Область техники, к которой относится изобретение
[1] Изобретение относится к области машиностроения, а именно к механизмам - контроллерам, предназначенным для управления оператором мехатронными устройствами. Контроллер может быть применен в следующих областях: медицинское оборудование, игровая индустрия, трехмерное компьютерное моделирование и дизайн. Более конкретно, изобретение может относится к области контроля и управления роботизированными хирургическими комплексами для проведения минимально инвазивных хирургических операций. В частности, изобретение относится к устройствам для преобразования движения запястья руки хирурга в цифровую команду для управления хирургическим инструментом, и для преобразования в обратном порядке, а именно, преобразования цифровых команд в механические движения, передаваемые на запястье руки хирурга.
Предпосылки создания изобретения
[2] Современные роботы повышают производственную эффективность, прежде всего автоматизируя выполнение технологических процессов. Однако, роботы имеют и иные преимущества, создающие основу инновационных технологий и изделий.
[3] Простые системы пользовательского интерфейса могут обеспечивать отдельно задаваемое системой числового программного управления (ЧПУ) управление для каждого подвижного соединения робота, роботизированного манипулятора или другого ведомого устройства. Более сложные системы могут включать ручные контроллеры (иногда в форме джойстика или пистолетной рукоятки), которые воспринимают движение рукой пользователя. Система управления роботом реагирует на эти управляющие сигналы, активируя определенные сервомоторы, соленоиды или другие устройства в роботизированном манипуляторе для обеспечения желаемого действия.
[4] С одной стороны, контроллер, в прямом порядке работы, обеспечивает управление и контроль, с другой стороны, в обратном порядке работы, он обеспечивает тактильное ощущение взаимодействия с технической системой через виртуальный контакт с исполнительным механизмом. В качестве исполнительного механизма может выступать робот или манипулятор, а в качестве тактильного устройства - контроллер, силы воздействия которого ограничены и соизмеримы с силой рук оператора.
[5] Контроллер генерирует один или несколько управляющих сигналов, которые затем используются для управления различными движениями манипулятора, преобразуя механические движения руки по шести степеням свободы в команды для мехатронного комплекса. Контроллер также предоставляет пользователю информацию с обратной связью по силе, поступающей на вход движения, или силе, прилагаемой пользователем.
[6] Контроллер для дистанционного управления движением манипулятора может быть отделен от исполнительного механизма значительным расстоянием (например, контроллер может находиться в другой комнате или в совершенно другом здании). В качестве альтернативы, контроллер может быть расположен совсем рядом с исполнительным механизмом.
[7] Одна из широко используемых областей применения таких контроллеров - роботизированные хирургические системы, которые применяются в малоинвазивных медицинских операциях. Во время операции управление манипуляторами и закрепленными на них хирургическими инструментами выполняется хирургом при помощи контроллеров управления. Система управления роботизированным хирургическим комплексом реагирует на управляющие сигналы от контроллера в цифровом виде. Такой порядок управления позволяет с масштабом передать на исполнительный инструмент движения рук хирурга и повысить точность соответствующих движений этих инструментов.
[8] Для проведения такого рода операций необходимо обеспечивать по меньшей мере шесть степеней свободы для медицинского инструмента, который должен осуществлять поступательные и вращательные движения. Особое внимание уделяется способам и методам преобразования механических вращательных движений руки оператора в управляющие команды для роботохирургического комплекса, так как значительная часть операционных действий осуществляется непосредственно кончиком медицинского инструмента, например, наложение швов, коагуляция и др.
[9] Помимо обеспечения управления, контроллер необходим для тактильного ощущения взаимодействия с роботохирургической системой, что является важной особенностью для повышения эффективности операций, проведенных с помощью таких систем. При этом, диапазоны движения контроллера управления ограничены как механическими особенностями реализации, так и биологическими особенностями строения человеческой руки, запястья, кисти.
[10] Немаловажным фактором является обеспечение удобства и эргономичности такого рода контроллеров управлений, так как операции могут занимать продолжительное время, что не должно влиять на утомляемость и усталость оператора-хирурга.
[11] Таким образом, существует потребность в создании контроллера запястья, входящего в состав контроллера управления для роботизированной хирургической системы, с минимально возможной нагрузкой веса на руку, и обеспечивающего точное преобразование механических вращений запястья хирурга вокруг двух осей в управляющие воздействия на хирургический инструмент, с возможностью обратного преобразования цифрового сигнала в управляющие воздействия на контроллер запястья для обеспечения тактильной связи.
[12] Примером таких разработок является контроллер управления, раскрытый в заявке US 2014192020 A1. Контроллер обеспечивает по меньшей мере три вращательные степени свободы и крепится на устройство с параллельной кинематической структурой, которое обеспечивает по меньшей мере три поступательные степени свободы. Конструктивно контроллер содержит три вращательных шарнирных соединения, каждое из которых обеспечивает вращательную степень свободы относительно локальной точки соединения рукоятки с устройством, обеспечивающим поступательные перемещения, и содержит по меньшей мере один датчик положения вращения и по меньшей мере один привод. Данная конструкция позволяет передавать тактильную обратную связь на контроллер управления.
[13] Описываемый контроллер управления условно состоит из двух различных систем - контроллера запястья и контроллера кисти, необходимых для обеспечения соответствующих степеней свободы.
[14] Особый интерес представляет вариант конструкции контроллера запястья, который описывает вращения по осям крена и тангажа, реализованные шарнирными соединениями. Установленные в шарнирных соединениях приводы позволяют реализовать тактильную обратную связь для запястья оператора в случае необходимости. Во время работы оператора общий центр вращения располагается внутри ладони пользователя между большим и контактирующим с захватом пальцами. Для обеспечения контакта с пальцами используется захват, который крепится к вращательному соединению. Для компенсации силы тяжести для контроллера запястья используется противовесная конструкция.
[15] К существенным недостаткам рассматриваемого прототипа относится:
1. Расположение шарнирного соединения в контроллере запястья слева для правой руки и нахождение шарнирного соединения справа для конструкции контроллера для левой руки значительно уменьшают рабочую области для поступательных движений в случае сведения рук оператором-хирургом.
2. Конструкция контроллера запястья не гарантирует жесткость, а как следствие точность работы конструкции, что является немаловажным фактором для задающего устройства при проведении роботохирургической операции.
3. Ограничение диапазона вращения контроллера запястья относительно оси тангажа из-за геометрической формы схвата и из-за расположения оси тангажа, которая изначально отклонена относительно оси крена. Такое начальное положение необходимо для обеспечения параллельности плоскостей схвата и пластины, при помощи которой устройство активного захвата крепится к устройству с параллельной кинематической структурой.
4. Ограничение диапазона вращения контроллера запястья относительно оси крена из-за геометрической формы схвата, устроенной таким образом, чтобы обеспечивать удобное расположение запястья оператора-хирурга в начальный момент времени. Однако, во время проведения хирургической операции, в случае необходимости наклонения контроллера запястья вперед относительно оси крена, могут возникнуть затруднения, связанные с физиологическими особенностями строения человеческого запястья, так как начальное наклонение контроллера управления вынуждает оператора задействовать движение локтями для обеспечения больших углов по оси крена.
[16] Существующие разработки контроллера запястья, входящего в состав контроллера управления, не позволяют в одной известной конструкции решить следующую совокупность проблем:
[17] 1.Обеспечение жесткости конструкции, что гарантирует точность измерения положении запястья оператора.
[18] 2.Эргономичность и удобство активного устройства захвата, учитывающие биологические особенности строения запястья человека.
[19] 3.Наличие механических особенностей конструкции, которые могут косвенно влиять на перемещение и вращение контроллера запястья в рабочей области, в частности, конструкция должна быть легкой, чтобы оператору не приходилось прилагать лишних усилий.
[20] 4.Отсутствие достаточной рабочей области, позволяющей совершать все необходимые операционные воздействия при помощи контроллера запястья, не прилагая при этом дополнительных движений локтями.
[21] 5. Наличие по меньшей мере одного привода на каждой оси вращения для обеспечения тактильной обратной связи.
[22] Именно решению перечисленных проблем посвящена данная заявка.
Суть изобретения
[23] Технической задачей, на решение которой направлено предлагаемое изобретение, является создание контроллера запястья, входящего в состав контроллера управления, который обеспечивает для хирурга возможность усовершенствованного, более маневренного и точного управления элементом роботизированного технологического комплекса с увеличенной, эргономически удобной рабочей областью как контроллера управления в целом, так и контроллера запястья.
[24] При этом контроллер запястья должен наиболее точно на всей амплитуде и при всех углах контролировать как минимум один угол поворота запястья руки оператора, преобразуя эту информацию в цифровой сигнал, передаваемый на управляемый элемент роботизированного технологического комплекса.
[25] Дополнительно контроллер запястья должен реализовывать канал обратной связи от управляемого элемента роботизированного технологического комплекса системы управления, преобразуя цифровой управляющий сигнал в механическое перемещение - поворот запястья руки оператора.
[26] Дополнительно контроллер запястья должен снижать статическую и динамическую нагрузку на запястье руки оператора во время работы, обеспечивая минимальную нагрузку веса на запястье руки при управлении.
[27] Дополнительно контроллер запястья должен преобразовывать движения запястья оператора в цифровую форму, не создавая существенных ограничений естественной подвижности руки оператора.
[28] С целью решения поставленных задач контроллер запястья оператора совместно с контроллером кисти образует управляющую ручку, используемую в составе контроллера оператора для управления роботохирургическим комплексом. Контроллер запястья оператора включает блок механизма поворота, который имеет верхнюю часть и нижнюю часть, корпус эргономичной формы; блок механизма поворота функционально сконфигурирован для соединения с другим элементом, входящим в состав контроллера оператора, который предназначен для обеспечения функции перемещения манипулятора с хирургическим инструментом по трем взаимно ортогональным осям, и независимого поворота вокруг заранее заданного центра, повторяющего поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора, для обеспечения функции вращения манипулятора с хирургическим инструментом вокруг одной оси; по меньшей мере один блок подвижной консоли, который представляет собой плоский незамкнутый механизм параллельной жесткой структуры, состоящий из трех звеньев и трех кинематических пар; блок подвижной консоли функционально сконфигурирован для крепления с одной стороны к верхней части блока механизма поворота, а с другой - к верхней части рукоятки, охватываемой и удерживаемой всей поверхностью кисти оператора во время работы, которая также входит в состав контроллера оператора, и поворота, повторяющего поворот кисти оператора во фронтальной плоскости вокруг переднезадней оси, лежащей в сагиттальной плоскости, для обеспечения функции поворота хирургического инструмента вокруг одной оси. При этом внутри корпуса блока механизма поворота расположены: блок управления контроллера запястья, по меньшей мере один датчик поворота блока подвижной консоли, обеспечивающий электрические сигналы, соответствующие изменению положения блока подвижной консоли относительно блока механизма поворота при повороте кисти оператора, охватывающей рукоятку, во фронтальной плоскости вокруг переднезадней оси, лежащей в сагиттальной плоскости и передающий их на блок управления контроллера запястья, приводной элемент блока подвижной консоли. При этом на внешней стороне корпуса блока механизма поворота расположены: датчик поворота блока механизма поворота, обеспечивающий электрические сигналы, соответствующие изменению положения блока механизма поворота относительно заранее заданного центра при повороте лучевой кости вместе с кистью оператора вокруг локтевой кости относительно продольной оси руки оператора и передающий их на блок управления контроллера запястья, приводной элемент блока механизма поворота, причем датчик поворота блока механизма поворота расположен на оси вращения приводного элемента блока механизма поворота. Причем блок управления контроллера запястья функционально сконфигурирован для передачи полученных сигналов на цифровой блок контроллера оператора и на внешнюю систему управления роботохирургическим комплексом для передачи движения блока механизма поворота и/или блока подвижной консоли в соответствующее независимое движение манипулятора с хирургическим инструментом и/или хирургического инструмента, получения управляющих сигналов от внешней системы управления роботохирургическим комплексом и передачи их на приводной элемент блока механизма поворота и/или приводной элемент блока подвижной консоли для передачи движения манипулятора с хирургическим инструментом и/или хирургического инструмента в соответствующее независимое движение указанных блоков.
[29] В некоторых вариантах изобретения корпус блока механизма поворота имеет эргономичную форму и выполнен с углублением таким образом, чтобы иметь возможность максимально приблизить корпус рукоятки, полностью охватываемой кистью оператора, и обеспечить при этом полную траекторию перемещения указанной рукоятки.
[30] В некоторых вариантах изобретения цифровой блок управления контроллера оператора формирует управляющие сигналы через блок управления запястья на приводной элемент блока механизма поворота и/или приводной элемент блока подвижной консоли для обеспечения поворота указанных блоков в сторону, совпадающую с поворотом кисти оператора вместе с лучевой костью вокруг локтевой кости и/или при отклонении кисти оператора в сторону локтевой кости или в сторону, противоположную повороту кисти и/или отведению кисти соответственно.
[31] В некоторых вариантах изобретения в нижней части корпуса блока механизма поворота смонтирована система грузов обеспечения равновесия в статическом положении и нахождения в вертикальном положении.
[32] В некоторых вариантах изобретения приводной элемент блока подвижной консоли механически связан с блоком подвижной консоли при помощи гибкой передачи.
[33] Указанные задачи решаются за счет изменения конфигурации конструкции контроллера в целом, и в частности, составляющего элемента контроллера - контроллера запястья.
[34] Решение относится к категории контроллеров, предназначенных для манипулирования как объектом, и не требует обязательного механического закрепления руки оператора на элементах конструкции, но данная возможность присутствует.
[35] Объекты и преимущества настоящего изобретения станут более очевидны специалистам после рассмотрения следующего подробного описания и чертежей.
Краткое описание чертежей
[36] Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения.
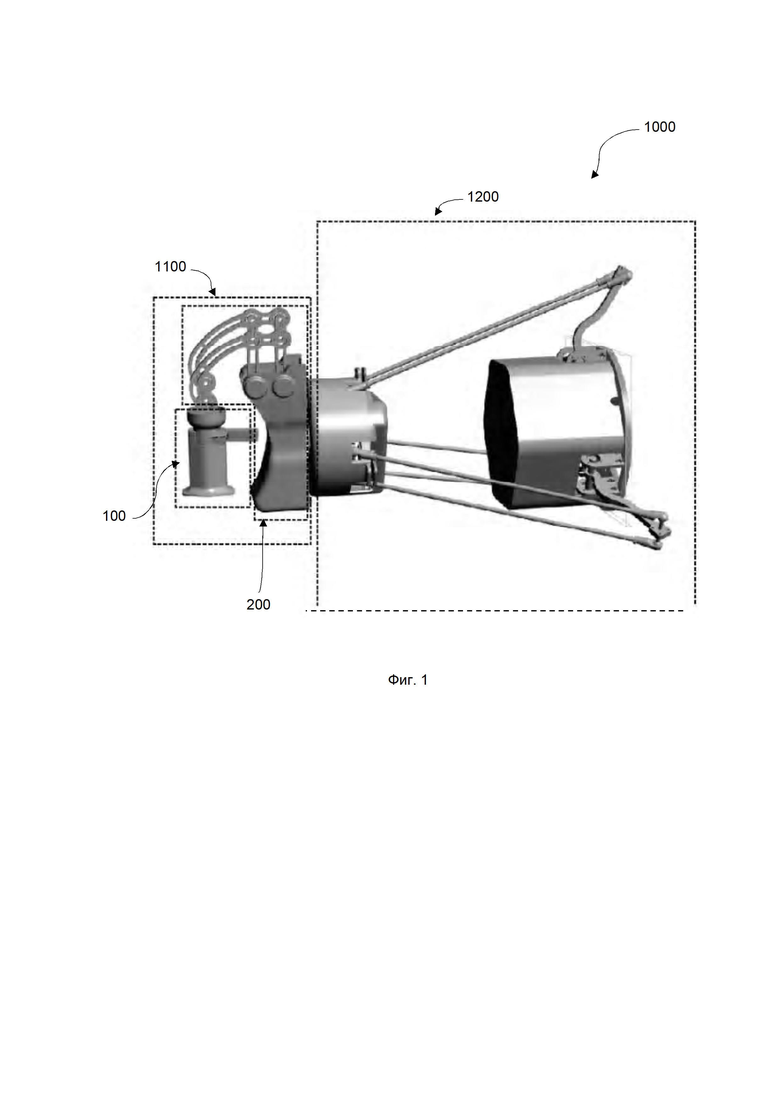
[37] Фиг. 1 иллюстрирует перспективный вид контроллера оператора по настоящему изобретению, предназначенного для управления оператором мехатронными устройствами.
[38] Фиг. 2а и Фиг. 2б иллюстрируют общий вид контроллера запястья для использования в составе управляющей ручки контроллера оператора для управления роботохирургическим комплексом без корпуса и в корпусе соответственно.
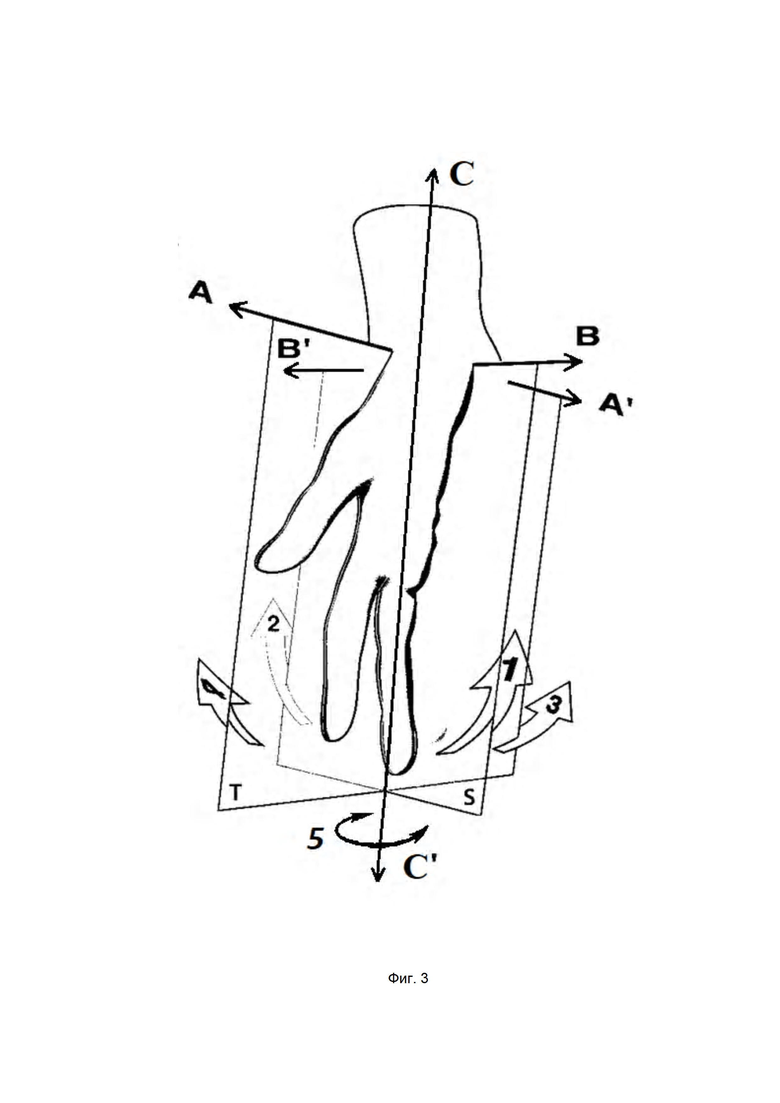
[39] Фиг. 3 схематически отражает плоскости, в которых осуществляются движения кисти оператора в лучезапястном суставе.
[40] Фиг. 4 иллюстрирует общий вид роботохирургического комплекса.
[41] Фиг. 5 иллюстрирует общий вид контроллера запястья с прикрепленным к нему контроллером кисти, в том числе крепление гибкой передачи для вынесения приводного элемента, крепление приводного элемента для блока механизма поворота, входящего в состав контроллера запястья.
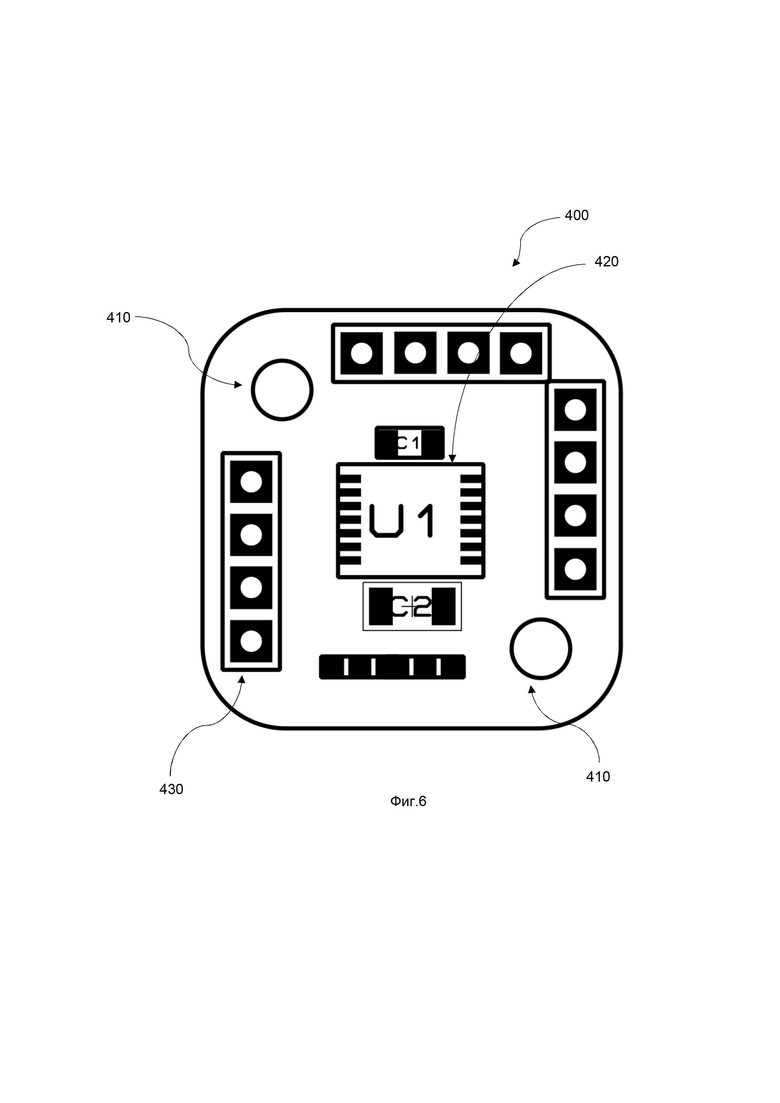
[42] Фиг. 6 иллюстрирует сборочный чертеж печатной платы для установки цифрового магнитного энкодера.
[43] На фиг. 7 изображена трехмерная модель силовой печатной платы.
[44] На фиг. 8 изображена трехмерная модель печатной платы управления.
[45] Фиг. 9 схематически отражает пример контроллера запястья без корпуса с установленными печатными платами согласно настоящему изобретению.
Термины и определения
[46] Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
[47] В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е., в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
[48] В настоящих материалах заявки под терминами «роботизированный технологический комплекс», «роботизированная система», «роботизированный комплекс», «роботохирургический комплекс», «роботохирургическая система» понимают сложные системы или комплексы в хирургии с использованием робота-ассистента во время операции. «Робот-ассистивные системы» или «робот-ассистированные хирургические системы» - это роботизированные системы, предназначенные для проведения медицинских операций. Это не автономные устройства, робот-ассистивными системами при проведении операции управляют хирурги.
[49] В настоящих материалах заявки под термином «мехатронный комплекс» или «мехатронная система» понимают комплекс или систему с компьютерным управлением движения, которые базируются на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
[50] В настоящей заявке под термином «оператор» понимают производящего операции врача-хирурга. Признаки «оператор» и «хирург» в настоящем описании изобретения являются синонимами.
[51] В настоящей заявке используются следующие термины для описания движений кисти в лучезапястном суставе (фиг. 3). Движения кисти происходят вокруг двух осей, когда кисть находится в анатомическом положении, т.е., в положении полной супинации.
[52] Поперечная ось АА′ лежит во фронтальной плоскости Т и контролирует движения сгибания и разгибания, осуществляемые в сагиттальной плоскости:
- отклонение (девиация) кисти или флексия (стрелка 1) - передняя (ладонная) поверхность кисти движется к передней поверхности предплечья,
- отклонение (девиация) кисти или экстензия (стрелка 2) - задняя (тыльная) поверхность кисти движется к задней поверхности предплечья.
[53] Переднезадняя ось ВВ′ лежит в сагиттальной плоскости S и контролирует движения приведения и отведения, происходящие во фронтальной плоскости:
- приведение или локтевая девиация (стрелка 3) - перемещение кисти по направлению к продольной оси тела, ее внутренний (ульнарный) край образует тупой угол с внутренним краем предплечья;
- отведение или лучевая девиация (стрелка 4) - перемещение кисти от продольной оси тела, ее наружный (лучевой) край образует тупой угол с наружным краем предплечья.
[54] Продольная ось CС′ лежит на пересечении сагиттальной плоскости S и фронтальной плоскости Т, контролирует движения вращения кисти:
- поворот лучевой кости (стрелка 5) вместе с кистью вокруг локтевой кости относительно продольной оси.
[55] Под термином «универсальный» в части его использования относительно контроллера в данном документе поднимают контроллер, который «оцифровывает» руку оператора и позволяет не тренировать руку оператора на каждый новый инструмент без последующих изменений конструкции контроллера. Освоив контроллер один раз, оператор использует его на протяжении длительного периода своей практики, благодаря свойству контроллера интегрироваться ("представлять" руку хирурга) в различных, в том числе удаленных мехатронных устройствах.
[56] Пот термином «абсолютная положение» в данной документе понимают координату, определенную относительно неподвижного элемента конструкции.
[57] Под термином «датчик поворота» в данном документе понимают устройство, предназначенное для преобразования угла поворота вращающегося объекта в электрические или аналоговые сигналы, позволяющие определить угол его поворота. Для определения значения угла поворота того или иного элемента в принципе подходят все виды угловых датчиков. Однако, в большинстве используемых датчиков требуется, прежде всего, постоянная регистрация и сохранение текущих данных о повороте элемента. Датчики поворота могут быть использованы на основе инкрементальных и абсолютных энкодеров. Датчики имеют цифровые выходные сигналы Linedriver (TTL, RS422), Push-Pull (HTL), SSI, CAN, Profibus, Profinet и другие. Также могут быть использованы датчики на основе аналоговых датчиков угла поворота и/или магнитных датчиков угла поворота.
[58] Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
[59] Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Подробное описание изобретения
[60] Описание примерных вариантов осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей и не предназначено для ограничения объема раскрываемого изобретения.
[61] Контроллер относится к классу механизмов, обеспечивающих преобразование в электронный цифровой сигнал команд, которые человек задает движением руки. Общий вид контроллера изображен на фиг. 1. Контроллер командный цифровой 1000 в целом состоит из управляющей ручки 1100, блока-платформы позиционирования 1200 и цифрового блока управления (не показан на чертеже).
[62] Указанный контроллер 1000 имеет контур прямой связи для того, чтобы задавать команды от оператора через движение его руки мехатронному устройству, и контур обратной связи для передачи в обратном порядке на руку оператора ответных команд-реакций от мехатронного устройства. Контур обратной связи контроллера 1000 предназначен для передачи на руку тактильных ощущений.
[63] Контакт контроллера 1000 с рукой реализуется на управляющей ручке 1100. Управляющая ручка 1100 в целом состоит из контроллера кисти 100и прикрепленного к нему контроллера запястья 200, каждый из которых обеспечивает по две вращательные степени свободы контроллера 1000. Блок-платформа позиционирования контроллера 1200 представляет собой контроллер руки, обеспечивающий три поступательные степени свободы контроллера 1000 путем возвратно-поступательного движения механизма контроллера 1000 по трем взаимно ортогональным осям. При этом на контроллере руки 1200 закреплен контроллер запястья 200, входящий в состав управляющий ручки контроллера 1100. Таким образом, контроллер оператора 1000 контролирует и преобразует в цифровой сигнал движения руки по шести степеням свободы.
[64] Настоящее изобретение в целом относится к контроллеру запястья оператора 200.
[65] Контроллер запястья 200 оператора используется в составе контроллера для управления мехатронным комплексом, в частности, является элементом управляющей ручки 1100, на которой реализуется контакт контроллера 1000 с рукой оператора.
[66] Главным предназначением контроллера запястья, прикрепляемого к одному из концов контроллера кисти, является реализация контакта и взаимодействия через кисть с запястьем оператора и обеспечение по меньшей мере двух вращательных степеней свободы как для реализации ориентации элемента мехатронного комплекса в ответ на поворот запястья оператора, так и для передачи усилий на запястье оператора при в режиме обратной связи.
[67] Контроллер запястья выполнен с возможностью наиболее точно на всей амплитуде определять угол поворота запястья в двух ортогональных направлениях относительно заданного центра вращения (относительно места крепления контроллера запястья к контроллеру руки) для получения цифровой информации о поворотах в запястье руки оператора во время управления мехатронным комплексом. Конструкция контроллера запястья ограничена и задана физиологическим углом возможного поворота кисти в этих плоскостях.
[68] Контроллер запястья имеет в составе по меньшей мере два блока, которые обеспечивают две степени свободы запястья, и блок управления контроллера запястья. Ниже приводится более детальное описание одного из предпочтительных вариантов осуществления контроллера запястья для использования его в контроллере оператора. Общий вид контроллера запястья представлен на фиг. 2а.
[69] Контроллер запястья включает по меньшей мере один блок подвижной консоли 210 и неподвижный (относительно блока консоли) блок механизма поворота 220. Блок механизма поворота 220 представляет по существу вертикально расположенную площадку крепления 221 блока подвижной консоли 210 и имеет верхнюю часть и нижнюю часть. Блок подвижной консоли 210 с одной стороны выполнен с возможностью крепления к контроллеру кисти 100, а с другой - жестко связан с блоком механизма поворота 220.
[70] В предпочтительном варианте осуществления контроллера запястья 200 согласно настоящему изобретению блок подвижной консоли 210 закреплен в верхней части блока механизма поворота 220. Такое взаимное расположение обусловлено конфигурацией обоих блоков и предназначено для удобства оператора, в частности, для того, чтобы в процессе работы блок подвижной консоли 210 не касался коленей оператора, что обеспечивает комфортную рабочую область. Более того, такая конструкция позволяет уменьшить габаритные размеры контроллера оператора, в состав которого входит контроллер запястья. Также конструкция позволяет увеличить рабочую область оператора, так как позволит сводить руки оператора максимально близко друг к другу.
[71] В некоторых вариантах осуществления контроллер запястья может быть выполнен в виде блока механизма поворота, в верхней части и в нижней части которого закреплены соответствующие блоки подвижной консоли.
[72] Способ крепления блока подвижной консоли 210 с неподвижным блоком механизма поворота 220 и с контроллером кисти 100 может быть выбран из любого известного подходящего способа крепления. Как правило, крепление осуществляют посредством подшипникового узла. Кроме того, данное крепление возможно реализовать с использованием втулки скольжения.
[73] Структура блока подвижной консоли 210, обеспечивающая одну степень свободы относительно блока механизма поворота 220 (звена, принятого за неподвижное, хотя при движении контроллера запястья сам блок механизма поворота перемещается), представляет собой плоский незамкнутый механизм параллельной жесткой структуры, состоящий из трех звеньев и трех кинематических пар. Основными элементами указанного механизма являются: а) стойка, б) коромысло, в) коромысло, обеспечивающие качательное движение (отведение и приведение) кисти в лучезапястном суставе во фронтальной плоскости. Качательное движение осуществляется относительно оси кисти, которая в исходном положении лежит в плоскости, проходящей через средний палец и третью пястную кость, и продольную ось предплечья (кисть совершает качательное движение относительно переднезадней оси ВВ' во фронтальной плоскости T (движения обозначены стрелкой 3 и стрелкой 4 на фиг.3). Амплитуда этих движений измеряется от оси кисти. Объем этого движения может варьировать от 30° до 55° в зависимости от физиологических возможностей оператора. По сравнению с имеющимися конструкциями данная конструкция позволяет увеличить амплитуду вращения запястья по этой оси и расширить рабочую область контроллера оператора так, что при опускании контроллера не возникнет столкновения с коленями оператора.
[74] Независимо от того, движется ли контроллер запястья или нет, характер движения блока подвижной консоли относительно блока механизма поворота остается неизменным.
[75] Блок механизма поворота 220 закреплен на контроллере руки 1200 таким образом, чтобы иметь возможность вращения относительно продольной оси контроллера руки 1200 (данная ось показана на фиг.2а), обеспечивая при этом одну степень свободы. Для запястья оператора такой поворот блока механизма поворота 220 - обычный поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси.
[76] Блок механизма поворота имеет корпус эргономичной формы, внутри которого располагается рама, являющаяся по существу вертикальной площадкой 221. На раме блока механизма поворота смонтированы элементы указанного блока таким образом, чтобы обеспечить максимальную компактность конструкции и оптимальную развесовку блока. В некоторых вариантах осуществления на нижней части площадки 221 находится система грузов, которая крепится на нижней части рамы, для обеспечения равновесия в статическом положении и нахождения в вертикальном положении. Вес системы грузов можно определить расчетным путем исходя из интегрирования. Вес системы грузов и ее расположение рассчитывается из условия равновесия моментов вращений.
[77] Форма корпуса 222 блока механизма поворота 220 имеет такую геометрию, чтобы иметь возможность максимально приблизить контроллер кисти и обеспечить при этом полную траекторию перемещения контроллера кисти 100 (фиг. 2б). В предпочтительном варианте осуществления контроллера запястья 200 согласно изобретению корпус 222 имеет форму параллелепипеда, одна сторона которого, обращенная в сторону расположения контроллера кисти 100, имеет вогнутую поверхность небольшого радиуса. Использование корпуса 222 такой эргономичной формы обеспечивает максимальную компактность конструкции и оптимальную развесовку блока.
[78] Блок механизма поворота 220 контроллера запястья включает следующие элементы: приводной элемент 223 блока подвижной консоли, датчик поворота блока механизма поворота, приводной элемент 224 блока механизма поворота, по меньшей мере один блок управления контроллера запястья и/или контроллера кисти (не показан на фиг. 2), выполненный с возможностью считывания сигналов с датчиков поворота блока механизма поворота и блока подвижной консоли и подачи управляющих сигналов на приводные элементы указанных блоков. В предпочтительных вариантах осуществления блок механизма поворота 220 также включает датчик поворота блока подвижной консоли. На фиг. 2 отражены возможные варианты расположения и крепления 225 датчика поворота блока подвижной консоли. В некоторых вариантах осуществления возможна установка нескольких датчиков поворотов блока подвижной консоли. Установка избыточного количества датчиков поворота позволит повысить точность измерения угла наклона запястья и предоставит возможность использования алгоритмов коррекции угла. Предпочтительный вариант расположения датчика поворота блока механизма поворота, измеряющего угол наклона механизма поворота, указанпозицией226.
[79] В одном из вариантов осуществления внутри корпуса 222 контроллера запястья расположена рама 221, на которой смонтированы датчик поворота блока подвижной консоли, приводной элемент 223 блока подвижной консоли, механически связанный с блоком подвижной консоли 210, например, при помощи гибкой передачи или любым другим известным способом, и по меньшей мере один блок управления контроллера запястья и/или контроллера руки. Все перечисленные элементы электрически связаны между собой. Датчик поворота блока подвижной консоли расположен таким образом, чтобы определять абсолютное положение указанной консоли (угол) при осуществлении ее поворота, повторяющего поворот кисти относительно переднезадней оси, которая лежит в сагиттальной плоскости и контролирует движения приведения и отведения, происходящие во фронтальной плоскости.
[80] В одном из вариантов осуществления контроллера запястья согласно изобретению на корпусе 222 неподвижного блока механизма поворота со стороны, противоположной вогнутой поверхности, закреплена площадка крепления, выполненная в виде пластины. Пластина предпочтительно выполнена плоской. Геометрия пластины может быть выбрана любой, не выходящей за пределы корпуса. На внешней стороне указанной пластины смонтирован приводной элемент 224 блока механизма поворота для осуществления его поворота вокруг заранее заданного центра, повторяющий поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора.
[81] Приводной элемент 224 блока механизма поворота может крепиться другой своей стороной к платформе позиционирования контроллера 1200 таким образом, чтобы в том числе передавать на него вес контроллера запястья и контроллера кисти.
[82] В одном из вариантов осуществления датчик поворота блока механизма поворота расположен на оси вращения приводного элемента. Хотя указанный датчик может быть расположен в любом другом месте таким образом, чтобы определять абсолютное положение блока механизма поворота относительно контроллера кисти. Указанные элементы электрически связаны между собой и с блоком управления контроллера запястья.
[83] Использование по меньшей мере одного датчика определения угла поворота для каждой вращательной степени свободы позволяет определять абсолютное положение угла наклона контроллера запястья. В некоторых вариантах осуществления в дополнение к датчикам поворота для определения абсолютного положения того или иного элемента, входящих в состав контроллера, указанные элементы могут быть оснащены тахометрами, измерителями ускорения и нагрузочными элементами индикации силы, каждый из которых может обеспечивать электрические сигналы, относящиеся к скорости, ускорению и силе, прилагаемым к соответствующему элементу.
[84] Контроллер запястья, как и остальные элементы контроллера, может работать как в фазе передачи команд от запястья руки контроллеру запястья, так и в фазе передач команд от контроллера запястья - запястью руки (режим обратной связи). При решении контроллером запястья прямой задачи осуществляется контроль угла поворота запястья во фронтальной плоскости относительно переднезадней оси кисти (приведение и отведение кисти, отклонение кисти оператора в сторону локтевой кости), а также контроль поворота запястья вокруг заранее заданного центра, повторяющий поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора. При решении обратной задачи перемещение запястья руки осуществляется соответствующим перемещению контроллера запястья образом.
[85] Так, контроллер запястья, в частности, его составляющие элементы, такие как блок механизма поворота и блок подвижной консоли, могут независимо перемещаться согласно заранее составленной управляющей программе. Сигнал с системы числового программного управления(ЧПУ) поступает на цифровой блок управления контроллером, который на основе заданного алгоритма передает управляющие сигналы на блок управления контроллером запястья, который в свою очередь управляет работой приводного элемента блока механизма поворота рукоятки и/или блока подвижной консоли для того, чтобы осуществить поворот блока механизма поворота и/или блока подвижной консоли на рассчитанный угол. При этом жестко закрепленная рукоятка с удерживающей этот корпус кистью руки к блоку подвижной консоли также поворачивается. Контроль соответствующих заданных углов поворота осуществляют датчик поворота блока механизма поворота и датчик поворота блока подвижной консоли.
[86] Приводной элемент блока механизма поворота и/или приводной элемент блока подвижной консоли при поступлении управляющего сигнала на них осуществляют поворот контроллера запястья по двум степеням свободы.
[87] При возникновении усилий со стороны оператора контроллер запястья контролирует и оцифровывает отклонение запястья относительно переднезадней оси, находящейся в сагиттальной плоскости (отведение или приведение кисти, которое также иногда называется лучевой девиацией кисти), а также поворот запястья вокруг заранее заданного центра, повторяющий поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора.
[88] При отклонении блока подвижной консоли запястьем руки оператора от переднезадней оси, лежащей в сагиттальной плоскости датчик поворота блока подвижной консоли формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера запястья, который рассчитывает угол отклонения консоли передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
[89] При повороте блока механизма поворота вокруг заранее заданного центра запястьем руки оператора датчик поворота блока механизма поворота формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера запястья, который рассчитывает угол отклонения блока относительно продольной оси руки оператора и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
[90] Цифровой блок управления контроллером рассчитывает возможную траекторию поворота блока механизма поворота и/или блока подвижной консоли и при помощи подачи управляющего сигнала на приводной элемент блока механизма поворота и/или блока подвижной консоли перемещает блок механизма поворота и/или блок подвижной консоли и непосредственно само запястье руки оператора в расчетную позицию.
[91] В некоторых вариантах осуществления изобретения при приложении усилия запястьем руки для поворота контроллера запястья в двух ортогональных плоскостях цифровой блок управления контроллером может обеспечивать сопротивление/противодействие или придание ускорения блоку механизма поворота или блоку подвижной консоли, и, соответственно, руке человека с заданными/расчетными усилиями и ускорениями путем подачи управляющих сигналов на приводные элементы соответствующих блоков. Механизм сопротивления/противодействия может быть включен постоянно путем подачи сигнала с системы числового программного управления (ЧПУ) контроллера. Например, «подтормаживание» блоков, совместное или независимое, может осуществляться в случае, если движение ограничено определенным углом поворота от оси.
[92] Управляющий сигнал, поступающий на приводные элементы блоков подвижной консоли и/или механизма поворота контроллера запястья может быть сформирован для осуществления «попутного» движения указанных блоков для облегчения перемещения контроллера оператором, уменьшая вес подвижных элементов.
[93] Система числового программного управления (ЧПУ) контроллера обеспечивает преобразование координат блока механизма поворота и/или блока подвижной консоли в координаты управляемого исполнительного устройства мехатронного комплекса и формирование сигналов управления приводами по каждой степени подвижности исполнительного устройства таким образом, чтобы то или иное движение исполнительного устройства соответствовало направлению, в котором оператор воздействовал на контроллер запястья в составе контроллера.
[94] В некоторых вариантах осуществления конструкция контроллера снабжена датчиком присутствия, который выполнен с возможностью определять присутствие людей в помещении, а также их количество, позу и положение их тел, независимо от того двигаются они или нет. В принципе работы датчиков присутствия используются две технологии: ультразвуковая и инфракрасная, для определения присутствия людей в помещении. Датчик присутствия выполнен с возможностью передачи сигнала блокам управления контроллера кисти, контроллера запястья и цифровому блоку управления контроллером.
[95] В некоторых вариантах осуществления изобретения цифровой блок управления контроллером получает сигнал от датчика присутствия и направляет управляющие сигналы на блок приводов контроллера, на блок управления контроллера запястьем, на блок управления кисти, которые в свою очередь управляют работой приводных элементов контроллера запястья и приводных элементов контроллера кисти и оснащены электромагнитными тормозами. Электромагнитные тормоза включаются при получении управляющего сигнала от цифрового блока управления контроллером. При этом контроллер блокируется в том положении, в котором он находился в момент подачи сигнала с датчика присутствия, когда оператор убрал руки с рукоятки контроллера кисти. Электромагнитные тормоза также включаются при случайном отключении электропитания.
[96] Таким образом, в дальнейшем контроллер в целом не может изменить свое положение и не может передать сигнал об изменении своего положения опосредованно на систему числового программного управления (ЧПУ) контроллера даже под воздействием приложенных на него сил. В некоторых вариантах осуществления при необходимости датчик присутствия может быть отключен.
[97] Цифровой блок управления контроллером в общем случае является частью многофункционального контроллера и обеспечивает двунаправленный обмен данными между блоком приводов контроллера, блоками управления контроллера кисти и контроллера запястья и дополнительным оборудованием. Цифровой блок управления также имеет возможность синхронного управления указанными механизмами контроллера.
[98] Блок управления контроллера запястья может быть сопряжен с цифровым блоком управления контроллером посредством общей шины передачи данных. Цифровой блок управления контроллером выполнен с возможностью записи данных о получаемых или передаваемых командах.
[99] Средства передачи данных выбираются из устройств, предназначенных для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: GSM модем, Wi-Fi приемопередатчик, Bluetooth или BLE модуль, GPRS модуль, Глонасс модуль, NFS, Ethernet и т.п.
[100] Перед каждым использованием контроллера происходит его калибровка под пользователя. Контроллер обладает гибкими настройками, что позволяет его ориентировать под разные задачи. При пользовании контроллером его можно полностью адаптировать под оператора и его задачи.
Описание конкретного варианта осуществления изобретения
[101] Одним из перспективных способов применения описанного выше контроллера является использование таких контроллеров в симуляторах хирурга для изучения в виртуальной среде виртуального пациента. С помощью контроллеров пользователь может в виртуальной среде перемещать предметы, поворачивать, хватать и производить все хирургические манипуляции.
[102] Также описанный выше контроллер можно использовать в роботохирургическом комплексе при проведении различных хирургических вмешательств, в том числе в урологии, гинекологии, абдоминальной, нейро- и кардиохирургии. Пример роботохирургического комплекса приведен на фиг. 4.
[103] Роботохирургический комплекс 300 имеет в составе по меньшей мере один манипулятор 310 с прикрепленным к нему хирургическим инструментом 320, блоком управлением манипулятором 330 и интерфейс оператора 340, который получает команды от хирурга, преобразует их в движение хирургического инструмента 320 внутри тела пациента во время проведения хирургической операции и/или обеспечивает все управляющие команды от хирурга комплектующим роботохирургического комплекса. Главным источником команд является рука хирурга. Рука управляет контроллером хирурга, входящего в состав интерфейса хирурга.
[104] Контроллер хирурга преобразует механические движения руки по шести степеням свободы в команды для роботохирургического комплекса 300. Контролер формирует команду на перемещение хирургического инструмента. Дополнительно контроллер выполняет управление поворотами и открытием-закрытием бранша на хирургическом инструменте.
[105] Обычно манипуляторы с хирургическим инструментом смонтированы на хирургическом столе, на котором лежит пациент при проведении операции. В некоторых вариантах осуществления манипуляторы могут быть помещены на тележку или какое-то другое приспособление, в котором манипуляторы будут находиться проксимальнее уровня пациента. Следует понимать, что роботохирургический комплекс 300 может иметь любое число манипуляторов, так, например, один или более манипуляторов. Манипуляторы могут иметь любую конфигурацию.
[106] Каждый манипулятор 310 имеет корпус и узел манипулятора, к которому съемно может быть присоединен хирургический инструмент 320, движение и расположение которого имеет возможность манипулировать хирург с помощью контроллера, который оцифровывает руку хирурга. Контроллер управления разделен на два самостоятельных контроллера - контроллер кисти и контроллер запястья. Такое разделение позволяет разделить вращательные движения руки хирурга с учетом биологических особенностей строения руки.
[107] Настоящее изобретение, раскрытое в данной заявке, по существу представляет собой контроллер запястья, имеющий малые габариты и позволяющий точно определять положение и ориентацию в пространстве запястья хирурга, не создавая при этом лишнюю нагрузку на запястье хирурга. Разработанный контроллер запястья обладает достаточной жесткостью конструкции, причем рабочая область контроллера запястья не ограничивается линейными размерами и механическими особенностями реализации, позволяя работать в полной амплитуде перемещений запястья хирурга. Также контроллер запястья учитывает особенности работы хирурга во время операции, при которых возможно столкновение контроллеров друг с другом при сведении, либо столкновение с коленями хирургам, обеспечивая при это максимально возможное рабочее пространство, реализуемое в данном диапазоне. Контроллер запястья оснащен системой обратной тактильной связи.
[108] Контроллер запястья используется в составе контроллера роботизированного комплекса как элемента управления для обеспечения функции вращения манипулятора с хирургическим инструментом вокруг одной оси и для обеспечения функции поворота хирургического инструмента вокруг одной оси. Контроллер запястья является механическим устройством, осуществляющим взаимодействие по двум вращательным осям. Контроль действия рук хирурга по третьей вращательной оси обеспечивается контроллером кисти, который в рамках данной патентной заявки не рассматривается, но проведение полноценной хирургической операции является возможным лишь при реализации всего контроллера управления роботизированным комплексом, который позволяет задавать три вращательные оси.
[109] В некоторых вариантах осуществления изобретения для контакта руки хирурга с контроллером запястья используется устройство активного захвата, которое может использоваться как контроллер кисти в случае его модификации с учетом требований, предъявляемых к контроллеру кисти. Стоит отметить, что в качестве активного устройства захвата могут выступать любые конструкции с различными геометрическими и эргономичными характеристиками в зависимости от вида решаемой задачи.
[110] Устройство активного захвата и контроллер запястья должен учитывать все линейные размеры расстояний между центрами суставов руки, ее кисти и запястья. Для описания конфигурационных параметров запястья используются параметры геометрии позиций и направлений. Описание направлений будет возможно лишь при связывании систем координат с запястьем, в этом случае базовая система координат будет связана непосредственно с контроллером запястья, и начальной точкой системы координат будет являться точка, в которой сходятся все вращательные оси.
[111] В базовой системе координат вектор начала системы координат запястья будет совпадать с последовательностью поворотов относительно осей вращения на углы Эйлера. Углы Эйлера определяют три поворота системы, которые позволяют привести любое положение системы к текущему.Повороты системы на эти углы называются прецессия, нутация и поворот на собственный угол (вращение). При этом нутационный процесс контроллера запястья аналогичен повороту кисти относительно переднезадней оси, которая лежит в сагиттальной плоскости и контролирует движения приведения и отведения, происходящие во фронтальной плоскости. Процесс вращения контроллера запястья аналогичен повороту лучевой кости вместе с кистью вокруг локтевой кости.
[112] На этом утверждении можно на содержательном уровне сформулировать задачи, которые также должен решать контроллер запястья, которые также можно назвать как решение прямой и обратной кинематической задачи преобразования:
[113] Прямая задача - задача определения координатного описания параметров пространственного положения и ориентации хирургического инструмента по заданной совокупности значений углов поворота относительно осей вращения, полученных при помощи контроллера запястья.
[114] Обратная задача - задача построения заданной позиции ориентации запястья при помощи контроллера запястья и связанная с этим задача определения всех требуемых углов вращения.
[115] При этом должен учитываться главный принцип однозначности, что будет гарантировать однозначное положение и ориентацию хирургического инструмента при заданных направляющих командах. Конструкция контроллера запястья позволяет отслеживать положение запястья хирурга, передавать изменение ориентации в виде цифрового сигнала, отображающего изменения угла отклонения относительно осей вращения и нутации. Эти величины используются как входные данные в кинематических расчетах предполагаемого положения конца хирургического инструмента и позволяют интерпретировать данные сигналы как управляющие команды. Сама кинематика преобразования задающих углов в управляющие команды в рамках рассматриваемой заявки не рассматривается, но само понимание того, в какой форме представлять измеряемые данные, является важной деталью в контексте решаемой задачи.
[116] Контроллер запястья хирурга состоит из блока подвижной консоли и блока механизма поворота, описанных выше. На фиг. 5 представлен предпочтительный вариант реализации конструкции контроллера запястья. В частности, на фиг.5изображено крепление консолей к приводному элементу, реализующего нутационное движение контроллера запястья. В верхней части площадки 221 перпендикулярно к ней параллельно расположены две плоские пластины 227, механически соединенные с площадкой 221. К отверстиям 228 указанных пластин подсоединяется консоль.
[117] Добавление гибкой передачи 229, либо иного другого известного способа передачи, позволяет физически вынести приводной механизм 223 и измерительное средство угла поворота и механически соединить с шарнирным соединением, реализующим поворот. Такое конструкционное решение является эффективным, так как это позволяет развесить конструкцию без добавления дополнительных элементов и без кардинальных изменений механических особенностей.
[118] С противоположной стороны площадки 221 на уровне оси, проходящей через центр реализовано устройство измерения поворота и приводной элемент 224 для оси вращения. Изменение угла нутации меняет всю ориентацию конструкции контроллера запястья и активного устройства захвата относительно данной оси. Данный факт учитывается на этапе математических преобразований полученных углов, но это подтверждается и биологических строением руки человека. Так, поворот предплечья вокруг локтевого соединения поворачивает кисть, запястье и ладонь. Такой подход к полному воспроизведению и фиксации поворотов руки хирурга при проведении роботохирургической операции позволяет добиться интуитивно понятного взаимодействия с системой, что упрощает проведение хирургической операции, а также снижает порог вхождения при освоении комплекса, так как нет необходимости дополнительно обучаться управлению системой.
[119] Контроллер запястья крепится к механизму с параллельной кинематической структурой типа дельта-робот, задачей которого будет являться обеспечение по меньшей мере трех поступательных степеней свободы. Данное крепление может быть осуществлено любым известным способом крепления.
[1] В качестве приводных элементов, используемых в контроллере запястья, могут быть применены бесколлекторные моторы постоянного тока. Выбор моторов обусловлен требованиями к системе: сравнительно низкая частота вращения, большой вращающий момент, малая масса и габаритные размеры. Недостатком таких моторов является необходимость в наличии системы автоматического управления для регулирования оборотом и вращающего момента, что не является существенной сложностью в рамках описываемого решения. Преимуществами использования бесколлекторных моторов является высокая надежность и долговечность за счет отсутствия коллекторного узла, подверженного износу.
[120] Для точного определения углов поворота степеней свободы в контроллере запястья в качестве датчиков поворота были применены энкодеры, выбранные из энкодеров оптического, магнитного или иного принципа действия или в виде резистивного элемента. В предпочтительном варианте изобретения в качестве датчиков поворота используют высокоточные бесконтактные энкодеры на основе массивов датчиков Холла. На осях вращения каждой степени свободы находятся неодимовые магниты диаметральной намагниченности, вблизи которых расположены корпуса микросхем.
[121] Энкодеры данного типа обладают такими преимуществами как высокая разрешающая способность (14 бит, 0.0219 градуса), возможность цифровой установки нулевого положения, высокое быстродействие, цифровой контур статуса и диагностики.
[122] Энкодеры на основе магнитного эффекта обладают рядом особенностей эксплуатации, которые влияют на точность измерения:
- Чувствительность к шумам источника питания;
- Наличие оптимального расстояния от корпуса микросхемы до вращающегося магнита
- Чувствительность к линейному смещению оси вращения магнита.
[123] Для достижения максимальной точности и чувствительности была разработана и применена печатная плата для установки микросхемы энкодера с учетом перечисленных особенностей (фиг. 6).
[124] Точное пространственное позиционирование корпуса микросхемы относительно вращающегося магнита обеспечивается за счет крепежных отверстий 410 в печатной плате 300. Прижим печатной платы 400 к прилегающей поверхности реализуется за счет отсутствия по контуру платы 400 объемных элементов. Контактные площадки питания и данных предназначены для пайки проводов в обратную сторону от микросхемы энкодера. Стабильное напряжение питания и защита от импульсных помех обеспечивается применением двух конденсаторов в линии питания.
[125] На фиг. 6 приведен сборочный чертеж печатной платы 400 для установки цифрового магнитного энкодера. На фиг. 6 обозначено: 420 - посадочное место микросхемы энкодера, 410 - Крепежные отверстия печатной платы, 430 - контактные площадки питания и данных.
[126] В предпочтительном варианте изобретения блок управления контроллером запястья реализован на основе двух печатных плат: одна отвечает за силовую развязку и преобразование напряжения, к ней дополнительно соединены драйверы управления приводными элементами, а вторая отвечает за прием и обработку данных, полученных с измерительных устройств и взаимодействие с драйверами управления приводных элементов по заданным алгоритмам. На фиг.7 и фиг.8 изображены трехмерные модели силовой платы 500 и платы управления 600 соответственно. Конструкция печатной платы управления 600 предусматривает установку энкодера 610 на одну из ее сторон, что устраняет необходимость в использовании отдельной печатной платы энкодера для измерения угла наклона блока механизма поворота. Общий вид устройства с закрепленными платами 500, 600 на механическую плоскую площадку 221, являющейся частью контроллера запястья, представлен на фиг. 9.
[127] Контроллер запястья хирурга работает следующим образом. Хирург располагает кисть руки на корпусе устройства захвата таким образом, корпус рукоятки зажат между ладонью и пальцами. При этом возникновение усилий со стороны хирурга для возникновения нутационных движений устройства захвата (контроллера кисти), которые соответствуют повороту кисти хирурга во фронтальной плоскости вокруг одной оси, лежащей в сагиттальной плоскости, вызывает поворот вызывает поворот хирургического инструмента одной оси. А возникновение усилий со стороны хирурга для вращения устройства захвата (контроллера кисти), которое соответствует повороту лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора, вызывает вращение манипулятора с хирургическим инструментом вокруг одной оси. Указанные выше действия позволяет реализовать конструкция контроллера запястья, которая позволяет выполнять одновременно несколько действий.
[128] Также контроллер запястья используется для ведения или передачи усилий на запястье руки хирурга. Более подробно процессы, описывающие передачу управляющих команд для работы контроллера запястья как в режиме управления манипулятора с хирургическим инструментом, так и в режиме передачи усилий на запястье хирурга, описаны выше.
[129] Использование заявленной конструкции контроллера запястья позволяет увеличивать эффективность проводимых хирургических операций и обеспечивать поддержку хирургу с целью уменьшения усталости и утомляемости при проведении длительных операционных процедур.
[130] В то время как изобретение было описано в определенных примерах и показано на сопровождающих чертежах, следует понимать, что подобные воплощения являются единственно иллюстративными и не ограничивают широту изобретения и что это изобретение не ограничивается показанными и описанными определенными конструкциями и системами, поскольку могут иметь место различные другие модификации, понятные для обычных специалистов этой области.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| ТЕНЗОПЛАТФОРМА ДЛЯ РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2715400C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ РОБОТОМ | 2021 |
|
RU2775876C1 |






Изобретение относится к медицинской технике. Контроллер запястья (200) для контроллера оператора управления роботохирургическим комплексом включает блок (220) механизма поворота и блок (210) подвижной консоли. Блок механизма поворота имеет верхнюю и нижнюю части, корпус эргономичной формы и сконфигурирован для соединения с элементом, входящим в состав контроллера оператора, для обеспечения функции управления перемещением манипулятора с хирургическим инструментом по трем взаимно ортогональным осям и независимого поворота вокруг заранее заданного центра, повторяющего поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора, для обеспечения функции вращения манипулятора с хирургическим инструментом вокруг одной оси. Блок подвижной консоли представляет собой плоский незамкнутый механизм параллельной жесткой структуры, состоит из трех звеньев и трех кинематических пар и сконфигурирован для крепления с одной стороны к верхней части блока механизма поворота, а с другой к верхней части рукоятки, которая входит в состав контроллера оператора, и поворота, повторяющего поворот кисти оператора во фронтальной плоскости вокруг переднезадней оси, лежащей в сагиттальной плоскости, для обеспечения функции поворота хирургического инструмента вокруг одной оси. Внутри корпуса блока механизма поворота расположены блок управления контроллера запястья, датчик поворота (225) блока подвижной консоли, обеспечивающий электрические сигналы и передающий их на блок управления контроллера запястья, и приводной элемент (223) блока подвижной консоли. На внешней стороне корпуса блока механизма поворота расположены датчик поворота (226) блока механизма поворота, обеспечивающий электрические сигналы и передающий их на блок управления контроллера запястья, и приводной элемент (224) блока механизма поворота. Датчик поворота блока механизма поворота расположен на оси вращения приводного элемента блока механизма поворота. Блок управления контроллера запястья сконфигурирован для передачи движения блока механизма поворота и/или блока подвижной консоли в соответствующее независимое движение манипулятора с хирургическим инструментом и/или хирургического инструмента и для передачи движения манипулятора с хирургическим инструментом и/или хирургического инструмента в соответствующее независимое движение указанных блоков. Достигается усовершенствованное, более маневренное и точное управление элементом роботизированного технологического комплекса с увеличенной, эргономически удобной рабочей областью за счет использования предлагаемой архитектуры контроллера запястья со снижением статической и динамической нагрузки на запястье руки оператора во время работы и обеспечением минимальной нагрузки веса на запястье руки при управлении. 4 з.п. ф-лы, 9 ил.
1. Контроллер запястья для контроллера оператора управления роботохирургическим комплексом, включающий:
блок механизма поворота, который имеет верхнюю часть и нижнюю часть, корпус эргономичной формы, блок механизма поворота функционально сконфигурирован для
соединения с элементом, входящим в состав контроллера оператора, который предназначен для обеспечения функции управления перемещением манипулятора с хирургическим инструментом по трем взаимно ортогональным осям,
и независимого поворота вокруг заранее заданного центра, повторяющего поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора, для обеспечения функции вращения манипулятора с хирургическим инструментом вокруг одной оси;
по меньшей мере один блок подвижной консоли, который представляет собой плоский незамкнутый механизм параллельной жесткой структуры, состоящий из трех звеньев и трех кинематических пар, блок подвижной консоли функционально сконфигурирован для
крепления с одной стороны к верхней части блока механизма поворота, а с другой к верхней части рукоятки, охватываемой и удерживаемой всей поверхностью кисти оператора во время работы, которая также входит в состав контроллера оператора,
и поворота, повторяющего поворот кисти оператора во фронтальной плоскости вокруг переднезадней оси, лежащей в сагиттальной плоскости, для обеспечения функции поворота хирургического инструмента вокруг одной оси;
при этом внутри корпуса блока механизма поворота расположены
блок управления контроллера запястья,
по меньшей мере один датчик поворота блока подвижной консоли, обеспечивающий электрические сигналы, соответствующие изменению положения блока подвижной консоли относительно блока механизма поворота при повороте кисти оператора, охватывающей рукоятку, во фронтальной плоскости вокруг переднезадней оси, лежащей в сагиттальной плоскости, и передающий их на блок управления контроллера запястья,
приводной элемент блока подвижной консоли;
при этом на внешней стороне корпуса блока механизма поворота расположены
датчик поворота блока механизма поворота, обеспечивающий электрические сигналы, соответствующие изменению положения блока механизма поворота относительно заранее заданного центра при повороте лучевой кости вместе с кистью оператора вокруг локтевой кости относительно продольной оси руки оператора, и передающий их на блок управления контроллера запястья,
приводной элемент блока механизма поворота, причем датчик поворота блока механизма поворота расположен на оси вращения приводного элемента блока механизма поворота;
причем блок управления контроллера запястья функционально сконфигурирован для
передачи полученных сигналов на цифровой блок контроллера оператора и на внешнюю систему управления роботохирургическим комплексом для передачи движения блока механизма поворота и/или блока подвижной консоли в соответствующее независимое движение манипулятора с хирургическим инструментом и/или хирургического инструмента,
получения управляющих сигналов от внешней системы управления роботохирургическим комплексом и передачи их на приводной элемент блока механизма поворота и/или приводной элемент блока подвижной консоли для передачи движения манипулятора с хирургическим инструментом и/или хирургического инструмента в соответствующее независимое движение указанных блоков.
2. Контроллер запястья по п. 1, в котором корпус блока механизма поворота имеет эргономичную форму и выполнен с углублением таким образом, чтобы иметь возможность максимально приблизить корпус рукоятки, полностью охватываемой кистью оператора, и обеспечить при этом полную траекторию перемещения указанной рукоятки.
3. Контроллер запястья по п.1, в котором цифровой блок управления контроллером оператора формирует управляющие сигналы через блок управления запястья на приводной элемент блока механизма поворота и/или приводной элемент блока подвижной консоли для обеспечения поворота указанных блоков в сторону, совпадающую с поворотом кисти оператора вместе с лучевой костью вокруг локтевой кости и/или при отклонении кисти оператора в сторону локтевой кости или в сторону, противоположную повороту кисти и/или отведению кисти соответственно.
4. Контроллер запястья по п. 1, в котором в нижней части корпуса блока механизма поворота смонтирована система грузов обеспечения равновесия в статическом положении и нахождения в вертикальном положении.
5. Контроллер запястья по п.1, в котором приводной элемент блока подвижной консоли механически связан с блоком подвижной консоли при помощи гибкой передачи.
| WO 2018112227 A2, 21.06.2018 | |||
| KR 101789064 B1, 23.10.2017 | |||
| JP 6000387 B2, 28.09.2016 | |||
| US 2019000574 A1, 03.01.2019 | |||
| US 2018168758 A1, 21.06.2018 | |||
| ПОВОРОТНЫЕ ПРИВОДНЫЕ КОНСТРУКЦИИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2640002C2 |

