Изобретение относится к авиационной технике, а именно к взлетно-посадочным убираемым устройствам самолета для уборки-выпуска передней и основной опор шасси.
Известно устройство привода уборки-выпуска переднего шасси самолета (заявка US №2009/0250552 от 02.04.2009), имеющее электрический линейный привод, конец выдвижного звена которого соединен шарниром, расположенным на рычаге стойки выше установленной в отсеке шасси оси ее поворота, а конец корпуса шарнирно закреплен на оси, установленной в отсеке шасси.
Недостаток устройства в том, что оно не имеет аварийного привода уборки-выпуска шасси, а второй привод предусмотрен только для средств стопорения.
Известно устройство уборки-выпуска переднего шасси самолета (заявка FR №2931798 от 29.05.2008), имеющее стойку с колесом и привод от электрического или гидравлического цилиндра, конец корпуса которого соединен шарниром, расположенным на рычаге выше первой оси поворота стойки, а конец выдвижного штока соединен шарниром с тем звеном коленного механизма упора стойки, конец которого шарнирно закреплен на второй оси, установленной в отсеке шасси.
Недостаток устройства в том, что оно не имеет аварийного привода уборки-выпуска шасси.
Известно устройство уборки-выпуска шасси самолета с электромеханическим линейным приводом (заявки US №2011/0042511 А1 от 19.08.2010, US №2010/0012779 А1 от 16.07.2008, WO №2010/009289 от 16.07.2008), включающее стойку с колесами, установленную на оси, расположенной в главном кронштейне, закрепленном на стенке фюзеляжа в нише шасси, и рычаг стойки, жестко закрепленный на верхнем конце стойки. Устройство включает два электромеханических линейных привода в едином корпусе, два выдвижных звена, одно из которых шарнирно соединено с рычагом стойки, а другое - с кронштейном привода, закрепленным в нише шасси.
Недостаток известного устройства в сложной конструкции, обусловленной тем, что в нем используется два расположенных последовательно линейных электровинтовых привода, механизма преобразования вращательного движения в поступательное, приводимых установленными на корпусе электродвигателем главного привода и электродвигателем аварийного привода, а также в недостаточной надежности вследствие возможности заклинивания обоих приводов и невозможности освобождения шасси для его выпуска при заклинивании обоих приводов.
Способ работы известного устройства при уборке и выпуске шасси включает следующие этапы: включение главного электродвигателя и вращение главного винта; осевое перемещение выдвижного звена относительно корпуса; включение аварийного электродвигателя и вращение аварийного винта в случае аварийного состояния главного двигателя; осевое перемещение аварийного выдвижного звена относительно корпуса.
Недостаток способа в том, что в случае одновременного отказа главного и аварийного приводов стойки в полете при снижении самолета для посадки, шасси не может быстро выпуститься под действием собственного веса, что существенно снижает надежность работы привода стойки.
Техническая задача изобретения - упрощение конструкции и повышение надежности работы устройства.
Техническая задача решена в устройстве привода уборки-выпуска шасси, включающем стойку с колесами, установленную с возможностью поворота на оси стойки, расположенной в главном кронштейне, закрепленном в нише шасси, и рычаг стойки, жестко закрепленный на верхнем конце стойки,
имеющем,
- по меньшей мере, один электромеханический линейный привод поворота стойки относительно оси; корпус электромеханического линейного привода и соединение корпуса с кронштейном привода, закрепленным в нише шасси, образующее вращательную пару,
- расположенные в корпусе электромеханического линейного привода электродвигатель, винтовой механизм, преобразующий вращательное движение вала электродвигателя в поступательное движение выдвижного звена, взаимодействующего с рычагом стойки,
- датчик и стопор выпущенного положения шасси;
- датчик и стопор убранного положения шасси;
при этом
- выдвижное звено образует с рычагом стойки контактную пару с размыкаемой областью контакта, а электромеханический линейный привод имеет механизм направления выдвижного звена на рычаг стойки, обеспечивающий сохранение контакта при повороте корпуса электромеханического линейного привода в процессе уборки или выпуска шасси, при этом механизм направления образует с рычагом стойки, по меньшей мере, одну одноподвижную вращательную кинематическую пару.
Возможны различные варианты исполнения механизма направления выдвижного звена на рычаг стойки. Предпочтительной является конструкция, в которой механизм направления выдвижного звена на рычаг стойки включает, по меньшей мере, один шток, соединение конца которого с рычагом стойки образует одноподвижную вращательную кинематическую пару, ось которой перпендикулярна оси выдвижного звена и оси стойки; соединение штока с корпусом электромеханического линейного привода в виде одноподвижной поступательной кинематической пары.
Для уменьшения габаритов электромеханического линейного привода одноподвижная поступательная кинематическая пара может быть образована соосно расположенными выдвижным звеном с центральным отверстием и штоком, размещенным подвижно в центральном отверстии. Для повышения надежности работы устройства путем резервирования оно может иметь два электромеханических линейных привода, при этом соединения концов каждого штока с рычагом, образующие одноподвижную вращательную кинематическую пару, расположены на одной оси.
Механизм направления может иметь одну одноподвижную поступательную кинематическую пару, образованную корпусом, имеющим на внешней поверхности выступ с отверстием, ось которого параллельна оси выдвижного звена, расположена в плоскости, проходящей через ось выдвижного звена и ось одноподвижной вращательной кинематической пары, и подвижно расположенным в отверстии штоком. Если устройство имеет два электромеханических линейных привода, то соединения концов каждого штока с рычагом, образующие одноподвижные вращательные кинематические пары, расположены на одной оси.
Устройство может иметь вторую одноподвижную поступательную кинематическую пару, расположенную симметрично относительно имеющейся одноподвижной поступательной кинематической пары и в той же плоскости, при этом одноподвижные вращательные кинематические пары, образованные соединениями концов каждого штока с рычагом, расположены на одной оси.
Если устройство имеет два электромеханических линейных привода, то их корпуса могут быть соединены перемычкой с отверстием, ось которого параллельна осям выдвижных звеньев и расположена в плоскости, проходящей через оси выдвижных звеньев, при этом одноподвижная поступательная кинематическая пара механизма направления образована перемычкой с отверстием и подвижно расположенным в отверстии штоком.
Механизм направления может иметь одно соединение с электромеханическим линейным приводом в виде одноподвижной поступательной кинематической пары, образованной втулкой, установленной подвижно на корпусе электромеханического линейного привода, и штоком, закрепленным на втулке так, что ось штока расположена в плоскости, проходящей через ось выдвижного звена и ось одноподвижной вращательной кинематической пары. Устройство с таким механизмом направления может иметь два электромеханических линейных привода, при этом соединения концов каждого штока с рычагом, образующие одноподвижные вращательные кинематические пары, расположены на одной оси.
Если устройство имеет два электромеханических линейных привода, на корпусах которых установлены втулки с возможностью поступательного движения и соединенные перемычкой, то один шток закреплен на перемычке так, что его ось расположена в плоскости, проходящей через оси выдвижных звеньев электромеханических линейных приводов.
Механизм направления может иметь два штока, соединения концов которых с рычагом стойки в виде одноподвижной вращательной кинематической пары расположены на одной оси, при этом соединения штоков с электромеханическим линейным приводом в виде одноподвижной поступательной кинематической пары образованы втулкой, установленной подвижно на корпусе электромеханического линейного привода, и штоками, закрепленными на втулке так, что оси штоков расположены в плоскости, проходящей через ось выдвижного звена и ось одноподвижной вращательной кинематической пары.
Для увеличения силы, действующей на рычаг при выпуске шасси, электромеханический линейный привод может иметь одно- или двухступенчатый редуктор, установленный между электродвигателем и винтовым механизмом. Для уменьшения габаритов электромеханический линейный привод имеет двухступенчатый волновой редуктор с телами вращения и штоком, размещенным подвижно в центральном отверстии.
Также для уменьшения габаритов частота вращения ротора электродвигателя электромеханического линейного привода с одноступенчатым или двухступенчатым волновым редуктором находится в интервале 5000…20000 мин-1.
Технический эффект - упрощение конструкции и повышение надежности работы устройства - достигается за счет совокупности новых признаков устройства:
- выдвижное звено образует с рычагом стойки контактную пару с размыкаемой областью контакта, а электромеханический линейный привод имеет механизм направления выдвижного звена на рычаг стойки, обеспечивающий сохранение контакта при повороте корпуса электромеханического линейного привода в процессе уборки или выпуска шасси, при этом механизм направления образует с рычагом стойки, по меньшей мере, одну одноподвижную вращательную кинематическую пару.
Возможны различные варианты исполнения механизма направления выдвижного звена на рычаг стойки. Предпочтительной является конструкция, в которой механизм направления выдвижного звена на рычаг стойки включает, по меньшей мере, один шток, соединение конца которого с рычагом стойки образует одноподвижную вращательную кинематическую пару, ось которой перпендикулярна оси выдвижного звена и оси стойки; соединение штока с корпусом электромеханического линейного привода в виде одноподвижной поступательной кинематической пары.
Для уменьшения габаритов электромеханического линейного привода одноподвижная поступательная кинематическая пара может быть образована соосно расположенными выдвижным звеном с центральным отверстием и штоком, размещенным подвижно в центральном отверстии. Для повышения надежности работы устройства путем резервирования оно может иметь два электромеханических линейных привода, при этом соединения концов каждого штока с рычагом, образующие одноподвижную вращательную кинематическую пару, расположены на одной оси.
Механизм направления может иметь одну одноподвижную поступательную кинематическую пару, образованную корпусом, имеющим на внешней поверхности выступ с отверстием, ось которого параллельна оси выдвижного звена, расположена в плоскости, проходящей через ось выдвижного звена и ось одноподвижной вращательной кинематической пары, и подвижно расположенным в отверстии штоком. Если устройство имеет два электромеханических линейных привода, то соединения концов каждого штока с рычагом, образующие одноподвижную вращательную кинематическую пару, расположены на одной оси.
Устройство может иметь вторую одноподвижную поступательную кинематическую пару, расположенную симметрично относительно имеющейся одноподвижной поступательной кинематической пары и в той же плоскости, при этом одноподвижные вращательные кинематические пары, образованные соединениями концов каждого штока с рычагом, расположены на одной оси.
Если устройство имеет два электромеханических линейных привода, то их корпуса могут быть соединены перемычкой с отверстием, ось которого параллельна осям выдвижных звеньев и расположена в плоскости, проходящей через оси выдвижных звеньев, при этом одноподвижная поступательная кинематическая пара механизма направления образована перемычкой с отверстием и подвижно расположенным в отверстии штоком.
Механизм направления может иметь одно соединение с электромеханическим линейным приводом в виде одноподвижной поступательной кинематической пары, образованной втулкой, установленной подвижно на корпусе электромеханического линейного привода, и штоком, закрепленным на втулке так, что ось штока расположена в плоскости, проходящей через ось выдвижного звена и ось одноподвижной вращательной кинематической пары. Устройство с таким механизмом направления может иметь два электромеханических линейных привода, при этом соединения концов каждого штока с рычагом, образующие одноподвижную вращательную кинематическую пару, расположены на одной оси.
Если устройство имеет два электромеханических линейных привода, на корпусах которых установлены втулки с возможностью поступательного движения и соединенные перемычкой, то один шток закреплен на перемычке так, что его ось расположена в плоскости, проходящей через оси выдвижных звеньев электромеханических линейных приводов.
Механизм направления может иметь два штока, соединения концов которых с рычагом стойки в виде одноподвижной вращательной кинематической пары расположены на одной оси, при этом соединения штоков с электромеханическим линейным приводом в виде одноподвижной поступательной кинематической пары образованы втулкой, установленной подвижно на корпусе электромеханического линейного привода, и штоками, закрепленными на втулке так, что оси штоков расположены в плоскости, проходящей через ось выдвижного звена и ось одноподвижной вращательной кинематической пары.
Для увеличения силы, действующей на рычаг при выпуске шасси, электромеханический линейный привод может иметь одно- или двухступенчатый редуктор, установленный между электродвигателем и винтовым механизмом. Для уменьшения габаритов электромеханический линейный привод имеет двухступенчатый волновой редуктор с телами вращения и штоком, размещенным подвижно в центральном отверстии. Также для уменьшения габаритов частота вращения ротора электродвигателя электромеханического линейного привода с одноступенчатым или двухступенчатым волновым редуктором находится в интервале 5000…20000 мин-1.
Отличительные признаки или признаки, им эквивалентные, не обнаружены в научно-технической и патентной информации, что свидетельствует о соответствии изобретения критерию «новизна».
Совокупность отличительных признаков не следует явно из уровня техники, поэтому изобретение соответствует критерию «изобретательский уровень».
На фиг.1 показано устройство привода уборки-выпуска шасси самолета с одним электромеханическим линейным приводом при выпущенном положении шасси со штоком внутри выдвижного звена.
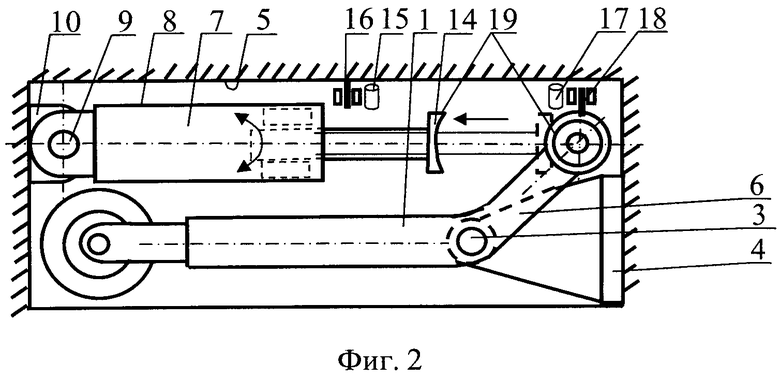
На фиг.2 показано устройство привода уборки-выпуска шасси самолета в убранном положении шасси.
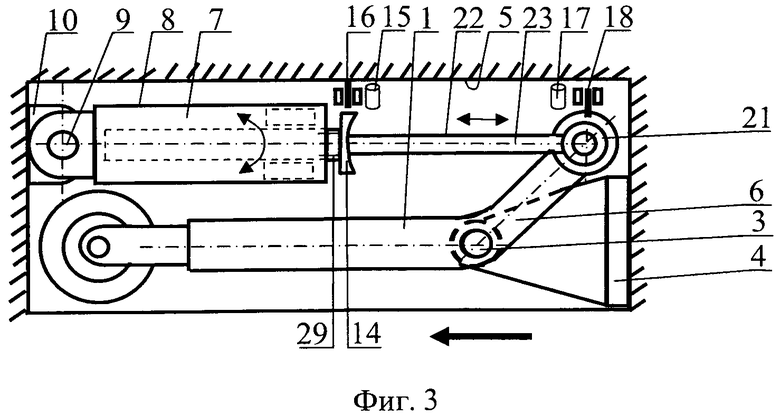
На фиг.3 показано устройство привода уборки-выпуска шасси самолета в убранном положении шасси и втянутом выдвижном звене.
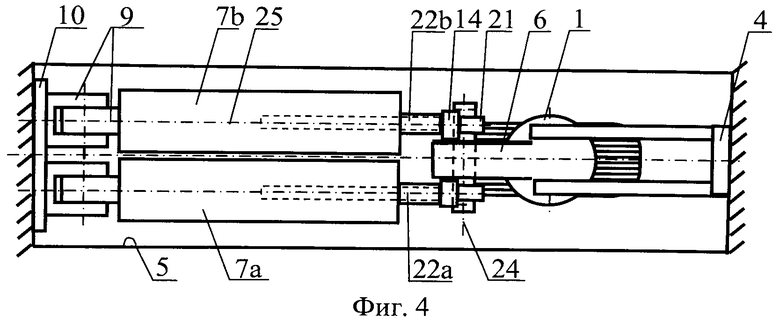
На фиг.4 показано устройство привода уборки-выпуска шасси самолета с двумя электромеханическими линейными приводами со штоками внутри выдвижных звеньев.
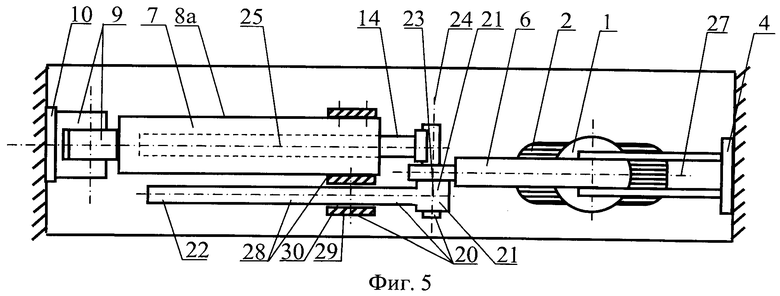
На фиг.5 показано устройство с электромеханическим линейным приводом с закрепленной на корпусе втулкой с отверстием и штоком, подвижным в отверстии.
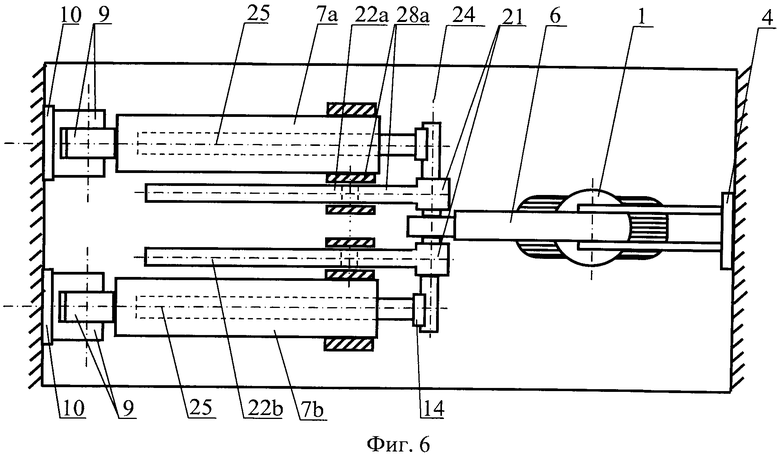
На фиг.6 показано устройство с двумя электромеханическими линейными приводами с закрепленными на корпусах втулками, каждая с отверстием и штоком, подвижным в отверстии.
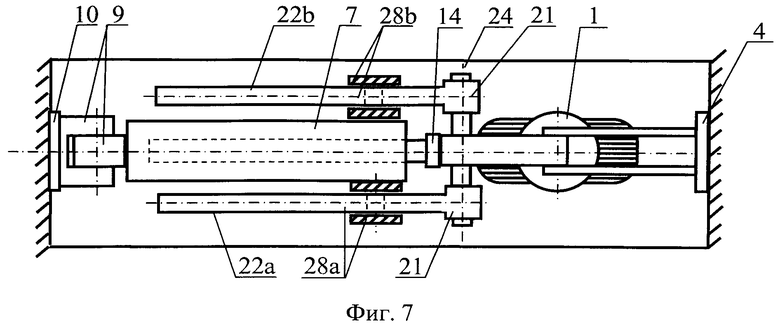
На фиг.7 показано устройство с электромеханическим линейным приводом с закрепленной на корпусе втулкой с двумя отверстиями и штоками, подвижными в отверстиях.
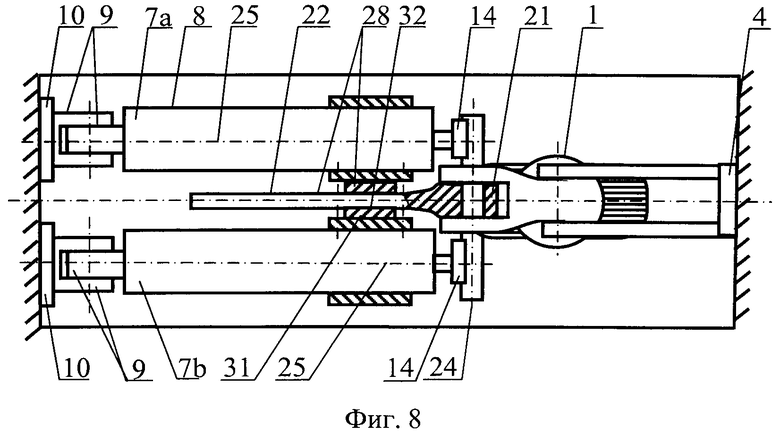
На фиг.8 показано устройство с электромеханическим линейным приводом с соединяющей корпусы перемычкой с отверстием и штоком, установленным подвижно в отверстии.
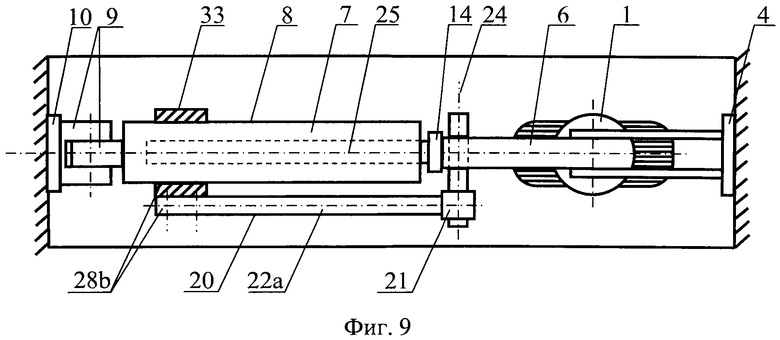
На фиг.9 показано устройство привода уборки-выпуска шасси самолета со втулкой, подвижной на корпусе электромеханического линейного привода, и штоком, закрепленным на подвижной втулке.
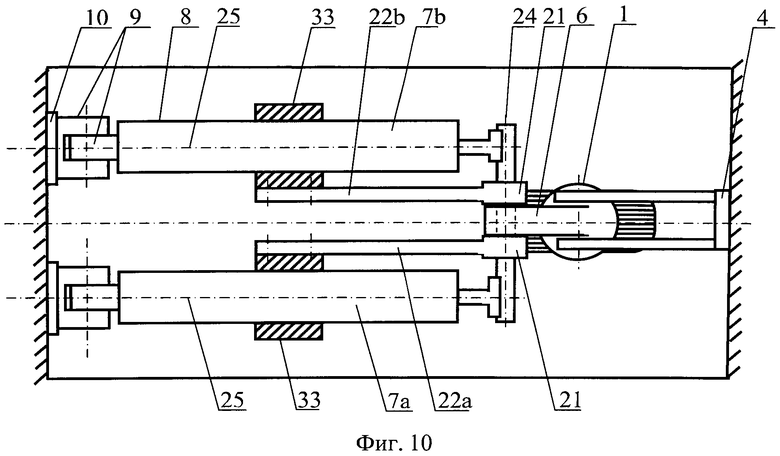
На фиг.10 показано устройство с двумя электромеханическими линейными приводами и втулками, установленными подвижно на корпусах, с закрепленными на них штоками.
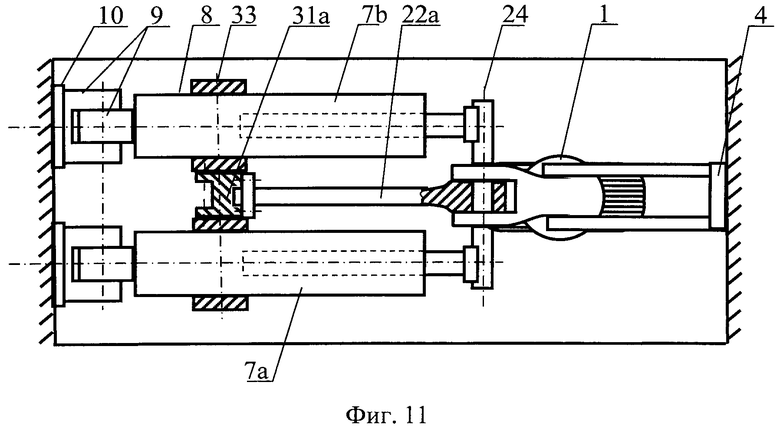
На фиг.11 показано устройство с двумя электромеханическими линейными приводами и втулками, установленными подвижно на корпусах, соединенными между собой перемычкой и с закрепленным на перемычке штоком.
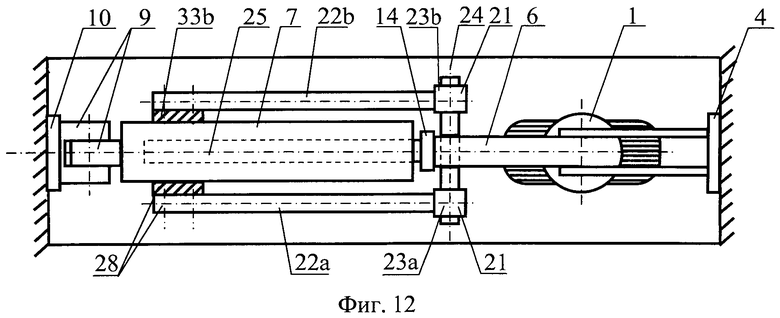
На фиг.12 показано устройство привода уборки-выпуска шасси самолета со втулкой, подвижной на корпусе электромеханического линейного привода, и двумя штоками, закрепленными на подвижной втулке.
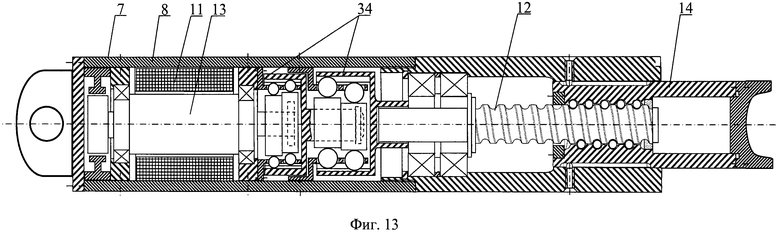
На фиг.13 показана конструкция электромеханического линейного привода, имеющего двухступенчатый волновой редуктор с промежуточными телами вращения.
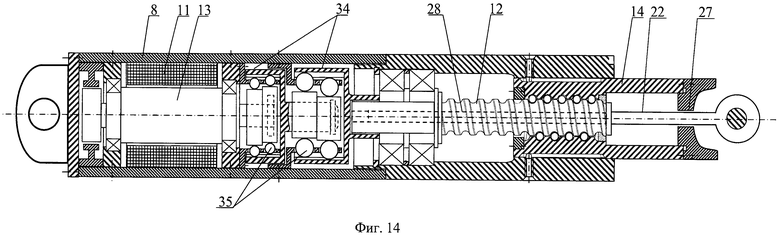
На фиг.14 показана конструкция электромеханического линейного привода, имеющего двухступенчатый редуктор с промежуточными телами вращения и шток, расположенный внутри выдвижного звена.
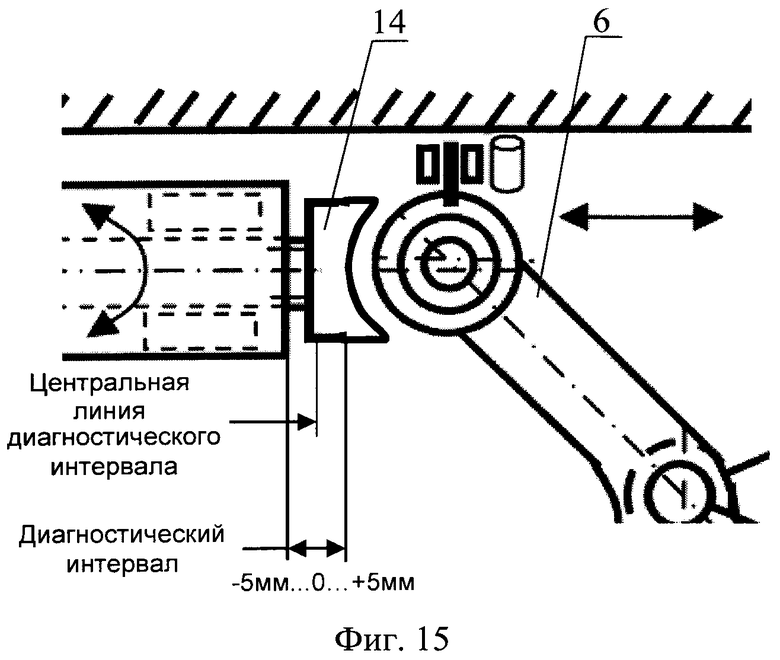
На фиг.15 показана схема работы устройства при диагностике его работоспособности перед уборкой шасси.
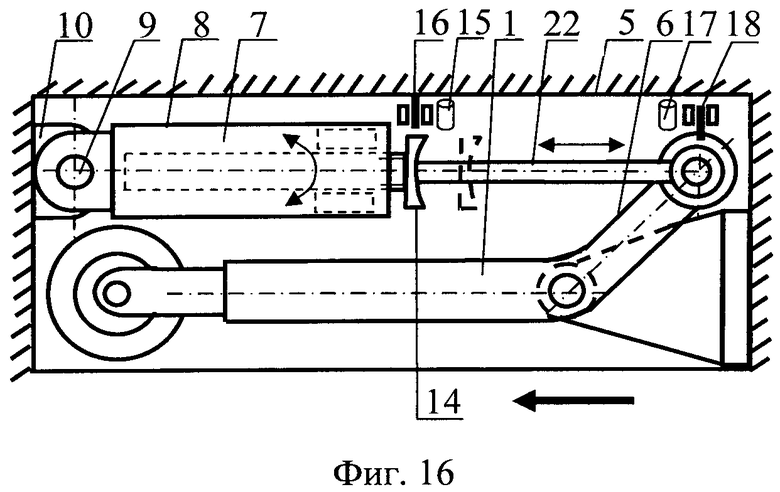
На фиг.16 показана схема работы устройства при диагностике его работоспособности перед выпуском шасси.
Устройство привода уборки-выпуска шасси самолета (фиг.1-16), включающее стойку 1 с колесами 2, установленную с возможностью поворота на оси 3 стойки 1, расположенной в главном кронштейне 4, закрепленном в нише 5 шасси, и рычаг 6 стойки 1, жестко закрепленный на верхнем конце стойки 1,
имеет, по меньшей мере, один электромеханический линейный привод 7 поворота стойки относительно оси 3; корпус 8 электромеханического линейного привода 7 и образующее вращательную пару соединение 9 корпуса 8 с кронштейном 10 привода, закрепленным в нише 5 шасси,
- расположенные в корпусе 8 (фиг.13, 14) электродвигатель 11, винтовой механизм 12, преобразующий вращательное движение ротора 13 вала электродвигателя 11 в поступательное движение выдвижного звена 14, взаимодействующего с рычагом 6 стойки 1 (фиг.1),
- датчик 15 и стопор 16 выпущенного положения шасси (фиг.1-3);
- датчик 17 и стопор 18 убранного положения шасси (фиг.2, 3);
при этом
- выдвижное звено 14 образует с рычагом 6 стойки 1 размыкаемую контактную пару 19 (фиг.2), а электромеханический линейный привод 7 имеет механизм 20 (фиг.5) направления выдвижного звена 14 на рычаг 6 стойки 1, обеспечивающий сохранение контакта пары 19 при повороте корпуса 8 в кронштейне 10 в процессе уборки или выпуска шасси, при этом механизм 20 направления образует с рычагом 6 стойки 1, по меньшей мере, одну одноподвижную вращательную кинематическую пару 21.
Возможны различные варианты исполнения механизма 20 направления выдвижного звена 14 на рычаг 6 стойки 1. Предпочтительной является конструкция (фиг.2, 3, 4, 14), в которой механизм 20 направления выдвижного звена 14 на рычаг 6 стойки 1 включает, по меньшей мере, один шток 22, соединение конца 23 которого с рычагом 6 стойки 1 образует одноподвижную вращательную кинематическую пару 21, ось 24 которой перпендикулярна оси 25 выдвижного звена 14; соединение штока 22 с корпусом 8 в виде одноподвижной поступательной кинематической пары 26.
Для уменьшения габаритов электромеханического линейного привода 7 одноподвижная поступательная кинематическая пара 26 может быть образована соосно расположенными выдвижным звеном 14 с центральным отверстием 27, винтом 12 с отверстием 28 и штоком 22 (фиг.3, 14), размещенным подвижно в центральных отверстиях 27 и 28. Для повышения надежности работы устройства путем резервирования оно может иметь два электромеханических линейных привода 7а и 7b (фиг.4), при этом соединения концов штоков 22а и 22b с рычагом 6, образующие одноподвижные вращательные кинематические пары 21, расположены на одной оси 25а.
Механизм направления может иметь одну одноподвижную поступательную кинематическую пару 26 (фиг.5), образованную корпусом 8а, имеющим на внешней поверхности выступ 29 с отверстием 30, ось которого параллельна оси 25 выдвижного звена 14, расположена в плоскости, проходящей через ось 25 и ось 24 одноподвижной вращательной кинематической пары 21, и подвижно расположенным в отверстии 30 штоком 22. Если устройство имеет два электромеханических линейных привода 7а и 7b (фиг.6), то соединения концов штоков 22а и 22b с рычагом 6, образующие одноподвижные вращательные кинематические пары 21, расположены на одной оси 25а.
Устройство может иметь вторую одноподвижную поступательную кинематическую пару 26b (фиг.7), расположенную симметрично относительно имеющейся одноподвижной поступательной кинематической пары 26а и с осью 25 в той же плоскости, при этом одноподвижные вращательные кинематические пары 21 расположены на одной оси 24.
Если устройство имеет два электромеханических линейных привода 7 (фиг.8), то их корпуса 8 могут быть соединены перемычкой 31 с отверстием 32, ось которого параллельна осям выдвижных звеньев 14 и расположена в плоскости, проходящей через оси 25 выдвижных звеньев 14, при этом одноподвижная поступательная кинематическая пара 26 механизма направления образована перемычкой 31 с отверстием 32 и подвижно расположенным в отверстии 32 штоком 22.
Механизм направления 14 может иметь одно соединение с электромеханическим линейным приводом 7 в виде одноподвижной поступательной кинематической пары 26b (фиг.9), образованной втулкой 33, установленной подвижно на корпусе 8, и штоком 22а, закрепленным на втулке 33 так, что ось штока 22а расположена в плоскости, проходящей через ось 25 выдвижного звена 14 и ось 24 одноподвижной вращательной кинематической пары 21. Устройство с таким механизмом 20 направления может иметь два электромеханических линейных привода 7 (фиг.10), при этом соединения концов 23 штоков 22а и 22b с рычагом 6, образующие одноподвижную вращательную кинематическую пару 21, расположены на одной оси 24.
Если устройство имеет два электромеханических линейных привода 7 (фиг.11), на корпусах 8 которых установлены втулки 33 с возможностью поступательного движения и соединенные перемычкой 31а, то один шток 22b закреплен на перемычке 31а так, что его ось расположена в плоскости, проходящей через оси 25 выдвижных звеньев 14 электромеханических линейных приводов 7.
Механизм 20 направления может иметь два штока 22а и 22b (фиг.12), соединения концов 23а и 23b которых с рычагом 6 стойки 1 в виде одноподвижных вращательных кинематических пар 21 расположены на одной оси 24, при этом соединения штоков с электромеханическим линейным приводом 7 в виде одноподвижной поступательной кинематической пары 26 образованы втулкой 33b, установленной подвижно на корпусе 8, и штоками 22b, закрепленными на втулке 33b так, что оси штоков 22а и 22b расположены в плоскости, проходящей через ось 25 выдвижного звена 14 и ось 24 одноподвижной вращательной кинематической пары 21.
Для увеличения силы, действующей на рычаг 6 при выпуске шасси, электромеханический линейный привод 7 может иметь одноступенчатый (не показан) или двухступенчатый редуктор 34, установленный между электродвигателем 11 и винтовым механизмом 12 (фиг.13, 14). Для уменьшения габаритов электромеханический линейный привод 7 имеет двухступенчатый волновой редуктор 34 с телами вращения 35 (фиг.14). Также для уменьшения габаритов частота вращения ротора 13 электродвигателя 11 электромеханического линейного привода с одноступенчатым или двухступенчатым волновым редуктором находится в интервале 5000…20000 мин-1.
Способ работы устройства привода уборки-выпуска шасси самолета, описанного в п.1, в соответствии с изобретением, включает
- снятие шасси со стопора 16 (фиг.1) после взлета самолета,
- включение электродвигателя 11 электромеханического линейного привода 7, вращение валов редуктора 34 (фиг.13, 14), винта винтового механизма 12 и перемещение выдвижного звена 14,
- поворот стойки 1 относительно ее оси 3 и уборка шасси в процессе перемещения и действия выдвижного звена 14 на рычаг 6 стойки 1,
- стопорение шасси стопором 18 (фиг.2, 3) убранного положения шасси относительно ниши 5 на все время полета,
- снятие шасси со стопора 18 для выпуска шасси в процессе снижения для посадки самолета; включение электродвигателя 11 электромеханического линейного привода 7, вращение валов редуктора 34 (фиг.13, 14), винта винтового механизма 12 и перемещение выдвижного звена 14;
- вращение стойки 1 под действием силы тяжести при выпуске шасси и стабилизация скорости поворота стойки 1 относительно оси 3 с помощью электромеханического линейного привода 7;
- принятие стойкой 1 шасси вертикального положения и включение стопора 16 выпущенного положения шасси,
при этом после взлета и стопорения шасси стопором 18 относительно ниши 5 на все время полета, а также при подготовке к посадке после принятия стойкой 1 вертикального положения и включения стопора 16 шасси выдвижное звено 14 отводится от рычага 6 в диагностическое положение; перед включением электродвигателя 11 для уборки шасси после взлета или для выпуска шасси при снижении перед посадкой диагностируют работоспособность электромеханического линейного привода 7, при этом включают электродвигатель 11, меняют направление движения выдвижного звена 14 в пределах заданного диагностического диапазона его перемещения и, при подтверждении работоспособности электромеханического линейного привода 7, доводят выдвижное звено 14 до контакта с рычагом 6 и выключают электродвигатель 11. Диагностический интервал перемещений выбирается из диапазона 1,1…1,2 шага винтового механизма 12.
Устройство электромеханического привода шасси самолета обеспечивает:
- функционирование в режиме диагностики состояния устройства перед уборкой шасси и перед выпуском шасси;
- уборку шасси после взлета самолета;
- выпуск шасси при снижении перед посадкой самолета;
- аварийный выпуск шасси при снижении перед посадкой самолета.
Функционирование в режиме диагностики состояния устройства обеспечивает проверку исправности устройства электромеханического привода шасси и выдачу информации о его техническом состоянии в управляющую надсистему (не показана).
Режим диагностики устройство может осуществлять автоматически при подаче питания в систему электромеханического привода шасси или подаче сигнала на уборку или выпуск шасси.
Проверка исправности устройства осуществляется на диагностическом интервале перемещений выдвижного звена 14 при отсутствии его контакта с рычагом 6, когда шасси расположено в выпущенном положении (фиг.1) или убранном положении (фиг.2). Для электромеханического линейного привода 7 диагностический интервал перемещений выдвижного звена 14 составляет 1,1…1,2 шага винтового механизма (фиг.15).
В режиме диагностики (фиг.15, 16) выдвижное звено 14 перемещается в центральную точку диагностического интервала. Проверка исправности электромеханического линейного привода 7 осуществляется методом подачи диагностического сигнала на перемещение в крайние положения диагностического интервала и контролем исполнения устройством диагностического сигнала. В качестве выходных сигналов используются: ток в цепи электродвигателя, величина линейного перемещения. В режиме диагностики проверяется перемещение выходного звена 14 на 1,1…1,2 шага винтового механизма 12. При выявлении неисправности устройства в полете выпуск шасси осуществляется в аварийном режиме.
Уборка шасси самолета
При подаче сигнала на уборку шасси включается электродвигатель 11, и при вращении его ротора 13 с валом и винта винтового механизма 12 происходит линейное перемещение выдвижного звена 14, рычага 6 и стойки 1 и уборка шасси в крайнее положение. При этом выдвижное звено 14 обеспечивает передачу силы от электромеханического линейного привода 7 на шасси, а шток 22 направляет выдвижное звено 14 на рычаг 6, обеспечивая их постоянный контакт. После фиксации шасси в убранном положении выдвижное звено 14 возвращается в исходное положение (внутрь корпуса электромеханического линейного привода 7), но не доходит до крайнего положения на величину диагностического интервала, чем при неисправности устройства или аварийной ситуации обеспечивается аварийный выпуск шасси под действием силы тяжести и набегающего воздушного потока.
Выпуск шасси самолета
При подаче сигнала на выпуск шасси и включении электродвигателя 11 устройство переходит в режим диагностики состояния устройства. По результатам диагностики информация об исправности устройства поступает в управляющую над систему (не показана). В нормальном режиме работы выдвижное звено 14 перемещается до соприкосновения с рычагом 6 стойки 1 шасси. После снятия стойки 1 шасси с фиксации стопором 18 происходит приложение нагрузки на выдвижное звено 14 со стороны рычага 6, при работе электродвигателя 11 стойка 1 поворачивается со скоростью втягивания выдвижного звена 14 в корпус, задаваемой системой управления работой электродвигателя 11.
Аварийный выпуск шасси самолета
При подаче сигнала на выпуск шасси устройство переходит в режим диагностики. По результатам диагностики информация об исправности устройства поступает в управляющую надсистему (не показана). В аварийном режиме выдвижное звено 14 не перемещается. Стойка 1 шасси при аварийном выпуске выходит из ниши 5 под действием силы тяжести.
Если в результате диагностики выявляется неработоспособность одного из двух электромеханических линейных приводов 7а или 7b (фиг.4, 6, 8, 10, 11), то выдвижное звено 14 аварийного электромеханического линейного привода 7 вводится в корпус 8, и в работу включается работоспособный электромеханический линейный привод.
Если выявляется отказ работы двух электромеханических линейных приводов 7, то их выдвижные звенья 14 вводятся в корпуса 8, и выпуск шасси совершается действием на него собственной силы тяжести.
При уборке и выпуске шасси, несмотря на изменение положения корпуса 8 электромеханического линейного привода 7 относительно ниши 5 шасси, благодаря наличию направляющего механизма 20 выдвижное звено 14 при его выдвижении всегда вступает в контакт с рычагом 6 стойки 1.
Изобретение относится к авиационной технике, а именно к взлетно-посадочным убираемым устройствам самолета для уборки-выпуска опор шасси. Устройство привода уборки-выпуска шасси содержит стойку с колесами, установленную с возможностью поворота на оси стойки, расположенной в главном кронштейне, закрепленном в нише шасси, и рычаг стойки, жестко закрепленный на верхнем конце стойки, электромеханический линейный привод (ЭМЛП) поворота стойки относительно оси. Корпус ЭМЛП и соединение корпуса с кронштейном привода, закрепленным в нише шасси, образует вращательную пару. В корпусе ЭМЛП расположен электродвигатель, винтовой механизм, преобразующий вращательное движение вала электродвигателя в поступательное движение выдвижного звена, взаимодействующего с рычагом стойки. При этом выдвижное звено образует с рычагом стойки контактную пару с размыкаемой областью контакта. ЭМЛП имеет механизм направления выдвижного звена на рычаг стойки, обеспечивающий сохранение контакта выдвижного звена и рычага при повороте корпуса ЭМЛП в процессе работы шасси. Механизм направления образует с рычагом стойки одноподвижную вращательную кинематическую пару (ОВКП). В процессе работы устройства выдвижное звено отводится от рычага в диагностическое положение. Перед включением электродвигателя диагностируют работоспособность ЭМЛП. При этом включают электродвигатель, затем меняют направление движения выдвижного звена в пределах заданного диагностического диапазона его перемещения и при подтверждении работоспособности ЭМЛП доводят выдвижное звено до контакта с рычагом, после чего выключают электродвигатель. Достигается упрощение конструкции и повышение надежности работы устройства. 2 н. и 16 з.п. ф-лы, 16 ил.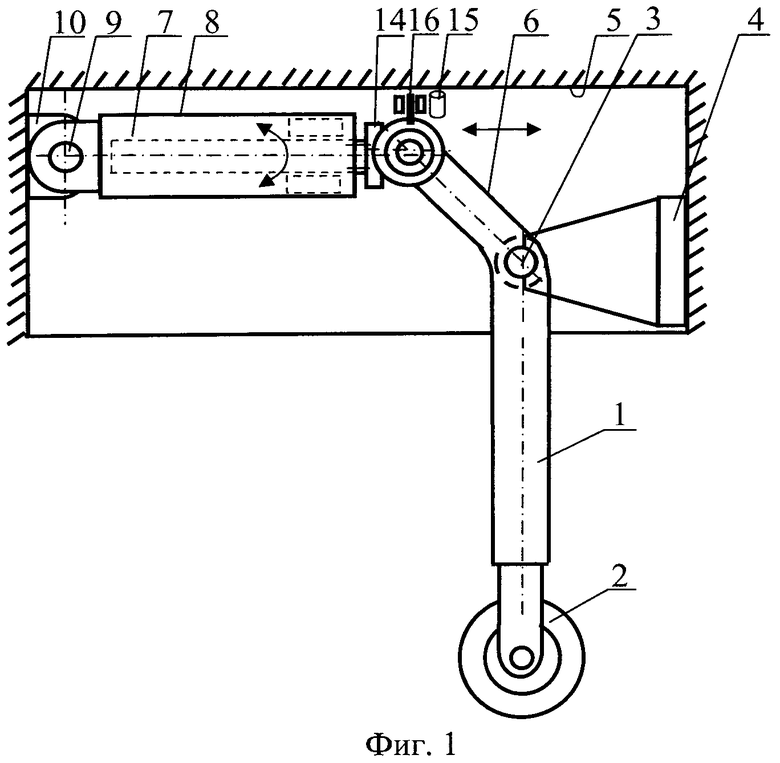
1. Устройство привода уборки-выпуска шасси самолета, включающее стойку с колесами, установленную с возможностью поворота на оси стойки, расположенной в главном кронштейне, закрепленном в нише шасси, и рычаг стойки, жестко закрепленный на верхнем конце стойки, имеющее, по меньшей мере, один электромеханический линейный привод (ЭМЛП) поворота стойки относительно оси; корпус ЭМЛП и соединение корпуса с кронштейном привода, закрепленным в нише шасси, образующее вращательную пару; расположенные в корпусе ЭМЛП электродвигатель, винтовой механизм, преобразующий вращательное движение вала электродвигателя в поступательное движение выдвижного звена, взаимодействующего с рычагом стойки; датчик и стопор выпущенного положения шасси; датчик и стопор убранного положения шасси, отличающееся тем, что выдвижное звено образует с рычагом стойки контактную пару с размыкаемой областью контакта, а ЭМЛП имеет механизм направления выдвижного звена на рычаг стойки, обеспечивающий сохранение контакта выдвижного звена и рычага при повороте корпуса ЭМЛП в процессе уборки или выпуска шасси, при этом механизм направления образует с рычагом стойки, по меньшей мере, одну одноподвижную вращательную кинематическую пару (ОВКП).
2. Устройство по п.1, отличающееся тем, что механизм направления выдвижного звена на рычаг стойки включает, по меньшей мере, один шток, соединение конца которого с рычагом стойки образует ОВКП, ось которой перпендикулярна оси выдвижного звена и оси стойки, а соединение штока с корпусом ЭМЛП выполнено в виде одноподвижной поступательной кинематической пары (ОПКП).
3. Устройство по п.2, отличающееся тем, что ОПКП образована соосно расположенными выдвижным звеном с центральным отверстием и штоком, размещенным подвижно в центральном отверстии.
4. Устройство по п.3, отличающееся тем, что оно имеет два ЭМЛП, при этом соединения концов каждого штока с рычагом, образующие ОВКП, расположены на одной оси.
5. Устройство по п.2, отличающееся тем, что механизм направления имеет одну ОПКП, образованную корпусом, имеющим на внешней поверхности выступ с отверстием, ось которого параллельна оси выдвижного звена, расположена в плоскости, проходящей через ось выдвижного звена и ось ОВКП, и подвижно расположенным в отверстии штоком.
6. Устройство по п.5, отличающееся тем, что оно имеет два ЭМЛП и два механизма направления, при этом соединения концов каждого штока с рычагом, образующие ОВКП, расположены на одной оси.
7. Устройство по п.5, отличающееся тем, что оно имеет вторую ОПКП, расположенную симметрично относительно имеющейся ОПКП и в той же плоскости, при этом ОВКП, образованные соединениями концов каждого штока с рычагом, расположены на одной оси.
8. Устройство по п.2, отличающееся тем, что оно имеет два ЭМЛП, корпуса которых соединены перемычкой с отверстием, ось которого параллельна осям выдвижных звеньев и расположена в плоскости, проходящей через оси выдвижных звеньев, при этом ОПКП механизма направления образована перемычкой с отверстием и подвижно расположенным в отверстии штоком.
9. Устройство по п.2, отличающееся тем, что механизм направления имеет одно соединение с ЭМЛП в виде ОПКП, образованной втулкой, установленной подвижно на корпусе ЭМЛП, и штоком, закрепленным на втулке так, что ось штока расположена в плоскости, проходящей через ось выдвижного звена и ось ОВКП.
10. Устройство по п.9, отличающееся тем, что оно имеет два ЭМЛП и два механизма направления, при этом соединения концов каждого штока с рычагом, образующие ОВКП, расположены на одной оси.
11. Устройство по п.2, отличающееся тем, что оно имеет два ЭМЛП, на корпусах которых установлены втулки с возможностью поступательного движения, соединенные перемычкой, при этом шток закреплен на перемычке так, что ось штока расположена в плоскости, проходящей через оси выдвижных звеньев ЭМЛП.
12. Устройство по п.2, отличающееся тем, что механизм направления имеет два штока, соединения концов которых с рычагом стойки в виде ОВКП расположены на одной оси; при этом соединения штоков с ЭМЛП в виде ОПКП образованы втулкой, установленной подвижно на корпусе ЭМЛП, и штоками, закрепленными на втулке так, что оси штоков расположены в плоскости, проходящей через ось выдвижного звена и ось ОВКП.
13. Устройство по любому из пп.1-12, отличающееся тем, что оно имеет редуктор с промежуточными телами вращения.
14. Устройство по любому из пп.1-12, отличающееся тем, что оно имеет одноступенчатый редуктор с промежуточными телами вращения.
15. Устройство по любому из пп.1-12, отличающееся тем, что ЭМЛП имеет одноступенчатый волновой редуктор с телами вращения, установленный между электродвигателем и винтовым механизмом, при этом частота вращения ротора электродвигателя ЭМЛП находится в интервале 5000…20000 мин-1.
16. Устройство по любому из пп.1-12, отличающееся тем, что ЭМЛП имеет двухступенчатый волновой редуктор с телами вращения, установленный между электродвигателем и винтовым механизмом, при этом частота вращения ротора электродвигателя ЭМЛП находится в интервале 5000…20000 мин-1.
17. Способ работы устройства привода уборки-выпуска шасси самолета, включающего стойку с колесами, установленную с возможностью поворота на оси стойки, расположенной в главном кронштейне, закрепленном в нише шасси, и рычаг стойки, жестко закрепленный на верхнем конце стойки, имеющего, по меньшей мере, один электромеханический линейный привод (ЭМЛП) поворота стойки относительно оси; корпус ЭМЛП и соединение корпуса с кронштейном привода, закрепленным в нише шасси, образующее вращательную пару; расположенные в корпусе ЭМЛП электродвигатель, винтовой механизм, преобразующий вращательное движение вала электродвигателя в поступательное движение выдвижного звена, взаимодействующего с рычагом стойки; датчик и стопор выпущенного положения шасси; датчик и стопор убранного положения шасси, у которого выдвижное звено образует с рычагом стойки контактную пару с размыкаемой областью контакта, а ЭМЛП имеет механизм направления выдвижного звена на рычаг стойки, обеспечивающий сохранение контакта выдвижного звена и рычага при повороте корпуса ЭМЛП в процессе уборки или выпуска шасси, при этом механизм направления образует с рычагом стойки, по меньшей мере, одну одноподвижную вращательную кинематическую пару (ОВКП), включающий снятие шасси со стопора после взлета самолета; включение электродвигателя ЭМЛП, вращение валов редуктора, винта и перемещение выдвижного звена; поворот стойки относительно ее оси и уборка шасси в процессе перемещения и действия выдвижного звена на рычаг стойки; стопорение шасси относительно ниши на все время полета; снятие шасси со стопора для выпуска шасси в процессе снижения для посадки самолета; включение электродвигателя ЭМЛП, вращение валов редуктора, винта и перемещение выдвижного звена; вращение стойки под действием силы тяжести при выпуске шасси и стабилизация скорости поворота стойки относительно ее оси с помощью ЭМЛП; принятие стойкой шасси вертикального положения и включение стопора шасси, отличающийся тем, что после взлета и стопорения шасси относительно ниши на все время полета, а также при подготовке к посадке после принятия стойкой шасси вертикального положения и включения стопора шасси выдвижное звено отводится от рычага в диагностическое положение; перед включением электродвигателя для уборки шасси после взлета или для выпуска шасси при снижении перед посадкой диагностируют работоспособность ЭМЛП, при этом включают электродвигатель, меняют направление движения выдвижного звена в пределах заданного диагностического диапазона его перемещения и, при подтверждении работоспособности ЭМЛП, доводят выдвижное звено до контакта с рычагом и выключают электродвигатель.
18. Способ по п.17, отличающийся тем, что диагностический интервал перемещений выдвижного звена выбирается из диапазона 1,1…1,2 шага винтового механизма.
| US 2011042511 A1, 24.02.2011 | |||
| US 2010012779 A1, 21.01.2010 | |||
| US 2010282901 A1, 11.11.2010 | |||
| УБИРАЮЩЕЕСЯ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1975 |
|
SU524354A1 |
| SU 64148 A1, 31.01.1945 | |||

