ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу обнаружения движущегося объекта исходя из захваченных изображений.
УРОВЕНЬ ТЕХНИКИ
Космические обломки являются недействующим искусственным объектом, который движется по орбите вокруг Земли. Обнаружение существования космических обломков является важным для бесперебойной работы космического корабля (искусственные спутники, космические станции, космические корабли многоразового пользования и т.п.). В одном способе из числа обычных способов обнаружения космических обломков существование космических обломков определяется посредством выделения частей высокой яркости соответственно из изображений, захваченных камерой на ПЗС (прибор с зарядовой связью), находящейся на Земле или на орбите.
Этот способ включает в себя: обрезание областей идентичного размера из трех или большего количества изображений, захваченных с интервалами времени в соответствии с перемещением движущегося объекта, например, космических обломков, и применение способа наложения к обрезанным областям изображения. При этом перемещение движущегося объекта является равномерным движением или подобным ему, имеющим векторы (скорости) движения в двумерном направлении, например в системе-координат xy. Более конкретно, обрезанные области изображения совмещают друг с другом, и оценивают срединное значение исходя из значений пиксела в идентичных пикселах по всем совмещенным областям изображения. Если соответственно оцененное срединное значение больше или равно заданному значению, то этот пиксел выделяют как пиксел, представляющий существование движущегося объекта (см., например, PTL 1 и PTL 2).
Способ наложения является широко используемым эффективным способом не только для обнаружения космических обломков, но также и для обнаружения движущегося объекта при низком уровне яркости в изображении. Кроме того, как описано выше, для обнаружения движущегося объекта в качестве значения оценки в способе наложения применяют срединное значение пиксела. Следовательно, упомянутый способ наложения не вызывает повышения значения оценки, даже если в некоторых из изображений происходит захват составляющей шума (например, в некоторых из изображений захвачена звезда или космический луч в космическом пространстве), в отличие от другого случая, в котором в качестве значения оценки используется среднее значение пиксела. Поэтому способ наложения является предпочтительным для предотвращения ошибочного обнаружения движущегося объекта из-за существования звезды или космического луча, которые могут быть там захвачены.
СПИСОК ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
PTL 1 Выложенная публикация японской патентной заявки № 2002-139319.
PTL 2 Выложенная публикация японской патентной заявки № 2003-323625.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
Как описано выше, при обнаружении движущегося объекта, исходя из множества изображений, захваченных с интервалами времени, с использованием упомянутого способа наложения, требуется совмещение областей, которые должны быть обрезаны из соответствующих изображений, со смещением на величину перемещения движущегося объекта в каждом интервале фотографирования изображения (захвата изображения) так, чтобы объекты, захваченные в изображениях, которые соответствуют объекту обнаружения, перекрывали друг друга. Однако, как это часто бывает, например, с космическими обломками о перемещении (направление вектора и скалярная величина) движущегося объекта заранее ничего не известно.
Поэтому области, подходящие для обрезания из изображений, которые обеспечивают возможность совмещения фотоснимков космических обломков как объекта обнаружения друг с другом со смещением, должны оцениваться методом проб и ошибок, то есть с обрезанием областей-кандидатов из соответствующих изображений и совмещением этих областей-кандидатов со смещением как в различных направлениях, так и на различную величину. Такой метод проб и ошибок требует огромной работы по обработке.
Предположим, например, случай, когда движущийся объект обнаруживают исходя из n изображений, каждое с размером изображения L=(Lx, Ly), посредством вышеупомянутого способа наложения. При этом предполагается то, что компоненты по направлению осей x и у скорости V движения, которые задаются V=(±Vx, ±Vy), когда скорость V движения движущегося объекта выражается с использованием расстояния, которое движущийся объект проходит за некоторый период времени, соответствует перекрытиям между фотоснимками этого движущегося объекта. В связи с этим также предположим случай, когда значение скорости V и значение размера L изображения задаются Vx=Vy=200 (то есть V=(±200, ±200)) и Lx=Ly=2000, соответственно, когда скорость V движения и размер L изображения выражаются с использованием упомянутого количества пикселов и количество изображений, которое должно быть использовано для обнаружения, задается n=32.
Когда расстояние, которое движущийся объект проходит за период времени, соответствующий перекрытиям, вычисляется посредством изменения и совмещения пикселов на основе "один к одному", для движущегося объекта можно предполагать скорости (±Vx)×(±Vy) V. В результате при оценке значений пиксела в соответствующих пикселах (Lx×Ly) для всех воображаемых скоростей количество необходимых обработок операций составляет
(2Vx)×(2Vy)×(LX)×(Ly)
=400×400×2000×2000=6,4×10^11.
Эти вычислительные обработки необходимы для каждого из n изображений. Соответственно, когда оценивают все значения пиксела во всех фотоснимках, общее количество необходимых вычислительных обработок задается умножением вышеупомянутого количества на 32, в результате чего получается примерно 2,0×10^13.
Кроме того, обработка оценки срединного значения исходя из значений пиксела в идентичных пиксельных позициях по всем n изображениям должна включать в себя: арифметическую обработку по сортировке n значений пиксела, и обработку по выбору значения, лежащего в средней точке в последовательности значений пиксела в результате сортировки расположенных в порядке возрастания (или убывания). Поэтому время, необходимое для вычисления, зависит от вычисления, необходимого для сортировки, и равно времени, необходимому для выполнения
nlog(n)
обработок сравнения и операций присваивания. Даже в случае, требующем наименьшего количества обработок, без сортировки значений в результате обработок сравнения, количество операций, необходимых для обработок сравнения и операций присваивания, в log(n) раз больше количества (n) операций, которые должны быть выполнены для оценки простого среднего значения пиксела. В обычных случаях значения в результате операции сравнения должны сортироваться, и при каждой сортировке значений дополнительно необходимо выполнение трех операций присваивания. Поэтому количество операций, необходимых для этой обработки, в несколько раз больше. Поэтому обработка становится задачей, отнимающей много времени.
Кроме того, для операции сравнения, для сортировки n значений пиксела, после обработки сравнения процессор выполняет упреждающее исполнение команд. Соответственно, после сравнения пары значений пиксела, выбранных из n значений пиксела, в зависимости от результата сравнения процессор выполняет упреждающее исполнение команд по "изменению порядка этих двух значений пиксела" или упреждающее исполнение команд по "не изменению порядка этих двух значений пиксела."
В связи с этим предположим случай, когда для пары значений пиксела процессор выполняет упреждающее исполнение команд по "изменению порядка этих двух значений пиксела". Если значения пиксела, как объект упреждающего исполнения команд, расположены в возрастающем или убывающем порядке, обратном по отношению к порядку, в котором процессор сортирует эти два значения пиксела, то упреждающее исполнение команд, выполняемое процессором, является успешным.
Однако, если изначально значения пиксела как объект упреждающего исполнения команд расположены в порядке, в котором эти значения пиксела должны сортироваться, то упреждающее исполнение команд, выполняемое процессором, является неудачным, так как: обработки, которые следуют за упреждающим исполнением команд, должны быть приостановлены, предыдущая работа (работа на основе неправильного результата) должна быть отменена и предыдущие обработки должны быть возобновлены.
Как это часто бывает, упреждающее исполнение команд выполняется исходя из предположения о том, что имеет место операция перехода, которая является идентичной операции перехода в результате предыдущего исполнения, и так, что обработка, которая следует за упреждающим исполнением команд, выполняется посредством определения содержимого исполнения до установления условий. Однако, так как значения пиксела расположены в произвольном порядке, то существует вероятность 50% того, что за результатом предыдущего сравнения следует идентичный результат. Поэтому существует вероятность 50% того, что упреждающее исполнение команд, выполняемое процессором, закончится неудачей. Соответственно, существует вероятность 50% того, что пока работа не возобновлена, при отмене ранее сделанной работы на основе неправильного результата, эта работа должна быть приостановлена на время, которое в 10-20 раз больше времени, необходимого для выполнения четырех основных арифметических операций.
Как описано выше, способ с использованием срединного значения из значений пиксела в идентичных пиксельных позициях по всем n изображениям как значения оценки для обнаружения движущегося объекта является в значительной степени предпочтительным в улучшении точности обнаружения по сравнению со способом с использованием среднего значения. Вместо этого преимущества, для оценки срединного значения по сравнению с оценкой среднего значения процессор должен выполнять огромный объем арифметической обработки.
Настоящее изобретение выполнено с учетом вышеизложенной ситуации. Целью настоящего изобретения является обеспечение способа обнаружения движущегося объекта, посредством которого можно точно обнаруживать движущийся объект или кандидат на него с использованием способа наложения посредством меньшего количества обработок операций, чем требуется при оценке значения оценки для обнаружения движущегося объекта исходя из значений пиксела в идентичных пиксельных позициях по всем захваченным изображениям, причем все эти захваченные изображения совмещают друг с другом одновременно.
РЕШЕНИЕ ПРОБЛЕМЫ
Один аспект настоящего изобретения обеспечивает способ (способ обнаружения движущегося объекта) для обнаружения движущегося объекта, являющегося объектом наблюдения исходя из изображений, захваченных с постоянными интервалами, на основе значения оценки, полученного исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем изображениям при последовательном перемещении этих изображений согласно содержимому, соответствующему оцененному содержимому перемещения движущегося объекта, являющегося объектом наблюдения, в течение упомянутых постоянных интервалов. При этом упомянутый способ включает в себя: этап принятия решения, состоящий из деления изображений на группы, причем каждая из которых включает в себя заданное количество изображений, последовательных во временном ряду, и для каждой группы, принятия решения относительно того, является ли каждый пиксел кандидатом на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, на основе значения оценки, полученного исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всему заданному количеству изображений при последовательном перемещении изображений согласно содержимому, соответствующему оцененному содержимому перемещения, этап проверки, состоящий из проверки того, включает ли в себя каждая группа кандидатов на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, которые совпадают друг с другом с точки зрения оцененного содержимого перемещения и траектории перемещения, и этап обнаружения, состоящий из обнаружения движущегося объекта, являющегося объектом наблюдения, в каждом изображении исходя из упомянутых кандидатов на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, в каждой группе, в отношении которых подтверждено то, что они совпадают друг с другом с точки зрения оцененного содержимого перемещения и траектории перемещения.
Значение оценки может быть оценено с ипользованием робастный статистики исходя из предположения о том, что между значениями пиксела не существует большой разницы, исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всему заданному количеству изображений при последовательном перемещении изображений согласно содержимому, соответствующему оцененному содержимому перемещения. Для каждой группы на этапе принятия решения может быть принято решение о том, что пикселы в идентичных пиксельных позициях по всем изображениям являются кандидатами на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, если значение оценки, полученное с использованием робастной статистики, больше или равно значению критерия.
Способ также может включать в себя: этап вычисления среднего-значения-ограниченных-пикселов, состоящий из вычисления, для каждой группы, среднего значения значений пиксела, которые меньше или равны пороговому значению, для того, чтобы отличать движущийся объект, являющийся объектом наблюдения, от светоизлучающего элемента с более высокой яркостью, чем яркость движущегося объекта, причем эти значения пиксела находятся среди значений пиксела в идентичных пиксельных позициях по всему заданному количеству изображений. При этом для каждой группы, на этапе принятия решения может быть принято решение о том, что пикселы в идентичных пиксельных позициях по всем изображениям являются кандидатами на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, если среднее значение, вычисленное на этапе вычисления среднего-значения-ограниченных-пикселов, больше или равно значению критерия.
Способ также может включать в себя: этап вычисления среднего-значения-всех-пикселов, состоящий из вычисления, для каждой группы, среднего значения всех значений пикселов в идентичных пиксельных позициях по всем изображениям, и этап вычисления порогового значения, состоящий из вычисления, для каждой группы, порогового значения умножением среднего значения, вычисленного на этапе вычисления среднего-значения-всех-пикселов, на заданное число.
Оцененное содержимое перемещения может являться равномерным линейным движением движущегося объекта, являющегося объектом наблюдения, в его оцененном направлении перемещения и с его оцененной величиной перемещения. Движущийся объект как объект наблюдения может быть обнаружен исходя из изображений на основе значения оценки, полученного исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем изображениям при последовательном перемещении изображений посредством параллельного смещения в оцененном направлении перемещения движущегося объекта, являющегося объектом наблюдения, и с его оцененной величиной перемещения.
Оцененное содержимое перемещения может являться равномерно ускоренным движением движущегося объекта, являющегося объектом наблюдения, в его оцененном направлении перемещения и с его оцененной величиной перемещения, которая увеличивается или уменьшается на постоянную величину с течением времени. Движущийся объект, являющийся объектом наблюдения, может быть обнаружен исходя из изображений на основе значения оценки, полученного исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем изображениям при последовательном перемещении изображений посредством параллельного смещения в оцененном направлении перемещения движущегося объекта, являющегося объектом наблюдения, и с его оцененной величиной перемещения.
Движущийся объект, являющийся объектом наблюдения, может являться объектом, движущимся по орбите вокруг земли. Изображения могут являться изображениями, захваченными с интервалами во время наблюдения неподвижной точки.
ПОЛЕЗНЫЙ ЭФФЕКТ ОТ ИЗОБРЕТЕНИЯ
При обнаружении движущегося объекта с использованием способа наложения настоящее изобретение позволяет точно обнаруживать движущийся объект с использованием способа наложения посредством меньшего количества обработок операций, чем требуется при оценке значения оценки для обнаружения движущегося объекта исходя из значений пиксела в идентичных пиксельных позициях по всем захваченным изображениям, причем все эти захваченные изображения совмещают друг с другом одновременно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
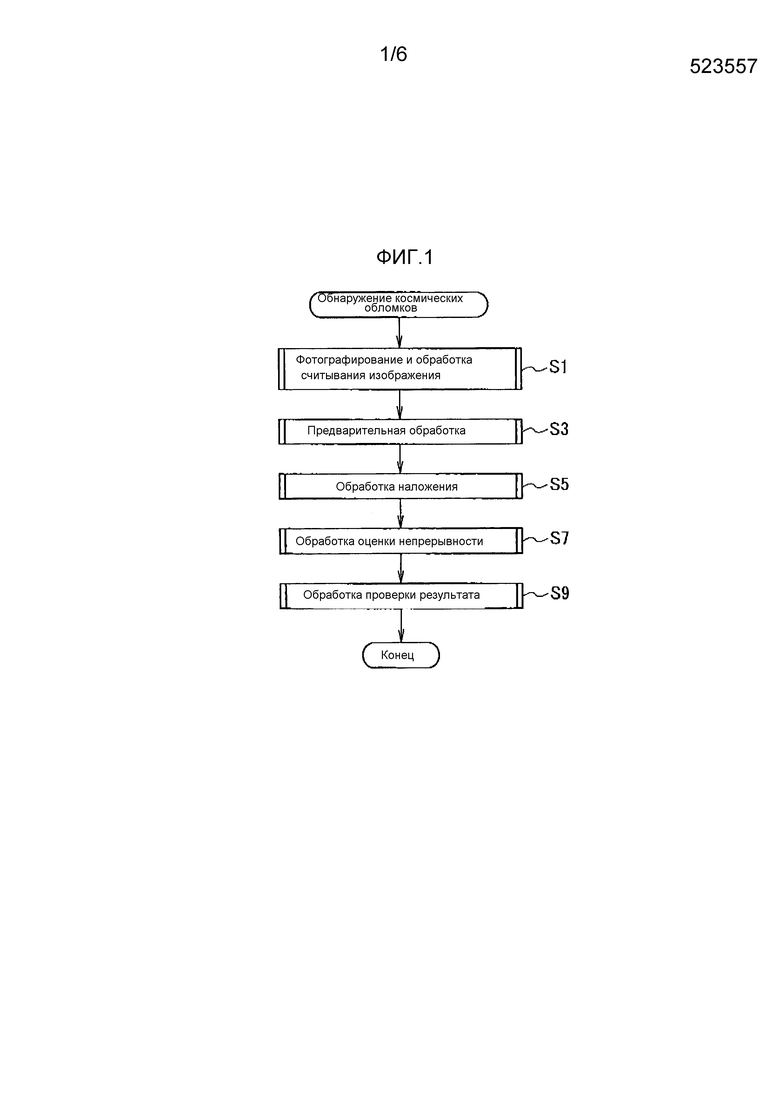
Фиг. 1 - блок-схема, демонстрирующая процедуру в случае, когда способ обнаружения движущегося объекта настоящего изобретения применяется к обнаружению космических обломков исходя из сфотографированных астрономических изображений.
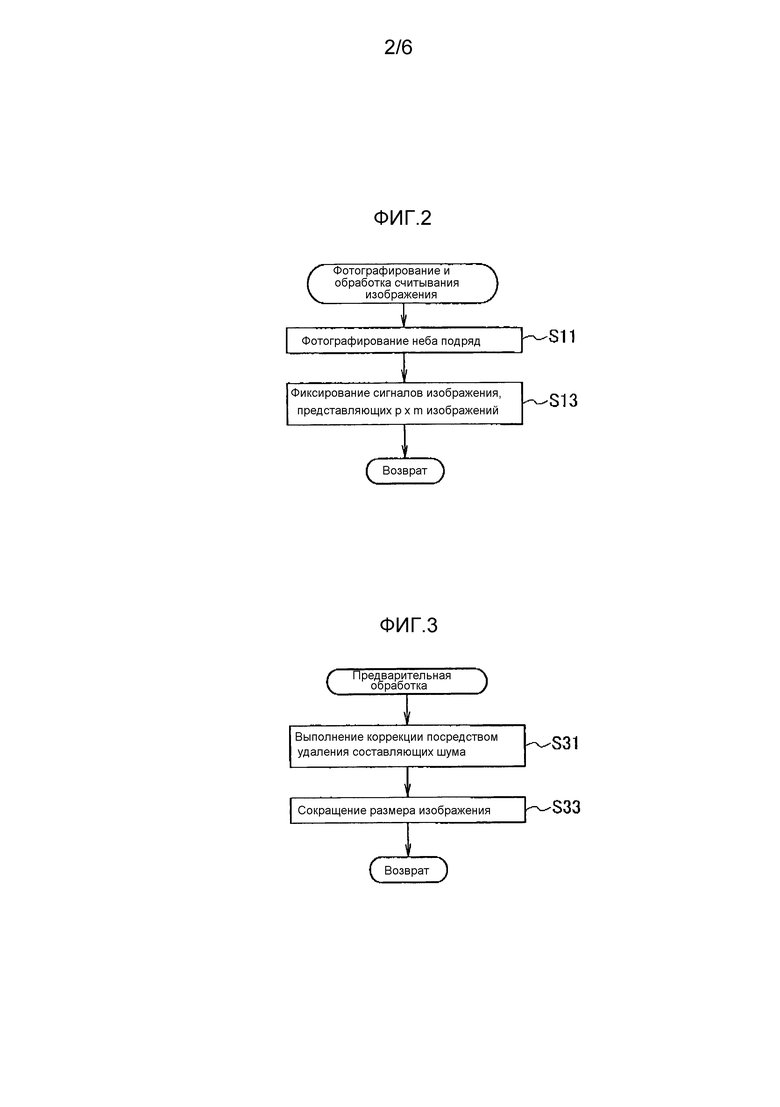
Фиг. 2 - блок-схема, демонстрирующая конкретную процедуру для этапа фотографирования (захвата) и обработки считывания изображения в блок-схеме, изображенной на фиг. 1.
Фиг. 3 - блок-схема, демонстрирующая конкретную процедуру для этапа предварительной обработки в блок-схеме, изображенной на фиг. 1.
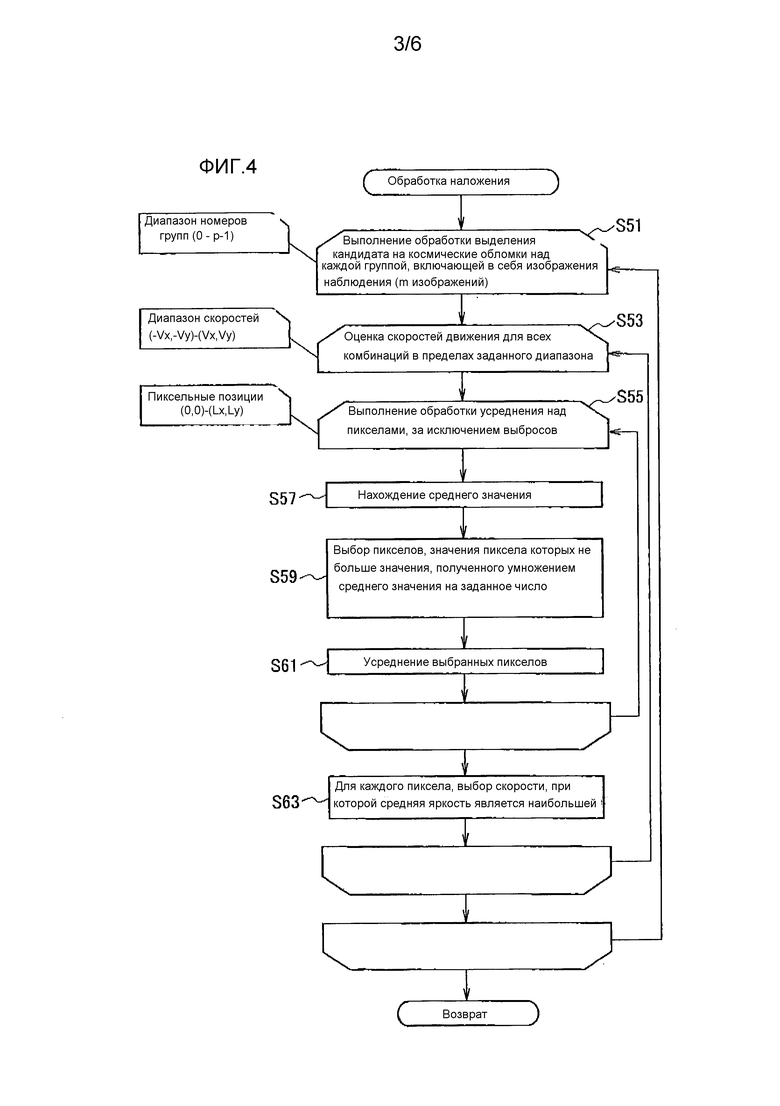
Фиг. 4 - блок-схема, демонстрирующая конкретную процедуру для этапа обработки наложения в блок-схеме, изображенной на фиг. 1.
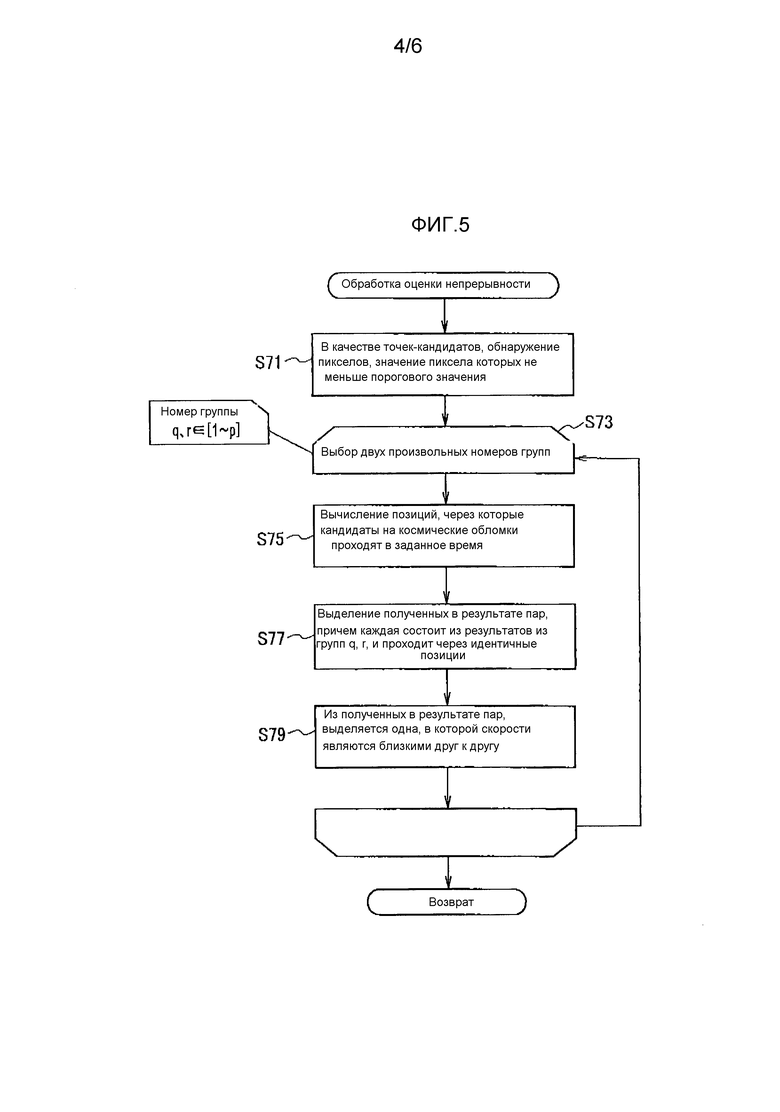
Фиг. 5 - блок-схема, демонстрирующая конкретную процедуру для этапа обработки оценки непрерывности в блок-схеме, изображенной на фиг. 1.
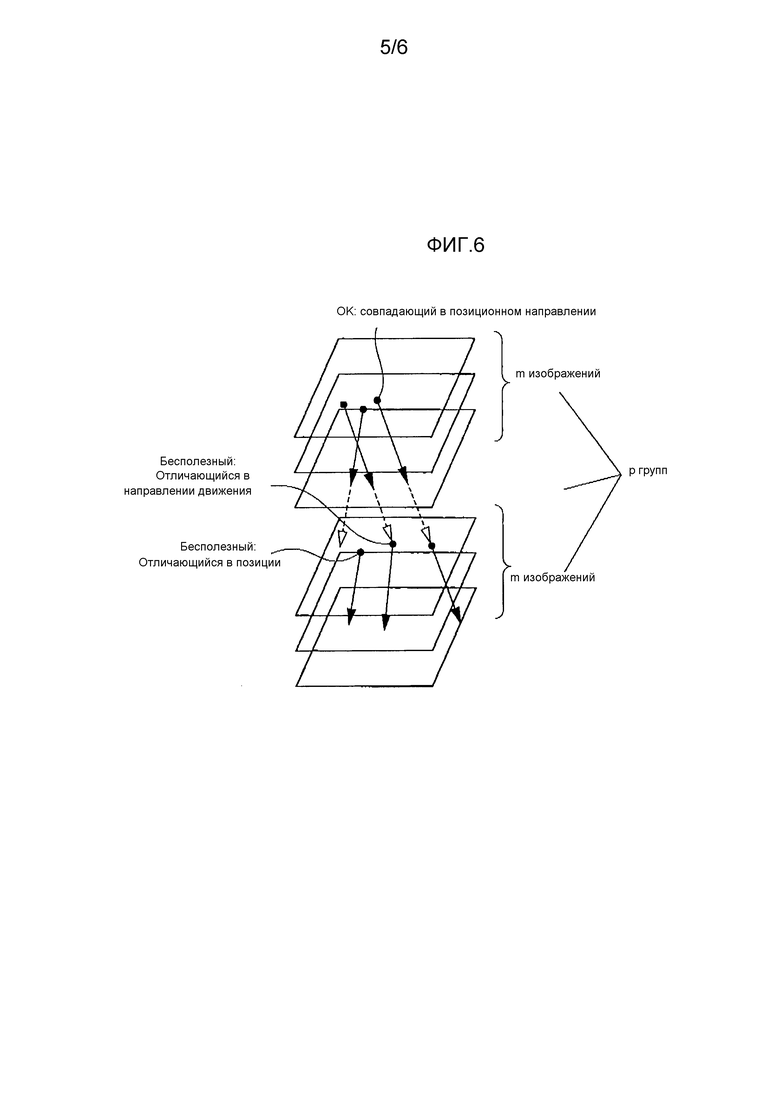
Фиг. 6 - пояснительная схема, изображающая содержимое процедуры для этапа обработки оценки непрерывности, изображенного на фиг. 5.
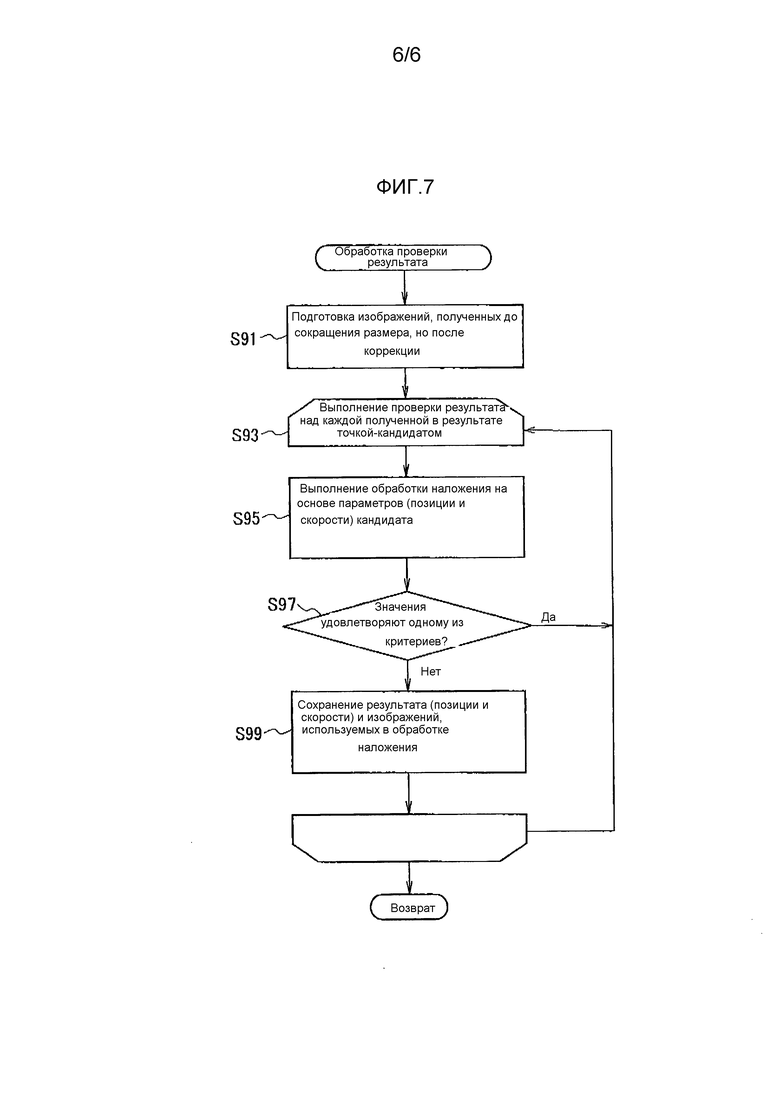
Фиг. 7 - блок-схема, демонстрирующая конкретную процедуру для этапа обработки проверки результата в блок-схеме, изображенной на фиг. 1.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на чертежи описаны варианты осуществления, в которых для обнаружения космических обломков, исходя из сфотографированных астрономических изображений, применяется способ обнаружения движущегося объекта настоящего изобретения.
Способ обнаружения движущегося объекта варианта осуществления разработан для обнаружения космических обломков как движущегося объекта, являющегося объектом наблюдения, исходя из сфотографированных небесных изображений. Этот способ, описанный в блок-схеме фиг. 1, разработан для выполнения этапа фотографирования (захвата) и обработки считывания изображения (этап S1), этапа предварительной обработки (этап S3), этапа обработки наложения (этап S5), этапа обработки оценки непрерывности (этап S7) и этапа обработки проверки результата (этап S9).
Как показано в блок-схеме фиг. 2, этап фотографирования и обработки считывания изображения (этап S1 на фиг. 1) начинается с повторяющегося создания последовательности фотографий космического пространства (неба), включающего в себя геостационарную орбиту космических обломков, в течение заданной продолжительности времени экспозиции с постоянными интервалами времени (этап S11). Впоследствии этап обработки считывания изображения (этап S1 фиг. 1) заканчивается захватом сигналов изображения, представляющих захваченные изображения (этап S13).
Для съемки изображений неба может использоваться устройство (не изображено) для фотографирования (захвата), созданное посредством соединения камеры на ПЗС с астрономическим телескопом, например. Кроме того, в этом варианте осуществления нижеописанный этап обработки наложения (этап S5 на фиг. 1) выполняется p раз, причем каждый раз с использованием m изображений. Другими словами, посредством упомянутого устройства для фотографирования фотографируют подряд p×m изображений и захватывают их.
После этого, как показано в блок-схеме фиг. 3, с коррекции сигналов изображения, введенных из устройства для фотографирования (не изображено), посредством удаления составляющих шума, включенных в эти сигналы изображения (этап S31), начинается этап предварительной обработки (этап S3 на фиг. 1). Впоследствии размер изображений, представляющих скорректированные сигналы изображения, сокращается до размера изображения, которым оперируют в нижеописанном этапе обработки наложения (этап S5 на фиг. 5) (этап S33). В этом варианте осуществления размер изображений сокращается наполовину как в вертикальном, так и в горизонтальном направлениях (до четверти всей области). После этого одному пикселу после сокращения в качестве значения пиксела присваивается наибольшее значение пиксела в 2×2 пикселах до сокращения. Следовательно, этап предварительной обработки (этап S3 на фиг. 1) завершается.
На этапе S31, с удалением составляющих шума выполняется коррекция. В частности, коррекция осуществляется посредством удаления составляющих шума, включенных в сигналы, представляющие изображения, захваченные устройством для фотографирования (не изображено). Типичным примером составляющих шума, которые должны быть удалены, является составляющая смещения элемента с зарядовой связью в камере на ПЗС в устройстве для фотографирования.
Составляющая смещения элемента с зарядовой связью является составляющей шума, которая имеет место тогда, когда изображение фотографического объекта, захваченного астрономическим телескопом устройства для фотографирования (не изображено), преобразуется в электрический сигнал элементом с зарядовой связью в камере на ПЗС. Более конкретно, когда выходные данные должны соответствовать нулевой яркости (то есть когда световая энергия от фотографического объекта находится на нуле), элемент с зарядовой связью может, в некоторых случаях, сдвигать (смещать) фактические выходные данные от нулевой точки. Кроме того, содержимое смещения меняется от одного элемента с зарядовой связью к другому.
В качестве меры противодействия этому, когда фотографируют объект с нулевой яркостью, составляющую смещения элемента с зарядовой связью корректируют (то есть подвергают коррекции смещением), чтобы сигнал изображения, выводимый из устройства для фотографирования, стал равен "0". Между прочим, коррекцию смещением в этом случае называют темновой коррекцией. Значение коррекции может быть получено посредством оценки значения выходных данных из элемента с зарядовой связью во время фотографирования при загораживании светоприемного блока от света.
Впоследствии, для обнаружения движущегося объекта, оцененное таким способом значение коррекции вычитается из значения пиксела в каждом из пикселов, которые соответствуют изображению неба, сфотографированного устройством для фотографирования. Это позволяет корректировать составляющую смещения элемента с зарядовой связью.
Другим типичным примером составляющих шума, которые должны быть удалены из сигналов изображения на этапе S31, является составляющая шума, приписываемая звезде. Составляющая шума, приписываемая звезде, имеет место тогда, когда звезда, существующая в небе, захватывается в изображениях, причем эта звезда и окружающая ее область выражены как размытые точки или линии согласно скорости движения этой звезды.
Составляющая шума, приписываемая звезде, может быть исключена из каждого изображения посредством вычитания значений пиксела в идентичных пиксельных позициях в двух изображениях, которые перекрывают друг друга при параллельном смещении с уже известной величиной перемещения звезды в уже известном направлении перемещения звезды. При этом одно из этих двух изображений является изображением, захваченным устройством для фотографирования (не изображено), а другое изображение является предшествующем ему или следующим за ним изображением, захваченным подряд упомянутым устройством для фотографирования.
Для этого составляющая шума сигналов изображения, приписываемых звезде, исключается после темновой коррекции составляющей смещения элемента с зарядовой связью посредством: совмещения каждых двух последовательных изображений неба, захваченных устройством для фотографирования, для обнаружения движущегося объекта при перемещении этих двух последовательных изображений посредством параллельного смещения согласно направлению и величине перемещения звезды и вычитания значений пиксела в пикселах, перекрывающих друг друга. Вышеизложенное может быть применено как содержимое коррекции, которая должна быть выполнена посредством удаления составляющих шума на этапе S31 фиг. 3.
После этого, как демонстрируется в блок-схеме фиг. 4, начинается этап обработки наложения (этап S5 на фиг. 1) посредством: деления p×m изображений (размер изображения которых равен L=(Lx, Ly)), сфотографированных подряд устройством для фотографирования (не изображено) с постоянными интервалами времени, на p групп (наборов), причем каждая включает в себя m последовательных изображений, и для каждой группы (p=0, …, p-1), подвержения m изображений способу наложения, и посредством него выделения кандидата на космические обломки (этап S51).
Обработка выделения кандидата на космические обломки из m изображений осуществляется посредством выполнения вычисления с использованием значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга, при, посредством параллельного смещения, последовательном перемещении каждого изображения на его оцененную скорость движения космических обломков (то есть длину (расстояние или интервал) перемещения космических обломков на изображении при его оцененной скорости движения в пределах предопределенного временного промежутка). Впоследствии с изменением оцененной скорости движения космических обломков в диапазоне от (-Vx/p, -Vy/p) до {Vx/p, Vy/p) это вычисление выполняется для каждой оцененной скорости движения (этап S53). В этом отношении причиной того, почему диапазоном оцененной скорости движения является 1/p, является то, что упомянутый временной промежуток равен 1/p и расстояние перемещения в пределах всего временного промежутка также равно 1/p.
Кроме того, вычисление с использованием значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем m изображениям, выполняется для каждой из позиций пиксела (координаты пиксела которой находятся в пределах от (0, 0) до (Lx, Ly)) каждого изображения. Более конкретно, обработка усреднения выполняется на значениях пиксела пикселов, за исключением значений пиксела пикселов (выбросов), не удовлетворяющих некоторому условию, в идентичных пиксельных позициях, перекрывающих друг друга по всем m изображениям, которые последовательно перемещают посредством параллельного смещения на оцененную скорость V движения космических обломков (этап S55). В этом отношении упомянутое условие означает "являющийся меньше, чем пороговое значение, полученное умножением среднего значения значений пиксела упомянутых пикселов на заданное число".
Пороговое значение используется для того, чтобы отличать космические обломки от объекта, который излучает свет с более высокой яркостью, чем космические обломки (соответствующего светоизлучающему элементу высокой яркости в формуле изобретения). То, в какое значение должно быть установлено пороговое значение, является очень важным параметром для значения, вычисляемого посредством нижеследующей обработки, для отражения меньшей величины яркости (значения пиксела) движущегося объекта, яркость (значение пиксела) которого существенно расходится с яркостью космических обломков.
Поэтому пороговое значение устанавливается на основе среднего значения всех значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям (посредством умножения среднего значения всех значений пиксела на заданное число). Применение порогового значения в качестве критерия для яркости (значение пиксела) космических обломков позволяет точно отличать пиксел, яркость (значение пиксела) которого существенно расходится с яркостью (значение пиксела) критерия, как пиксел, представляющий существование светоизлучающего объекта, который не является космическими обломками, от пиксела, представляющего существование космических обломков.
При этом вышеупомянутое "заданное число", которое мажорирует пороговое значение, с использованием некоторого статистического метода может быть установлено в надлежащее значение. Упомянутое заданное значение может быть установлено, например, в диапазоне от 1,5 до 3. Нижеследующее описание относится к варианту осуществления, в котором заданное число установлено в 2.
Прежде всего, m изображений, относящихся к одной группе (p=0, …, p-1), установленной на этапе S51, последовательно перемещают посредством параллельного смещения на оцененную скорость движения (одну из (-Vx/p, -Vy/p) - (Vx/p, Vy/p)) космических обломков, установленную на этапе S53. Впоследствии оценивается среднее значение значений пиксела в идентичных пиксельных позициях ((0, 0)-(Lx, Ly)) объекта, перекрывающих друг друга по всем совмещенным изображениям, установленных на этапе S55 (этап S57).
После этого, с использованием порогового значения, полученного умножением упомянутого оцененного среднего значения на два (заданное число), выбираются пикселы, значения пиксела которых меньше или равны упомянутому пороговому значению (этап S59). Вычисляется среднее значение значений пиксела выбранных пикселов (этап S61). Следует отметить то, что принимается решение о невозможности вычисления среднего значения на этапе S61, если отношение пикселов, значения пиксела которых меньше или равны половине среднего значения, оцененного на этапе S57, ко всем пикселам превышает 50%.
После этого вычисление с использованием значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем совмещенным m изображениям, выполняется для каждой из позиций пиксела (координаты пиксела которой находятся в пределах от (0, 0) до (Lx, Ly)) (этап S55 - этап S61). После этого, каждый раз, когда оцененная скорость V движения космических обломков, используемая для последовательного перемещения m изображений посредством параллельного смещения, изменяется с одной на другую в диапазоне от (-Vx/p, -Vy/p) до (Vx/p, Vy/p) (этап S53), выбирается (или обновляется) оцененная скорость V движения, при которой среднее значение, оцененное на этапе S61, является наибольшим (этап S63).
Кроме того, после выбора (или обновления) оцененной скорости V движения, при которой среднее значение, оцененное на этапе S61, является наибольшим, на основе средних значений, которые оценены на этапе S61, для всех оцененных скоростей V (V=(-Vx/p, -Vy/p)-(Vx/p, Vy/p)) движения (этап S53-S63), (вышеприведенные) обработки исполняются для всех оставшихся групп (p=0, …, p-1).
После выполнения вышеизложенных обработок для всех групп (p=0, …, p-1) (этапы S51-S63) этап обработки наложения (этап S5 на фиг. 1) завершается.
Следует отметить то, что на этапах S55-S61 срединное значение или среднее значение значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем m изображениям, может быть оценено как значение оценки для обнаружения космических обломков вместо того, чтобы оценивать значение оценки на основе усредненного значения значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем m изображениям.
Далее, как демонстрируется в блок-схеме фиг. 5, этап обработки оценки непрерывности (этап 57 на фиг. 1) начинается с обнаружения пикселов, значения пиксела которых больше или равны пороговому значению (значению критерия для кандидата, соответствующему значению критерия в формуле изобретения), требуемому для определения кандидата на космические обломки как точек-кандидатов на космические обломки (этап S71). Следует отметить то, что эти пикселы также представляют пикселы, с которыми среднее значение их значений пиксела, оцененное на этапе S61, на основе оцененной скорости V движения, выбранной на этапе S63, становится наибольшим.
Впоследствии из p групп выбираются две произвольные группы (q, r ∈ [1, p]) (этап S73). Для каждой группы q, r, выполняется вычисление в отношении того, через какой пиксел в каждом изображении кандидат на космические обломки, обнаруженный на этапе S71, проходит в обычное заданное время (этап S75).
После этого выделяются пары, причем каждая состоит из кандидата на космические обломки из группы q и кандидата на космические обломки из группы r, которые проходят через идентичные пиксельные позиции (или, в качестве альтернативы, смежные пиксельные позиции в пределах заданных диапазонов) в заданное время (этап S77). Например, схематическое представление на фиг. 6 демонстрирует то, что из трех точек-кандидатов на космические обломки, захваченных в самом верхнем изображении в нижней группе в схеме, два расположены на продолжении линий из траекторий перемещения двух из трех точек-кандидатов на космические обломки, захваченных в каждом изображении в верхней группе в схеме. Поэтому эти две точки-кандидаты соответствуют паре, проходящей через идентичные пиксельные позиции в заданное время.
Впоследствии из пар кандидатов на космические обломки, выделенных на этапе S77 (см. фиг. 5), выделяется пара кандидатов на космические обломки, оцененные скорости V движения которых в соответствующих группах q, r являются близкими друг к другу (то есть находятся в пределах заданного диапазона ошибок), в качестве окончательных кандидатов на космические обломки (этап S79). Например, схематическое представление на фиг. 6 демонстрирует то, что точки-кандидаты на космические обломки, помеченные "OK: совпадающий в позиционном направлении", находятся в идентичном позиционном направлении как в верхней, так и в нижней группах в схеме. Поэтому эта пара соответствует паре, совместно использующей идентичную оцененную скорость V движения, включающую в себя направленные составляющие.
С другой стороны, точки-кандидаты на космические обломки, помеченные "Бесполезный: отличающийся в направлении движения", отличаются друг от друга в направлении движения между верхней и нижней группами в схеме. Поэтому эта пара не соответствует паре, совместно использующей идентичную оцененную скорость V движения, включающую в себя направленные составляющие.
Кроме того, точки-кандидаты на космические обломки, помеченные "Бесполезный: отличающийся в позиции", находятся в идентичном направлении движения как в верхней, так и в нижней группах в схеме. Однако точка-кандидат на космические обломки, захваченная в самом верхнем изображении в нижней группе в схеме, не расположена на продолжении линии из траектории движения точки-кандидата на космические обломки, захваченной в изображениях в верхней группе в схеме. Поэтому эта пара не соответствует паре, проходящей через идентичную пиксельную позицию в заданное время.
Кроме того, на этапе S79 вычисляются оцененные яркости c кандидатов на космические обломки из групп q, r, выделенных на этапе S77. В отношении пары кандидатов на космические обломки, выделенной на этапе S79 в качестве окончательных кандидатов на космические обломки вычисляются оцененные яркости с соответствующих кандидатов на космические обломки из групп q, r с использованием уравнения с=√(a×b), где a и b обозначают максимальные средние значения пикселов (выбранные на этапе S63 фиг. 4), относящиеся к упомянутым точкам-кандидатам, соответственно. В отношении других пар кандидатов на космические обломки в группах q, r, которые не выделены в качестве окончательных кандидатов на космические обломки, их оцененные яркости с устанавливаются в c=0.
После выделения окончательных кандидатов на космические обломки из соответствующих групп q, r и вычисления их яркостей с (этап S73-этап S79) выделяются окончательные кандидаты на космические обломки из другой пары групп и вычисляются их яркости с. В этом отношении, например, если количество групп p равно трем, то окончательные кандидаты на космические обломки выделяются из Групп 1, 2 и из Групп 2, 3, и вычисляются их яркости с. При этом окончательные кандидаты на космические обломки могут также быть выделены из Групп 1, 3, и их яркости с также могут быть вычислены. Этап обработки оценки непрерывности (этап 7 на фиг. 1), следовательно, завершается.
После этого, как демонстрируется в блок-схеме на фиг. 7, на этапе обработки проверки результата (этап S9 на фиг. 1), для всех пар, выделенных на этапе S77 в качестве окончательных кандидатов на космические обломки, из каждой из групп, к которым относятся эти пары, сначала подготавливаются m изображений до сокращения размера на этапе S33 фиг. 3, но после коррекции на этапе S31 фиг. 3 (этап S91). Впоследствии, с использованием подготовленных таким образом изображений, каждый окончательный кандидат проверяется на предмет того, должен ли он быть обнаружен как космические обломки (этап S93).
Для этой обработки проверки, с использованием изображений до сокращения размера, которые подготовлены на этапе S91, на окончательном кандидате на космические обломки выполняется обработка наложения, которая должна выполняться на этапе обработки наложения, на этапе S5 фиг. (1) (этап S95). В этой обработке значение пиксела кандидата на космические обломки из каждой из групп, соответствующего окончательной паре кандидатов на космические обломки, устанавливается в оцененную яркость с, вычисленную на этапе S79 фиг. 5.
После этого принимается решение относительно того, удовлетворяется ли какой-либо из нижеследующих критериев: критерий, состоящий в том, что среднее значение пиксела в точке-кандидате на космические обломки, полученное в результате обработки наложения, меньше или равно пороговому значению (значение критерия для кандидата, соответствующее значению критерия в формуле изобретения), требуемому для выбора точки-кандидата в качестве кандидата на космические обломки, которое используется в обработке этапа S71 на фиг. 5, критерий, состоящий в том, что значения пиксела большинства смежных пикселов меньше или равны среднему значению пиксела, и критерий, состоящий в том, что значения пиксела большинства смежных пикселов меньше 70% порогового значения. Если удовлетворяется один из упомянутых критериев (если ДА на этапе S97), то обработка возвращается к этапу S93.
С другой стороны, если ни один из критериев не удовлетворяется, то есть, если среднее значение пиксела в точке-кандидате на космические обломки больше порогового значения (значения критерия для кандидата, соответствующего значению критерия в формуле изобретения), требуемого для выбора точки-кандидата в качестве кандидата на космические обломки, и если большинство смежных пикселов выходит за пределы вышеупомянутых критериев (если НЕТ на этапе S97), то то, что захватывается в точке-кандидате, обнаруживается как часть космических обломков, представленных пикселом в точке-кандидате и его смежными пикселами, имеющими сходные значения пиксела и которая принимает круглую или эллиптическую форму в целом. После этого результат обнаружения сохраняется вместе с изображениями, используемыми в обработке наложения на этапе S95 (этап S99).
В этом варианте осуществления описано то, что в качестве критерия для принятия решения относительно космических обломков используются как светимость (яркость) в точке-кандидате, так и светимость (яркость) смежных с ней пикселов. Следует отметить, однако, то, что относительно космических обломков решение может быть принято на основе одной светимости (яркости) из двух.
После выполнения обработок от этапа S93 до этапа S99 для всех окончательных кандидатов на космические обломки этап обработки проверки результата (этап S9 на фиг. 1) завершается.
Как очевидно из вышеизложенного описания, обработка на этапе S71 на фиг. 5, относящаяся к этому варианту осуществления, соответствует этапу принятия решения формулы изобретения. Кроме того, обработки от этапа S7 до этапа S9 в блок-схеме фиг. 1, относящиеся к этому варианту осуществления, соответствуют этапу обнаружения в формуле изобретения. Кроме того, обработка на этапе S61 в блок-схеме фиг. 4, относящаяся к этому варианту осуществления, соответствует этапу вычисления среднего-значения-ограниченных-пикселов в формуле изобретения.
Кроме того, обработка на этапе S57 на фиг. 4, относящаяся к этому варианту осуществления, соответствует этапу вычисления среднего-значения-всех-пикселов в формуле изобретения. Кроме того, обработка на этапе S59 на фиг. 4, относящийся к этому варианту осуществления, соответствует этапу вычисления порогового значения в формуле изобретения.
В способе обнаружения космических обломков, выполняемом посредством вышеупомянутых процедур, захваченные изображения делятся на p групп, каждая из которых включает в себя m последовательных изображений, и для каждой группы, с использованием способа наложения на этапе S5 на фиг. 1, на m изображениях выполняется этап обработки наложения. После этого для каждой группы, с использованием совпадения или близости в направлении перемещения или скорости движения как критерия, на этапе обработки оценки непрерывности на фиг. 5 принимается решение относительно того, могут ли кандидаты на космические обломки, выделенные на этапе обработки наложения на фиг. 5, быть выбраны как окончательные кандидаты на космические обломки.
В этом отношении предположим что оцененная скорость V движения космических обломков (расстояние, которое космические обломки проходят за период времени, соответствующий перекрытиям) задается V=(±Vx, ±Vy), размер L изображения задается L=(Lx, Ly), оцененная скорость V и размер L изображения задаются Vx=Vy=200 (то есть V=(±200, ±200)) и Lx=Ly=2000, соответственно, количество изображений, которое должно быть использовано для обнаружения, задается n=32, и количество групп, на которые делятся изображения, задается p=2.
Прежде всего, предположим случай, в котором в качестве значения оценки для обнаружения космических обломков, оценивается среднее значение значений пиксела, которые меньше или равны порогу, который выбирается на этапе S59 на фиг. 4, как на этапе S61 на фиг. 4.
Когда расстояние, которое космические обломки проходят за период времени, соответствующий перекрытиям, вычисляется посредством изменения и попиксельного совмещения пикселов, для движущегося объекта могут быть оценены скорости V движения (±Vx)×(±Vy). В результате при оценке среднего значения значений пиксела соответствующих пикселов (Lx×Ly) для всех оцененных скоростей движения, на каждом изображении дважды (один раз для позиционной составляющей и один раз для составляющей скорости) должно быть выполнено заданное ниже количество обработок операций:
(2Vx)×(2Vy)×(Lx)×(Ly)
=400×400×2000×2000=6,4×10^11.
В связи с этим упомянутое множество обработок операций выполняется на упомянутых 32 изображениях дважды. Другими словами, заданное выше количество обработок операций умножается на 64. В результате, необходимое количество обработок операций составляет приблизительно 4,1×10^13.
Напротив, когда обработки операций делятся на половины для выполнения на соответствующих двух группах, оцененное количество скоростей V движения движущегося объекта (расстояние, которое движущийся объект проходит за период времени, соответствующий перекрытиям) сокращается до половины количества скоростей V движения движущегося объекта, которое оценивается, когда обработки операций не делятся на половины. В результате, могут быть оценены скорости V движения (±Vx/2)×(±Vy/2). Соответственно, для каждой скорости V движения, для оценки среднего значения значений пиксела пикселов (Lx, Ly) требуется заданное ниже количество обработок операций, которое должно быть выполнено на каждом изображении дважды (один раз для позиционной составляющей и один раз для составляющей скорости):
(2Vx/2)×(2Vy/2)×(Lx)×(Ly)
=200×200×2000×2000=1,6×10^11.
В связи с этим упомянутое множество обработок операций выполняется на упомянутых 32 изображениях дважды. Другими словами, заданное выше количество обработок операций умножается на 64. В результате, необходимое количество обработок операций приблизительно равно
1,0×10^13
(что равно четверти количества обработок операций, которое необходимо, когда обработки операций не делятся на половины, которые должны выполняться на соответствующих двух группах).
Далее, предположим случай, когда в качестве значения оценки для обнаружения космических обломков оценивается срединное значение значений пиксела в идентичных пиксельных позициях по всем совмещенным 32 изображениям.
Так как обработка оценки срединного значения значений пиксела соответствующих пикселов по всем n изображениям является обработкой операций, которая должна выполняться для сортировки n значений пиксела, то для этой обработки требуется
nlog(n)
обработок сравнения и операций присваивания. При замене n на 32 в этом выражении, получаем
32log32.
Это означает то, что выполняется приблизительно
1,0×10^14
обработок операций.
Когда n изображений делятся на p групп и над каждой группой выполняется приблизительно 1,0×10^14 обработок операций, для каждой группы оценивается срединное значение значений пиксела n/p изображений. Поэтому выполняется следующее количество обработок сравнения и операций присваивания:
p×(n/p)log(n/p)=nlog(n/p).
Если в этом выражении n и p соответственно заменить на 32 и 2, то получается
32logl6.
Это означает то, что необходимое количество обработок операций приблизительно равно 2,0×10^13
(что равно одной пятой от количества обработок операций, которое необходимо, когда обработки операций не делятся на половины, которые должны выполняться на соответствующих двух группах).
Как описано выше, с использованием упомянутого способа наложения над каждой группой выполняется обнаружение точек-кандидатов на космические обломки. Для каждой группы, решение относительно того, представляет ли каждая из точек-кандидатов космические обломки, принимается на основе совпадения в величине перемещения и траектории перемещения между этими точками-кандидатами. Если космические обломки обнаруживают с использованием упомянутого способа наложения, то это позволяет точно обнаруживать кандидатов на пикселы, захватывающие космические обломки, и, следовательно, сами космические обломки, посредством меньшего количества обработок операций, чем требуется при оценке значения оценки для обнаружения космических обломков исходя из значений пиксела идентичных пиксельных позиций по всем захваченным изображениям, причем все эти захваченные изображения совмещают друг с другом одновременно.
Кроме того, когда, как в этом варианте осуществления, захваченные изображения делятся на группы и над каждой группой выполняется этап обработки наложения, решение относительно того, являются ли кандидаты на космические обломки, обнаруженные из каждой группы, непрерывными по отношению друг к другу с точки зрения направления перемещения, скорости движения и позиции перемещения, может быть добавлено к решению относительно того, представляют ли кандидаты на космические обломки космические обломки. Посредством этого космические обломки могут быть точно обнаружены даже несмотря на то, что в качестве значения оценки для обнаружения космических обломков используется среднее значение пиксела, требующее меньшего количества обработок операций.
Кроме того, когда в качестве значения оценки для обнаружения космических обломков вместо срединного значения применяется среднее значение или значение оценки на основе среднего значения, существует вероятность приблизительно 2% того, что процессор потерпит неудачу в упреждающем исполнении команд из-за звезды и т.п., захваченной в изображениях. Это происходит потому, что когда процессор выполняет упреждающее исполнение команд в обработках операций для оценки среднего значения, существует вероятность приблизительно 2% того, что в захваченных изображениях существует движущийся объект, например звезда, отличающийся от космических обломков. Эта вероятность неудачи намного ниже, чем вероятность 50% того, что упреждающее исполнение команд закончится неудачей, при оценке срединного значения посредством nlog(n/p) обработок сравнения и операций присваивания. Поэтому вероятность ненужных обработок операций из-за неудачи в упреждающем исполнении команд намного меньше, чем при вычислении срединного значения. Поэтому нагрузка по обработкам операций также может быть сокращена.
Кроме того, в способе обнаружения космических обломков этого варианта осуществления используется пороговое значение, полученное умножением среднего значения значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям на заданное число (например, два) для того, чтобы отличать космические обломки от объекта, который излучает свет более высокой яркости, чем космические обломки (соответствующего светоизлучающему элементу высокой яркости в формуле изобретения).
Поэтому упомянутое среднее значение пиксела отражает меньшую величину яркости (значение пиксела) светоизлучающего элемента высокой яркости (составляющая шума), например звезды или космического луча в космическом пространстве, захваченного в пикселах, чем среднее значение, оцененное посредством просто усреднения значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям. Другими словами, среднее значение, оцененное посредством усреднения только значений пиксела, которые меньше или равны пороговому значению, полученному умножением среднего значения значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям на заданное число (например, два), находится ближе к яркости (значению пиксела) космических обломков, чем среднее значение пиксела, полученное посредством просто усреднения значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям.
Соответственно, при обнаружении космических обломков с использованием способа наложения применение среднего значения значений пиксела, которые меньше или равны пороговому значению, в качестве значения оценки для обнаружения космических обломков позволяет точно обнаруживать кандидата на пиксел, захватывающий космические обломки, и, следовательно, сами космические обломки, посредством меньшего количества обработок операций, чем требуеется при использовании срединного значения, оцененного исходя из значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям, в качестве значения оценки для космических обломков.
Отметим, что целесообразно использовать статистическое значение, например среднее значение значений пиксела идентичных пиксельных позиций по всем совмещенным изображениям, когда, как описано выше, значение оценки для обнаружения космических обломков или точек-кандидатов на космические обломки вычисляется исходя из значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям. Также целесообразно в качестве точек-кандидатов на космические обломки обнаруживать точки, соответствующие значениям пиксела, которые больше или равны пороговому значению (которое оценивается) с использованием срединного значения или способом с использованием робастной статистики с учтом значений выбросов, например методом оценки RANSAC или методом оценки LMedS.
Вышеупомянутое пороговое значение, однако, может быть определено независимо от среднего значения значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям. Кроме того, не обязательно использовать пороговое значение такого типа.
Кроме того, выше описан вариант осуществления, в котором настоящее изобретение осуществлено как способ обнаружения космических обломков. Однако настоящее изобретение может широко применяться для обнаружения движущегося объекта, отличного от космических обломков исходя из изображений, захваченных с постоянными интервалами, с использованием упомянутого способа наложения, например идентификации и обнаружения объекта, отличного от космических обломков, например искусственного спутника, движущегося по орбите вокруг Земли, или окрашенных микроорганизмов на захваченных изображениях.
Кроме того, выше описан вариант осуществления наряду с приведением примера выполнения упомянутого способа наложения над движущимся объектом, объектом наблюдения, при равномерном линейном движении на изображениях в оцененном направлении перемещения и с оцененной величиной перемещения. Однако настоящее изобретение также может быть применено к случаю выполнения способа наложения над движущимся объектом, объектом наблюдения при равномерно ускоренном движении на изображениях с оцененной величиной перемещения, которая увеличивается или уменьшается на постоянную величину с течением времени.
В упомянутом варианте осуществления изображения, захваченные с постоянными интервалами, делятся на группы, причем каждая включает в себя заданное количество изображений, последовательных во временном ряду. Если в каждой группе кандидаты, в отношении которых принимается решение о том, что они представляют движущийся объект, объекты наблюдения в соответствующих изображениях совпадают друг с другом с точки зрения оцененного содержимого перемещения (оцененные параметры движения) и траектории перемещения, то в отношении этих кандидатов принимается решение о том, что они представляют идентичный движущийся объект. Посредством этого, в конечном итоге, движущийся объект, объект наблюдения, распознается и обнаруживается.
В этом обнаружении, когда количество изображений равно n, количество обработок операций для оценки срединного значения изображений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям уменьшается от nlog(n), требуемого, когда срединное значение оценивается при совмещении всех изображений, до (n/p)log(n/p), умноженного на p, количество групп, (=nlog(n/p)) требуемого в зависимости от количества изображений (n/p), включенных в каждую группу. Кроме того, количество обработок операций для принятия решения относительно того, совпадают ли кандидаты на пикселы, захватывающие движущийся объект, объект наблюдения, в соответствующих группах друг с другом с точки зрения оцененного содержимого перемещения и траектории перемещения, не является таким большим, так как эти обработки операций выполняются посредством сравнения между значениями.
В результате, так как значение оценки для движущегося объекта, объекта наблюдения, оценивается с использованием упомянутого способа наложения, который выполняется над каждой из групп, на которые делятся захваченные изображения, то этот движущийся объект может быть точно обнаружен посредством меньшего количества обработок операций, чем требуется, когда значение оценки для обнаружения движущегося объекта оценивается исходя из значений изображения в идентичных пиксельных позициях по всем захваченным изображениям, причем все изображения совмещают друг с другом одновременно.
В упомянутом варианте осуществления среднее значение, вычисляемое на этапе вычисления среднего-значения-ограниченных-пикселов, является средним значением значений пиксела в идентичных пиксельных позициях по всем изображениям, за исключением значения пиксела, соответствующего светоизлучающему элементу высокой яркости, яркость (значение пиксела) которого существенно превышает яркость (значение пиксела) движущегося объекта, объекта наблюдения, на изображениях. Поэтому среднее значение, вычисляемое на этапе вычисления среднего-значения-ограниченных-пикселов, является средним значением пиксела, которое отражает меньшую величину яркости (значение пиксела) светоизлучающего элемента высокой яркости (составляющая шума), например звезды или космического луча в космическом пространстве, захваченного в пикселах, чем среднее значение, оцененное посредством просто усреднения значений пиксела в идентичных пиксельных позициях по всем изображениям. Другими словами, среднее значение пиксела, вычисляемое на этапе вычисления среднего-значения-ограниченных-пикселов, находится ближе к яркости (значению пиксела) движущегося объекта, объекта наблюдения, чем среднее значение пиксела, получаемое посредством просто усреднения значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям.
Кроме того, для вычисления среднего значения пиксела процессор выполняет либо упреждающее исполнение команд по "выполнению операции суммирования для вычисления среднего значения" или упреждающее исполнение команд по "не выполнению операции суммирования для вычисления среднего значения" над значениями пиксела в идентичных пиксельных позициях по всем изображениям. До тех пор, пока процент существования светоизлучающего элемента высокой яркости в каждом изображении не является таким высоким, что многие из пикселов в изображении отображают светоизлучающий элемент высокой яркости, упреждающее исполнение команд, которое должно выполняться процессором, является упреждающим исполнением команд по "выполнению операции суммирования для вычисления среднего значения" с вероятностью, которая адекватно выше 50%, и является успешным с вероятностью, которая адекватно выше 50%. Поэтому влияние увеличения величины обработок операций в результате неудачи в упреждающем исполнении команд является небольшим.
Соответственно, когда движущийся объект обнаруживают с использованием упомянутого способа наложения, применение среднего значения пиксела, вычисляемого на этапе вычисления среднего-значения-ограниченных-пикселов, в качестве значения оценки для обнаружения движущегося объекта позволяет точно определять пиксел, захватывающий движущийся объект, объект наблюдения или кандидата на него посредством меньшего количества обработок операций, чем требуется, когда в качестве значения оценки для движущегося объекта используют срединное значение, оцененное исходя из значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям.
То, в какое значение должно быть установлено пороговое значение, которое используется для того, чтобы отличать движущийся объект, объект наблюдения, от светоизлучающего элемента высокой яркости, является очень важным параметром для среднего значения, вычисляемого на этапе вычисления среднего-значения-ограниченных-пикселов, для отражения меньшей величины яркости (значения пиксела) светоизлучающего элемента высокой яркости, яркость (значение пиксела) которого существенно расходится с яркостью движущегося объекта, объекта наблюдения.
Поэтому пороговое значение устанавливается на основе среднего значения всех значений пиксела в идентичных пиксельных позициях по всем совмещенным изображениям (посредством умножения среднего значения всех значений пиксела на заданное число). Применение порогового значения в качестве критерия для яркости (значение пиксела) движущегося объекта, объекта наблюдения, позволяет точно отличать пиксел, яркость (значение пиксела) которого существенно расходится с яркостью (значение пиксела) критерия, как пиксел, представляющий существование светоизлучающего элемента высокой яркости, от пиксела, представляющего существование движущегося объекта, объекта наблюдения.
Даже если на изображениях захвачены звезда, космический луч и т.п. с более высокой яркостью, чем объект, движущийся по орбите вокруг Земли, который является движущимся объектом как объектом наблюдения, то упомянутый вариант осуществления, исходя из изображений, позволяет точно обнаруживать объект, движущийся по орбите вокруг Земли, посредством меньшего количества обработок операций.
При обнаружении движущегося объекта с использованием упомянутого способа наложения упомянутый вариант осуществления позволяет точно обнаруживать движущийся объект посредством меньшего количества обработок операций, чем требуется при оценке значения оценки для обнаружения движущегося объекта исходя из значений пиксела в идентичных пиксельных позициях по всем захваченным изображениям, причем все эти захваченные изображения совмещают друг с другом одновременно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2013 |
|
RU2618927C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2013 |
|
RU2597882C1 |
| СПОСОБ ОБНАРУЖЕНИЯ КОСМИЧЕСКИХ ОБЛОМКОВ | 2011 |
|
RU2536349C2 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДВИЖУЩИМСЯ ТЕЛОМ | 2017 |
|
RU2737193C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ТЕЛ И СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ТЕЛ | 2012 |
|
RU2568777C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2571367C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СВЕТОФОРОВ И СПОСОБ ОБНАРУЖЕНИЯ СВЕТОФОРОВ | 2014 |
|
RU2643861C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ, СПОСОБ ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2571368C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ КАПЕЛЬ ВОДЫ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ УСТРОЙСТВА ОБНАРУЖЕНИЯ КАПЕЛЬ ВОДЫ | 2013 |
|
RU2644518C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2649967C2 |
Изобретение относится к области обработки изображений, в частности к способу обнаружения движущегося объекта, например космических обломков, исходя из захваченных изображений. Техническим результатом является повышение точности обнаружения движущихся объектов или кандидатов на него с использованием способа наложения посредством меньшего количества обработок операций. Предложен способ обнаружения движущегося объекта, в котором этап обработки наложения состоит из: деления захваченных изображений на p групп, каждая из которых включает в себя m последовательных изображений, и применения для каждой группы способа наложения к этим m изображениям. Впоследствии для каждой группы в этом способе выделяется кандидат на космические обломки на основе значения оценки для обнаружения космических обломков, которое получают исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем m изображениям, совмещенным друг с другом. После этого в этом способе на основе совпадения или близости с точки зрения направления перемещения и скорости движения принимается решение относительно того, выбирать ли выделенный кандидат на космические обломки в каждой группе в качестве окончательного кандидата на космические обломки. 8 з.п. ф-лы, 7 ил. 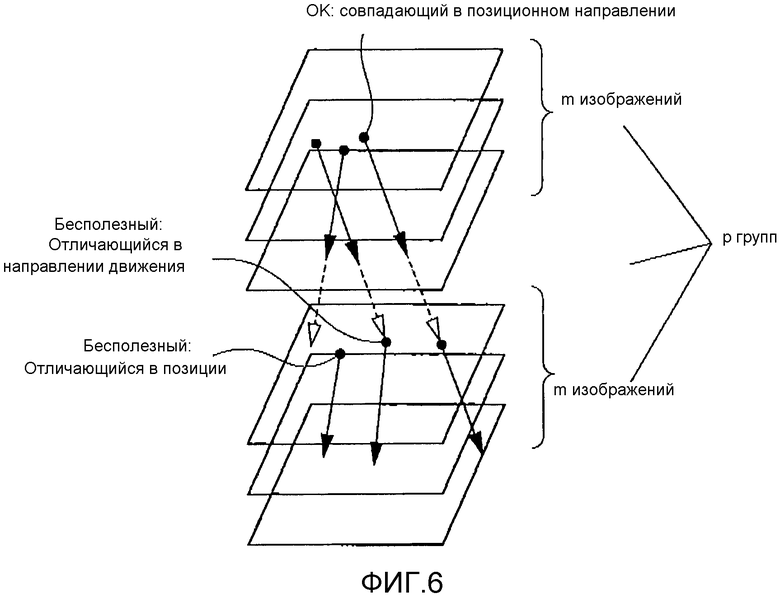
1. Способ обнаружения движущегося объекта, являющегося объектом наблюдения, исходя из изображений, захватываемых с постоянными интервалами времени, на основе значения оценки, полученного исходя из значений пикселов в идентичных пиксельных позициях, перекрывающих друг друга по всем изображениям при последовательном перемещении изображений согласно содержимому, соответствующему оцененному содержимому перемещения движущегося объекта, являющегося объектом наблюдения, в течение постоянных интервалов времени, содержащий:
этап принятия решения, состоящий из деления изображений на группы, каждая из которых включает в себя заданное количество изображений, последовательных во временном ряду, и принятия решения для каждой группы относительно того, является ли каждый пиксел кандидатом на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, на основе значения оценки, полученного исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всему упомянутому заданному количеству изображений при последовательном перемещении изображений согласно содержимому, соответствующему оцененному содержимому перемещения,
этап проверки, состоящий из проверки того, включает ли в себя каждая группа кандидатов на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, которые совпадают друг с другом с точки зрения упомянутого оцененного содержимого перемещения и траектории перемещения, и
этап обнаружения, состоящий из обнаружения движущегося объекта, являющегося объектом наблюдения, в каждом изображении исходя из кандидатов на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, в каждой группе, в отношении которых подтверждено то, что они совпадают друг с другом с точки зрения упомянутого оцененного содержимого перемещения и траектории перемещения.
2. Способ по п. 1, в котором:
значение оценки оценивается с использованием робастной статистики исходя из предположения о том, что между значениями пиксела не существует большой разницы, исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всему заданному количеству изображений при последовательном перемещении изображений согласно содержимому, соответствующему оцененному содержимому перемещения, и
на этапе принятия решения для каждой группы принимается решение о том, что пикселы в идентичных пиксельных позициях по всем изображениям являются кандидатами на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, если значение оценки, полученное с использованием робастной статистики, больше или равно заданному пороговому значению.
3. Способ по п. 1, дополнительно содержащий этап вычисления среднего значения ограниченных пикселов, состоящий из вычисления для каждой группы среднего значения значений пиксела, которые меньше или равны пороговому значению, для того, чтобы отличать движущийся объект, являющийся объектом наблюдения, от светоизлучающего элемента с более высокой яркостью, чем яркость движущегося объекта, причем эти значения пиксела находятся среди значений пиксела в идентичных пиксельных позициях по всему заданному количеству изображений, причем
на этапе принятия решения для каждой группы принимается решение о том, что пикселы в идентичных пиксельных позициях по всем изображениям являются кандидатами на пиксел, захватывающий движущийся объект, являющийся объектом наблюдения, если среднее значение, вычисленное на этапе вычисления среднего значения ограниченных пикселов, больше или равно заданному пороговому значению.
4. Способ по п. 1, дополнительно содержащий:
этап вычисления среднего значения всех пикселов, состоящий из вычисления среднего значения всех значений пиксела в идентичных пиксельных позициях по всем изображениям для каждой группы, и
этап вычисления порогового значения, состоящий из вычисления порогового значения для каждой группы путем умножения среднего значения, вычисленного на этапе вычисления среднего значения всех пикселов, на заданное число.
5. Способ по п. 2, дополнительно содержащий:
этап вычисления среднего значения всех пикселов, состоящий из вычисления среднего значения всех значений пиксела в идентичных пиксельных позициях по всем изображениям для каждой группы, и
этап вычисления порогового значения, состоящий из вычисления порогового значения для каждой группы путем умножения среднего значения, вычисленного на этапе вычисления среднего значения всех пикселов, на заданное число.
6. Способ по п. 3, дополнительно содержащий:
этап вычисления среднего значения всех пикселов, состоящий из вычисления среднего значения всех значений пиксела в идентичных пиксельных позициях по всем изображениям для каждой группы, и
этап вычисления порогового значения, состоящий из вычисления порогового значения для каждой группы путем умножения среднего значения, вычисленного на этапе вычисления среднего значения всех пикселов, на заданное число.
7. Способ по любому из пп. 1-6, в котором:
оцененное содержимое перемещения является равномерным линейным движением движущегося объекта, являющегося объектом наблюдения, в его оцененном направлении перемещения и с его оцененной величиной перемещения, и
движущийся объект, являющийся объектом наблюдения, обнаруживают исходя из изображений на основе значения оценки, полученного исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем изображениям при последовательном перемещении изображений посредством параллельного смещения в оцененном направлении перемещения движущегося объекта, являющегося объектом наблюдения, и с его оцененной величиной перемещения.
8. Способ по любому из пп. 1-6, в котором:
оцененное содержимое перемещения является равномерно ускоренным движением движущегося объекта, являющегося объектом наблюдения, в его оцененном направлении перемещения и с его оцененной величиной перемещения, которая увеличивается или уменьшается на постоянную величину с течением времени, и
движущийся объект, являющийся объектом наблюдения, обнаруживают исходя из изображений на основе значения оценки, полученного исходя из значений пиксела в идентичных пиксельных позициях, перекрывающих друг друга по всем изображениям при последовательном перемещении изображений посредством параллельного смещения в оцененном направлении перемещения движущегося объекта, являющегося объектом наблюдения, и с его оцененной величиной перемещения.
9. Способ по любому из пп. 1-6, в котором:
движущийся объект, являющийся объектом наблюдения, является объектом, движущимся по орбите вокруг земли, и
изображения являются изображениями, захваченными с интервалами времени в течение наблюдения за фиксированной областью, которое осуществляется в отношении одной и той же области.
| WO 2012033159 A1, 2012-03-15 | |||
| US 2003202682 A1, 2003-10-30 | |||
| JP 2002220098 A, 2002-08-06 | |||
| JP 2002310616 A, 2002-10-23 | |||
| US 2012154579 A1, 2012-06-21 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ ПАРАМЕТРОВ | 2010 |
|
RU2446471C1 |

