Изобретение относится к авиастроению, а именно к электроприводам колес шасси летательных аппаратов, позволяющим их самостоятельное движение по территории аэродрома.
Известен электропривод пары колес шасси самолета (заявка WO №2011/134503 от 28.04.2010, RU №2529558 от 28.04.2010), включающий два последовательно расположенных, объединенных в тандем электродвигателя, выходной вал которых, перпендикулярный оси колес, соединяется зубчатыми венцами колес через двухступенчатый редуктор, одна из ступеней которого включает коническую зубчатую передачу. Такое расположение электродвигателей увеличивает высоту шасси самолета.
Известна конструкция электропривода колеса шасси летательного аппарата (патент US №4659039 от 29.07.1985, ПМ RU №116719 U1 от 08.02.2012, US №2015/0034761 от 28.07.2014). Электропривод содержит управляемый электродвигатель, ротор которого связан с колесом шасси через линейную механическую трансмиссию и обгонную муфту. Недостаток - невозможность реверса колеса и ненадежность обгонной муфты вследствие ее возможного заклинивания.
Известно изобретение устройств для торможения и привода колеса шасси самолета (патенты US №8633665 от 08.01.2011, US №8579229 от 06.12.2011, заявка US №2013/0327884 от 19.01.2012), включающих электромеханический привод дискового тормоза; электромеханический привод колеса, состоящий, по меньшей мере, из одного электродвигателя и многоступенчатого редуктора, выходной вал которого соединяется муфтой с зубчатым венцом колеса.
Недостаток данных устройств в том, что они имеют пониженную надежность вследствие наличия управляемых соединительных устройств, расположенных между электроприводом с зубчатым редуктором и зубчатой передачей вращательного движения на обод колеса.
Известен электропривод колеса шасси самолета (патент US №8136761 от 06.08.2009), у которого зубчатый редуктор, соединяющий электродвигатель с колесом, является волновым.
Недостаток данного устройства в том, что зубчатые волновые редукторы не имеют высокой надежности при передаче большого крутящего момента.
Известно изобретение электромеханического привода дискового тормоза колеса шасси самолета (патент RU №2522643 от 25.07.2012), имеющего несколько электромеханических линейных двигателей, размещенных на опорном диске равномерно по окружности.
Известно эксцентриково-циклоидальное внутреннее или внешнее зацепление составных зубчатых профилей (патент RU №2385435 от 22.12.2008), состоящее из нескольких смещенных по фазе относительно друг друга дисков, каждый с циклоидальным венцом, взаимодействующим с эксцентриковым валом с числом эксцентриков, равным числу колес. Каждый эксцентрик является цилиндрическим и имеет подшипник, посаженный на эксцентрично смещенный участок общего вала. Вал может приводиться во вращение от любого двигателя, в том числе от электродвигателя.
Недостаток механического электродвигателя с редуктором, имеющим описанное зацепление, - сложность конструкции зацепления и пониженная надежность, обусловленная наличием одного электропривода вала с несколькими эксцентриками.
Известно изобретение электропривода вращения колеса и тормоза колеса самолета (патенты US №8579229 от 06.12.2011, US №8633605 от 08.01.2011, US №8444086 от 22.12.2010), состоящего из электродвигателей с редукторами, закрепленными на опорном диске на оси колеса так, что оси электроприводов параллельны оси колеса, выходные валы редукторов имеют средства зацепления с зубчатым венцом, установленным на ободе колеса, а также размещенных в ободе колеса пакета тормозных дисков с электромеханическим приводом, установленным на опорном диске.
Недостаток данного электропривода - в его пониженной надежности вследствие наличия управляемой электромагнитом зубчатой муфты, соединяющей зубчатый венец привода колеса с ободом колеса.
Известен электропривод колеса шасси самолета, состоящий из закрепленного на стойке шасси электродвигателя с шестерней на выходном валу и цепной передачей (патент US №8684300 B2 от 04.08.2010), установленной с возможностью ее ввода для взаимодействия с зубчатым венцом колеса для раскрутки колеса перед приземлением самолета и его вращения во время движения по рулежной дорожке. Цепная передача выводится из взаимодействия с зубчатым венцом колеса перед разгоном самолета для взлета. Такая передача движения от электродвигателя к колесу может включать зубчатый ремень (патент ЕР №2749494 от 31.12.2012) или зубчатые шестерни (патент ЕР №2527249 от 27.05.2011). Для ввода любой из зубчатых передач в зацепление или вывода из зацепления с зубчатым венцом колеса в конструкции имеется дополнительный электрический линейный или гидравлический привод, что усложняет конструкцию привода колеса и снижает его надежность. При таких приводах исключается использование малогабаритных следящих электроприводов с частотой вращения ротора электродвигателя до 100000 мин-1.
Известны устройство и система многодвигательного следящего безредукторного электропривода (заявка US №2014/0097859 от 12.12.2013), включающая:
- множество электродвигателей, каждый с датчиком углового положения вала и определителем скорости его вращения;
- устройства торможения на каждом из валов;
- множество блоков управления электродвигателями, каждый из которых обеспечивает подачу электрического тока каждому электродвигателю;
- микропроцессорные средства управления, образующие главный блок (контроллер), соединенный с множеством блоков управления электродвигателями и с датчиками положения валов электродвигателей, выдающий команды блокам управления электродвигателями в соответствии с заданными параметрами и положением валов.
В данной системе исключается соединение блоков управления с электродвигателями, не соответствующее заданному главным блоком управления.
В описании данного изобретения отсутствуют данные о режимах работы множества электродвигателей на общий вал.
Известен многодвигательный электропривод, включающий несколько одинаковых по мощности электроприводов (патент RU №2326488 от 24.10.2006). Каждый электропривод включает электродвигатель, передаточный механизм (мультипликатор момента), датчик скорости вращения и угла поворота ротора электродвигателя, установленный на электродвигателе или в передаточном механизме, задатчик текущей угловой скорости и регулятор скорости вращения ротора электродвигателя, соединенные с микропроцессорными средствами управления в виде блока векторного управления моментом электродвигателя и силового преобразователя, подключенного к обмоткам электродвигателя и соединенного с блоком векторного управления моментом электродвигателя. В данном многодвигательном электромеханическом приводе не раскрыта конструкция главного передаточного механизма от выходных валов электроприводов на главный вал, соединенный с объектом нагрузки, отсутствуют средства отсоединения множества электроприводов от главного вала для его свободного вращения.
Известно микропроцессорное управление электроприводами с вентильными двигателями, оснащенными датчиками положения ротора, соединенными с контроллером управления электроприводами [http://filearchive/reports-magazine/2012-26-1/199.pdf].
Каждый электродвигатель имеет транзисторный модуль, подсоединенный к контроллеру управления электроприводами, датчик тока и транзисторный ключ. Контроллер управления электроприводами обеспечивает прием и передачу команд с центрального микропроцессора, управляет направлением вращения электродвигателей и регулирует скорости их вращения.
В описании данного микропроцессорного управления отсутствует описание режимов работы множества электродвигателей на общий вал.
Известно описание системы управления вентильным индукторным электродвигателем (ВИД) [http://elmech.mpei.ac.ru/books/edu/SRM_design/index.html], включающей микропроцессор (МП). Сигналы от датчика положения ротора ВИД передаются в МП через устройство преобразования и согласования, которое приводит сигналы к виду и уровню, необходимому для нормальной работы МП. МП вырабатывает оптимальный алгоритм коммутации обмоток ВИД согласно программе, заложенной в МП.
Известен способ работы многодвигательного электропривода (патент US №7038421 от 17.06.2003), имеющего, по меньшей мере, два исполнительных электропривода, средства определения углового положения и угловой скорости ротора, датчики напряжения и тока, подаваемого к инверторам, микропроцессорные средства управления многодвигательным электроприводом.
Способ работы данного многодвигательного электропривода включает получение микропроцессорными средствами управления сигналов от датчиков о параметрах каждого из электроприводов, сравнение полученных сигналов с заданными и определение разности их величин, передача команд на управление инверторами для изменения параметров каждого из электроприводов на основе разности величин, полученных от датчиков и заданных параметров.
Известен способ работы многодвигательного электромеханического привода с вентильными электродвигателями с датчиками положения ротора (http://wvvw.kaskod.ru/product/motorsrm/srm_article01/) с микропроцессорным блоком управления, электронным коммутатором и электромеханическим преобразователем, включающий:
- пуск МЭМП по сигналам, подаваемым ГБУ в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программы управления;
- разгон и торможение приводимого объекта с необходимым ускорением по программе, задаваемой ГБУ и выдаваемым сигналам, преобразуемым в блоках управления следящих электроприводов;
- отслеживание углового положения главного выходного вала и приводимого объекта по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов;
- остановка всех электродвигателей и приводимого объекта в заданном ГБУ угловом положении валов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов;
- изменение направления вращения главного вала с приводимым объектом по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов.
В данном способе работы многодвигательного электромеханического привода не предусмотрена возможность свободного вращения главного вала с приводимым объектом.
Анализ технического уровня многодвигательных электромеханических приводов (МЭМП) показал, что в конструкции передаточного механизма "выходные валы следящих электроприводов - колесо шасси", в котором осуществляется суммирование моментов от электроприводов и приложение суммарного момента к колесу шасси, невозможен режим свободного вращения колеса без введения в конструкцию электроприводов дополнительных устройств - управляемых муфт или муфт свободного хода, отсоединяющих при необходимости валы электроприводов от зубчатого венца колеса или привода, отсоединяющего приводящий колесо механизм (зубчатый, цепной, с зубчатым ремнем и др.) от зубчатого венца колеса или привода, отсоединяющего приводящий колесо механизм (зубчатый, цепной, с зубчатым ремнем и др.) от приводимого звена колеса, что ведет к снижению функциональных возможностей и увеличению габаритных размеров многодвигательного электромеханического привода, исключает резервирование электроприводов и снижает их надежность.
Техническая задача изобретения - повышение функциональных возможностей и надежности путем резервирования многодвигательного электромеханического привода колеса шасси самолета.
Техническая задача решена в конструкции МЭМП колеса шасси самолета, состоящего из:
- нескольких одинаковых по мощности электродвигателей с редукторами, закрепленных на опорном диске, установленном на оси колеса так, что оси следящих электроприводов параллельны оси колеса, выходные валы редукторов имеют средства зацепления с установленным на ободе колеса зубчатым венцом; средств определения углового положения каждого ротора электродвигателя;
- пакета тормозных дисков, размещенных в ободе колеса шасси, и установленных на опорном диске нескольких следящих линейных электроприводов;
- датчиков положения нажимных плунжеров линейных следящих электроприводов дискового тормоза;
- датчика углового положения колеса;
- блоков управления следящими электроприводами;
- главного блока управления многодвигательным электромеханическим приводом, соединенного интерфейсной шиной с блоками управления электродвигателями и датчиками, при этом
- каждый электродвигатель следящего электропривода является бесколлекторным, постоянного тока, с возбуждением от постоянных магнитов;
- количество следящих электроприводов не менее трех;
- редуктор каждого следящего электропривода является волновым с телами вращения;
- установленные на выходных валах редукторов средства зацепления являются цилиндрическими эксцентриками, имеющими линию симметрии, с закрепленными на них подшипниками качения, взаимодействующими с зубьями цилиндрического зубчатого колеса, сформированными циклоидальной поверхностью, образующими эксцентриково-циклоидальное зацепление, при этом оси выходных валов размещены на окружности, радиус которой определяется по зависимости:
Re=Rmax-e±rп,
где Re - радиус окружности, на которой размещены оси валов следящих электроприводов, описанной относительно оси главного выходного вала;
Rmax - радиус окружности, на которой расположены вершины зубьев или впадины колеса внешнего или внутреннего эксцентриково-циклоидального зацепления;
е - эксцентриситет цилиндрического эксцентрика;
rп - внешний радиус подшипника качения, установленного на цилиндрическом эксцентрике;
+rп - для внешнего эксцентриково-циклоидального зацепления;
-rп - для внутреннего эксцентриково-циклоидального зацепления;
выходной вал каждого следящего электропривода имеет датчик углового положения, соединенный интерфейсной шиной с блоком управления соответствующего следящего электропривода и с главным блоком управления.
Так как при рулежке по взлетно-посадочной полосе скорость самолета находится в интервале 40-20 км/ч, а частота вращения колеса при такой скорости самолета составляет 300-150 мин-1, то при частоте вращения ротора электродвигателя, находящейся в интервале 7000…100000 мин-1, для снижения частоты вращения выходного вала электропривода волновой редуктор с телами вращения имеет от одной до трех ступеней.
Для увеличения мощности электропривода при уменьшенных габаритах он имеет четыре следящих электропривода колеса, закрепленные на неподвижном опорном диске попарно на осевых линиях, расположенных под углом ±45° к вертикали на противоположных сторонах от оси диска, и четыре следящих линейных электропривода дискового тормоза, два из которых расположены на вертикальной оси, а два - на горизонтальной оси на противоположных сторонах от оси диска.
В зависимости от габаритов и массы самолета МЭМП может быть установлен на одном или двух колесах основной или носовой опоры шасси самолета или на каждом из колес опор шасси самолета.
Для легких самолетов МЭМП может быть установлен, по меньшей мере, на одном колесе левой и правой основных опор шасси самолета.
Для тяжелых самолетов МЭМП установлен на каждом колесе основных и носовой опор шасси самолета.
Преимущества МЭМП проявляются при описанном ниже способе работы МЭМП колеса шасси самолета, включающем:
- ввод следящих электроприводов в зацепление с зубчатым колесом по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов;
- пуск следящих электроприводов для раскрутки колеса перед посадкой по сигналам, поступающим в ГБУ от системы управления самолетом (СУС) и от ГБУ - в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программу управления;
- вывод следящих электроприводов из зацепления с колесом, осуществляемый по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов;
- вращение колеса после касания взлетно-посадочной полосы и до снижения скорости самолета до 40-20 км/ч;
- пуск следящих электроприводов после посадки самолета по сигналам, поступающим в ГБУ от системы управления самолетом и от ГБУ - в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программу управления;
- разгон, установившееся движение и торможение колес при рулежке по программе, задаваемой ГБУ и выдаваемым сигналам, преобразуемым в блоках управления следящих электроприводов, при отслеживании углового положения колеса и выходных валов следящих электроприводов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов;
- вывод из зацепления с зубчатым венцом колеса и остановку всех следящих электроприводов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов;
- торможение колеса самолета до полной остановки;
- изменение направления вращения колеса самолета по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов, при этом
- вывод следящих электроприводов из зацепления с колесом до занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью каждого вала следящих электроприводов, и остановка всех следящих электроприводов для буксировки самолета осуществляются по сигналам от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ;
- пуск следящих электроприводов после посадки самолета и достижения скорости 40-20 км/ч осуществляется по сигналу, поступающему в ГБУ на определение углового положения выходных валов электроприводов и последующее формирование и подачу от блоков управления управляющих сигналов для установки каждого из выходных валов поворотом в заданное взаимное угловое положение линий симметрии цилиндрических эксцентриков в процессе ввода в зацепление с зубьями, образованными циклоидальной поверхностью зубчатого колеса;
- разгон, установившееся движение и торможение колеса самолета осуществляются при поддержании заданного взаимного углового положения линий симметрии эксцентриков всех следящих электроприводов в соответствии с алгоритмом, заложенным в программе ГБУ;
- торможение колеса самолета до полной остановки осуществляется включением всех линейных электроприводов дискового тормоза по сигналам, поступающим от ГБУ и преобразуемым в блоках управления линейных электроприводов после вывода следящих электроприводов из зацепления с зубчатым колесом по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ путем последующего поворота выходных валов для занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью каждого выходного вала и остановки всех следящих электроприводов;
- ввод в зацепление с колесом всех следящих электроприводов и их остановка при заданном взаимном угловом положении линий симметрии цилиндрических эксцентриков осуществляется по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ.
Для уменьшения износа шин перед посадкой самолета осуществляется раскрутка колеса (колес) пуском следящих электроприводов по сигналу, поступающему в ГБУ на определение углового положения выходных валов электроприводов, формированием и подачей от блоков управления последовательности управляющих сигналов для поворота каждого из выходных валов в заданное взаимное угловое положение линий симметрии цилиндрических эксцентриков и их ввода в зацепление с зубьями, образованными циклоидальной поверхностью зубчатого колеса.
Достижение технического эффекта - повышение надежности МЭМП колеса шасси самолета - обеспечивается следующей совокупностью отличительных признаков:
для МЭМП:
- каждый электродвигатель следящего электропривода является бесколлекторным, постоянного тока, с возбуждением от постоянных магнитов;
- количество следящих электроприводов не менее трех;
- редуктор каждого следящего электропривода является волновым с телами вращения;
- установленные на выходных валах редукторов средства зацепления являются цилиндрическими эксцентриками, имеющими линию симметрии, с закрепленными на них подшипниками качения, взаимодействующими с зубьями цилиндрического зубчатого колеса, сформированными циклоидальной поверхностью, образующими эксцентриково-циклоидальное зацепление, при этом оси выходных валов размещены на окружности, радиус которой определяется по зависимости:
Re=Rmax-e±rп;
- выходной вал каждого следящего электропривода имеет датчик углового положения, соединенный интерфейсной шиной с блоком управления соответствующего следящего электропривода и с главным блоком управления.
Так как при рулежке по взлетно-посадочной полосе скорость самолета находится в интервале 40-20 км/ч, а частота вращения колеса при такой скорости самолета составляет 300-150 мин-1, то при частоте вращения ротора электродвигателя, находящейся в интервале 7000…100000 мин-1, для снижения частоты вращения выходного вала электропривода волновой редуктор с телами вращения имеет от одной до трех ступеней.
Для увеличения мощности электропривода при уменьшенных габаритах он имеет четыре следящих электропривода колеса, закрепленные на неподвижном опорном диске попарно на осевых линиях, расположенных под углом ±45° к вертикали на противоположных сторонах от оси диска, и четыре следящих линейных электропривода дискового тормоза, два из которых расположены на вертикальной оси, а два - на горизонтальной оси на противоположных сторонах от оси диска.
В зависимости от габаритов и массы самолета МЭМП может быть установлен на одном или двух колесах основной или носовой опоры шасси самолета или на каждом из колес опор шасси самолета.
Для легких самолетов МЭМП может быть установлен, по меньшей мере, на одном колесе левой и правой основных опор шасси самолета.
Для тяжелых самолетов МЭМП установлен на каждом колесе основных и носовой опор шасси самолета.
Для способа работы МЭМП:
- вывод следящих электроприводов из зацепления с колесом до занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью каждого вала следящих электроприводов, и остановка всех следящих электроприводов для буксировки самолета осуществляются по сигналам от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ;
- пуск следящих электроприводов после посадки самолета и достижения скорости 40-20 км/ч осуществляется по сигналу, поступающему в ГБУ на определение углового положения выходных валов электроприводов и последующее формирование и подачу от блоков управления управляющих сигналов для установки каждого из выходных валов поворотом в заданное взаимное угловое положение линий симметрии цилиндрических эксцентриков в процессе ввода в зацепление с зубьями, образованными циклоидальной поверхностью зубчатого колеса;
- разгон, установившееся движение и торможение колеса самолета осуществляются при поддержании заданного взаимного углового положения линий симметрии эксцентриков всех следящих электроприводов в соответствии с алгоритмом, заложенным в программе ГБУ;
- торможение колеса самолета до полной остановки осуществляется включением всех линейных электроприводов дискового тормоза по сигналам, поступающим от ГБУ и преобразуемым в блоках управления линейных электроприводов после вывода следящих электроприводов из зацепления с зубчатым колесом по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ путем последующего поворота выходных валов для занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью каждого выходного вала и остановки всех следящих электроприводов;
- ввод в зацепление с колесом всех следящих электроприводов и их остановка при заданном взаимном угловом положении линий симметрии цилиндрических эксцентриков осуществляется по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ.
Для уменьшения износа шин перед посадкой самолета осуществляется раскрутка колеса (колес) пуском следящих электроприводов по сигналу, поступающему в ГБУ на определение углового положения выходных валов электроприводов, формированием и подачей от блоков управления последовательности управляющих сигналов для поворота каждого из выходных валов в заданное взаимное угловое положение линий симметрии цилиндрических эксцентриков и их ввода в зацепление с зубьями, образованными циклоидальной поверхностью зубчатого колеса.
Данная совокупность отличительных признаков не обнаружена в ходе проведенного патентно-информационного поиска, следовательно, изобретение соответствует критерию «новизна».
Данная совокупность отличительных признаков не следует явно из уровня техники, поэтому изобретение соответствует критерию «изобретательский уровень».
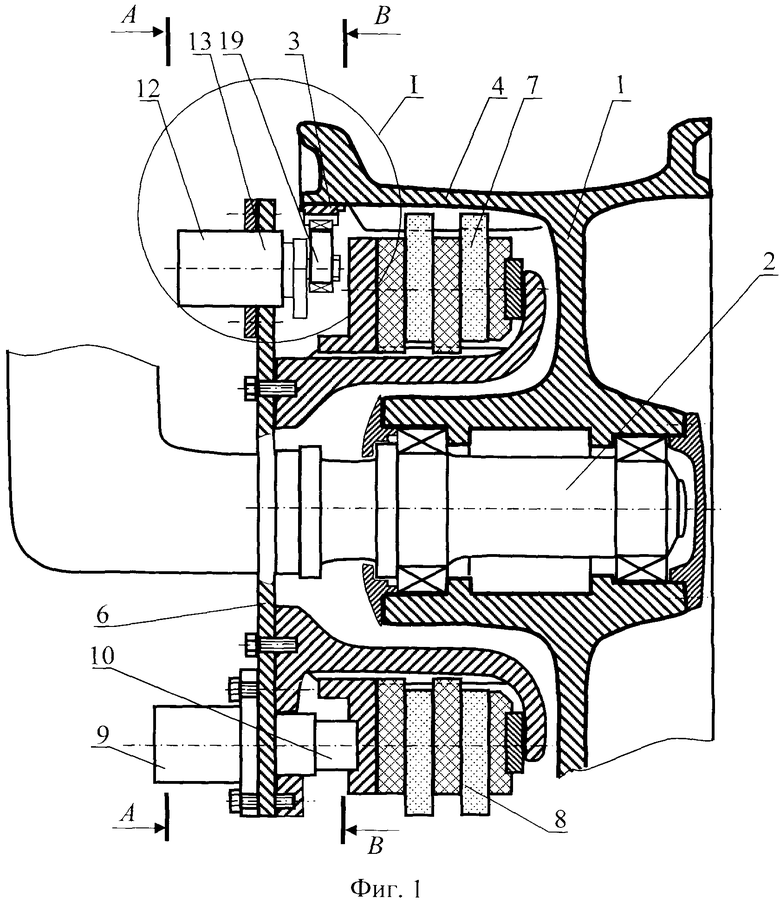
На фиг. 1 показан МЭМП колеса шасси самолета.
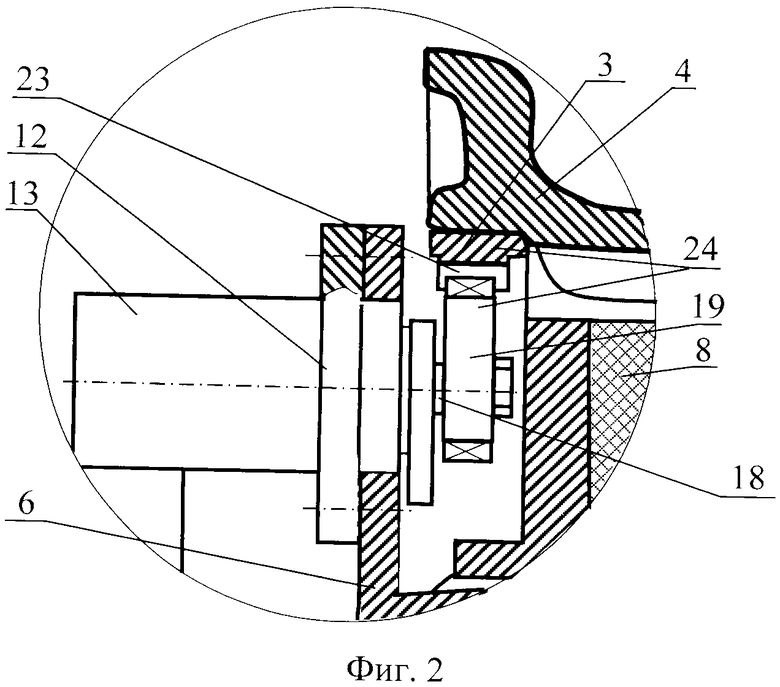
На фиг. 2 - фрагмент I на фиг. 1 для внутреннего эксцентриково-циклоидального зацепления.
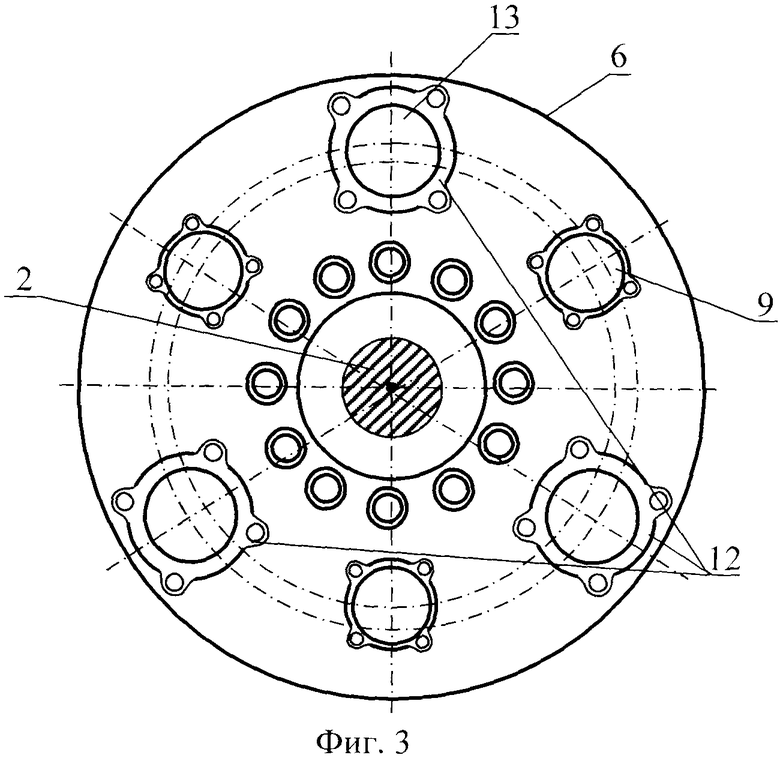
На фиг. 3 - сечение А-А на фиг. 1 с тремя электромеханическими приводами колеса и тремя электромеханическими приводами тормозных дисков.
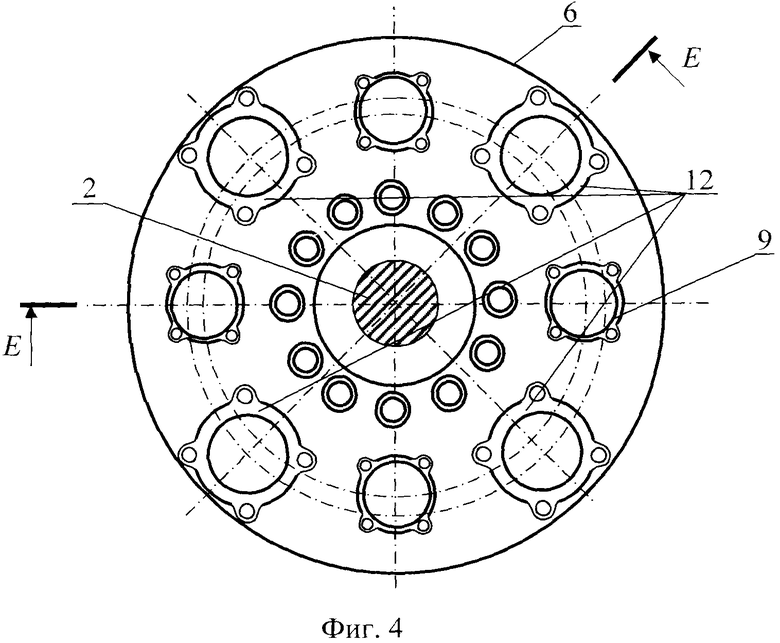
На фиг. 4 - сечение А-А на фиг. 1 с четырьмя электромеханическими приводами колеса и четырьмя электромеханическими приводами тормозных дисков.
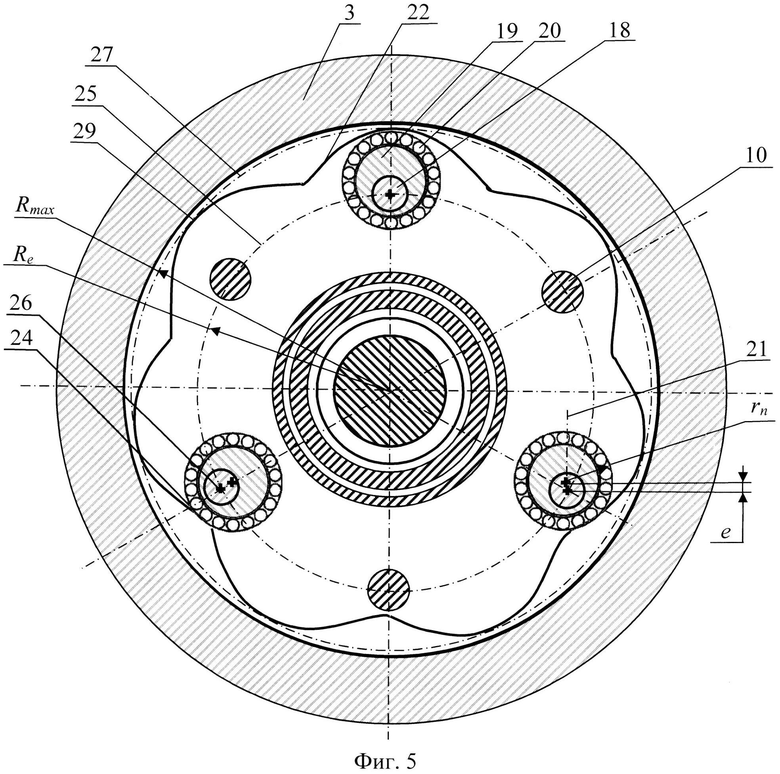
На фиг. 5 - сечение В-В на фиг. 1 при трех электромеханических приводах в состоянии зацепления эксцентриков с зубчатыми колесами.
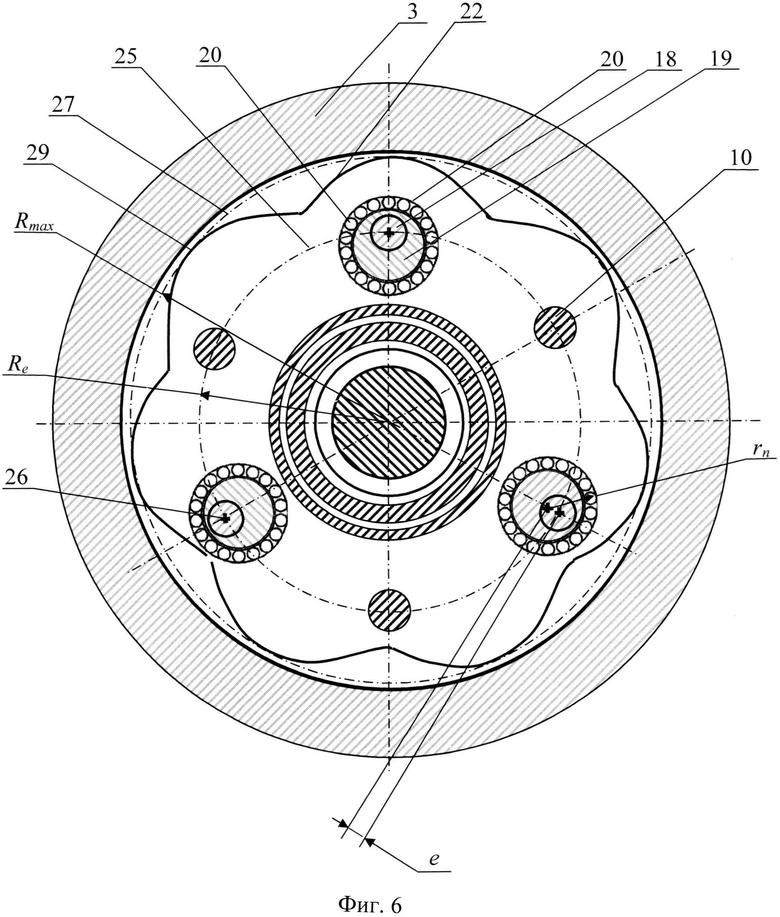
На фиг. 6 - сечение В-В на фиг. 1 при трех электромеханических приводах в состоянии эксцентриков, выведенных из зацепления с зубчатым колесом.
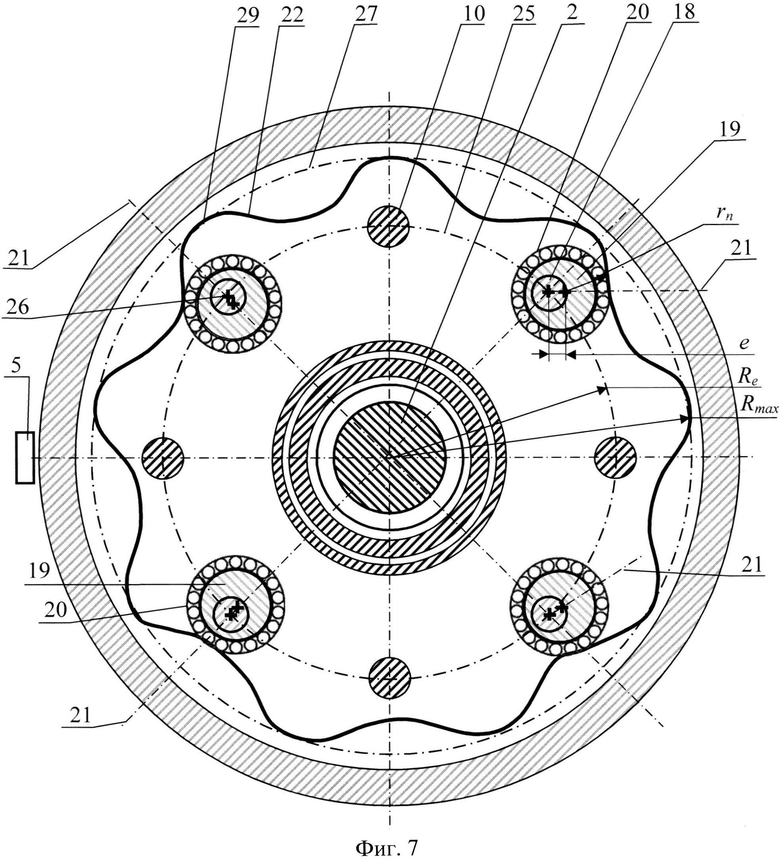
На фиг. 7 - сечение В-В на фиг. 1 при четырех электромеханических приводах в состоянии зацепления эксцентриков с зубчатыми колесами.
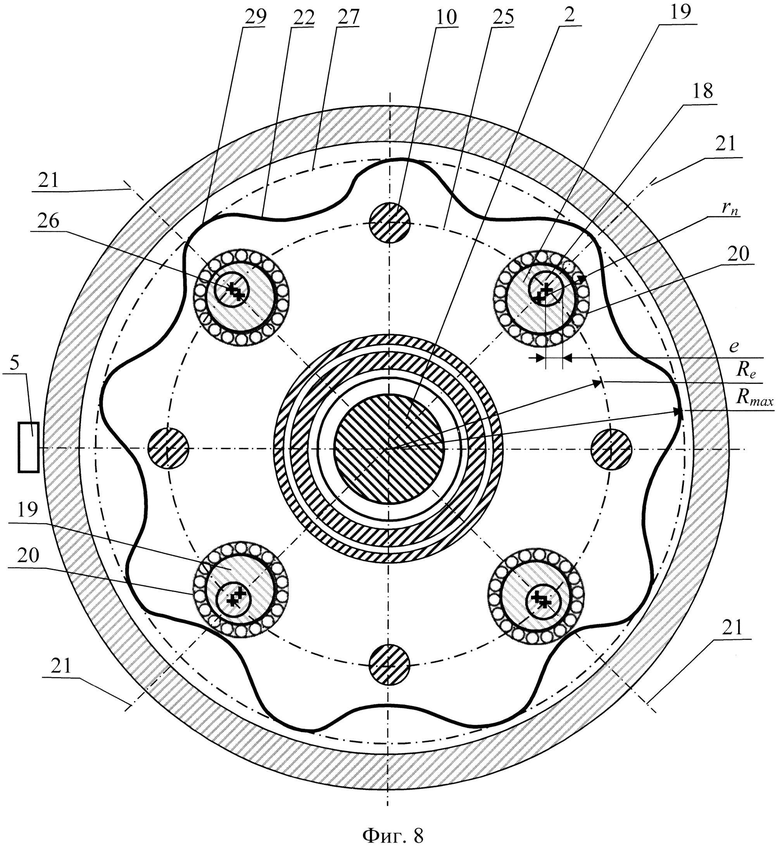
На фиг. 8 - сечение В-В на фиг. 1 при четырех электромеханических приводах в состоянии эксцентриков, выведенных из зацепления с зубчатым колесом.
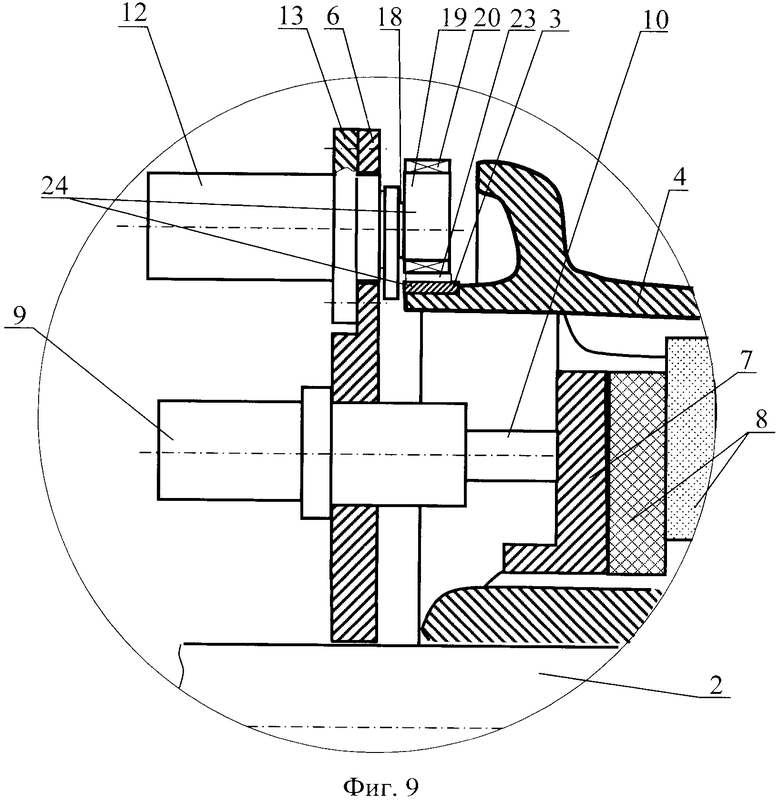
На фиг. 9 - фрагмент I на фиг. 1 для внешнего эксцентриково-циклоидального зацепления.
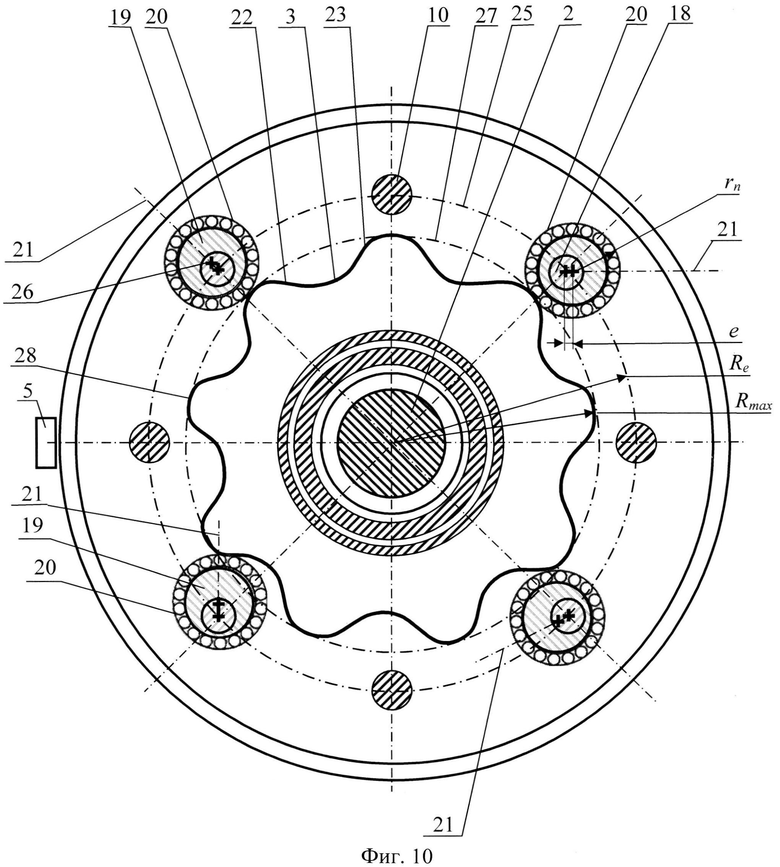
На фиг. 10 - сечение В-В на фиг. 1 для внешнего эксцентриково-циклоидального зацепления при четырех электромеханических приводах в состоянии зацепления эксцентриков с зубчатыми колесами.
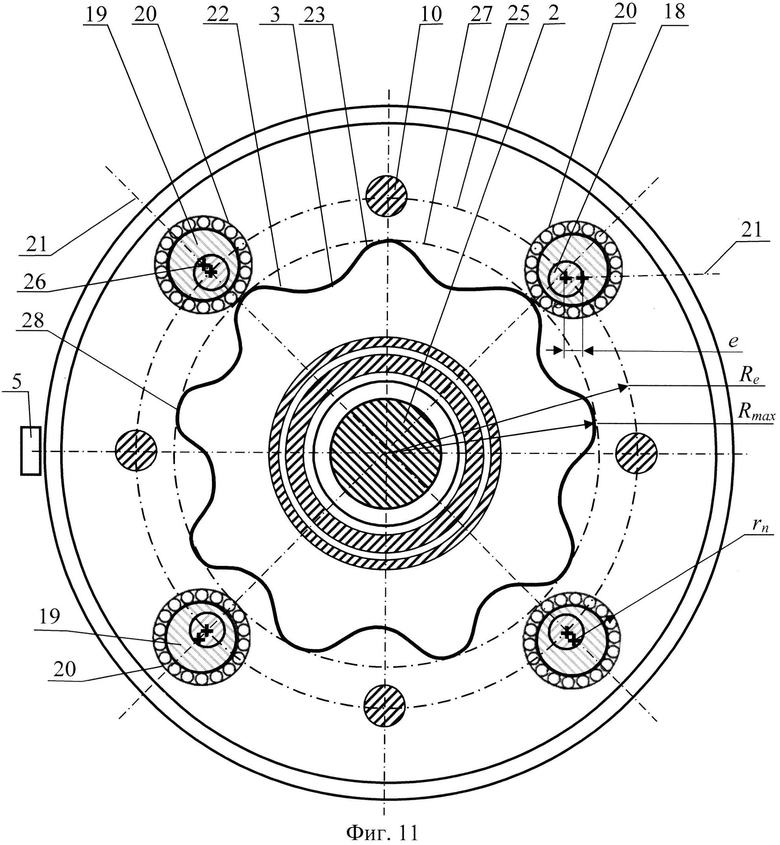
На фиг. 11 - сечение В-В на фиг. 1 для внешнего эксцентриково-циклоидального зацепления при четырех электромеханических приводах в состоянии эксцентриков, выведенных из зацепления с зубчатым колесом.
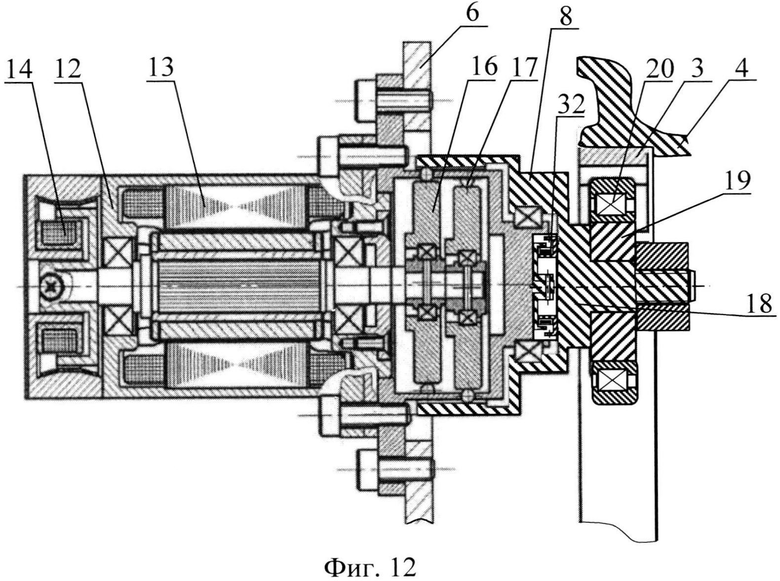
На фиг. 12 - пример конструкции электромеханического привода колеса с волновым редуктором с телами вращения.
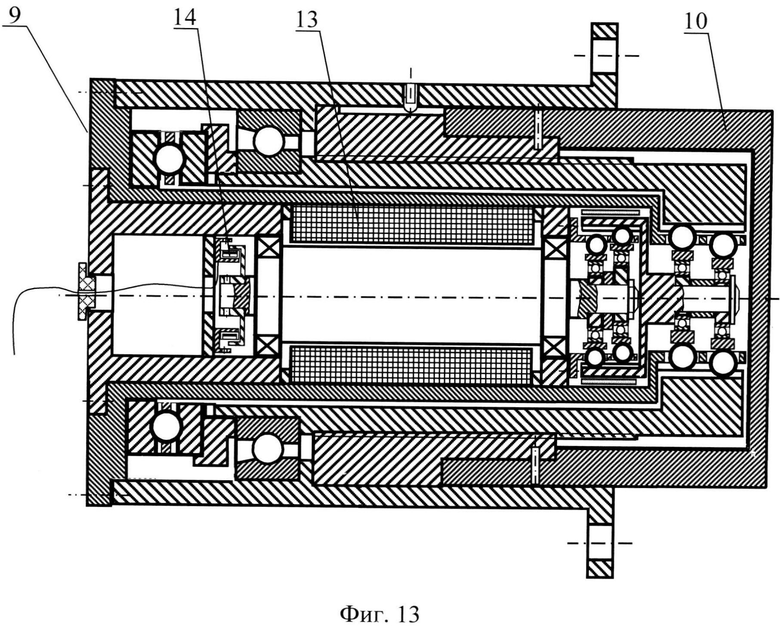
На фиг. 13 - пример конструкции электромеханического привода с двухступенчатым редуктором с телами вращения для тормозных дисков колеса.
На фиг. 14 - пример конструкции электромеханического привода двух колес, расположенных на одной опоре шасси.
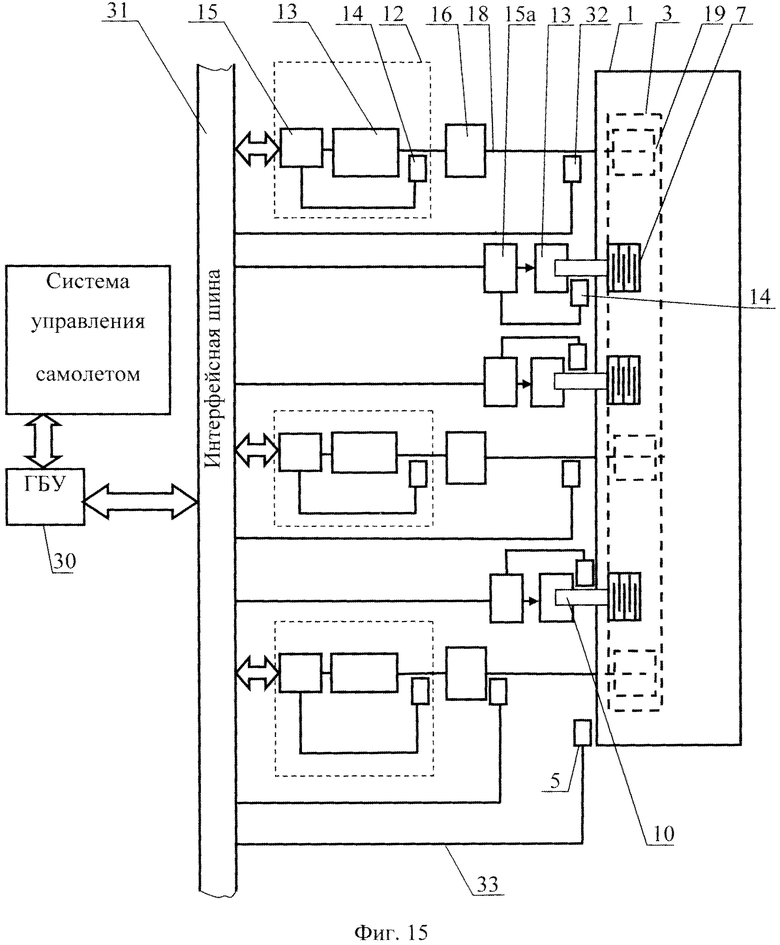
На фиг. 15 - блок-схема системы управления МЭМП, включающей блоки управления электродвигателями и главный блок управления.
Многодвигательный электромеханический привод колеса 1 шасси самолета (фиг. 1-15), имеющего ось 2 колеса 1 (фиг. 1, 2, 12, 14), зубчатый венец 3, закрепленный на ободе 4 колеса; датчик 5 (фиг. 15) углового положения колеса 1; закрепленный на оси 2 колеса 1 опорный диск 6 и установленный на нем дисковый тормоз 7, тормозные диски 8 которого размещены в ободе 4 колеса 1 с возможностью движения в осевом направлении; установленные на опорном диске 6 несколько линейных следящих электроприводов 9 (фиг. 13) с нажимными плунжерами 10, взаимодействующими с тормозными дисками 8, и с датчиками 11 (фиг. 15) положения нажимных плунжеров 10; включает
- не менее трех следящих электроприводов 12 (фиг. 3, 5, 6), закрепленных на опорном диске 6 параллельно оси 2 колеса 1, каждый из которых состоит из одинаковых по мощности бесколлекторных, постоянного тока, с возбуждением от постоянных магнитов электродвигателей 13 (фиг. 12), имеющих датчики 14 углового положения ротора; блоки 15 (фиг. 15) управления следящими электроприводами 12; соединенные с валами электродвигателей 13 волновые редукторы 16 с телами вращения 17, отбалансированный выходной вал 18 каждого из которых имеет цилиндрический эксцентрик 19 (фиг. 5, 6, 10-12) с подшипником 20 качения, имеющий линию 21 симметрии и взаимодействующий со сформированными циклоидальной поверхностью 22 зубьями 23 зубчатого венца 3, образующего при взаимодействии с эксцентриками 19 эксцентриково-циклоидальную передачу 24 (фиг. 2), при этом оси выходных валов 18 размещены на окружности 25, радиус которой определяется по зависимости:
Re=Rmax-e±rп,
где Re - радиус окружности 25, на которой размещены оси 26 выходных валов 18 следящих электроприводов 12, описанной относительно оси 2 колеса 1;
Rmax - радиус окружности 27, на которой расположены вершины 28 зубьев 23 внешней эксцентриково-циклоидальной передачи (фиг. 10) или впадины 29 внутренней эксцентриково-циклоидальной передачи (фиг. 5);
е - эксцентриситет цилиндрического эксцентрика 19;
rп - внешний радиус подшипника 20 качения, установленного на цилиндрическом эксцентрике 19;
+rп - для внешнего эксцентриково-циклоидального зацепления (фиг. 10, 11);
- rп - для внутреннего эксцентриково-циклоидального зацепления (фиг. 5, 6, 7, 8);
- размещенный на шасси или в непосредственной близости от него главный блок 30 (фиг. 15) управления МЭМП, соединенный интерфейсной шиной 31 с блоками 15 управления электродвигателями 13 следящих электроприводов 12 и линейных электроприводов 9 дискового тормоза 7, с датчиком 32 (фиг. 13) углового положения выходного вала 18 каждого следящего электропривода 12 и интерфейсной шиной 33 (фиг. 15) с датчиком 5 углового положения колеса 1. Главный блок 30 управления может быть включен во внешнюю систему управления или получать команды от внешней системы управления.
При условии, что цилиндрический эксцентрик 19 выполняет функцию однозубой шестерни (фиг. 5, 6, 10, 11), передаточное отношение эксцентриково-циклоидальной передачи 24 равно числу зубьев 23 зубчатого венца 3, поэтому чем больше зубьев 23 имеет зубчатый венец 3 колеса 1, тем выше передаточное отношение эксцентриково-циклоидальной передачи 24.
При частоте вращения ротора электродвигателя 13, находящейся в интервале 7000…100000 мин-1, волновой редуктор 16 с телами вращения 17 имеет от одной до трех ступеней (фиг. 12), что позволяет при передаточном отношении эксцентриково-циклоидальной передачи 24, равном числу зубьев 23 на зубчатом венце 3, получить частоту вращения колеса 150-300 мин-1, достаточную для движения при рулежке самолета со скоростью 20-40 км/ч.
Для набора заданной мощности МЭМП при уменьшенных габаритах следящих электроприводов 12 с высокой частотой вращения роторов электродвигателей 13 имеет
- четыре следящих электропривода 12 колеса 1 (фиг. 4, 10, 11), закрепленные на опорном диске 6 попарно на осевой линии, расположенной под углом ±45° к вертикали на противоположных сторонах опорного диска 6, и
- четыре линейных следящих электропривода 9 (фиг. 4) дискового тормоза 7, два из которых расположены на вертикальной оси, а два - на горизонтальной оси на противоположных сторонах от оси опорного диска 6.
В зависимости от габаритов и массы самолета МЭМП может быть установлен на одном или двух колесах 1 (фиг. 14) основной или носовой опоры шасси самолета или на каждом из колес опор шасси самолета. На легких самолетах МЭМП может быть установлен, по меньшей мере, на одном колесе 1 каждой основной опоры шасси самолета, и, возможно, на колесе 1 передней опоры шасси самолета. На тяжелых самолетах МЭМП устанавливается на каждом колесе 1 шасси самолета.
Преимущества МЭМП колеса 1 шасси самолета проявляются при описанном ниже способе работы, включающем:
- ввод эксцентриков 19 следящих электроприводов 12 в зацепление с зубчатым венцом 3 колеса 1, осуществляемый для раскрутки колес 1 перед посадкой самолета, до начала рулежки после посадки или перед взлетом, по сигналу, поступающему в ГБУ 30 на определение углового положения выходных валов 18 следящих электроприводов 12 и последующее формирование и подачу от блоков 15 управляющих сигналов для установки каждого из выходных валов 18 поворотом в заданное взаимное угловое положение линий 21 симметрии цилиндрических эксцентриков 19 (фиг. 5, 7, 10) в процессе ввода в зацепление с зубьями 23, образованными циклоидальной поверхностью 22 зубчатого венца 3;
- вывод цилиндрических эксцентриков 19 следящих электроприводов 12 из зацепления с зубчатым венцом 3 колеса 1 до занятия центрами всех эксцентриков 19 положения на радиальных линиях, соединяющих ось зубчатого венца 3 с осью 26 каждого выходного вала 18 (фиг. 6, 8, 11) следящих электроприводов 12, и остановка всех следящих электроприводов 12 для буксировки самолета осуществляемый по сигналам от ГБУ 30, преобразуемым в блоках 15 в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ 30, осуществляемый перед взлетом и посадкой самолета на взлетно-посадочной полосе;
- свободное вращение колеса 1 после касания взлетно-посадочной полосы и до снижения скорости самолета до 40-20 км/ч (до скорости рулежки), последующий пуск следящих электроприводов 12 после достижения скорости рулежки и ввод эксцентриков 19 следящих электроприводов 12 в зацепление с зубчатым венцом 3 колеса 1 (фиг. 5, 7, 10) по сигналам, поступающим в ГБУ 30 (фиг. 15) от датчика 5 углового положения колеса 1, датчиков 14 углового положения выходных валов 18 и от системы управления самолетом, и от ГБУ 30 - в блоки 15 управления следящих электроприводов 12 в соответствии с алгоритмами, заложенными в программу управления;
- разгон, установившееся движение и торможение колес 1 при рулежке при поддержании заданного взаимного углового положения линий 21 симметрии эксцентриков 19 (фиг. 5, 7, 10) всех следящих электроприводов 12 в соответствии с алгоритмом, заложенным в программе ГБУ 30 и выдаваемым сигналам, преобразуемым в блоках 15 управления следящих электроприводов 12;
- вывод эксцентриков 19 из зацепления с зубчатым венцом 3 (фиг. 6, 8, 11) колеса 1 и остановку всех следящих электроприводов 12; по сигналам, поступающим от ГБУ 30 и преобразуемым в блоках 15 управления следящих электроприводов 12; последующее торможение колеса 1 самолета дисковым тормозом 7 для снижения скорости движения или до полной остановки по сигналам, поступающим из системы управления самолетом через ГБУ 30 и блоки 15а управления линейными электроприводами 9;
- изменение направления вращения колеса 1 при рулежке по сигналам, поступающим от ГБУ 30 и преобразуемым в блоках 15 управления следящих электроприводов 12,
- торможение колеса 1 самолета до полной остановки, осуществляемое включением всех линейных электроприводов 9 дискового тормоза 7 по сигналам, поступающим от ГБУ 30 и преобразуемым в блоках 15а управления линейных электроприводов 9 после вывода эксцентриков 19 следящих электроприводов 12 из зацепления с зубчатым венцом 3 путем последующего поворота выходных валов 18 для занятия центрами всех эксцентриков 19 (фиг. 6, 8, 11) положения на радиальных линиях, соединяющих ось зубчатого венца 3 с осью каждого выходного вала 18 и остановки всех следящих электроприводов 12 по сигналу от ГБУ 30 в соответствии с программой управления, задаваемой алгоритмом, заложенным в ГБУ 30.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583843C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОВОРОТА НОСОВОЙ ОПОРЫ ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583518C1 |
| Электромеханический привод гребного винта судна | 2015 |
|
RU2622175C1 |
| СИСТЕМА РУЛЕВЫХ ПОВЕРХНОСТЕЙ С ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРИВОДАМИ ДЛЯ УПРАВЛЕНИЯ ОСНОВНЫМИ ЛЕТНЫМИ ФУНКЦИЯМИ САМОЛЕТА | 2016 |
|
RU2622321C1 |
| УСТРОЙСТВО И СПОСОБ РАБОТЫ ПРИВОДА УБОРКИ-ВЫПУСКА ШАССИ САМОЛЕТА | 2013 |
|
RU2535771C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА С УПРУГИМ ЗАЦЕПЛЕНИЕМ - ЭП ПЦР-У | 2007 |
|
RU2358375C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ПРЕДКРЫЛКА САМОЛЕТА | 2012 |
|
RU2522635C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЗАКРЫЛКА САМОЛЕТА | 2012 |
|
RU2515014C2 |
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
Изобретение относится к авиастроению и касается электроприводов колес шасси. Многодвигательный электромеханический привод (МЭМП) колеса шасси состоит из нескольких электродвигателей с редукторами, пакета тормозных дисков, и нескольких следящих линейных электроприводов, блоков управления следящими электроприводами, главного блока управления МЭМП, соединенного интерфейсной шиной с блоками управления электродвигателями и датчиками. Каждый электродвигатель следящего электропривода бесколлекторный, постоянного тока, с возбуждением от постоянных магнитов. Редуктор каждого следящего электропривода волновой с телами вращения. Установленные на выходных валах редукторов средства зацепления являются цилиндрическими эксцентриками, имеющими линию симметрии, с закрепленными на них подшипниками качения, взаимодействующими с зубьями цилиндрического зубчатого колеса, сформированными циклоидальной поверхностью, образующими эксцентриково-циклоидальное зацепление. Выходной вал каждого следящего электропривода имеет датчик углового положения, соединенный интерфейсной шиной с блоком управления соответствующего следящего электропривода и с главным блоком управления (ГБУ). Достигается повышение функциональных возможностей и надежности путем резервирования МЭМП. 2 н. и 7 з.п. ф-лы, 15 ил.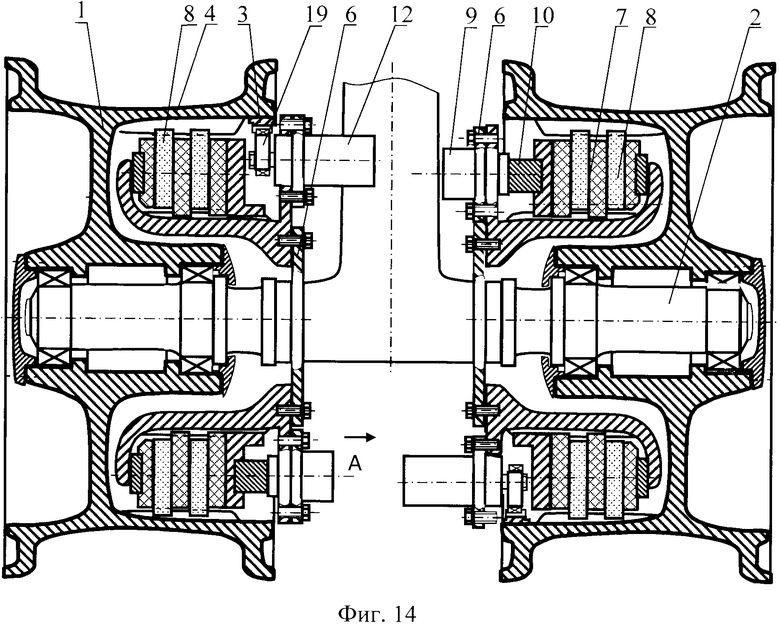
1. Многодвигательный электромеханический привод колеса шасси самолета, состоящий из нескольких одинаковых по мощности электродвигателей с редукторами, закрепленных на опорном диске, установленном на оси колеса так, что оси следящих электроприводов параллельны оси колеса, выходные валы редукторов имеют средства зацепления с установленным на ободе колеса зубчатым венцом, средств определения углового положения каждого ротора электродвигателя, пакета тормозных дисков, размещенных в ободе колеса шасси, и установленных на опорном диске нескольких следящих линейных электроприводов, датчиков положения нажимных плунжеров линейных следящих электроприводов дискового тормоза, датчика углового положения колеса, блоков управления следящими электроприводами, главного блока управления многодвигательным электромеханическим приводом, соединенного интерфейсной шиной с блоками управления электродвигателями и датчиками, отличающийся тем, что каждый электродвигатель следящего электропривода является бесколлекторным, постоянного тока, с возбуждением от постоянных магнитов, количество следящих электроприводов не менее трех, редуктор каждого следящего электропривода является волновым с телами вращения, установленные на выходных валах редукторов средства зацепления являются цилиндрическими эксцентриками, имеющими линию симметрии, с закрепленными на них подшипниками качения, взаимодействующими с зубьями цилиндрического зубчатого колеса, сформированными циклоидальной поверхностью, образующими эксцентриково-циклоидальное зацепление, при этом оси выходных валов размещены на окружности, радиус которой определяется по зависимости:
Re=Rmax-e±rп,
где Re - радиус окружности, на которой размещены оси валов следящих электроприводов, описанной относительно оси главного выходного вала,
Rmax - радиус окружности, на которой расположены вершины зубьев или впадины колеса внешнего или внутреннего эксцентриково-циклоидального зацепления,
e - эксцентриситет цилиндрического эксцентрика,
rп - внешний радиус подшипника качения, установленного на цилиндрическом эксцентрике,
+rп - для внешнего эксцентриково-циклоидального зацепления,
-rп - для внутреннего эксцентриково-циклоидального зацепления,
выходной вал каждого следящего электропривода имеет датчик углового положения, соединенный интерфейсной шиной с блоком управления соответствующего следящего электропривода и с главным блоком управления (ГБУ).
2. Многодвигательный электромеханический привод по п.1, отличающийся тем, что частота вращения ротора электродвигателя находится в интервале 7000…100000 мин-1, а волновой редуктор с телами вращения имеет от одной до трех ступеней.
3. Многодвигательный электромеханический привод по п.1, отличающийся тем, что он имеет четыре следящих электропривода колеса, закрепленные на неподвижном опорном диске попарно на осевых линиях, расположенных под углом ±45° к вертикали на противоположных сторонах от оси диска, и четыре следящих линейных электропривода дискового тормоза, два из которых расположены на вертикальной оси, а два - на горизонтальной оси на противоположных сторонах от оси диска.
4. Многодвигательный электромеханический привод по любому из пп.1-3, отличающийся тем, что он установлен, по меньшей мере, на одном колесе левой и правой основных опор шасси самолета.
5. Многодвигательный электромеханический привод по любому из пп.1-3, отличающийся тем, что он установлен на каждом колесе основных опор шасси самолета.
6. Многодвигательный электромеханический привод по любому из пп.1-3, отличающийся тем, что он установлен на одном или всех колесах носовой опоры шасси самолета.
7. Многодвигательный электромеханический привод по любому из пп.1-3, отличающийся тем, что он установлен на всех колесах носовой и основных опор шасси самолета.
8. Способ работы многодвигательного электромеханического привода колеса шасси самолета по п.1, включающий:
- ввод следящих электроприводов в зацепление с зубчатым колесом по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов,
- пуск следящих электроприводов для раскрутки колеса перед посадкой по сигналам, поступающим в ГБУ от системы управления самолетом (СУС) и от ГБУ - в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программу управления,
- вывод следящих электроприводов из зацепления с колесом, осуществляемый по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов,
- вращение колеса после касания взлетно-посадочной полосы и до снижения скорости самолета до 20-40 км/ч,
- пуск следящих электроприводов после посадки самолета по сигналам, поступающим в ГБУ от СУС и от ГБУ - в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программу управления,
- разгон, установившееся движение и торможение колес при рулежке по программе, задаваемой ГБУ и выдаваемым сигналам, преобразуемым в блоках управления следящих электроприводов, при отслеживании углового положения колеса и выходных валов следящих электроприводов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов,
- вывод из зацепления с зубчатым венцом колеса и остановку всех следящих электроприводов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов,
- торможение колеса самолета до полной остановки,
- изменение направления вращения колеса самолета по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов,
отличающийся тем, что
- вывод следящих электроприводов из зацепления с колесом до занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью каждого вала следящих электроприводов, и остановка всех следящих электроприводов для буксировки самолета осуществляются по сигналам от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ,
- пуск следящих электроприводов после посадки самолета и достижения скорости 20-40 км/ч осуществляется по сигналу, поступающему в ГБУ на определение углового положения выходных валов электроприводов и последующее формирование и подачу от блоков управления управляющих сигналов для установки каждого из выходных валов поворотом в заданное взаимное угловое положение линий симметрии цилиндрических эксцентриков в процессе ввода в зацепление с зубьями, образованными циклоидальной поверхностью зубчатого колеса,
- разгон, установившееся движение и торможение колеса самолета осуществляются при поддержании заданного взаимного углового положения линий симметрии эксцентриков всех следящих электроприводов в соответствии с алгоритмом, заложенным в программе ГБУ,
- торможение колеса самолета до полной остановки осуществляется включением всех линейных электроприводов дискового тормоза по сигналам, поступающим от ГБУ и преобразуемым в блоках управления линейных электроприводов после вывода следящих электроприводов из зацепления с зубчатым колесом по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ путем последующего поворота выходных валов для занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью каждого выходного вала и остановки всех следящих электроприводов,
- ввод в зацепление с колесом всех следящих электроприводов и их остановка при заданном взаимном угловом положении линий симметрии цилиндрических эксцентриков осуществляется по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ.
9. Способ по п.8, отличающийся тем, что раскрутка колеса перед посадкой самолета осуществляется пуском следящих электроприводов по сигналу, поступающему в ГБУ на определение углового положения выходных валов электроприводов, формированием и подачей от блоков управления последовательности управляющих сигналов для поворота каждого из выходных валов в заданное взаимное угловое положение линий симметрии цилиндрических эксцентриков и их ввода в зацепление с зубьями, образованными циклоидальной поверхностью зубчатого колеса.
| US 2014097859 A1, 10.04.2014 | |||
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ЭКСЦЕНТРИКОВО-ЦИКЛОИДАЛЬНОЕ ЗАЦЕПЛЕНИЕ СОСТАВНЫХ ЗУБЧАТЫХ ПРОФИЛЕЙ | 2008 |
|
RU2385435C1 |
| Машина для чесания пеньки | 1951 |
|
SU97471A2 |

