Изобретение относится к области оптико-электронного приборостроения и может быть использовано в автоматических оптико-электронных приборах, которые построены на основе матричных фотоприемников и выполняют измерение угловых координат точечных целей в условиях воздействия фоновых помех повышенного уровня. Особенностью таких приборов является то, что изображение точечной цели занимает несколько элементов матричного приемника, и для точного определения координат цели необходимо выполнять интерполяцию.
Известен способ измерения угловых координат точечной цели оптико-электронным прибором путем проецирования объективом изображения участка пространства, соответствующего полю зрения прибора, на фоточувствительную поверхность матричного приемника, преобразования спроецированного изображения в матрицу значений электрических сигналов, предварительного поиска и обнаружения этой цели, запоминания величины сигналов и номеров тех элементов, в которых зарегистрировано наличие изображения цели, и последующего определения координат энергетического центра изображен6ия по формулам координат «центра тяжести» [Kuzmin V.S., Fedoseev V.I., Zaeekin V.I. New generation of star sensors. Proc. SPIE, 2739-41, Acquisition, Tracking and Pointing X, 1996, vol.2739; Карелин А.Ю. Повышение точности астроизмерительных широкопольных приборов с ПЗС-матрицами. Оптический журнал, 1998, т.65, №8, 46-50].
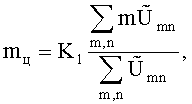
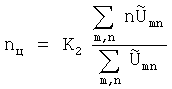
В этих формулах m, n - номера элементов по горизонтали и по вертикали соответственно, занятых изображением точечной цели,  - величины сигналов цели в этих элементах, K1, К2 - масштабные коэффициенты, равные угловому размеру элемента по горизонтали и по вертикали соответственно. Суммирование выполняется по всем элементам, в которых зарегистрировано наличие цели.
- величины сигналов цели в этих элементах, K1, К2 - масштабные коэффициенты, равные угловому размеру элемента по горизонтали и по вертикали соответственно. Суммирование выполняется по всем элементам, в которых зарегистрировано наличие цели.
Наиболее близкий к предлагаемому изобретению способ [Аванесов Г.А., Зиман Я.Л., Красиков В.А., Снеткова Н.И., Собчук В.Б., Форш А.А. Алгоритмы определения ориентации космического аппарата по бортовым астроизмерениям. Известия вузов. Приборостроение, 2003, т.46, №4, 31-36] предполагает:
проецирование участка пространства на фоточувствительную поверхность матричного приемника, преобразование изображения в матрицу значений электрических сигналов, содержащую сигналы фона и сигналы цели плюс фона. Перед началом собственно измерения координат цели производится поиск и обнаружение ее с регистрацией номеров тип элементов, в которых находится изображение цели, и запоминанием величин сигналов каждого элемента матрицы, соответствующих сумме сигналов цели и фона (сигналу цели плюс фона). Зарегистрированные при поиске элементы образуют группу элементов цели плюс фона. В процессе поиска для каждого элемента формируется также оценка фона путем усреднения сигналов элементов, относящихся к группе элементов фона - «окну» размером 13×13 элементов, центральным элементом которого является элемент, для которого формируется оценка. Далее для каждого элемента группы цели плюс фона определяют сигнал цели как разность сигналов цели плюс фона и оценки фона. И, наконец, по формулам (1), (2) вычисляют координаты энергетического центра изображения цели. Такая процедура может быть реализована при расположении изображения цели в любом месте матрицы, кроме краевой зоны вблизи границ шириной в половину размера «окна». Эта краевая зона считается запретной для нахождения цели.
Недостатком описанного известного способа является следующее. При формировании оценки фона путем усреднения сигналов элементов «окна» в тех случаях, когда в пределах «окна» находится изображение цели, сигнал цели также усредняется и в формируемую оценку фона вносит систематическую погрешность. Величина этой погрешности зависит от величины сигнала цели и от количества занимаемых целью элементов. При вычитании из сигнала цели плюс фона оценки фона эта погрешность вычитается из сигнала цели, тем самым снижая результирующее значение полезного сигнала цели и отношение сигнал/шум. Это приводит к повышению шумовой составляющей погрешности при определении координат энергетического центра изображения цели. Кроме того, если фон в пределах «окна» неравномерен и изменяется по нелинейному закону (что наиболее типично для многих применений), то при формировании оценки фона за счет значительного размера «окна» появляется еще дополнительная систематическая погрешность, зависящая от степени нелинейности. Это также приводит к дополнительной погрешности в определении координат энергетического центра, зависящей от уровня фона и характера его неравномерности.
Цель изобретения - снижение погрешности определения координат энергетического центра изображения цели.
Эта цель достигается, во-первых, за счет выбора для формирования оценки фона таких элементов, в которых нет изображения цели, и, во-вторых, за счет выбора количества элементов в группе фона и конфигурации этой группы такими, при которых величины шумовой погрешности и погрешности за счет ожидаемой неравномерности фона соответствуют требуемым.
Предлагаемый способ реализуется следующим образом. Осуществляется проецирование объективом изображения участка пространства, соответствующего полю зрения ОЭП, на фоточувствительную поверхность матричного фотоприемника,
- осуществляется преобразование матричным фотоприемником спроецированного изображения в матрицу значений электрических сигналов, содержащую сигналы фона и сигналы цели плюс фона,
- осуществляется запоминание матрицы значений электрических сигналов,
- осуществляется поиск и обнаружение тех элементов матрицы, в которых полезный сигнал превышает заранее выбранный порог и которые образуют группу элементов цели плюс фона, с регистрацией номеров этих элементов в строке m и в столбце n и электрических сигналов в них,
- осуществляется формирование электрического сигнала оценки фона  из элементов матрицы значений электрических сигналов,
из элементов матрицы значений электрических сигналов,
- осуществляется формирование сигнала цели  для элементов группы цели плюс фона как разности сигнала цели плюс фона и сигнала оценки фона;
для элементов группы цели плюс фона как разности сигнала цели плюс фона и сигнала оценки фона;
- осуществляется определение угловых координат цели mц, nц по формулам:
где K1, K2 - масштабные коэффициенты, равные угловому размеру элемента по горизонтали и по вертикали соответственно.
При этом процесс формирования электрического сигнала оценки фона  выполняется следующим образом: при проектировании прибора выбирается количество элементов по горизонтали Δmц и по вертикали Δnц, которое может занимать изображение цели. Это делается на основании известных методов расчета. Далее, также при проектировании прибора, выбираются четыре группы элементов для оценки фона, конфигурация и размеры которых должны удовлетворять условиям:
выполняется следующим образом: при проектировании прибора выбирается количество элементов по горизонтали Δmц и по вертикали Δnц, которое может занимать изображение цели. Это делается на основании известных методов расчета. Далее, также при проектировании прибора, выбираются четыре группы элементов для оценки фона, конфигурация и размеры которых должны удовлетворять условиям:
- эти группы должны быть симметричными относительно некоторого центра симметрии, имеющего координаты mc, nc и однозначно связанного с рисунком (маской, шаблоном) одного из элементов матрицы, - это может быть центр элемента, один из его углов, середина одной из сторон границы и др.; этот элемент, содержащий центр симметрии, принимается за центральный для групп фона; координаты mc, nc выражаются в числе элементов матрицы и могут быть как целыми, так и дробными;
- центры этих групп должны быть смещены от центра симметрии по горизонтали и по вертикали на такие минимальные расстояния Δm>Δmц/2 и Δn>Δnц/2, чтобы при совмещении центра симметрии с центром изображения цели последнее не попадало в элементы групп фона;
- количество элементов K в каждой группе выбирается так, чтобы составляющие погрешности измерения координат цели за счет шумов и за счет неравномерности фона, определенные путем расчета по известным методикам или математическим моделированием, соответствовали требуемым.
На чертеже в качестве примера представлен возможный вариант выбора групп элементов фона Л (смещенные влево), П (смещенные вправо), В (смещенные вверх), Н (смещенные вниз), а также расположение зоны возможного нахождения элементов группы цели плюс фона - зоны Ц.
Когда прибор начинает работать, на фоточувствительную поверхность матричного приемника проецируется изображение участка пространства и непосредственно перед измерением координат точечной цели выполняются поиск и обнаружение тех элементов на матрице, в которых находится ее изображение, с регистрацией номеров m и n этих элементов и значений сигналов в них Umn, соответствующих сумме сигнала цели и сигнала фона. Среди зарегистрированных номеров m определяется среднее mcp с округлением до ближайшего целого значения; аналогичным образом определяется среднее ncp среди зарегистрированных n. После этого начинается собственно измерение. Элемент с номерами mcp, ncp принимается за центральный, в пределах этого элемента устанавливаются координаты центра симметрии mc, nc и относительно этого центра выбираются четыре группы элементов фона с определенными заранее параметрами как указано выше; сигналы элементов этих групп также регистрируются и запоминаются. Для каждой из четырех групп элементов фона формируются соответствующие сигналы фона как среднеарифметические значения сигналов элементов в каждой группе, и им присваиваются обозначения: Фл - для группы, смещенной влево от центрального элемента, Фп - для группы, смещенной вправо, Фв - для группы, смещенной вверх, Фн - для группы, смещенной вниз. Для каждого элемента с номером m, n, входящего в группу цели, формируется сигнал оценки фона  путем использования цифрового или аналогового устройства по формуле
путем использования цифрового или аналогового устройства по формуле

Первое слагаемое в этой формуле является оценкой среднего значения фона, второе и третье - поправки на неравномерность фона по горизонтали и по вертикали соответственно (поправки на градиент). Далее, для каждого элемента с номером m, n, входящего в группу цели, формируют сигнал цели  как разность сигнала цели плюс фона Umn и сигнала оценки фона
как разность сигнала цели плюс фона Umn и сигнала оценки фона  ,
,
 .
.
И, наконец, вычисляют координаты энергетического центра изображения цели mц, nц, выражаемые в числе элементов матрицы, по формулам для координат «центра тяжести» (1), (2). Суммирование в этих формулах проводится по всем элементам с номерами m, n, в которых зарегистрировано наличие цели.
В предлагаемом способе, так же как в известном, вблизи границы матрицы имеется краевая запретная зона, в пределах которой цель не должна находиться; размер этой зоны устанавливается при проектировании прибора.
Описанный способ дает уменьшение погрешности измерения координат цели по сравнению с известным по двум причинам:
- в элементах, сигналы которых участвуют в формировании оценки фона, нет изображения цели; благодаря этому сигналы цели не вносят дополнительной погрешности в оценку фона и в результат измерения координат цели;
- количество элементов, сигналы которых участвуют в формировании оценки фона, может варьироваться в зависимости от особенностей фоновой обстановки в том или ином конкретном применении; поскольку снижать составляющую погрешности за счет нелинейности фона можно за счет уменьшения количества элементов К в группах фона и расстояния между ними, несколько увеличивая при этом шумовую составляющую, то, располагая данными по характеру неравномерности, при проектировании прибора возможно выбрать такое значение K, при котором в совокупности с другими параметрами прибора (временем накопления, полосой пропускания) будут обеспечиваться необходимые значения погрешностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ СЛАБОИЗЛУЧАЮЩИХ ПОДВИЖНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ НА ПРОСТРАНСТВЕННО-НЕОДНОРОДНОМ ФОНЕ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2013 |
|
RU2536082C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ЦЕЛЕЙ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2009 |
|
RU2408898C1 |
| Способ автоматического определения разрешающей способности цифровых оптико-электронных систем и тест-объект для его осуществления, включающий штриховые миры с дугообразной структурой элементов | 2021 |
|
RU2797508C2 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| СПОСОБ СЕЛЕКЦИИ ТЕПЛОВЫХ ОБЪЕКТОВ | 2008 |
|
RU2401445C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ГРУППОВЫХ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2016 |
|
RU2649899C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ТЕПЛОВЫХ ОБЪЕКТОВ НА МАСКИРУЮЩЕМ АТМОСФЕРНОМ ФОНЕ | 2011 |
|
RU2480780C1 |
| СПОСОБ КОРРЕКЦИИ НЕОДНОРОДНОСТИ МАТРИЧНЫХ ФОТОПРИЕМНЫХ УСТРОЙСТВ С МИКРОСКАНИРОВАНИЕМ | 2007 |
|
RU2349053C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539728C1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ НАПРАВЛЕНИЯ ВИЗИРНОЙ ОСИ ДВУХКАМЕРНОЙ ТЕЛЕВИЗИОННОЙ СИСТЕМЫ | 2005 |
|
RU2298883C2 |
Заявлен способ измерения угловых координат точечной цели оптико-электронным прибором. В способе получают изображение участка пространства и преобразуют матричным фотоприемником изображение в матрицу значений электрических сигналов, содержащую сигналы фона и сигналы цели плюс фона. Затем обнаруживают те элементов матрицы, в которых полезный сигнал превышает заранее выбранный порог. Затем формируется сигнал оценки фона из элементов матрицы значений электрических сигналов. Затем формируется сигнал цели для элементов группы цели плюс фона как разности сигнала цели плюс фона и сигнала оценки фона. Затем определяют угловые координаты цели. Технический результат - снижение погрешности определения координат энергетического центра изображения цели. 1 ил.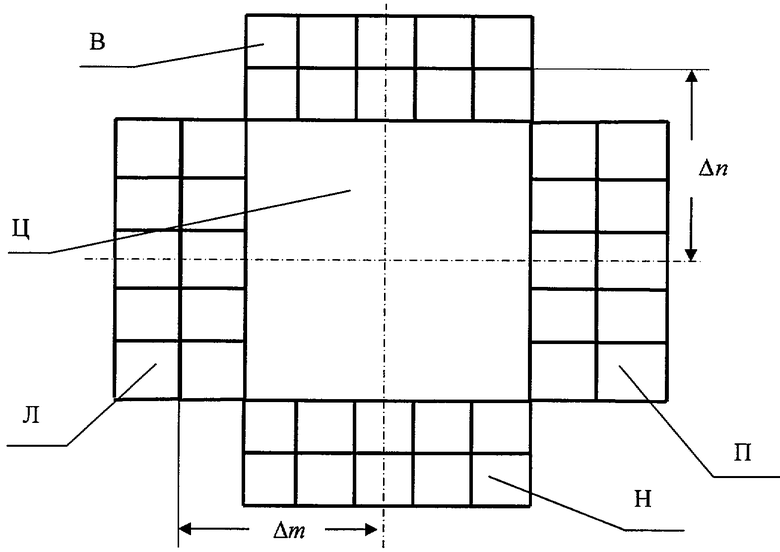
1. Способ измерения угловых координат точечной цели оптико-электронным прибором, включающий:
проецирование объективом изображения участка пространства, соответствующего полю зрения ОЭП, на фоточувствительную поверхность матричного фотоприемника,
преобразование матричным фотоприемником спроецированного изображения в матрицу значений электрических сигналов, содержащую сигналы фона и сигналы цели плюс фона,
запоминание матрицы значений электрических сигналов,
поиск и обнаружение тех элементов матрицы, в которых полезный сигнал превышает заранее выбранный порог, и которые образуют группу элементов цели плюс фона, с регистрацией номеров этих элементов в строке m и в столбце n и электрических сигналов в них,
формирование электрического сигнала оценки фона  из элементов матрицы значений электрических сигналов,
из элементов матрицы значений электрических сигналов,
формирование сигнала цели  для элементов группы цели плюс фона, как разности сигнала цели плюс фона и сигнала оценки фона;
для элементов группы цели плюс фона, как разности сигнала цели плюс фона и сигнала оценки фона;
определение угловых координат цели mц, nц по формулам:
 ,
,
где K1, K2 - масштабные коэффициенты, равные угловому размеру элемента по горизонтали и по вертикали соответственно, отличающийся тем, что процесс формирования электрического сигнала оценки фона выполняется следующим образом:
заранее при проектировании прибора для формирования сигнала оценки фона выбирают шаблон для четырех групп элементов фона, конфигурация и размеры которых должны удовлетворять условиям:
эти группы должны быть симметричными относительно некоторого центра симметрии, положение которого однозначно связано с границами одного из элементов матрицы, принимаемого за центральный элемент для групп фона,
центры этих групп должны быть смещены от центра симметрии по горизонтали и по вертикали на такие минимальные расстояния Δm и Δn, чтобы при совмещении центра симметрии с центром изображения цели последнее не попадало в элементы групп фона,
количество элементов К в каждой группе выбирается так, чтобы составляющие погрешности измерения координат цели за счет шумов и за счет неравномерности фона соответствовали требуемым,
среди электрических сигналов цели плюс фона, зарегистрированных при поиске и обнаружении, выбирают сигналы с минимальными номерами mmin и nmin с максимальными номерами mmах и nmах, после чего определяют номера срединного элемента цели mср=0,5(mmin+mmах) и nср=0,5(nmin+nmах) с округлением до ближайшего целого, который принимают за центральный элемент групп фона и в его пределах размещают центр симметрии этих групп с координатами mc, nc,
по выбранному заранее шаблону с центром симметрии mc, nс среди элементов матрицы выбирают четыре группы элементов фона,
выбирают из запомненной матрицы значений электрических сигналов те сигналы, которые относятся к элементам четырех групп фона,
для каждой из четырех групп фона формируют четыре соответствующие сигнала фона как среднеарифметические значения электрических сигналов элементов в каждой группе Фл - для группы, смещенной влево от центра симметрии, Фп - для группы, смещенной вправо, Фв - для группы, смещенной вверх, Фн - для группы, смещенной вниз;
для каждого элемента с номерами m, n из группы цели плюс фона формируют сигнал оценки фона в соответствии с формулой

| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2008 |
|
RU2363015C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2002 |
|
RU2215264C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2358240C2 |
| US 5825481 A, 20.10.1998. | |||

