Изобретение относится к области морской техники и может быть использовано для навигационного оборудования морских районов и обеспечения безопасности кораблевождения и определения координат в море надводных кораблей, судов, подводных лодок и подводных аппаратов.
Навигационное оборудование морского района представляет собой систему специальных береговых и плавучих сооружений, конструкций и устройств, предназначенных для обеспечения безопасности кораблевождения (судовождения) и служит для определения координат кораблей и судов в море, их правильной ориентировки во время плавания в прибрежных и мелководных районах. Средствами навигационного оборудования служат береговые и плавучие маяки, светящиеся и несветящиеся знаки, навигационные огни, плавучие предостерегающие знаки (буи и вехи), радио-, радиолокационные и гидроакустические маяки, наземные станции радионавигационных систем и другие средства [Военно-морской словарь/Гл. ред. В.Н. Чернавин. М: Воениздат, 1989. - 511 с. С. 265].
Наиболее сложным является обеспечение безопасности плавания и правильной ориентировки под водой подводных плавсредств (подводных лодок и подводных аппаратов), так как большая часть средств навигационного оборудования установлена на поверхности воды или на берегу. Поэтому для подводных плавсредств находят применение гидроакустические маяки (ГАМ).
Известен донный ГАМ, устанавливаемый на морском дне на глубинах до 6000 м, способный обеспечить навигационными параметрами подводные плавсредства практически во всех районах Мирового океана. Дальность действия такого маяка достигает 20-25 км. [И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с. С. 292].
Устройство донного ГАМ включает: акустическую антенну с цилиндрическим или стержневым пьезокерамическим преобразователем; дежурный канал маяка, состоящий из приемного усилителя и дешифратора; электронную аппаратуру маяка, размещаемую в прочном корпусе; глубоководный поплавок для подъема антенны над грунтом; источник питания в одном прочном корпусе с электронной аппаратурой, выполняющим функцию якоря; съемного кожуха, внутри которого размещена бухта кабеля с тросом, соединяющим антенну и прочный корпус; тормозного устройства в нижней части прочного корпуса в виде амортизирующего гофрированного цилиндра, необходимое для предохранения маяка от повреждений при ударе о скалистый грунт. Отделение поплавка с антенной от прочного корпуса и переход его в дежурный режим происходит после сбрасывания маяка в воду при достижении им определенной глубины. [И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с. С. 302-304].
Донный ГАМ является одноразовым и может быть использован в качестве средства навигационного оборудования только в том районе, где был установлен. Это ограничивает его функциональные возможности и является недостатком.
Известен всплывающий донный ГАМ, который может быть использован повторно. Он имеет всплывающую часть с антенной и контейнером с электронной аппаратурой, якорь и узел крепления всплывающей части к якорю с резаком и пиропатроном. По команде или по истечении заданного времени нахождения на грунте срабатывает пиропатрон, резак обрезает кабель электронной аппаратуры, связывающий ее с источником питания, расположенным в якоре, антенна и контейнер с электронной аппаратурой маяка всплывают на поверхность, где их поднимают из воды для дальнейшего использования. Длительность работы маяка ограничивается временем действия его источника питания и составляет 10-30 суток [И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с. С. 305-306].
У данного ГАМ технически сложная и наиболее ценная его часть может использоваться неоднократно, в отличие от одноразового ГАМ, но оперативность ее повторного применения остается невысокой вследствие необходимости укомплектования ГАМ новым якорем и источником питания. В результате увеличивается время на установку ГАМ и на навигационное оборудование района в целом.
Известен гидроакустический буй-маяк (ГАБМ) с аппаратурой спутниковой связи «Гонец-Д1М» и навигации ГЛОНАСС, принятый за прототип изобретения и входящий в состав подводной системы навигации и связи «Позиционер», разработанной Санкт-Петербургским концерном «Океанприбор» и включающей пункт управления и связанные с ним автономные необитаемые подводные аппараты (АНПА) и указанный выше ГАБМ [Д. Литовкин, А. Рамм. В России создан подводный ГЛОНАСС. М.: Известия IZ, 08.12.2016. https//iz.ru/news/650211].
АНПА патрулируют заданный морской район на глубинах до 8 км и ориентируются при этом по данным ГАБМ, заранее установленных на дне и имеющих сверхточные координаты. ГАБМ передают навигационную информацию плавсредствам, находящимся не только в воде, но и на ее поверхности. ГАБМ, входящие в состав системы «Позиционер», бывают донные, плавающие и вмораживаемые в лед. Общее устройство ГАБМ включает аппаратную часть, радио- и гидроакустическую часть и систему электропитания, размещаемые в пластмассовом корпусе. В состав радио- и гидроакустической части ГАБМ входят ультракоротковолновая радиостанция, приемник ГЛОНАСС, комплект системы спутниковой связи «Гонец-Д1М» и аппаратура подводной связи с АНПА. Донный вариант ГАБМ оборудуется якорем, в дрейфующем варианте аппаратная часть размещается в защитном корпусе с поплавками и дополнительными элементами питания, а вмораживаемый ГАБМ имеет специальный высокопрочный термоконтейнер с высокой термоизоляцией.
Гидроакустический буй-маяк, принятый за прототип изобретения, при работе с АНПА имеет следующие режимы:
- «запросный», когда по запросу АНПА буй передает ему по гидроакустическому каналу связи информацию, полученную по спутниковому каналу связи;
- «диалоговый», когда буй связывает в режиме реального времени пункт управления с АНПА, используя свой радиоканал УКВ-диапазона и обеспечивает при этом контроль местонахождения АНПА и управление им;
- «автономный», при котором АНПА уточняет у буя по гидроакустическому каналу связи свои координаты и действует самостоятельно;
- «аварийный», служащий для передачи сигнала бедствия от АНПА.
Главным недостатком ГАМ и ГАБМ при использования их в составе существующих систем навигации и связи является отсутствие мобильности, что не позволяет при необходимости оперативно осуществлять навигационное оборудование районов.
Мобильность гидроакустического маяка или ГАБМ может быть обеспечена любым надводным или подводным плавсредством, при этом подводные плавсредства меньше зависят от погодных условий и действуют более скрытно, поэтому более предпочтительны. С учетом небольших размеров ГАБМ наиболее подходящим средством для его доставки в заданный район является подводный аппарат. Подводные аппараты, применяемые ведущими морскими державами, имеют различную конструкцию и подразделяются на обитаемые (ОПА) и необитаемые подводные аппараты (НПА), автономные (АНПА) и дистанционно управляемые (ДУПА). С учетом вышеизложенного, подводные аппараты являются наиболее подходящими транспортировщиками ГАБМ в морские районы для их навигационного оборудования и создания временных мобильных гидроакустических систем подводной навигации. Типовой АНПА имеет корпус обтекаемой цилиндрической или иной формы, средства движения и энергообеспечения, гидроакустические и телевизионные средства поиска, навигационное оборудование, средства связи, отсек для полезной нагрузки и приборы управления. Для связи с пунктом управления он оборудуется аппаратурой связи с гидроакустическим или радиотехническим каналом [Сиденко К.С, Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008].
АНПА находят применение в подводных поисковых работах, обнаружении, идентификации и уничтожении морских мин, в проведении гидроакустических, гидрографических и батиметрических измерений, в обследовании морских районов и подводных гидротехнических сооружений [И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение, 2013, №5. С. 79-88]. Как видно, АНПА способны выполнять различные функции, однако в качестве средств навигационного оборудования районов они применения не нашли.
Технической задачей группы изобретений является разработка мобильного гидроакустического буя-маяка и способа навигационного оборудования морского района, необходимых для ускорения навигационного оборудования района и повышения качества работы в нем своих плавсредсв за счет обеспечения их точными навигационными параметрами для выполнения маневров, повышения безопасности плавания и сокращения работного времени.
Для достижения цели изобретения предлагается мобильный гидроакустический буй-маяк, имеющий источник тока, аппаратуру управления, всплывающий поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС и аппаратурой приема и излучения гидроакустических сигналов. Мобильный гидроакустический буй-маяк размещается в отдельном модуле автономного необитаемого подводного аппарата, имеющего бортовую систему управления, устройства связи и навигации, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями. Дополнительно модуль оборудуется устройством отделения всплывающего поплавка от подводного аппарата и возвращения его обратно с приводом и катушкой с кабелем, связывающим приемник спутниковой системы навигации, расположенной в поплавке, с аппаратурой управления буя, а также устройством распознавания сигналов запроса своих сил для разрешения передачи запрашиваемой ими информации, шифратором, преобразующим информацию для предотвращения ее восстановления в случае перехвата посторонними объектами и дешифратором, осуществляющим обратное преобразование информации, вычислительным устройством и датчиками гидростатического и гидродинамического давления, служащими для расчета скорости дрейфа мобильного гидроакустического буя-маяка при его покладке на грунт, направления и величины горизонтального сноса поплавка относительно точки постановки.
Действие мобильного гидроакустического буя-маяка показано на фиг. 1 и 2:
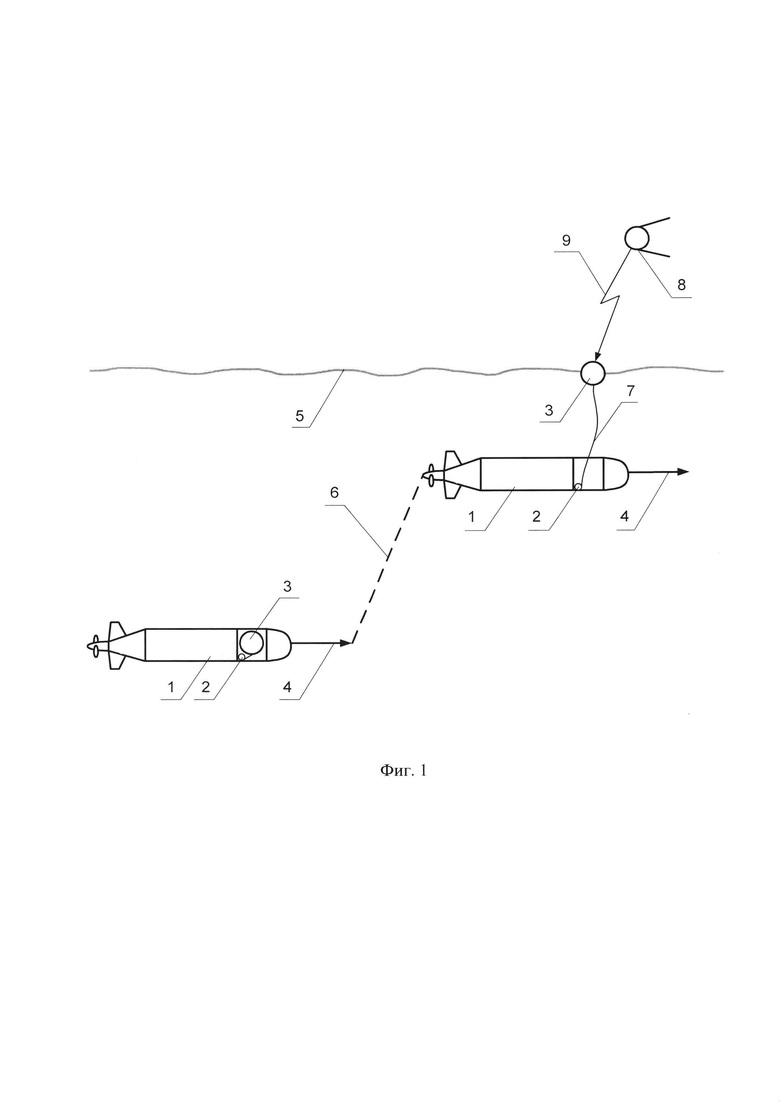
фиг. 1 - получение мобильным гидроакустическим буем-маяком географических координат от космического аппарата в заданной точке,
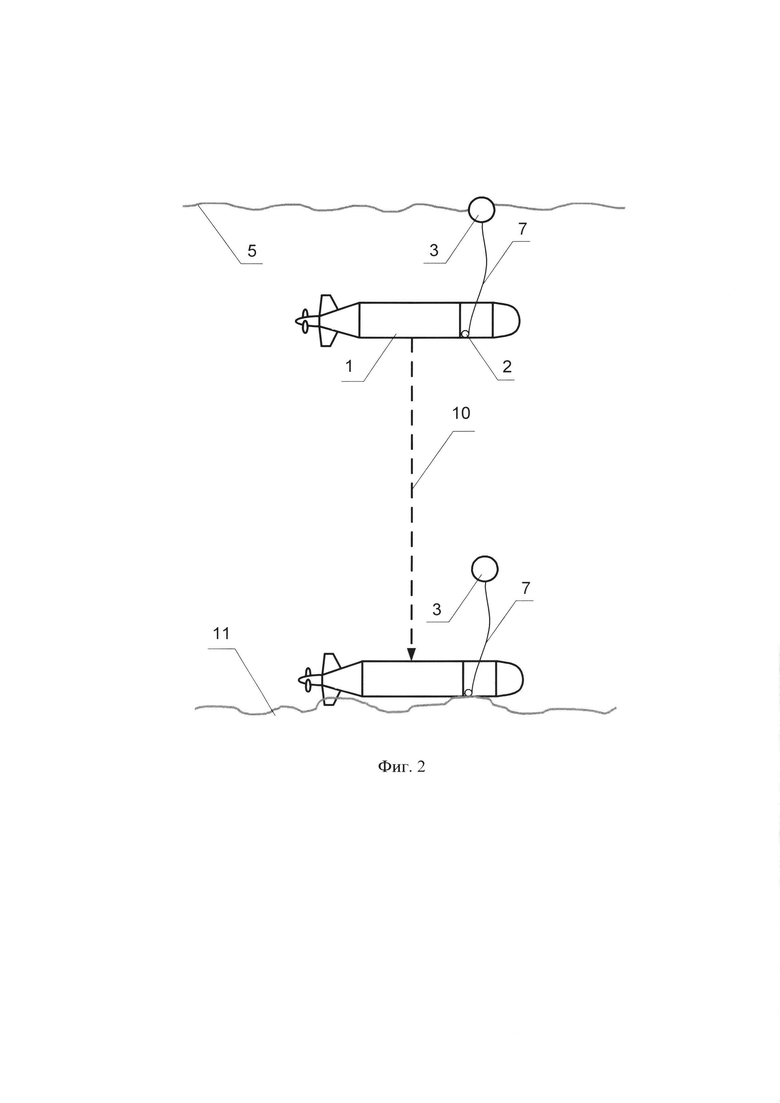
фиг. 2 - приведение мобильного гидроакустического буя-маяка в рабочее положение.
На фиг. 1 проиллюстрировано получение географических координат мобильного гидроакустического буя-маяка от космического аппарата после его прибытия в заданную точку. Цифрами обозначены: 1 - мобильный гидроакустический буй-маяк, 2 - катушка с кабелем устройства отделения и возвращения поплавка, 3 - поплавок с антенной, 4 - вектор скорости мобильного гидроакустического буя-маяка, 5 - поверхность моря, 6 - траектория всплытия мобильного гидроакустического буя-маяка, 7 - кабель, связывающий электронную аппаратуру поплавка с системой управления мобильного гидроакустического буя-маяка, 8 - космический аппарат спутниковой навигационной системы, 9 - информация, передаваемая с космического аппарата на мобильный гидроакустический буй-маяк.
На фиг. 2 изображено приведение мобильного гидроакустического буя-маяка в рабочее положение. Цифрами обозначены: 1 - мобильный гидроакустический буй-маяк, 2 - катушка с кабелем устройства отделения и возвращения поплавка, 3 - поплавок с антенной, 5 - поверхность моря, 7 - кабель, связывающий электронную аппаратуру поплавка с системой управления мобильного гидроакустического буя-маяка, 10 - траектория погружения мобильного гидроакустического буя-маяка, 11 - морское дно.
Мобильный гидроакустический буй-маяк работает следующим образом.
С прибытием мобильного гидроакустического буя-маяка (1) в точку с заданными координатами, которые были введены в его бортовую систему управления, он занимает установленную глубину и ложится в дрейф. С помощью устройства отделения от его корпуса отделяется поплавок с антенной (3) и всплывает на поверхность (5), выходит на связь с космическим аппаратом (8) спутниковой навигационной системы и определяет свои текущие координаты, которые по проводной линии связи (7) поступают в систему управления буя-маяка. После определения своего местоположения буй-маяк (1) осуществляет покладку на грунт (11) и с помощью устройства отделения и возвращения поплавка (2) устанавливает заданную длину кабеля между поплавком с антенной (3) и буем (1). С занятием исходного положения мобильный гидроакустический буй-маяк (1) переходит в дежурный режим работы. С учетом показаний датчиков гидростатического и гидродинамического давления, длины кабеля (7) поплавка с антенной (3) и глубины погружения подводного аппарата (1), в вычислительном устройстве рассчитываются истинные географические координаты поплавка-антенны (3) мобильного гидроакустического буя-маяка (1), которые передаются потребителям в составе массива навигационной информации. По команде с пункта управления, транслируемой по звукоподводной связи плавсредством или другим ретранслятором, мобильный гидроакустический буй-маяк (1) выбирает кабель (7) с поплавком с антенной (3) на борт и меняет свою позицию, переходя в другой назначенный район.
Техническим результатом изобретения является мобильный гидроакустический буй-маяк, служащий для оперативного навигационного оборудования морского района и обеспечения действующих в районе плавсредств требуемыми навигационными параметрами в течение заданного времени и точными координатами, необходимыми для правильной ориентировки в районе, безопасности плавания и выполнения работ.
Известен способ навигационного оборудования морского района в целях обеспечения в нем безопасности кораблевождения (судовождения), определения координат кораблей и судов и их правильной ориентировки во время плавания, при котором заблаговременно оснащают заданный морской район средствами навигационного оборудования, включающими береговые и плавучие маяки, светящиеся и несветящиеся знаки, навигационные огни, плавучие предостерегающие знаки (буи и вехи), радио-, радиолокационные и гидроакустические маяки, наземные станции радионавигационных систем [Военно-морской словарь/Гл. ред. В.Н. Чернавин. М: Воениздат, 1989. - 511 с. С. 265].
Способ подразумевает оснащение заранее выбранного морского района необходимым для безопасности плавания оборудованием. При этом средства навигационного оборудования устанавливаются в районе стационарно и в случае необходимости не могут быть демонтированы и переустановлены в прилегающем или отдаленном районе.
Известен способ навигационного оборудования морского района гидроакустическими буями-маяками подводной системы навигации и связи «Позиционер» [Д. Литовкин, А. Рамм. В России создан подводный ГЛОНАСС. М.: Известия IZ, 08.12.2016, https//iz.ru/news/650211], взятый за прототип изобретения, осуществляемый для обеспечения безопасности плавания в районе и снабжения плавсредств навигационными параметрами, при котором рассчитывают количество гидроакустических буев-маяков, необходимых для навигационного оборудования заданного морского района и определяют точки их установки, готовят на базе гидроакустические буи-маяки к установке, проверяют их работоспособность и загружают на плавсредство, доставляют их в заданный морской район и в расчетных точках сбрасывают в воду, после приводнения переводят гидроакустические буи-маяки в рабочее положение, при этом у стационарных буев отделяют якорь, разматывают буйреп и устанавливают его на грунте, оставляя поплавок буя, также как и дрейфующего буя, на поверхности воды, включают радиостанцию, приемник спутниковой системы навигации, комплект спутниковой связи и аппаратуру звукоподводной связи, получают от спутниковой системы навигации географические координаты буя и по запросу надводных или подводных плавсредств передают их по радио или звукоподводной связи.
Способ применяется для оснащения необходимым оборудованием заранее выбранного морского района. Дополнительное оснащение прилегающего или отдаленного района возможно при использовании дрейфующих буев, которые плавсредству необходимо найти, поднять на борт, подготовить к повторному использованию и доставить в новый район. Достаточно быстро это сделать невозможно, поэтому данный способ не позволяет оперативно оснащать морские районы навигационными средствами.
Технической задачей изобретения является разработка способа навигационного оборудования морского района, повышающего скорость навигационного оборудования, а также качество и безопасность работы в нем своих плавсредсв.
Цель изобретения достигается тем, что предлагается способ навигационного оборудования морского района, при котором рассчитывают количество гидроакустических буев-маяков, необходимых для навигационного оборудования заданного морского района и определяют точки их установки, готовят на базе гидроакустические буи-маяки к установке, проверяют их работоспособность и загружают на плавсредство, доставляют их в заданный морской район и в расчетных точках сбрасывают в воду, после приводнения переводят гидроакустические буи-маяки в рабочее положение, при этом у стационарных буев отделяют якорь, разматывают буйреп и устанавливают его на грунте, оставляя поплавок с антенной, также как и у дрейфующего буя, на поверхности воды, включают радиостанцию, приемник спутниковой системы навигации, комплект спутниковой связи и аппаратуру звукоподводной связи, получают от спутниковой системы навигации географические координаты буя и по запросу надводных или подводных плавсредств передают их по радио или звукоподводной связи. Используют мобильные гидроакустические буи-маяки, выполненные на базе автономных необитаемых подводных аппаратов, вводят в их бортовую систему управления маршрутное задание, готовят к пуску и выпускают с плавсредства или летательного аппарата, осуществляют движение одного и более мобильных гидроакустических буев-маяков по заданному маршруту на заданной глубине в расчетную или заданную для каждого из них точку, в процессе своего развертывания в заданный район они используют звукоподводную связь, средства подводного наблюдения и действуют в группе согласованно, на участке перехода, а также в расчетной или заданной точке отделяют от подводного аппарата поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС и аппаратурой приема и излучения гидроакустических сигналов, разматывают соединяющий кабель и поднимают поплавок с антенной на поверхность воды, получают от спутниковой системы навигации координаты всплывшего поплавка и рассчитывают в вычислительном устройстве по известной глубине и смещению от подводного аппарата его географические координаты, осуществляет покладку мобильного гидроакустического буя-маяка на грунт и с помощью устройства отделения и возвращения поплавка устанавливает заданную длину кабеля между поплавком с антенной и буем, с учетом показаний датчиков гидростатического и гидродинамического давления, длины кабеля поплавка с антенной и глубины погружения автономного необитаемого подводного аппарата, в вычислительном устройстве рассчитывают истинные географические координаты поплавка с антенной мобильного гидроакустического буя-маяка и переводят его в дежурный режим работы, передают на действующие в районе свои надводные или подводные плавсредства или другие потребители по их запросу координаты и дистанцию до буя-маяка, рассчитываемую в вычислительном устройстве по отрезку времени между запросом и ответом с учетом известной скорости распространения звука в воде, по команде с пункта управления, транслируемой по звукоподводной связи прибывшим плавсредством или другим ретранслятором, сбрасываемым в районе, например, с летательного аппарата, выбирают кабель с поплавком и антенной на борт мобильного гидроакустического буя-маяка и меняют его позицию, переходя в другой район.
Техническим результатом группы изобретений является разработка мобильного гидроакустического буя-маяка и способа навигационного оборудования морского района, необходимых для ускорения навигационного оборудования района и повышения качества работы в нем своих плавсредсв за счет обеспечения их точными навигационными параметрами для выполнения маневров, повышения безопасности плавания и сокращения работного времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| АКУСТИЧЕСКИЙ РЕФЛЕКТОР МОБИЛЬНЫЙ | 2020 |
|
RU2755751C1 |
| Способ позиционирования самоходного необитаемого подводного аппарата, выполняющего мониторинг подводной акватории | 2022 |
|
RU2794555C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| Способ определения координат быстроходного подводного аппарата с использованием эффекта Доплера | 2020 |
|
RU2737166C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
Группа изобретений относится к области морской техники для навигационного оборудования морских районов и обеспечения безопасности кораблевождения, и определения координат в море надводных кораблей, судов, подводных лодок и подводных аппаратов. Мобильный гидроакустический буй-маяк включает источник тока, аппаратуру управления, всплывающий поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС и аппаратурой приема и излучения гидроакустических сигналов. Для навигационного оборудования морского района рассчитывают количество гидроакустических буев-маяков, необходимых для навигационного оборудования заданного морского района и определяют точки их установки. Готовят на базе гидроакустические буи-маяки к установке, проверяют их работоспособность и загружают на плавсредство. Доставляют их в заданный морской район и в расчетных точках сбрасывают в воду, после приводнения переводят гидроакустические буи-маяки в рабочее положение. У стационарных буев отделяют якорь, разматывают буйреп и устанавливают его на грунте, оставляя поплавок с антенной, также как и у дрейфующего буя, на поверхности воды, включают радиостанцию, приемник спутниковой системы навигации, комплект спутниковой связи и аппаратуру звукоподводной связи, получают от спутниковой системы навигации географические координаты буя и по запросу надводных или подводных плавсредств передают их по радио или звукоподводной связи. Достигается ускорение навигационного оборудования района и повышение качества работы в нем своих плавсредсв за счет обеспечения их точными навигационными параметрами для выполнения маневров, повышения безопасности плавания. 2 н.п. ф-лы, 2 ил.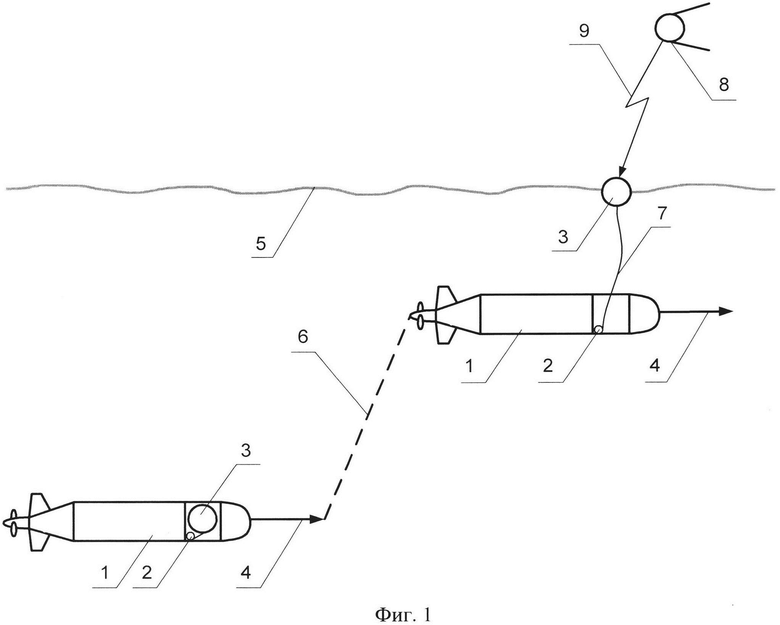
1. Мобильный гидроакустический буй-маяк, включающий источник тока, аппаратуру управления, всплывающий поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС и аппаратурой приема и излучения гидроакустических сигналов, отличающийся тем, что мобильный гидроакустический буй-маяк размещается в отдельном модуле автономного необитаемого подводного аппарата, имеющего бортовую систему управления, устройства связи и навигации, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями, дополнительно модуль оборудуется устройством отделения всплывающего поплавка с антенной от подводного аппарата и возвращения его обратно с приводом и катушкой с кабелем, связывающим приемник спутниковой системы навигации, расположенной в поплавке с антенной, с аппаратурой управления буя, а также устройством распознавания сигналов запроса своих сил для разрешения передачи запрашиваемой ими информации, шифратором, преобразующим информацию для предотвращения ее восстановления в случае перехвата посторонними объектами и дешифратором, осуществляющим обратное преобразование информации, вычислительным устройством и датчиками гидростатического и гидродинамического давления, служащими для расчета скорости дрейфа мобильного гидроакустического буя-маяка при его покладке на грунт, направления и величины горизонтального сноса поплавка относительно точки постановки.
2. Способ навигационного оборудования морского района, при котором рассчитывают количество гидроакустических буев-маяков, необходимых для навигационного оборудования заданного морского района, и определяют точки их установки, готовят на базе гидроакустические буи-маяки к установке, проверяют их работоспособность и загружают на плавсредство, доставляют их в заданный морской район и в расчетных точках сбрасывают в воду, после приводнения переводят гидроакустические буи-маяки в рабочее положение, при этом у стационарных буев отделяют якорь, разматывают буйреп и устанавливают его на грунте, оставляя поплавок с антенной, также как и у дрейфующего буя, на поверхности воды, включают радиостанцию, приемник спутниковой системы навигации, комплект спутниковой связи и аппаратуру звукоподводной связи, получают от спутниковой системы навигации географические координаты буя и по запросу надводных или подводных плавсредств передают их по радио или звукоподводной связи, отличающийся тем, что используют мобильные гидроакустические буи-маяки, выполненные на базе автономных необитаемых подводных аппаратов, вводят в их бортовую систему управления маршрутное задание, готовят к пуску и выпускают с плавсредства или летательного аппарата, осуществляют движение одного и более мобильных гидроакустических буев-маяков по заданному маршруту на заданной глубине в расчетную или заданную для каждого из них точку, в процессе своего развертывания в заданный район они используют звукоподводную связь, средства подводного наблюдения и действуют в группе согласованно, на участке перехода, а также в расчетной или заданной точке отделяют от подводного аппарата поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС, и аппаратурой приема и излучения гидроакустических сигналов, разматывают соединяющий кабель и поднимают поплавок с антенной на поверхность воды, получают от спутниковой системы навигации координаты всплывшего поплавка и рассчитывают в вычислительном устройстве по известной глубине и смещению от подводного аппарата его географические координаты, осуществляет покладку мобильного гидроакустического буя-маяка на грунт и с помощью устройства отделения и возвращения поплавка устанавливает заданную длину кабеля между поплавком с антенной и буем, с учетом показаний датчиков гидростатического и гидродинамического давления, длины кабеля поплавка с антенной и глубины погружения автономного необитаемого подводного аппарата, в вычислительном устройстве рассчитывают истинные географические координаты поплавка с антенной мобильного гидроакустического буя-маяка и переводят его в дежурный режим работы, передают на действующие в районе свои надводные или подводные плавсредства по их запросу координаты и дистанцию до буя-маяка, рассчитываемую в вычислительном устройстве по отрезку времени между запросом и ответом с учетом известной скорости распространения звука в воде, по команде с пункта управления, транслируемой по звукоподводной связи прибывшим плавсредством или другим ретранслятором, сбрасываемым в районе, например, с летательного аппарата, выбирают кабель с поплавком и антенной на борт мобильного гидроакустического буя-маяка и меняют его позицию, переходя в другой район.
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
| US 5331602 A1, 19.07.1994 | |||
| СПОСОБ ПРИМЕНЕНИЯ РАДИОГИДРОАКУСТИЧЕСКИХ БУЕВ РЕАКТИВНЫХ (ВАРИАНТЫ) | 2011 |
|
RU2525189C2 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С МНОЖЕСТВЕННЫМ ДОСТУПОМ И ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2006 |
|
RU2315428C9 |

