Изобретение относится к области оптико-электронного приборостроения и может быть использовано в автоматических оптико-электронных приборах, которые выполняют поиск и обнаружение точечных целей в условиях повышенного уровня фоновых помех.
Известен способ поиска и обнаружения точечных целей в оптико-электронных приборах путем проецирования объективом изображения участка пространства, соответствующего полю зрения ОЭП, на фоточувствительную поверхность матричного фотоприемника, преобразования оптических сигналов элементов в электрические, нахождения оценок уровня фона и уровня сигнала плюс фона, их вычитания, сравнения результата с порогом, регистрации наличия цели в тех элементах, для которых имелось превышение порога [Федосеев В.И., Колосов М.П. Оптико-электронные приборы ориентации и навигации космических аппаратов. М., Логос, 2007, стр.56-59 и Аванезов Г.А., Воронков С. В., Форш А.А., Куделин М.И. Звездные координаторы систем ориентации космичеких аппаратов. Известия вузов. Приборостроение, т.46, 2003 г., №4, стр.66-69].
Наиболее близкий к предлагаемому изобретению способ [Ежов О.М. сравнительный анализ алгоритмов обнаружения звезд для приборов ориентации с матрицами ПЗС. Оптический журнал, 1998, т.65, №8, стр.56-60] включает проецирование изображения участка пространства на фоточувствительную поверхность матричного фотоприемника, преобразование оптических сигналов элементов в электрические и их запоминание, выбор двух взаимосвязанных групп элементов для формирования сигнала фона и сигнала цели плюс фона, формирование этих двух сигналов, последующее формирование сигнала цели как разности сигнала цели плюс фона и сигнала фона, сравнение результата с порогом, повторение указанных процедур выбора групп элементов, формирование сигналов и сравнение для различных положений выбранных групп в поле зрения и регистрацию наличия цели в тех положениях групп, для которых имело место превышение порога. При этом группа элементов сигнала цели плюс фона выбирается в виде квадрата размером 2×2 элемента, группа элементов фона - в виде двух или четырех подгрупп размером 1×2 элемента, расположенных симметрично относительно центра квадрата первой группы и смещенных от этого центра на 2 элемента. Формирование сигнала цели плюс фона производится путем простого суммирования сигналов элементов этой группы, а формирование сигнала фона - путем суммирования сигналов элементов этой группы с весовыми коэффициентами 1 в случае двух подгрупп 0,5 в случае четырех подгрупп.
Описанный известный способ при повышенном уровне фона приводит к повышению вероятности ошибочных решений - пропуска цели или ложного обнаружения цели.
Цель изобретения - снижение вероятностей ошибочных решений при поиске и обнаружении точечных целей.
Эта цель достигается
- во-первых, рациональным выбором конфигурации и размеров групп элементов сигнала фона плюс цели и сигнала фона,
- во-вторых, при формировании этих сигналов умножением сигналов элементов на специально подобранные для этого весовые коэффициенты.
Для реализации указанной цели способ поиска и обнаружения точечных целей включает:
- проецирование оптической системой оптико-электронного прибора (ОЭП) изображения участка пространства, соответствующего полю зрения ОЭП, на фоточувствительную поверхность матричного фотоприемника,
- преобразование матричным фотоприемником спроецированного изображения в матрицу значений электрических сигналов,
- запоминание матрицы значений электрических сигналов,
- выбор в матрице значений электрических сигналов двух групп сигналов, относящихся к двум соответствующим взаимосвязанным группам элементов матричного приемника,
- формирование из указанных групп сигналов сигнала цели плюс фона (Ц+Ф) и сигнала фона(Ф),
- формирование сигнала цели (Ц) как разности сигнала Ц+Ф и сигнала Ф,
- сравнение сигнала (Ц) с заранее выбранным порогом,
- регистрацию наличия цели для того положения групп, в котором имело место превышение порога,
- выбор в матрице значений электрических сигналов для различных положений двух выбранных групп сигналов, формирование из данных групп сигналов сигнала цели плюс фона (Ц+Ф) и сигнала фона (Ф), формирование сигнала цели (Ц) как разности сигнала Ц+Ф и сигнала Ф, сравнение сигнала (Ц) с заранее выбранным порогом, регистрацию наличия цели для того положения групп, в котором имело место превышение порога. При этом:
- первая группа электрических сигналов (группа Ц+Ф) выбирается так, чтобы соответствующая ей группа элементов матричного приемника составляла многоугольник минимальных размеров, описанный вокруг фигуры сечения эквивалентной функции рассеяния оптической системы ОЭП на уровне γ% энергии и не выходящий за пределы поля зрения,
- вторая группа электрических сигналов (группа Ф) выбирается так, чтобы соответствующая ей группа элементов матричного приемника составляла совокупность четного числа 2n элементов, попарно симметрично расположенных относительно центра многоугольника первой группы, смещенных относительно этого центра за пределы многоугольника и не выходящих за пределы поля зрения,
- для каждого электрического сигнала группы Ц+Ф заранее выбирается весовой коэффициент, пропорциональный доле энергии эквивалентной функции рассеяния объектива для соответствующего этому сигналу элемента,
- для электрических сигналов группы Ф заранее выбирается весовой коэффициент, равный сумме весовых коэффициентов группы Ц+Ф, поделенной на число элементов группы Ф - 2n,
- формирование сигнала Ц+Ф производится путем суммирования электрических сигналов этой группы с заранее выбранными для них весовыми коэффициентами,
- формирование сигнала Ф производится путем суммирования электрических сигналов этой группы и умножения суммы на заранее выбранный для этой группы весовой коэффициент.
Наиболее предпочтительно, чтобы эквивалентная функция рассеяния объектива прибора на уровне γ % энергии лежала в пределах от 70% до 95% включительно.
Устройство поясняется следующими чертежами.
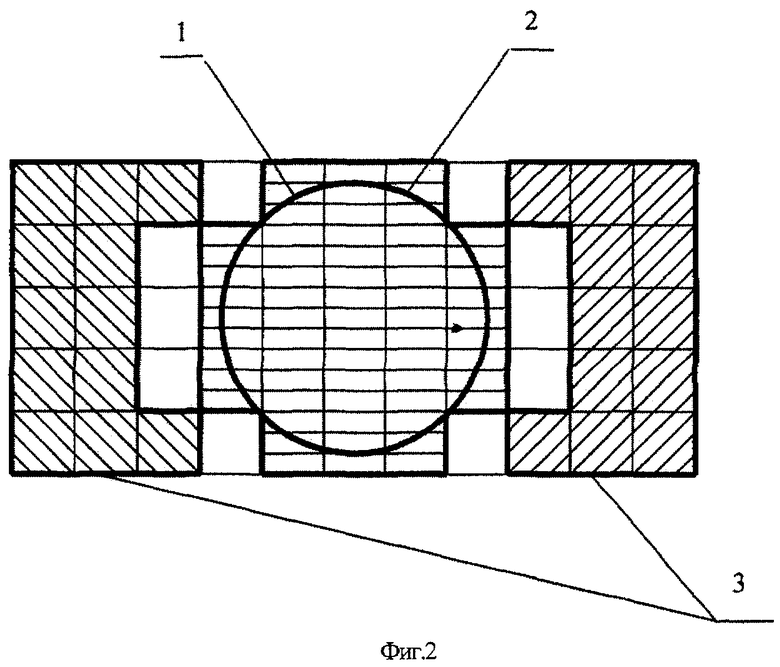
Фиг.1 - пример графика эквивалентной функции рассеяния точки (ЭФРТ), учитывающей размытие изображения из-за аберраций и из-за его перемещения в течение времени наблюдения.
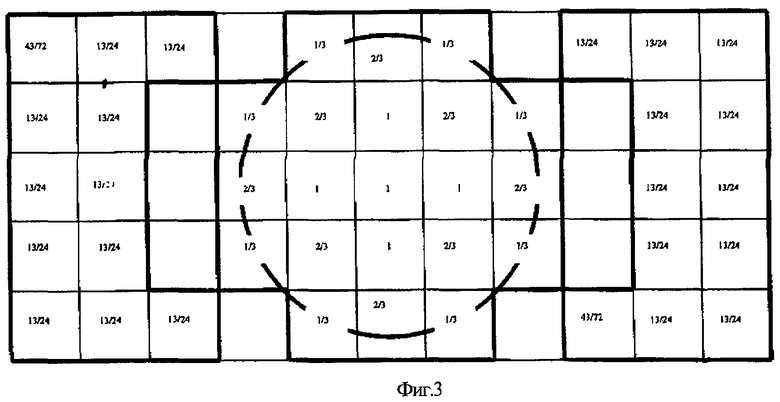
Фиг.2 - вид матричного фотоприемника с наложенной на него ЭФРТ и описанный многоугольник минимальных размеров вокруг нее.
Фиг.3 - пример набора весовых коэффициентов для ЭФРТ.
Конкретно способ реализуется следующем образом.
Предварительно при проектировании прибора определяется функция рассеяния точки (ФРТ) оптической системы, учитывающая размытие изображения из-за аберраций объектива, и эквивалентная функция рассеяния точки (ЭФРТ), учитывающая размытие изображений как из-за аберраций, так и из-за его перемещения в течение времени наблюдения (времени накопления в фотоприемнике, если последний с накоплением заряда, или времени накопления в схеме обработки, если приемник без накопления). Пример такой ЭФРТ дан на фиг.1. График ЭФРТ 1 в декартовой системе координат OXYZ представляется некоторой поверхностью, а объем, заключенный между этой поверхностью и координатной плоскостью OXY, принимается за 100% энергии ЭФРТ. Далее делается сечение ЭФРТ по уровню γ% энергии полученного излучения матричным фотоприемником (например, от 70% до 95%) и в плоскости OXY строится фигура этого сечения 2 - такая фигура, над которой содержится γ % энергии ЭФРТ (см. фиг.1). Фигура сечения 2 накладывается на решетчатую структуру элементов поля зрения, и вокруг нее описывается многоугольник 1 минимальных размеров, состоящий из этих элементов (пример см. фиг.2). Для каждого из элементов, входящих в многоугольник, вычисляется доля энергии ЭФРТ, приходящейся на этот элемент, которую будем называть долей ЭФРТ для этого элемента. Элементы, входящие в многоугольник, составляют группу сигнала цели плюс фона. Затем определяется группа элементов сигнала фона 3 в виде совокупности четного числа 2n элементов, расположенных за пределами многоугольника попарно симметрично относительно его центра (пример см. фиг.2).
В процессе функционирования прибора поиск и обнаружение выполняются следующим образом. Производится проецирование объективом изображения участка пространства, соответствующего полю зрения ОЭП, на фоточувствительную поверхность матричного фотоприемника, преобразование оптических сигналов элементов в матрицу значений электрических сигналов и их запоминание. После этого выбираются запомненные сигналы первой пары групп элементов - группы сигнала цели плюс фона (Ц+Ф) и группы сигнала фона (Ф). Конфигурация и размеры этих групп - те, которые были определены при проектировании прибора вышеописанным образом. Далее формируется сигнал Ц+Ф путем суммирования сигналов элементов этой группы, взятых с весовыми коэффициентами, пропорциональными долям ЭФРТ соответствующих элементов. Пример набора весовых коэффициентов представлен на фиг.3. Сигнал Ф формируется путем суммирования сигналов элементов этой группы и умножения суммы на весовой коэффициент, равный сумме коэффициентов для сигналов Ц+Ф, поделенной на число элементов 2n в группе фона (пример см. фиг.3). Затем формируется разность сигнала Ц+Ф и сигнала Ф, которая соответствует сигналу цели (Ц). Сигнал Ц сравнивается с заранее выбранным порогом. Если происходит превышение порога, то для данного положения групп элементов в поле зрения регистрируется наличие цели в группе элементов цели и фона. Если превышения порога нет, то принимается решение об отсутствии цели в данном положении групп элементов. После этого выбираются запомненные сигналы второй пары групп элементов, для них повторяются описанные выше действия. После перебора всех положений групп элементов, покрывающих все поле зрения прибора, оказываются зарегистрированы те положения, в которых имеется цель.
Описанный способ дает снижение вероятностей ошибочных решений по сравнению с известными за счет повышения отношения сигнал/шум при сравнении сигнала цели с порогом. Это происходит по двум причинам:
- из-за лучшего согласования передаточной функции реализованного пространственного фильтра с ЭФРТ оптической системы;
- из-за возможности использовать сигналы большего числа элементов для усреднения сигнала фона.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ СЛАБОИЗЛУЧАЮЩИХ ПОДВИЖНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ НА ПРОСТРАНСТВЕННО-НЕОДНОРОДНОМ ФОНЕ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2013 |
|
RU2536082C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ТОЧЕЧНОЙ ЦЕЛИ ОПТИКО-ЭЛЕКТРОННЫМ ПРИБОРОМ | 2009 |
|
RU2420761C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 1999 |
|
RU2155357C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ОБЪЕКТА В ИЗОБРАЖЕНИИ | 2011 |
|
RU2483354C1 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2021 |
|
RU2774945C1 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ ЛАЗЕРНЫХ ЛОКАЦИОННЫХ СИСТЕМ | 2020 |
|
RU2751644C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СИСТЕМ СКРЫТОГО ВИДЕОНАБЛЮДЕНИЯ | 2006 |
|
RU2308746C1 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ ЛАЗЕРНЫХ ЛОКАЦИОННЫХ СИСТЕМ | 2020 |
|
RU2748459C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЗВЕЗД | 2009 |
|
RU2408849C1 |
Заявленное изобретение относится к области оптико-электронного приборостроения и может быть использовано в автоматических оптико-электронных приборах, выполняющих поиск и обнаружение целей в условиях повышенного уровня фоновых помех. Особенностью данного способа является то, что первая группа электрических сигналов (группа цель+фон) выбирается так, чтобы соответствующая ей группа элементов матричного приемника составляла многоугольник минимальных размеров, описанный вокруг фигуры сечения эквивалентной функции рассеяния оптической системы оптико-электронного прибора на уровне γ% энергии. Вторая группа электрических сигналов (группа фон) выбирается так, чтобы соответствующая ей группа элементов матричного приемника составляла совокупность четного числа 2n элементов. Для каждого электрического сигнала групп (цель+фон) и (фон) заранее выбирается весовой коэффициент. При формировании этих сигналов производится умножение сигналов элементов на специально подобранные для этого весовые коэффициенты. Техническим результатом изобретения является снижение вероятностей ошибочных решений при поиске и обнаружении точечных целей. 1 з.п. ф-лы, 3 ил.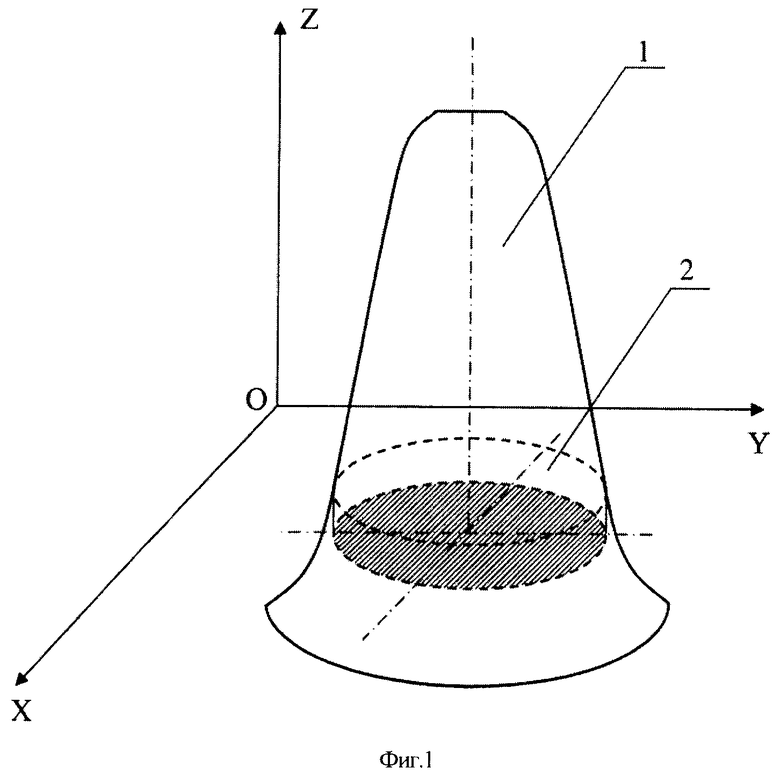
1. Способ поиска и обнаружения точечных целей оптико-электронными приборами, включающий:
проецирование оптической системой оптико-электронного прибора (ОЭП) изображения участка пространства, соответствующего полю зрения ОЭП, на фоточувствительную поверхность матричного фотоприемника,
преобразование матричным фотоприемником спроецированного изображения в матрицу значений электрических сигналов,
запоминание матрицы значений электрических сигналов,
выбор в матрице значений электрических сигналов двух групп сигналов, относящихся к двум соответствующим взаимосвязанным группам элементов матричного приемника,
формирование из указанных групп сигналов сигнала цели плюс фона (Ц+Ф) и сигнала фона (Ф),
формирование сигнала цели (Ц), как разности сигнала Ц+Ф и сигнала Ф,
сравнение сигнала (Ц) с заранее выбранным порогом,
регистрацию наличия цели для того положения групп, в котором имело место превышение порога,
выбор в матрице значений электрических сигналов для различных положений двух выбранных групп сигналов, формирование из данных групп сигналов сигнала цели плюс фона (Ц+Ф) и сигнала фона (Ф), формирование сигнала цели (Ц), как разности сигнала Ц+Ф и сигнала Ф, сравнение сигнала (Ц) с заранее выбранным порогом, регистрацию наличия цели для того положения групп, в котором имело место превышение порога, отличающийся тем, что:
первая группа электрических сигналов (группа Ц+Ф) выбирается так, чтобы соответствующая ей группа элементов матричного приемника составляла многоугольник минимальных размеров, описанный вокруг фигуры сечения эквивалентной функции рассеяния оптической системы ОЭП на уровне γ% энергии и не выходящий за пределы поля зрения ОЭП,
вторая группа электрических сигналов (группа Ф) выбирается так, чтобы соответствующая ей группа элементов матричного приемника составляла совокупность четного числа 2n элементов, попарно симметрично расположенных относительно центра многоугольника первой группы, смещенных относительно этого центра за пределы многоугольника и не выходящих за пределы поля зрения,
для каждого электрического сигнала группы Ц+Ф заранее выбирается весовой коэффициент, пропорциональный доле энергии эквивалентной функции рассеяния оптической системы ОЭП для соответствующего этому сигналу элемента,
для электрических сигналов группы Ф заранее выбирается весовой коэффициент, равный сумме весовых коэффициентов группы Ц+Ф, поделенной на число элементов группы Ф-2n,
формирование сигнала Ц+Ф производится путем суммирования электрических сигналов этой группы с заранее выбранными для них весовыми коэффициентами,
формирование сигнала Ф производится путем суммирования электрических сигналов этой группы и умножения суммы на заранее выбранный для этой группы весовой коэффициент.
2. Способ поиска и обнаружения точечных целей по п.1, отличающийся тем, что эквивалентная функция рассеяния объектива прибора на уровне γ% энергии лежит в пределах от 70 до 95% включительно.
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2219564C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2331084C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СИСТЕМ СКРЫТОГО ВИДЕОНАБЛЮДЕНИЯ | 2006 |
|
RU2308746C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СКРЫТЫХ ОБЪЕКТОВ | 1985 |
|
SU1840514A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| Способ реабилитации функциональных расстройств у больных с сердечно-сосудистыми заболеваниями | 1989 |
|
SU1731217A1 |

