Изобретение относится к области авиации, а именно к системам рулевых поверхностей для управления основными летными функциями самолетов с помощью электромеханических приводов.
Известна система управления самолетом, обеспечивающая безопасность полета (патент US №4754940 от 20.08.1986), имеющая две системы силового привода рулевых поверхностей - элеронов и рулей направления, при этом каждый элерон разделен на две части: внутреннюю и внешнюю, каждая из которых имеет силовой привод.
Известна система силовых приводов рулевых поверхностей (патент US №4779822 от 02.09.1986), каждая из которых разделена на две части, возможно имеющие разные площади поверхностей, при этом каждая из частей приводится в действие одним или двумя силовыми приводами вращательного движения, каждый силовой привод в системе приводов управления имеет электронный блок управления.
Ни в одной из известных систем приводов рулевых поверхностей не указывается, по каким принципам рулевые поверхности разделяются на две части.
Известна система управления полетом летательного аппарата (патент RU №2544251 от 07.01.2011), которая содержит множество разделенных рулевых поверхностей и связанных с ними приводов для управления летными функциями крена, рыскания, тангажа и аэродинамического торможения, при этом приводы рулевых поверхностей, связанные, по меньшей мере, с одной из летных функций, являются электромеханическими, а рулевые поверхности, - рули направления, рули высоты и элероны, - разделены, по меньшей мере, на две независимые поверхности, и каждая из рулевых поверхностей, полученных в результате разделения, управляется, по меньшей мере, одним электромеханическим приводом, а электромеханические приводы, связанные с рулевыми поверхностями, управляющими, по меньшей мере, двумя летными функциями, могут быть идентичными.
Недостатки известной системы связаны с тем, что в ней отсутствуют принципы разделения рулевых поверхностей на две или три секции, что усложняет управление летными функциями, а также не позволяет повысить количество идентичных электромеханических приводов и надежность системы управления самолетом. Недостатком являются увеличенные габариты и масса электромеханических приводов из-за отсутствия ограничения минимальных частот вращения роторов электродвигателей и указаний на тип выбранных электромеханических приводов и их редукторов. Существенный недостаток описанной системы управления - отсутствие блоков управления электродвигателями и блоков управления (контроллеров) электромеханическими приводами с подсоединенными к ним датчиками углового положения валов электромеханических приводов и рулевых поверхностей, являющихся неотъемлемой частью системы управления.
Известны системы управления полетом самолета (патенты US №8567715 от 04.01.2011 и СА №2727592 от 18.01.2010), аналогичные системе управления, описанной в патенте RU №2544251, имеющие те же недостатки.
Известен самолет, имеющий разделенные рулевые поверхности (патент US №7896288 от 05.12.2005, п.ф. 9) и система управления ими. Недостаток известного самолета - в том, что при разделении рулевых поверхностей на секции, имеющие равные площади, моменты от аэродинамических сил, действующие на самолет относительно его продольной оси, проходящей через его центр тяжести, при управлении секциями, различны, что снижает надежность управления полетом. Другой недостаток - в том, что в описании изобретения не указаны типы приводов секций рулевых поверхностей, что не позволяет оптимизировать их массу и габариты.
Известна система управления аэродинамической поверхностью летательного аппарата (патент RU №2531998 от 18.10.2011), содержащая два электромеханических привода, устройства управления каждым из электромеханических приводов и центральный блок управления, при этом устройства управления электромеханическими приводами могут быть соединены между собой, и каждое из устройств управления может выполнять функции управления обоими электромеханическими приводами.
Недостаток данной системы - в ее пониженной надежности вследствие управления двумя электромеханическими приводами одной аэродинамической поверхностью, что при отказе одного электромеханического привода может привести к отказу в работе аэродинамической поверхности.
Известна система управления с электромеханическим приводом линейного перемещения руля направления самолета с электрическим двигателем с постоянным магнитом (http://www.power-e.ru/2006_04_42.php; рис. 3, 4-11); в которой используется электродвигатель, имеющий номинальную частоту вращения ротора 5000 мин-1, испытанный на нагрузочном устройстве при рабочих режимах с реверсом при угловых скоростях от 1000 рад/с (9554 мин-1) до -1000 рад/с (-9554 мин-1).
Недостаток данной системы управления - в ее значительных габаритах и массе, которые существенно зависят от типа электродвигателя.
Известны электромеханические приводы аэродинамических поверхностей самолета (патенты RU №108238 от 09.06.2010, RU №108239 от 09.06.2010, RU №2442721 от 09.06.2010, RU №2515014 от 25.07.2012, RU №2522635 от 25.07.2012, RU №2522638 от 25.07.2012, RU №2522646 от 25.07.2012), включающие электрический двигатель с номинальной частотой вращения ротора, выбираемой из диапазона от 3000 мин-1 до 25000 мин-1 с датчиком углового положения ротора и присоединенный к нему волновой редуктор с телами вращения с количеством ступеней от 1 до 3 с датчиком углового положения выходного вала, характеризуемые передаточным отношением, выбираемым из интервала от 500 до 2500. Электромеханический линейный привод (патент RU №2522646) включает шарико-винтовой преобразователь вращательного движения выходного вала в поступательное движение выходного звена, соединенного с управляемой рулевой поверхностью.
Недостатки данного электромеханического привода - в том, что он служит для приводов неразделенных рулевых поверхностей, следовательно, отсутствует возможность унификации приводов по мощности и конструкции.
Известно устройство электрического привода самолета (патент US №8698444 от 25.03.2010), включающее множество электроприводов постоянного или переменного тока, объединенных в функциональные группы, подсоединенных к силовой электросети, имеющей силовой конвертер для преобразования электрической энергии, поступающей из силовой электросети к электродвигателям; систему управления множеством электрических приводов рулевых поверхностей первого режима функционирования (курса, тангажа и крена) при полете с высокой скоростью, включающую контроллеры и компьютеры управления полетом.
Недостаток известного устройства электроприводов самолета, - увеличенные массо-габаритные характеристики используемых в системе управления электромеханических приводов, как с вращательным движением выходного звена, так и с его линейным перемещением, обусловленные отсутствием ограничений минимальных значений номинальной частоты вращения ротора электродвигателя и указаний на конструктивный тип редуктора.
Известна архитектура электрической системы привода поверхностей управления полетом (заявка US №2007/0007385 от 29.07.2005), содержащая: рулевые поверхности, расположенные слева и справа от фюзеляжа, служащие для управления летными функциями курса, тангажа и крена; по меньшей мере, один следящий электромеханический привод, выходные звенья которого совершают вращательное движение и/или линейное перемещение, соединенный с каждой из секций разделенной рулевой поверхности; блоки управления следящими электромеханическими приводами расположенных слева или справа от фюзеляжа рулевых поверхностей, выполняющих управление летными функциями курса, тангажа и крена; блоки управления электродвигателями следящих электромеханических приводов (контроллеры), соединенные интерфейсными шинами с блоками управления следящими электромеханическими приводами рулевых поверхностей; центральный блок управления (бортовой компьютер), соединенный интерфейсными шинами с блоками управления следящими электромеханическими приводами и с бортовым компьютером; датчики углового положения каждого выходного вала следящего электромеханического привода, соединенные интерфейсными шинами с блоками управления следящими электромеханическими приводами; датчики углового положения и скорости каждой секции рулевой поверхности, соединенные интерфейсной шиной с блоками управления следящими электромеханическими приводами рулевых поверхностей.
Недостатки системы по данному патенту - в том, что в ее описании не ограничено нижнее значение номинальных частот вращения роторов электродвигателей, и не указано, какие редукторы используются в конструкции электромеханических приводов, что может приводить к увеличенным массе и габаритам электромеханических приводов.
Известна система электрического управления рулевыми поверхностями самолета (патент US №6863242 от 31.07.2003, п.ф. 15), включающая: разделенные, по меньшей мере, на две секции рулевые поверхности (рули направления, рули высоты и элероны), выполняющие управляющие функции курса, тангажа и крена; по меньшей мере, один привод каждой секции; систему управления приводами каждой секции рулевой поверхности; блок управления и вычислительный блок, вырабатывающие команды управления приводами секций рулевых поверхностей; датчики, позволяющие измерять величины различных параметров, определяющих состояние полета.
Недостаток данного изобретения - в том, что в нем не указан принцип разделения рулевых поверхностей на секции, тип приводов секций рулевых поверхностей и, соответственно, неизвестно, при каком типе приводов и частотах вращения роторов электродвигателей обеспечиваются их минимальные габариты и массы и минимальное силовое воздействие на силовой набор оперения самолета.
Техническая задача изобретения - равномерное распределение нагрузок, воспринимаемых силовым набором оперения, повышение надежности выполнения летных функций, снижение массы электромеханических приводов и их унификация.
Техническая задача решена в системе рулевых поверхностей с электромеханическими приводами для управления основными летными функциями самолета, содержащей разделенные на секции рулевые поверхности, расположенные выше продольной оси самолета, служащие для управления летными функциями курса, и расположенные слева и справа от продольной оси самолета, служащие для управления летными функциями тангажа и крена; по меньшей мере, один следящий электромеханический привод, закрепленный на неподвижном элементе силового набора оперения, соединенный с каждой из секций разделенной рулевой поверхности, номинальная мощность которого зависит от площади приводимой им секции, и выходные звенья которого совершают вращательное движение или линейное перемещение; поверхности аэродинамического торможения (тормозные щитки, интерцепторы), имеющие, по меньшей мере, один следящий электромеханический привод, выходные звенья которого совершают вращательное движение или линейное перемещение; блоки управления следящими электромеханическими приводами рулевых поверхностей, выполняющих управление летными функциями курса, тангажа и крена и поверхностями аэродинамического торможения; блоки управления электродвигателями следящих электромеханических приводов, соединенные интерфейсными шинами с блоками управления следящими электромеханическими приводами рулевых поверхностей и поверхностей аэродинамического торможения; по меньшей мере, один центральный блок управления (компьютер, контроллер) рулевыми поверхностями каждой из функций курса, тангажа и крена и поверхностями аэродинамического торможения, соединенный интерфейсными шинами с блоками управления следящими электромеханическими приводами и с бортовым компьютером; датчики углового положения выходного вала каждого следящего электромеханического привода, соединенные интерфейсными шинами с блоками управления следящими электромеханическими приводами; датчики положения каждой секции рулевой поверхности и поверхностей аэродинамического торможения, соединенные интерфейсными шинами с блоками управления следящими электромеханическими приводами рулевых поверхностей, при этом рулевые поверхности курса, тангажа и крена разделены на несколько секций так, что наиболее удаленная от продольной оси самолета первая секция имеет наименьшую площадь, равную полной площади рулевой поверхности, поделенной на сумму ряда целых чисел от единицы до количества секций в рулевой поверхности, а каждая секция, следующая за первой секцией рулевой поверхности, по направлению к продольной оси самолета, имеет площадь, равную произведению площади первой секции на порядковый номер секции, а каждый электродвигатель следящего электромеханического привода каждой секции рулевой поверхности является бесколлекторным вентильным электродвигателем постоянного тока с постоянными магнитами с частотой вращения ротора электродвигателя, выбираемой из интервала 6000…60000 мин-1, а следящий электромеханический привод имеет соединенный с валом ротора электродвигателя волновой многоступенчатый редуктор с телами вращения с передаточным отношением, выбираемым из интервала 500…4000.
Для дополнительного снижения массы электромеханических приводов бесколлекторный вентильный электродвигатель следящего электромеханического привода имеет частоту вращения вала ротора, выбираемую из интервала 26000…60000 мин-1, а соединенный с валом ротора электродвигателя волновой редуктор с телами вращения имеет две или три ступени с передаточным отношением, выбираемым из интервала 1000…4000.
Для использования идентичных по мощности электромеханических приводов секций разделенных рулевых поверхностей номинальная мощность одного или нескольких следящих электромеханических приводов каждой секции рулевых поверхностей, следующей после наиболее удаленной от продольной оси самолета первой секции, имеющей наименьшую площадь, определяется в зависимости от номинальной мощности следящего электромеханического привода первой секции по формуле:
Ni=i⋅N1,
где i - номер секции рулевой поверхности;
N1 и Ni - соответственно мощности 1-й и i-й секций.
Для унификации электромеханических приводов номинальная мощность каждого электромеханического привода каждой секции рулевой поверхности равна мощности электромеханического привода первой секции рулевой поверхности, количество следящих электромеханических приводов в секциях рулевых поверхностей, следующих по направлению к оси самолета, равно порядковому номеру секции, при этом электромеханические приводы являются идентичными, а номинальная мощность каждого следящего электромеханического привода каждой секции рулевых поверхностей равна номинальной мощности электромеханического привода первой секции рулевой поверхности.
Для повышения надежности выполнения летных функций первая секция рулевых поверхностей имеет два следящих электромеханических привода, назначенная номинальная мощность каждого из которых равна 0,5-0,7 номинальной мощности электромеханического привода при одном следящем электромеханическом приводе первой секции.
Для повышения унификации электромеханических приводов следящие электромеханические приводы секций рулевых поверхностей, выполняющих управление летными функциями курса, тангажа и крена, имеющих равные площади, являются идентичными, а также следящие электромеханические приводы поверхностей аэродинамического торможения, имеющих равные площади, являются идентичными.
В зависимости от величины хода, необходимого для поворота каждой из секций рулевых поверхностей, следящие электромеханические приводы секций могут быть электромеханическими приводами вращательного движения или линейного перемещения.
Достижение технического эффекта, - равномерное распределение нагрузок, воспринимаемых силовым набором оперения, повышение надежности выполнения летных функций, снижение массы электромеханических приводов и их унификация, - обеспечивается совокупностью следующих отличительных признаков.
Для равномерного распределения нагрузок, воспринимаемых силовыми элементами конструкций аэродинамических поверхностей, и повышения надежности выполнения летных функций рулевые поверхности курса, тангажа и крена разделены на несколько секций так, что наиболее удаленная от продольной оси самолета первая секция имеет наименьшую площадь, равную полной площади рулевой поверхности, поделенной на сумму ряда целых чисел от единицы до количества секций в рулевой поверхности, а каждая секция, следующая за первой секцией рулевой поверхности, по направлению к продольной оси самолета, имеет площадь, равную произведению площади первой секции на порядковый номер секции, а каждый электродвигатель следящего электромеханического привода каждой секции рулевой поверхности является бесколлекторным вентильным электродвигателем постоянного тока с постоянными магнитами с частотой вращения ротора электродвигателя, выбираемой из интервала 6000…60000 мин-1, а следящий электромеханический привод имеет соединенный с валом ротора электродвигателя волновой многоступенчатый редуктор с телами вращения с передаточным отношением, выбираемым из интервала 500…4000.
Для дополнительного снижения массы электромеханических приводов бесколлекторный вентильный электродвигатель следящего электромеханического привода имеет частоту вращения вала ротора, выбираемую из интервала 26000…60000 мин-1, а соединенный с валом ротора электродвигателя волновой редуктор с телами вращения имеет две или три ступени с передаточным отношением, выбираемым из интервала 1000…4000.
Для использования идентичных по мощности электромеханических приводов секций разделенных рулевых поверхностей номинальная мощность одного или нескольких следящих электромеханических приводов каждой секции рулевых поверхностей, следующей после наиболее удаленной от продольной оси самолета первой секции, имеющей наименьшую площадь, определяется в зависимости от номинальной мощности следящего электромеханического привода первой секции по формуле
Ni=i⋅N1,
где i - номер секции рулевой поверхности;
N1 и Ni - соответственно мощности 1-й и i-й секций.
Для унификации электромеханических приводов номинальная мощность каждого электромеханического привода каждой секции рулевой поверхности равна мощности электромеханического привода первой секции рулевой поверхности, количество следящих электромеханических приводов в секциях рулевых поверхностей, следующих по направлению к оси самолета, равно порядковому номеру секции, при этом электромеханические приводы являются идентичными, а номинальная мощность каждого следящего электромеханического привода каждой секции рулевых поверхностей равна номинальной мощности электромеханического привода первой секции рулевой поверхности.
Для повышения надежности выполнения летных функций первая секция рулевых поверхностей имеет два следящих электромеханических привода, назначенная номинальная мощность каждого из которых равна 0,5-0,7 номинальной мощности электромеханического привода при одном следящем электромеханическом приводе первой секции.
Для повышения унификации электромеханических приводов следящие электромеханические приводы секций рулевых поверхностей, выполняющих управление летными функциями курса, тангажа и крена, имеющих равные площади, являются идентичными, а также следящие электромеханические приводы поверхностей аэродинамического торможения, имеющих равные площади, являются идентичными.
В зависимости от величины хода, необходимого для поворота каждой из секций рулевых поверхностей, следящие электромеханические приводы секций могут быть электромеханическими приводами вращательного движения или линейного перемещения.
Данная совокупность отличительных признаков не обнаружена в ходе патентно-информационного поиска, следовательно, техническое решение соответствует критерию «новизна». Так как она не следует явно из уровня техники, техническое решение соответствует критерию «изобретательский уровень».
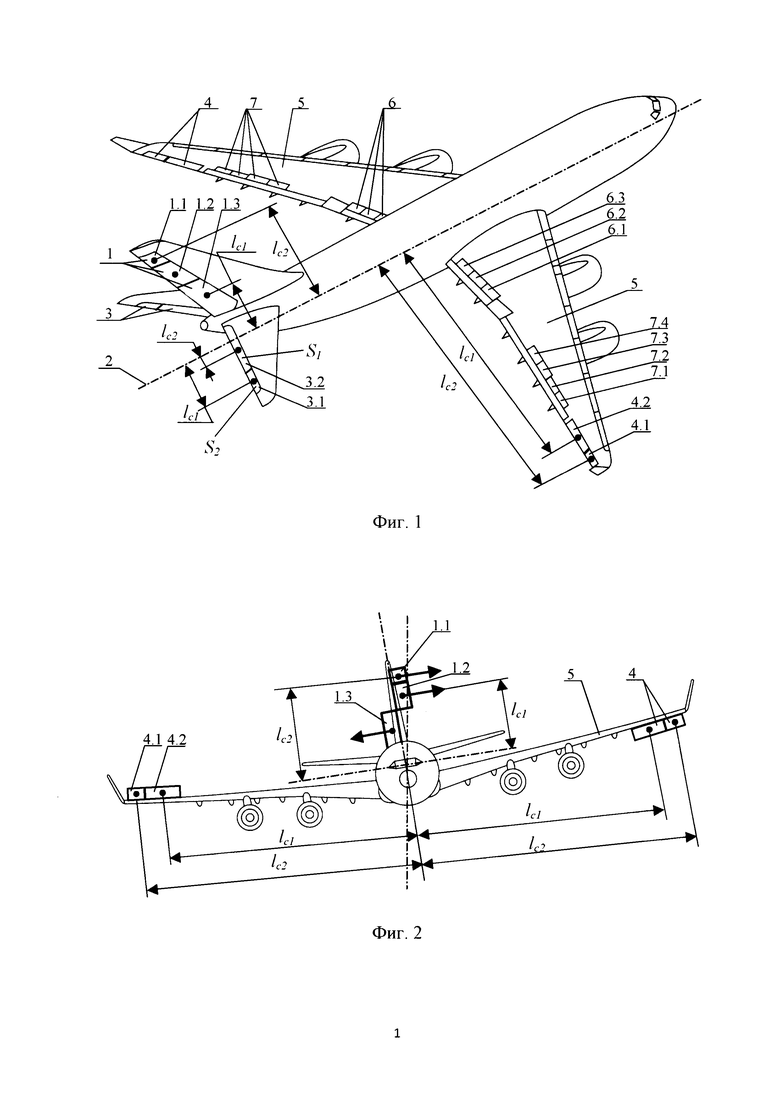
На фиг. 1 показан общий вид самолета с разделенными рулевыми поверхностями и поверхностями аэродинамического торможения.
На фиг. 2 - вид самолета спереди с разделенными рулевыми поверхностями.
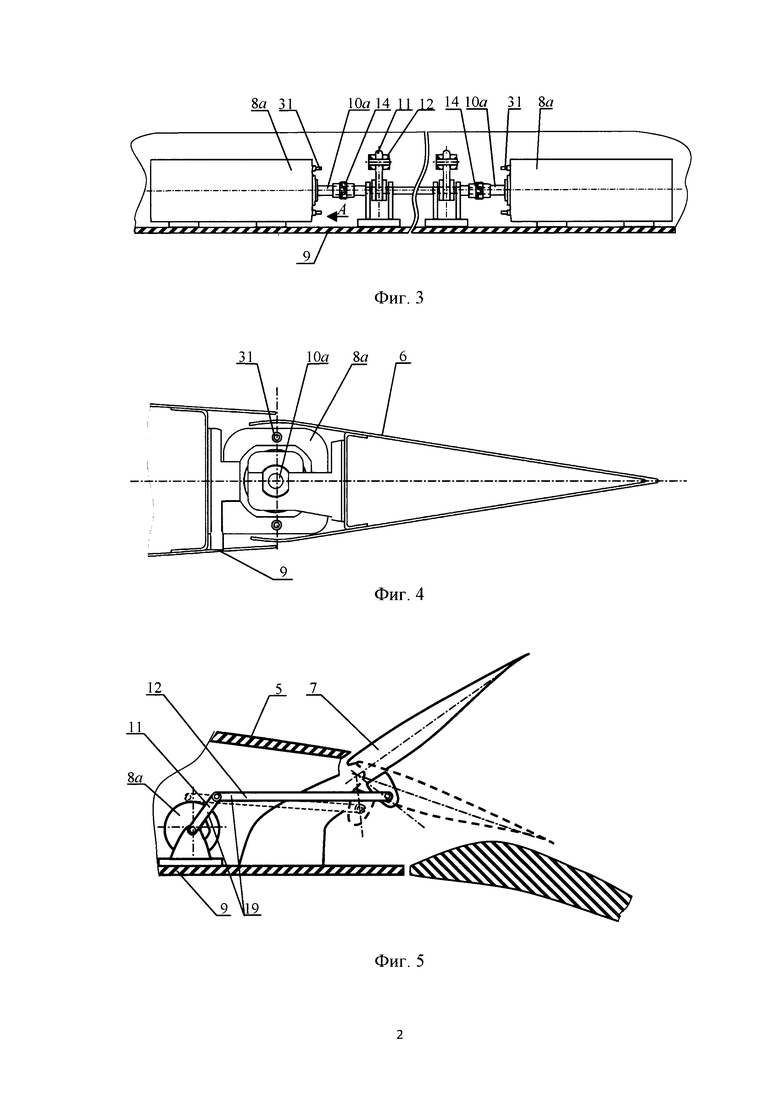
На фиг. 3 - два электромеханических привода вращательного движения для разделенных рулевых поверхностей и поверхностей аэродинамического торможения.
На фиг. 4 - вид A на фиг. 3.
На фиг. 5 - электромеханический привод вращательного движения с кривошипно-шатунным механизмом и рычагом для поворота поверхности аэродинамического торможения.
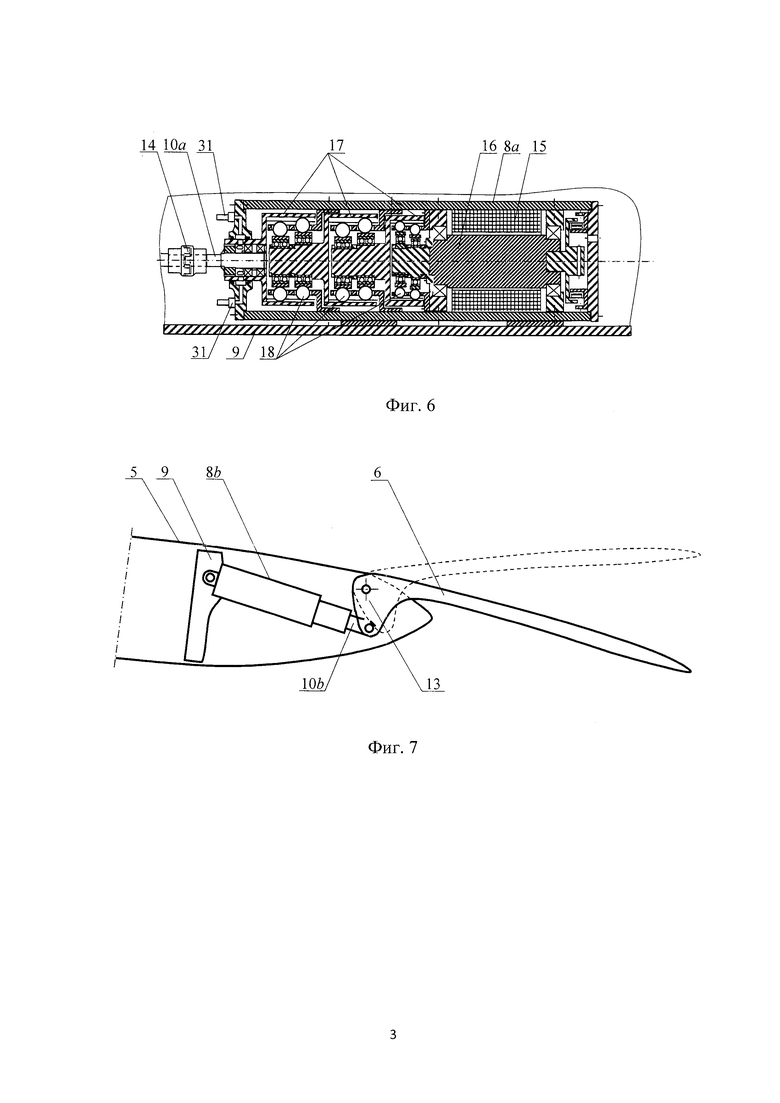
На фиг. 6 - электромеханический привод для рулевых поверхностей и поверхностей аэродинамического торможения с бесколлекторным вентильным электродвигателем постоянного тока с возбуждением от постоянных магнитов и с трехступенчатым волновым редуктором с телами вращения.
На фиг. 7 - линейный электромеханический привод рулевой поверхности или поверхности аэродинамического торможения.
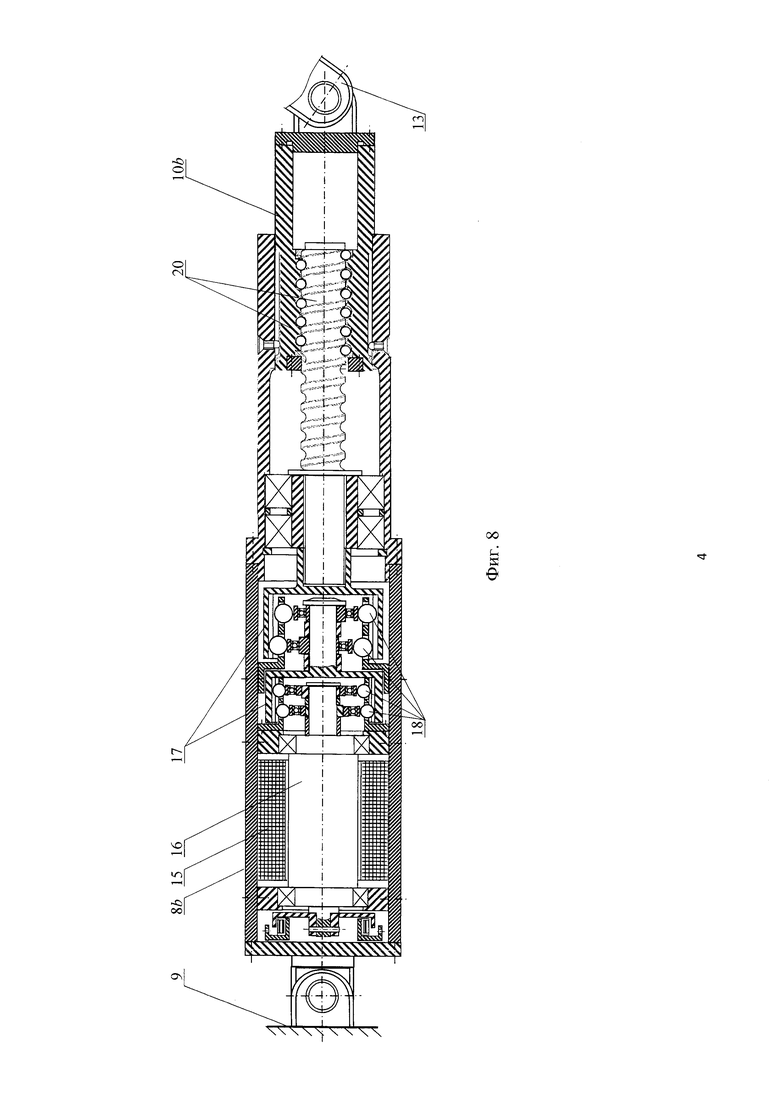
На фиг. 8 - конструкция линейного электромеханического привода с двухступенчатым волновым редуктором с телами вращения и с шарико-винтовым механизмом преобразования вращательного движения в поступательное для рулевой поверхности.
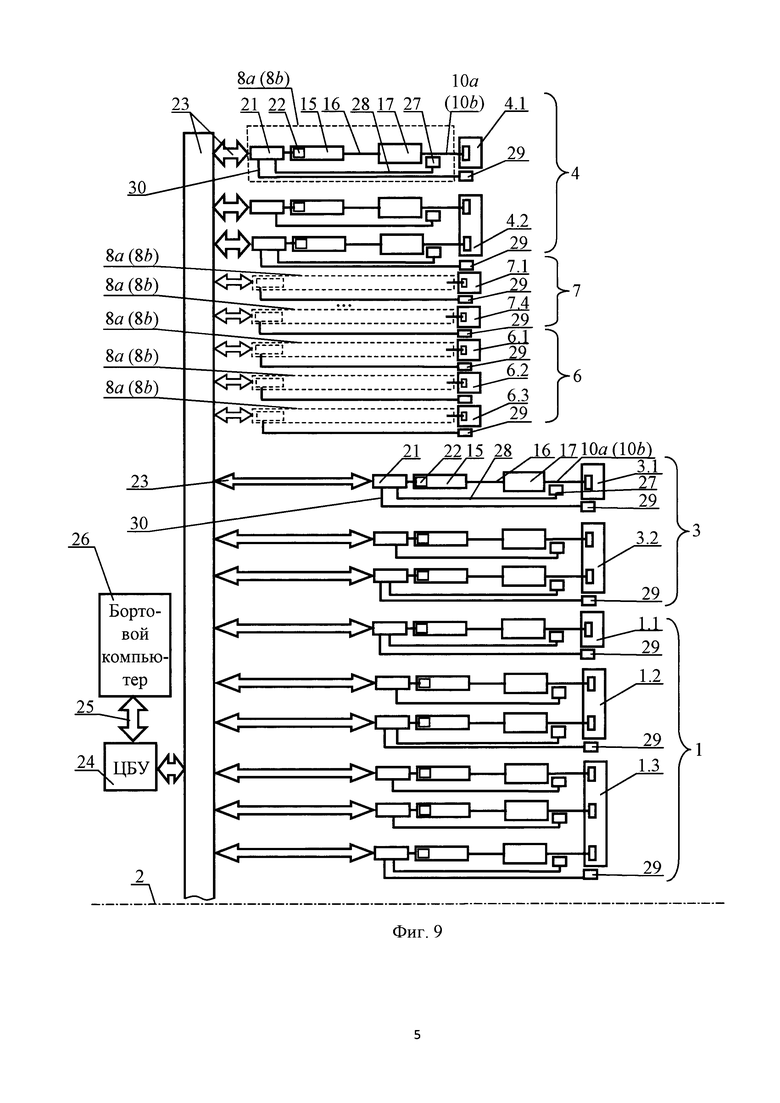
На фиг. 9 - система управления электромеханическими приводами рулевых поверхностей и поверхностей аэродинамического торможения самолета.
Система рулевых поверхностей с электромеханическими приводами для управления основными летными функциями самолета (фиг. 1-9) содержит рулевую поверхность 1 направления, служащую для управления курсом, и содержащую: разделенную на три секции (фиг. 1, 2), расположенные выше продольной оси 2 самолета, проходящей через его центр тяжести: наиболее удаленную от оси 2 первую секцию 1.1, имеющую наименьшую площадь S1.1, равную полной площади S1п рулевой поверхности 1 направления, поделенной на сумму ряда целых чисел от 1 до 3 (количество секций в рулевой поверхности равно 1+2+3=6):
 ;
;
площадь второй секции 1.2 равна 2S1.1, площадь третьей секции 1.3 равна 3S1.1; рулевые поверхности 3 (рули 3 высоты), служащие для управления функцией тангажа, расположенные слева и справа от продольной оси 2, каждая из которых разделена на две секции: секцию 3.1, наиболее удаленную от оси 2, и секцию 3.2, расположенную ближе к оси 2; площадь S3.1 секции 3.1 равна площади S3 рулевой поверхности 3, поделенной на сумму целых чисел 1+2=3:
 ,
,
а площадь секции 3.2: S3.2=2S3.1; каждый руль 3 высоты может быть разделен на 3 или более секций в соответствии с указанным выше принципом разделения; рулевые поверхности 4 (элероны 4), служащие для управления функцией крена, расположенные слева и справа от оси 2 в оконечности крыльев 5; каждый из элеронов 4 разделен на две секции: первую секцию 4.1, наиболее удаленную от оси 2, площадь S4.1 которой равна полной площади элерона S4п, поделенной на сумму целых чисел 1+2=3, то есть
 ,
,
и секцию 4.2, расположенную ближе к оси 2, площадь S4.2 которой равна S4.2=2S4.1; каждый элерон 4 может быть разделен на три или более секций; поверхности аэродинамического торможеия - тормозные щитки 6 и интерцепторы 7 (фиг. 1), расположенные в каждом из крыльев 5; по меньшей мере, один следящий электромеханический привод 8а (фиг. 3-6) или 8b (фиг. 7, 8), служащий для привода каждой секции каждой рулевой поверхности, закрепленный на неподвижном элементе 9 (фиг. 3-8) силового набора оперения, имеющий соответственно выходной вал 10а (фиг. 3, 4) или выходное звено 10b; каждая секция каждой из рулевых поверхностей 1, 3, 4 может иметь два или более электромеханических приводов 8а (8b) (фиг. 3-8), что повышает надежность системы управления рулевыми поверхностями при полете самолета; номинальная мощность всех электромеханических приводов 8а (8b) каждой секции каждой приводимой рулевой поверхности 1, 3, 4 зависит от ее площади, максимальной скорости полета и от максимальной скорости поворота секции рулевой поверхности в процессе управления полетом самолета; каждая секция каждой разделенной рулевой поверхности 1, 3, 4 имеет, по меньшей мере, один следящий электромеханический привод 8а (8b), номинальная мощность которого зависит от площади приводимой им секции и максимальной скорости ее поворота ["Определение предельных динамических характеристик рулевого привода на основе предельных режимов полета самолета. Т.Б. Близнова, Ю.Г. Оболенский, В.А. Полковников, Электронный журнал "Труды МАИ", выпуск №61. www.mai.ru/science/trudy/published.php?ID=35650]:
 ,
,
где Nн - номинальная мощность; М - шарнирный момент поворота секции рулевой поверхности; S - площадь секции рулевой поверхности; ωmax - максимальная угловая скорость поворота секции рулевой поверхности; υ - максимальная скорость полета;
- так как площадь второй или третьей секции рулевой поверхности кратна площади первой секции (1.1, 4.1), то номинальная мощность каждого следящего электромеханического привода 8а (8b) второй или третьей соответствующей каждой секции разделенной рулевой поверхности 1, 3, 4 равна номинальной мощности электромеханического привода 8а (8b) первой секции (1.1, 3.1, 4.1), а количество следящих электромеханических приводов 8а (8b), присоединенных ко второй или третьей секции разделенной рулевой поверхности, следующей по направлению к оси 2 самолета, равно порядковому номеру секции:
Ni=i⋅N1,
где i - номер секции рулевой поверхности, i=2 или i=3;
N1 и Ni - соответственно мощности 1-й и i-й секций.
Поверхности аэродинамического торможения - тормозные щитки 6 (фиг. 1, 7) и интерцепторы 7 (фиг. 1, 5) приводятся в движение, по меньшей мере, одним электромеханическим приводом 8а вращательного движения через шатун 11 и рычаг 12 (фиг. 3, 5) или электромеханическими приводами 8b линейного перемещения через рычаги 13 (фиг. 7, 8), но для повышения надежности путем резервирования могут приводиться и двумя электромеханическими приводами 8а или 8b через муфты 14 (фиг. 3, 6).
Для уменьшения габаритов и массы электромеханических приводов 8а или 8b, а также для уменьшения массы неподвижного элемента 9 силового набора оперения, к которому присоединены рулевые поверхности, каждый электродвигатель 15 (фиг. 6, 8) следящего электромеханического привода 8а (8b) каждой секции рулевой поверхности 1, 3, 4 является бесколлекторным вентильным электродвигателем постоянного тока с постоянными магнитами с частотой вращения ротора 16, выбираемой из интервала 6000…60000 мин-1, а следящий электромеханический привод 8а (8b) имеет соединенный с валом ротора 16 волновой многоступенчатый редуктор 17 с телами вращения 18 с передаточным отношением, выбираемым из интервала 500…4000.
При частоте вращения, меньшей 6000 мин-1, электромеханический привод 8а (8b) имеет низкий уровень удельной мощности электродвигателя 15, меньший 0,45 кВт/кг; прирост удельной мощности с увеличением частоты вращения ротора 16 электродвигателя 15 уменьшается, и при частоте вращения более 60000 мин-1 прирост удельной мощности становится небольшим; поэтому увеличение частоты вращения более 60000 мин-1 дает несущественный прирост удельной мощности и становится нецелесообразным.
Волновые редукторы 17 (фиг. 6, 8) с телами вращения 18 также имеют минимальные габариты, особенно в сравнении с наиболее применяемыми зубчатыми многоступенчатыми редукторами, а также, в сравнении с другими типами редукторов, позволяют иметь высокое передаточное отношение, обеспечивающее уменьшение угловой скорости поворота рулевой поверхности 1, 3, 4 в 500…4000 раз в сравнении с угловой скоростью вращения ротора 16 электродвигателя 15. Такой диапазон передаточных отношений редуктора необходим в связи с небольшой угловой скоростью поворота каждой из секций рулевых поверхностей и поверхностей аэродинамического торможения.
При использовании в электромеханических приводах 8а и 8b электродвигателей 15 с частотой вращения ротора 16 более 26000 мин-1 и двухступенчатого волнового редуктора 17 (фиг. 8) или трехступенчатого волнового редуктора 17 (фиг. 6) с телами вращения 18 с передаточным отношением 1000…4000 для двухступенчатого и трехступенчатого редукторов 17 соответственно, можно для привода секций разделенных рулевых поверхностей при повышении надежности увеличивать число электромеханических приводов 8а и 8b при меньшем увеличении их суммарной массы в сравнении с электромеханическими приводами, имеющими меньшую частоту вращения ротора электродвигателя.
В каркасе силового набора оперения, например, крыла 5, можно размещать несколько электромеханических приводов 8а и 8b для привода каждой секции разделенной рулевой поверхности, и, соответственно, повышать надежность управления основными функциями курса, тангажа, крена и аэродинамического торможения, не прибегая, наряду с электромеханическими приводами 8а и 8b, к электрогидравлическим приводам (не показаны) и электропневматическим приводам (не показаны), как это предлагается в известных изобретениях фирм Airbus, Honeywell, Boeing и используется в самолетах.
Следящие электромеханические приводы 8а и 8b, выполняющие управление секциями рулевых поверхностей 1, 3, 4 и поверхностями 6, 7 аэродинамического торможения, имеющими равные площади, могут быть идентичными как по номинальной мощности, так и по конструкции, что позволяет повысить уровень унификации электромеханических приводов 8а и 8b и снизить их себестоимость.
Наибольший уровень унификации достигается для следящих электромеханических приводов 8а (8b) секций тех рулевых поверхностей, площади которых кратны площади первой секции (1.1, 3.1,4.1), так как количество электромеханических приводов 8а (8b) в каждой секции равно номеру секции, а электромеханические приводы 8а (8b) идентичны по мощности и по конструкции для тех рулевых поверхностей, которые выполняют, по меньшей мере, одну из функций курса, тангажа или крена.
Первая секция (1.1, 3.1, 4.1) разделенной рулевой поверхности любой из функций курса, тангажа или крена может иметь два следящих электромеханических привода 8а (8b), назначенная номинальная мощность каждого из которых равна 0,5-0,7 номинальной мощности единственного следящего электромеханического привода 8а (8b) первой секции (1.1, 3.1,4.1).
В зависимости от заданного угла поворота секции рулевой поверхности выходной вал 10а электромеханического привода 8а совершает вращательное движение (фиг. 3-6), а выходное звено 10b электромеханического привода 8b совершает линейное перемещение (фиг. 7, 8), получаемое путем преобразования вращательного движения вала ротора 16 электродвигателя 15 в поступательное через кривошипно-шатунный механизм 19 (фиг. 5) или через шарико-винтовую передачу 20 (фиг. 8).
Каждая поверхность 6 (6.1, 6.2, 6.3) (фиг. 1) аэродинамического торможения также может иметь, по меньшей мере, один следящий электромеханический привод 8а (фиг. 3-6), выходной вал 10а которого совершает вращательное движение, или электромеханический привод 8b (фиг. 7, 8), выходное звено 10b которого совершает линейное перемещение.
Управление электромеханическими приводами 8а и 8b секций рулевых поверхностей для функций курса, тангажа или крена осуществляется через систему управления (фиг. 9), имеющую: блоки 21 управления следящими электромеханическими приводами 8а и 8b рулевых поверхностей 1, 3 или 4, выполняющих управление летными функциями соответственно курса, тангажа и крена и поверхностями 6, 7 аэродинамического торможения; блоки 22 управления электродвигателями 15 следящих электромеханических приводов 8а и 8b, соединенные интерфейсными шинами 23 с блоками 21 управления следящими электромеханическими приводами 8а и 8b рулевых поверхностей 1, 3, 4 и поверхностей 6, 7 аэродинамического торможения; по меньшей мере, один центральный блок 24 (компьютер, контроллер) управления рулевыми поверхностями 1, 3 или 4 каждой из функций соответственно курса, тангажа и крена и поверхностями 6, 7 аэродинамического торможения, соединенный интерфейсной шиной 23 с блоками 21 и 22 управления следящими электромеханическими приводами 8а и 8b и интерфейсной шиной 25 с бортовым компьютером 26; датчики 27 углового положения выходного вала 10а и выходного звена 10b соответственно каждого следящего электромеханического привода 8а или 8b, соединенные интерфейсными шинами 28 с блоками 21, 22 управления следящими электромеханическими приводами 8а и 8b; датчики 29 положения каждой секции рулевой поверхности 1, 3,4 и поверхностей 6, 7 аэродинамического торможения, соединенные интерфейсными шинами 30 с блоками 21, 22 управления следящими электромеханическими приводами 8а и 8b рулевых поверхностей.
Работа электромеханического привода системы рулевых поверхностей 1, 3, 4 и поверхностей 6 и 7 аэродинамического торможения со следящими электромеханическими приводами 8а или 8b описанных конструкций (фиг. 1-8) по управлению основными функциями курса, тангажа и крена при полете самолета включает следующие действия:
- пуск электромеханических приводов 8а и 8b, обеспечивающий начало вращения одной или нескольких секций рулевых поверхностей 1, 3, 4 и при необходимости поверхностей 6, 7 аэродинамического торможения по сигналам, подаваемым центральным блоком 24 управления (фиг. 9) в блоки 21 и 22 управления в соответствии с законами управления и алгоритмами, заложенными в программы управления; разгон секций рулевых поверхностей с необходимым ускорением до установившейся скорости движения по программе, задаваемой центральным блоком 24 управления и выдаваемыми датчиками 27, 29 сигналам, преобразуемым в блоках 21, 22 управления; изменение скорости вращения секций рулевых поверхностей при отслеживании углового положения выходного вала 10а и выходного звена 10b соответственно электромеханических приводов 8а и 8b и углового положения секций рулевых поверхностей по сигналам, поступающим от центрального блока 24 управления и преобразуемым в блоках 21, 22 управления; изменение направления вращения роторов 16 электродвигателей 15, выходного вала 10а и выходного звена 10b и секций рулевых поверхностей 1, 3, 4 и поверхностей 6, 7 аэродинамического торможения по сигналам, поступающим от центрального блока 24 управления и преобразуемым в блоках 21, 22 управления; разгон электромеханического привода 8а или 8b с заданным ускорением до установившейся скорости движения одной или нескольких секций рулевых поверхностей 1, 3, 4 при выполнении функций соответственно курса, тангажа и крена, и поверхностей 6, 7 аэродинамического торможения осуществляется путем регулирования частоты синхронного вращения вала 10а и звена 10b электроприводов соответственно 8а и 8b.
Для уменьшения нагрузки на оперение самолета с закрепленными на них рулевыми поверхностями при отказе или выходе из строя, по меньшей мере, одного из электромеханических приводов 8a или 8b, он выводится из зацепления, например, пиропатроном 31 (фиг. 3, 4, 6) [патент RU №2522638], по команде, подаваемой от центрального блока 24 управления на блок 21 и 22 управления, после чего все следящие электромеханические приводы 8а, 8b могут продолжать работу при уменьшении суммарной мощности электромеханического привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕСА ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583535C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2011 |
|
RU2544251C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583843C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОВОРОТА НОСОВОЙ ОПОРЫ ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583518C1 |
| Электромеханический привод гребного винта судна | 2015 |
|
RU2622175C1 |
| СИСТЕМА РУЛЕВЫХ ПРИВОДОВ ТРАНСПОРТНОГО САМОЛЕТА | 2016 |
|
RU2654654C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ПРИБОР ЛОГИЧЕСКОЙ ИНДИКАЦИИ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ В ПРОСТРАНСТВЕ (ВАРИАНТЫ) | 2006 |
|
RU2331848C2 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
Изобретение относится к области авиации, а именно к системам рулевых поверхностей для управления основными летными функциями самолетов с помощью электромеханических приводов. Система рулевых поверхностей содержит разделенные на секции рулевые поверхности (РП), служащие для управления летными функциями и соединенные со следящими электромеханическими приводами (ЭМП); блоки управления (БУ) следящих ЭМП РП; БУ электродвигателями следящих ЭМП; центральный БУ; датчики углового положения каждого выходного вала следящего ЭМП; датчики положения каждой секции РП. Наиболее удаленная от продольной оси самолета первая секция имеет наименьшую площадь, а каждая последующая секция по направлению к продольной оси самолета имеет площадь, равную произведению площади первой секции на порядковый номер секции. Каждый электродвигатель ЭМП каждой секции РП является бесколлекторным вентильным электродвигателем постоянного тока. ЭМП имеет соединенный с валом ротора электродвигателя волновой многоступенчатый редуктор с телами вращения с передаточным отношением, выбираемым из интервала 500...4000. Достигается равномерное распределение нагрузок, воспринимаемых силовым набором оперения. 12 з.п. ф-лы, 9 ил.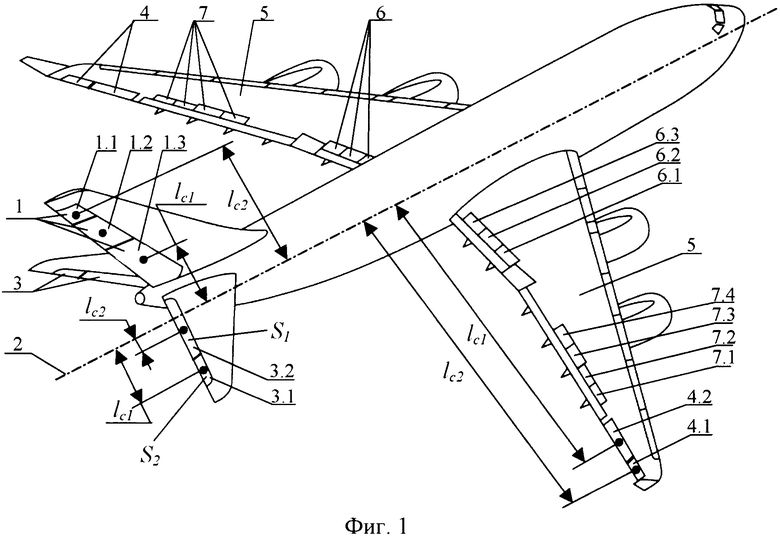
1. Система рулевых поверхностей с электромеханическими приводами для управления основными летными функциями самолета, содержащая разделенные на секции рулевые поверхности, расположенные выше продольной оси самолета, служащие для управления летными функциями курса, и расположенные слева и справа от продольной оси самолета, служащие для управления летными функциями тангажа и крена; по меньшей мере один следящий электромеханический привод, закрепленный на неподвижном элементе силового набора оперения, соединенный с каждой из секций разделенной рулевой поверхности, номинальная мощность которого зависит от площади приводимой им секции и выходные звенья которого совершают вращательное движение или линейное перемещение; поверхности аэродинамического торможения (тормозные щитки, интерцепторы), имеющие по меньшей мере один следящий электромеханический привод, выходные звенья которого совершают вращательное движение или линейное перемещение; блоки управления следящими электромеханическими приводами рулевых поверхностей, выполняющих управление летными функциями курса, тангажа и крена и поверхностями аэродинамического торможения; блоки управления электродвигателями следящих электромеханических приводов, соединенные интерфейсными шинами с блоками управления следящими электромеханическими приводами рулевых поверхностей и поверхностей аэродинамического торможения; по меньшей мере один центральный блок управления рулевыми поверхностями каждой из функций курса, тангажа и крена и поверхностями аэродинамического торможения, соединенный интерфейсными шинами с блоками управления следящими электромеханическими приводами и с бортовым компьютером; датчики углового положения выходного вала каждого следящего электромеханического привода, соединенные интерфейсными шинами с блоками управления следящими электромеханическими приводами; датчики положения каждой секции рулевой поверхности и поверхностей аэродинамического торможения, соединенные интерфейсными шинами с блоками управления следящими электромеханическими приводами рулевых поверхностей, отличающаяся тем, что рулевые поверхности курса, тангажа и крена разделены на несколько секций так, что наиболее удаленная от продольной оси самолета первая секция имеет наименьшую площадь, равную полной площади рулевой поверхности, поделенной на сумму ряда целых чисел от единицы до количества секций в рулевой поверхности, а каждая секция, следующая за первой секцией рулевой поверхности, по направлению к продольной оси самолета, имеет площадь, равную произведению площади первой секции на порядковый номер секции, при этом каждый электродвигатель следящего электромеханического привода каждой секции рулевых поверхностей является бесколлекторным вентильным электродвигателем постоянного тока с постоянными магнитами с частотой вращения ротора электродвигателя, выбираемой из интервала 6000…60000 мин-1, а следящий электромеханический привод имеет соединенный с валом ротора электродвигателя волновой многоступенчатый редуктор с телами вращения с передаточным отношением, выбираемым из интервала 500…4000.
2. Система рулевых поверхностей по п. 1, отличающаяся тем, что бесколлекторный вентильный электродвигатель следящего электромеханического привода имеет частоту вращения вала ротора, выбираемую из интервала 26000…60000 мин-1, а соединенный с валом ротора электродвигателя волновой редуктор с телами вращения имеет две или три ступени с передаточным отношением, выбираемым из интервала 1000…4000.
3. Система рулевых поверхностей по п. 1, отличающаяся тем, что номинальная мощность одного или нескольких следящих электромеханических приводов каждой секции рулевых поверхностей, следующей после первой секции, определяется в зависимости от номинальной мощности следящего электромеханического привода первой секции по формуле
Ni=i⋅N1,
где i - номер секции рулевой поверхности;
N1 и Ni - соответственно мощности 1-й и i-й секций.
4. Система рулевых поверхностей по п. 3, отличающаяся тем, что бесколлекторный вентильный электродвигатель следящего электромеханического привода имеет частоту вращения вала ротора, выбираемую из интервала 26000…60000 мин-1, а соединенный с валом ротора электродвигателя волновой редуктор с телами вращения имеет две или три ступени с передаточным отношением, выбираемым из интервала 1000…4000.
5. Система рулевых поверхностей по п. 1, отличающаяся тем, что количество следящих электромеханических приводов в секциях рулевых поверхностей, следующих по направлению к оси самолета, равно порядковому номеру секции, при этом электромеханические приводы являются идентичными, а номинальная мощность каждого следящего электромеханического привода каждой секции рулевых поверхностей равна номинальной мощности электромеханического привода первой секции рулевой поверхности.
6. Система рулевых поверхностей по п. 5, отличающаяся тем, что первая секция рулевых поверхностей имеет два следящих электромеханических привода, назначенная номинальная мощность каждого из которых равна 0,5-0,7 номинальной мощности электромеханического привода при одном следящем электромеханическом приводе первой секции.
7. Система рулевых поверхностей по п. 5, отличающаяся тем, что каждый бесколлекторный вентильный электродвигатель имеет частоту вращения вала ротора, выбираемую из интервала 26000…60000 мин-1, а соединенный с валом ротора волновой редуктор с телами вращения имеет две или три ступени с передаточным отношением, выбираемым из интервала 1000…4000.
8. Система рулевых поверхностей по п. 1, отличающаяся тем, что следящие электромеханические приводы секций рулевых поверхностей, выполняющих управление летными функциями курса, тангажа и крена, имеющих равные площади, являются идентичными.
9. Система рулевых поверхностей по п. 1, отличающаяся тем, что следящие электромеханические приводы поверхностей аэродинамического торможения, имеющих равные площади, являются идентичными.
10. Система рулевых поверхностей по пп. 1-9, отличающаяся тем, что следящие электромеханические приводы секций рулевых поверхностей, служащие для управления, по меньшей мере, одной из летных функций курса, тангажа и крена, являются следящими электромеханическими приводами вращательного движения.
11. Система рулевых поверхностей по пп. 1-9, отличающаяся тем, что следящие электромеханические приводы секций рулевых поверхностей, служащие для управления по меньшей мере одной из летных функций курса, тангажа и крена, являются следящими электромеханическими приводами линейного перемещения.
12. Система рулевых поверхностей по пп. 1-9, отличающаяся тем, что следящие электромеханические приводы управления поверхностями аэродинамического торможения являются электромеханическими приводами вращательного движения.
13. Система рулевых поверхностей по пп. 1-9, отличающаяся тем, что следящие электромеханические приводы управления поверхностями аэродинамического торможения являются электромеханическими приводами линейного перемещения.
| ХРАНЕНИЯ И ТРАНСПОРТИРОВКИ РЫБЫ | 0 |
|
SU254251A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ И ДОЗИРОВАНИЯ СЫПУЧЕГОМАТЕРИАЛА | 0 |
|
SU252646A1 |
| US 9045220 B2, 02.06.2015 | |||
| US 2070817 A2, 17.06.2009. | |||

