологических сигналов, если пациент имеет насос для инсулина, а не водитель ритма сердца.
Модуль 130 медицинского устройства по различным вариантам осуществления системы 100 КТ визуализации выполнен с возможностью обновления различных баз данных, таких как ЭМЗ 210, БИС 220 и/или РИС 230, с использованием собранной информации о персональном медицинском устройстве(ах) конкретного пациента. Например, модуль 130 медицинского устройства в эти базы данных добавляет или обновляет информацию относительно присутствия, местоположения, ориентации, типа, производителя и модели персонального медицинского устройства, которое имеет пациент. Кроме того, модуль 130 медицинского устройства по различным вариантам осуществления в эти базы данных может добавлять или обновлять информацию относительно параметров сканирования, которые используют для конкретной процедуры медицинской визуализации, или физиологических сигналов пациента, которые измеряли во время процедуры визуализации. Кроме того, модуль 130 медицинского устройства необязательно уведомляет соответствующий медицинский персонал, такой как терапевт, кардиолог, невролог пациента или другие сотрудники здравоохранения, о том, что медицинские записи пациента изменены или обновлены. Это может сигнализировать им об осуществлении мониторинга пациента для определения присутствия каких-либо возможных индуцированных излучением изменений в устройстве или его работе.
Модуль 130 медицинского устройства по различным вариантам осуществления системы 100 КТ визуализации генерирует опрос или опросный лист после процедуры медицинской визуализации для КТ технолога или пациента для того, чтобы подтвердить присутствие или отсутствие каких-либо индуцированных КТ взаимодействий с персональным медицинским устройством. После заполнения опросного листа оператором КТ или пациентом модуль 130 медицинского устройства необязательно передает результаты опроса наряду с информацией относительно персонального медицинского устройства и проведенной процедуры медицинской визуализации в отдел обеспечения качества больницы, производителю сканера, производителю персонального медицинского устройства и/или регулирующим органам. Одной из служб регулирующих органов является MedWatch, программа отчетов о нежелательных явлениях и добровольной информации об обеспечении безопасности Управления США по надзору за качеством пищевых продуктов и лекарственных средств.
Далее, на фиг. 3 проиллюстрирован способ 300 определения и ответа на образцовое персональное медицинское устройство по одному из аспектов по настоящему изобретению. На этапе 302 систему 100 КТ визуализации используют для получения данных 306 изображения обзорного сканирования или обзора визуализируемого субъекта 104. На этапе 304 данные 306 изображения из предыдущих процедур визуализации пациента получают из системы 240 архивирования и передачи изображений или другого источника(ов). Как указано ранее, данные 306 изображения из обзорного сканирования или из предыдущей процедуры сканирования можно использовать с целью определения присутствия персонального медицинского устройства в соответствии с аспектами по настоящему изобретению. Для определенных модальностей визуализации, таких как МР, обзорные сканирования можно не использовать по различным причинам. Таким образом, в зависимости от того, используют ли данные изображения из обзорного сканирования или из предыдущих процедур сканирования, можно выполнять только один из этапа 302 или этапа 304. Однако в дополнительных вариантах осуществления, в которых используют данные изображения как из обзорного сканирования, так и из предыдущей процедуры сканирования для определения присутствия персонального медицинского устройства, выполняют оба этапа 302 и 304. В других дополнительных вариантах осуществления данные изображения не анализируют. Предпочтительнее для определения информации об устройстве используют только информацию, полученную из одной или нескольких баз данных (таких как ЭМЗ 210, БИС 220, РИС 230, САПИ 240 и/или регистры 250 производителей устройств и т.д.) на этапе 312.
В определенных вариантах осуществления используют данные изображения из модальности изображения, отличной от той, к прохождению которой подготовили пациента. Например, перед началом процедуры МР визуализации можно анализировать данные обзорного КТ сканирования или КТ изображения из предыдущих КТ сканирований пациента, чтобы помочь обеспечить то, что не совместимое с МР персональное медицинское устройство не попадет в магнитное/РЧ поле.
На этапе 308 модуль 130 медицинского устройства анализирует данные 306 изображения на присутствие персонального медицинского устройства. Как указано ранее, модуль 130 медицинского устройства использует математический алгоритм(ы), такой как алгоритм определения порога, анализа связанной компоненты, обобщенного преобразования Хафа (GHT), сегментации на основе модели(ей) или другой подходящий алгоритм(ы) для анализа данных 306 изображения на присутствие персонального медицинского устройства. Если определяют, что устройство отсутствует, процесс 300 останавливают. Если определяют, что устройство присутствует, процесс 300 продолжают.
На этапе 310 модуль 130 медицинского устройства анализирует данные 306 изображения для определения местоположения персонального медицинского устройства, если оно присутствует. Например, модуль 130 медицинского устройства анализирует данные, полученные из алгоритмов анатомической сегментации, таких как грудные или сердечные алгоритмы анатомической сегментации, для определения местоположения персонального медицинского устройства относительно внутренних или внешних опорных маркеров пациента, таких как грудина, ребра или ключицы.
На этапе 312 модуль 130 медицинского устройства опрашивает одну или несколько баз данных, таких как электронные медицинские записи («ЭМЗ») 210, больничные информационные системы («БИС») 220, радиологические информационные системы («РИС») 230, системы 240 архивирования и передачи изображений («САПИ»), база(ы) 250 данных производителей персональных медицинских устройств, база(ы) 260 данных производителей сканеров медицинской визуализации и/или база(ы) 270 данных регулирующих органов или другие базы данных, для сбора информации о персональном медицинском устройстве(ах) пациента. Модуль 130 медицинского устройства опрашивает эти базы данных для сбора информации относительно присутствия, местоположения, ориентации, типа, модели, производителя и/или профиля чувствительности к излучению или относительно любых других уместных характеристик любых персональных медицинских устройств, которые может иметь конкретный пациент. В определенных вариантах осуществления настоящего изобретения модуль 130 медицинского устройства может опрашивать одну или несколько этих баз данных. В дополнительных вариантах осуществления модуль 130 медицинского устройства может не опрашивать какие-либо базы данных, а полагаться только на данные 306 изображения.
Модуль 130 медицинского устройства можно соединить с каждой из этих баз данных различными способами, такими как проводная сеть, беспроводная сеть, одноранговая сеть, сеть клиент/сервер или любым другим подходящим способом. Также модуль 130 медицинского устройства можно не соединять напрямую с этими базами данных. Вместо этого содержимое этих баз данных можно загрузить в устройство памяти, расположенное внутри самого модуля 130 медицинского устройства, в память 110 системы 100 КТ визуализации или в какое-либо другое устройство памяти, с которым соединен этот модуль 130 медицинского устройства и от которого получает информацию.
На этапе 314 модуль 130 медицинского устройства использует информацию, собранную из данных изображения на этапе 308 и/или посредством опроса базы(з) данных на этапе 312, для классификации персонального медицинского устройства если оно присутствует. В различных вариантах осуществления модуль 130 медицинского устройства использует морфологические данные и данные о признаке ослабления изображения (включая таковые о мультиэнергетических или спектральных признаках) или другие данные изображения, собранные на этапе 308, и/или данные не изображения, собранные на этапе 312, для классификации персонального медицинского устройства. Например, модуль 130 медицинского устройства может использовать нейронную сеть, генетический алгоритм, способ опорных векторов или другие способы в анализе данных изображения для определения типа медицинского устройства, имплантированного пациенту. Затем эту информацию комбинируют с информацией, собранной из опрошенных баз данных, например, о типе, производителе, модели, профиле чувствительности устройства к излучению и с другими характеристиками медицинского устройства.
Этапы 312 и 314 можно осуществлять итеративно по порядку для синхронизации информации, полученной из различных источников. В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства может опрашивать несколько баз данных на этапе 312 или одновременно или по порядку. Также модуль 130 медицинского устройства может собирать информацию из базы данных или баз данных на этапе 312 для сбора определенной информации и затем повторно опросить ту же самую базу(ы) данных или дополнительную базу(ы) данных для сбора дополнительной информации. Например, модуль 130 медицинского устройства может определять тип, производителя и модель персонального медицинского устройства на основе опроса одной базы данных, такой как база 220 данных больничных информационных систем. Затем эту информацию можно использовать, например, для опроса другой базы данных, такой как база 250 данных производителей устройств, для определения дополнительной информации, такой как профиль чувствительности к излучению персонального медицинского устройства.
Если персональное медицинское устройство обнаружено посредством модуля 130 медицинского устройства, модуль 130 медицинского устройства уведомляет оператора КТ о присутствии персонального медицинского устройства посредством звукового и/или визуального предупреждения на этапе 316. Например, модуль 130 медицинского устройства может издавать звуковой сигнал или другое предупреждение для того, чтобы оповестить оператора КТ о присутствии персонального медицинского устройства и о возможной необходимости определенных действий со стороны оператора КТ.
В отношении присутствия персонального медицинского устройства может иметь место несоответствие между информацией, собранной из баз данных на этапе 312, и определением, которое осуществляет модуль 130 медицинского устройства на основе данных изображения на этапе 308. В этом случае модуль 130 медицинского устройства укажет оператору КТ, что дополнительное исследование необходимо на этапе 318. Например, модуль 130 медицинского устройства может определить присутствие персонального медицинского устройства на основе анализа данных 306 изображения на этапе 308 и при этом не обнаружит записей о таком персональном медицинском устройстве в опрошенных базах данных на этапе 312. Аналогичным образом, опрошенные базы данных на этапе 312 могут содержать информацию относительно присутствия персонального медицинского устройства, которое более не присутствует или не обнаружено в данных 306 изображения модулем 130 медицинского устройства.
Аналогичным образом, также могут возникать несоответствия в отношении присутствия персонального медицинского устройства, если используют данные изображения как из обзорного сканирования, так и из предыдущих процедур визуализации пациента. Например, пациент может быть должен иметь персональное медицинское устройство во время предыдущей процедуры визуализации, которое затем удаляют или заменяют. В таких случаях оператор КТ или другой медицинский работник будет осуществлять ручную процедуру обнаружения персонального медицинского устройства в ответ на подсказку на этапе 318 определить, имеет ли пациент персональное медицинское устройство. Эти процедуры могут включать визуальную проверку, запрос о пациенте, пальпацию соответствующих областей пациента или другие запросы. После этой ручной исследовательской процедуры оператор КТ может ввести информацию в модуль 130 медицинского устройства, чтобы разрешить несоответствие относительно присутствия персонального медицинского устройства.
На этапе 320 модуль 130 медицинского устройства выделяет местоположение персонального медицинского устройства на реконструированном изображении (таком как обзорное сканирование). Например, можно использовать цветной или полутоновый накладной слой. Таким образом, оператору системы 100 КТ визуализации предоставляют информацию относительно местоположения персонального медицинского устройства. В различных вариантах осуществления модуль 130 медицинского устройства также визуально представляет местоположение персонального медицинского устройства относительно планируемого диапазона сканирования визуализации для оператора системы 100 КТ визуализации через дисплей 140 или некоторое другое отображающее устройство по желанию.
На фиг. 4A проиллюстрировано образцовое реконструированное изображение обзорного КТ сканирования 400, генерируемое программным обеспечением. Изображение 400 содержит имплантированное устройство управления сердечным ритмом (ИУУСР) 410. Также проиллюстрирован планируемый сканируемый диапазон 420, который содержит ИУУСР 410. Далее, как показано на фиг. 4B, проиллюстрировано образцовое реконструированное изображение обзорного КТ сканирования 400', генерируемое программным обеспечением по одному из аспектов по настоящему изобретению. Изображение 400' генерировали на основе тех же данных, используемых для генерации изображения 400. Однако в изображении обзорного сканирования 400' с фиг. 4B имплантированное устройство управления сердечным ритмом 410 определено и выделено по отношению к планируемому диапазону 430 сканирования.
На этапе 322 модуль 130 медицинского устройства персонализирует процедуру медицинской визуализации в ответ на определение персонального медицинского устройства. Как описано ранее, модуль 130 медицинского устройства может использовать собранную информацию о типе, местоположении и/или ориентации персонального медицинского устройства для коррекции дозы облучения или мощности дозы облучения, которую введут через персональное медицинское устройство. Кроме того, модуль 130 медицинского устройства может корректировать напряжение трубки, ток трубки, время оборота портала, шаг спирали или другие параметры планируемой процедуры сканирования. Кроме того, модуль 130 медицинского устройства может корректировать параметры модуляции дозы (например, автоматический выбор тока трубки, модуляцию дозы по оси z, угловую модуляцию дозы, сочетание модуляции дозы по оси z и угловой модуляции дозы и/или органоспецифической модуляции дозы). Модуль 130 медицинского устройства также может выбирать или отменять выбор клиновидного или двойного клиновидного компенсаторных фильтров или динамической коллимации с концевым эффектом в зависимости от собранной информации относительно персонального медицинского устройства. В дополнительных вариантах осуществления модуль 130 медицинского устройства изменяет или корректирует дополнительные параметры, настройки или характеристики процедур медицинской визуализации для снижения риска того, что процедура визуализации повредит работе персонального медицинского устройства или иным образом вмешается в нее.
В различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства изменяет диапазон сканирования планируемой процедуры визуализации на основе типа, местоположения и/или ориентации персонального медицинского устройства. На фиг. 4B также показано, что планируемый диапазон 430 сканирования изменен по сравнению с планируемым диапазоном 420 сканирования с фиг. 4A. Диапазон 430 сканирования изменен для того, чтобы избежать сканирования через имплантированное устройство 410 управления сердечным ритмом. Кроме того, модуль 130 медицинского устройства может предлагать или советовать оператору один или несколько альтернативных протоколов сканирования, которые будут снижать риск повреждения персонального медицинского устройства, если определено, что персональное медицинское устройство расположено внутри или около планируемого диапазона сканирования.
Также, как описано ранее, в различных вариантах осуществления системы 100 КТ визуализации модуль 130 медицинского устройства перемещает кушетку, которая поддерживает пациента во время визуализации, для того, чтобы содействовать размещению необязательного экрана от рентгеновского излучения, такого как висмутовый экран, поверх той области организма пациента, которая содержит персональное медицинское устройство для экранирования медицинского устройства от радиационного воздействия. Чтобы дополнительно облегчить этот процесс экранирования от излучения, модуль 130 медицинского устройства также может проецировать лазерные лучи на местоположение персонального медицинского устройства или иным образом маркировать его для того, чтобы показать оператору область организма пациента, на которой следует разместить экран.
На этапе 324 модуль 130 медицинского устройства осуществляет мониторинг физиологических сигналов пациента во время процедуры медицинской визуализации, такой как электрокардиографические (ЭКГ), электроэнцефалографические (ЭЭГ) или другие физиологические сигналы для мониторинга возможных индуцированных КТ нарушений. Таким образом, процедуру визуализации можно остановить, если имеют место какие-либо нарушения с тем, чтобы можно было стабилизировать пациента и предоставить срочную медицинскую помощь. Мониторинг физиологических сигналов, который осуществляет модуль 130 медицинского устройства, можно адаптировать на основе типа персонального медицинского устройства, которое имеет пациент. На этапе 326 модуль 130 медицинского устройства предупреждает оператора КТ и/или останавливает процесс медицинской визуализации, если в физиологических сигналах пациента происходят какие-либо опасные нарушения.
На этапе 328 модуль медицинского устройства обновляет различные базы данных, такие как электронные медицинские записи («ЭМЗ») 210, больничные информационные системы («БИС») 220, радиологические информационные системы («РИС») 230, с использованием собранной информации о персональном медицинском устройстве(ах) конкретного пациента. Например, модуль 130 медицинского устройства в эти базы данных добавляет или обновляет информацию относительно присутствия, местоположения, типа, ориентации, производителя, модели персонального медицинского устройства, которое имеет пациент. Кроме того, модуль 130 медицинского устройства по различным вариантам осуществления также в эти базы данных добавляет или обновляет информацию относительно параметров сканирования, используемых для конкретной процедуры медицинской визуализации или физиологических сигналов пациента, которые измеряли во время процедуры визуализации. Кроме того, на этапе 328 модуль 130 медицинского устройства необязательно уведомляет соответствующих специалистов-медиков, что медицинские записи пациента изменены или обновлены и сигнализирует им об осуществлении мониторинга пациента для определения присутствия каких-либо возможных индуцированных излучением изменений в устройстве или его поведении.
На этапе 330 модуль 130 медицинского устройства генерирует опрос или опросный лист для оператора КТ. Цель этого опроса состоит в том, чтобы подтвердить присутствие или отсутствие каких-либо индуцированных КТ взаимодействий с персональным медицинским устройством. После заполнения опросного листа оператором КТ модуль 130 медицинского устройства необязательно передает результаты опроса наряду с информацией относительно персонального медицинского устройства и проведенной процедуры медицинской визуализации в отдел обеспечения качества больницы, производителю сканера, производителю персонального медицинского устройства и/или в регулирующий орган.
Различные варианты осуществления настоящего изобретения могут включать ранее рассмотренные этапы способа в различном порядке. Например, в различных вариантах осуществления одну или несколько баз данных можно опрашивать перед анализом данных 306 изображения. Например, пациента можно регистрировать на системе КТ визуализации для процедуры визуализации. После регистрации пациента модуль 130 медицинского устройства может опросить одну или несколько баз данных (таких как ЭМЗ 210, БИС 220, РИС 230, САПИ 240 и/или база(ы) 250 данных производителей персональных медицинских устройств) для определения присутствия у пациента персонального медицинского устройства. Если опрос этой базы(з) данных отражает историю персонального медицинского устройства, уведомления относительно присутствия устройства и любую другую известную информацию об устройстве можно передать оператору КТ. Если доступны данные 306 изображения пациента (такие как данные обзорного сканирования или изображения из предыдущей процедуры визуализации), данные 306 изображения затем можно анализировать на присутствие персонального медицинского устройства. Если данные 306 изображения пациента не доступны, то можно провести обзорное сканирование пациента. Альтернативно в определенных вариантах осуществления данные 306 изображения не анализируют и используют только информацию, полученную при опросе одной или нескольких баз данных.
Кроме того, различные варианты осуществления могут включать меньшее или большее число этапов по сравнению с предварительно описанным. Например, один из вариантов осуществления настоящего изобретения может идентифицировать присутствие и местоположение персонального медицинского устройства, но не изменяет планируемую процедуру медицинской визуализации в ответ на определение персонального медицинского устройства.
Настоящее изобретение можно реализовать различными путями. Модуль 130 медицинского устройства можно предоставить в качестве компонента устройства медицинской визуализации, такого как КТ сканер. Модуль 130 медицинского устройства также можно предоставить на рабочей станции, соединенной с устройством медицинской визуализации, в качестве компонента сетевого запоминающего устройства или базы данных архивирования изображений, такой как САПИ, или в качестве приложения внутри программного обеспечения главного компьютера. Модуль 130 медицинского устройства также можно реализовать в устройстве медицинской визуализации и/или соединить с ним через приложение, веб-сервис и/или модель провайдера прикладных услуг (ASP) через стандартные протоколы передачи изображений/данных и стандарты (например, DICOM, HL7, HTTP, SOAP, XML). Как описано ранее, это изобретение применимо к различным модальностям визуализации, таким как ПЭТ, ОФЭКТ, КТ, МР, ультразвук, рентген, флуороскопия или другим модальностям изображений или системе, в которой объединены одна или несколько этих модальностей изображения. Модуль 130 медицинского устройства может содержать несколько частей или компонентов, каждый из которых расположен в различных местоположениях.
Указанные выше функции, такие как, например, анализ данных изображения для определения присутствия персонального медицинского устройства, анализ данных изображения для определения местоположения персонального медицинского устройства, классификация персонального медицинского устройства на основе данных изображения и информации, собранной при опросе базы(з) данных, персонализация, изменение, начальные и/или завершающие сканирования, выбор желаемого сканирования или протоколов реконструкции, манипуляция объемными данными и т.п., можно реализовать в виде логики программного обеспечения. «Логика», как применяют в настоящем документе, включает в качестве не ограничивающих примеров аппаратное обеспечение, встроенное программное обеспечение, программное обеспечение и/или их сочетания для осуществления функции(й) или действия(й) и/или для того, чтобы предписывать другому компоненту выполнять функцию или действие. Например, основываясь на желаемом применении или потребностях, логика может включать управляемый программным обеспечением микропроцессор, дискретную логику, такую как специализированная интегральная схема (ASIC), или другое программируемое логическое устройство. Также логику можно полностью реализовать в виде программного обеспечения.
«Программное обеспечение», как применяют в настоящем документе, включает в качестве не ограничивающих примеров одну или несколько машиночитаемых и/или исполняемых инструкций, которые управляют компьютером или другим электронным устройством для осуществления функций, действий и/или поведения в желаемом ключе. Инструкции можно осуществить в различных формах, таких как подпрограммы, алгоритмы, модули или программы, включая отдельные приложения или код из динамически подключаемых библиотек. Программное обеспечение также можно реализовать в различных формах, таких как автономная программа, вызов функции, сервлет, апплет, инструкции, хранимые в памяти, часть операционной системы или исполняемые инструкции других типов. Специалист в данной области примет во внимание, что форма программного обеспечения зависит, например, от требований, связанных с желаемым применением, системой, в которой его запускают и/или с желаниями разработчика/программиста или т.п.
Системы и способы, описанные в настоящем документе, можно реализовать на различных платформах, включая, например, сетевые системы управления и независимые системы управления. Дополнительно логику, базы данных или таблицы, показанные и описанные в настоящем документе, предпочтительно расположены в или на машиночитаемом носителе, таком как компонент системы 100 визуализации, например память 110 или процессор изображений 120. Примеры различных машиночитаемых носителей включают флэш-память, постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), программируемое постоянное запоминающее устройство (ППЗУ), электрически программируемое постоянное запоминающее устройство (ЭППЗУ), электрически стираемое программируемое постоянное запоминающее устройство (ЭППЗУ), магнитный диск или ленту, оптические носители, включая CD-ROM и DVD-ROM, и другие. Кроме того, процессы и логику, описанные в настоящем документе, можно объединить в одну большую последовательность процессов или можно разделить на несколько подпоследовательностей процессов. Порядок, в котором последовательности процессов описаны в настоящем документе, не критичен, и его можно изменить, при условии достижения тех же результатов. Действительно, последовательности процессов, описанные в настоящем документе, можно по необходимости или желанию изменить, объединить и/или реорганизовать в их реализации.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. Модификации и изменения могут прийти на ум после прочтения и понимания предыдущего подробного описания. Предполагают, что изобретение создано включающим все такие модификации и изменения в такой мере, что они входят в объем приложенной формулы изобретения или ее эквивалентов.
Предоставлены способ и система для обнаружения присутствия персонального медицинского устройства внутри пациента. Способ включает анализ данных изображения пациента с использованием модуля медицинского устройства и определение наличия персонального устройства внутри пациента. Обнаруженное медицинское устройство классифицируют. Далее получают первый набор данных о пациенте с использованием модуля медицинского устройства на основании классифицированного персонального медицинского персонального устройства посредством опроса первой базы данных с использованием модуля медицинского устройства. Первый набор данных включает в себя тип персонального медицинского устройства. На основании первого набора данных опрашивают вторую базу данных о пациенте, чтобы получить второй набор данных о пациенте. Второй набор включает в себя свойства ослабления персонального медицинского устройства. Посредством модуля медицинского устройства изменяют медицинскую процедуру в ответ на первый и второй наборы данных о пациенте. Система включает в себя модуль медицинского устройства, содержащий машиночитаемый носитель, содержащий логику, выполненную с возможностью осуществления способа. Использование изобретения обеспечивает надежную работу персонального медицинского устройства при проведении процедур медицинской визуализации. 2 н. и 9 з.п. ф-лы, 5 ил.
1. Способ обнаружения присутствия персонального медицинского устройства внутри пациента (104), подготовленного к прохождению медицинской процедуры, включающий в себя этапы, на которых:
анализируют данные изображения пациента с использованием модуля медицинского устройства и определяют наличие персонального медицинского устройства внутри пациента;
классифицируют персональное медицинское устройство из данных изображения в ответ на определение наличия персонального медицинского устройства;
получают первый набор данных о пациенте для пациента (104) с использованием модуля (130) медицинского устройства, причем первый набор данных о пациенте для пациента получают посредством опроса, на основании классифицированного персонального медицинского устройства, первой базы данных с использованием модуля медицинского устройства, включающего в себя тип персонального медицинского устройства;
опрашивают вторую базу данных на основании первого набора данных о пациенте, чтобы получить второй набор данных о пациенте, причем второй набор данных о пациенте включает в себя свойства ослабления персонального медицинского устройства;
изменяют медицинскую процедуру посредством модуля медицинского устройства в ответ на первый набор данных о пациенте и второй набор данных о пациенте.
2. Способ по п.1, в котором первый набор данных о пациенте дополнительно включает в себя ориентацию и местоположение персонального медицинского устройства.
3. Способ по п.2, в котором данные (306) изображения получают из обзорного сканирования пациента (104) или из по меньшей мере одной предыдущей процедуры сканирования пациента (104).
4. Способ по любому из предыдущих пунктов, в котором опрос второй базы данных содержит опрос по меньшей мере одной из базы данных производителей медицинских устройств, базы данных производителей сканеров медицинской визуализации и базы данных регулирующих органов.
5. Способ по п.4, в котором опрос первой базы данных содержит опрос по меньшей мере одной из: базы (210) данных электронных медицинских записей, базы (220) данных больничной информационной системы, базы (230) данных радиологической информационной системы и базы (240) данных систем архивирования и передачи изображений.
6. Способ по любому из пп.1-3, который дополнительно содержит этап визуального представления персонального медицинского устройства (410) на реконструированном изображении (400) пациента (104) относительно планируемого диапазона (420) сканирования медицинской процедуры.
7. Система для обнаружения присутствия персонального медицинского устройства (410) внутри пациента (104), система содержит:
модуль (130) медицинского устройства;
причем модуль (130) медицинского устройства содержит машиночитаемый носитель, который содержит логику, выполненную с возможностью:
классификации персонального медицинского устройства из данных изображения;
получения первого набора данных о пациенте для пациента (104), причем первый набор данных о пациенте для пациента получают посредством опроса, на основании классифицированного персонального медицинского устройства, первой базы данных с использованием модуля медицинского устройства, причем первый набор данных о пациенте включает в себя тип персонального медицинского устройства;
опрашивания второй базы данных, чтобы получить второй набор данных о пациенте, на основании первого набора данных о пациенте, причем второй набор данных о пациенте включает в себя свойства ослабления персонального медицинского устройства; и
изменения медицинской процедуры посредством модуля медицинского устройства в ответ на первый набор данных о пациенте и второй набор данных о пациенте.
8. Система по п.7, в которой данные о пациенте для пациента (104) получены из данных (306) изображения.
9. Система по п.8, в которой первый набор данных о пациенте дополнительно включает в себя ориентацию и местоположение персонального медицинского устройства.
10. Система по п.9, в которой модуль (130) медицинского устройства выполнен с возможностью опроса по меньшей мере одного из: базы (210) данных электронных медицинских записей, базы (220) данных больничной информационной системы, базы (230) данных радиологической информационной системы и базы (240) данных систем архивирования и передачи изображений.
11. Система по пп.7-9 или 10, в которой модуль (130) медицинского устройства выполнен с возможностью визуального представления персонального медицинского устройства (410) на реконструированном изображении (400) пациента (104) относительно планируемого диапазона (420) сканирования медицинской процедуры.
| WO 2008146228 A1, 04.12.2008 | |||
| US 2005177050 A1, 11.08.2005 | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| О.Л.Бокери и др | |||
| "Безопасность проведения | |||

