ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу обнаружения движущегося объекта на основе полученных изображений.
УРОВЕНЬ ТЕХНИКИ
Космические обломки являются выведенными из эксплуатации искусственными объектами, движущимися по орбите вокруг Земли. Обнаружение существования космических обломков важно для спокойного движения космического аппарата (искусственных спутников, космических станций, космических кораблей многоразового использования и т. п.). В одном из традиционных способов обнаружения космических обломков обнаруживают его существование, соответственно извлекая участки с высокой яркостью из изображений, полученных с помощью CCD-камеры (на устройствах с зарядовой связью) на Земле или на орбите.
Этот способ содержит этапы, на которых: вырезают области одного и того же размера из трех или более изображений, полученных во временных интервалах, соответствующих движению движущегося объекта, такого как космические обломки; и применяют к вырезанным областям изображений способ укладки. Здесь движение движущегося объекта является равномерным и т. п. движением, имеющим векторы движения (скорости) в двумерном направлении, например, в системе прямоугольных координат xy. Чтобы быть конкретным, вырезанные области изображений накладываются друг на друга и медианное значение вычисляется из пиксельных значений в одних и тех же пикселях областях наложенных изображений. Если медианное значение, определенное таким образом, равно или больше заданного значения, пиксель извлекается в качестве пикселя, представляющего существование движущегося объекта (смотрите, например, PTL 1 и PTL2).
Способ укладки является широко используемым эффективным способом не только для обнаружения космических обломков, но также для обнаружения движущегося объекта при низком уровне яркости в изображении. Дополнительно, как описано выше, способ укладки использует медианное пиксельное значение в качестве значения оценки для обнаружения движущегося объекта. Поэтому способ укладки не вызывает роста значения оценки, даже если в некоторых изображениях случается попадание шумовой составляющей (например, в некоторые изображения попадает звезда или космический луч), в отличие от другого случая, где в качестве значения для оценки используется среднее пиксельное значение. По этой причине способ укладки является предпочтительным в отношении запрещения ошибочного обнаружения движущегося объекта из-за присутствия звезды или космических лучей, которые по случайности могут попасть в изображение.
ПЕРЕЧЕНЬ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[PTL 1] Опубликованная японская патентная заявка №2002-13931
[PTL 2] Опубликованная японская патентная заявка №2003-323625
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
Как описано выше, когда движущийся объект, используя способ укладки, обнаруживается на основе множества изображений, полученных во временных интервалах, требуется накладывать области, которые должны вырезаться из соответствующих изображений, способом со смещением на величину перемещения движущегося объекта в каждом интервале фотографирования изображения (получения изображения), так чтобы объекты, полученные в изображениях, которые соответствуют объекту обнаружения, накладывались друг на друга. Однако, как это часто бывает в случае космических обломков, например, о движении движущегося объекта заранее ничего не известно (направление вектора и скалярное значение).
По этой причине области, пригодные для вырезания из изображений, которые позволяют накладывать друг на друга со смещением изображения космических обломков в качестве объектов обнаружения, должны оцениваться посредством проб и ошибок, то есть, вырезая возможные области из соответствующих изображений и накладывая возможные области со смещением как в различных направлениях, так и с различной величиной. Такой способ проб и ошибок требует огромного объема работ по обработке данных.
Предположим, например, случай, когда движущийся объект обнаруживается из n изображений, каждое из которых имеет размер изображения L=(Lx, Ly), с помощью вышеупомянутого способа укладки. Здесь предполагается, что компоненты скорости движения V по направлениям осей x и y задаются как V=(±Vx, ±Vy), когда скорость движения V движущегося объекта выражается, используя расстояние, на которое движущийся объект перемещается за период времени, соответствующий наложениям между изображениями движущегося объекта. В этом отношении, дополнительно предположим случай, когда значение скорости V и значение размера L изображения задаются как Vx=Vy=200 (то есть, V=(±200, ±200) и Lx=Ly=2000, соответственно, когда скорость V движения и размер L изображения выражаются, используя определенное количество пикселей; и количество n изображений, которое должно использоваться для обнаружения, равно 32.
Когда расстояние, на которое движущийся объект перемещается за период времени, соответствующий наложениям, вычисляется, изменяя и накладывая пиксели на однозначной основе, для движущегося объекта могут предполагаться скорости V (±Vx)×(±Vy). В результате, при оценке пиксельных значений в соответствующих пикселях (Lx×Ly) для всех воображаемых скоростей количество необходимых операционных процессов составляет
(2Vx)×(2Vy)×(Lx)×(Ly)
=400×400×2000×2000=6,4*1011.
Эти вычислительные процессы необходимы для каждого из n изображений. Соответственно, когда вычисляются все пиксельные значения во всех картинках, общее количество необходимых вычислительных процессов получается умножением упомянутого выше числа на 32, давая в результате приблизительно 2,0×1013.
Дополнительно, процесс вычисления медианного значения из пиксельных значений в одних и тех же положениях пикселей для n изображений обязательно должен содержать: арифметический процесс сортировки n пиксельных значений; и процесс выбора значения, лежащего в средней точке в последовательности пиксельных значений, расположенных в восходящем (или нисходящем) порядке в результате сортировки. По этой причине время, необходимое для вычисления, зависит от времени вычисления, необходимого для сортировки, и равно времени, необходимому для выполнения nlog(n) процессов сравнения и операций назначения. Даже в случае, когда требуется наименьшее количество процессов без сортировки значений как результат процессов сравнения, количество операций, необходимое для процессов сравнения и операций назначения, в log(n) раз больше, чем число (n) операций, которое должно быть выполнено, чтобы оценить среднеарифметическое пиксельное значение. В обычных случаях значения, полученные в результате операции сравнения, необходимо сортировать и, дополнительно, каждый раз при сортировке значений требуются три операции назначения. По этой причине, количество операций, необходимое для такой обработки, оказывается в несколько раз большим. Это делает обработку тяжелой задачей, требующей больших затрат времени.
Дополнительно, при операции сравнения для сортировки n пиксельных значений процессор после процесса сравнения выполняет исполнение по предположению. То есть, после сравнения пары пиксельных значений, выбранных из n пиксельных значений, процессор выполняет исполнение по предположению "изменения порядка двух пиксельных значений" в зависимости от результата сравнения или исполнение по предположению "неизменности порядка двух пиксельных значений".
В этом отношении, предположим случай, когда для пары пиксельных значений процессор выполняет исполнение по предположению "изменения порядка двух пиксельных значений." Если пиксельные значения, как объект исполнения по предположению, появившиеся так, что они выстроены в восходящем или нисходящем порядке, изменяют свой порядок на обратный, для чего процессор сортирует два пиксельных значения, исполнение по предположению, выполняемое процессором, является успешным.
Однако, если сначала пиксельные значения, как объект исполнения по предположению, выстраиваются в порядке, в котором пиксельные значения должны сортироваться, исполнение по предположению, выполняемое процессором, является ошибкой, поскольку процессы, следующие за исполнением по предположению, должны приостанавливаться; предшествующая работа (работа, основанная на неправильном результате) должна быть аннулирована; и предшествующая работа должна быть выполнена снова.
Как частый случай, исполнение по предположению выполняется при предположении, что будет иметь место ветвь, которая является той же самой, что и результат предшествующего исполнения, и, в известном смысле, что процесс, следующий за исполнением по предположению, выполняется путем определения содержания исполнения перед тем, как будут урегулированы условия. Однако, поскольку пиксельные значения выстраиваются в случайном порядке, существует 50-типроцентная вероятность, что результат предшествующего сравнения сопровождается тем же самым результатом. По этой причине существует 50-типроцентная вероятность, что исполнение по предположению, выполняемое процессором, заканчивается ошибкой. Соответственно, существует 50-типроцентная вероятность, что пока работа не будет проделана снова, отменяя ранее проделанную работу, основанную на неправильном результате, работа должна быть приостановлена на время, приблизительно в 10-20 раз большее, чем время, необходимое для выполнения четырех основных арифметических операций.
Как описано выше, способ, использующий медианное значение пиксельных значений в одних и тех же положениях пикселей для n изображений, как значение оценки для обнаружения движущегося объекта, в значительной степени предпочтителен для повышения точности обнаружения по сравнению со способом, использующим среднее значение. В обмен на это преимущество, процессор должен выполнять огромный объем арифметической обработки, чтобы оценить медианное значение по сравнению со средним значением.
Настоящее изобретение было сделано с учетом представленной выше ситуации. Задача настоящего изобретения состоит в обеспечении способа обнаружения движущегося объекта, используя способ укладки, причем способа обнаружения движущегося объекта или возможного его кандидата, способного обнаруживать движущийся объект или возможного его кандидата при меньшем объеме операционных процессов, чем это требуется при использовании оценки медианного значения из пиксельных значений в одних и тех же положениях пикселей на соответствующих наложенных изображениях, в качестве значения оценки для обнаружения движущегося объекта.
РЕШЕНИЕ ПРОБЛЕМЫ
Вариант настоящего изобретения обеспечивает способ (способ обнаружения движущегося объекта) для обнаружения движущегося объекта, являющегося объектом наблюдения, по изображениям, полученным в постоянных интервалах, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей при наложении друг на друга изображений, последовательно перемещая изображения в соответствии с содержанием, соответствующим содержанию оцененного движения движущегося объекта, являющегося объектом наблюдения, в течение постоянных интервалов. Здесь способ содержит этапы, среди которых: этап вычисления среднего значения для ограниченного количества пикселей, на котором вычисляют среднее значение, используя пиксельные значения, которые равны или меньше порогового значения, для отличия движущегося объекта, являющегося объектом наблюдения, от светоизлучающего элемента с более высокой яркостью, чем движущийся объект, причем пиксельные значения являются пиксельными значениями из числа пиксельных значений, находящихся в одних и тех же пиксельных положениях на изображениях, и этап оценки, на котором делают оценку для определения пикселей, находящихся в одних и тех же положениях пикселей на изображениях, средние значения которых, вычисленные на этапе вычисления среднего значения для ограниченного количества пикселей, равны или больше, чем значение критерия, в качестве пикселей, соответствующих движущемуся объекту, являющемуся объектом наблюдения, или соответствующих возможному кандидату на движущийся объект.
Способ может дополнительно содержать этапы, среди которых: этап вычисления среднего значения для всех пикселей, на котором вычисляют среднее значение для всех пикселей в одних и тех же положениях пикселей на изображениях; и этап вычисления порогового значения, на котором вычисляют пороговое значение, умножая среднее значение, вычисленное на этапе вычисления среднего значения для всех пикселей, на заданное число.
Оцененное содержание движения может быть равномерным линейным движением движущегося объекта, являющегося объектом наблюдения в оцененном направлении его движения и с оценочной величиной его движения. Движущийся объект, как объект наблюдения, может обнаруживаться по изображениям, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей, накладывающихся друг на друга на изображениях, последовательно перемещая изображения путем параллельного смещения в оценочном направлении движения и на оценочную величину перемещения движущегося объекта, являющегося объектом наблюдения.
Оцененное содержание движения может быть равномерно ускоренным движением движущегося объекта, являющегося объектом наблюдения, в оценочном направлении его движения с оценочной величиной его перемещения, которая увеличивается или уменьшается во времени на постоянное значение. Движущийся объект, являющийся объектом наблюдения, может быть обнаружен из изображений, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей, наложенных друг на друга на изображениях, путем последовательного перемещения изображений посредством параллельного перемещения в оцененном направлении перемещения и на оценочную величину перемещения движущегося объекта, являющегося объектом наблюдения.
Способ может дополнительно содержать этапы, среди которых: этап группирования, на котором изображения делятся на группы, каждая из которых содержит заданное количество последовательных изображений, следующих друг за другом последовательно во времени; и этап обнаружения, на котором в изображениях обнаруживают движущийся объект, являющий объектом наблюдения, основываясь на результате оценки, полученном на этапе оценки. Здесь, для каждой из групп, на которые были разделены изображения на этапе группирования, могут быть выполнены этап вычисления среднего значения для ограниченного количества пикселей и этап оценки, используя заданное количество изображений, принадлежащих к группе. Если из групп извлекаются возможные кандидаты, совпадающие друг с другом с точки зрения оценочного содержания движения и траектории движения, на этапе обнаружения возможные кандидаты могут обнаруживаться в изображениях как движущийся объект, являющийся объектом наблюдения.
Способ может дополнительно содержать этап фильтрации, на котором: перемещают первое изображение и другое изображение, полученное перед или после этого первого изображения в одном из постоянных интервалов, в соответствии с содержанием, соответствующим уже известному содержанию движения движущегося объекта, который отличается от объекта наблюдения, во время постоянных интервалов; вычитают пиксельные значения в одних и тех же позициях пикселей в другом изображении, наложенном на первое изображение, из пиксельных значений пикселей в первом изображении; и, таким образом, вычисляют пиксельные значения после фильтрации для пикселей в первом изображении. Здесь, на этапе вычисления среднего значения для ограниченного количества пикселей может вычисляться среднее значение пиксельных значений, равных или меньших порогового значения, причем пиксельные значения берутся из числа пиксельных значений после фильтрации в тех же самых положениях пикселей на изображениях, которые получены на этапе фильтрации.
Движущийся объект, являющийся объектом наблюдения, может быть объектом, движущимся по орбите вокруг Земли. Изображения могут быть изображениями, полученными в интервалах во время наблюдения в фиксированных точках.
ПРЕДПОЧТИТЕЛЬНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
При обнаружении движущегося объекта способом укладки настоящее изобретение дает возможность точно обнаруживать движущийся объект или его возможного кандидата при меньшем количестве рабочих процессов, которое требуется, когда в качестве значения оценки для обнаружения движущегося объекта используется медианное значение, вычисленное из пиксельных значений в одних и тех же положениях пикселей на соответствующих наложенных изображениях.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
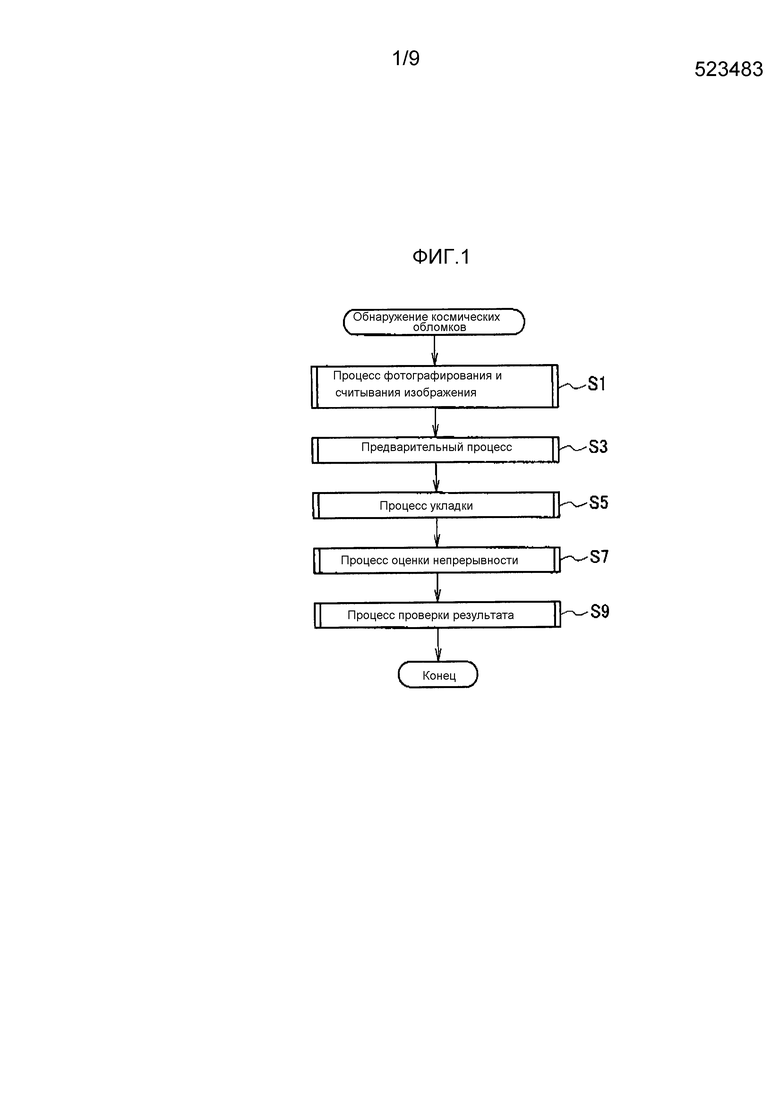
Фиг. 1 - блок-схема последовательности выполнения операций процедуры в случае, когда способ обнаружения движущегося объекта применяется для обнаружения космических обломков по фотографическим астрономическим изображениям.
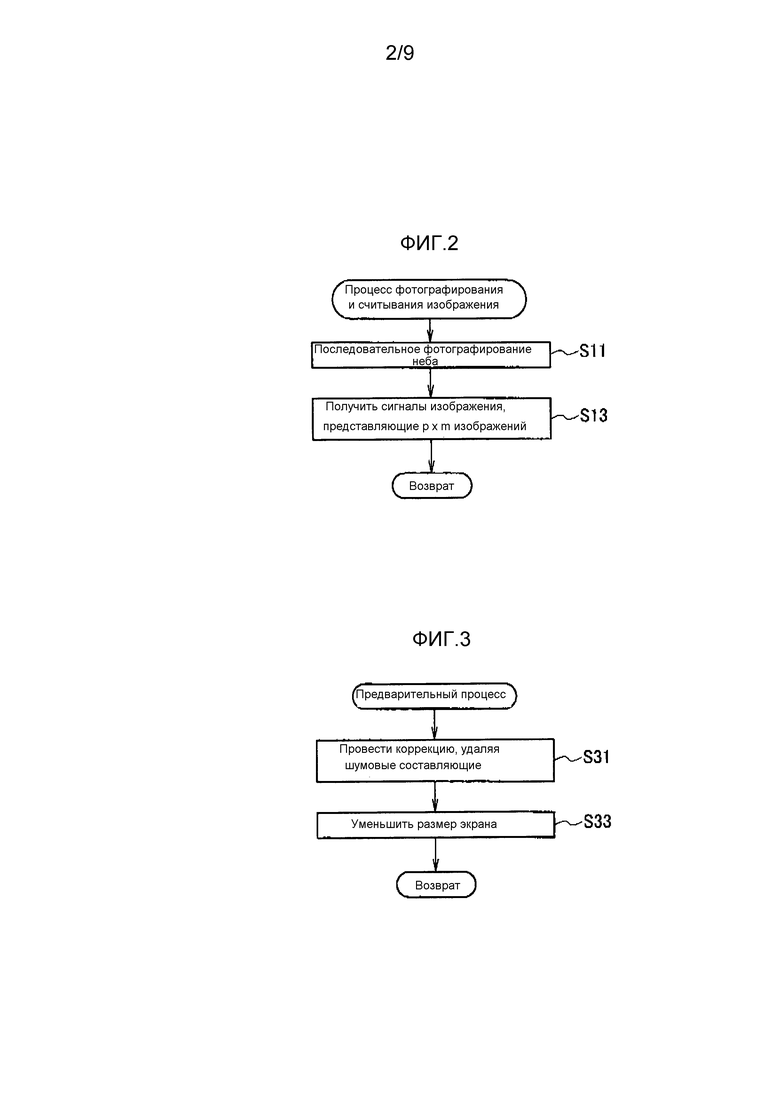
Фиг. 2 - блок-схема последовательности выполнения операций конкретной процедуры этапа процесса фотографирования (получения изображения) и считывания изображения, соответствующего блок-схеме последовательности выполнения операций, показанной на фиг. 1.
Фиг. 3 - блок-схема последовательности выполнения операций конкретной процедуры этапа предварительного процесса, соответствующего блок-схеме последовательности выполнения операций, показанной на фиг. 1.
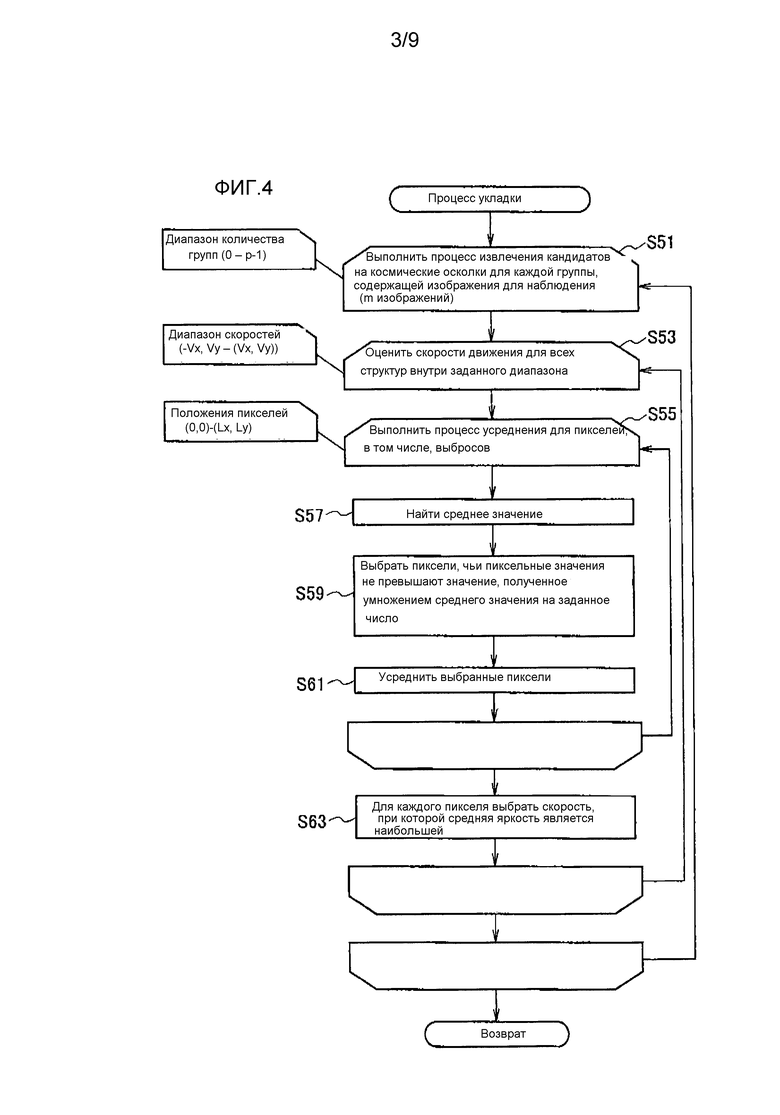
Фиг. 4 - блок-схема последовательности выполнения операций конкретной процедуры этапа процесса укладки, соответствующего блок-схеме последовательности выполнения операций, показанной на фиг. 1.
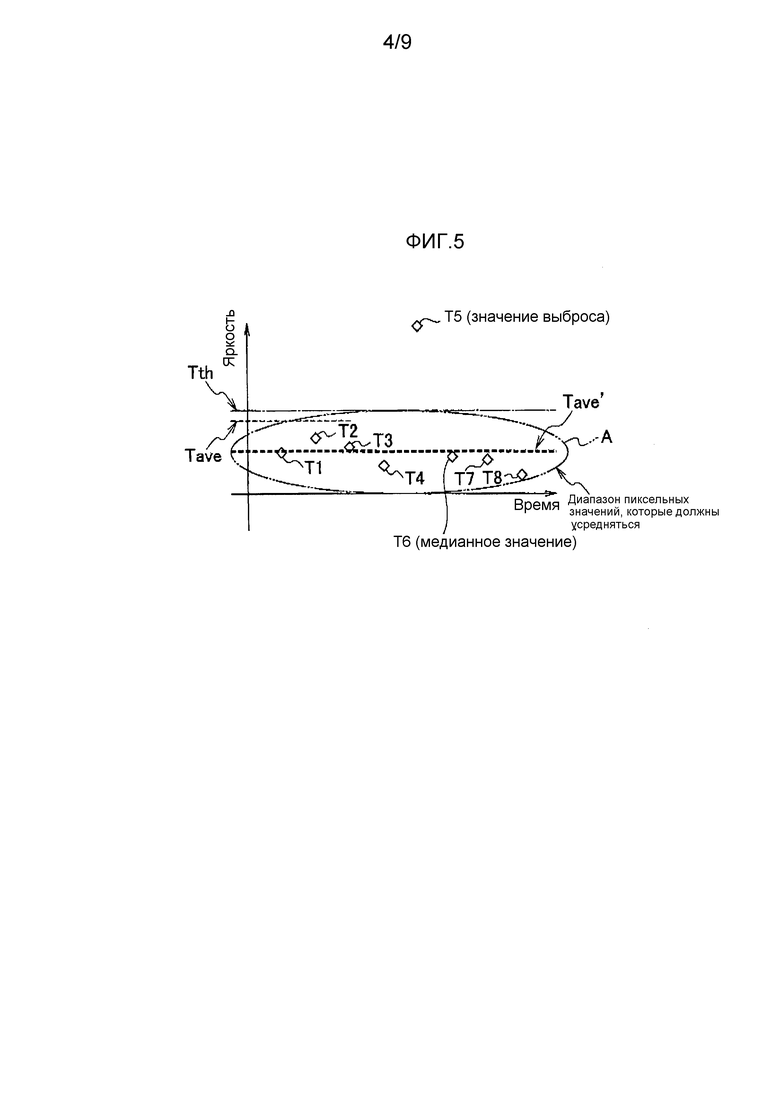
Фиг. 5 - график характеристик среднего значения, которое должно вычисляться, используя пиксельные значения, равные или меньшие, чем пороговое значение на этапе предварительного процесса, показанного на фиг. 1.
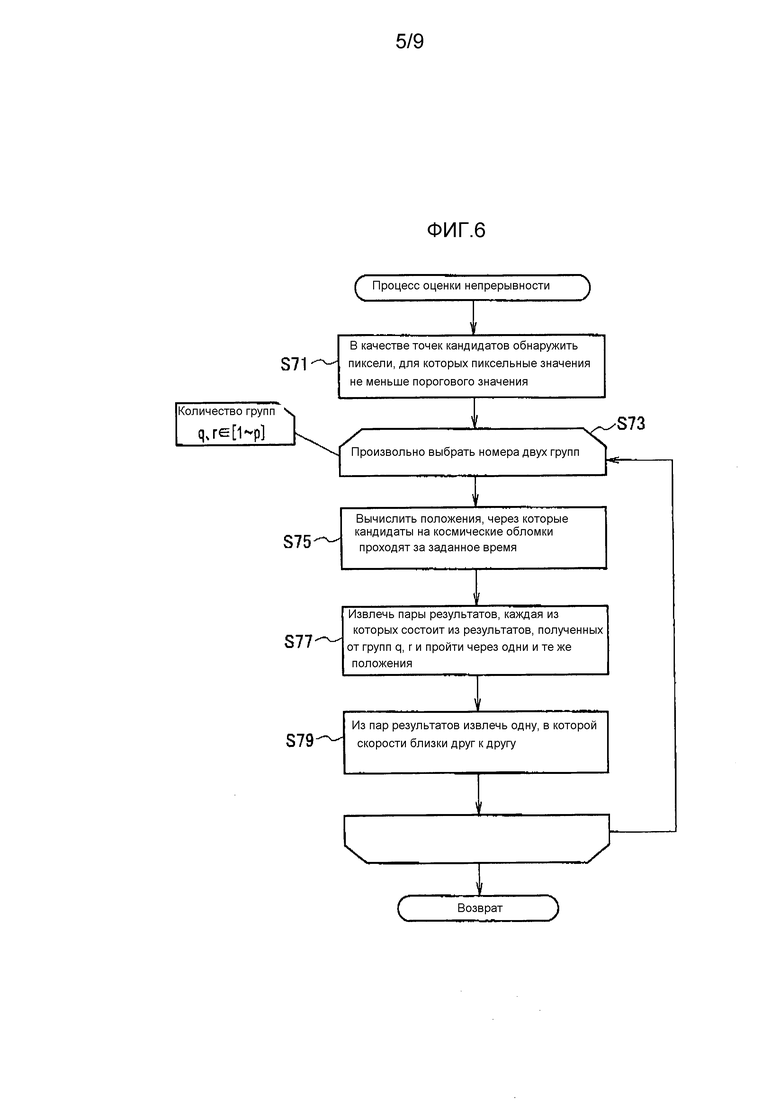
Фиг. 6 - блок-схема последовательности выполнения операций конкретной процедуры для этапа процесса оценки непрерывности в блок-схеме последовательности выполнения операций, показанной на фиг. 1.
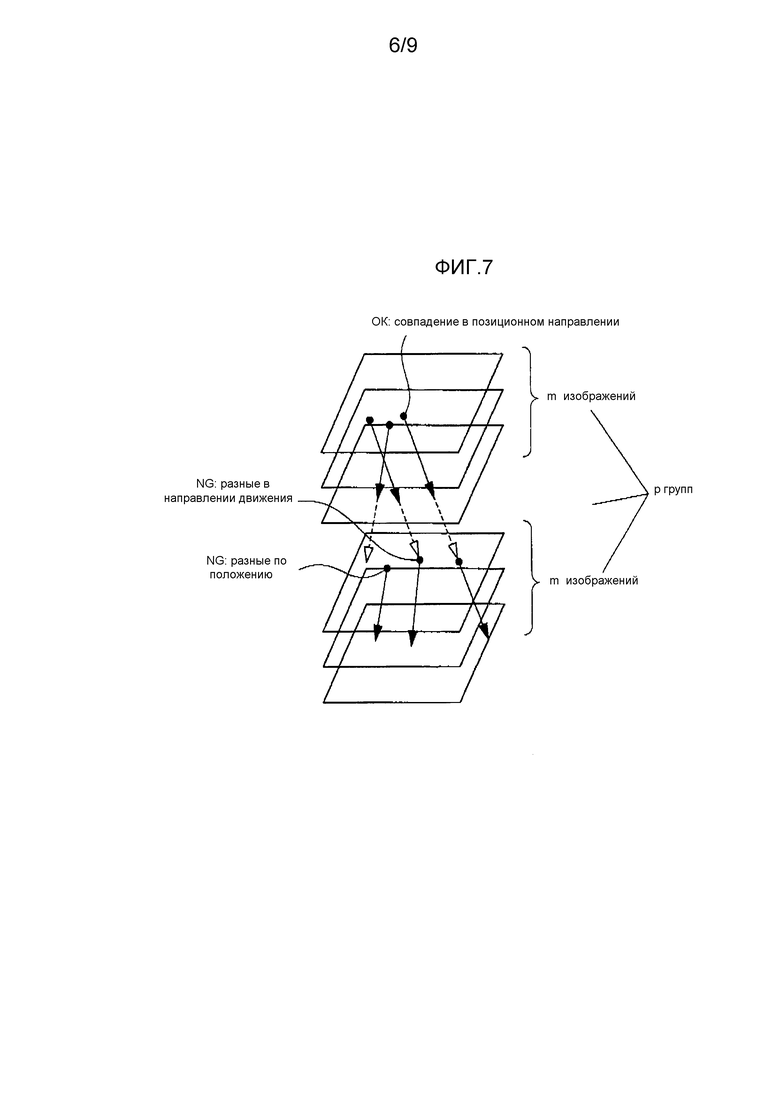
Фиг. 7 - пояснительная диаграмма, схематично показывающая содержание процедуры этапа процесса оценки непрерывности, показанного на фиг. 6.
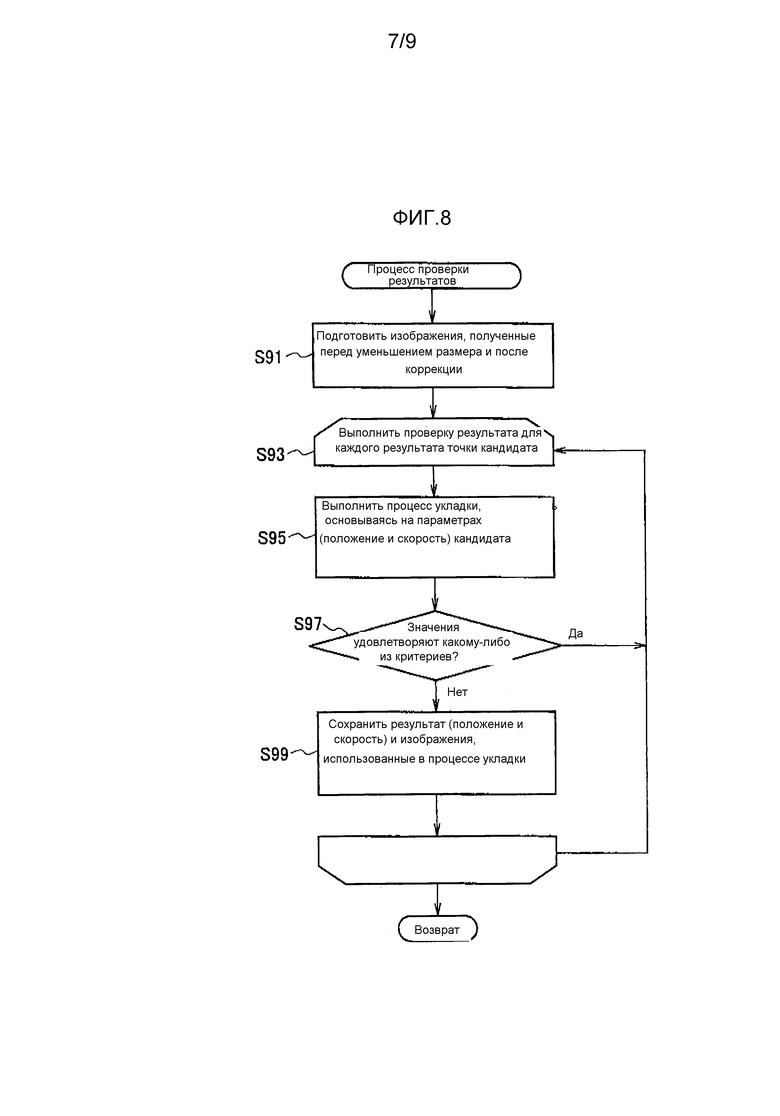
Фиг. 8 - блок-схема последовательности выполнения операций конкретной процедуры для этапа процесса проверки результата в блок-схеме последовательности выполнения операций, показанной на фиг. 1.
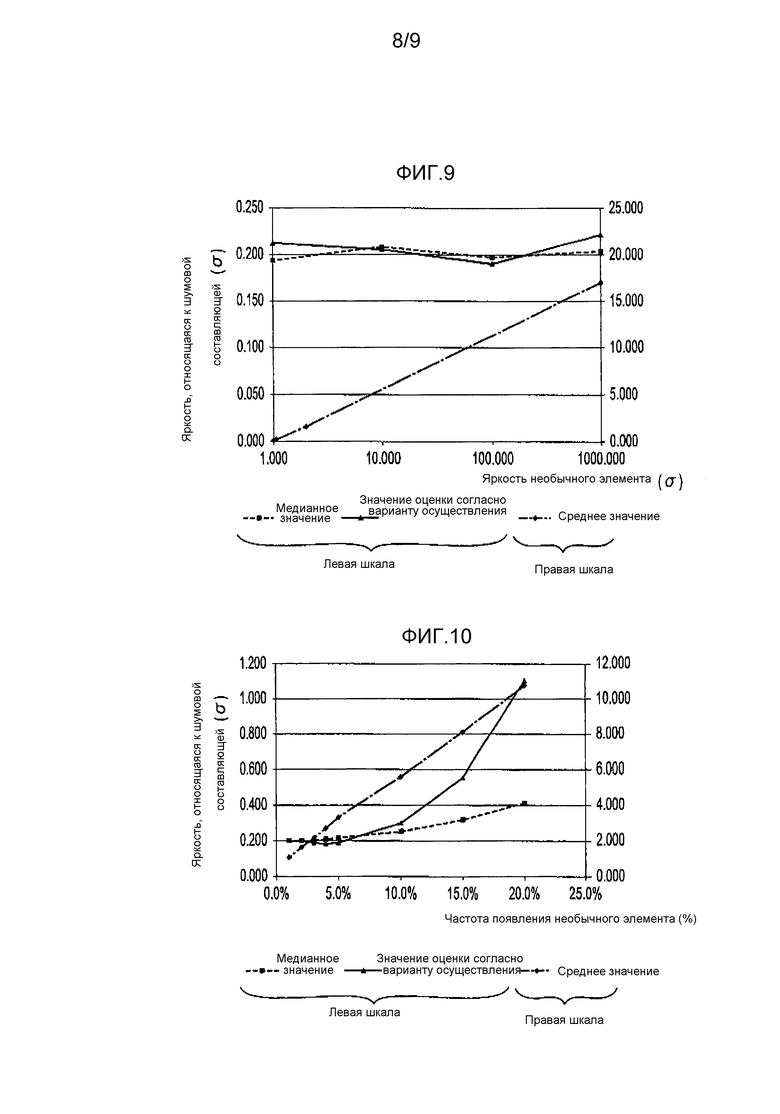
Фиг. 9 - график шумовой составляющей, остающейся в сигнале изображения, в соответствии с изменением яркости необычного элемента, такого как звезда, попавшего в изображения, при сравнении шумовой составляющей со значениями оценки, используемыми для обнаружения космических обломков.
Фиг. 10 - график шумовой составляющей, остающейся в сигнале изображения в соответствии с изменением частоты появления необычного элемента, такого как звезда, полученного в изображениях, при сравнении шумовой составляющей со значениями оценки, используемыми для обнаружения космических обломков.
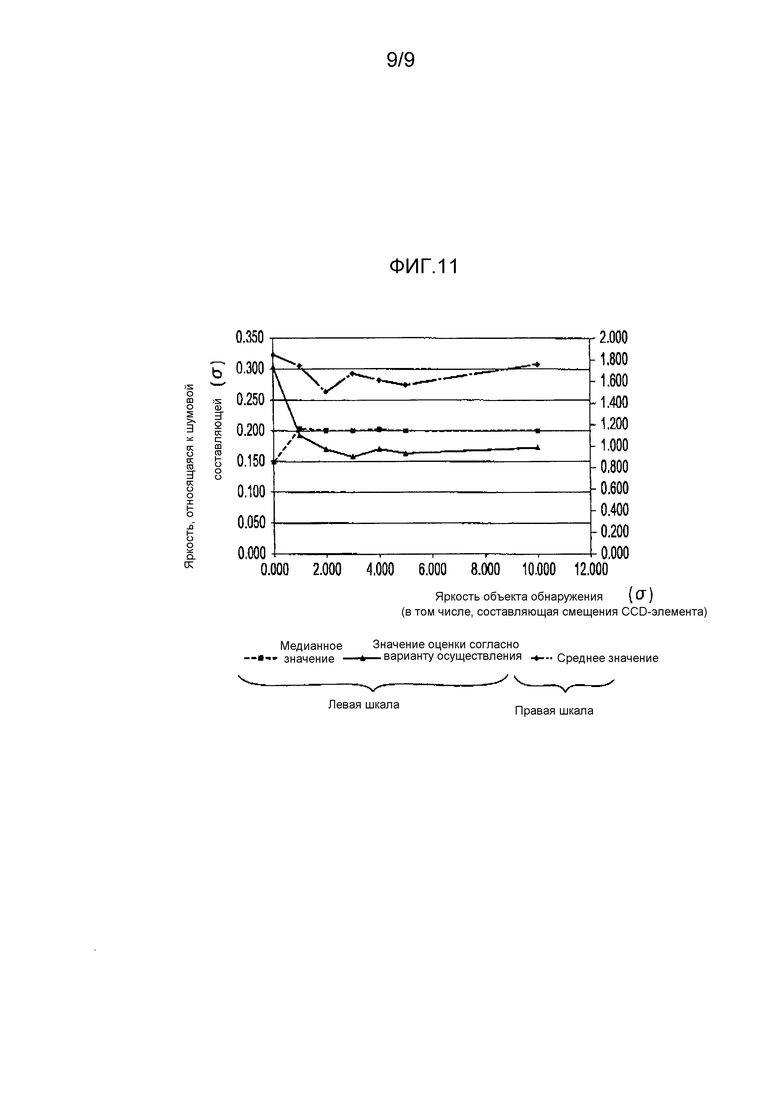
Фиг. 11 - график шумовой составляющей, остающейся в сигнале изображения в соответствии с изменением яркости объекта обнаружения, содержащего компонент CCD-элемента в фотографическом устройстве, при сравнении шумовую составляющую со значениями оценки, используемыми для обнаружения космических обломков.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В соответствии с чертежами, описания будут предоставлены для варианта осуществления, в котором способ обнаружения движущегося объекта, соответствующий настоящему изобретению, применяется для обнаружения космических обломков по сфотографированным астрономическим изображениям.
Способ обнаружения движущегося объекта, соответствующий варианту осуществления, предназначен обнаруживать космические обломки в качестве движущегося объекта по фотографическим астрономическим изображениям. Согласно описанию блок-схемы последовательности выполнения варианта осуществления, показанной на фиг. 1, этот способ предназначен выполнять этап фотографирования (получения изображения) и считывания изображения (этап S1), этап предварительной обработки (этап S3), этап процесса укладки (этап S5), этап процесса оценки непрерывности (этап S7) и этап процесса проверки результата (этап S9).
Как показано на блок-схеме последовательности выполнения операций на фиг. 2, этап процесса фотографирования и считывания изображения (этап S1 на фиг. 1) начинается с повторяющегося получения серии фотографий пространства (неба), содержащего геостационарную орбиту космических обломков, в течение заданной продолжительности времени экспозиции с постоянными временными интервалами (этап S11). Затем этап процесса считывания изображения (этап S1 на фиг. 1) заканчивается получением сигналов изображения, представляющих полученные изображения (этап S13).
Устройство фотографирования (получения изображения) (не показано), образованное, например, соединением CCD-камеры с астрономическим телескопом, может использоваться для получения изображений неба. Дополнительно, в варианте осуществления описанный ниже этап процесса укладки (этап 35 на фиг. 1) выполняется p раз, каждый раз используя m изображений. Другими словами, последовательно фотографируются и получаются в фотографическом устройстве p x m изображений.
После этого, как показано на блок-схеме последовательности выполнения операций, приведенной на фиг. 3, этап предварительного процесса (этап S3 на фиг. 1) начинается с выполнения коррекций сигналов изображения, полученных от фотографического устройства (не показано), удаляя шумовые составляющие, содержащиеся в сигналах изображения (этап S31). После этого, размер изображений, представляющих откорректированные сигналы изображения, уменьшается до размера изображения, которое будет обрабатываться на описанном ниже этапе процесса укладки (этап S5 на фиг. 5) (этап S33). В варианте осуществления размер изображений уменьшается наполовину как в вертикальном, так и в горизонтальном направлениях (на четверть, с точки зрения площади). Затем, наибольшее пиксельное значение 2*2 пикселей перед уменьшением назначается в качестве пиксельного значения одному пикселю после уменьшения. На этом этап предварительного процесса (этап S3 на фиг. 1) заканчивается.
На этапе S31 коррекции проводятся, удаляя шумовые составляющие. Конкретно, коррекции осуществляются, удаляя шумовые составляющие, содержащиеся в сигналах, представляющих изображения, полученные фотографическим устройством (не показано). Типичным примером шумовых составляющих, которые должны быть удалены, является составляющая смещения CCD-элемента в CCD-камере фотографического устройства.
Составляющая смещения CCD-элемента является шумовой составляющей, возникающей, когда изображение фотографического объекта, полученное астрономическим телескопом фотографического устройства (не показано), преобразуется CCD-элементом CCD-камеры в электрический сигнал. Выражаясь конкретно, когда выходной сигнал должен соответствовать нулевой яркости (то есть, когда количество света от фотографического объекта равно нулю), CCD-элемент может в некоторых случаях сдвигать (смещать) фактический выходной сигнал от нулевой точки. Дополнительно, содержание смещения изменяется от одного CCD-элемента к другому.
В качестве меры противодействия этому, когда объект фотографируется при нулевой освещенности, составляющая смещения CCD-элемента корректируется (то есть, подвергается коррекции смещения), чтобы сигнал изображения с выхода фотографического устройства стал равным "0". В этой связи, коррекцию смещения в этом случае называют коррекцией темного. Значение коррекции может быть получено, оценивая значение выходного сигнала CCD-элемента во время фотографирования при закрывании блока светоприемника от попадания света.
Далее, значение коррекции, оцененное таким образом, вычитается из пиксельного значения в каждом из пикселей, который соответствует изображению неба, сфотографированного фотографическим устройством для обнаружения движущегося объекта. Это позволяет корректировать составляющую смещения CCD-элемента.
Другим типичным примером шумовых составляющих, которые должны удаляться от сигналов изображения на этапе S31, является шумовая составляющая, свойственная звезде. Шумовая составляющая, свойственная звезде, появляется, когда звезда, существующая на небе, попадает в изображения со звездой и ее окружающим пространством, выраженная как размытые точки или линии в соответствии со скоростью движения звезды.
Шумовая составляющая, свойственная звезде, может быть исключена из каждого изображения, вычитая пиксельные значения в одних и тех положениях пикселей на двух изображениях, которые накладываются друг друга посредством параллельного перемещения на уже известное значение движения звезды в уже известном направлении движения звезды. Здесь, первое из двух изображений является изображением, полученным фотографическим устройством (не показано), а другое изображение является его предшествующим или последующим изображением, последовательно полученным фотографическим устройством.
С этой целью, шумовая составляющая сигналов изображения, свойственных звезде, удаляется после коррекции темного для составляющей смещения CCD-элемента посредством следующих действий: накладывают каждое из двух последовательных изображений неба, полученных фотографическим устройством для обнаружения движущегося объекта, перемещая два последовательных изображения с помощью параллельного перемещения в соответствии с направлением и величиной движения звезды; и вычитают пиксельные значения пикселей, наложенных друг на друга. Вышесказанное может использоваться в качестве содержания коррекции, которая должна делаться, удаляя шумовые составляющие на этапе S31, показанном на фиг. 3.
Как показано на блок-схеме последовательности выполнения операций на фиг. 4, этап процесса укладки (этап S5 на фиг. 1) начинается с разделения изображений p*m (размер изображения которых равен L=(Lx, Ly)), сфотографированных последовательно фотографическим устройством (не показано) с постоянными временными интервалами, на р групп (наборов), каждая из которых содержит m последовательных изображений, и для каждой группы (p=0-p-1), m изображений подвергают способу укладки и, таким образом, извлекают возможного кандидата на космические обломки (этап S51).
Процесс извлечения возможного кандидата на космические обломки из m изображений достигается, выполняя вычисление с использованием пиксельных значений в одних и тех же положениях пикселей, накладывающихся друг друга, в то же время последовательно перемещая каждое изображение путем его параллельного перемещения с его оцененной скоростью движения космических обломков (то есть, длина (расстояние или интервал) перемещения космических обломков на изображении с его оценочной скоростью движения в пределах заданной продолжительности времени). Последовательно изменяя оценочную скорость движения космических обломков в диапазоне от (-Vx/p,-Vy/p) до (Vx/p, Vy/p), это вычисление выполняется для каждой оценочной скорости движения (этап S53). В этом отношении, причина, почему диапазон оценочной скорости движения равен 1/p, состоит в том, что продолжительность времени равна 1/p; и расстояние перемещения в пределах всей продолжительности времени также равно 1/p.
Дополнительно, вычисление, использующее пиксельные значения в одних и тех же положениях пикселей, накладывающихся друг на друга в m изображениях, выполняется для каждого из положений пикселей (для которых координаты пикселей равны от (0, 0) до (Lx, Ly)) в каждом изображении. Говоря конкретно, процесс усреднения выполняется для пиксельных значений пикселей, исключая пиксельные значения пикселей (выбросы), не удовлетворяющие условия, в одних и тех же положениях пикселей, накладывающихся друг на друга в m изображениях, которые последовательно перемещаются на величину параллельного перемещения с оценочной скоростью V движения космических обломков (этап S55). В этом отношении, условие означает "является меньшим, чем пороговое значение, полученное умножением среднего значения пиксельных значений пикселей на заданное число".
Пороговое значение используется, чтобы отличать космические обломки от объекта, который излучает свет с более высокой яркостью, чем космические обломки (соответствующие светоизлучающему элементу высокой яркости в формуле изобретения). То, каким должно быть установлено пороговое значение, является очень важным параметром для значения, вычисляемого последующим процессом, чтобы отразить снижение яркости (пиксельное значение) движущегося объекта, яркость которого (пиксельное значение) значительно отличается от яркости космических обломков.
По этой причине пороговое значение устанавливается, основываясь на среднем значении всех пиксельных значений, кроме пиксельных значений выбросов в одних и тех же положениях пикселей на наложенных изображениях (умножая среднее значение всех пиксельных значений, кроме пиксельных значении выбросов, на заданное число). Использование порогового значения в качестве критерия яркости (пиксельное значение) космических обломков позволяет точно отличить пиксель, яркость (пиксельное значение) которого сильно отличается от яркости (пиксельного значения) критерия, как пиксель, представляющий существование светоизлучающего объекта, который не является космическими обломками, от пикселя, представляющего существование космических обломков.
Между тем, вышеупомянутое "заданное число", которое управляет пороговым значением, может быть установлено как соответствующее значение, используя статистический способ. Заданное значение может быть установлено, например, в диапазоне 1,5-3. Последующие описания будут обеспечиваться для варианта осуществления, в котором заданное число установлено равным 2.
Прежде всего, m изображений, принадлежащих одной группе (p=0-p-1), установленной на этапе S51, последовательно перемещаются на величину параллельного перемещения с оценочной скоростью движения (одно из значений (-Vx/p,-Vy/p)-(Vx/p, Vy/p)) космических обломков, установленной на этапе S53. Далее оценивается среднее значение пиксельных значений в одних и тех же положениях пикселей объекта ((0, 0)-(Lx, Ly)), накладывающихся друг на друга, на наложенных изображениях, установленных на этапе S55 (этап S57).
Здесь далее, используя пороговое значение, полученное умножением оцененного среднего значения на два (заданное число), выбираются пиксели, для которых пиксельные значения равны или меньше, чем пороговое значение (этап S59). Вычисляется среднее значение пиксельных значений для выбранных пикселей (этап S61). Следует заметить, что вычисление среднего значения на этапе S61 определяется как невозможное, если доля пикселей, для которых пиксельные значения равны или меньше, чем 0,5 от среднего значения, вычисленного на этапе S57, относительно всех пикселей, превышает 50%.
Среднее значение, вычисленное, используя описанную выше процедуру на этапе S61, представлено на графике, показанном на фиг. 5. Прежде всего, ромбы, нанесенные на график на фиг. 5, представляют пиксельные значения (яркости) T1-T8 в одних и тех же положениях пикселей объекта, где объекты на изображениях перекрывают друг на друга в наложенном состоянии. Здесь по горизонтальной оси на фиг. 5 представляются моменты времени, в которые фотографируются изображения, к которым относятся изображения, соответствующие нанесенным на график пиксельным значениям T1-T8, в то время как вертикальная ось на фиг. 5 представляет яркости, соответствующие пиксельным значениям.
Среднее арифметическое значение Tave пиксельных значений T1-ТВ в одних и тех же положениях пикселей на изображениях представляется на фиг. 5 тонкой пунктирной линией. Кроме того, пороговое значение Tth, полученное умножением среднего арифметического значения Tave на заданное число, представляется на фиг. 5 штрих-пунктирной линией. Дополнительно, среднее значение Tave' пиксельных значений T1-T4, T6-T8, принадлежащих к диапазону А пиксельных значений, которые равны или меньше, чем пороговое значение Tth и являются объектами, которые должны усредняться, представляется на фиг. 5 толстой пунктирной линией. Среднее значение Tave' является значением, которое вычисляется на этапе S61 и гораздо ближе к пиксельному значению T6, медианному значению, чем среднее арифметическое значение Tave пиксельных значений T1-T8.
После этого выполняется вычисление, использующее пиксельные значения в одних и тех же положениях пикселей, накладывающихся друг на друга на наложенных изображениях для каждого из положений пикселей (пиксельными координатами которых являются (0, 0)-(Lx, Ly)) (этапы S55-S61). После этого, каждый раз, когда вычисленная скорость V движения космических обломков, используемая для последовательного перемещения m изображений на величину параллельного перемещения, изменяется с одной на другую в диапазоне от (-Vx/p,-Vy/p) до (Vx/p, Vy/p) (этап S53), выбирается (или обновляется) вычисленная скорость V движения, при которой среднее значение, вычисленное на этапе S61, является наибольшим (этап S63).
Дополнительно, когда вычисленная скорость V движения, при которой среднее значение, вычисленное на этапе S61, является наибольшей, выбирается (или обновляется), основываясь на средних значениях, которые вычислены на этапе S61 для всех вычисленных скоростей V движения (V=(-Vx/p,-Vy/p)-(Vx/p, Vy/p)) (этапы S53-S63), предшествующие процессы выполняются для всех остальных групп (от p=0 до p-1).
Когда предшествующие процессы завершаются для всех групп (p=0-p-1) (этапы S51-S63), этап процесса укладки (этап S5 на фиг. 1) заканчивается.
Затем, как показано на блок-схеме последовательности выполнения операций, представленной на фиг. 6, этап процесса вычисления непрерывности (этап S7 на фиг. 1) начинается с обнаружения пикселей, пиксельные значения которых равны или больше порогового значения (значения критерия для возможного кандидата, соответствующего значению критерия в формуле изобретения), требующиеся для того, чтобы определить возможного кандидата на космические обломки как возможные точки космических обломков (этап S71). Следует заметить, что эти пиксели также представляют пиксели, для которых среднее значение их пиксельных значений, вычисленное на этапе S61, основываясь на вычисленной скорости V движения, выбранной на этапе S63, становится наибольшим.
Далее, из групп p выбираются две произвольные группы (q, r ∈ [1, p]) (этап S73). Для каждой группы q, r вычисляется, относительно какого пикселя в каждом изображении кандидат на космические обломки, обнаруженные на этапе S71, проходит за общее заданное время (этап S75).
После этого извлекаются пары, каждая из которых состоит из возможного кандидата на космические обломки из группы q и возможного кандидата на космические обломки из группы r, которые проходят через одни и те же положения пикселей (или альтернативно, соседние положения пикселей в пределах заданных диапазонов) за заданное время (этап 377). Например, на фиг. 7 показано, что из трех точек кандидатов на космические обломки, полученных в самом верхнем изображении в нижней группе на чертеже, две располагаются на дополнительных линиях относительно траекторий движения двух из трех точек кандидатов на космические обломки, полученных в каждом изображении в верхней группе на чертеже. Поэтому две точки кандидатов соответствуют паре, проходящей через одни и те же положения пикселей за заданное время.
Далее, из пар кандидатов на космические обломки, извлеченных на этапе S77 (смотрите фиг. 6), пара кандидатов на космические обломки, вычисленные скорости V движения которых в соответствующих группах q, r близки друг к другу (то есть, попадают в пределы заданного диапазона ошибки), извлекаются в качестве конечных кандидатов на космические обломки (этап S79). Например, на фиг. 7 показано, что точки кандидатов на космические обломки, маркированные как "OK: совпадение в позиционном направлении", располагаются на чертеже в одном и том же позиционном направлении в обеих группах, верхней и нижней. Поэтому эта пара соответствует паре, совместно использующей одну и ту же вычисленную скорость V движения, содержащую направленные составляющие.
С другой стороны, точки кандидатов на космические обломки, маркированные как "NG: различные в направлении перемещения" отличаются друг от друга в направлении движения между верхней и нижней группами на чертеже. Поэтому эта пара не соответствует паре, совместно использующей одну и ту же вычисленную скорость V движения, содержащую направленные составляющие.
Дополнительно, точки кандидатов на космические обломки, маркированные как "NG: другое по положению" находятся на одном и том же самом направлении движения в верхней и нижней группах на чертеже. Однако, точка кандидата на космические обломки, полученная в верхнем изображении в нижней группе на чертеже, не находится на добавочной линии относительно траектории движения точки кандидата для космических обломков, полученной в изображениях в верхней группе на чертеже. Поэтому эта пара не соответствует паре, проходящей через одно и то же положение пикселя в заданное время.
Кроме того, оценочные яркости с кандидатов на космические обломки из групп q, r, извлеченных на этапе S77, вычисляются на этапе S79. Как для пар кандидатов на космические обломки, извлеченных на этапе S79, так и для конечных кандидатов на космические обломки, предполагаемые яркости с соответствующих кандидатов на космические обломки от групп q, r вычисляются, используя уравнение с=√(a*b), где a и b обозначают максимальные средние пиксельные значения (выбранные на этапе S63 на фиг. 4) относящиеся к точкам кандидатов, соответственно. Что касается других пар кандидатов на космические обломки в группах q, r, которые не извлекаются в качестве конечных кандидатов на космические обломки, их предполагаемые яркости с устанавливаются как c=0.
Когда конечные кандидаты на космические обломки извлекаются из соответствующих групп q, r и их яркости с вычислены (этапы S73-S79), конечные кандидаты на космические обломки извлекаются из другой пары групп и вычисляются их яркости с. В этом отношении, например, если количество групп p равно трем, конечные кандидаты на космические обломки извлекаются из групп 1, 2 и из групп 2, 3 и их яркости с вычисляются. Здесь, конечные кандидаты на космические обломки могут дополнительно извлекаться из групп 1, 3 и их яркости с также могут быть вычислены. Этап процесса оценки непрерывности (этап 7 на фиг. 1), следовательно, заканчивается.
Как показано на блок-схеме последовательности выполнения операций на фиг. 8, на этапе S9 процесса проверки результата, показанном на фиг. 1, для всех пар, извлеченных на этапе S77 в качестве конечных кандидатов на космические обломки, m изображений перед уменьшением размера на этапе S33 на фиг. 3, но после коррекции на этапе S31 на фиг. 3, являются в первую очередь подготовленными от каждой из групп, к которым принадлежат пары (этап S91). Затем, используя таким образом подготовленные изображения, каждый конечный кандидат проверяется, может ли он быть обнаружен как космические обломки (этап S93).
Для этого процесса проверки процесс укладки, который должен выполняться на этапе процесса укладки на этапе S5, показанном на фиг. 5, выполняется на конечном кандидате на космические обломки, используя изображения перед уменьшением размеров, которые подготавливаются на этапе S91 (этап S95). В этом процессе пиксельное значение кандидата на космические обломки от каждой из групп, соответствующее конечной паре кандидатов на космические обломки, устанавливается с предполагаемой яркостью с, вычисленной на этапе S79, показанном на фиг. 6.
После этого проводится оценка, удовлетворяется ли любой из следующих критериев: критерий, что среднее пиксельное значение в точке кандидата на космические обломки, полученной в результате процесса укладки, равно или меньше, чем пороговое значение (значение критерия кандидата, соответствующее значению критерия, описанного в формуле изобретения), требующееся для точки кандидата, чтобы быть выбранной в качестве кандидата на космические обломки, который используется в процессе этапа S71, представленного на фиг. 6; критерий, что пиксельные значения большинства соседних пикселей равны или меньше, чем среднее пиксельное значение; и критерий, что пиксельные значения большинства соседних пикселей составляют меньше, чем 70% от порогового значения. Если один из критериев удовлетворяется (если YES (да) на этапе S97), процесс возвращается к этапу S93.
С другой стороны, если ни один из критериев не удовлетворяется, то есть, если среднее пиксельное значение в точке кандидата на космические обломки больше, чем пороговое значение (значение критерия кандидата, соответствуя значению критерия в формуле изобретения), требующееся для точки кандидата, чтобы быть выбранной в качестве кандидата на космические обломки, и если большинство соседних пикселей попадает за пределы вышеупомянутых критериев (если NO (нет) на этапе S97), то тогда то, что получают в точке кандидата, обнаруживается как часть космических обломков, представленных пикселем в точке кандидата и его соседними пикселями, имеющими схожие пиксельные значения, и которые, в целом, принимают круглую или эллиптическую форму. Затем, результат обнаружения сохраняется вместе с изображениями, используемыми в процессе укладки на этапе S95 (этап S99).
Был описан вариант осуществления, в котором как яркость в точке кандидата, так и яркость соседних с ней пикселей, используются в качестве критериев для принятия решения по космическим обломкам. Следует, однако, заметить, что решение о космических обломках может быть принято, основываясь на любой яркости.
Когда процессы этапов S93-S99 завершаются для всех конечных кандидатов на космические обломки, этап процесса проверки результата (этап S9 на фиг. 1) заканчивается.
Как ясно из предшествующих описаний, вариант осуществления делает этап S61 на фиг. 4 соответствующим этапу вычисления среднего значения для ограниченного количества пикселей в формуле изобретения. Кроме того, вариант осуществления делает этап S71 на фиг. 6 соответствующим этапу оценки в формуле изобретения.
Дополнительно, вариант осуществления делает этап S57 на фиг. 4 соответствующим этапу вычисления среднего значения для всех пикселей в формуле изобретения. Кроме того, вариант осуществления делает этап S59 на фиг. 4 соответствующим этапу вычисления порогового значения в формуле изобретения.
Кроме того, вариант осуществления делает этап S51 на фиг. 4 соответствующим этапу группирования в формуле изобретения. Дополнительно, вариант осуществления делает этапы 37, 39 в блок-схеме последовательности выполнения операций, показанной на фиг. 1, соответствующей этапу обнаружения в формуле изобретения.
Дополнительно, вариант осуществления делает процесс коррекции шумовой составляющей, выполняемый на этапе S31 на фиг. 3, для удаления "шумовой составляющей, свойственной звезде", соответствующим этапу фильтрации в формуле изобретения.
Способ обнаружения космических обломков варианта осуществления, который следует предшествующим процедурам, содержит этап процесса укладки, который должен выполняться на этапе S5, показанном на фиг. 1, используя способ укладки, в котором в качестве значения оценки для обнаружения космических обломков вместо медианного значения пиксельных значений оценивается среднее значение пиксельных значений, исходя из пиксельных значений в тех же самых положениях пикселей, которые накладываются друг на друга на наложенных m изображениях.
В этом отношении, допустим, что предполагаемая скорость V движения космических обломков (расстояние, на которое космические обломки движутся за период времени, соответствующий наложению), задается как V=(±Vx, ±Vy); размер L изображения задается как L=(Lx, Ly); предполагаемая скорость V и размер L изображения задаются как Vx=Vy=200 (то есть, V=(±200, ±200)) и Lx=Ly=2000, соответственно; и количество изображений, которые должны использоваться для обнаружения, задается как n=32.
Когда расстояние, на которое космические обломки перемещаются за период времени, соответствующий наложениям, вычисляются путем изменения и наложения пиксели на однозначной основе, для движущегося объекта могут быть оценены скорости движения V (±Vx)*(±Vy). В результате, когда оценивают пиксельные значения соответствующих (Lx*Ly) пикселей для всех предполагаемых скоростей для n изображений, количество необходимых рабочих процессов составляет (2Vx)*(2Vy)x(Lx)*(Ly)x n=400 * 400D * 2000 * 2000×32=2,0*1013.
Дополнительно, как обсуждалось ранее, оценка медианных значений пиксельных значений требует выполнения nlog(n) процессов сравнения и операций назначения. Напротив, 2n процессов суммирования и n процессов сравнения достаточно, чтобы оценить средние значения пиксельных значений.
Вычисление средних значений, которое может быть сделано, выполняя в итоге 2n+n(=3n) рабочих процессов, требует гораздо меньшего количества операций, чем вычисление медианных значений, для которого необходимо nlog(n) процессов сравнения и 1,5×nlog(n) операций назначения, где количество операций назначения в 1,5(3*50%) раз больше, чем количество процессов сравнения.
Дополнительно, когда процессор в ходе 3n рабочих процессов выполняет исполнение по предположению, вероятность, что исполнение по предположению оказывается успешным при осуществлении одного и того же варианта подряд, составляет приблизительно 96,1%, что получается как (98%*98%)+(2%*2%), потому что вероятность, что в изображениях существуют пиксели, захватывающие звезду и т.п., движущийся объект, который не является космическими обломками, составляет приблизительно 2%. Другими словами, вероятность, что исполнение по предположению приводит к отказу, составляет приблизительно 3,9% и гораздо ниже, чем вероятность, что процессы сортировки значений (три операции назначения) выполняется после nlog(n) процессов сравнения, то есть, 50%-ая вероятность, что исполнение по предположению приводит к отказу в результате отсутствия повторения одной и той же операции.
Кроме того, в способе обнаружения космических обломков, соответствующем варианту осуществления, пороговое значение, полученное умножением среднего значения пиксельных значений в одних и тех же положениях пикселей на наложенных изображениях на заданное число (например, два), используется для отличия космических обломков от объекта, излучающего свет более высокой яркости, чем космические обломки (соответствующего светоизлучающему элементу высокой яркости в формуле изобретения).
Поэтому среднее пиксельное значение меньше отражает яркость (пиксельное значение) светоизлучающего элемента высокой яркости (шумовая составляющая), такого как звезда или космический луч в астрономическом небе, полученной в пикселях, чем среднее значение, оцениваемое простым усреднением пиксельных значений в одних и тех же положениях пикселей на наложенных изображениях. Другими словами, среднее значение, вычисленное усреднением только пиксельных значений, которые равны или меньше, чем пороговое значение, полученное умножением среднего значения пиксельных значений в одних и тех же положениях пикселей на наложенных изображениях на заданное число (например, два), ближе к яркости (пиксельному значению) космических обломков, чем среднее пиксельное значение, полученное простым усреднением пиксельных значений в одних и тех же положениях пикселей на наложенных изображениях.
Соответственно, когда используя способ укладки, обнаруживаются космические обломки, использование среднего значения пиксельных значений, равных или меньших порогового значения, в качестве значения оценки для обнаружения космических обломков позволяет точно обнаруживать возможного кандидата пикселя, захватывающего космические обломки, и затем самих космических обломков при меньшем количестве рабочих процессов, чем это требуется, когда в качестве значения оценки для космических обломков используется медианное значение, вычисленное из пиксельных значений в тех же самых положениях пикселей на наложенных изображениях.
Упомянутое выше пороговое значение, однако, может определяться независимо от среднего значения пиксельных значений в одних и тех же положениях пикселей на наложенных изображениях.
Как показано на графиках на фиг. 9-11, шумовая составляющая в сигнале изображения будет здесь далее сравниваться для случая, когда значение оценки для обнаружения космических обломков является значением оценки, используемым в способе обнаружения варианта осуществления, и случая, когда значение оценки для обнаружения космических обломков является средним значением или медианным значением пиксельных значений в тех же самых положениях пикселей на наложенных изображениях.
На фиг. 9 показан график шумовой составляющей, остающейся в сигнале изображения в соответствии с изменением в яркости необычного элемента, такого как звезда, полученного в изображениях путем сравнения шумовой составляющей из числа значений оценки, используемых для обнаружения космических обломков. Этот график показывает, как изменяется шумовая составляющая в соответствии с изменением яркости необычного элемента в диапазоне от 1σ до 1000σ, когда количество наложенных изображений равно 40, частота (вероятность) появления необычного элемента равна 2% и составляющая смещения CCD-элемента в фотографическом устройстве равна lσ.
Следует заметить, что по горизонтальной оси на фиг. 9 представлен диапазон яркости необычного элемента; и по вертикальной оси на фиг. 9 представлено отношение RMSE (среднеквадратичная ошибка) после процессов, то есть, квадратный корень шумовой составляющей, или, другими словами, σ исходного сигнала (дисперсия ошибки=RMSE). Дополнительно, шумовые составляющие, соответствующие медианному значению, и значение оценки варианта осуществления, соответственно указанные тонкой линией и толстой линией на графике, считываются по шкале вдоль левой вертикальной оси, и дополнительно, шумовая составляющая, соответствующая среднему значению, обозначенная пунктирной линией, считывается по шкале вдоль правой вертикальной оси.
В случае, когда значение оценки для космических обломков является медианным значением, и в случае, когда значение оценки для обнаружения космических обломков является значением оценки, соответствующим варианту осуществления, в сигнале изображения существует только шумовая составляющая приблизительно 0,2σ, независимо от того, насколько высок или низок диапазон яркости необычного элемента. В отличие от этого, в случае, когда значение оценки для космических обломков является средним значением, шумовая составляющая пропорционально растет с увеличением диапазона яркости необычного элемента. В частности, когда яркость необычного элемента возрастает до 1000σ, шумовая составляющая, которая приблизительно в 1000 раз больше, чем шумовые составляющие, соответствующие медианному значению, и значение оценки, соответствующее варианту осуществления становится присутствующим в сигнале изображения.
Соответственно, из графика, показанного на фиг. 9, можно понять, что значение оценки варианта осуществления позволяет обнаруживать космические обломки с настолько большой точностью, насколько это позволяет медианное значение, используемое в качестве значения оценки для обнаружения космических обломков, и позволяет обнаруживать космические обломки с гораздо более высокой точностью, чем среднее значение, используемое в качестве значения оценки для обнаружения космических обломков.
Далее, на фиг. 10 представлен график, показывающий шумовую составляющую, остающуюся в сигнале изображения в соответствии с изменением частоты появления необычного элемента, такого как звезда, полученная в изображениях, сравнивая шумовую составляющую со значениями оценки, используемыми для обнаружения космических обломков. Этот график показывает, как шумовая составляющая изменяется в соответствии с изменением частоты (вероятностью) появления необычного элемента в диапазоне от 1,0% до 25,0%, когда количество наложенных изображений равно 40; составляющая смещения CCD-элемента в фотографическом устройстве равна 1σ и диапазон яркости необычного элемента, такого как звезда, полученного в изображениях, составляет 100σ.
Следует заметить, что по горизонтальной оси на фиг. 10 представлена частота появления необычного элемента, а по вертикальной оси на фиг. 10 представлено отношение RMSE (среднеквадратичной ошибки) после процессов, то есть, извлечения квадратного корня шумовой составляющей или, другими словами, исходного сигнала (дисперсия ошибки=RMSE). Дополнительно, шумовые составляющие, соответствующие медианному значению, и значение оценки варианта осуществления, соответственно указанные на графике тонкой линией и толстой линией, считываются по шкале вдоль левой вертикальной оси. Кроме того, шумовая составляющая, соответствующая среднему значению, указанному пунктирной линией, считывается по шкале вдоль правой вертикальной оси.
В случае, когда значение оценки для космических обломков является значением оценки варианта осуществления, в то время как частота появления необычного элемента находится в диапазоне, равном или меньшем, чем 6-7%, шумовая составляющая в сигнале изображения является такой же малой или равной или меньшей, чем шумовая составляющая, соответствующая медианному значению, используемому в качестве значения оценки для космических обломков. Однако, когда частота появления необычного элемента превышает 6-7%, шумовая составляющая становится большей, чем шумовая составляющая, соответствующая медианному значению, используемому в качестве значения оценки для космических обломков.
Дополнительно, в случае, когда значение оценки для космических обломков является значением оценки в варианте осуществления, шумовая составляющая в сигнале изображения гораздо ниже, чем шумовая составляющая, соответствующая среднему значению, используемому в качестве значения оценки для космических обломков, независимо от того, насколько высокой или низкой является частота появления.
В этом отношении, на точность обнаружения космических обломков больше всего оказывает воздействие существование звезды и вероятность, что звезда попадает в полученные изображения, составляет приблизительно 2%. Учитывая эти факты, можно понять, что значение оценки, используемое в варианте осуществления, дает возможность обнаруживать космические обломки с такой же или с большей точностью, чем когда в качестве значения оценки для обнаружения космических обломков используется медианное значение, и позволяет обнаруживать космические обломки с гораздо более высокой точностью, чем когда для обнаружения космических обломков в качестве значения оценки используется среднее значение.
Затем, на фиг. 11 представлен график, показывающий шумовую составляющую, остающуюся в сигнале изображения в соответствии с изменением яркости объекта обнаружения, содержащей составляющую нижней части характеристики CCD-элемента в фотографическом устройстве, при сравнении шумовой составляющей со значениями оценки, используемыми для обнаружения космических обломков. Этот график показывает, как меняется шумовая составляющая в соответствии с изменением яркости объекта обнаружения, содержащего составляющую смещения CCD-элемента в диапазоне от 0,0σ до 12σ, когда количество наложенных изображений равно 40, частота (вероятность) появления необычного элемента, такого как звезда, попадающего в изображения, составляет 2%, и диапазон яркости необычного элемента равен 100σ.
Следует заметить, что по горизонтальной оси на фиг. 11 представляется яркость объекта обнаружения, содержащая составляющую смещения CCD-элемента в фотографическом устройстве; а по вертикальной оси на фиг. 11 представляется отношение RMSE (среднеквадратичной ошибки) после обработки, то есть, извлечения квадратного корня шумовой составляющей, или, другими словами, σ исходного сигнала (дисперсия ошибки = RMSE). Кроме того, шумовые составляющие, соответствующие медианному значению, и значение оценки варианта осуществления, соответственно обозначенные на графике тонкой линией и толстой линией, считываются по шкале вдоль левой вертикальной оси. Кроме того, шумовая составляющая, соответствующая среднему значению, указанному пунктирной линией, считывается по шкале вдоль правой вертикальной оси.
В случае, когда значение оценки для космических обломков является значением оценки варианта осуществления, хотя яркость объекта обнаружения, содержащая составляющую смещения CCD-элемента, находится в диапазоне, равном или большем, чем приблизительно 1σ, шумовая составляющая в изображении сигнала меньше, чем шумовая составляющая, соответствующая медианному значению, используемому в качестве значения оценки для космических обломков.
Дополнительно, в случае, когда значение оценки для космических обломков является значением оценки варианта осуществления, шумовая составляющая в сигнале изображения гораздо ниже, чем шумовая составляющая, соответствующая среднему значению, используемому в качестве значения оценки для космических обломков, независимо от того, является ли высокой или низкой яркость объекта обнаружения, содержащая составляющую смещения CCD-элемента.
По этой причине, можно понять, что когда яркость космических обломков равна или больше, чем приблизительно 1σ, использование значения оценки варианта осуществления дает возможность обнаруживать космические обломки с высокой точностью или с более высокой точностью, чем при использовании медианного значения в качестве значения оценки для обнаружения космических обломков, и позволяет обнаруживать космические обломки с гораздо более высокой точностью, чем при использовании среднего значения в качестве значения оценки для обнаружения космических обломков.
В варианте осуществления изображения, полученные фотографическим устройством (не показано), делятся на группы p, каждая из которых содержит m изображений, и для каждой группы выполняется этап процесса укладки (этап S5 на фиг. 1). Однако, этап процесса укладки (этап S5 на фиг. 1) может выполняться на всех изображениях, полученных в пакете, одновременно, не разделяя изображения в группы.
В этом случае этап процесса укладки может осуществляться способом, при котором этап процесса оценки непрерывности, показанный на блок-схемах последовательности выполнения операций, показанных на фиг. 1 и 6, пропускается, и в результате этапа процесса проверки, показанного на фиг. 8, пиксели, имеющие наибольшее пиксельное значение при предполагаемой скорости V движения, выбранной на этапе S63 на фиг. 4, и наибольшее пиксельное значение используются вместо пикселей, вычисленных на этапе S79 на фиг. 6 в качестве конечных возможных кандидатов на космические обломки, и их яркости C.
Тем не менее, когда подобно варианту осуществления полученные изображения делятся на группы p и этап процесса укладки выполняется для каждой группы, оценка того, являются ли возможные кандидаты на космические обломки, обнаруженные в каждой группе, непрерывными относительно друг друга с точки зрения направления движения, скорости движения и перемещения положения, может быть добавлена в решение по космическим обломкам. Таким образом, космические обломки могут быть точно обнаружены даже при том, что среднее пиксельное значение, требующее меньшего объема операций, используется в качестве значения оценки для обнаружения космических обломков.
Дополнительно, технология удаления шумовой составляющей, свойственной звезде, которая была объяснена как часть коррекции, которая должна проводиться, удаляя шумовые составляющие на этапе S31 на фиг. 3, может применяться к движущемуся объекту, отличному от космических обломков, движущемуся объекту, не являющемуся звездой, который не является объектом обнаружения, и может использоваться в качестве технологии удаления шумовой составляющей в полученных изображениях, в которых присутствует движущийся объект. Однако, поскольку каждые два последовательно полученных изображения накладываются друг на друга в соответствии с относительным движением, содержание движения движущегося объекта (то есть, параметры движения) во время каждого интервала фотографирования (например, направление и величина перемещения движущегося объекта в случае, когда движущийся объект находится в состоянии равномерного прямолинейного движения) должно быть известно заранее.
Кроме того, предшествующие описания были представлены для варианта осуществления, в котором настоящее изобретение осуществляется как способ обнаружения космических обломков. Однако, настоящее изобретение широко применимо к обнаружению движущегося объекта, отличного от космических обломков, из изображений, полученных при постоянных интервалах, используя способ укладки, например, для идентификации и обнаружения на полученных изображениях объекта, отличного от космических обломков, такого как искусственный спутник, движущийся по орбите вокруг Земли, или окрашенные микробы.
Дополнительно, предшествующие описания были представлены для варианта осуществления, ссылающегося на способ укладки, который должен выполняться на движущемся объекте, объекте наблюдения, при равномерном прямолинейном движении в предполагаемом направлении движения и на предполагаемую величину перемещения, Однако, настоящее изобретение применимо также к способу укладки, который должен выполняться на движущемся объекте, объекте наблюдения, при равномерно ускоренном (параболическом) движении на предполагаемую величину перемещения, которое увеличивается или уменьшается во времени на постоянное значение.
В варианте осуществления среднее значение, вычисленное на этапе вычисления "среднего значения для ограниченного количества пикселей", является средним значением пиксельных значений в одних и тех же положениях пикселей на изображениях, исключая пиксельное значение, соответствующее светоизлучающему элементу высокой яркости, яркость которого (пиксельное значение) гораздо выше, чем яркость (пиксельное значение) движущегося объекта, объекта наблюдения, на изображениях. По этой причине среднее значение, вычисленное на этапе вычисления "среднего значения для ограниченного количества пикселей", является средним пиксельным значением, которое меньше отражает яркость (пиксельное значение) светоизлучающего элемента высокой яркости (шумовая составляющая), такого как звезда или космический луч в астрономическом небе, полученную в пикселях, чем среднее значение, оцененное простым усреднением пиксельных значений в тех же самых положениях пикселей на изображениях. Другими словами, среднее пиксельное значение, вычисленное на этапе вычисления "среднее значение для ограниченного количества пикселей", ближе к яркости (пиксельному значению) движущегося объекта, объекта наблюдения, чем среднее пиксельное значение, полученное простым усреднением пиксельных значений в тех же самых положениях пикселей на изображениях.
Кроме того, чтобы вычислить среднее пиксельное значение, процессор выполняет либо исполнение по предположению для "выполнения операции сложения с целью вычисления среднего значения", либо исполнение по предположению "невыполнения операции сложения с целью вычисления среднего значения" для пиксельных значений в одних и тех же положениях пикселей на изображениях. Пока доля существования светоизлучающего элемента высокой яркости в каждом изображении не является настолько высокой, чтобы многие из пикселей в изображении отображали светоизлучающий элемент высокой яркости, исполнение по предположению, которое должно выполняться процессором, является исполнением по предположению "выполнения операции сложения с целью вычисления среднего значения" с вероятностью, достаточно более высокой, чем 50%, и успешно выполняется с вероятностью, достаточно более высокой, чем 50%. Поэтому влияние на увеличение объема рабочих процессов в результате отказа при исполнении по предположению является малым.
Соответственно, когда движущийся объект обнаруживается, используя способ укладки, использование среднего пиксельного значения, вычисленного на этапе вычисления среднего значения для ограниченного количества пикселей, в качестве значения оценки для обнаружения движущегося объекта позволяет точно обнаруживать пиксель, получающий движущийся объект, объект наблюдения, или его возможного кандидата при меньшем объеме рабочих процессов, чем это требуется, когда в качестве значения оценки для движущегося объекта используется медианное значение, оцениваемое по пиксельным значениям в одних и тех же положениях пикселей на изображениях.
То, какое пороговое значение должно быть установлено для отличия движущегося объекта, объекта наблюдения, от светоизлучающего элемента высокой яркости, является очень важным параметром для среднего значения, вычисленного на этапе вычисления среднего значения для ограниченного количества пикселей, чтобы меньше отражать яркость (пиксельное значение) светоизлучающего элемента высокой яркости, яркость которого (пиксельное значение) значительно отличается от яркости движущегося объекта, являющегося наблюдаемым объектом.
Поэтому пороговое значение устанавливается, основываясь на среднем значении всех пиксельных значений в одних и тех же положениях пикселей на наложенных изображениях (умножая среднее значение всех пиксельных значений на заданное число). Использование порогового значения в качестве критерия для яркости (пиксельного значения) движущегося объекта, являющегося объектом наблюдения, позволяет точно отличить пиксель, яркость которого (пиксельное значение) значительно отличается от яркости критерия (пиксельного значения), в качестве пикселя, представляющего присутствие светоизлучающего элемента высокой яркости, от пикселя, представляющего присутствие движущегося объекта, объекта наблюдения.
Кроме того, изображения, полученные в постоянных интервалах, делятся на группы, каждая из которых содержит заданное количество последовательных изображений во временной последовательности, причем, если возможные кандидаты на движущийся объект, объект наблюдения, оцененные в изображениях в каждой группе, совпадают друг с другом с точки зрения предполагаемого содержания движения (оцененные параметры движения) и траектории движения, то возможные кандидаты оцениваются как представляющие один и тот же движущийся объект. Таким образом, движущийся объект, являющийся объектом наблюдения, окончательно распознается и обнаруживается.
Поэтому, даже если значение оценки для обнаружения движущегося объекта, полученное из пиксельных значений в одних и тех же положениях пикселей на наложенных изображениях, заменяется средним значением, требующим меньшего количества объема рабочих процессов, чем медианное значение, движущийся объект, являющийся объектом наблюдения, или его возможные кандидаты могут быть точно обнаружены, проверяя, совпадают ли друг с другом кандидаты на движущийся объект, являющийся объектом наблюдения, оцененные в соответствующих группах, с точки зрения предполагаемого содержания движения (оцененных параметров движения) и траектории движения (направление движения).
В варианте осуществления, если движущийся объект, отличающийся от движущегося объекта, являющегося объектом наблюдения, получают на изображениях и если содержание движения (параметры движения) отличающегося движущегося объекта во время постоянных интервалов, известно заранее, пиксельные значения фильтруются на этапе фильтрации и, таким образом, пиксельные значения, относящиеся к отличающемуся движущемуся объекту, аннулируются в изображениях. Использование результирующих изображений позволяет точно обнаруживать движущийся объект, являющийся объектом наблюдения, или его возможных кандидатов.
Дополнительно, даже если звезда, космический луч и т. п. получают в изображениях с более высокой яркостью, чем объект, движущийся по орбите вокруг Земли, который является движущимся объектом, являющимся объектом наблюдения, вариант осуществления позволяет точно обнаруживать объект, движущийся по орбите вокруг Земли, по изображениям, используя меньше рабочих процессов.
В итоге, когда движущийся объект обнаруживается, используя способ укладки, вариант осуществления позволяет точно обнаруживать движущийся объект или его возможных кандидатов при меньшем количестве рабочих процессов, чем которые требуются, когда среднее значение, полученное из пиксельных значений в одних и тех же положениях пикселей на наложенных изображениях, используется в качестве значения оценки для обнаружения движущегося объекта.
Изобретение относится к области обнаружения движущегося объекта. Технический результат – повышение точности обнаружения движущегося объекта или его возможного кандидата. Способ обнаружения движущегося объекта по изображениям, полученным в постоянных временных интервалах, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей, накладывающихся друг на друга на изображениях, последовательно перемещая изображения в соответствии с информацией, соответствующей предполагаемому движению движущегося объекта, содержит: этап вычисления среднего значения для ограниченного количества пикселей, на котором вычисляют среднее значение, используя пиксельные значения, равные или меньшие, чем пороговое значение, чтобы отличить движущийся объект от светоизлучающего элемента с более высокой яркостью; и этап оценки, на котором оценивают пиксели в одних и тех же положениях пикселей на изображениях, для которых средние значения, вычисленные на этапе вычисления среднего значения для ограниченного количества пикселей, равны или больше, чем пороговое значение, в качестве пикселей, захватывающих движущийся объект или его возможные кандидаты. 8 з.п. ф-лы, 11 ил.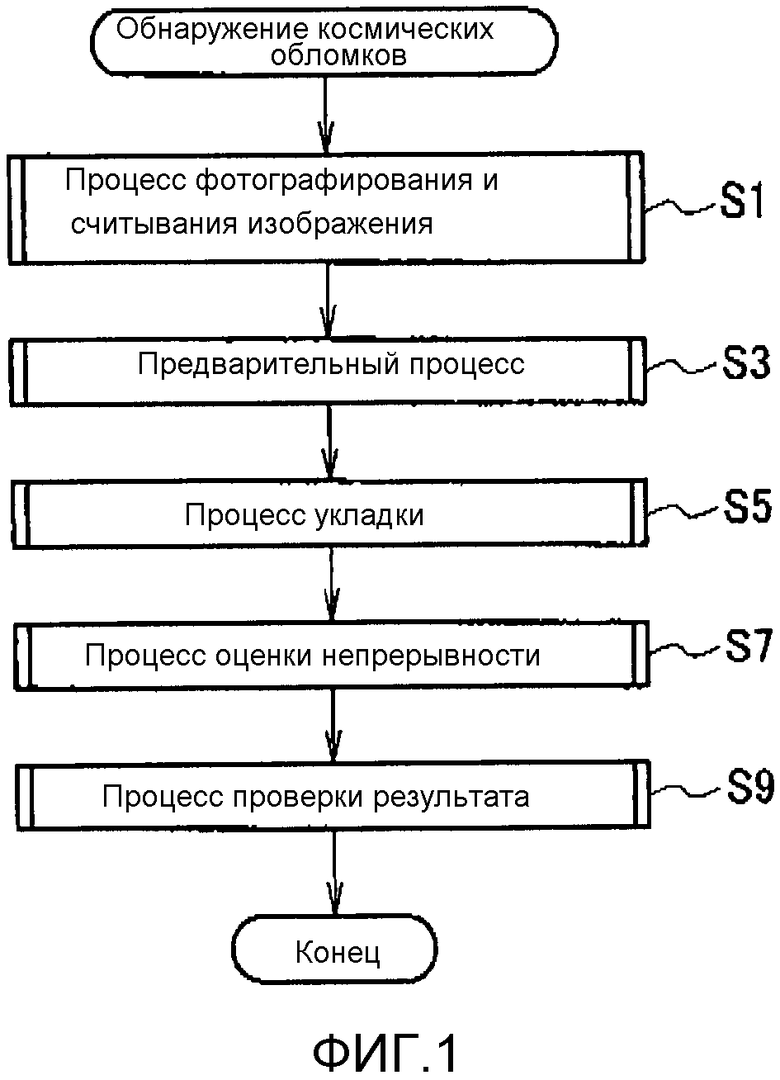
1. Способ обнаружения движущегося объекта, являющегося объектом наблюдения, по изображениям, полученным в постоянных временных интервалах, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей, накладывающихся друг на друга на изображениях, последовательно перемещая изображения в соответствии с информацией, соответствующей предполагаемому движению движущегося объекта, являющегося объектом наблюдения, во время постоянных временных интервалов, содержащий:
этап вычисления среднего значения для ограниченного количества пикселей, на котором вычисляют среднее значение, используя пиксельные значения, равные или меньшие, чем пороговое значение, чтобы отличить движущийся объект, являющийся объектом наблюдения, от светоизлучающего элемента с более высокой яркостью, чем яркость движущегося объекта, причем пиксельные значения являются пиксельными значениями в одних и тех же положениях пикселей на изображениях; и
этап оценки, на котором оценивают пиксели в одних и тех же положениях пикселей на изображениях, для которых средние значения, вычисленные на этапе вычисления среднего значения для ограниченного количества пикселей, равны или больше, чем пороговое значение, в качестве пикселей, захватывающих движущийся объект, являющийся объектом наблюдения, или захватывающих возможные кандидаты движущегося объекта.
2. Способ по п. 1, дополнительно содержащий:
этап вычисления среднего значения для всех пикселей, на котором вычисляют среднее значение для всех пиксельных значений в одних и тех же положениях пикселей на изображениях; и
этап вычисления порогового значения, на котором вычисляют пороговое значение, умножая среднее значение, вычисленное на этапе вычисления среднего значения для всех пикселей, на заданное число.
3. Способ по п. 1, в котором
предполагаемое движение является равномерным линейным движением движущегося объекта, являющегося объектом наблюдения, в предполагаемом направлении его движения и с предполагаемой величиной его движения, и
движущийся объект, являющийся объектом наблюдения, обнаруживается по изображениям, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей, накладывающихся друг на друга на изображениях, последовательно перемещая изображения путем параллельного смещения в предполагаемом направлении движения и с предполагаемой величиной движения движущегося объекта, являющегося объектом наблюдения.
4. Способ по п. 2, в котором
предполагаемое движение является равномерным линейным движением движущегося объекта, являющегося объектом наблюдения, в предполагаемом направлении его движения и с предполагаемой величиной его движения, и
движущийся объект, являющийся объектом наблюдения, обнаруживается по изображениям, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей, накладывающихся друг на друга на изображениях, последовательно перемещая изображения путем параллельного смещения в предполагаемом направлении движения и с предполагаемой величиной движения движущегося объекта, являющегося объектом наблюдения.
5. Способ по п. 1, в котором
предполагаемое движение является равноускоренным движением движущегося объекта, являющегося объектом наблюдения, в предполагаемом направлении его движения и с предполагаемой величиной его движения, которая увеличивается или уменьшается на постоянную величину во времени, и
движущийся объект, являющийся объектом наблюдения, обнаруживается из изображений, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей, накладывающихся друг на друга на изображениях, последовательно перемещая изображения путем параллельного смещения в предполагаемом направлении движения и с предполагаемой величиной движения движущегося объекта, являющегося объектом наблюдения.
6. Способ по п. 2, в котором
предполагаемое движение является равноускоренным движением движущегося объекта, являющегося объектом наблюдения, в предполагаемом направлении его движения и с предполагаемой величиной его движения, которая увеличивается или уменьшается на постоянную величину во времени, и
движущийся объект, являющийся объектом наблюдения, обнаруживается из изображений, основываясь на значении оценки, полученном из пиксельных значений в одних и тех же положениях пикселей, накладывающихся друг на друга на изображениях, последовательно перемещая изображения путем параллельного смещения в предполагаемом направлении движения и с предполагаемой величиной движения движущегося объекта, являющегося объектом наблюдения.
7. Способ по любому из пп. 1-6, дополнительно содержащий:
этап группировки, на котором разделяют изображения на группы, каждая из которых включает в себя заданное количество последовательных изображений во временной последовательности; и
этап обнаружения, на котором обнаруживают движущийся объект, являющийся объектом наблюдения, на изображениях, основываясь на результате оценки, полученном на этапе оценки,
при этом для каждой из групп, на которые были поделены изображения на этапе группировки, выполняют этап вычисления среднего значения для ограниченного количества пикселей и этап оценки, используя заданное количество изображений, принадлежащих группе, и
если возможные кандидаты, совпадающие друг с другом с точки зрения предполагаемого движения и траектории движения, извлекаются из групп, то на этапе обнаружения обнаруживают на изображениях возможные кандидаты как движущийся объект, являющийся объектом наблюдения.
8. Способ по любому из пп. 1-6,
дополнительно содержащий этап фильтрации, на котором: перемещают одно изображение из упомянутых изображений и другое изображение, захваченное перед или после упомянутого одного изображения, в одном из постоянных временных интервалов в соответствии с информацией, соответствующей уже известному движению движущегося объекта, отличающегося от объекта наблюдения, во время постоянных временных интервалов;
вычитают пиксельные значения в одних и тех же положениях пикселей на другом изображении, наложенном на упомянутое одно изображение, из пиксельных значений пикселей на упомянутом одном изображении;
и, таким образом, вычисляют пиксельные значения после фильтрации для пикселей на упомянутом одном изображении,
при этом на этапе вычисления среднего значения для ограниченного количества пикселей вычисляют среднее значение пиксельных значений, равных или меньших порогового значения, причем пиксельные значения являются пиксельными значениями из числа пиксельных значений после фильтрации в тех же самых положениях пикселей на изображениях, полученных на этапе фильтрации.
9. Способ по любому из пп. 1-6,
в котором движущийся объект, являющийся объектом наблюдения, является объектом, движущимся по орбите вокруг Земли, и
изображения являются изображениями, полученными в постоянных временных интервалах во время наблюдения между фиксированными точками.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| TOSHIFUMI YANAGISAWA et al., "Automatic Detection Algorithm for Small Moving Objects", Publ | |||
| Astronomical Society of Japan, p | |||
| ПРИСПОСОБЛЕНИЕ, ЗАТРУДНЯЮЩЕЕ КРАЖУ ЭЛЕКТРИЧЕСКОЙ ЛАМПЫ | 1922 |
|
SU399A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| JP 2002139319 A, 17.05.2002 | |||
| JP 2000025700 A, 25.01.2000 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ ПАРАМЕТРОВ | 2010 |
|
RU2446471C1 |

