Изобретение относится к военной и специальной технике, а именно к системам загрузки, доставки, управления и обслуживания боевого роботизированного комплекса, предназначенного для ведения дистанционной работы в боевых условиях: сбора и передачи разведывательной информации, огневого прикрытия, обнаружения и огневого поражения различного вида целей.
Известен мобильный робототехнический комплекс (патент RU №2364500 С2, B25J 5/00, 20.08.2009 г.), принятый за прототип. Мобильный робототехнический комплекс включает в свой состав мобильный робот, интегрированный пост (пункт) дистанционного управления, систему двусторонней связи между постом и роботом и комплект дополнительного оборудования. В базовый комплект дополнительного оборудования входят различные устройства и механизмы, которыми оснащается робот, применительно к конкретной оперативной задаче. В этот комплект входят транспортная прицепная тележка, автомобильный эвакуатор (средство загрузки и доставки), комплект губок схвата различной конфигурации, кронштейны-держатели разрушителей взрывоопасных предметов и другие элементы. Собственно мобильный робот представляет собой самоходное телеуправляемое транспортное средство с электроприводом движителя и бортовыми источниками питания.
Недостатками прототипа являются:
- ограниченные функциональные возможности системы по мобильному перебазированию подвижного робота в различные точки дислокации;
- отсутствие достаточных средств для погрузочно-разгрузочных работ и транспортирования;
- низкая степень управляемости и неудобство в ее обеспечении.
Предлагаемым изобретением решается задача по повышению функциональных возможностей боевого роботизированного комплекса.
Технический результат, получаемый при осуществлении изобретения, заключается в создании системы обеспечения функционирования боевого роботизированного комплекса, обладающей достаточным составом функциональных средств для подготовки боевого роботизированного комплекса к выполнению задач по назначению, расширенными техническими возможностями, заключающимися в реализации функции мобильного перебазирования комплекса, удобстве в эксплуатации и управлении.
Указанный технический результат достигается тем, что в предлагаемой системе обеспечения функционирования боевого роботизированного комплекса, содержащей пункт дистанционного управления, комплект дополнительного оборудования, средство загрузки и транспортирования, новым является то, что средство для транспортирования боевого роботизированного комплекса выполнено на базе автомобильного кузова-фургона или в виде многоцелевого кузова-контейнера, средство загрузки выполнено в виде автономных погрузочно-разгрузочных устройств или в виде откидывающейся составной усиленной задней панели кузова-фургона, выполненной с возможностью обеспечения угла тангажа α боевого роботизированного комплекса при загрузке не более (25±3)°, пункт дистанционного управления размещается на бронеавтомобиле повышенной проходимости, внутри которого размещена аппаратура, оборудование и три автоматизированных рабочих места экипажа боевого роботизированного комплекса, оснащенных панельным компьютером командира, стационарным компьютером старшего оператора, переносным ноутбуком оператора, пункт дистанционного управления укомплектован двумя выносными радиостанциями, двумя носимыми пультами дистанционного управления, в походном положении уложенными в транспортировочные контейнеры.
Выполнение средства для транспортирования боевого роботизированного комплекса на базе автомобильного кузова-фургона позволяет:
- выполнять перевозку к месту развертывания не менее двух боевых роботизированных комплексов со снаряженной массой до 1 т;
- осуществлять погрузку и транспортирование автомобильного кузова-фургона в соответствии с допустимыми габаритами для российских железных дорог.
Выполнение средства загрузки в виде откидывающейся составной усиленной задней панели кузова-фургона, выполненной с возможностью обеспечения угла тангажа α боевого роботизированного комплекса при загрузке не более (25±3)°, позволяет:
- выполнять погрузку боевого роботизированного комплекса своим ходом с использованием технологического пульта управления;
- при невозможности движения комплекса своим ходом выполнять погрузку с помощью лебедки, размещенной в кузове-фургоне;
- сократить время погрузки и разгрузки;
- обеспечить безопасность персонала и сохранность комплекса при загрузке.
Размещение пункта дистанционного управления на бронеавтомобиле повышенной проходимости, внутри которого размещена аппаратура, оборудование и три автоматизированных рабочих места экипажа боевого роботизированного комплекса, позволяет:
- повысить эффективность управления боевым роботизированным комплексом;
- мобильно менять позицию пункта дистанционного управления;
- повысить удобство эксплуатации и обслуживания комплекса.
Комплектация пункта дистанционного управления двумя выносными радиостанциями позволяет:
- обеспечить связь между членами экипажа при работе с выносным оборудованием;
- обеспечить связь с соседними и вышестоящими подразделениями.
Комплектация пункта дистанционного управления двумя носимыми пультами дистанционного управления, в походном положении уложенными в транспортировочные контейнеры, позволяет:
- обеспечить безопасное, сохранное и компактное транспортирование пультов;
- обеспечить управление комплексом как в условиях прямой видимости, так и находясь на безопасном расстоянии;
- обеспечить управление комплексом при условии непроходимости транспортного средства по труднодоступной местности.
Выполнение средства транспортирования в виде многоцелевого кузова-контейнера позволяет:
- не использовать специальную систему загрузки;
- при разгрузке многоцелевого кузова-контейнера высвободить автотранспортное средство.
Выполнение средства загрузки в виде автономных погрузочно-разгрузочных устройств позволяет в штатном режиме устанавливать комплекс в транспортное положение.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
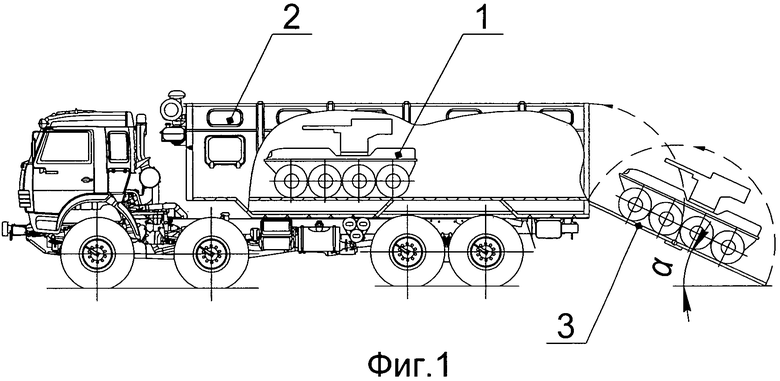
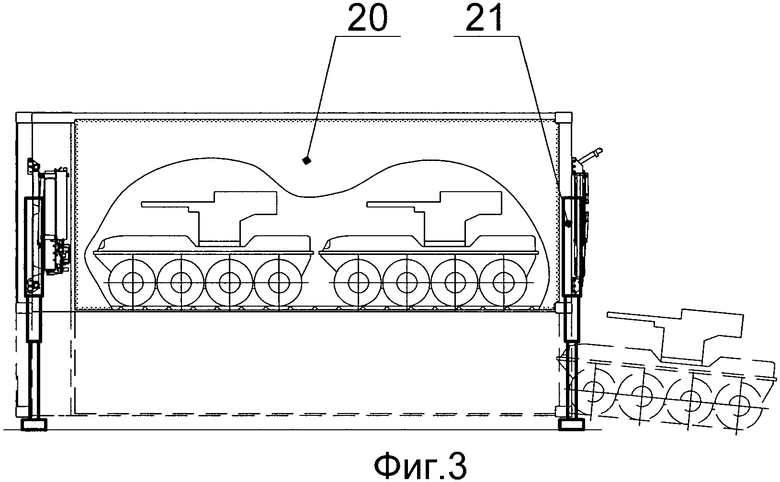
Сущность изобретения поясняется чертежами, где на фиг. 1 показана схема загрузки боевого роботизированного комплекса в кузов-фургон; на фиг. 2 - схема размещения экипажа и оборудования в пункте дистанционного управления; на фиг. 3 - схема загрузки боевого роботизированного комплекса в кузов-контейнер.
Система обеспечения функционирования боевого роботизированного комплекса содержит средство для транспортирования боевого роботизированного комплекса 1, выполненного на базе автомобильного кузова-фургона 2, средство загрузки, выполненное в виде откидывающейся составной усиленной задней панели 3 кузова-фургона 2, выполненной с возможностью обеспечения угла тангажа α боевого роботизированного комплекса 1 при загрузке не более (25±3)°, пункт дистанционного управления 4, размещенный на бронеавтомобиле 5 повышенной проходимости, например ГА3-233014 «Тигр». Экипаж пункта дистанционного управления 4 состоит из четырех человек: механик-водитель 6, командир роботизированного комплекса 7, старший оператор 8, оператор 9. В кузове размешены три автоматизированных рабочих места (АРМ). АРМ командира 7 представляет собой панельный компьютер 10, АРМ старшего оператора 8 выполнен на базе стационарного компьютера 11, а АРМ оператора 9 выполнен в виде переносного ноутбука 12. С задней стороны у приборной стойки размещены две выносные радиостанции 13, а также два носимых пульта дистанционного управления 14, уложенных в транспортные контейнеры 15. Справа от оператора 9 находится приборный ящик 16, где размещена аппаратура бесперебойного электропитания, а также согласующие и обрабатывающие устройства. Слева от старшего оператора 8 под сиденьем размещены отсеки под ЗИП 17. Автомобильный кузов оснащен системой жизнеобеспечения, в которой предусмотрены места под термосы 18 и питьевую воду в канистре 19. Средство для транспортирования может быть выполнено в виде многоцелевого кузова-контейнера 20, а средство загрузки - в виде автономных погрузочно-разгрузочных устройств 21.
Система обеспечения функционирования боевого роботизированного комплекса работает следующим образом. Для решения поставленной оперативной задачи боевой роботизированный комплекс 1 доставляется к месту развертывания в автомобильном кузове-фургоне 2 или в многоцелевом кузове-контейнере 20. При использовании в качестве средства для транспортирования автомобильного кузова-фургона 2 для загрузки боевого роботизированного комплекса 1 применяется откидывающаяся составная задняя панель 3 кузова-фургона 2. Погрузка комплекса 1 осуществляется своим ходом с использованием технологического пульта управления. При использовании в качестве средства для транспортирования многоцелевого кузова-контейнера 20 для загрузки используются автономные погрузочно-разгрузочные устройства 21. Комплекс 1 закатывают в кузов-контейнер 20 своим ходом с использованием технологического пульта управления, далее кузов-контейнер при помощи погрузочно-разгрузочного устройства 21 устанавливается в транспортное положение. Пункт дистанционного управления 4 с экипажем в составе механика-водителя 6, командира 7, старшего оператора 8 и оператора 9 доставляется к месту назначения своим ходом. При выполнении боевым роботизированным комплексом 1 задач по назначению его управление обеспечивается из пункта дистанционного управления 4 посредством работы экипажа на автоматизированных рабочих местах 10, 11 и 12. При необходимости для управления комплексом 1 может быть развернут носимый пульт дистанционного управления 13, предварительно извлеченный из транспортного контейнера 15. Возвращение к месту дислокации комплекса 1 происходит в том же порядке.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании системы обеспечения функционирования боевого роботизированного комплекса, обладающей достаточным составом функциональных средств для подготовки к выполнению задач по назначению, расширенными техническими возможностями, заключающимися в реализации функции мобильного перебазирования комплекса, удобстве в эксплуатации и управлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС | 2013 |
|
RU2538473C2 |
| ТОПОПРИВЯЗЧИК | 2010 |
|
RU2434762C1 |
| Мобильный наземный пункт управления, сбора, обработки и передачи информации | 2020 |
|
RU2768941C1 |
| МОДУЛЬНЫЙ БРОНЕАВТОМОБИЛЬ | 2022 |
|
RU2801086C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ НА БАЗЕ ШАССИ СПЕЦИАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2407658C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
| СИСТЕМА СВЯЗИ И ПЕРЕДАЧИ ДАННЫХ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2453994C1 |
Изобретение относится к военной технике. Система обеспечения функционирования боевого роботизированного комплекса содержит пункт дистанционного управления, комплект дополнительного оборудования, средство загрузки и транспортирования. Средство для транспортирования боевого роботизированного комплекса выполнено на базе автомобильного кузова-фургона или в виде многоцелевого кузова-контейнера. Средство загрузки выполнено в виде автономных погрузочно-разгрузочных устройств или в виде откидывающейся составной усиленной задней панели кузова-фургона, выполненной с возможностью обеспечения угла тангажа α боевого роботизированного комплекса при загрузке не более (25±3)°. Пункт дистанционного управления размещается на бронеавтомобиле повышенной проходимости, внутри которого размещена аппаратура, оборудование и три автоматизированных рабочих места экипажа боевого роботизированного комплекса. Рабочие места оснащены панельным компьютером командира, стационарным компьютером старшего оператора, переносным ноутбуком оператора. Пункт дистанционного управления укомплектован двумя выносными радиостанциями, двумя носимыми пультами дистанционного управления, в походном положении уложенными в транспортировочные контейнеры. Достигается повышение уровня технического оснащения роботизированного комплекса. 3 ил.
Система обеспечения функционирования боевого роботизированного комплекса, содержащая пункт дистанционного управления, комплект дополнительного оборудования, средство загрузки и транспортирования, отличающаяся тем, что средство для транспортирования боевого роботизированного комплекса выполнено на базе автомобильного кузова-фургона или в виде многоцелевого кузова-контейнера, средство загрузки выполнено в виде автономных погрузочно-разгрузочных устройств или в виде откидывающейся составной усиленной задней панели кузова-фургона, выполненной с возможностью обеспечения угла тангажа α боевого роботизированного комплекса при загрузке не более (25±3)°, пункт дистанционного управления размещается на бронеавтомобиле повышенной проходимости, внутри которого размещена аппаратура, оборудование и три автоматизированных рабочих места экипажа боевого роботизированного комплекса, оснащенных панельным компьютером командира, стационарным компьютером старшего оператора, переносным ноутбуком оператора, пункт дистанционного управления укомплектован двумя выносными радиостанциями, двумя носимыми пультами дистанционного управления, в походном положении уложенными в транспортировочные контейнеры.
| EP 1625053 B1, 27.04.2004 | |||
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| ПОДВИЖНЫЙ ПУНКТ ЦЕЛЕУКАЗАНИЯ И УПРАВЛЕНИЯ | 2010 |
|
RU2480705C2 |

