ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу обнаружения космических обломков на геоцентрической орбите.
УРОВЕНЬ ТЕХНИКИ
Космические обломки являются искусственным объектом, который движется по геоцентрическим орбитам и при этом больше не используется. Примеры космических обломков включают в себя: космические корабли (искусственные спутники, космические станции, космические челноки и т.п.), которые прекратили работу вследствие окончания срока службы, поломок и аварий; корпусы и компоненты ракет, используемых для запуска искусственных спутников; фрагменты, образованные при отделении ступеней многоступенчатых ракет; инструменты, выпущенные из рук астронавтами во время работ вне космического корабля, и т.п. Кроме того, космические обломки также включают в себя мелкие обломки, образованные космическими обломками, сталкивающимися друг с другом и дробящимися на фрагменты. Соответственно, существуют различные размеры космических обломков.
Обнаружение космических обломков важно для достижения бесперебойности работ космических кораблей (искусственных спутников, космических станций, космических челноков и т.п.). Одним из обычных способов обнаружения космических обломков является способ идентификации существования космических обломков посредством выделения части с большой яркостью в изображениях, фиксируемых с Земли или на орбите посредством CCD-камеры.
В этом способе из трех или нескольких изображений, фиксируемых в интервалах времени, вырезаются изображения областей идентичного размера в соответствии с движением (направление вектора и скалярная величина) движущегося объекта, например, космических обломков, и к вырезанным изображениям применяется способ наложения. Более точно, вырезанные изображения накладываются друг на друга, и для каждого пиксела вырезанных изображений вычисляется срединное значение или среднее значение значений пиксела. Далее, каждый пиксел, вычисленное срединное значение или среднее значение которого больше или равно предопределенного значения, выделяется как пиксел, представляющий существование движущегося объекта (см. PTL 1, например).
СПИСОК ЛИТЕРАТУРЫ
Патентная литература
[PTL 1] JP 2003-323625 А
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
Когда с использованием способа наложения, описанного выше, исходя из множества изображений, фиксируемых в интервалах времени, обнаруживают космические обломки, вырезанные области из соответствующих изображений должны быть сдвинуты согласно движению космических обломков во время интервалов времени для фиксации изображений и наложены так, чтобы фрагменты космических обломков, которые является целью обнаружения, появляющиеся на соответствующих изображениях, были должным образом наложены друг на друга. Однако движение (направление вектора и скалярная величина) космических обломков, являющихся целью обнаружения, обычно заранее не известно.
Поэтому вырезаемые области из изображений для наложения должным образом фрагментов космических обломков как цели обнаружения должны быть найдены посредством повторения метода проб и ошибок, когда вырезанная область из изображений сдвигается в различных направлениях и на различные величины. Такой метод проб и ошибок требует обработки огромного объема, которая может длиться месяцы или годы, если используется универсальный компьютер.
Соответственно, очевидно, что космические обломки, появляющиеся на множестве изображений космического пространства для наблюдения, фиксируемых в интервалах времени, сложно обнаружить на этом множестве изображений посредством обработки изображения.
С учетом вышеупомянутых обстоятельств задачей настоящего изобретения является обеспечение способа обнаружения космических обломков, посредством которого можно эффективно обнаруживать космические обломки посредством простой обработки исходя из множества изображений космического пространства для наблюдения, фиксируемых в интервалах времени.
Решение задачи
Одним аспектом настоящего изобретения является способ обнаружения космических обломков на геоцентрической орбите, причем эти космические обломки появляются на множестве изображений, фиксируемых в интервалах времени во время наблюдения в неподвижной точке. Способ содержит: этап идентификации объекта, заключающийся в идентификации объекта, возникшего в результате разрушения, который вероятно разрушился на геоцентрической орбите в прошлом; этап генерации виртуальных обломков, заключающийся в генерации виртуального фрагмента космических обломков в соответствии с законом сохранения массы с применением модели разрушения на обломки к объекту, возникшему в результате разрушения, идентифицированному на этапе идентификации объекта; этап вычисления орбиты, заключающийся в применении модели прохождения орбиты обломков к каждому виртуальному фрагменту космических обломков, сгенерированному на этапе генерации виртуальных обломков, посредством чего вычисляется орбита виртуального фрагмента космических обломков во время наблюдения в неподвижной точке; этап генерации распределения вектора движения, заключающийся в генерации распределения частоты появления вектора движения каждого виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке на основе результата вычисления орбиты на этапе вычисления орбиты; этап оценки вектора движения, заключающийся в оценке вектора движения фрагмента космических обломков на изображениях на основе вектора движения, имеющего высокий уровень в распределении частоты появления на основе кумулятивного распределения множества результатов распределения частоты появления вектора движения, получаемого при выполнении этапа генерации виртуальных обломков, этапа вычисления орбиты и этапа генерации распределения вектора движения; и этап обнаружения, заключающийся в осуществлении перекрестного контроля фрагментов информации пиксела относительно соответствующих областей на изображениях, фиксируемых в интервалах времени во время наблюдения в неподвижной точке, причем эти области последовательно сдвигаются в направлении и на величину оцененного вектора движения в порядке фиксации, посредством чего на геоцентрической орбите обнаруживаются космические обломки, появляющиеся на изображениях.
Способ обнаружения космических обломков может также содержать: этап установки вектора диапазона поиска, заключающийся в установке вектора диапазона поиска на основе оцененного вектора движения, причем этот вектор диапазона поиска указывает направление движения и величину движения диапазона поиска космических обломков, появляющихся на изображениях, причем этап обнаружения может включать в себя применение способа наложения на соответствующие области в изображениях, фиксируемых в интервалах времени во время наблюдения в неподвижной точке, причем эти области последовательно сдвигаются в направлении и на величину установленного вектора диапазона поиска в порядке фиксации, посредством чего на геоцентрической орбите обнаруживают космические обломки, появляющиеся на изображениях.
Этап вычисления орбиты может включать в себя этап вычисления орбиты на основании времени, заключающийся в выполнении вычисления орбиты каждого виртуального фрагмента космических обломков, сгенерированного на этапе генерации виртуальных обломков, для каждого из моментов времени в регулярных интервалах времени в период от начала до окончания наблюдения в неподвижной точке. На этапе генерации распределения вектора движения может генерироваться распределение частоты появления вектора движения на основе результата вычисления орбиты в моменты времени на этапе вычисления орбиты на основании времени.
Способ обнаружения космических обломков может также содержать: этап генерации распределения обломков, заключающийся в генерации распределения вероятностей существования каждого виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке на основе результата вычисления орбиты на этапе вычисления орбиты, и этап установки космического пространства для фиксации, заключающийся в установке космического пространства, включающего в себя область, имеющую высокий уровень в распределении вероятностей существования виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке, как космического пространства для фиксации изображений во время наблюдения в неподвижной точке на основе кумулятивного распределения множества результатов распределения вероятностей существования, полученных при многократном выполнении этапа генерации виртуальных обломков, этапа вычисления орбиты и этапа генерации распределения обломков, причем упомянутые изображения получают посредством фиксации установленного космического пространства для фиксации в интервалах времени.
Этап вычисления орбиты может включать в себя этап вычисления орбиты на основании времени, заключающийся в выполнении вычисления орбиты каждого виртуального фрагмента космических обломков, сгенерированного на этапе генерации виртуальных обломков для каждого из моментов времени в регулярных интервалах времени в период от начала до окончания наблюдения в неподвижной точке. Этап генерации распределения обломков может включать в себя: этап вычисления позиции существования, заключающийся в вычислении позиции существования каждого виртуального фрагмента космических обломков на небесной сфере в каждый момент времени на основе результата вычисления орбиты в момент времени на этапе вычисления орбиты на основании времени, и этап генерации распределения вероятностей существования, заключающийся в генерации распределения вероятностей существования каждого виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке на основе результата вычисления на этапе вычисления позиции существования.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению космические обломки можно эффективно обнаруживать посредством простой обработки исходя из множества изображений наблюдаемого космического пространства, фиксируемых в интервалах времени во время наблюдения в неподвижной точке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - поясняющий вид, представляющий основные принципы обработки для обнаружения космических обломков с применением способа наложения.
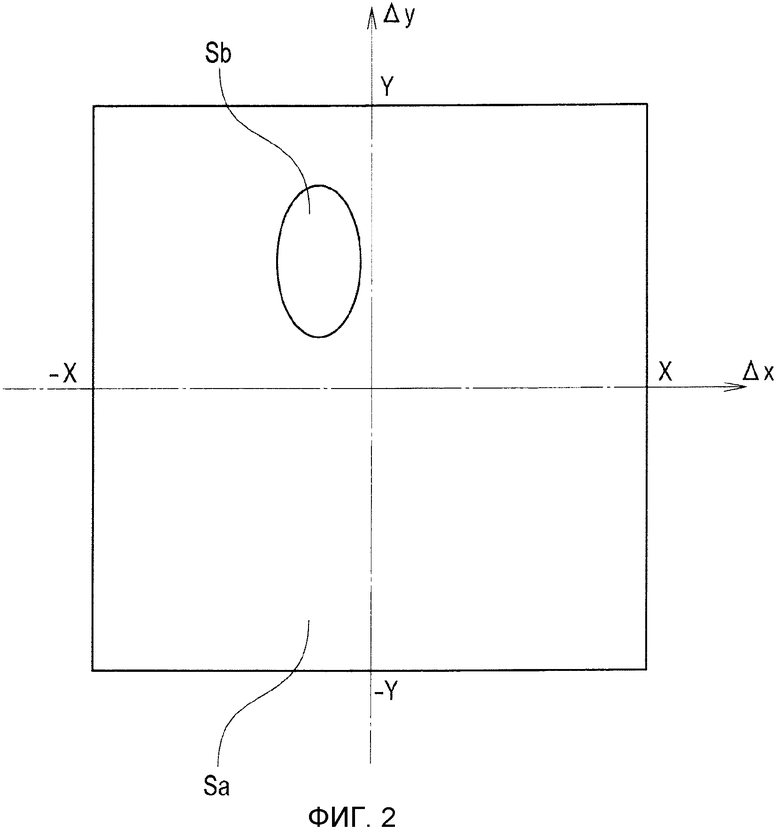
Фиг.2 - поясняющий вид, представляющий ожидаемый диапазон вектора движения космических обломков, необходимый для выполнения обработки для обнаружения по фиг.1.
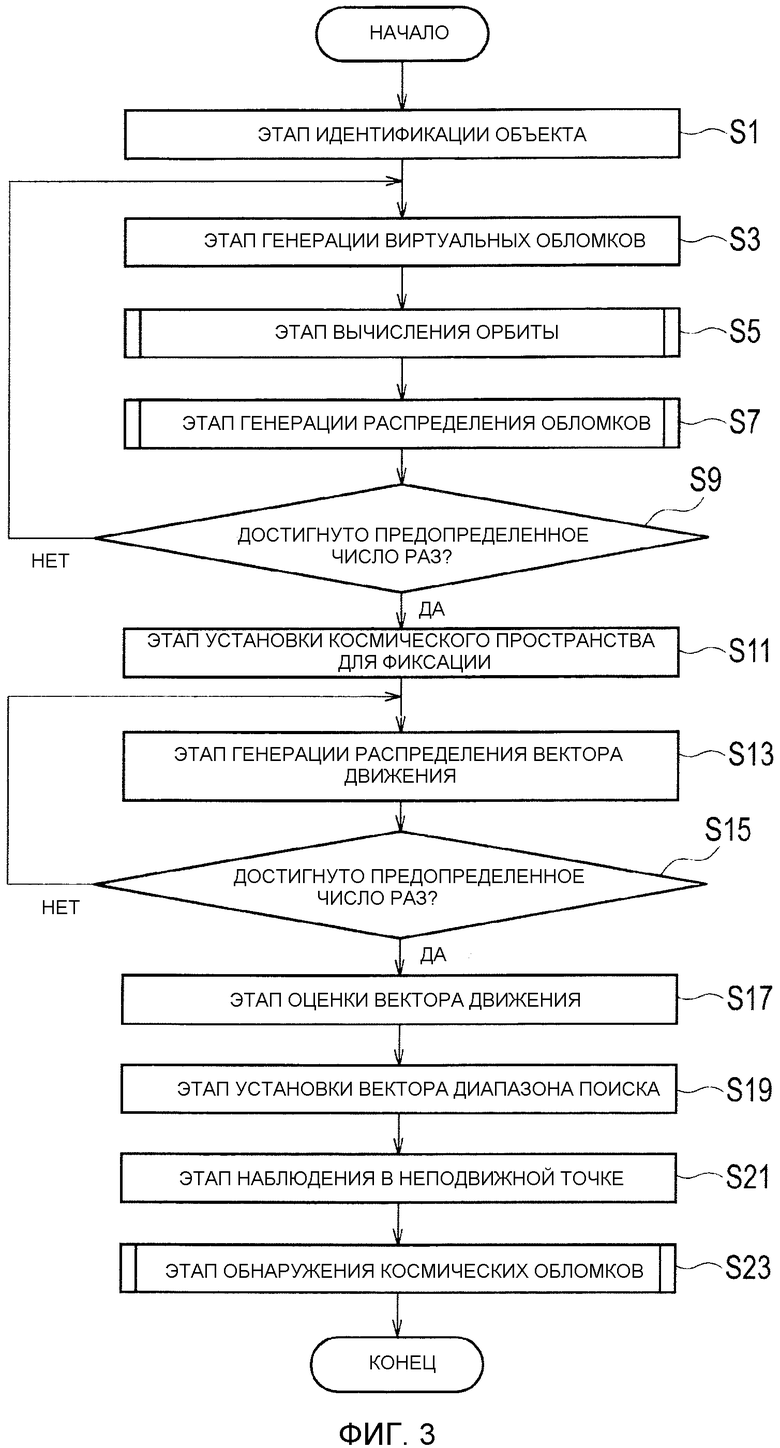
Фиг.3 - блок-схема алгоритма, представляющая процедуры способа обнаружения космических обломков согласно одному варианту осуществления настоящего изобретения.
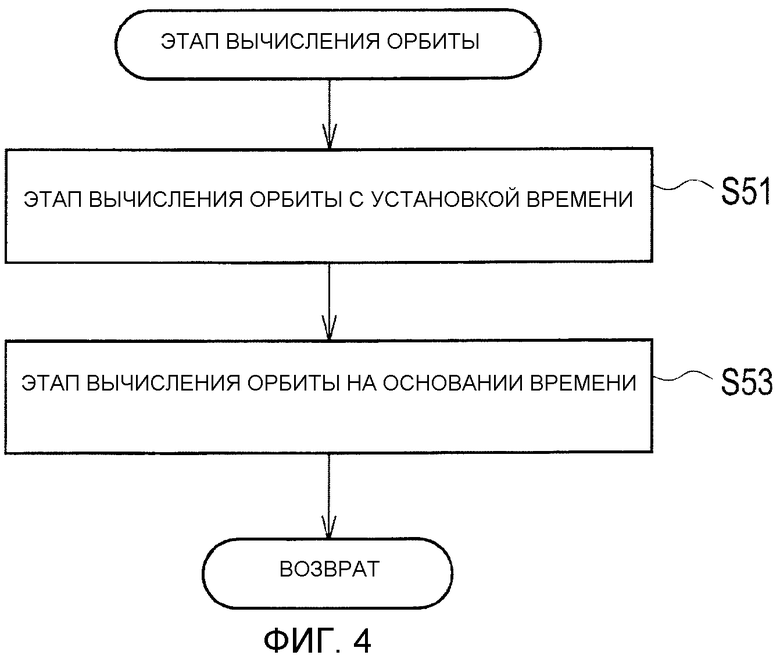
Фиг.4 - блок-схема алгоритма, представляющая процедуры этапа вычисления орбиты на фиг.3.
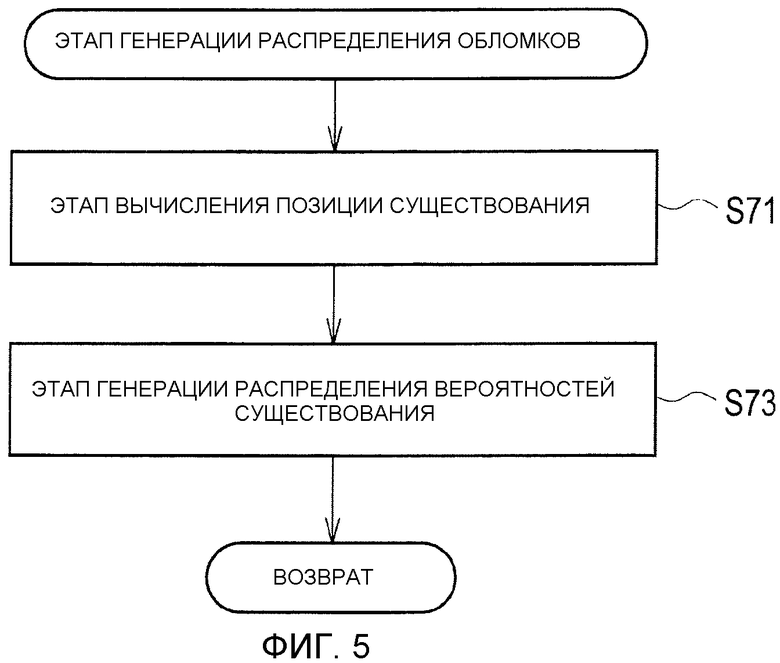
Фиг.5 - блок-схема алгоритма, представляющая процедуры этапа генерации распределения обломков на фиг.3.
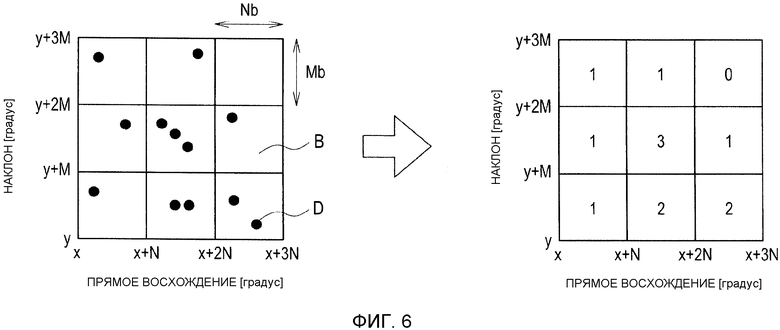
Фиг.6 - поясняющий вид двумерной гистограммы, представляющей распределение виртуальных космических обломков в направлениях прямого восхождения и наклона, которое выполняется при генерации распределения вероятностей существования по фиг.8.
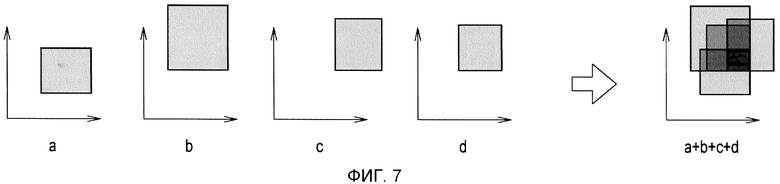
Фиг.7 - поясняющий вид, представляющий процедуры для объединения распределения виртуальных космических обломков с использованием двумерных гистограмм на фиг.6, которые генерируются многократно в соответствии с моделированием по методу Монте-Карло.
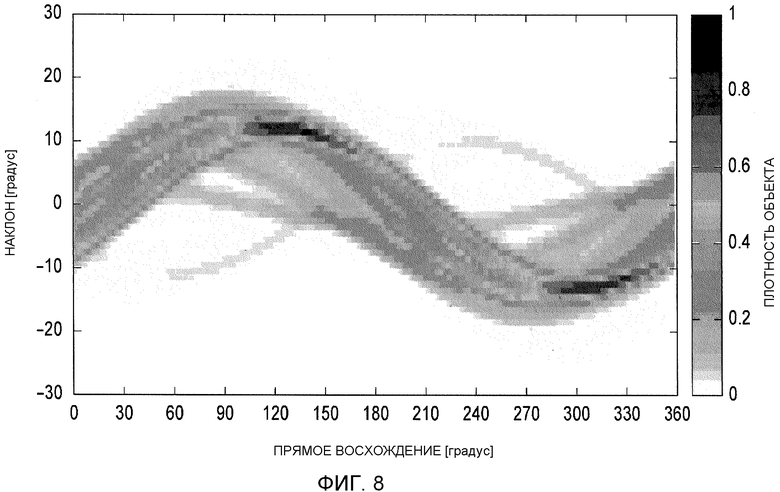
Фиг.8 - поясняющий вид, представляющий распределение вероятностей существования виртуальных космических обломков на небесной сфере во время наблюдения в неподвижной точке, которое получено посредством объединения, представленного на фиг.7.
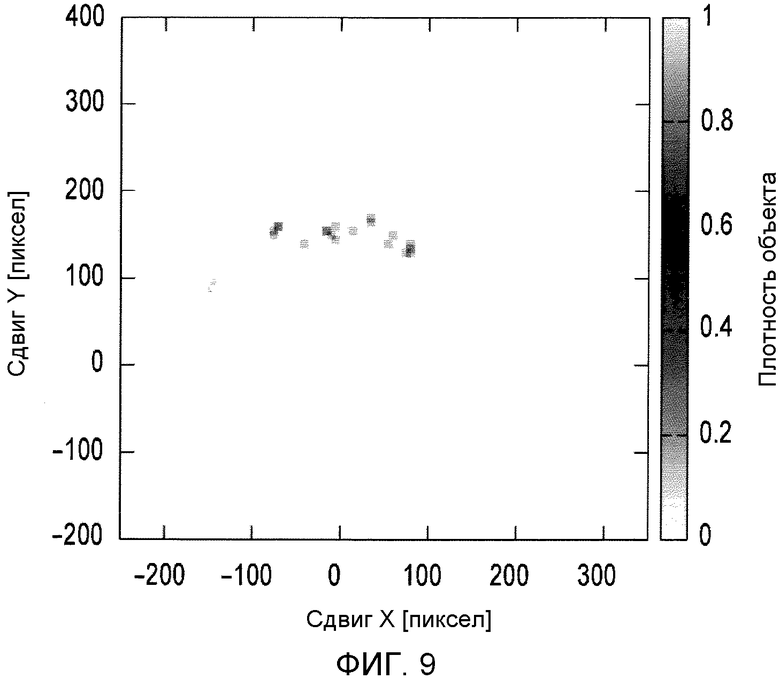
Фиг.9 - диаграмма, представляющая пример распределения в случае, когда распределение вероятностей существования виртуальных космических обломков генерируется только один раз с использованием двумерной гистограммы на фиг.6.
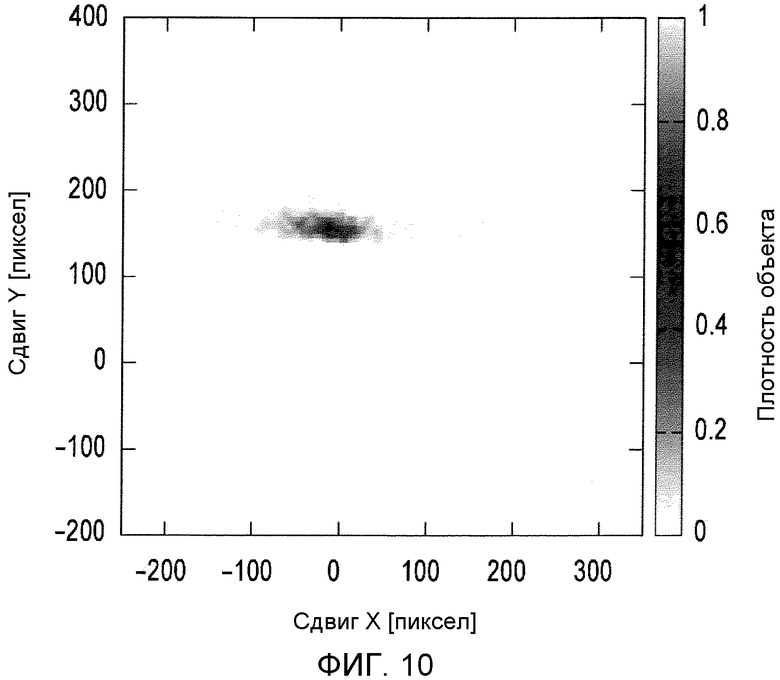
Фиг.10 - диаграмма, представляющая пример распределения в случае, когда распределение вероятностей существования виртуальных космических обломков генерируется многократно в соответствии с моделированием по методу Монте-Карло с использованием двумерной гистограммы по фиг.6.
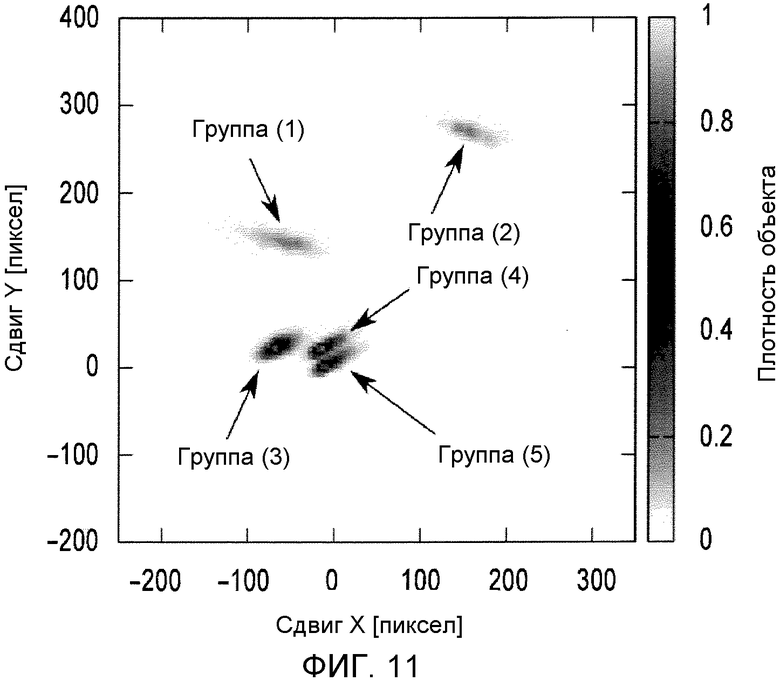
Фиг.11 - диаграмма, представляющая пример распределения в случае, когда распределение вероятностей существования виртуальных космических обломков, генерируемых многократно в соответствии с моделированием по методу Монте-Карло, представляет распределение, которое является рассредоточенным по множеству групп.
Фиг.12 - блок-схема алгоритма, представляющая процедуры этапа обнаружения космических обломков на фиг.3.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже со ссылкой на чертежи описывается один вариант осуществления настоящего изобретения.
Сначала, в качестве типичного примера обработки для обнаружения космических обломков исходя из множества изображений, фиксируемых в интервалах времени, посредством обработки изображения, со ссылкой на поясняющий вид по фиг.1, описывается основная идея обработки для обнаружения космических обломков с применением способа наложения.
Оптическое наблюдение с земли широко используется как способ обнаружения космических обломков на геостационарной орбите. Изображения, фиксируемые во время наблюдения, подвергают обработке изображения и посредством распознавания космических обломков на фоне на основе яркости обнаруживают космические обломки. Однако на изображениях могут существовать темные космические обломки, очень мало отличающиеся от фона по яркости и, следовательно, являющиеся неразличимыми на фоне. Способ наложения является известным, как способ, посредством которого можно обнаружить такие темные космические обломки.
Здесь предполагается, что фрагмент D космических обломков, являющийся целью обнаружения, имеет малую яркость, которая является слишком темной для обнаружения его посредством одного изображения. Как представлено в поясняющем виде по фиг.1, в способе наложения, множество изображений А1-A4 фиксируют в коротких интервалах времени во время наблюдения в неподвижной точке посредством CCD-камеры или аналогичной так, что фрагмент D космических обломков появляется в виде линейно движущегося объекта. Здесь, как представлено на фиг.1, предполагается, что каждое из изображений А1-A4 имеет размер изображения X [пикселов] в горизонтальном направлении и Y [пикселов] в вертикальном направлении. Тогда делается предположение о векторе p (= Δx [пиксел], Δy [пиксел]) движения фрагмента D космических обломков, соответствующем интервалам фиксации изображений А1-A4, и множество изображений А1-A4 накладываются друг на друга в хронологическом порядке в соответствии с вектором движения p. Другими словами, изображения А1-A4 накладываются друг на друга со сдвигом последовательно на величину, соответствующую вектору p движения фрагмента D космических обломков.
После этого вычисляются средние значения яркости в изображениях А1-A4 для объединения в одно изображение A. Здесь основные элементы, составляющие яркость фона, являются составляющими шума. В объединенном изображении A составляющие шума фона сглаживаются, посредством чего яркость фона снижается. Соответственно, фрагмент D космических обломков как цель обнаружения можно распознать на фоне на основе яркости. Фрагмент D космических обломков может быть обнаружен исходя из множества фиксируемых изображений А1-A4 посредством последовательности процедур, описанных выше.
Например, если на изображениях А1-A4 появляется яркий неподвижный объект, например, фиксированная звезда, то изображения объекта в идентичных позициях наложенных изображений А1-A4 не накладываются друг на друга. Соответственно, в ходе объединения в одно изображение А яркость пикселов там, где появляются изображения фиксированной звезды и т.п., снижается в результате усреднения с фоном. Соответственно, яркость фрагмента D космических обломков, который появляется в идентичных позициях наложенных изображений А1-A4, больше, чем яркость фона.
Вместе с тем, для того чтобы сделать предположение о векторе p движения фрагмента D космических обломков, требуется критическая точка способа наложения. Так как фрагмент D космических обломков на изображениях имеет различные величины и направления движения, нельзя сделать предположение о векторе p движения в виде одного значения, и, следовательно, требуется определить область поиска, определяемую двумя переменными (Δx, Δy), которые являются компонентами вектора p движения.
Не существует способа для того, чтобы должным образом сделать предположение относительно области поиска для вектора p движения неразличимо темного фрагмента D космических обломков исходя из одного изображения. Соответственно, как представлено на фиг.2, области Sa поиска, требуемой в случае неприменения моделирования обломков, требуется определение области поиска посредством вектора p движения, имеющего в два раза больший размер, чем размер (X, Y) фиксации одного изображения, максимум.
Поиск фрагмента D космических обломков в области поиска этого размера требует для анализа нереалистичного периода времени. Для выполнения аналитической обработки большого объема фиксируемых изображений, получаемых за одну ночь, при использовании одного универсального компьютера, когда применятся область поиска вышеописанного размера, обычно требуется от нескольких месяцев до нескольких лет.
Способ обнаружения космических обломков согласно одному варианту осуществления настоящего изобретение, которое описано ниже, должным образом оценивает вектор p движения фрагмента D космических обломков с применением способов моделирования обломков (модель разрушения на обломки и модель прохождения орбиты обломков) и существенно сужает область поиска для вектора p движения, как представлено на фиг.2, как область Sb поиска, которая требуется во время применения моделирования обломков.
Время, необходимое для аналитической обработки, является пропорциональным площади области поиска для вектора p движения. Соответственно, с выбором способа обнаружения варианта осуществления, который будет описан ниже, время для анализа может быть сокращено максимум до нескольких процентов времени, требуемого, когда моделирование обломков не применяется. Следовательно, для анализа требуется только реалистический период времени, в результате чего, при анализе большого объема изображений наблюдения, снятых за несколько дней, в пределах ограниченного периода времени, с использованием нескольких универсальных компьютеров, может быть обнаружен обломок, имеющий малую яркость.
Для этого в способе обнаружения космических обломков согласно варианту осуществления последовательно исполняются этап идентификации объекта (этап S1), этап генерации виртуальных обломков (этап S3), этап вычисления орбиты (этап S5) и этап генерации распределения обломков (этап S7), как представлено в блок-схеме по фиг.3. Здесь, этап генерации виртуальных обломков и последующие этапы повторно исполняются в соответствии с моделированием по методу Монте-Карло до тех пор, пока на этапе S9 не будет подтверждено (ДА), что число повторений достигло предопределенного числа раз (например, 60 раз).
Кроме того, в способе обнаружения космических обломков согласно варианту осуществления этап установки космического пространства для фиксации (этап Sll) исполняется после того, как этап генерации виртуальных обломков и последующие этапы были повторно исполнены предопределенное число раз (ДА на этапе S9).
Кроме того, в способе обнаружения космических обломков согласно варианту осуществления после исполнения этапа установки космического пространства для фиксации на этапе Sll этап генерации распределения вектора движения (этап S13) повторно исполняется в соответствии с моделированием по методу Монте-Карло до тех пор, пока на этапе S15 не будет подтверждено (ДА) то, что число повторений достигло предопределенного числа раз (например, 60 раз).
Далее, после повторного исполнения предопределенное число раз (ДА на этапе S15) этапа генерации распределения вектора движения на этапе S13, исполняется этап оценки вектора движения (этап S17), этап установки вектора диапазона поиска (этап S19), этап наблюдения в неподвижной точке (этап S21) и этап обнаружения космических обломков (этап S23).
Среди этих этапов, на этапе идентификации объекта, на этапе S1, идентифицируют объект, возникший в результате разрушения, который вероятно разрушился на геоцентрической орбите в прошлом. Более точно, список объектов (космических кораблей), которые вероятно разрушились в прошлом, составляется из опубликованных документов и т.п. После этого исходя из него идентифицируют объект, возникший в результате разрушения.
Далее, на этапе генерации виртуальных обломков, на этапе S3, для генерации виртуального фрагмента D космических обломков, к внесенному в список объекту, возникшему в результате разрушения, применяется модель разрушения на обломки в соответствии с законом сохранения массы. Модель разрушения на обломки включает в себя последовательность функциональных выражений для вычисления размера, отношения площади к массе, средней площади поперечного сечения, массы и скорости выброса фрагмента (виртуального фрагмента D космических обломков), выбрасываемого в момент, когда с искусственным объектом (космическим кораблем), движущемся по орбите вокруг земли, происходит событие разрушения, например взрыв или столкновение. В качестве модели разрушения на обломки может использоваться модель разрушения стандарта НАСА, принятая Национальным управлением по аэронавтике и исследованию космического пространства (НАСА).
В вышеописанной модели разрушения на обломки, если масса искусственного объекта, движущегося по орбите вокруг земли, известна заранее, то размер фрагмента, который вероятно должен быть сгенерирован, однозначно вычисляется исходя из модели распределения размера модели разрушения.
При этом в вышеописанной модели разрушения на обломки модель распределения отношения площади к массе является функцией размера. Однако так как диапазон отношения площади к массе и плотность вероятности определяются как суперпозиция двух факторов нормального распределения, отношение площади к массе не может быть вычислено однозначно. Соответственно, отношение площади к массе определяется с использованием случайных чисел, генерируемых с учетом диапазона отношения площади к массе и плотности вероятности.
Кроме того, в вышеописанной модели разрушения на обломки средняя площадь поперечного сечения однозначно определяется как функция размера. Масса фрагмента вычисляется при делении средней площади поперечного сечения на отношение площади к массе.
Определение отношения площади к массе, идентификация средней площади поперечного сечения с использованием определенного отношения площади к массе в функции размера и вычисление массы фрагмента с использованием определенного отношения площади к массе и идентифицированной средней площади поперечного сечения повторяются до тех пор, пока полная масса фрагментов не достигнет массы искусственного объекта. Соответственно, с предположением того, что масса объекта, возникшего в результате разрушения, равна M, и масса виртуального фрагмента i космических обломков равна mi, количество N фрагментов, которые должны быть сгенерированы, а именно виртуальных фрагментов i космических обломков, равно значению, которое удовлетворяет следующей формуле (где i = 1, 2, 3,..., N):
M= m1 + m2 + m3 +... + mN .
При этом в вышеописанной модели разрушения на обломки модель распределения скорости выброса является функцией отношения площади к массе. Однако так как диапазон скорости выброса фрагмента и плотности вероятности определяется как одно нормальное распределение, скорость выброса не может быть вычислена однозначно. Соответственно, скорость выброса определяется с использованием случайных чисел, генерируемых с учетом диапазона скорости выброса и плотности вероятности, при определении отношения площади к массе.
Виртуальные космические обломки, которые имеют параметры вектора положения и вектора скорости в инерциальном пространстве, характеристическая длина (размер), отношение площади к массе, масса и средняя площадь поперечного сечения генерируются посредством вышеупомянутых процедур.
Для вычисления геоцентрической орбиты виртуального фрагмента D космических обломков во время наблюдения в неподвижной точке, на этапе S5 исполняется этап вычисления орбиты. В частности, для периода от оцененного времени начала до оцененного времени окончания наблюдения в неподвижной точке, орбита (траектория), где существует каждый виртуальный фрагмент D космических обломков, спрогнозированный на этапе S3, находится при вычислении с использованием модели прохождения орбиты.
Как представлено в блок-схеме по фиг.4, этап вычисления орбиты включает в себя этап вычисления орбиты с установкой времени (этап S51) и этап вычисления орбиты на основании времени (этап S53).
На этапе вычисления орбиты с установкой времени, на этапе S51, вычисление орбиты выполняется для каждого виртуального фрагмента D космических обломков, сгенерированного на этапе S3, для периода от точки разрушения до оцененного времени начала наблюдения в неподвижной точке. При этом на этапе вычисления орбиты на основании времени, на этапе S53, вычисление орбиты выполняется для каждого виртуального фрагмента D космических обломков на основе моментов времени (временных шагов) в регулярных интервалах времени для периода от оцененного времени начала наблюдения в неподвижной точке, для которого вычисление орбиты выполняется на этапе S51, до оцененного времени окончания наблюдения в неподвижной точке. В этом варианте осуществления моменты времени соответственно соответствуют временам для фиксации изображений А1-A4 наблюдаемого космического пространства в интервалах времени во время наблюдения в неподвижной точке.
Этап генерации распределения обломков, на этапе S7 по фиг.3, выполняется для определения того, какое космическое пространство на небесной сфере должно фиксироваться во время наблюдения в неподвижной точке, на этапе установки космического пространства для фиксации, на этапе S11, который описан ниже. Более точно, на этом этапе генерируется распределение вероятностей существования виртуального фрагмента D космических обломков, которое представляет позицию на небесной сфере, в которой во время наблюдения в неподвижной точке существует виртуальный фрагмент D космических обломков.
Как представлено в блок-схеме Фиг.5, этап генерации распределения обломков включает в себя этап вычисления позиции существования (этап S71) и этап генерации распределения вероятностей существования (этап S73).
На этапе вычисления позиции существования, на этапе S71, вычисляются позиции существования каждого виртуального фрагмента D космических обломков на небесной сфере в соответствующие моменты времени во время наблюдения в неподвижной точке на основе результата вычисления орбиты для каждого виртуального фрагмента D космических обломков в моменты времени в регулярных интервалах времени в период от оцененного времени начала до оцененного времени окончания наблюдения в неподвижной точке, вычисляемой на этапе S53 по фиг.4.
В частности, вычисляется позиция существования (в виде расстояния, прямого восхождения и наклона из начала системы координат) каждого виртуального фрагмента D космических обломков на небесной сфере во время наблюдения в неподвижной точке посредством вычисления вектора положения и вектора скорости каждого виртуального фрагмента D космических обломков в каждый момент времени, полученный при вычислении орбиты на этапе S53, для преобразования координат из геоцентрической инерционной системы координат в систему координат экваториальной плоскости.
Распределение вероятностей существования позиции существования фрагмента D космических обломков на небесной сфере, вычисляемой на этапе S71, генерируется на этапе генерации распределения вероятностей существования, на этапе S73. Более точно, в отношении двух переменных формируется гистограмма, представленная в поясняющем виде по фиг.6, а именно прямого восхождения и наклона, при этом позиции существования виртуального фрагмента D космических обломков на небесной сфере во время наблюдения в неподвижной точке вычисляются на этапе S71.
Обеспечена двумерная гистограмма по фиг.6 с девятью (3×3) ячейками В посредством указания переменной наклона в направлении вертикальной оси, указания переменной прямого восхождения в направлении горизонтальной оси и разделения диапазона каждой переменной на три участка. Предполагается, что размер каждой ячейки В равен NbxMb. Далее, для каждого из моментов времени во время наблюдения в неподвижной точке подсчитывается количество виртуальных фрагментов D космических обломков, расположенных в каждой из ячеек В на двумерной гистограмме по фиг.6, на основе позиций существования виртуальных фрагментов D космических обломков, вычисляемых на этапе S71. Распределение вероятностей существования виртуальных фрагментов D космических обломков на небесной сфере во время наблюдения в неподвижной точке генерируется посредством формирования гистограммы, как описано выше. Сгенерированное распределение вероятностей существования используется на этапе определения космического пространства для фиксации, на этапе Sll по фиг.3, описанном ниже.
Здесь, размер гистограммы прямого восхождения и наклона, имеющий 3*3=9 ячеек В, описанный выше, может быть выровнен, например, с полем зрения CCD-камеры и т.п., используемой для фиксации изображений А1-A4.
На этапе установки космического пространства для фиксации, на этапе Sll по фиг.3, находят кумулятивное распределение распределения вероятностей существования виртуального фрагмента D космических обломков на небесной сфере во время наблюдения в неподвижной точке, которое на этапе S73 по фиг.5 генерируется предопределенное число раз. Поясняющий вид по фиг.7 представляет пример суммирования четырех образцов сгенерированных распределений вероятностей существования a-d. После суммирования может быть получено кумулятивное распределение фрагментов D космических обломков на небесной сфере, например, посредством нормализации, при которой значения соответствующих ячеек B делятся на репрезентативное значение, например, максимальное значение из всех ячеек B.
Как описано выше, в этом варианте осуществления представлен пример исполнения этапа генерации распределения обломков на этапе S7 по фиг.3 численным методом. В частности, в варианте осуществления описаны элементы содержимого численного вычисления вероятности существования виртуальных фрагментов D космических обломков и нахождения его распределения с использованием гистограммы. Однако этап генерации распределения обломков (этап S7) также может быть исполнен аналитическим методом. В частности, можно аналитически вычислять время, когда виртуальный фрагмент D космических обломков пролетает через некоторое местоположение при конкретном прямом восхождении и наклоне, и находить распределение вероятностей существования виртуального фрагмента D космических обломков на небесной сфере на основе результата вычисления.
Фиг.8 является поясняющим видом, представляющим распределение вероятностей существования виртуального фрагмента D космических обломков на небесной сфере, полученное при моделировании кумулятивного распределения вероятностей существования виртуального фрагмента D космических обломков на небесной сфере во время наблюдения в неподвижной точке, найденное, как описано выше. В поясняющем виде глубина цвета, представленного на шкале с правой стороны, указывает уровни в распределении вероятностей существования виртуального фрагмента D космических обломков.
Соответственно, на этапе установки космического пространства для фиксации, на этапе Sll по фиг.3, космическое пространство (в виде прямого восхождения и наклона) включает в себя область в поясняющем виде по фиг.8, в которой распределение вероятностей существования виртуального фрагмента D космических обломков является большим, как космического пространства для фиксации изображений А1-A4 во время наблюдения в неподвижной точке. Соответственно, можно увеличить вероятности появления фактических фрагментов D космических обломков на изображениях А1-A4, фиксируемых во время наблюдения в неподвижной точке. Здесь, предпочтительно установить космическое пространство для фиксации так, чтобы исключить чрезвычайно яркий астрономический объект из космического пространства для фиксации. Кроме того, предпочтительно, чтобы космическое пространство для фиксации устанавливалось с учетом ограничений поля зрения, в свете угла возвышения и азимутального угла обсерватории, где ведется наблюдение в неподвижной точке.
Этап генерации распределения вектора движения, на этапе S13 по фиг.3, выполняется для определения диапазона, в котором виртуальный фрагмент D космических обломков вероятно движется на изображениях А1-A4, фиксируемых во время наблюдения в неподвижной точке, на этапе установки вектора диапазона поиска, на этапе S19, который будет описан ниже. В частности, на этом этапе генерируется распределение частоты появления вектора p движения каждого виртуального фрагмента D космических обломков во время наблюдения в неподвижной точке.
На этапе генерации распределения вектора движения генерируется распределение частоты появления вектора движения, которым обладает фрагмент D космических обломков, в отношении каждого виртуального фрагмента D космических обломков, существующего в космическом пространстве для фиксации изображений А1-A4 во время наблюдения в неподвижной точке, установленного на этапе Sll по фиг.3, причем космическое пространство выбирается исходя из позиций существования виртуального фрагмента D космических обломков на небесной сфере в соответствующие моменты времени во время наблюдения в неподвижной точке, вычисляемых на этапе S71 по фиг.5.
В частности, вектор p движения каждого виртуального фрагмента D космических обломков на изображениях А1-A4 вычисляется при применении к результату вычисления на этапе S53 по фиг.4 последовательности процедур: геоцентрическая инерционная система координат, геоцентрическая фиксированная система координат, система координат экваториальной плоскости, взятие интеграла по времени от широты и долготы точки, расположенной непосредственно ниже, и преобразование масштабов. Вектор p движения, вычисленный таким способом, представляет распределение, которое развернуто на диаграмме, представленной на фиг.9. На диаграмме горизонтальная ось указывает компоненты направления X (Сдвиг X [пикселов]) вектора p движения, и вертикальная ось указывает компоненты направления Y (Сдвиг Y [пикселов]).
Далее, этап генерации распределения вектора движения на этапе S13 по фиг.3 повторяется до тех пор, пока на этапе S15 не будет подтверждено (ДА) то, что число повторений достигло предопределенного числа раз. Соответственно, кумулятивное распределение распределения частоты появления вектора p движения, которым обладает каждый виртуальный фрагмент D космических обломков, существующий в космическом пространстве для фиксации изображений во время наблюдения в неподвижной точке, получают, как представлено в диаграмме на фиг.10.
В каждой из диаграмм по фиг.9 и фиг.10 глубина цвета, представленная на шкале с правой стороны, указывает уровни в распределении частоты появления вектора p движения.
Далее, на этапе оценки вектора движения, на этапе S17 по фиг.3, оценивается вектор p движения виртуального фрагмента D космических обломков исходя из области (в виде Сдвига X [пикселов] и Сдвига Y [пикселов]), содержащей верхний уровень распределения частоты появления вектора p движения, на диаграмме на фиг.10.
На последующем этапе установки вектора диапазона поиска, на этапе S19 по фиг.3, вектор p движения, оцененный на этапе оценки вектора движения, на этапе S17, устанавливается как вектор диапазона поиска, который указывает компонент вектора в области Sb поиска на фиг.2 (т.е. область поиска, требуемая во время применения моделирования обломков).
В данном случае, когда существует множество объектов, возникших в результате разрушения, идентифицированных на этапе идентификации объекта, на этапе S1, распределение вектора p движения каждого виртуального фрагмента D космических обломков формируется в группу, соответствующую каждому из объектов, возникших в результате разрушения, как представлено в диаграмме по фиг.11. В этом случае, в качестве диапазона поиска может быть установлено космическое пространство, включающее в себя область некоторой группы, имеющей самый высокий уровень распределения частоты появления вектора p движения. Следовательно, в качестве цели обнаружения определяется фактический фрагмент D космических обломков, сгенерированный из объекта, возникшего в результате разрушения, соответствующего некоторой группе. На этапе наблюдения в неподвижной точке, на этапе S21 по фиг.3, наблюдение в неподвижной точке осуществляется, когда определяется диапазон фиксации, устанавливаемый на этапе Sll, как космическое пространство для фиксации, предпочтительно в период от оцененного времени начала до оцененного времени окончания, описанный выше. В частности, изображения А1-A4 фиксируются в регулярных интервалах времени во время наблюдения в неподвижной точке в период от оцененного времени начала до оцененного времени окончания.
Как представлено в блок-схеме на фиг.12, последующий этап обнаружения космических обломков, на этапе S23, включает в себя этап обнаружения обломков большой яркости (этап S231), этап обработки наложения (этап S233) и этап обнаружения обломков малой яркости (этап S235).
На этапе обнаружения обломков большой яркости, на этапе S231, фрагмент космических обломков, имеющий большую яркость, которую можно обнаружить посредством обычной, высокоскоростной обработки, и общеизвестным способом анализа изображения, или общеизвестный фрагмент космических обломков, который уже зарегистрирован в базе данных орбитальных объектов, которой управляют Соединенные Штаты, которая им принадлежит и которая раскрыта ими, обнаруживают исходя из множества изображений А1-A4, фиксируемых в регулярных интервалах времени в ходе этапа наблюдения в неподвижной точке, на этапе S21 по фиг.3.
На этапе обработки наложения, на этапе S233, обнаруживают фактический фрагмент D космических обломков, появляющийся на изображениях А1-A4, посредством наложения изображений А1-A4 друг на друга в порядке фиксации при последовательном сдвиге изображений в направлении и на величину, указанные вектором диапазона поиска, устанавливаемым на этапе S19, и применения способа наложения в соответствии с процедурами, описанными в начале со ссылкой на фиг.1.
На этапе обнаружения обломков малой яркости, на этапе S235, все фрагменты D космических обломков, обнаруженные на этапе обработки наложения, на этапе S233, сравнивают с известными фрагментами D космических обломков, которые обнаруживают на этапе обнаружения обломков большой яркости, на этапе S231. После этого, только фрагмент D космических обломков, обнаруженный на этапе обработки наложения, на этапе S233, выводится как результат обнаружения.
Здесь также можно выводить все фрагменты D космических обломков, обнаруженные на этапе обработки наложения, на этапе S233, как результат обнаружения на этапе S235, с исключением этапа обнаружения обломков большой яркости на этапе S231. В этом случае, этап S235 больше не является этапом выведения только фрагмента D космических обломков малой яркости. В этом контексте этап S235 представляет "этап обнаружения обломков", вместо "этапа обнаружения обломков малой яркости".
Описаны процедуры способа обнаружения космических обломков согласно варианту осуществления. В способе обнаружения космических обломков этого варианта осуществления используется модель разрушения на обломки, как описано выше. Как изложено в связи с пояснением этапа S3, модель разрушения на обломки использует случайные числа для определения отношения площади к массе и скорости выброса. Поэтому группа фрагментов (виртуальные фрагменты D космических обломков), определенная таким способом, состоит из случайной комбинации. Такая случайная комбинация может быть самым подходящим способом для наблюдения, если комбинация отражает точное вычисление фактического разрушения (фактические фрагменты D космических обломков). Тем не менее, это предположение является крайне маловероятным. Следовательно, результатом простого принятия модели разрушения на обломки может являться только план наблюдения за фрагментами D космических обломков, который оставляет все на волю случая.
Для учета каждой возможности, важно найти необходимые связи исходя из многих случайных комбинаций в отношении отношения площади к массе и скорости выброса. План наблюдения, который обеспечивает возможность обнаружения фрагмента D космических обломков с большой вероятностью, может быть создан на основе нахождения таким способом необходимых связей (отношение площади к массе и скорость выброса). Кроме того, если необходимые связи (отношение площади к массе и скорость выброса) могут быть найдены, то можно оценить соответствующую величину движения (вектор p движения), которой обладает фрагмент D космических обломков, на основе этих необходимых связей, что является важным для уверенного обнаружения фрагмента D космических обломков, имеющего очень малую яркость (малое отношение S/N), исходя из изображений А1-A4, фиксируемых в регулярных интервалах времени во время наблюдения в неподвижной точке.
Соответственно, упомянутый вариант осуществления предназначен для оценки вектора p движения фрагмента D космических обломков на этапе оценки вектора движения, на этапе S17 по фиг.3. С этой целью, способ обнаружения космических обломков согласно упомянутому варианту осуществления включает в себя процедуры этапа S9 и этапа S15 по фиг.3 при использовании метода Монте-Карло.
В частности, каждый этап генерации виртуальных обломков, на этапе S3, этап вычисления орбиты, на этапе S5, и этап генерации распределения вектора движения, на этапе S13, которые необходимы для оценки вектора p движения на этапе S17 по фиг.3, повторно исполняется предопределенное число раз посредством подтверждения на этапе S9 или на этапе S15 (моделирование по методу Монте-Карло).
Для увеличения вероятности того, что фактический фрагмент D космических обломков появляется на изображениях А1-A4, фиксируемых во время наблюдения в неподвижной точке, в упомянутом варианте осуществления предусматривается получение распределения вероятностей существования виртуального фрагмента D космических обломков в соответствующие моменты времени во время наблюдения в неподвижной точке при повторном исполнении каждого из этапа генерации виртуальных обломков, на этапе S3, этапа вычисления орбиты, на этапе S5, и этапа генерации распределения обломков, на этапе S7, предопределенное число раз посредством подтверждения на этапе S9 (моделирование по методу Монте-Карло).
После этого на этапе установки космического пространства для фиксации, на этапе Sll, устанавливается космическое пространство (в виде прямого восхождения и наклона), имеющее верхний уровень распределения вероятностей существования виртуального фрагмента D космических обломков, как космическое пространство для фиксации изображений А1-A4 во время наблюдения в неподвижной точке, на основе кумулятивного распределения вероятностей существования виртуального фрагмента D космических обломков, полученного при неоднократном исполнении этапа S3, этапа S5 и этапа S7.
Хотя эта конфигурация может быть исключена, с обеспечением такой конфигурации, как в этом варианте осуществления, можно улучшить вероятность того, что фактический фрагмент D космических обломков появляется на изображениях А1-A4, фиксируемых во время наблюдения в неподвижной точке.
Согласно способу обнаружения космических обломков вышеописанного варианта осуществления, с использованием способа наложения фрагмент D космических обломков, имеющий малую яркость, может быть обнаружен эффективно и посредством простой обработки исходя из множества изображений А1-A4 космического пространства для наблюдения, фиксируемых в интервалах времени во время наблюдения в неподвижной точке.
В частности, распределение частоты появления вектора движения на небесной сфере, когда каждый виртуальный фрагмент D космических обломков движется по орбите во время наблюдения в неподвижной точке в будущем, с исполнением этапа генерации виртуальных обломков, этапа вычисления орбиты и этапа генерации распределения вектора движения. Если существует вектор движения, имеющий верхний уровень распределения частоты появления в кумулятивном распределении частот появления вектора движения, полученном при многократном выполнении вышеупомянутых этапов, то этот вектор движения с большой вероятностью является вектором движения фактического фрагмента космических обломков, который движется во время наблюдения в неподвижной точке.
Соответственно, с осуществлением перекрестного контроля фрагментов информации пиксела (соответствие или несоответствие значений пиксела идентичных пикселов) изображений, фиксируемых в интервалах времени во время наблюдения в неподвижной точке, можно увеличить вероятность обнаружения фрагмента космических обломков, появляющегося на изображениях, при последовательном сдвиге в них областей в порядке фиксации в направлении и на величину вектора движения виртуального фрагмента космических обломков, имеющего верхний уровень распределения частоты появления во время наблюдения в неподвижной точке. Соответственно, фрагмент космических обломков может быть обнаружен эффективно и посредством простой обработки исходя из множества изображений космического пространства для наблюдения, фиксируемых в интервалах времени во время наблюдения в неподвижной точке.
Кроме того, можно увеличить вероятность того, что фрагменты фрагмента космических обломков, появляющиеся на соответствующих изображениях, накладываются друг на друга в идентичных пикселах при применении способа наложения к областям соответствующих изображений, фиксируемых в интервалах времени во время наблюдения в неподвижной точке, причем эти области последовательно сдвигают в порядке фиксации в направлении и на величину вектора диапазона поиска, установленного на основе вектора движения оцененного фрагмента космических обломков. Соответственно, фрагмент космических обломков может быть обнаружен эффективно и посредством простой обработки с использованием способа наложения исходя из множества изображений космического пространства для наблюдения, фиксируемых в интервалах времени во время наблюдения в неподвижной точке.
При этом вектор диапазона поиска определяется на основе диапазона, имеющего верхний уровень распределения частоты появления вектора движения виртуального фрагмента космических обломков, в частности, в позиции на небесной сфере, где по прогнозам, во время наблюдения в неподвижной точке, существует виртуальный фрагмент космических обломков.
Соответственно, можно улучшить вероятность того, что вектор движения фактического фрагмента космических обломков, появляющегося на множестве изображений, фиксируемых во время наблюдения в неподвижной точке, совпадает с вектором диапазона поиска, посредством чего также улучшается вероятность обнаружения фрагмента космических обломков.
Кроме того, с исполнением этапа генерации виртуальных обломков, этапа вычисления орбиты и этапа генерации распределения обломков, может быть получено распределение вероятностей существования каждого виртуального фрагмента космических обломков на небесной сфере, когда виртуальный фрагмент космических обломков движется по орбите во время наблюдения в неподвижной точке в будущем. Область, имеющую верхний уровень распределения вероятностей существования виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке, полученную при многократном исполнении вышеупомянутой последовательности обработки, можно рассматривать как область, где с большой вероятностью, во время наблюдения в неподвижной точке, существует фактический фрагмент космических обломков.
Соответственно, с установкой космического пространства, включающего в себя область, имеющую верхний уровень распределения вероятностей существования виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке как космического пространства для фиксации изображений во время наблюдения в неподвижной точке можно увеличить вероятность того, что фактический фрагмент космических обломков появляется на изображениях, фиксируемых в интервалах времени во время наблюдения в неподвижной точке. Соответственно, фрагмент космических обломков может быть обнаружен эффективно и посредством простой обработки исходя из множества изображений космического пространства для наблюдения, фиксируемых в интервалах времени во время наблюдения в неподвижной точке.
При этом космическое пространство для фиксации изображений во время наблюдения в неподвижной точке устанавливается в космическое пространство, имеющее верхний уровень распределения вероятностей существования виртуального фрагмента космических обломков, в частности, в позиции на небесной сфере, где по прогнозам, во время наблюдения в неподвижной точке, существует виртуальный фрагмент космических обломков.
Соответственно, с применением способа наложения можно увеличить вероятность того, что космическое пространство для фиксации изображений во время наблюдения в неподвижной точке совпадает с космическим пространством, где во время наблюдения в неподвижной точке существует фактический фрагмент космических обломков, посредством чего вероятность обнаружения фрагмента космических обломков также увеличивается.
Вместе с тем, ввиду возможности расширения базы данных орбитальных объектов посредством регистрации в базе данных орбитальных объектов нового обнаруженного фрагмента D космических обломков, имеющего малую яркость, способ обнаружения космических обломков этого варианта осуществления является чрезвычайно полезным.
В варианте осуществления описан случай обнаружения фрагмента космических обломков с применением способа наложения к изображениям А1-A4, фиксируемым в регулярных интервалах времени во время наблюдения в неподвижной точке. Однако настоящее изобретение также может быть применено к случаю обнаружения фрагмента D космических обломков с применением способа обработки изображения, отличающегося от способа наложения, например, оптический поток согласно градиентному методу или методу проверки блоков на соответствие к изображениям А1-A4.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА АСТЕРОИДНО-КОМЕТНОЙ ОПАСНОСТИ | 2014 |
|
RU2573509C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2013 |
|
RU2589736C1 |
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
| Способ обнаружения опасных небесных тел, приближающихся к Земле с дневного неба, и космическая система для его реализации СОДА-2 | 2017 |
|
RU2675205C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2013 |
|
RU2618927C2 |
| Способ построения космической системы обзора небесной сферы для обнаружения небесных тел, приближающихся со стороны Солнца и угрожающих столкновением с Землей | 2017 |
|
RU2660090C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНЫХ СИТУАЦИЯХ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И НА ЗЕМЛЕ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570009C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| Космическая система обзора небесной сферы для обнаружения небесных тел | 2015 |
|
RU2621464C1 |

Изобретение относится к способу обнаружения космических обломков. Технический результат - обнаружение космических обломков на геоцентрической орбите. Способ обнаружения космических обломков включает в себя генерацию виртуального фрагмента космических обломков в соответствии с законом сохранения массы с применением модели разрушения на обломки к объекту, возникшему в результате разрушения, вычисление орбиты каждого виртуального фрагмента космических обломков во время наблюдения в неподвижной точке с применением модели прохождения орбиты обломков к виртуальному фрагменту космических обломков и генерацию распределения частоты появления вектора движения каждого виртуального фрагмента космических обломков на небесной сфере на основе результата вычисления орбиты, установку вектора диапазона поиска на основе вектора движения, имеющего верхний уровень распределения частоты появления вектора движения, и применение способа наложения к областям в изображениях, фиксируемых в интервалах времени во время наблюдения в неподвижной точке. 4 з.п. ф-лы, 12 ил.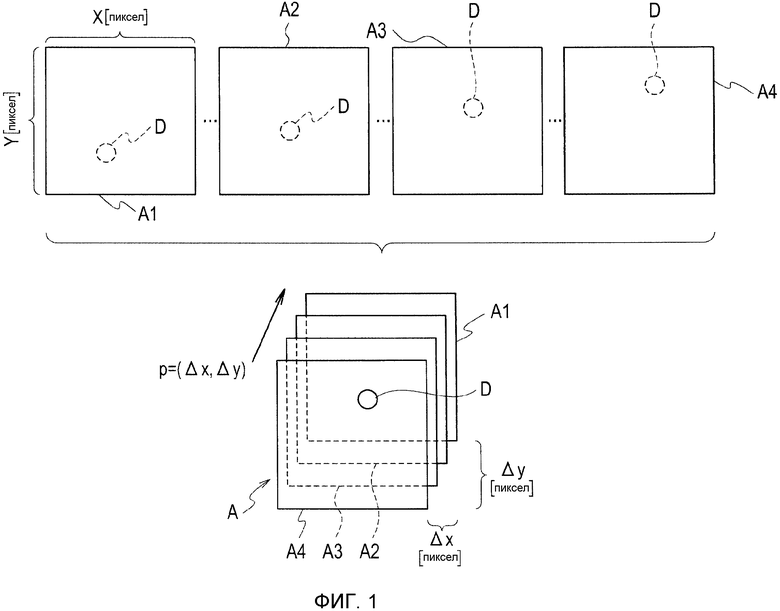
1. Способ обнаружения космических обломков на геоцентрической орбите, причем эти космические обломки появляются на множестве изображений, фиксируемых в интервалах времени во время наблюдения в неподвижной точке, причем этот способ содержит:
этап идентификации объекта, заключающийся в идентификации объекта, возникшего в результате разрушения, который вероятно разрушился на геоцентрической орбите в прошлом,
этап генерации виртуальных обломков, заключающийся в генерации виртуального фрагмента космических обломков в соответствии с законом сохранения массы с применением модели разрушения на обломки к объекту, возникшему в результате разрушения, идентифицированному на этапе идентификации объекта,
этап вычисления орбиты, заключающийся в применении модели прохождения орбиты обломков к каждому виртуальному фрагменту космических обломков, сгенерированному на этапе генерации виртуальных обломков, посредством чего вычисляется орбита виртуального фрагмента космических обломков во время наблюдения в неподвижной точке,
этап генерации распределения вектора движения, заключающийся в генерации распределения частоты появления вектора движения каждого виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке на основе результата вычисления орбиты на этапе вычисления орбиты,
этап оценки вектора движения, заключающийся в оценке вектора движения фрагмента космических обломков на изображениях на основе вектора движения, имеющего высокий уровень в распределении частоты появления, на основе кумулятивного распределения множества результатов распределения частоты появления вектора движения, получаемого при многократном выполнении этапа генерации виртуальных обломков, этапа вычисления орбиты и этапа генерации распределения вектора движения, и
этап обнаружения, заключающийся в осуществлении перекрестной проверки фрагментов информации пиксела на соответствующих областях в изображениях, фиксируемых в интервалах времени во время наблюдения в неподвижной точке, причем эти области последовательно сдвигают в направлении и на величину оцененного вектора движения в порядке фиксации, посредством чего на геоцентрической орбите обнаруживают космические обломки, появляющиеся на изображениях.
2. Способ обнаружения космических обломков по п.1, дополнительно содержащий:
этап установки вектора диапазона поиска, заключающийся в установке вектора диапазона поиска на основе оцененного вектора движения, причем упомянутый вектор диапазона поиска указывает направление движения и величину движения диапазона поиска космических обломков, появляющихся на изображениях, причем
этап обнаружения включает в себя применение способа наложения на соответствующие области в изображениях, фиксируемых в интервалах времени во время наблюдения в неподвижной точке, причем эти области последовательно сдвигают в направлении и на величину установленного вектора диапазона поиска в порядке фиксации, посредством чего на геоцентрической орбите обнаруживают космические обломки, появляющиеся на изображениях.
3. Способ обнаружения космических обломков по п.1, в котором
этап вычисления орбиты включает в себя этап вычисления орбиты на основании времени, заключающийся в выполнении вычисления орбиты каждого виртуального фрагмента космических обломков, сгенерированного на этапе генерации виртуальных обломков, для каждого из моментов времени в регулярных интервалах времени в период от начала до окончания наблюдения в неподвижной точке, и
на этапе генерации распределения вектора движения генерируется распределение частоты появления вектора движения на основе результата вычисления орбиты в моменты времени на этапе вычисления орбиты на основании времени.
4. Способ обнаружения космических обломков по п.1, дополнительно содержащий:
этап генерации распределения обломков, заключающийся в генерации распределения вероятностей существования каждого виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке на основе результата вычисления орбиты на этапе вычисления орбиты, и
этап установки космического пространства для фиксации, заключающийся в установке космического пространства, включающего в себя область, имеющую высокий уровень в распределении вероятностей существования виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке, как космического пространства для фиксации изображений во время наблюдения в неподвижной точке на основе кумулятивного распределения множества результатов распределения вероятностей существования, полученных при многократном выполнении этапа генерации виртуальных обломков, этапа вычисления орбиты и этапа генерации распределения обломков, причем
упомянутые изображения получают посредством фиксации установленного космического пространства для фиксации в интервалах времени.
5. Способ обнаружения космических обломков по п.4, в котором
этап вычисления орбиты включает в себя этап вычисления орбиты на основании времени, заключающийся в выполнении вычисления орбиты каждого виртуального фрагмента космических обломков, сгенерированного на этапе генерации виртуальных обломков, для каждого из моментов времени в регулярных интервалах времени в период от начала до окончания наблюдения в неподвижной точке, и
этап генерации распределения обломков включает в себя:
этап вычисления позиции существования, заключающийся в вычислении позиции существования каждого виртуального фрагмента космических обломков на небесной сфере в каждый момент времени на основе результата вычисления орбиты в момент времени на этапе вычисления орбиты на основании времени, и
этап генерации распределения вероятностей существования, заключающийся в генерации распределения вероятностей существования каждого виртуального фрагмента космических обломков на небесной сфере во время наблюдения в неподвижной точке на основе результата вычисления на этапе вычисления позиции существования.
| СПОСОБ КУЛЬТИВИРОВАНИЯ ГРИБА RHIZOPUS ORYZAE | 2021 |
|
RU2814816C2 |
| JP 2003323625 A, 14.11.2003 | |||
| ФЕРРИТОВЫЙ МОНОКРИСТАЛЛИЧЕСКИЙ МАТЕРИАЛ | 1984 |
|
RU1167997C |
| JP 2002139319 A, 17.05.2002 | |||
| AU 200072495 A, 03.01.2002 | |||
| СПОСОБ РАЗРУШЕНИЯ ФРАГМЕНТОВ КОСМИЧЕСКОГО МУСОРА | 2002 |
|
RU2204508C1 |

