Изобретение относится к оптическому приборостроению и может быть использовано при конструировании оптико-механических устройств стендов, предназначенных для измерения углов.
Из уровня техники заявителю известен стенд для контроля параллельности и перпендикулярности оптических осей оптических устройств, описанный в свидетельстве на полезную модель RU №33643, МПК G01B 9/00, публикация 27.10.2003 г. Стенд содержит два коллиматора, оптические оси которых параллельны между собой. Причем на стенде установлены четыре стеклянные пластины так, что их поверхности перпендикулярны друг другу. Два коллиматора выполнены в виде автоколлиматоров. Стенд снабжен дополнительными автоколлиматорами по числу юстируемых каналов. Автоколлиматоры установлены так, чтобы их оптические оси были перпендикулярны поверхностям стеклянных пластин. Стенд дополнен двумя автоколлимационными приборами, установленными перед стеклянными пластинами, и пентагональным отражателем, размещенным между пластинами с возможностью его поворота в четыре положения. Но у данного стенда нет возможности измерения горизонтальных углов между нормалями к зеркальным поверхностям призменных блоков или других зеркальных элементов и к базовому отражателю, расположенных на значительном расстоянии друг от друга и на разных уровнях, из-за необходимости иметь большие габариты пластин, к которым предъявляются высокие требования по клиновидности и плоскостности, что очень сложно обеспечить для крупногабаритных деталей.
Наиболее близким техническим решением является устройство для измерения горизонтального угла, описанное в свидетельстве на полезную модель RU №39946, МПК G01B 11/26, публикация 20.08.2004 г., содержащее автоколлиматор, пентагональный отражатель, задающее (базовое) и контрольное (контролируемое) зеркала, расположенные в перпендикулярных плоскостях, на разных уровнях. При этом задающее зеркало выполнено с диаметром, большим диаметра контрольного зеркала, кроме того, устройство содержит второй автоколлиматор, расположенный параллельно первому, а также дополнительные два автоколлиматора с осями, параллельными друг другу и основным автоколлиматорам, второе контрольное зеркало и пентагональный отражатель, установленный перед дополнительными автоколлиматорами. В каждой паре автоколлиматоров один наведен на задающее зеркало и предназначен для определения угла между нормалью к задающему зеркалу и визирной осью автоколлиматора. Второй автоколлиматор, выставленный так, чтобы его визирная ось была параллельна визирной оси первого автоколлиматора, направляет световой поток через пентагональный отражатель на контрольное зеркало и служит для определения угла между нормалью к контрольному зеркалу и визирной осью второго автоколлиматора. Угол между нормалями к задающему и контрольному зеркалам определяется по формуле, в которую входят фактически измеренные углы между нормалью к задающему зеркалу и визирной осью первого автоколлиматора; между нормалью к контрольному зеркалу и визирной осью второго автоколлиматора, кроме того, учитывается ошибка изготовления угла между зеркальными гранями пентагонального отражателя. Но при этом увеличивается погрешность измерения в виду использования при измерении каждого горизонтального угла двух автоколлиматоров, из-за наличия трех операций наведения и снятия отсчетов - при выставке первого автоколлиматора относительно задающего зеркала; второго автоколлиматора параллельно первому; второго автоколлиматора относительно контрольного зеркала; а также отсутствует возможность измерения горизонтального угла при повороте контрольного зеркала вокруг оси, параллельной контрольному зеркалу и горизонтальной плоскости, из-за большого угла отражения светового потока в вертикальной плоскости, превышающего угловое поле автоколлиматора.
Задачей изобретения является создание оптической системы стенда для измерения горизонтального угла с повышенными функциональными возможностями.
Технический результат - обеспечение возможности измерения с высокой точностью углов между контролируемыми элементами, установленными на значительном расстоянии друг от друга на одной платформе, имеющей возможность наклонов в двух взаимоперпендикулярных плоскостях, и неподвижным отражателем.
Это достигается тем, что в оптической системе стенда для измерения горизонтального угла, содержащей автоколлиматор, оптически связанный с базовым отражателем, и контролируемые элементы с зеркальными поверхностями, которые оптически связаны с пентагональными отражателями, причем контролируемые элементы с зеркальными поверхностями установлены на одной платформе и расположены в перпендикулярных плоскостях и на разных уровнях относительно неподвижного базового отражателя, на значительном расстоянии друг от друга, в отличие от известного, между автоколлиматором и базовым отражателем введен первый зеркальный ромб со светоделителем, обеспечивающий в проходящем свете попадание светового потока через второй зеркальный ромб на базовый отражатель, а в отраженном свете оптически связывающий автоколлиматор и пентагональные отражатели, причем пентагональные отражатели смещены в вертикальном направлении относительно оси автоколлиматора, перед зеркальными поверхностями контролируемых элементов установлены клиновые компенсаторы, платформа с контролируемыми элементами выполнена с возможностью поворотов вокруг двух взаимоперпендикулярных осей, параллельных горизонтальной плоскости, причем одна из осей параллельна зеркальным поверхностям контролируемых элементов, а автоколлиматор выполнен фотоэлектрическим.
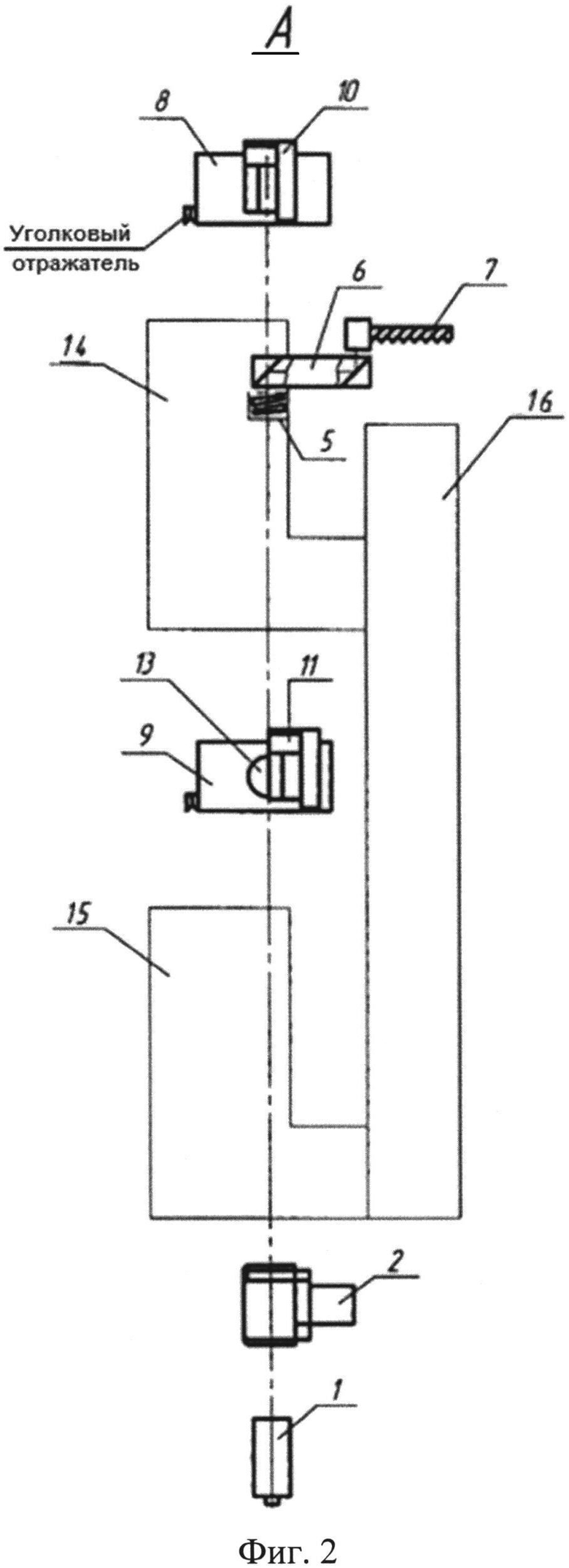
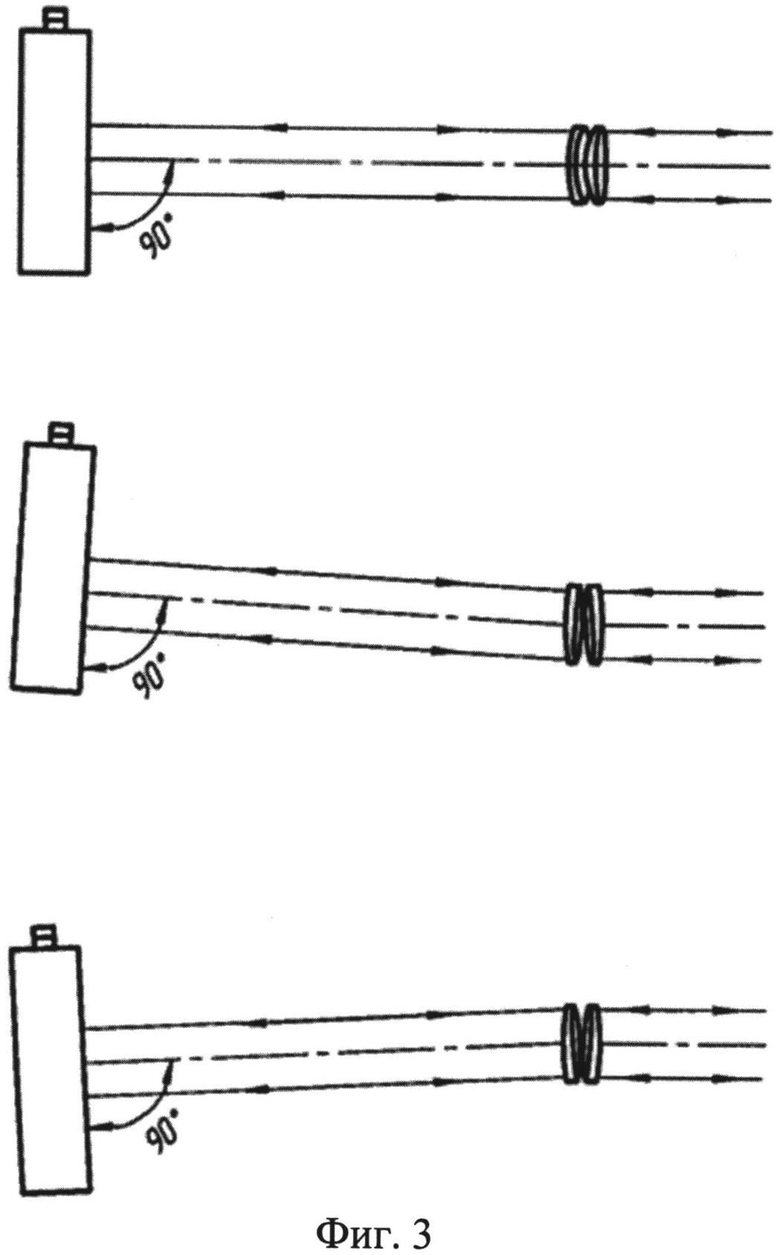
Предлагаемое изобретение иллюстрируется чертежами, где на фиг. 1 представлена схема оптической системы в горизонтальной плоскости, на фиг. 2 изображена схема оптической системы в проекции по стрелке А фиг. 1, на фиг. 3 показан ход лучей за клиновым компенсатором.
Оптическая система стенда (фиг. 1, фиг. 2) состоит из фотоэлектрического автоколлиматора 1, имеющего светодиодную подсветку тест-объекта, за которым расположен первый зеркальный ромб 2, включающий светоделительную пластину 3 и зеркало 4 и служащий для разделения излучения от фотоэлектрического автоколлиматора 1 на два параллельных световых потока, один из которых через светоделительную пластину 3 первого зеркального ромба 2, котировочные клинья 5, второй зеркальный ромб 6 попадает на базовый отражатель 7. Котировочные клинья 5 используются для обеспечения в плоскости приемника фотоэлектрического автоколлиматора 1 заданных координат изображения тест-объекта от базового отражателя 7 относительно положений изображений тест-объекта от зеркальных поверхностей призменных блоков 8 и 9 и выставляются при юстировке оптической системы, далее их положение остается неизменным. Второй световой поток, отраженный от светоделительной пластины 3 и зеркала 4 первого зеркального ромба 2, попадает на пентагональные отражатели 10 и 11, имеющие смещение в вертикальной плоскости относительно оси фотоэлектрического автоколлиматора 1, приводящее к разделению светового потока на две половины, верхняя из которых через пентагональный отражатель 10, клиновой компенсатор 12 попадает на зеркальную поверхность призменного блока 8. Нижняя половина светового потока, отраженная от пентагонального отражателя 11, через клиновой компенсатор 13 попадает на зеркальную поверхность призменного блока 9. Призменные блоки 8 и 9 находятся на одной платформе, которая может поворачиваться на заданные углы вокруг двух взаимоперпендикулярных осей, параллельных горизонтальной плоскости, при этом одна ось параллельна зеркальным поверхностям призменных блоков 8 и 9, от нулевого положения, при котором зеркальные поверхности призменных блоков 8, 9 перпендикулярны горизонтальной плоскости и параллельны между собой в горизонтальной плоскости. Клиновые компенсаторы 12, 13 используются для компенсации угла отражения светового потока от зеркальных поверхностей призменных блоков 8, 9, возникающего в вертикальной плоскости при вращении платформы вокруг оси, параллельной горизонтальной плоскости и зеркальной поверхности соответствующих призменных блоков 8, 9, и превышающего угловое поле фотоэлектрического автоколлиматора 1. В каждый клиновой компенсатор 12, 13 входит пара клиньев, поворачивающихся на равные углы в противоположных направлениях от нулевого положения, при котором главные сечения клиньев параллельны горизонтальной плоскости, а наружные поверхности клиньев имеют угол наклона относительно оси вращения клиньев, обеспечивающий отсутствие уводов светового потока в горизонтальной плоскости во всем диапазоне углов поворота клиньев. Углы поворота платформы с призменными блоками 8, 9 вокруг оси, параллельной горизонтальной плоскости и зеркальным поверхностям призменных блоков 8, 9, и углы поворота клиньев клиновых компенсаторов 12, 13 связаны определенным законом, что обеспечивает направление падения светового потока в вертикальной плоскости после выхода из клиновых компенсаторов 12, 13, близкое к нормали к зеркальным поверхностям призменных блоков 8, 9 во всем диапазоне углов поворота платформы, и, следовательно, их попадание в обратном ходе в фотоэлектрический автоколлиматор 1.
На фиг. 3 показан ход лучей за клиновым компенсатором 12 или 13 в вертикальной плоскости при нулевом положении призменного блока 8 или 9 и углах поворота вокруг оси, параллельной горизонтальной плоскости и зеркальной поверхности призменного блока 8 или 9.
Работает оптическая система следующим образом.
Световой поток от фотоэлектрического автоколлиматора 1, отраженный от светоделительной пластины 3 и зеркала 4 первого зеркального ромба 2, попадает на пентагональные отражатели 10 и 11, которые имеют смещение относительно оси фотоэлектрического автоколлиматора 1 в вертикальной плоскости, приводящее к разделению светового потока на две половины, верхняя из которых через пентагональный отражатель 10, клиновой компенсатор 12 попадает на зеркальную поверхность призменного блока 8, отразившись от которой и пройдя в обратном ходе через перечисленные выше компоненты, попадает в фотоэлектрический автоколлиматор 1, формирующий изображение тест-объекта в плоскости приемника. Нижняя половина светового потока через пентагональный отражатель 11, клиновой компенсатор 13 попадает на зеркальную поверхность призменного блока 9, после отражения от которой проходит в обратном ходе через указанные для прямого хода компоненты и попадает в фотоэлектрический автоколлиматор 1, строящий изображение тест-объекта в плоскости приемника.
Призменные блоки 8 и 9 находятся на одной платформе, которая может поворачиваться вокруг двух взаимоперпендикулярных осей, параллельных горизонтальной плоскости, при этом одна ось параллельна зеркальной поверхности призменных блоков 8 и 9, от нулевого положения, при котором зеркальные поверхности призменных блоков 8 и 9 перпендикулярны горизонтальной плоскости и параллельны между собой в горизонтальной плоскости.
Для компенсации угла отражения светового потока от зеркальных поверхностей призменных блоков 8 и 9, возникающего в вертикальной плоскости при вращении платформы вокруг оси, параллельной горизонтальной плоскости и зеркальной поверхности призменных блоков 8 и 9, и превышающего угловое поле фотоэлектрического автоколлиматора 1, клинья каждого клинового компенсатора 12, 13 поворачиваются на равные углы в противоположных направлениях от нулевого положения, при котором главные сечения клиньев параллельны горизонтальной плоскости, а наружные поверхности клиньев имеют угол наклона относительно оси вращения клиньев, обеспечивающий отсутствие уводов светового потока в горизонтальной плоскости во всем диапазоне углов поворота клиньев. Углы поворота платформы с призменными блоками 8 и 9 вокруг оси, параллельной горизонтальной плоскости и зеркальной поверхности призменных блоков 8 и 9, и углы поворота клиньев клиновых компенсаторов 12, 13 связаны определенным законом, что обеспечивает направление падения светового потока в вертикальной плоскости после выхода из клиновых компенсаторов 12 и 13, близкое к нормали к зеркальным поверхностям призменных блоков 8 и 9 во всем диапазоне углов поворота платформы, и, следовательно, их попадание в обратном ходе в фотоэлектрический автоколлиматор 1.
Формирование изображения тест-объекта в плоскости приемника фотоэлектрического автоколлиматора 1, отраженного от базового отражателя 7, обеспечивается прохождением светового потока от фотоэлектрического автоколлиматора 1 через светоделительную пластину 3 первого зеркального ромба 2, котировочные клинья 5, второй зеркальный ромб 6. Далее, после отражения от базового отражателя 7, световой поток проходит в обратном ходе через перечисленные компоненты и попадает в фотоэлектрический автоколлиматор 1, формирующий в плоскости приемника изображение тест-объекта. Базовый отражатель 7, в зависимости от задач при использовании оптической системы, может быть выполнен в виде плоского зеркала, зеркального отражателя, состоящего из уголковых отражателей, соединенных методом глубокого оптического контакта или с использованием клея, а также иметь другую конструкцию, например, изображенную на фиг. 2 и состоящую из зеркальных уголковых отражателей и приклеенного к нему зеркала.
В плоскости приемника фотоэлектрического автоколлиматора 1 одновременно формируются два изображения тест-объекта:
- от зеркальной поверхности призменного блока 8 и базового отражателя 7, при измерении горизонтального угла между нормалями к зеркальной поверхности призменного блока 8 и базовому отражателю 7;
- от зеркальной поверхности призменного блока 9 и базового отражателя 7, при измерении горизонтального угла между нормалями к зеркальной поверхности призменного блока 9 и базовому отражателю 7;
- от зеркальных поверхностей призменных блоков 8 и 9, при измерении горизонтального угла между нормалями к зеркальным поверхностям призменных блоков 8 и 9.
При этом с помощью непрозрачных экранов обеспечивается отсутствие попадания светового потока на соответствующий призменный блок или базовый отражатель, не участвующий в конкретном измерительном процессе.
Угол между нормалями к зеркальной поверхности призменного блока 8 или 9 и базовому отражателю 7 в горизонтальной плоскости определяется по формуле:

где аБ - координата на приемнике фотоэлектрического автоколлиматора 1 изображения тест-объекта от базового отражателя в горизонтальной плоскости, в пикселях;
а6(7) - координата на приемнике фотоэлектрического автоколлиматора 1 изображения тест-объекта от зеркальной поверхности призменного блока 8 или 9 в горизонтальной плоскости, в пикселях;
аЦ - цена деления в угловой мере перед автоколлиматором, соответствующая 1 пикселю;
ΔαБ - угол отклонения в горизонтальной плоскости оптической системы, находящейся между фотоэлектрическим автоколлиматором 1 и базовым отражателем 7, при падении лучей после второго зеркального ромба 6 по нормали к базовому отражателю 7;
Δα6(7) - угол отклонения от угла 90° в горизонтальной плоскости оптической системы, расположенной между фотоэлектрическим автоколлиматором 1 и зеркальной поверхностью призменных блоков 8 или 9, при падении лучей после клинового компенсатора 12 или 13, находящегося в нулевом положении, по нормали к зеркальной поверхности призменных блоков 8 или 9, находящегося в нулевом положении.
Угол между нормалями к зеркальным поверхностям призменных блоков 8 и 9 в горизонтальной плоскости определяется по формуле:

При этом фактические значения углов ΔαБ, Δα6, Δα7, заранее измеренные с высокой точностью, остаются неизменными при вращении платформы с призменными блоками 8, 9 и клиньев клиновых компенсаторов 12, 13 во всем диапазоне углов поворота, а знаки «±» определяются правилом знаков в выбранной для проверяемого изделия системе координат, а также положением на приемнике фотоэлектрического автоколлиматора 1 изображения тест-объекта от базового отражателя 7 относительно изображения от зеркальной поверхности призменного блока или другого зеркального элемента 8 или 9, выставленного с помощью котировочных клиньев 5 при юстировке оптической системы.
При проверке погрешности измерения горизонтального угла одним или двумя приборами 14, 15, соединенными согласующим устройством 16, установленными на одной платформе с призменными блоками 8, 9 и имеющими выход на базовый отражатель 7 и элемент соответствующего призменного блока 8 или 9, например уголковый отражатель, нормаль к ребру которого в горизонтальной плоскости параллельна зеркальной поверхности призменного блока 8 или 9, а ребро и биссектриса уголкового отражателя параллельны горизонтальной плоскости при нулевом положении платформы, горизонтальный угол между нормалями к базовому отражателю 5 и уголковому отражателю призменных блоков 8 или 9 определяется по формуле:

где α4 - горизонтальный угол между нормалями к зеркальной поверхности призменного блока 8 или 9 и к ребру уголкового отражателя, измеренный заранее с высокой точностью в плоскости, параллельной ребру и биссектрисе уголкового отражателя.
Формулы (1), (2), (3) справедливы при условии изготовления клиньев каждой пары с разностью углов отклонения в главных сечениях не более (1-2) с, применения высокоточных поворотных платформ для вращения каждого клина пары, точной выставки плоскости главного сечения пары клиньев, находящихся в нулевом положении, параллельно горизонтальной плоскости. В противном случае, в формулы (1), (2), (3) должна быть введена поправка, учитывающая боковой увод светового потока в горизонтальной плоскости, измеренный ранее при заданных углах поворота клиньев.
Таким образом, предлагаемое изобретение позволяет измерять углы в горизонтальной плоскости между нормалями к зеркальным поверхностям одного или двух призменных блоков или других зеркальных элементов, установленных на одной платформе, и нормалью к базовому отражателю, расположенных в перпендикулярных плоскостях, на значительном расстоянии друг от друга и на разных уровнях, при нулевом положении платформы и углах поворота ее вокруг двух взаимоперпендикулярных осей, параллельных горизонтальной плоскости, причем одна ось параллельна зеркальной поверхности призменного блока или другого зеркального элемента. При этом базовый отражатель остается неподвижным, а измерение проводится с использованием одного фотоэлектрического автоколлиматора. Призменные блоки с зеркальными поверхностями или другие зеркальные элементы могут быть установлены на различных объектах. Изобретение может быть использовано при конструировании оптических систем стендов, предназначенных для проверки погрешности измерения горизонтальных углов одним или двумя приборами, соединенными согласующим устройством, имеющими каналы выхода на элементы призменного блока и базовый отражатель и установленными на одной платформе с призменными блоками, которая может поворачиваться вокруг двух взаимоперпендикулярных осей, параллельных горизонтальной плоскости, причем одна ось параллельна зеркальной поверхности призменного блока. В этом случае оптическая система используется для определения внешнего угла между нормалями к базовому отражателю и элементам призменного блока в горизонтальной плоскости, при заданных углах поворота платформы, с последующим сравнением с аналогичным углом, измеренным прибором.
Расположение пентагональных отражателей на разных уровнях в вертикальном направлении относительно оси автоколлиматора, применение зеркальных ромбов, один из которых имеет светоделитель, и клиновых компенсаторов позволяет с помощью одного фотоэлектрического автоколлиматора проводить с высокой точностью измерение углов в горизонтальной плоскости между нормалями к неподвижному базовому отражателю и к зеркальной поверхности каждого призменного блока или другого зеркального элемента при его нулевом положении и углах поворота вокруг двух взаимоперпендикулярных осей, параллельных горизонтальной плоскости, одна из которых параллельна зеркальной поверхности призменного блока или другого зеркального элемента. Кроме того, базовый отражатель и зеркальные поверхности призменных блоков или других зеркальных элементов расположены в перпендикулярных плоскостях, на значительном расстоянии друг от друга и на разных уровнях. При этом углы отклонения оптических систем в горизонтальной плоскости, находящихся между автоколлиматором и зеркальной поверхностью каждого призменного блока или другого зеркального элемента при нулевом положении клинового компенсатора, а также фотоэлектрическим автоколлиматором и базовым отражателем, измеренные с высокой точностью, остаются неизменными и используются в формулах для расчета горизонтальных углов между нормалями к зеркальным поверхностям призменных блоков или других зеркальных элементов и базовому отражателю. Совокупность приведенных признаков позволяет достичь технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДВУГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523736C1 |
| Способ измерения углов между двумя отражающими поверхностями | 1987 |
|
SU1515038A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ОПТИЧЕСКОЙ ГОЛОВКИ ЛАЗЕРНОГО ПРОИГРЫВАТЕЛЯ | 1992 |
|
RU2071612C1 |
| УСТРОЙСТВО ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2001 |
|
RU2182311C1 |
| Устройство автоматической юстировки двухзеркальной телескопической системы с заданным направлением выходного излучения относительно направления визирования | 2023 |
|
RU2820599C1 |
| УСТРОЙСТВО ДЛЯ ЗАДАНИЯ ПЛОСКОСТИ ГОРИЗОНТА | 1995 |
|
RU2097698C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ЮСТИРОВКИ ДВУХЗЕРКАЛЬНОЙ ТЕЛЕСКОПИЧЕСКОЙ СИСТЕМЫ С ЗАДАННЫМ НАПРАВЛЕНИЕМ ВЫХОДНОГО ИЗЛУЧЕНИЯ | 2015 |
|
RU2611604C1 |
Изобретение относится к оптическому стенду измерения горизонтального угла. Система содержит автоколлиматор, оптически связанный с базовым отражателем, и контролируемые элементы с зеркальными поверхностями, которые оптически связаны с пентагональными отражателями. Контролируемые элементы установлены на одной платформе и расположены на разных по вертикали уровнях относительно неподвижного базового отражателя, на значительном расстоянии друг от друга. Автоколлиматор оптически связан с контролируемыми элементами при помощи пентагональных отражателей. Перед зеркальными поверхностями контролируемых элементов установлены клиновые компенсаторы. Технический результат - обеспечение возможности измерения с высокой точностью углов между контролируемыми элементами, установленными на значительном расстоянии друг от друга на одной платформе, имеющей возможность наклонов в двух взаимоперпендикулярных плоскостях, и неподвижным отражателем. 3 ил.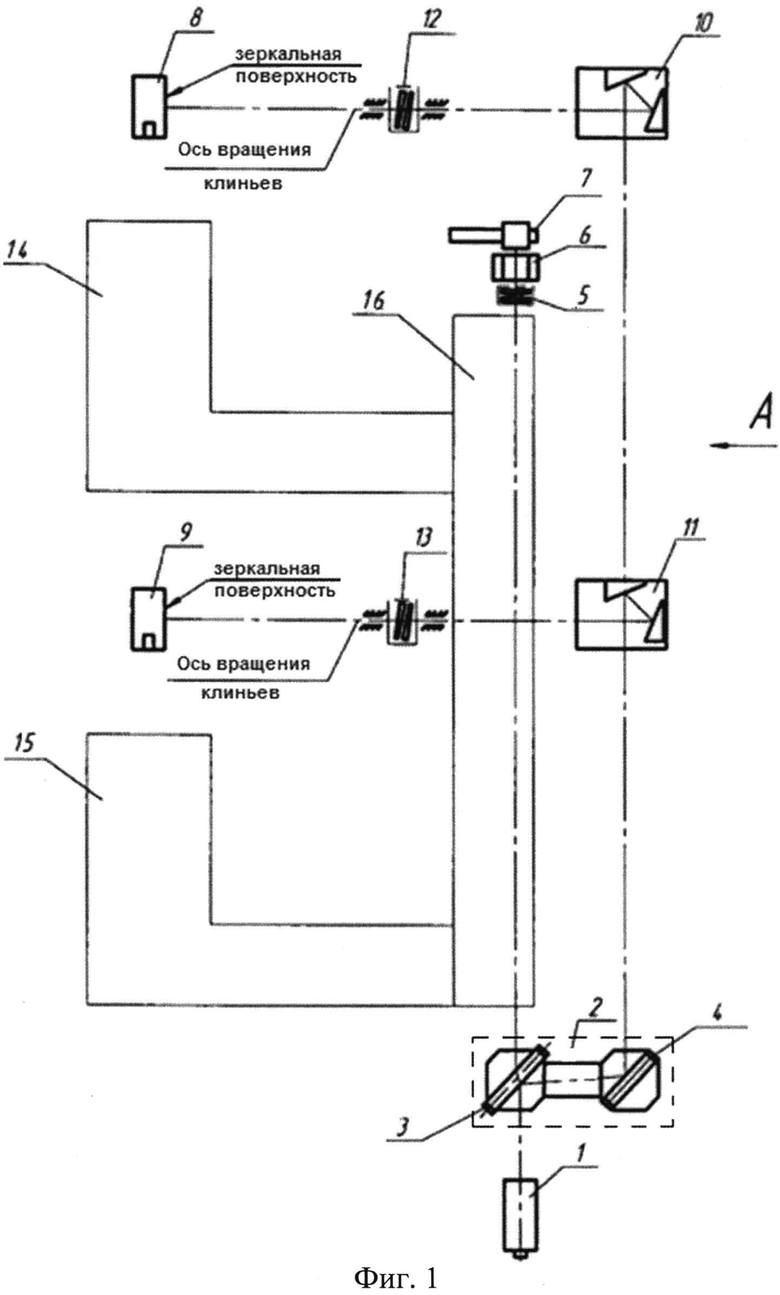
Оптическая система стенда для измерения горизонтального угла, содержащая автоколлиматор, оптически связанный с базовым отражателем, и контролируемые элементы с зеркальными поверхностями, которые оптически связаны с пентагональными отражателями, причем контролируемые элементы с зеркальными поверхностями установлены на одной платформе и расположены в перпендикулярных плоскостях и на разных уровнях относительно неподвижного базового отражателя, на значительном расстоянии друг от друга, отличающаяся тем, что между автоколлиматором и базовым отражателем введен первый зеркальный ромб со светоделителем, обеспечивающий в проходящем свете попадание светового потока через второй зеркальный ромб на базовый отражатель, а в отраженном свете оптически связывающий автоколлиматор и пентагональные отражатели, причем пентагональные отражатели смещены в вертикальном направлении относительно оси автоколлиматора, перед зеркальными поверхностями контролируемых элементов установлены клиновые компенсаторы, платформа с контролируемыми элементами выполнена с возможностью поворотов вокруг двух взаимоперпендикулярных осей, параллельных горизонтальной плоскости, причем одна из осей параллельна зеркальным поверхностям контролируемых элементов, а автоколлиматор выполнен фотоэлектрическим.
| Кабельный кран, предназначенный для обслуживания некоторой площади | 1932 |
|
SU39946A1 |
| Стенд для контроля углов установки управляемых колес транспортного средства | 1986 |
|
SU1352195A1 |
| JP 2010197143 A 09.09.2010 | |||
| JPH 09229650 A 05.09.1997 | |||

