Изобретение относится к телеметрии, радиотехническим системам измерений, технике связи и может быть использовано для обеспечения синхронизации за минимальное время передаваемых и принимаемых сообщений и сигналов в условиях помех.
Известно [1], что на эффективность функционирования системы синхронизации комплексов телеизмерений и систем передачи данных оказывают влияние следующие факторы:
- выбранная последовательность цифровых сигналов (при двоичном коде от кодовой комбинации, составленной из символов «1» и «0»), которые используются в качестве сигналов синхронизации;
- соотношение k длительности кодовых комбинаций сигнала синхронизации (kn) к длине n кодовых комбинаций передаваемых сообщений (в телеметрических системах слов-измерений);
- отношение числа символов kn, входящих в цифровой синхросигнал к общему количеству символов двоичного кода m, определяющих цикл передачи или телеметрический кадр.
При этом особо актуальными становятся технические решения, способствующие разрешению следующих противоречий, составляющих основу многочисленных проблем повышения устойчивости приема информации в условиях помех, в том числе и организованных. Короткие цикловые синхросигналы являются наилучшими с точки зрения обеспечения минимального среднего времени обнаружения выхода из синхронизма и вхождения в него, поэтому естественным становится стремление к тому, чтобы число символов kn, которое отводится под передачу сигналов синхронизации (СС), было бы минимальным.
Однако при уменьшении числа символов kn синхросигнала увеличивается вероятность установления режима «ложного синхронизма», так как при этом увеличивается вероятность случайной или целенаправленной имитации кодовых конструкций, похожих на синхросигнал. При длинных цикловых синхросигналах (больших kn) вероятность правильного обнаружения и выделения синхросигналов повышается, однако уменьшается объем передаваемых информационных символов v в цикле или в телеметрическом кадре, определяемый соотношением v = m - kn. В условиях помех также появляются искажения, связанные со смещениями на один и более битов выделенных сигналов синхронизации относительно их истинного положения. Такая ситуация, например, появляется в том случае, когда анализируемая кодовая группа содержит часть «правильного» синхросигнала. Чаще всего, подобная ситуация может возникнуть при добавлении к истинной кодовой группе синхросигнала следующего «случайного» символа. В этом случае происходит частичное перекрытие синхросигнала. Подобные ситуации возникают и при других степенях частичного перекрытия, когда временное положение выделенного синхросигнала смещается не на один, а на несколько символов. В результате ухудшается точность установления моментов времени, соответствующих принятому сигналу синхронизации, из-за чего декодирование информационных сообщений будет неверным.
Большие потери содержательной ТМИ обуславливают необходимость разработки помехозащищенных сигналов синхронизации, сокращения времени входа в режим синхронной работы наземной аппаратуры и обеспечения контроля полноты, целостности и доступности получаемых данных телеизмерений.
Проблеме повышения помехозащищенных сигналов синхронизации посвящены следующие изобретения: [2], Способ синхронизации передаваемых сообщений и устройство для его осуществления / Патент № 2591565, опубл. 22.06.2016, бюл. №18) и [3], Способ повышения помехозащищенности синхронизации /Патент №2757975, опубл. 25.10.2021; Бюл. № 22.
Суть изобретения [2] заключается в том, что на передающей стороне в системах передачи сообщений с циклически повторяющимися пакетами данных, равной длины, и в системах телеизмерений с временным разделением каналов, формируют циклы или кадры передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из kn бит, и информационных символов, количество которых определяют соотношением v = m - kn, синхронизирующее слово наделяют свойствами, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был установлен на передающей стороне, при этом на передающей стороне синхронизирующий сигнал наделяют расширенным множеством отличительных признаков, для чего формируют его не из одной сложной псевдослучайной последовательности, представляющей собой единую кодовую конструкцию, а из нескольких составных кодовых конструкций, число которых равно трем, на приемной стороне для выделения синхронизирующих слов цифровой групповой сигнал подвергают параллельной обработке, на приемной стороне формируют признаки идентификации синхронизирующего слова на основе сравнения соответствующих полученных автокорреляционных функций в каждом из каналов с установленными порогами, значения которых выбирают в соответствии с заданными требованиями, определяемыми следующими вероятностями: обнаружения синхронизирующего сигнала в условиях помех, ложных выходов из синхронизма за счет сбоев при приеме информации, ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале, полученные результаты сравнивают с допустимым уровнем искажений. От других аналогов он отличается тем, что кодовые конструкции, из которых составлен сигнал синхронизации, выбирают равными по длине, при этом первая и третья кодовые конструкции обладают инверсно-изоморфными автокорреляционными функциями (АКФ), вторая представляет собой идеальный код Баркера, при этом используют четыре параллельных канала обработки: в первом канале определяют символьную автокорреляционную функцию для последовательно поступающих символов цифрового группового сигнала по отношению к символам идентичной копии синхрослова, хранящейся в блоке памяти на приемной стороне, сравнивают значения полученной автокорреляционной функции с установленными пороговыми уровнями, по результатам сравнения на множестве принятых символов, больших или равных 3m символам двоичного кода, помечают местоположение кандидатов в синхросигналы, выделенные кодовые последовательности кандидатов в синхросигналы делят на три составные части - кодовые конструкции равной длины и производят идентификацию каждой из них, при этом результат их идентификации определяют на основе первого признака - мажоритарного правила по большинству решений о соответствии составных частей кодовых конструкций их копиям, хранящимся в блоке памяти приемной стороны, определяют интервалы времени их повторения на множестве символов, равных или превышающих 3m, их постоянство используют в качестве второго признака идентификации синхросигнала, полученные результаты идентификации составных частей используют для подтверждения факта идентификации синхросигнала в целом и повышения его помехозащищенности, формируют признаки идентификации составных кодовых конструкций исходного синхронизирующего слова на основе сравнения соответствующих полученных автокорреляционных функций в каждом из каналов с установленными порогами, дополнительный контроль достоверности выделения синхрослов осуществляют на основе сложения взаимно-корреляционных функций выделенных составных частей - кодовых конструкций, полученные результаты сравнивают с допустимым уровнем искажений, если полученные оценки его превышают, то поиск сигнала синхронизации завершают, при противоположном результате процесс поиска сигнала синхронизации продолжают.
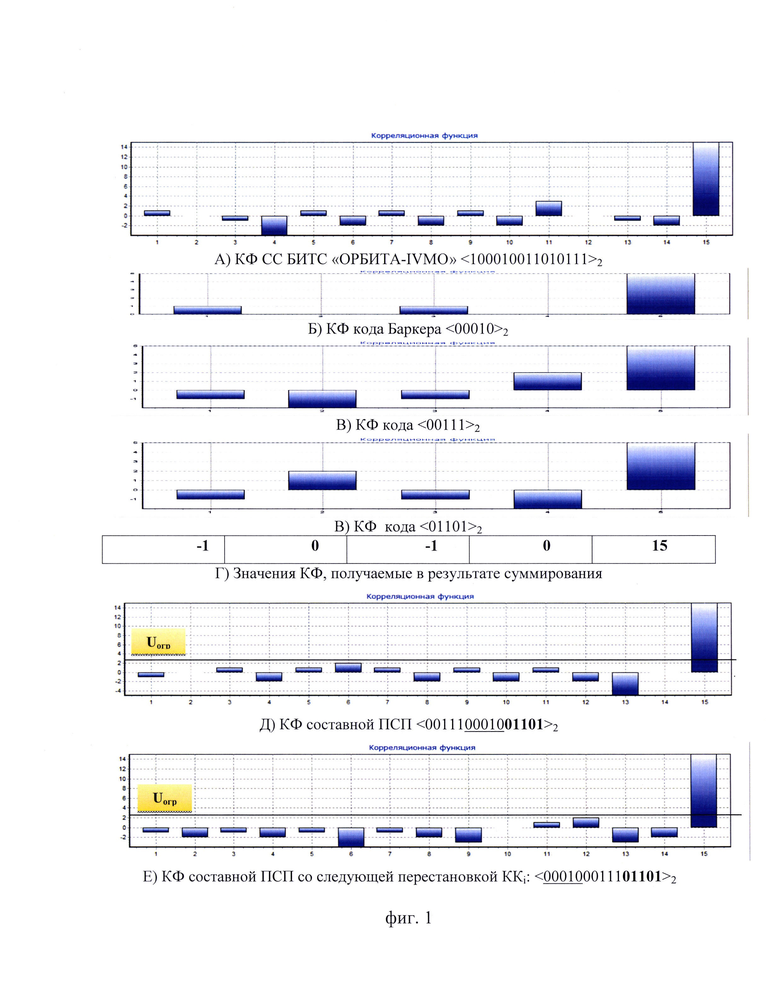
Такое решение, как показывают проведенные экспериментальные исследования, позволяют повысить эквивалентную энергетику СС на 3дБ, в результате чего существенно повышается их помехозащищенность при том же, что и ранее количестве бит, равном N = 15. При этом составные части (кодовые конструкции ККi, i = 1,2,3 (сегменты СС) были выбраны следующими: КК1 = <00111>2, КК2 = <00010>2 и КК3 = <01101>2: три по пять разрядов каждый для того, чтобы N = 3 × 5 = 15 осталось неизменным (фиг. 1).
Однако достигнутый при этом эффект также может быть недостаточным несмотря на то, что получены результаты, которые следует отнести к предельным с точки зрения.
Классическая теория помехозащищенности сложных сигналов [4,5], утверждает, что не могут быть сформированы АКФ кодовых конструкций, у которых бы боковые лепестки были бы равны нулю. Есть коды Баркера, которые называют идеальными, и только потому, что у них боковые лепестки равны либо 0, либо ± 1. Но максимальная длина кодов Баркера ограничена 13 битами (N = 13), а этого оказывается недостаточным для удовлетворения потребностей практики. Из иллюстрации, приведенной на фиг. 1(Г), следует, что при использовании изобретения [2] у суммарной АКФ основной пик равен 15, а боковые лепестки равны 0 и -1. Иначе говоря, получен такой же результат, как и у кодов Баркера, однако длина кодовой конструкции была равна 15, что боле 13 (15 - 13). И это не предел. Используя ту же идею построения пседослучайных последовательностей (ПСП), составленных их трех кодовых групп одинаковой длины и ориентируясь на код Баркера, в качестве основы для синтеза, получим максимальную длину составной конструкции, равную 13 × 3 = 39. Но и этого может быть недостаточно для совершенствования существующих систем телеизмерений и передачи данных. Но сама идея составных ПСП оказывается плодотворной, а полученные при этом результаты выходят за пределы классической теории. Используемая при этом нетрадиционное техническое решение (попросту, хитрость) заключается в том, подавление боковых лепестков осуществляют за счет суммирования АКФ составных кодовых конструкций.
Изобретение [3] отличается от [2] тем, что на приемной стороне к АКФ, которые вычислены по отдельным 3 составным кодовым конструкциям (ККi, i = 1,2,3) при их суммировании добавляют четвертую АКФ 5-тиразрядного инверсного кода Баркера. В результате такой операции основной пик суммарной АКФ увеличивают до N = 20, а боковые лепестки в виде значений -1 компенсируют за счет значения +1 инверсного кода Баркера. Однако такое решение также нельзя считать лучшим.
Также одна из попутных решаемых задач при внедрении изобретений [2,3] заключалась в том, чтобы защитить сигналы синхронизации (СС) от их подмены в условиях радиоэлектронного противоборства (РЭП). В этом смысле использование в качестве составной ККi кода Баркера определенной разрядности (N) не также является хорошим решением, так как они и их свойства достаточно хорошо известны.
Известно изобретение [4] Способ синтеза широкополосных сигналов на основе применения составных кодовых конструкций /Патент РФ №2818227, опубл. 26.04.2024, бюл. №12. Технический результат заключается в повышении структурной скрытности и помехоустойчивости широкополосных сигналов. Он также основан на применении составных кодовых конструкций, но отличается областью применения в системах широкополосной связи. Способ заключается в том, что на передающей стороне в радиотехнических системах формируют циклы или кадры передаваемой цифровой информации, каждый из которых состоит из m двоичных символов, формируют расширяющую псевдослучайную последовательность, представляющую собой единую составную кодовую конструкцию, состоящую из нескольких кодовых последовательностей, при этом кодовые последовательности выбирают равными по длине, определяемой разрядностью представления N, у которых боковые лепестки автокорреляционной функции на идентичных позициях противоположны по знаку. Способ отличается тем, что в единой составной кодовой конструкции формируют количество кодовых последовательностей К, кратное четырем, формируют инверсные и инвариантные к сдвигу кодовые последовательности для составления применяемого для передачи широкополосных сигналов полного алфавита кодовых последовательностей путем выбора последовательностей, суммарная автокорреляционная функция которых не имеет боковых лепестков, а главный максимум равен К × N, причем инвариантная к сдвигу двоичная кодовая последовательность - это последовательность, разряды которой зеркально заполняются 0 и 1 относительно исходной двоичной кодовой последовательности.
Иллюстрация предлагаемого способа представлена на фиг. 2 - 4. На фиг. 2 приведены наименьшие по разрядности представления двоичным кодом составные кодовые конструкции ККi и их апериодические автокорреляционные функции АКФi. Они симметричные относительно своего главного максимума, который также называют основных пиком, поэтому приведена только левая их часть. Из их анализа следует, что существует такое множество АКФi, когда может быть обеспечено попарное подавление боковых лепестков (БЛ). Также может быть использовано и множество апериодических автокорреляционных функций АКФi, кратное четырем (фиг. 3), что составляет основу предлагаемого изобретения.
Однако увеличение разрядности составных кодовых слов до 6 (фиг. 4) показывает, что возможность подавления при суммировании апериодических и периодических автокорреляционных функций АКФi возможно только при числе составных кодовых конструкций ККi, кратным четырем k = 4s. При этом количество периодических автокорреляционных функций АКФi всегда существенно больше по сравнению со случаем, когда определяют апериодические автокорреляционные функции АКФi.
Эта особенность хорошо просматривается на фиг. 4. Такими свойствами при определении апериодических автокорреляционных функций АКФi обладают, в чистом виде без повторений, только два набора ККi: 1) <001011>2 = <11>10; <011110>2 = <30>10; <010001>2 = <17>10; <000100>2 = <4>10; 2) <000101>2 = <5>10; <100001>2 = <35>10; <011101>2 = <20>10; <001000>2 = <8>10.
Но в то же время, как следует из иллюстрации, приведенной на фиг. 4, у периодических автокорреляционных функций АКФi, определение которых проще реализуется в технике, таких наборов ККi уже 12, в 6 раза больше. На самом деле тех и иных будет в 2 раза больше за счет того, что такими же свойствами обладают и инверсные версии ККi, приведенных на фиг. 4. Это множество дополнительно может быть также увеличено за счет инвариантной к сдвигу двоичной кодовой последовательности 6-тиразрядных ККi (N = 6). Такое свойство оказывается привлекательным для обеспечения защиты СС от их имитации. Этому также способствует отсутствие кодов Баркера и М-последовательностей, так как они наиболее широко представлены во многих технических решениях, а потому являются и хорошо известными. В этом смысле выбор 6-тиразрядных составных ККi оправдан также тем, что кодов Баркера и М-последовательностей с таким же числом разрядов не существует. Также их не существует и для N = 8, 9, 11 и 12, если ограничиваться применением кодов Баркера, у которых Nmax = 13. Однако, если пользоваться новым подходом к определению списка кандидатов в составные ККi, то возможность подавления боковых лепестков всегда есть.
Многообразие причин сбоев СС при приеме информации требует организации мониторинга искажений цифровых групповых сигналов (ЦГС). Он необходим, прежде всего, для решения следующих задач: 1) определения эффективности тех или иных принимаемых технических решений по повышению устойчивости выделения синхронизации (ССi) на фоне помех; 2) получения реальной картины искажений цифровых групповых сигналов (ЦГС), знание которой обеспечивает возможность восстановления на этапе обработки тех информационных сообщений, которые были потеряны при приеме информации в реальном масштабе времени (РМВ). Но для реализации процесса повторного обеспечения синхронной работы передатчика и приемника, в том числе в режиме отложенного времени (РОВ) при обработке цифровых групповых сигналов (ЦГС) необходимо наличие системы мониторинга работы системы синхронизации на приемной стороне.
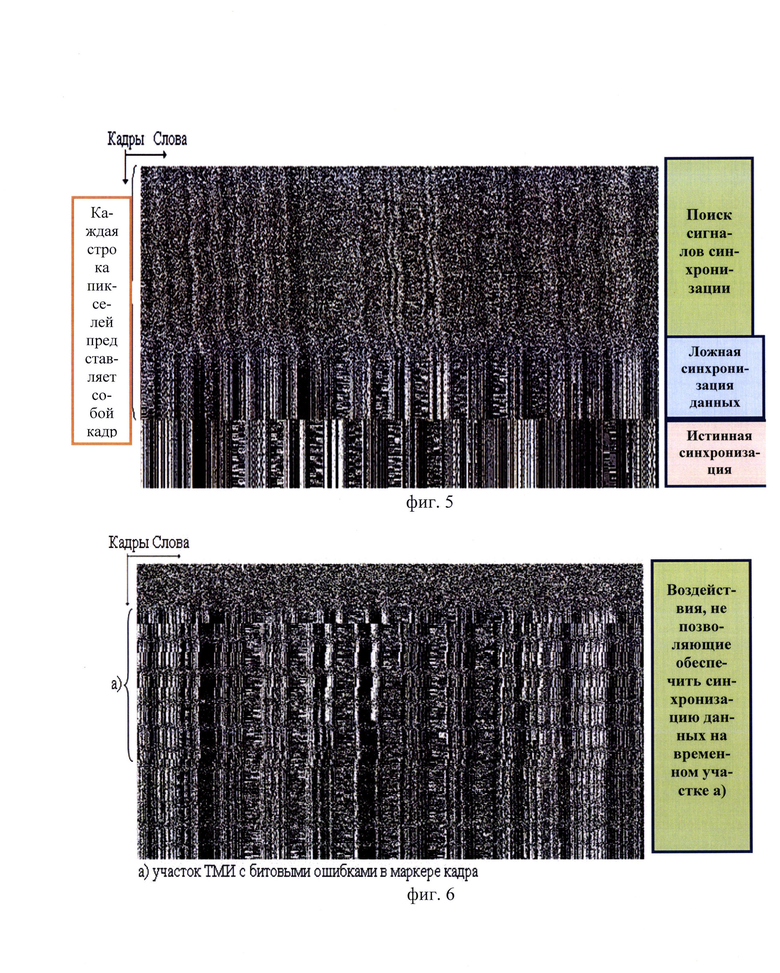
Предлагается следующий способ мониторинга. Выделенный при приеме цифровой групповой сигнал (ЦГС), представленный в двоичном коде, визуально отображают в матричной форме, в которой цикл или кадр переданной информации сформирован из пикселей (точек), принимающих, например, черный цвет там, где в ЦГС присутствовали символы двоичного кода «0», а белый - в случае, когда появлялись символы «1». Каждый следующий по времени (i +1)-ый цикл или кадр ЦГС записывают, как очередную строку матрицы пикселей. Появляющаяся при этом возможность анализа формируемых столбцов матрицы пикселей, приведенных на фиг. 5 - 8, показывает то реальное состояние, в котором приходится работать системе выделения сигналов синхронизации (ССi) и вхождения принимаемых данных и сообщений в режим синхронной работы с передающей стороной. Кроме того, на основе изображений столбцов матриц пикселей, составленных на основе точек, цвет которых черный или белый соответствует битам ЦГС, выделяют в строках из последовательности представленных бит v/µ = (m - kn)/µ передаваемых сообщений, где v - количество передаваемых информационных символов в цикле или в кадре, µ - число сообщений, содержащихся в них, а знак «/» характеризует арифметическое деление v на µ без остатка. При этом v/µ - разрядные битовые слова, данные и сообщения показывают, как они «дрейфуют» по отношению к тому их местоположению в матрице пикселей, которое становится в матрице пикселей четко определенным в результате установления режима синхронной работы приемного устройства. Так, например, на фиг. 5. вначале, когда начинается прием информации с крайне малым отношением сигнал/шум, видны такие значительные искажения бит ЦГС, которые характерны для хаоса. Однако и в этом случае система синхронизации начинает свою работу: видны волнообразные изменения структуры принимаемых данных и сообщений, объединенных в v/µ - разрядные битовые сообщения. Эти проявления структурных особенностей становятся более яркими по мере увеличения соотношения сигнал/шум, что также следуют из иллюстрации, приведенной на фиг. 5. Однако большое количество искаженных бит с высокой вероятностью может привести и к появлению режима «ложного» синхронизма принимаемых сообщений, что представлено на втором по времени участке работы системы синхронизации кадров (фиг. 5). Наконец, соотношение сигнал/шум становится таким, что ошибки, искажающие СС, уже не сказываются на устойчивости установленного режима синхронизации потока ЦГС. Эта ситуацию определяют как «истинную» синхронизацию.
На фиг. 6 представлен случай, когда режим истинной синхронизации не наступает продолжительное время, несмотря на то обстоятельство, что соотношение сигнал/шум уже превышало порог установления временного интервала «истинной» синхронизации. Причина этого, может заключаться и в преднамеренном нарушении условий, необходимых для установления «истинного» синхронизма. Поэтому разрабатываемые системы синхронизации, в том числе и та, что предлагается в изобретении в виде способа, должны быть устойчивы по отношению к такого рода негативным воздействиям. Из иллюстрации, приведенной на фиг. 6, следует, что преднамеренное нарушение условий, необходимых для установления «истинного» синхронизма, может быть связано с эффектом глушения передаваемого потока ЦГС, о чем свидетельствуют представленные на фиг. 6 временные интервалы с хаотизацией смены символов «1» и «0» двоичного кода в передаваемых v/µ - разрядных битовых сообщениях.
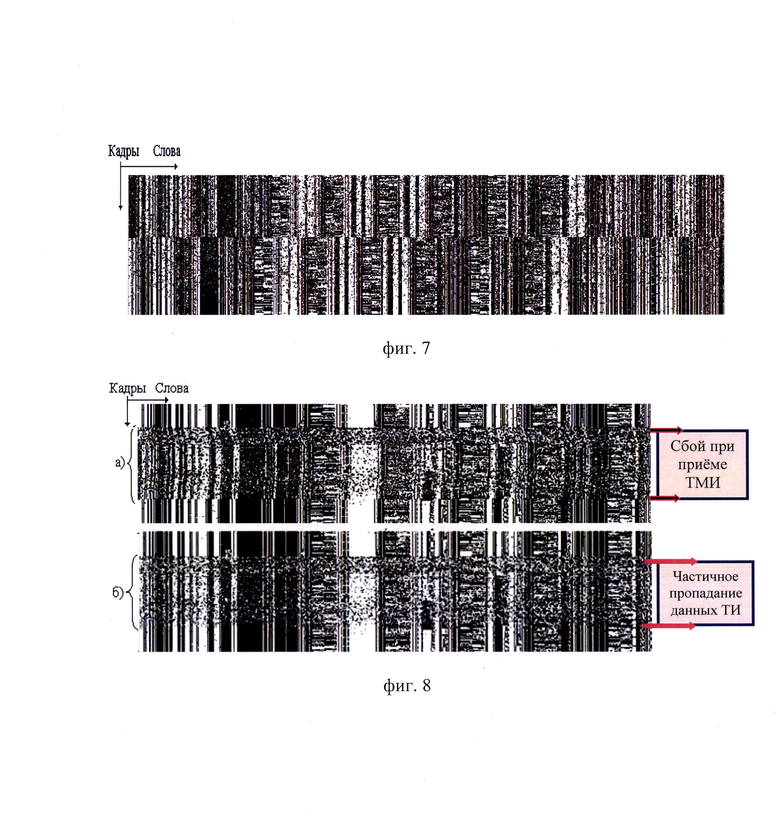
Также причинами «ложной» синхронизации могут быть вставка или потеря в кадре определенного числа бит, в результате чего восстанавливаемые ЦГС оказываются смещенными друг относительно друга на количество бит, которое соответствует вставке в цикл или кадр лишних или пропаданию переданных бит (фиг. 7). При этом вместо истинных сообщений, будут выделены ложные.
Кроме того, на фиг. 8 показан результат работы существующей системы синхронизации принимаемых ЦГС. В этом случае после нарушений условий устойчивой связи достаточно часто происходит сдвиг восстанавливаемого ЦГС на несколько символов двоичного кода (фиг. 8(А)). В этом случае режим «ложной» синхронизации оказывается скрытым - он себя явно не обнаруживает. Но его негативное проявление заключается в том, что большое количество информационных данных не удается спасти - их «выбрасывает» существующая несовершенная система синхронизации. Предлагаемая система мониторинга позволяет обнаружить факт такой деструктивной работы системы синхронизации. В этом случае возможность спасти утраченную содержательную информацию позволяет предварительная первичная обработки ЦГС (фиг. 8(Б)). Результаты внесения необходимых поправок в данные мониторинга ЦГС (фиг. 8(А)), полученных в результате предварительной первичной обработки ЦГС (фиг. 8(Б)), позволяют существенно уменьшить потери информации, вызванные сбоями системы синхронизации. Вместо одного большого сбоя, как это было ранее (фиг. 8(А)), появляются отдельные сбои, малые по длительности, которые связаны с высоким уровнем зашумления передаваемых данных помехами (фиг. 8(Б)).
Перечисленная последовательность операций позволяет сформулировать следующую формулу изобретения.
1. Способ синхронизации передаваемых сообщений и система мониторинга ее эффективности, состоящий в том, что на передающей стороне в системах передачи сообщений с циклически повторяющимися пакетами данных, равной длины, и в системах телеизмерений с временным разделением каналов, формируют циклы или кадры передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из N бит, и информационных символов, количество которых определяют соотношением v = m - N, синхронизирующее слово наделяют свойствами, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был установлен на передающей стороне, при этом на передающей стороне синхронизирующий сигнал наделяют расширенным множеством отличительных признаков, для чего формируют его не из одной сложной псевдослучайной последовательности, представляющей собой единую кодовую конструкцию, а из нескольких составных кодовых конструкций, отличающийся тем, что число k = 4s составных кодовых конструкций выбирают, кратное четырем, c разрядностью представления n двоичным кодом каждый, где s = 1,2,3,… - счетное множество, а сами k составных кодовых конструкций (ККi) формируют из заранее сформированного списка, при этом на приемной стороне для выделения синхронизирующих слов цифровой групповой сигнал подвергают обработке, но не всей N = kn кодовой конструкции слова синхронизации, в целом, а ее четырех составных частей (ККi), имеющих подобные апериодические или периодические автокорреляционные функции АКФi, в результате чего процесс поиска истинного сигнала синхронизации (СС) становится распараллеленным и одновременным с использованием четырех каналов обработки, в каждом из которых вычисляют в зависимости от наличия встроенных в приемник средств обработки ЦГС апериодическую или периодическую автокорреляционные функции (АКФi) для каждой из составных кодовых конструкций (ККi), которые затем суммируют, при этом суммарная апериодическая или периодическая автокорреляционные функции АКФ∑i при отсутствии искажений сигнала синхронизации лишена боковых лепестков, а ее главный максимум равен N = kn, на приемной стороне формируют признаки идентификации слова синхронизации на основе сравнения соответствующих полученных суммарных апериодических или периодических автокорреляционных функций АКФ∑i с установленными порогами, значения которых выбирают в соответствии с заданными требованиями, определяемыми следующими вероятностями: обнаружения синхронизирующего сигнала в условиях помех, ложных выходов из синхронизма за счет сбоев при приеме информации, ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале, полученные результаты сравнивают с допустимым уровнем искажений.
2. Способ по п. 1, отличающийся тем, что при сравнении принимаемых данных, оперирующих последовательно формируемыми множествами принятых символов, больших или равных m бит, где m - длина в битах цикла или кадра передаваемой информации, помечают местоположение кандидатов в синхросигналы, выделенные среди них кодовые последовательности с числом символов kn, предположительно входящих в состав цифрового синхросигнала, делят их на соответствующие k составные части, представляющие собой кодовые конструкции (ККi) равной длины n, и производят идентификацию каждой из них, при этом результат достоверности их идентификации определяют на основе первого признака - мажоритарного правила по большинству решений о соответствии составных частей кодовых конструкций (ККi) их копиям, хранящимся в блоке памяти приемной стороны, определяют интервалы времени их повторения на множестве восстанавливаемых на приемной стороне цифровых групповых сигналов, их постоянство используют в качестве второго признака идентификации синхросигнала, полученные результаты идентификации составных частей ККi используют для подтверждения факта идентификации синхросигнала, в целом, и повышения его помехозащищенности, дополнительный контроль достоверности выделения синхрослов осуществляют на основе сложения апериодических или периодических автокорреляционных функций АКФi выделенных составных частей, которыми являются кодовые конструкции ККi, полученные результаты сравнивают с допустимым уровнем искажений, если полученные оценки его превышают, то поиск сигнала синхронизации завершают, при противоположном результате - процесс поиска сигнала синхронизации продолжают.
3. Способ по п. 1, отличающийся тем, что выделенный при приеме цифровой групповой сигнал (ЦГС), представленный в двоичном коде, визуально отображают в матричной форме, в которой цикл или кадр переданной информации, отображают в виде точек (пикселей), принимающих, например, черный цвет там, где в цифровом групповом сигнале присутствовали символы двоичного кода «0», а белый - в случае, когда появлялись символы «1», при этом каждый следующий по времени (i + 1)-ый цикл или кадр цифровой групповой сигнал записывают, как очередную строку точек матрицы пикселей, в результате чего появляется возможность анализа формируемых столбцов матрицы пикселей - она при мониторинге показывает то реальное состояние, в котором приходится работать системе выделения сигналов синхронизации (ССi) и вхождения принимаемых данных и сообщений в режим синхронной работы с передающей стороной, при этом при отсутствии синхронной работы приемника сс передатчиком переданные и отображаемые в виде точек в матрице пикселей, объединенных в группы с числом символов двоичного кода v/µ = (m - kn)/µ, где v - количество передаваемых информационных символов в цикле или в кадре, µ - число сообщений, содержащихся в них, а знак «/» характеризует арифметическое деление v на µ без остатка, «дрейфуют» с течением времени по отношению к тому их истинному местоположению, которое становится четко определенным в результате установления режима синхронной работы приемного устройства, временные интервалы, на которых видны такие картины «дрейфа» отображаемых бит-точек в матрице пикселей, помечают, а полученную информацию о них используют для уменьшения продолжительности сбоев при приеме информации при повторном формировании условий синхронной работы передатчика и приемника в отложенном времени - при обработке данных о принимаемой структуре циклов и кадров в воспроизводимом ЦГС.
Сущностные характеристики предлагаемого способа заключаются в следующем:
- в дополнительном повышении эквивалентной (кажущейся) энергетики бит сигнала синхронизации по отношению к аналогичному показателю информационных символов «1» и «0» двоичного кода, в среднем, на 5 дБ при сохранении неизменными следующих данных: исходной разрядности синхрослова, времени входа в режим синхронной работы передающей и приемной сторон;
- в новой возможности использования сигнала синхронизации для повышения устойчивости работы канала связи и передачи дополнительной, в том числе и сервисной, информации.
Передача информации, как дополнительная функция, которая появляется при выделении сигнала синхронизации, может быть обеспечена, как за счет кодовых конструкций ККi, i = 1,2,3,4, которые являются инверсными по отношению к исходному варианту их выбора, так и инвариантных к сдвигу символов двоичных символов в ККi. Также для передачи дополнительной информации и обеспечения скрытности передачи сигналов синхронизации ССi используют свойство независимости результатов суммирования АКФi при перестановке в ЦГС местами кодовых конструкций ККi, i = 1,2,3,4.
Требование одновременного решения не одной, а нескольких задач составляет основу построения современных адаптивных систем телеизмерений. Его реализация, например, способствует разрешению множества существующих противоречий в развитии информационно-телеметрического обеспечения (ИТО) испытаний и штатной эксплуатации (ШЭ) ракетно-космической техники (РКТ). Следовательно, в предлагаемом способе также учтены системообразующие принципы построения перспективных адаптивных систем передачи информации.
Таким образом, основной технический эффект заключается в повышении помехоустойчивости выделения сигналов синхронизации в приемно-регистрирующих системах и станциях за минимальное время.
Новизна предлагаемого способа заключена также и в организации обработки сигнала синхронизации при его приеме на фоне помех.
Технический эффект у предлагаемого способа проявляется в том, что результирующая АКФ∑i, получаемая в результате суммирования АКФi составных частей ПСП, обладает свойствами, которые не могут быть получены при использовании существующих методов их синтеза, о чем свидетельствуют монографии [5,6] и патент на изобретение [4].
Литература
1. Современная телеметрия в теории и на практике / Учебный курс», Спб.: Наука и Техника, 2007. - 672с (с. 469).
2. Способ синхронизации передаваемых сообщений и устройство для его осуществления / Патент РФ № 2591565, опубл. 22.06.2016, бюл. №18).
3. Способ повышения помехозащищенности синхронизации /Патент РФ №2757975, опубл. 25.10.2021; Бюл. № 22.
4. Способ синтеза широкополосных сигналов на основе применения составных кодовых конструкций /Патент РФ №2818227, опубл. 26.04.2024, бюл. №12.
5. Свердлик М.Б. Оптимальные дискретные сигналы. - М.: Сов. Радио, 1975. - 200с.
6. Шумоподобные сигналы в системах передачи информации /Под ред. проф. В.Б. Пестрякова. - М.: «Сов. радио», 1973.- 424с (с. 129).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ | 2021 |
|
RU2792591C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2591565C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ СИГНАЛОВ СИНХРОНИЗАЦИИ | 2019 |
|
RU2757975C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ | 2012 |
|
RU2538281C2 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ И АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2021 |
|
RU2841083C2 |
| Способ синтеза широкополосных сигналов на основе применения составных кодовых конструкций | 2023 |
|
RU2818227C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ЗАМЕЩАЮЩЕГО ЛОГИЧЕСКОГО ТРОИЧНОГО ПОМЕХОУСТОЙЧИВОГО КОДА | 2019 |
|
RU2724794C1 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО СЖАТИЯ ДАННЫХ ДЛЯ ПЕРЕДАЧИ И ХРАНЕНИЯ ИНФОРМАЦИИ | 2021 |
|
RU2840261C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ РАСШИРЕННОГО ЛОГИЧЕСКОГО ТРОИЧНОГО ПОМЕХОУСТОЙЧИВОГО КОДА В РЕЖИМАХ УЗКОПОЛОСНОЙ И ШИРОКОПОЛОСНОЙ СВЯЗИ | 2023 |
|
RU2834404C2 |


Изобретение относится к способам передачи информации. Технический результат состоит в обеспечении помехозащищенности передачи сигналов синхронизации и повышении оперативности установления режима синхронной работы. Для этого предложен способ синхронизации передаваемых сообщений, состоящий в том, что на передающей стороне формируют циклы или кадры передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из N бит и информационных символов, количество которых определяют соотношением ν=m-N, синхронизирующее слово наделяют признаками, позволяющими на приемной стороне отличить его от других сообщений на фоне помех, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был установлен на передающей стороне, при этом на передающей стороне синхронизирующий сигнал формируют из нескольких составных кодовых конструкций, причем используют в качестве слов синхронизации составные широкополосные сигналы и их корреляционную обработку и согласованную фильтрацию при приеме. 2 з.п. ф-лы, 8 ил.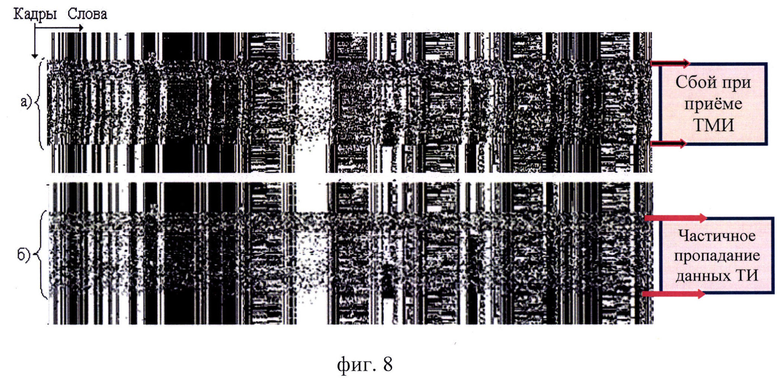
1. Способ синхронизации передаваемых сообщений, состоящий в том, что на передающей стороне в системах передачи сообщений с циклически повторяющимися пакетами данных, равной длины, и в системах телеизмерений с временным разделением каналов формируют циклы или кадры передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из N бит, и информационных символов, количество которых определяют соотношением ν=m-N, синхронизирующее слово наделяют признаками, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был установлен на передающей стороне, при этом на передающей стороне синхронизирующий сигнал наделяют расширенным множеством отличительных признаков, для чего формируют его не из одной сложной псевдослучайной последовательности, представляющей собой единую кодовую конструкцию, а из нескольких составных кодовых конструкций, отличающийся тем, что число k=4s составных кодовых конструкций выбирают, кратное четырем, с разрядностью представления n двоичным кодом каждый, где s=1, 2, 3, … - счетное множество, а сами k составных кодовых конструкций (ККi) формируют из заранее сформированного списка, при этом на приемной стороне для выделения синхронизирующих слов цифровой групповой сигнал подвергают обработке, но не всей N=kn кодовой конструкции слова синхронизации, в целом, а ее четырех составных частей (ККi), имеющих подобные апериодические или периодические автокорреляционные функции (АКФi), в результате чего процесс поиска истинного сигнала синхронизации (СС) становится распараллеленным и одновременным с использованием четырех каналов обработки, в каждом из которых вычисляют в зависимости от наличия встроенных в приемник средств обработки цифрового группового сигнала (ЦГС) апериодическую или периодическую автокорреляционные функции (АКФi) для каждой из составных кодовых конструкций (ККi), которые затем суммируют, при этом суммарная апериодическая или периодическая автокорреляционные функции (АКФΣi) при отсутствии искажений сигнала синхронизации лишена боковых лепестков, а ее главный максимум равен N=kn, на приемной стороне формируют признаки идентификации слова синхронизации на основе сравнения соответствующих полученных суммарных апериодических или периодических автокорреляционных функций (АКФΣi) с установленными порогами, значения которых выбирают в соответствии с заданными требованиями, определяемыми следующими вероятностями: обнаружения синхронизирующего сигнала в условиях помех, ложных выходов из синхронизма за счет сбоев при приеме информации, ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале, полученные результаты сравнивают с допустимым уровнем искажений.
2. Способ по п. 1, отличающийся тем, что при сравнении принимаемых данных, оперирующих последовательно формируемыми множествами принятых символов, больших или равных m бит, где m - длина в битах цикла или кадра передаваемой информации, помечают местоположение кандидатов в синхросигналы, выделенные среди них кодовые последовательности с числом символов kn, предположительно входящих в состав цифрового синхросигнала, делят их на соответствующие k составные части, представляющие собой кодовые конструкции (ККi) равной длины n, и производят идентификацию каждой из них, при этом результат достоверности их идентификации определяют на основе первого признака - мажоритарного правила по большинству решений о соответствии составных частей кодовых конструкций (ККi) их копиям, хранящимся в блоке памяти приемной стороны, определяют интервалы времени их повторения на множестве восстанавливаемых на приемной стороне цифровых групповых сигналов, их постоянство используют в качестве второго признака идентификации синхросигнала, полученные результаты идентификации составных частей ККi используют для подтверждения факта идентификации синхросигнала, в целом, и повышения его помехозащищенности, дополнительный контроль достоверности выделения синхрослов осуществляют на основе сложения апериодических или периодических автокорреляционных функций АКФi выделенных составных частей, которыми являются кодовые конструкции ККi, полученные результаты сравнивают с допустимым уровнем искажений, если полученные оценки его превышают, то поиск сигнала синхронизации завершают, при противоположном результате - процесс поиска сигнала синхронизации продолжают.
3. Способ по п. 1, отличающийся тем, что выделенный при приеме цифровой групповой сигнал (ЦГС), представленный в двоичном коде, визуально отображают в матричной форме, в которой цикл или кадр переданной информации, отображают в виде точек (пикселей), принимающих, например, черный цвет там, где в цифровом групповом сигнале присутствовали символы двоичного кода «0», а белый - в случае, когда появлялись символы «1», при этом каждый следующий по времени (i+1)-й цикл или кадр цифровой групповой сигнал записывают как очередную строку точек матрицы пикселей, в результате чего появляется возможность анализа формируемых столбцов матрицы пикселей - она при мониторинге показывает то реальное состояние, в котором приходится работать системе выделения сигналов синхронизации (CCi) и вхождения принимаемых данных и сообщений в режим синхронной работы с передающей стороной, при этом при отсутствии синхронной работы приемника с передатчиком переданные и отображаемые в виде точек в матрице пикселей, объединенных в группы с числом символов двоичного кода ν/μ=(m-kn)/μ, где ν - количество передаваемых информационных символов в цикле или в кадре, μ - число сообщений, содержащихся в них, а знак «/» характеризует арифметическое деление ν на μ без остатка, «дрейфуют» с течением времени по отношению к тому их истинному местоположению, которое становится четко определенным в результате установления режима синхронной работы приемного устройства, временные интервалы, на которых видны такие картины «дрейфа» отображаемых бит-точек в матрице пикселей, помечают, а полученную информацию о них используют для уменьшения продолжительности сбоев при приеме информации при повторном формировании условий синхронной работы передатчика и приемника в отложенном времени - при обработке данных о принимаемой структуре циклов и кадров в воспроизводимом цифровом групповом сигнале (ЦГС).
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ СИГНАЛОВ СИНХРОНИЗАЦИИ | 2019 |
|
RU2757975C2 |
| Способ кодовой цикловой синхронизации с мягкими решениями | 2017 |
|
RU2664409C1 |
| Способ устойчивой кодовой цикловой синхронизации при применении жестких решений | 2022 |
|
RU2784953C1 |
| US 7650523 B2, 19.01.2010. | |||

