Область техники, к которой относится изобретение
[1] Изобретение относится к области машиностроения, а именно, к механизмам - контроллерам, предназначенным для управления оператором мехатронными устройствами. Контроллер может быть применен в следующих областях: роботизация, телеоперация, минимальная инвазивная хирургия, тренажеры, компьютерные игры и другие. Более конкретно, изобретение может относится к области контроля и управления роботизированными хирургическими комплексами для проведения минимально инвазивных хирургических операций и для симуляции таких хирургических операций в виртуальной среде.
Предпосылки создания изобретения
[2] Современные роботы повышают производственную эффективность, прежде всего автоматизируя выполнение технологических процессов. Однако, роботы имеют и иные преимущества, создающие основу инновационных технологий и изделий.
[3] Так, использование в хирургии робота, а корректнее, ассистирующего мехатронного комплекса, позволяет получить на сегодняшний день недоступные врачу функциональные возможности и качество: возможность проникать через малый разрез к труднодоступным областям и оперировать их; точность и заданная скорость перемещения инструмента; отсутствие тремора; жесткость и другое. Все эти действия пока не могут выполняться роботом автоматически и требуют специального контроля и управления оператором-хирургом мехатронного устройства. Такой контроль реализуется специальным пространственным механизмом - контроллером оператора.
[4] С одной стороны, контроллер, в прямом порядке работы, обеспечивает управление и контроль исполнительного механизма, с другой стороны, в обратном порядке работы, он позволяет реализовать тактильное ощущение через виртуальный контакт с исполнительным механизмом. В качестве исполнительного механизма может выступать робот или манипулятор, а в качестве тактильного устройства - контроллер, силы воздействия которого ограничены и соизмеримы с силой рук оператора. Контроллер, управляемый рукой оператора, генерирует один или несколько управляющих сигналов, которые затем используются для управления различными движениями ассистирующего мехатронного комплекса, преобразуя механические движения руки по шести степеням свободы в команды для мехатронного комплекса. Контроллер также предоставляет пользователю информацию с обратной связью по силе, поступающую на вход движения и/или силы, генерируемой пользователем.
[5] Контроллер для дистанционного управления движением роботохирургического комплекса может быть отделен от исполнительного механизма значительным расстоянием (например, контроллер может быть в другой комнате или в совершенно другом здании).
[6] Анализ уже созданных и используемых контроллеров, только в роботохирургии, позволил выявить многочисленные замечания, такие как: большой размер контроллеров, отсутствие обратной связи, большой вес контроллеров, невозможность изменить позу расположения оператора перед контроллером, ограниченная точность оцифровки перемещения руки оператора, ограниченный «клач» и другое.
[7] Заявка US 2019201147 А1 описывает контроллер управления роботизированной системой, используемой для лапароскопической хирургии, в частности, для управления хирургическими инструментами. Контроллер является задающим органом, конструктивно построенным на принципах параллельной структуры и имеющим механизм дельта-робота. Контроллер включает устройство ввода, выполненное в виде рукоятки, способной к поступательным и вращательным перемещениям. Хирургический инструмент позиционируется и перемещается в зависимости от положения и ориентации рукоятки контроллера. Поступательные перемещения рукоятки, реализованные механизмом дельта-робота, обеспечивают три поступательные степени свободы перемещения хирургического устройства, а три вращательные степени свободы хирургического устройства обеспечены за счет возможности вращения рукоятки. Приводное звено дельта-робота имеет тросовую конструкцию передачи и включает в себя по меньшей мере один привод и по меньшей мере один датчик положения, который позволяет измерять угол отклонения дельта-робота относительно соответствующей оси.
[8] В качестве основного недостатка описанного выше контроллера можно выделить особенности приводного механизма, которые не позволяют получить требуемую жесткость и точность конструкции за из-за использования тросовой передачи, так как любому тросу свойственно растяжение, из-за чего появляется люфт в механизме. Это влечет за собой неудовлетворительные последствия, масштабируемые системой управления. Также отсутствует система обратной связи.
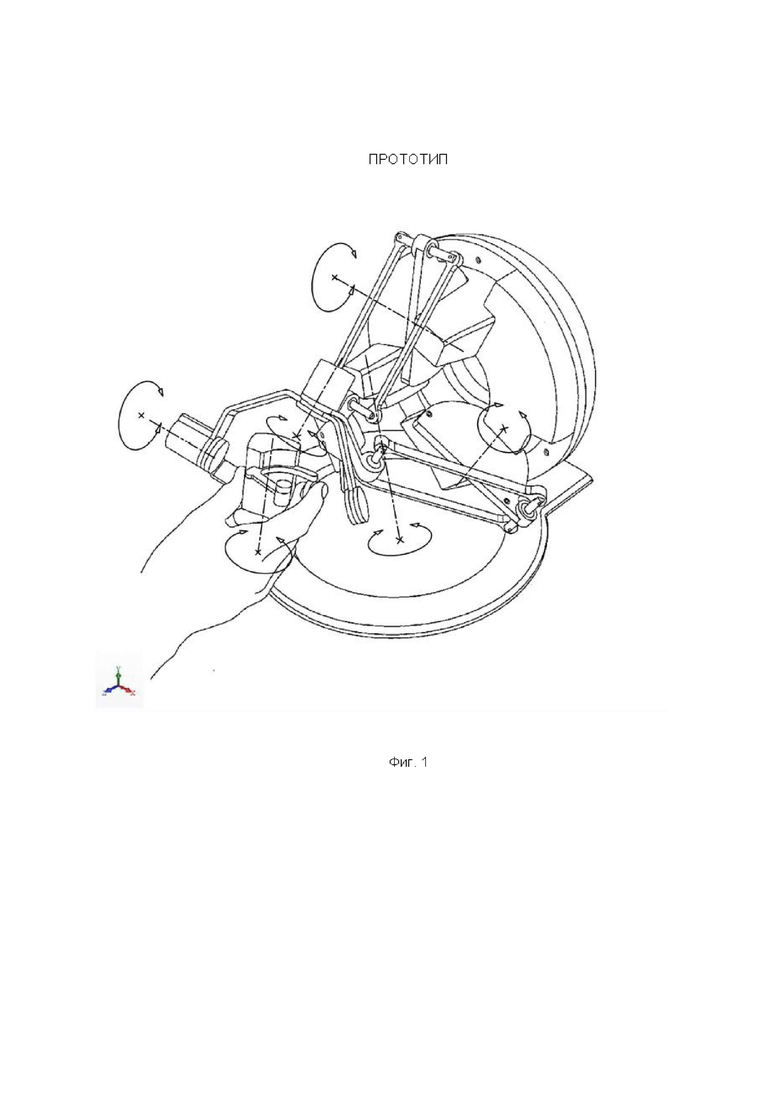
[9] Заявка US 2014192020 A1 описывает контроллер руки для роботизированных хирургических вмешательств, с помощью которого посредством изменения его положения и ориентации осуществляется приведение в движение различных узлов роботохирургического комплекса с целью манипулирования хирургическим инструментом.
[10] Контроллер имеет в составе дельта-робот, контроллер кисти и контроллер запястья. Контроллер имеет шесть степеней свободы и одну степень свободы, обеспечивающую схватывание (фиг. 1). Три из указанных степеней свободы - это линейные степени свободы, обеспеченные по осям X, Y, Z и осуществляемые кинематикой дельта-робота, другие три степени свободы - это три вращательные степени свободы, две из которых отрабатывает контроллер запястья, а оставшуюся степень свободы и угол захвата выполняет контроллер кисти. Контроллер снабжен энкодерами и двигателями для совершения преобразования движения руки оператора в цифровую форму, а также системой измерения тока и напряжения в двигателях для косвенного определения крутящего момента или силы.
[11] Дельта-робот в конструкции контроллера, описываемого в US 2014192020 A1, приводится в действие тросовой системой, которая не гарантирует жесткость конструкции, так как со временем неизбежно приводит к люфту механизма. А от жесткости конструкции зависит точность, кинематика и динамика контроллера. В то же время масштабируемость системы ограничена максимальным моментом, передаваемым тросовым приводом. Используемая система измерения тока и напряжения в двигателе обладает малыми точностью и быстродействием.
[12] Известный уровень техники не позволяет в одной конструкции контроллера руки решить следующую совокупность проблем, что понижает эффективность его работы:
a. обеспечение жесткости приводного механизма, что гарантирует точность измерение сигналов о положении руки в пространстве;
b. точность приводного механизма, что обеспечивает требуемую точность перемещения по степеням свободы;
c. измерение тока и напряжения на приводах механизма контроллера, что дает достаточно точные результаты для определения косвенных значений крутящего момента или силы.
[13] Таким образом, существует потребность в создании универсального контроллера, который бы имел возможность обеспечить минимальную нагрузку веса на руку во время работы и имел возможность в обратном порядке преобразовывать цифровой управляющий сигнал в механическое перемещение-поворот элементов контроллера, передавая его на руки и пальцы хирурга. Конструкция данного контроллера должна обеспечить по меньшей мере 6 степеней свободы движения, из них три степени — это поступательные перемещения и три вращательные степени свободы. Также обеспечивается одна степень свободы для обеспечения захвата. Все движения, совершаемые контроллером, должны иметь интуитивно понятное взаимодействие с хирургическим инструментом для реализации их в хирургических процедурах.
[14] Именно решению перечисленных проблем посвящена данная заявка.
Суть изобретения
[15] Технической задачей настоящего изобретения является создание универсального цифрового контроллера, повышающего эффективность управления мехатронными устройствами, в том числе роботохирургическими комплексами. При этом под эффективностью управления в данном случае понимают сокращение нагрузки на руки оператора-хирурга, повышение точности определения положения и диапазона перемещения рук, мобильность.
[16] Дополнительной технической задачей является создание контроллера, который позволяет осуществлять взаимодействие человека посредством руки с мехатронным комплексом, прежде всего, с роботом, как задавая ему команду, так и получая обратные реакции в ответ.
[17] При этом разрабатываемый контроллер должен быть также универсальным при использовании его с разными мехатронными комплексами.
[18] С целью решения поставленных задач разработанный контроллер оператора для управления роботохирургическим комплексом включает неподвижную опорную платформу, подвижную платформу, расположенную и передвигающуюся параллельно неподвижной опорной платформе, соединенную с ней посредством исполнительного механизма параллельной структуры, приводной механизм исполнительного механизма и тензоплатформу, установленную между подвижной платформой и неподвижной опорной платформой и соединенную с последней посредством цилиндрических направляющих. Каждое звено приводного механизма выполнено в виде кривошипно-шатунного механизма, приводимого в движение сервоприводом с шарико-винтовой передачей. На тензоплатформе расположены сопряженные с каждой шарико-винтовой передачей тензодатчики. При этом исполнительный механизм параллельной структуры представляет собой три кинематические цепи, связанные одними своими концами с соответствующими подшипниковыми узлами, закрепленными на неподвижной опорной платформе, а другими концами - с подвижной платформой. При этом к подвижной платформе прикреплена управляющая ручка с возможностью ее охвата кистью руки оператора и сконфигурированная для контроля и преобразования в цифровой сигнал движения руки оператора по меньше мере по трем вращательным степеням свободы и силового воздействия на тензоплатформу по трем линейным степеням свободы. При этом формирующийся на тензодатчиках сигнал передаётся на цифровой блок управления контроллером, который рассчитывает и передает на сервопривод соответствующего звена приводного механизма упомянутого исполнительного механизма команды компенсации веса и/или иные компенсационные перемещения по планируемой траектории, рассчитанной на основе полученных данных.
[19] В некоторых вариантах осуществления изобретения исполнительный механизм параллельной структуры представляет собой дельта-робот.
[20] В некоторых вариантах осуществления изобретения сервопривод выполнен со встроенным электромагнитным тормозом и датчиком положения углов.
[21] При этом управляющая ручка контроллера включает контроллер запястья, сконфигурированного для контроля и преобразования в цифровой сигнал движения запястья оператора по двум вращательным степеням свободы в ортогональных плоскостях, и контроллер кисти, обеспечивающий непосредственный контакт со всей поверхностью кисти оператора во время управления контроллером.
[22] Контроллер кисти включает рукоятку для контроля и преобразования в цифровой сигнал движения кисти оператора по одной вращательной степени свободы и пальцевые схваты для контроля и преобразования в цифровой сигнал положения пальцев руки оператора относительно рукоятки.
[23] Контроллер запястья включает блок механизма поворота и блок подвижной консоли.
[24] Кроме того, управляющая ручка включает блок управления контроллером запястьем, блок управления контроллером кисти, датчик поворота блока механизма поворота, датчик поворота блока подвижной консоли, приводной элемент блока механизма поворота, приводной элемент блока подвижной консоли, датчик поворота пальцевых схватов, датчик поворота рукоятки, приводной элемент по меньшей мере одного пальцевого схвата, приводной элемент рукоятки.
[25] Кроме того, цифровой блок управления сконфигурирован для получения сигналов о текущем состоянии усилий со стороны оператора от тензоплатформы и/или сигналов от контроллера кисти о повороте рукоятки и/или по меньшей мере одного пальцевого схвата и/или сигналов от контроллера запястья о повороте блока механизма поворота и/или блока подвижной консоли и передачи полученных сигналов на внешнюю систему управления роботохирургическим комплексом. Кроме того, цифровой блок управления сконфигурирован для получения управляющих сигналов от внешней системы управления роботохирургическим комплексом и передачи их на приводной элемент блока механизма поворота и/или приводной элемент блока подвижной консоли и/или приводной элемент рукоятки и/или приводной элемент по меньшей мере одного пальцевого схвата.
[26] Поставленные задачи достигаются тем, что используется усовершенствованная конструкция контроллера, а точнее приводного механизма дельта робота, которая позволит увеличить жесткость и точность конструкции, обеспечит высокую информативность приложенных сил со стороны оператора. Приводное звено в виде кривошипно-шатунного механизма, приводимого в движение шарико-винтовой передачей, обладает высоким передаточным числом. Такая схема обеспечивает большую нагрузочную способность и высокий момент для беспрепятственной масштабируемости системы.
[27] Применение в качестве измерительного устройства сил тензодатчика или модуля из таких датчиков дает возможность получения цифровой информации в трехмерном пространстве о прикладываемой силе, векторе приложения силы и ускорении приложения силы, во время управления мехатронным комплексом.
[28] Масштабируемость системы позволяет изменять амплитуду совершаемых на контроллере управления движения рук и преобразовать их в команды точной манипуляции инструментов в теле пациента. Оператор, управляя контроллером, тратит меньше энергии и испытывает меньшее напряжение, что позволяет ему проводить более длительные манипуляции. При этом инструменты повторяют движение его рук.
[29] Увеличение масштабируемости и повышение точности контроллера достигаются за счет использования жестких и точных кинематических схем, которые обеспечивают прецизионные движения как контроллера, так и хирургического инструмента.
[30] Объекты и преимущества настоящего изобретения станут более очевидны специалистам после рассмотрения следующего подробного описания и чертежей.
Краткое описание чертежей
[31] Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения.
[32] Фиг. 1 иллюстрирует общий вид прототипа контроллера управления.
[33] Фиг. 2 иллюстрирует общий вид роботохирургического комплекса.
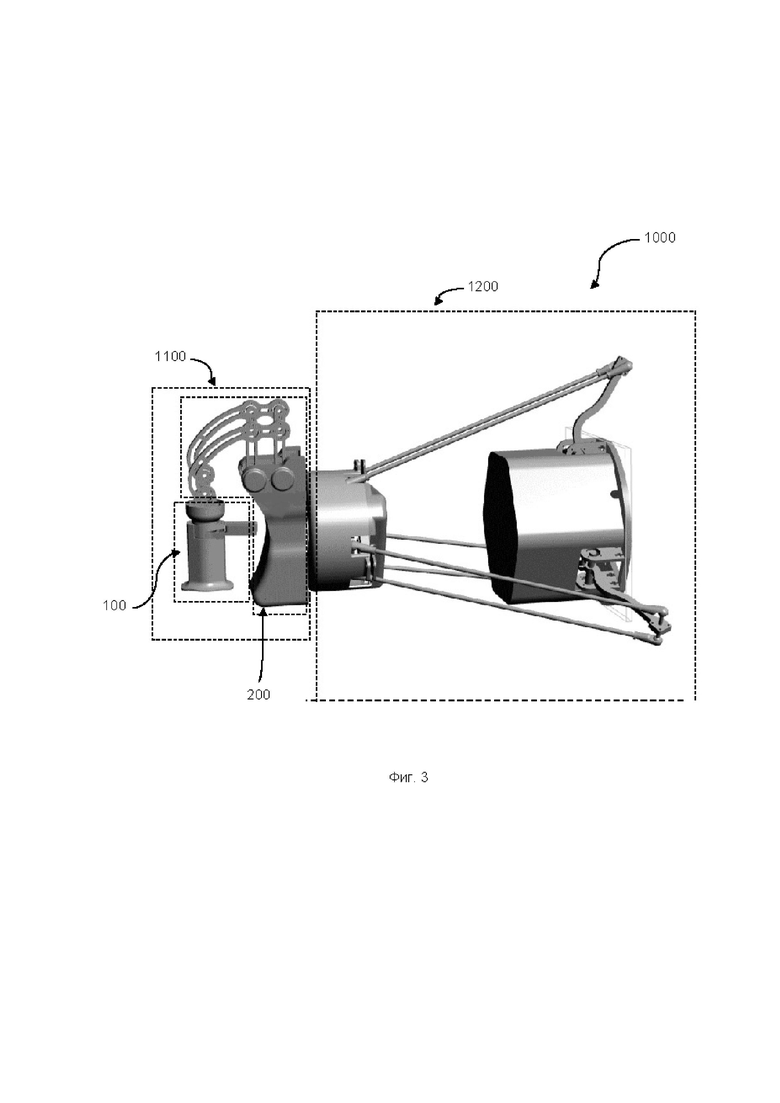
[34] Фиг. 3 иллюстрирует перспективный вид контроллера по настоящему изобретению, предназначенного для управления оператором мехатронными устройствами.
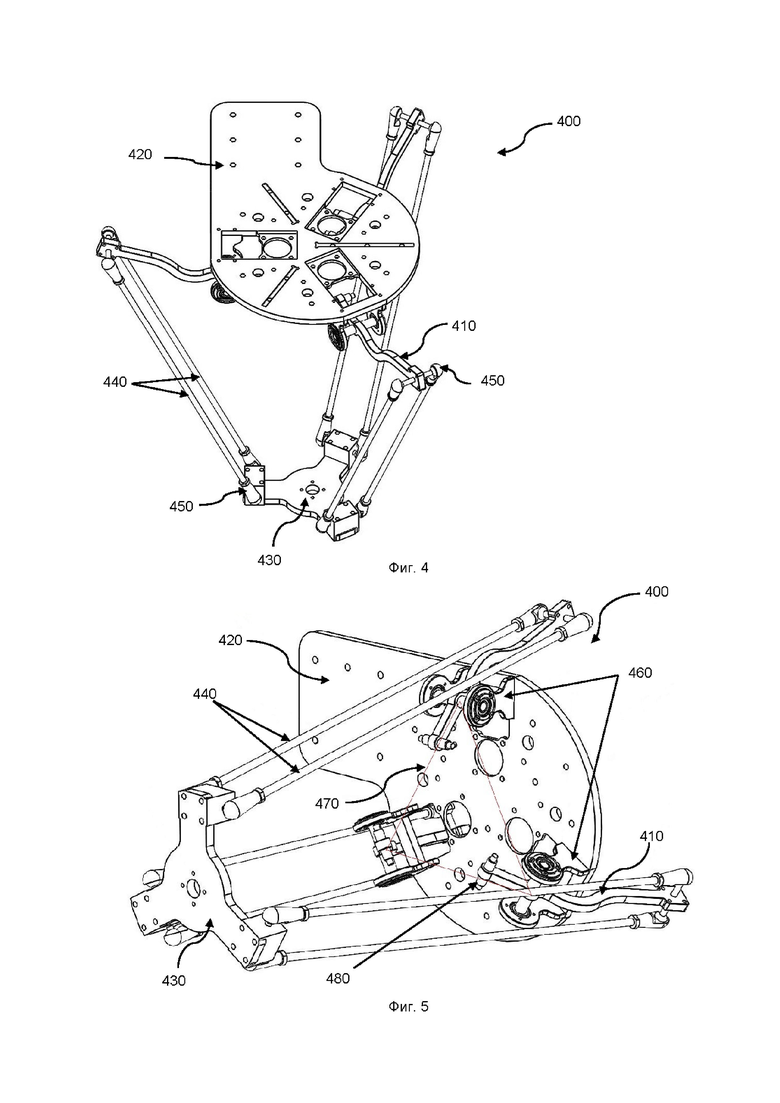
[35] Фиг. 4 иллюстрирует разработанную модель блока позиционирования контроллера руки, выполненного в виде дельта-робота в предпочтительном варианте осуществления изобретения.
[36] Фиг. 5 иллюстрирует исходное положение дельта робота.
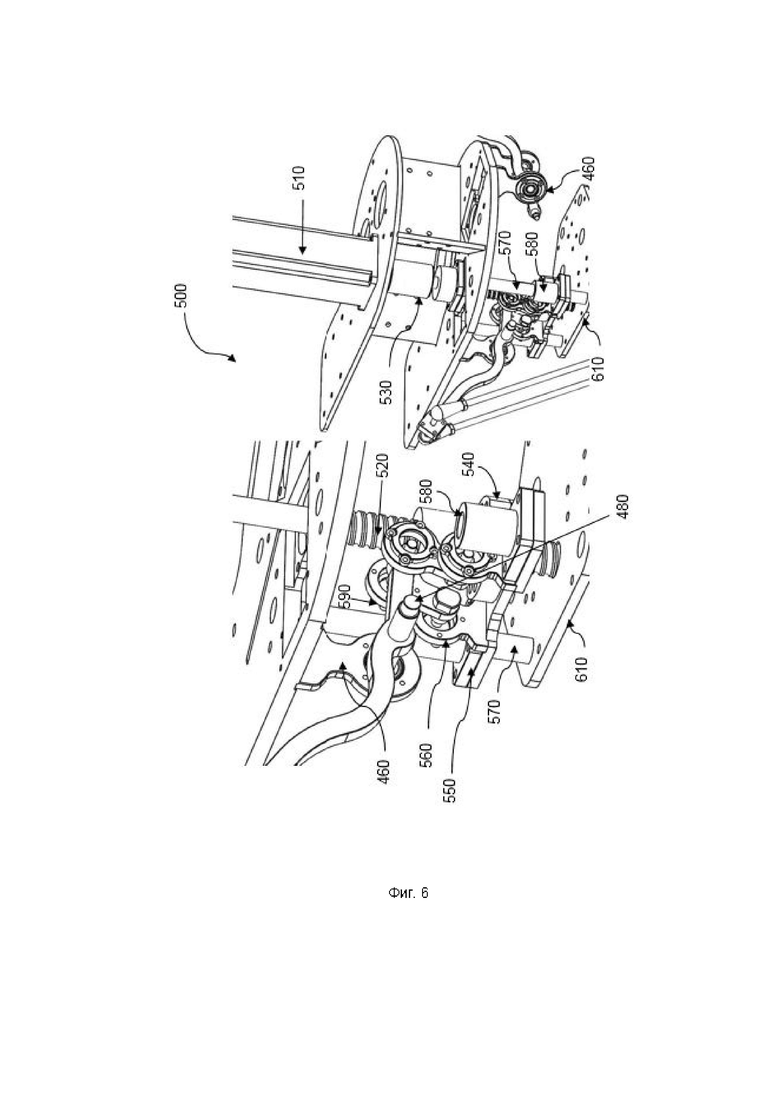
[37] Фиг. 6 иллюстрирует предпочтительный вариант осуществления приводного механизма, входящего в состав контроллера руки.
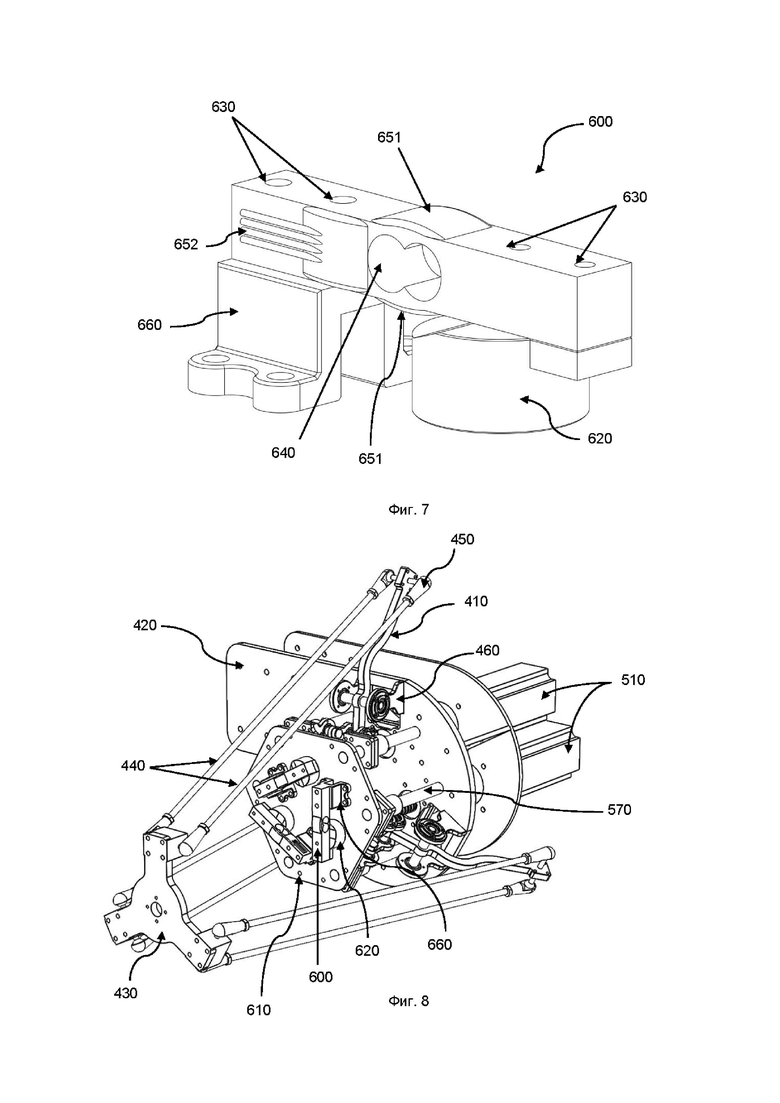
[38] Фиг. 7 иллюстрирует реализацию тензодатчика в одном из вариантов осуществления настоящего изобретения.
[39] Фиг. 8 иллюстрирует дельта-робот в сборе согласно настоящему изобретению.
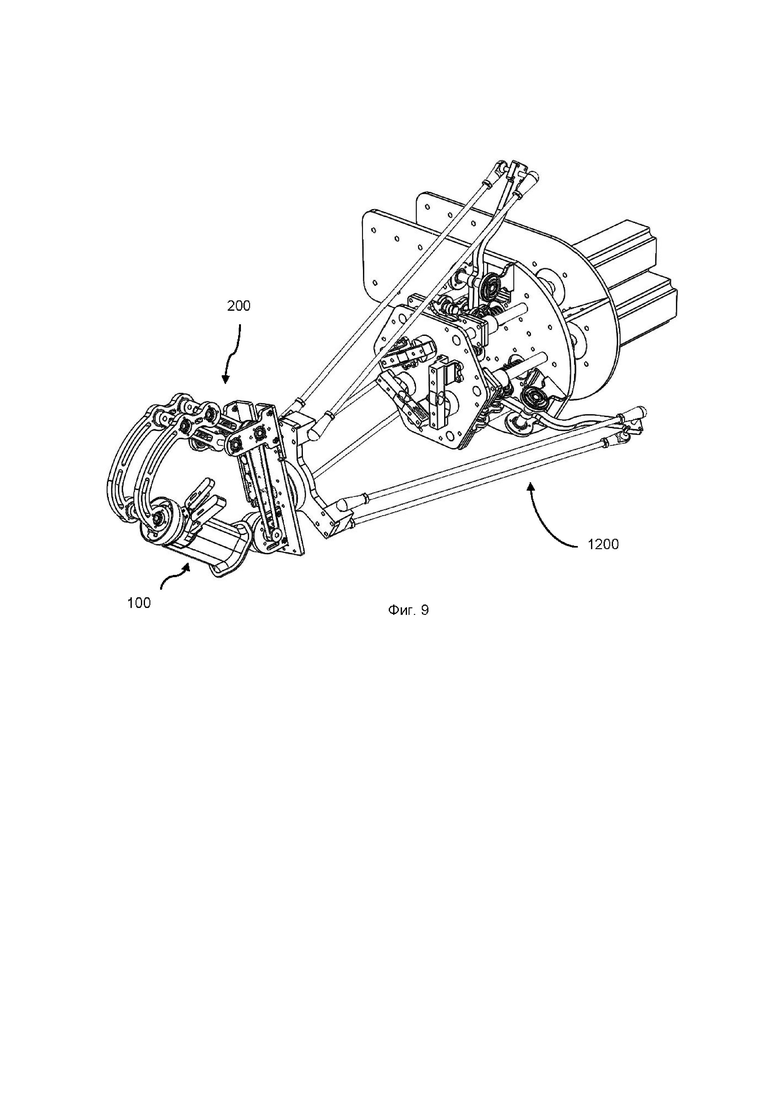
[40] Фиг. 9 представляет собой конструкцию контроллера оператора, состоящую из контроллера руки, контроллера запястья и контроллера кисти.
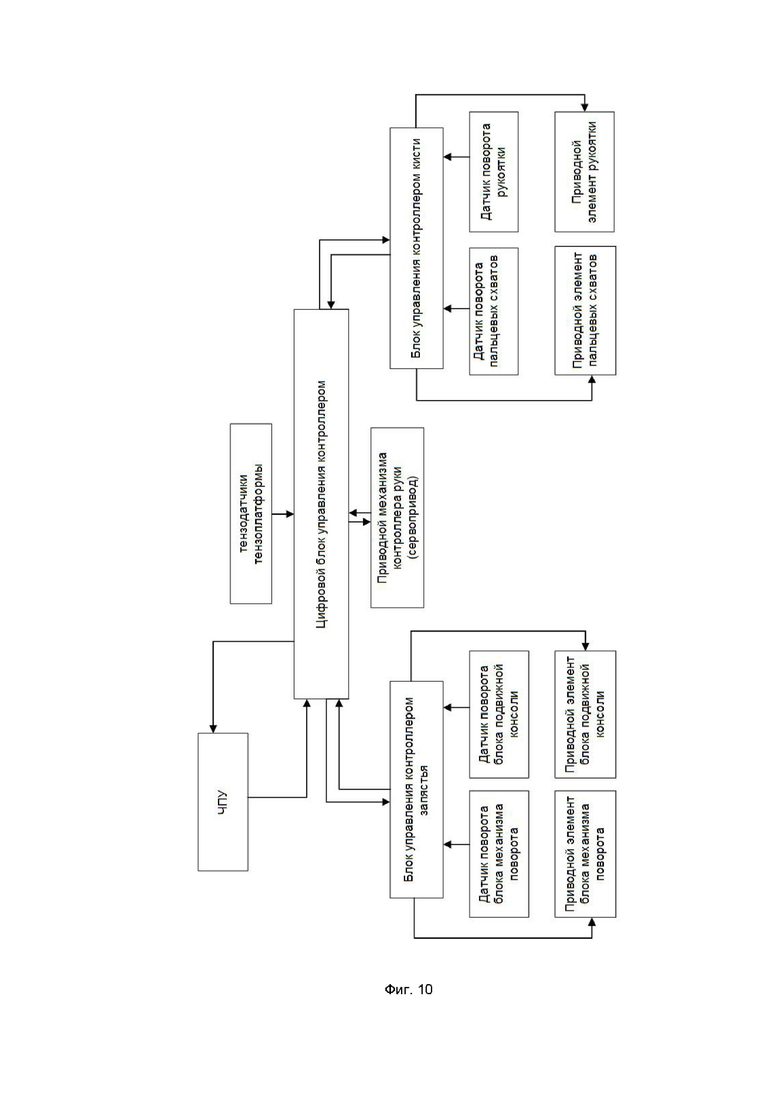
[41] Фиг. 10 схематично отражает схема управления контроллером.
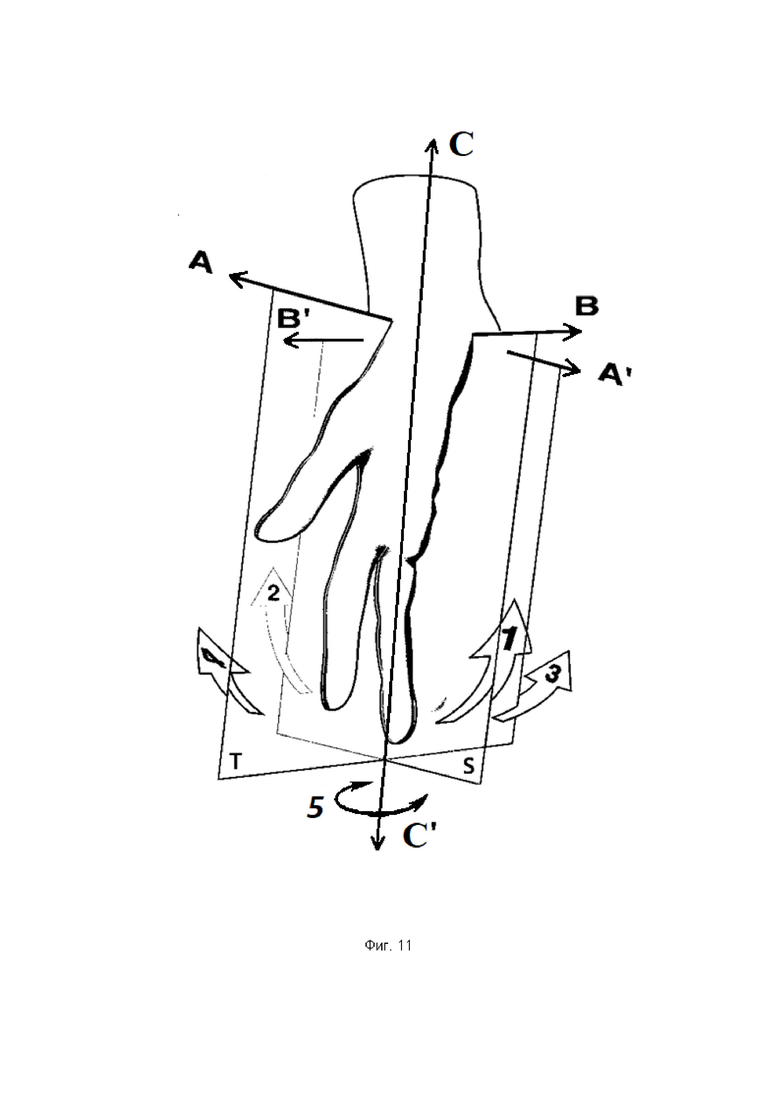
[42] Фиг. 11 схематически отражает плоскости, в которых осуществляются движения кисти оператора в лучезапястном суставе.
Термины и определения
[43] Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
[44] В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е., в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
[45] В настоящих материалах заявки под терминами «роботизированный технологический комплекс», «роботизированная система», «роботизированный комплекс», «роботохирургический комплекс», «роботохирургическая система» понимают сложные системы или комплексы в хирургии с использованием ассистирующего робота во время операции. «Робот-ассистивные системы» или «робот-ассистированные хирургические системы» - это роботизированные системы, предназначенные для проведения медицинских операций. Это не автономные устройства. Робот-ассистивными системами при проведении операции управляют хирурги.
[46] В настоящих материалах заявки под термином «мехатронный комплекс» или «мехатронная система» понимают комплекс или систему с компьютерным управлением движения, которые базируются на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
[47] В настоящей заявке под термином «оператор» понимают производящего операции врача хирурга. Признаки «оператор» и «хирург» в настоящем описании изобретения являются синонимами.
[48] В настоящей заявке используются следующие термины для описания движений кисти в лучезапястном суставе (фиг. 11). Движения кисти происходят вокруг двух осей, когда кисть находится в анатомическом положении, т.е., в положении полной супинации. Поперечная ось АА′ лежит во фронтальной плоскости Т и контролирует движения сгибания и разгибания, осуществляемые в сагиттальной плоскости:
- отклонение (девиация) кисти или флексия (стрелка 1) - передняя (ладонная) поверхность кисти движется к передней поверхности предплечья,
- отклонение (девиация) кисти или экстензия (стрелка 2) - задняя (тыльная) поверхность кисти движется к задней поверхности предплечья.
[49] Переднезадняя ось ВВ′ лежит в сагиттальной плоскости S и контролирует движения приведения и отведения, происходящие во фронтальной плоскости:
- приведение или локтевая девиация (стрелка 3) - перемещение кисти по направлению к продольной оси тела, ее внутренний (ульнарный) край образует тупой угол с внутренним краем предплечья;
- отведение или лучевая девиация (стрелка 4) - перемещение кисти от продольной оси тела, ее наружный (лучевой) край образует тупой угол с наружным краем предплечья.
[50] Продольная ось СС′ лежит на пересечении плоскостей S и Т и контролирует движения вращения кисти:
- поворот лучевой кости (стрелка 5) вместе с кистью вокруг локтевой кости относительно продольной оси.
[51] Под термином «универсальный» в части его использования относительно контроллера в данном документе поднимают контроллер, который «оцифровывает» руку оператора и позволяет не тренировать руку оператора на каждый новый инструмент без последующих изменений конструкции контроллера. Освоив контроллер один раз, оператор использует его на протяжении длительного периода своей практики, благодаря свойству контроллера интегрироваться ("представлять" руку хирурга) в различных мехатронных устройствах.
[52] Под термином «абсолютное положение» в данной документе понимают координату, определенную относительно неподвижного элемента конструкции.
[53] Под термином «датчик поворота» в данном документе понимают устройство, предназначенное для преобразования угла поворота вращающегося объекта в электрические или аналоговые сигналы, позволяющие определить угол его поворота. Для определения значения угла поворота того или иного элемента в принципе подходят все виды угловых датчиков. Однако, в большинстве используемых датчиков требуется, прежде всего, постоянная регистрация и сохранение текущих данных о повороте элемента. Датчики поворота могут быть использованы на основе инкрементальных и абсолютных энкодеров. Датчики имеют цифровые выходные сигналы Linedriver (TTL, RS422), Push-Pull (HTL), SSI, CAN, Profibus, Profinet и другие. Также могут быть использованы датчики на основе аналоговых датчиков угла поворота и/или магнитных датчиков угла поворота.
[54] Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
[55] Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Подробное описание изобретения
[56] Описание примерных вариантов осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей, и не предназначено для ограничения объема раскрываемого изобретения.
[57] Система роботохирургического комплекса включает в себя три основных узла. Первый узлом являются контроллеры, служащие задающим устройством и с которыми непосредственно взаимодействует хирург. Вторым исполнительным узлом является манипуляторы, на которых установлены медицинские инструменты. В зависимости от выполняемой процедуры имеется возможность смены медицинского инструмента на необходимый для данной стадии операции. Третьим узлом роботохирургического комплекса является вычислительный блок, с помощью которого осуществляются все взаимодействия системы.
[58] Роботохирургический комплекс может быть использован при проведении различных хирургических вмешательств, в том числе в урологии, гинекологии абдоминальной, нейро- и кардиохирургии. Пример роботохирургического комплекса приведен на фиг. 2.
[59] Роботохирургический комплекс 300 имеет в составе по меньшей мере один манипулятор 310 с прикрепленным к нему хирургическим инструментом 320, электронный блок управления манипулятором 330 и интерфейс оператора 340, который получает команды от хирурга, преобразует их в движение хирургического инструмента 320 внутри тела пациента во время проведения хирургической операции и/или обеспечивает все управляющие команды от хирурга комплектующим роботохирургического комплекса. Главным источником команд является рука хирурга. Рука управляет контроллером хирурга, входящего в состав интерфейса хирурга.
[60] Контроллер хирурга преобразует механические движения руки по шести степеням свободы в команды для роботохирургического комплекса 300. Контролер формирует команду на перемещение манипулятора с хирургическим инструментом в пространстве. Дополнительно контроллер выполняет управление поворотом и/или отклонением хирургического инструмента относительно одной оси и открытием/закрытием бранша на хирургическом инструменте.
[61] Обычно манипуляторы с хирургическим инструментом смонтированы на хирургическом столе, на котором лежит пациент при проведении операции. В некоторых вариантах осуществления манипуляторы могут быть помещены на тележку или какое-то другое приспособление, в котором манипуляторы будут находиться проксимальнее уровня пациента. Следует понимать, что роботохирургический комплекс 300 может иметь любое число манипуляторов, так, например, один или более манипуляторов. Манипуляторы могут иметь любую конфигурацию.
[62] Каждый манипулятор 310 имеет корпус и узел манипулятора, к которому съемно присоединен хирургический инструмент 320, перемещением и ориентацией которого имеет возможность манипулировать хирург с помощью контроллера, который оцифровывает руку хирурга.
[63] Поскольку хирург может управлять движением и ориентацией хирургических инструментов, не удерживая инструмент непосредственно в руке, то хирург может использовать комплекс как в сидячем, так и стоячем положении. В качестве приспособления для сидячего положения комплекс может быть обеспечен креслом.
[64] Таким образом, контроллер управления, с которым взаимодействует рука хирурга, является важным звеном системы роботохирургического комплекса. Контроллер должен максимально точно и достаточно быстро считывать все совершаемые перемещения руки, запястья и кисти, не доставляя при этом дискомфорт хирургу. Так как проводимые хирургические вмешательства длятся часами, то в течение всего этого времени эргономика данного устройства должна быть максимально комфортной.
[65] Масштабируемость системы позволяет изменять амплитуду движения контроллера, которым управляет оператор, и преобразовывать движения контроллера, увеличивая/уменьшая их в процессе преобразования, в точные манипуляции медицинских инструментов в теле пациента. Оператор, управляя контроллером, тратит меньше энергии, что позволяет ему проводить более длительные манипуляции, при этом медицинские инструменты повторяют движения его рук. Чтобы увеличить масштабируемость и повысить точность данного устройства, необходимо использовать жесткие и точные кинематические схемы, которые обеспечат прецизионные движения хирургического инструмента.
[66] Предлагаемое изобретение (контроллер) относится к классу механизмов, обеспечивающих преобразование в электронный цифровой сигнал команд, которые человек задает движением руки. Контроллер в целом состоит из управляющей ручки, блока-платформы позиционирования и цифрового блока управления.
[67] Общий вид контроллера изображен на фиг. 3. Контроллер цифровой 1000 в целом состоит из управляющей ручки 1100, блока-платформы позиционирования 1200 и цифрового блока управления (не показан на чертеже).
[68] Указанный контроллер 1000 имеет контур прямой связи для того, чтобы задавать команды от оператора через движение его руки мехатронному устройству, и контур обратной связи для передачи в обратном порядке на руку оператора ответных команд-реакций от мехатронного устройства. Контур обратной связи контроллера 1000 предназначен для передачи на руку тактильных ощущений.
[69] Контакт контроллера 1000 с рукой реализуется на управляющей ручке 1100. Управляющая ручка 1100 в целом состоит из контроллера кисти 100 и контроллеру запястья 200, каждый из которых обеспечивает две вращательные степени свободы контроллера 1000.
[70] Блок - платформа позиционирования контроллера 1200 представляет собой контроллер руки, обеспечивающий три поступательные степени свободы контроллера 1000 путем возвратно-поступательного движения механизма контроллера 1000 по трем взаимно ортогональным осям. При этом на контроллере руки 1200 закреплен контроллер запястья 200, входящий в состав управляющий ручки контроллера 1100. Таким образом, контроллер оператора 1000 контролирует и преобразует в цифровой сигнал движения руки по шести степеням свободы.
[71] Контроллер руки (или блок-платформа позиционирования) состоит из по меньшей мере двух платформ: неподвижной опорной и подвижной, - и блока позиционирования. К неподвижной опорной платформе прикреплена подвижная платформа посредством механизма компенсации веса, включающего блок позиционирования, выполненный на принципах параллельной структуры, предпочтительно, на основе механизма типа «дельта» (дельта-робота или дельтапода), и приводного механизма, который приводит в движение дельта-робот, обеспечивая при этом минимальный люфт.
[72] Механизм параллельной структуры может быть использован любой. В предпочтительном варианте осуществления контроллера согласно заявляемому изобретению блок позиционирования представляет собой замкнутую кинематическую цепь, состоящую из штанг постоянной длины, расположенных попарно параллельно и соединенных одними концами с соответствующими приводами, закрепленными на неподвижной опорной платформе, а другими концами - с подвижной платформой. Дельта-механизмы обладают повышенной маневренностью и расширенной границей рабочей зоны.
[73] Более того, контроллер на основе механизма параллельной структуры в сравнении с контроллерами последовательной структуры и иными контроллерами имеет значительно меньший вес и размер, при одновременно большей точности, жесткости и мощности.
[74] На фиг. 4 изображен конкретный вариант исполнения дельта-робота 400 согласно одному из вариантов настоящего изобретения. Дельта-робот представляет собой вид параллельного робота, который состоит из трех рычагов 410, расположенных под углом 120° относительно друг друга и прикрепленных к опорной платформе 420.
[75] Преимуществом конструкции дельта-робота 400 является использование параллелограммов 440, содержащих штанги постоянной длины, расположенные попарно параллельно и соединенные между собой с помощью карданных шарниров 450. Параллелограммы 440 одним концом соединены за соответствующие рычаги 410, а вторым концом связаны с подвижной платформой 430. Такая конструкция позволяет сохранять пространственную ориентацию механизмов робота. При этом подвижная платформа 430 всегда расположена параллельно опорной платформе 420.
[76] Соединение рычагов 410 с опорной платформой 420 производится через верхние подшипниковые узлы 460 (фиг. 5), чтобы обеспечить необходимые углы для исходного состояния дельта-робота. Верхние подшипниковые узлы 460 закреплены на опорной платформе 420. Установленные на верхние подшипниковые узлы 460 рычаги 410 на центрах соединения образуют равносторонний треугольник 470, углы которого влияют на размер полезной рабочей области дельта-робота. За перемещения по оси Z отвечает рычаги 410. Увеличивая длину рычага 410, увеличивается ход по оси Z. Размеры при перемещении по осям X и Y задаются параллелограммами 440.
[77] Приводной механизм контроллера, который приводит в движение блок позиционирования контроллера, в частности, рычаги 410, может выполнен в виде любого известного механизма, обеспечивающего сокращение потерь точности из-за люфтов при работе механизма. В предпочтительном варианте осуществления контроллера согласно заявляемому изобретению приводной механизм может быть выполнен как кривошипно-шатунный механизм. Он приводится в движение с помощью шарико-винтовой передачи, исполняющей вращательные движения за счет сервопривода с встроенным электромагнитным тормозом и датчиком положения углов. Сервопривод - электромеханическое устройство, которое осуществляет динамические движения с постоянным контролем угла поворота вала, а также предоставляет возможность управления угловыми скоростями в различных исполнительных устройствах. В зависимости от получаемого на управляемый вход сервопривода значения управляющего параметра в результате сравнения данного параметра со значением датчика положения углов (энкодера) или с математической моделью (алгоритм вычислений вшит в памяти частотного преобразователя) изменяются параметры работы электропривода и осуществляется некоторое корректирующее действие для сервомотора (или серия действий), например: поворот вала, ускорение или замедление, так, чтобы значение с датчика положения стало как можно ближе к значению внешнего управляющего параметра. Используемый тип сервопривода может быть любым. В некоторых вариантах осуществления изобретения используется интегрированный сервопривод.
[78] В некоторых вариантах осуществления контроллера в качестве приводного механизма может быть использован любой известный безлюфтовой редуктор с нулевым механическим люфтом, например, безлюфтовый прецизионный редуктор, предпочтительно волнового типа или планетарный редуктор с угловым люфтом менее 6’.
[79] Приводной механизм воздействует на опору 480, противоположную от закрепления штанг параллелограмма 440 часть рычага 410 (фиг.5).
[80] Конкретный вариант исполнения приводного механизма контроллера согласно настоящему изобретению приведен на фиг.6.
[81] Приводной механизм 500 включает сервопривод 510 с шарико-винтовой передачей и кривошипно-шатунным механизмом. В зависимости от шага шарико-винтовой передачи и радиуса кривошипа можно увеличить или уменьшить передаточное число приводного механизма.
[82] Передача момента осуществляется следующим образом. Сервопривод 510 через соединительную муфту 530 соединяется с валом 520 шарико-винтовой передачи и приводит его во вращательные перемещения. При этом гайка 540 шарико-винтовой передачи совершает поступательные движения. Гайка 540 крепится к направляющей платформе 550, которая установлена на линейных подшипниках 580, которые ходят по цилиндрическим направляющим 570. Направляющая платформа 550 имеет нижние подшипниковые узлы 560, на которых базируется элемент криво-шатунного механизма (шатун) 590. Таким образом, кривошипный механизм переводит поступательные движения направляющей платформы 550 во вращательные движения рычага 410.
[83] У кривошипно-шатунного механизма есть отрицательные положения углов, при которых передача поступательно-вращательного движения проходит нелинейно. Этот эффект проявляется на малых углах оси кривошипа относительно оси шатуна - так называемые мертвые точки, при которых начинается нелинейность передачи движения. Угол равен 90° около верхней мертвой точки, и столько же - у нижней мертвой точки. Однако, в предложенной конструкции приводного механизма согласно настоящему изобретению у кривошипа нет необходимости совершать оборот вокруг своей оси.
[84] Линейность передачи поступательно-вращательного движения обеспечивается при передаточном числе, лежащим в диапазоне от 40:1 до 60:1, при этом размер хода шатуна варьируется от 75 мм до 85 мм и радиус кривошипа лежит в диапазоне от 35 мм до 45 мм.
[85] Расчет кинематики дельта-робота осуществлялся исходя из необходимости решения двух задач - обратной и прямой кинематики. В первой ситуации известна позиция, куда требуется переместить подвижную часть дельта-робота. Для этого следует определить величины углов, на которые необходимо повернуть оси рычагов 410, чтобы переместиться в желаемую точку в пространстве обозначенную координатами (x, y, z). Поэтому, определения этих углов называется обратной задачей кинематики.
[86] Во второй ситуации, при известности углов, на которые повернуты рычаги 410 относительно оси крепления к основанию (в рассматриваемом варианте осуществления изобретения, за счет использования сервоприводов, можно легко понять, считав датчики положения углов), требуется определить положение подвижной платформы дельта-робота в пространстве. Описанная задача является задачей прямой кинематики.
[87] Кинематика дельта-робота контроллера согласно настоящему изобретению обладает достаточно жесткими и точными несущими способностями.
[88] На цилиндрических направляющих 570 между подвижной платформой 430 и направляющей платформой 550 установлена и закреплена тензоплатформа 610, которая выполнена с возможностью получения цифровой информации в трехмерном пространстве о прикладываемой силе, векторе приложения силы и ускорении приложения силы, передаваемой на кисть от предплечья и иных, вышерасположенных частей руки оператора во время управления мехатронным комплексом. На тензоплатформе 610 установлены тензометрические датчики (тензодатчики) 600 для точного и эффективного определения прикладываемых сил со стороны оператора, которые передаются на тензоплатформу через подшипниковые узлы 620. Тензодатчики 600 преобразуют величину деформации в электрический сигнал.
[89] Конструкция используемых тензодатчиков 600 более подробно изображена на фиг.8. Тензодатчик 600 в одном из вариантов осуществления изобретения - это вытянутый параллелепипед с квадратным сечением, у которого на концах имеются крепежные отверстия 630. По центру на одной из плоскостей, которая расположена перпендикулярно поверхности с крепежными отверстиями 630, предусмотрено сквозное отверстие 640 в виде знака «восьмерки». Отверстие 640 выполнено таким образом, чтобы обеспечить возможность изгиба тензодатчика 600 по краям выреза. На поверхностях с крепежными отверстиями 630 с обеих сторон тензодачика над сквозным отверстием 640 приклеиваются по паре тонкопленочных тензорезисторов 651 (на фиг.7 пара тензорезисторов расположена под крышкой и детально не изображена). Четыре тонкоплёночных тензорезистора, соединёны по мостовой схеме, поэтому тензодатчик 600 имеет 4 вывода 652. Для преобразования величины сопротивлений с выхода тензодатчика в двоичный код, применяется аналого-цифровой преобразователь (не показан на чертеже). Тензодатчик 600, с одной стороны, своим подвижным концом соединен с корпусом опорного подшипника 620, а с другой стороны, другим концом соединен с тензоплатформой 610 через подшипниковый узел тензоплатформы 660.
[90] Тензодатчики 600 расположены на тензоплатформе 610 и сопряжены с каждой шарико-винтовой передачей, а именно, с валом шарико-винтовой передачи, через опорные подшипниковые узлы 620.
[91] При возникновении усилий со стороны оператора механическая сила, прикладываемая оператором и передаваемая от предплечья на кисть оператора, проходит через подвижную платформу 430 по штангам параллелограммов 440 равной длины, расположенным попарно параллельно и соединенными одними концами за приводной кривошипно-шатунный механизм. Кривошипно-шатунный механизм, в свою очередь, соединен с шарико-винтовой передачей. В частности, рычаг 410 соединен с верхним подшипниковым узлом 460 и через шатун 590 с нижним подшипниковым узлом 560. Таким образом, вращательные движения рычага 410 переводятся в поступательные движения направляющей платформы 550 (см. фиг.6), на которой установлены нижние подшипниковые узлы 560 и гайка 540 шарико-винтовой передачи. Поступательные движения от гайки 540 передаются во вращательные движения вала 520 шарико-винтовой передачи, который воздействует на опорный подшипниковый узел 620. Следовательно, через шарико-винтовую передачу кривошипно-шатунный механизм действует на опорно-подшипниковый узел 620. Установленный тензодатчик 600 на тензоплатформе 610 своим подвижным концом соединен с корпусом опорного подшипника 620. Тензодатчик 600 преобразует величину деформации в электрический сигнал и передает его через свои выходы на цифровой блок управления контроллером (не показан на чертеже).
[92] Цифровой блок управления контроллером в свою очередь на основании полученного сигнала по заданной программе рассчитывает траекторию перемещения дельта-робота по трем линейным координатам и при помощи сервоприводов перемещает блок позиционирования в требуемую позицию. Например, цифровой блок управления может быть выполнен с возможностью сравнения получаемого значения сигнала о деформации, а следовательно, о перемещении, с заранее заданным значением, которое определяет положение дельта-робота в равновесии и подачи такого управляющего сигнала на сервопривод, чтобы значение с датчика положения углов стало как можно ближе к значению внешнего управляющего параметра. Такой механизм позволяет реализовать механизм регулируемого противодействия естественному опусканию дельта-робота под воздействием силы тяжести подвижных частей контроллера - систему «виртуального веса» (СВВ). СВВ позволяет регулировать вес, ощущаемый человеком на управляющей ручке контроллера в диапазоне от фактического 100% - до 0% - «нулевая плавучесть».
[93] Система «виртуального веса» мультиплицирует величину усилия прикладываемую рукой оператора к управляющей ручке контроллера, что позволяет индивидуально подбирать и всегда обеспечивать комфортное и постоянное для человека усилия при воздействии на контроллер независимо от размера и веса составляющих контроллера деталей.
[94] Цифровой блок управления контроллером сконфигурирован и построен таким образом, что позволяет сосредоточить максимум усилий на алгоритмах управления высокого уровня, освобождая пользователя от необходимости разработки и отладки устройств и приложений для управления отдельными сервоприводами. Цифровой блок управления контроллером имеет возможность записи всех управляющих команд и передачи их на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
[95] Таким образом, конфигурация контроллера руки позволяет перемещать его рукой оператора по трем линейных координатам, не затрачивая значительных сил руки оператора, компенсируя недостающую силу работой исполнительных двигателей, управляемых сигналами от цифрового блока управления контроллера для получения точных координат положения кисти от перемещения предплечья и иных, вышерасположенных частей руки оператора-хирурга по как минимум трем степеням свободы и компенсации веса контроллера руки в статике или при движении.
[96] Контроллер может быть использован в качестве тренажера для отработки тех или иных действий. Для этого управление осуществляется согласно заранее составленной и остающейся неизменной в текущем процессе управляющей программе. Сигнал с системы числового программного управления (ЧПУ) поступает на цифровой блок управления контроллером, который на основе заданного алгоритма управляет механизмом приводов соответствующим образом для того, чтобы перевести блок позиционирования с подвижной площадкой в нужные координаты.
[97] В некоторых вариантах реализации контроллера согласно изобретению цифровой блок управления контроллером может обеспечивать сопротивление/противодействие руке человека с заданными/расчетными усилиями и ускорениями путем подачи управляющего сигнала на приводной механизм, который может быть оснащены электромагнитными тормозами. Механизм сопротивления/противодействия может быть включен постоянно путем подачи сигнала с системы числового программного управления (ЧПУ) контроллера на цифровой блок управления контроллером и на электромагнитные тормоза приводного механизма соответственно.
[98] Перед каждым использованием контроллера руки происходит его калибровка под пользователя. Контроллер руки обладает гибкими настройками, что позволяет его ориентировать под разные задачи. При пользовании контроллером его можно полностью адаптировать под оператора и его задачи.
[99] Таким образом, усовершенствованная конструкция контроллера руки, входящая в состав контроллера управления роботохирургическим комплексом позволяет совершать более точные движения рук хирурга. Так, применения дельта кинематики обеспечивает высокую жесткость конструкции, что приводит к более точному измерению сигналов о положении в пространстве руки оператора. Разработка приводного механизма дельта робота с использованием шарико-винтовой передачи и кривошипно-шатунного механизма обеспечила прецизионную точность перемещения поступательных степеней свободы и позволила улучшить масштабируемость системы. Использования танзодатчиков в качестве датчиков силы дает возможность получения цифровой информации в трехмерном пространстве о прикладываемой силе, векторе приложения силы и ускорении приложения силы во время управления роботохирургическим комплексом.
[100] На фиг. 9 изображен перспективный вид контроллера управляения мехатронными устройствами, позволяющий считывать шесть степеней свободы и состоящий из контроллера руки, контролера запястья и контроллера кисти.
[101] Контроллер запястья прикрепляется к подвижной платформе контроллера кисти. Главным предназначением контроллера запястья является реализация контакта и взаимодействия с запястьем оператора и обеспечение, по меньшей мере, двух вращательных степеней свободы для реализации ориентации элемента мехатронного комплекса в ответ на поворот запястья оператора, так и для передачи усилий на запястье оператора при симуляции того или иного действия для обучения оператора.
[102] Контроллер запястья выполнен с возможностью наиболее точно на всей амплитуде точно определять угол поворота запястья в двух ортогональных направлениях относительно заданного центра вращения (относительно места крепления контроллера запястья к контроллеру руки) для получения цифровой информации о поворотах в запястье руки оператора во время управления мехатронным комплексом. Конструкция контроллера запястья ограничена и задана физиологическим углом возможного поворота запястьем кисти в этих плоскостях.
[103] Контроллер запястья имеет в составе по меньшей мере два блока: блок механизма поворота и блок подвижной консоли, каждый из которых обеспечивают две степени свободы запястья, - и по меньшей мере один блок управления контроллера запястья.
[104] Блок механизма поворота закреплен на контроллере руки 1200 таким образом, чтобы иметь возможность вращения относительно продольной оси контроллера руки 1200, обеспечивая при этом одну степень свободы контроллера кисти. Для кисти такой поворот блока механизма поворота - обычный поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси (на фиг.11 данный поворот вокруг оси СС′ обозначен цифрой 5). Структура блока подвижной консоли обеспечивает одну степень свободы относительно блока механизма поворота. При этом кисть совершает качательное движение относительно переднезадней оси ВВ′ во фронтальной плоскости T (движения обозначены стрелкой 3 и стрелкой 4 на фиг.11). Амплитуда этих движений измеряется от оси кисти. Объем этого движения может варьировать от 30° до 55° в зависимости от физиологических возможностей оператора.
[105] Использование по меньшей мере одного датчика определения угла поворота для каждой вращательной степени свободы позволяет определять абсолютное положение угла наклона контроллера запястья. В некоторых вариантах осуществления в дополнение к датчикам поворота для определения абсолютного положения того или иного элемента, входящих в состав контроллера, указанные элементы могут быть оснащены тахометрами, измерителями ускорения и нагрузочными элементами индикации силы, каждый из которых может обеспечивать электрические сигналы, относящиеся к скорости, ускорению и силе, прилагаемым к соответствующему элементу.
[106] Для считывания данных с датчиков определения угла поворота и осуществления поворота блока подвижной консоли и/или блока механизма поворота контроллер кисти включает приводные элементы.
[107] Для определения координат кистевого аппарата хирурга в составе контроллера оператора управления мехатронным комплексом используют контроллер кисти. Контроллер кисти предназначен для контакта и взаимодействия с кистью хирурга и наиболее точно, на всей амплитуде движения руки и при всех углах движения рук, контролирует как минимум один угол поворота кисти руки, который является углом отклонения кисти (движение кисти обозначено стрелкой 1 и стрелкой 2 на фиг. 11) в лучезапястном суставе в сагиттальной плоскости относительно поперечной оси, лежащей во фронтальной плоскости, и перемещение, взаимоположение друг относительно друга как минимум двух пальцев, преобразуя эту информацию в цифровой сигнал.
[108] Дополнительно контроллер кисти обеспечивает минимальную нагрузку веса на кисть оператора при управлении, имеет и реализует канал обратной связи от элемента роботизированного технологического комплекса или системы управления в целом, преобразуя цифровой управляющий сигнал в механическое перемещение, такое как отклонение кисти руки (девиация) оператора в сагиттальной плоскости относительно поперечной оси кисти и/или механическое перемещение как минимум двух пальцев оператора.
[109] Контроллер кисти характеризуется тем, что содержит рукоятку с пальцевыми схватами. Рукоятка имеет корпус, охватываемый и удерживаемый оператором во время работы. Пальцевые схваты выполнены с возможностью расположения на них пальцев оператора во время работы. Контроллер кисти включает датчики поворота пальцевых схватов для определения абсолютного положения пальцевых схватов относительно оси вращения пальцевых схватов и датчик поворота рукоятки для определения абсолютного положения рукоятки относительно ее продольной оси, приводные элементы рукоятки и пальцевых схватов, блок управления контроллером запястья.
[110] При возникновении усилий со стороны оператора контроллер кисти контролирует и оцифровывает отклонение кисти оператора в сагиттальной плоскости относительно поперечной оси кисти, находящейся во фронтальной плоскости (девиация кисти в лучезапястном суставе), а также положение (приближение/смыкание/удаление) как минимум двух пальцев, охватывающих вместе с кистью оператора рукоятку контроллера кисти в области пальцевых схватов.
[111] При повороте рукоятки кистью руки оператора датчик поворота рукоятки формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера кисти, который рассчитывает угол отклонения рукоятки относительно ее продольной оси и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
[112] Пальцевые схваты работают в сочетании. В одном из вариантов осуществления один пальцевой схват выполнен за одно целое с корпусом рукоятки и неподвижен относительно него. Другой пальцевой схват подвижен и имеет один поворот, вращаясь вокруг своей оси, совпадающей с продольной осью рукоятки. Во время работы датчик поворота пальцевых схватов считывает угол поворота подвижного пальцевого схвата вокруг своей оси вращения и передает цифровой сигнал в блок управления контроллера кисти, который рассчитывает его положение относительно неподвижного пальцевого схвата и передает эту информацию на цифровой контроллер, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
[113] В обратном порядке работы, цифровой блок управления контроллером на основе полученных данных планирует траекторию поворота рукоятки и/или пальцевых схватов относительно продольной оси рукоятки и оси вращения пальцевых схватов, которая совпадает с продольной осью рукоятки, и при помощи подачи управляющего сигнала на приводной элемент рукоятки и/или приводной элемент пальцевых схватов перемещает рукоятку и/или пальцевые схваты и непосредственно саму кисть оператора, находящуюся в плотном контакте с корпусом рукоятки, в требуемую позицию.
[114] В некоторых вариантах осуществления контроллера кисти согласно изобретению цифровой блок управления контроллером может обеспечивать управляющие сигналы через блок управления контроллером кисти на приводной элемент рукоятки и/или приводной элемент пальцевых схватов для ускорения и/или противодействия (сопротивления) поворота рукоятки и/или подвижного пальцевого схвата с заданными/расчетными усилиями и ускорениями при прикладывании усилий со стороны оператора. Механизм ускорения/противодействия может быть включен постоянно путем подачи сигнала на цифровой блок управления контроллером с системы числового программного управления (ЧПУ) контроллера.
[115] Таким образом, когда оператор охватывает рукоятку всей поверхностью кисти и поворачивает рукоятку на произвольный угол в сагиттальной плоскости относительно поперечной оси кисти, то в некоторых вариантах осуществления цифровой блок управления контроллером может опосредованно направлять управляющие команды на приводной элемент рукоятки для того, чтобы осуществить поворот рукоятки в сторону, совпадающую с поворотом кисти или, наоборот, в сторону, противоположную повороту кисти для противодействия кисти.
[116] При манипулировании оператором рукояткой, входящей в состав контроллера кисти, у оператора также могут одновременно возникать усилия для поворота элементом контроллера запястья, которые повторяют отведение или приведение кисти, которое также иногда называется лучевой девиацией кисти, а также поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора. Контроллер запястья контролирует и оцифровывает данные усилия.
[117] При отклонении блока подвижной консоли запястьем руки оператора от переднезадней оси, лежащей в сагиттальной плоскости датчик поворота блока подвижной консоли формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера запястья, который рассчитывает угол отклонения консоли и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
[118] При повороте блока механизма поворота вокруг заранее заданного центра запястьем руки оператора датчик поворота блока механизма поворота формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера запястья, который рассчитывает угол отклонения блока относительно продольной оси руки оператора и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
[119] Цифровой блок управления контроллером на основе полученных данных планирует траекторию поворота блока механизма поворота и/или блока подвижной консоли и при помощи подачи управляющего сигнала на приводной элемент блока механизма поворота и/или блока подвижной консоли перемещает блок механизма поворота и/или блок подвижной консоли и непосредственно само запястье руки оператора в требуемую позицию.
[120] Контроллер кисти, контроллер запястья, как и контроллер руки, описанный выше, могут быть использованы в качестве тренажера для отработки тех или иных действий. Для этого управление осуществляется согласно заранее составленной и остающейся неизменной в текущем процессе управляющей программе. Сигнал с системы числового программного управления (ЧПУ) поступает на цифровой блок управления контроллером, который на основе заданного алгоритма передает управляющие сигналы на:
[121] блок управления контроллером кисти, который в свою очередь управляет работой приводного элемента механизма поворота рукоятки и/или механизма поворота пальцевых схватов соответствующим образом для того, чтобы перевести рукоятку и/или по меньшей мере один пальцевой схват в нужные координаты;
[122] блок управления контроллером запястья, который в свою очередь управляет работой приводного элемента блока механизма поворота рукоятки и/или блока подвижной консоли для того, чтобы осуществить поворот блока механизма поворота и/или блока подвижной консоли на рассчитанный угол. При этом жестко закрепленная рукоятка с удерживающей этот корпус кистью руки к блоку подвижной консоли также поворачивается. Контроль соответствующих заданных углов поворота осуществляют датчик поворота блока механизма поворота и датчик поворота блока подвижной консоли.
[123] Приводной элемент рукоятки при поступлении управляющего сигнала для приведения его в движение осуществляет поворот рукоятки вместе с жестко прикрепленным корпусом с удерживающей этот корпус кистью руки. Контроль заданного угла поворота осуществляет датчик поворота рукоятки.
[124] Приводной элемент по меньшей мере одного пальцевого схвата при поступлении на него управляющего сигнала для приведения приводного элемента в движение осуществляет поворот подвижного пальцевого схвата на рассчитанный радиус, перемещая таким образом по меньшей мере один палец, удерживающий пальцевой схват на величину, задаваемую цифровым сигналом от цифрового блока управления контроллером. Радиус поворота подвижного пальцевого схвата контролирует датчик поворота пальцевых схватов.
[125] Приводной элемент блока механизма поворота и/или приводной элемент блока подвижной консоли при поступлении управляющего сигнала на них осуществляют поворот контроллера запястья по двум степеням свободы.
[126] Система числового программного управления (ЧПУ) контроллера обеспечивает преобразование координат рукоятки, пальцевых схватов, блока подвижной консоли, блока механизма поворота, подвижной платформы в координаты исполнительного устройства и формирование сигналов управления приводами по каждой степени подвижности исполнительного устройства таким образом, чтобы то или иное движение исполнительного устройства соответствовало направлению, в котором оператор воздействовал на рукоятку контроллера кисти в составе контроллера. На фиг. 10 схематично отражена схема управления контроллером.
[127] Цифровой блок управления контроллером в общем случае является частью многофункционального контроллера и обеспечивает двунаправленный обмен данными между блоком приводов контроллера, блоками управления контроллера кисти и контроллера запястья и дополнительным оборудованием. Цифровой блок управления также имеет возможность синхронного управления указанными механизмами контроллера.
[128] Блоки управления контроллера кисти и/или управления контроллера запястья, тензоплатформа, цифровой блок управления контроллером могут быть сопряжены с цифровым блоком управления контроллером посредством общей шины передачи данных. Цифровой блок управления контроллером выполнен с возможностью записи данных о получаемых/передаваемых командах.
[129] Таким образом, цифровой блок управления контроллером имеет возможность повторить/продемонстрировать перемещения записанных команд как в свободном режиме, так и передавая движения на находящуюся на рукоятке контроллера руке.
[130] Средства передачи данных выбираются из устройств, предназначенных для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: GSM модем, Wi-Fi приемопередатчик, Bluetooth или BLE модуль, GPRS модуль, Глонасс модуль, NFS, Ethernet и т.п.
[131] Перед каждым использованием контроллера происходит его калибровка под пользователя. Контроллер обладает гибкими настройками, что позволяет его ориентировать под разные задачи. При пользовании контроллером его можно полностью адаптировать под оператора и его задачи.
[132] В то время как изобретение было описано в определенных примерах и показано на сопровождающих чертежах, следует понимать, что подобные воплощения являются единственно иллюстративными и не ограничивают широту изобретения и что это изобретение не ограничивается показанными и описанными определенными конструкциями и системами, поскольку могут иметь место различные другие модификации, понятные для обычных специалистов этой области.
| название | год | авторы | номер документа |
|---|---|---|---|
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| ТЕНЗОПЛАТФОРМА ДЛЯ РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2715400C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |

Изобретение относится к медицине, а именно к области контроля и управления роботизированными хирургическими комплексами для проведения минимально инвазивных хирургических операций. Контроллер оператора для управления роботохирургическим комплексом включает неподвижную опорную платформу, подвижную платформу, приводной механизм исполнительного механизма и тензоплатформу. Подвижная платформа расположена параллельно неподвижной опорной платформе и соединена с ней посредством исполнительного механизма параллельной структуры. Исполнительный механизм параллельной структуры представляет собой три кинематические цепи, связанные одними своими концами с соответствующими подшипниковыми узлами, закрепленными на неподвижной опорной платформе, а другими концами – с подвижной платформой. Каждое звено приводного механизма выполнено в виде кривошипно-шатунного механизма, приводимого в движение сервоприводом с шарико-винтовой передачей. Тензоплатформа установлена между подвижной платформой и неподвижной опорной платформой и соединена с последней посредством цилиндрических направляющих. На тензоплатформе расположены сопряженные с каждой шарико-винтовой передачей тензодатчики. К подвижной платформе прикреплена управляющая ручка с возможностью ее охвата кистью руки оператора и сконфигурированная для контроля и преобразования в цифровой сигнал движения руки оператора по меньше мере по трем вращательным степеням свободы и силового воздействия на тензоплатформу по трем линейным степеням свободы. Формирующийся на тензодатчиках сигнал передаётся на цифровой блок управления контроллером, который рассчитывает и передает на сервопривод соответствующего звена приводного механизма упомянутого исполнительного механизма команды компенсации веса. Изобретение обеспечивает сокращение нагрузки на руки оператора-хирурга и повышение точности определения положения и диапазона перемещения рук. 7 з.п. ф-лы, 11 ил.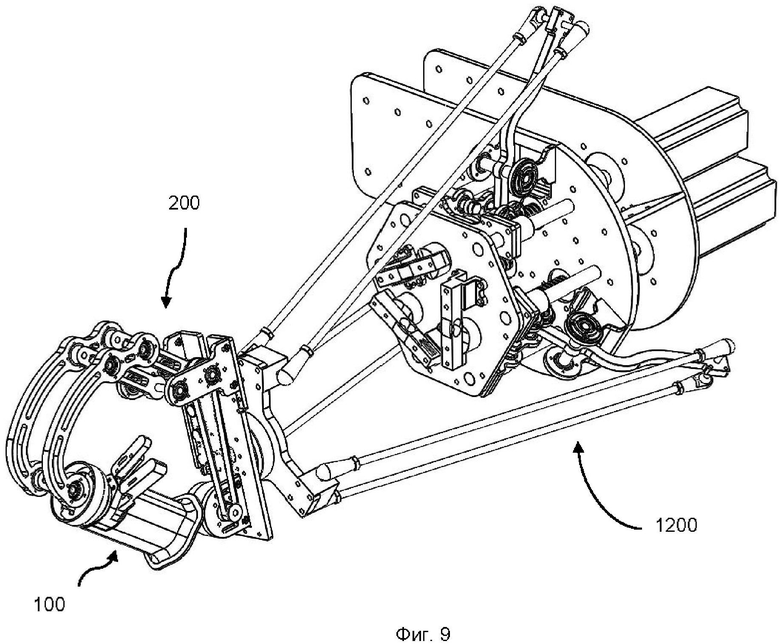
1. Контроллер оператора для управления роботохирургическим комплексом, включающий
- неподвижную опорную платформу,
- подвижную платформу, расположенную параллельно неподвижной опорной платформе и соединенную с ней посредством исполнительного механизма параллельной структуры, исполнительный механизм параллельной структуры представляет собой три кинематические цепи, связанные одними своими концами с соответствующими подшипниковыми узлами, закрепленными на неподвижной опорной платформе, а другими концами – с подвижной платформой;
- приводной механизм исполнительного механизма, причем каждое звено приводного механизма выполнено в виде кривошипно-шатунного механизма, приводимого в движение сервоприводом с шарико-винтовой передачей;
- тензоплатформу, установленную между подвижной платформой и неподвижной опорной платформой и соединенную с последней посредством цилиндрических направляющих, причем на тензоплатформе расположены сопряженные с каждой шарико-винтовой передачей тензодатчики;
при этом к подвижной платформе прикреплена управляющая ручка с возможностью ее охвата кистью руки оператора и сконфигурированная для контроля и преобразования в цифровой сигнал движения руки оператора по меньше мере по трем вращательным степеням свободы и силового воздействия на тензоплатформу по трем линейным степеням свободы;
при этом формирующийся на тензодатчиках сигнал передаётся на цифровой блок управления контроллером, который рассчитывает и передает на сервопривод соответствующего звена приводного механизма упомянутого исполнительного механизма команды компенсации веса.
2. Контроллер оператора по п.1, характеризующийся тем, что исполнительный механизм параллельной структуры представляет собой дельта-робот.
3. Контроллер оператора по п.1, характеризующийся тем, что сервопривод выполнен со встроенным электромагнитным тормозом и датчиком положения углов.
4. Контроллер оператора по п.1, характеризующийся тем, что управляющая ручка включает контроллер запястья, сконфигурированный для контроля и преобразования в цифровой сигнал движения запястья оператора по двум вращательным степеням свободы в ортогональных плоскостях, и контроллер кисти, обеспечивающий непосредственный контакт со всей поверхностью кисти оператора во время управления контроллером.
5. Контроллер оператора по п. 4, характеризующийся тем, что контроллер кисти включает рукоятку для контроля и преобразования в цифровой сигнал движения кисти оператора по одной вращательной степени свободы и пальцевые схваты для контроля и преобразования в цифровой сигнал положения пальцев руки оператора относительно рукоятки, а контроллер запястья включает блок механизма поворота и блок подвижной консоли.
6. Контроллер оператора по п. 5, характеризующийся тем, что управляющая ручка включает блок управления контроллером запястьем, блок управления контроллером кисти, датчик поворота блока механизма поворота, датчик поворота блока подвижной консоли, приводной элемент блока механизма поворота, приводной элемент блока подвижной консоли, датчик поворота пальцевых схватов, датчик поворота рукоятки, приводной элемент по меньшей мере одного пальцевого схвата, приводной элемент рукоятки.
7. Контроллер оператора по п. 6, характеризующийся тем, что цифровой блок управления сконфигурирован для получения сигналов о текущем состоянии усилий со стороны оператора от тензоплатформы и/или сигналов от контроллера кисти о повороте рукоятки и/или по меньшей мере одного пальцевого схвата и/или сигналов от контроллера запястья о повороте блока механизма поворота и/или блока подвижной консоли и передачи полученных сигналов на внешнюю систему управления роботохирургическим комплексом.
8. Контроллер оператора по п.7, характеризующийся тем, что цифровой блок управления сконфигурирован для получения управляющих сигналов от внешней системы управления роботохирургическим комплексом и передачи их на приводной элемент блока механизма поворота и/или приводной элемент блока подвижной консоли и/или приводной элемент рукоятки и/или приводной элемент по меньшей мере одного пальцевого схвата.
| US 20140192020 A1, 10.07.2014 | |||
| Самоустанавливающийся нивелир | 1960 |
|
SU140220A1 |
| WO 2019222495 A1, 21.11.2019 | |||
| WO 2007136739 A2, 29.11.2007 | |||
| US 20120150349 A1, 14.06.2012 | |||
| WO 2003038541 A3, 08.05.2003. | |||

