Изобретение относится к системам посадки (СП) летательных аппаратов (ЛА), в частности, к бортовым автономным СП ЛА в сложных метеоусловиях (СМУ) в любое время суток на необорудованные в радиотехническом отношении взлетно-посадочные полосы (ВПП), в том числе ровные участки дорог и земной поверхности.
Известны [1, с. 244-247; 2, с.96-103, 108-115, 187-190; 3, с.306-311, 314-318; 4, с.305-311, 339-345] радиомаячные СП ЛА метрового и сантиметрового диапазонов, состоящие из наземного и бортового радиотехнического оборудования в виде курсового, глиссадного, маркерных, азимутального, угломестного, дальномерного радиомаяков и соответствующих радиоприемников на борту ЛА; радиолокационные СП, состоящие из наземного посадочного радиолокатора и средств связи оператора с летчиком; упрощенные СП с наземным оборудованием в виде приводных радиостанций, маркерных радиомаяков, радиопеленгатора и бортового оборудования, используемого в радиомаячных СП. Однако указанные СП обладают рядом существенных недостатков: невозможность быстрого оперативного развертывания таких СП на временных ВПП, ровных участках дорог и земной поверхности из-за большой массы, габаритов и сложности оборудования, отсутствие возможности измерения дальности между ЛА и ВПП для радиомаячных СП метрового диапазона длин волн и др.
Известны также способы посадки ЛА на необорудованный радиотехническими системами аэродром с помощью системы наземных ориентиров (НО) в виде пластин [5] или сигнальных фонарей, расположенных вблизи ВПП [3, с. 355-357]. Однако существенным недостатком таких СП является необходимость визуального наблюдения летчиком НО, что в СМУ часто бывает невозможным.
Из известных технических решений наиболее близким (прототипом) является способ автономного формирования посадочной информации для ЛА и устройство для его осуществления [6], предназначенный для посадки ЛА в условиях малой видимости на ВПП, необорудованную радиотехническими средствами посадки. Способ предусматривает выполнение следующих действий.
При заходе ЛА на посадку производят радиолокационный обзор подстилающей поверхности земли с помощью бортовой радиолокационной станции (БРЛС) с целью обнаружения ВПП и получения ее изображения на экране индикатора.
Визуально определяют боковое отклонение ЛА от глиссады в горизонтальной плоскости по отклонению оси симметрии изображения ВПП на экране индикатора относительно оси симметрии экрана индикатора и измеряют дальность до подстилающей поверхности в направлении линии визирования антенны, установленной под углом места, равном углу наклона глиссады к плоскости горизонта.
Определяют отклонение ЛА от глиссады в вертикальной плоскости по отклонению по дальности изображения на экране индикатора начала ВПП относительно дальности до подстилающей поверхности в направлении линии визирования.
Для определения ошибки управления ЛА по курсу вычисляют разность текущего курса ЛА и заданного посадочного курсового угла ВПП. Величину и знак указанной ошибки отображают на экране индикатора.
При управлении ЛА в процессе захода его на посадку, снижения и посадки совмещают метку нулевого положения антенны по азимуту с меткой продольной оси ЛА и осью симметрии изображения ВПП.
Недостатками прототипа являются: ограниченная дальность действия и низкая точность измерения дальности до начала ВПП из-за малой эффективной площади рассеяния (ЭПР) ВПП и земной поверхности при близком к нулю угле наклона диаграммы направленности антенны БРЛС относительно горизонта, большие ошибки измерения отклонения ЛА от глиссады в горизонтальной и вертикальной плоскостях, поскольку их оценка осуществляется летчиком визуально и без учета скорости отклонения ЛА от глиссады.
Таким образом, задачей изобретения является увеличение дальности действия системы посадки, повышение точности измерения отклонения ЛА от глиссады, обеспечение измерений скоростей отклонения ЛА от глиссады в горизонтальной и вертикальной плоскостях и формирование сигналов управления ЛА, обеспечивающих высокую точность выдерживания им заданной траектории посадки и, тем самым, безопасность посадки в СМУ на необорудованную радиотехническими системами посадки ВПП.
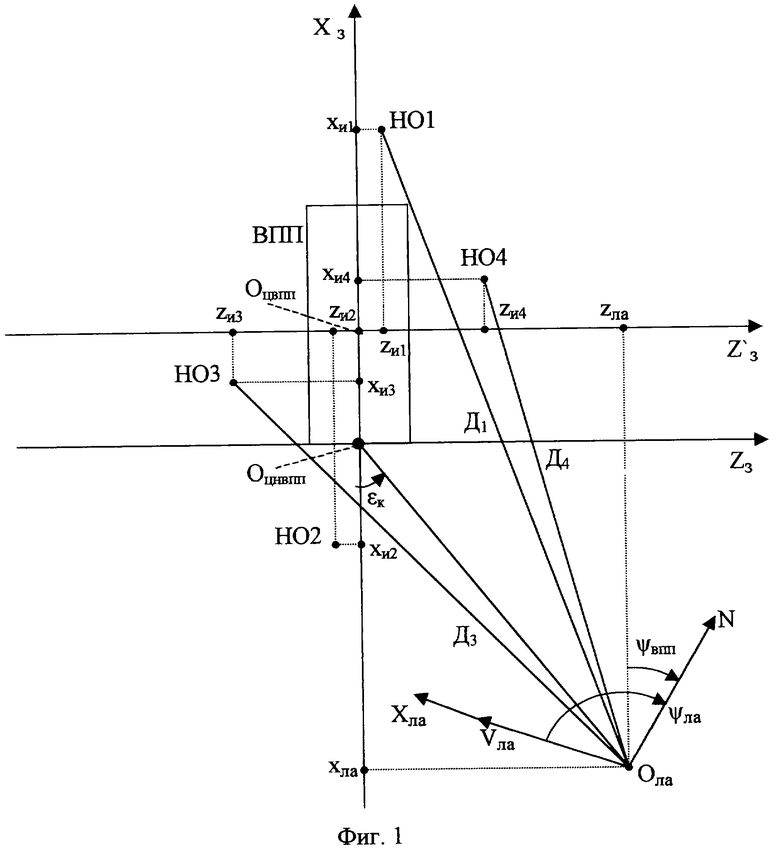
Поставленная задача достигается тем, что ВПП оснащают четырьмя НО, например, пассивными радиолокационными уголковыми отражателями [7] или маяками-ответчиками [4, с.342-344]. НО размещают (см. фиг.1) на продольной и поперечной осях симметрии ВПП у ее краев, причем считают, что НО, наиболее удаленный от заходящего на посадку ЛА, является первым (HO1), самый близкий к ЛА - вторым (НO2), наблюдаемый с ЛА слева от ВПП - третьим (НО3), наблюдаемый с ЛА справа от ВПП - четвертым (НO4). Если в указанные места по каким-либо причинам установить НО невозможно, то их размещают вблизи этих мест. Измеряют расстояния zиi, где  от НОi до продольной оси симметрии ВПП Х3 и расстояния хиi от НОi до поперечной оси симметрии ВПП Z3, при этом к каждому измеренному значению хиi прибавляют l/2, где l - длина ВПП, определяя тем самым координаты
от НОi до продольной оси симметрии ВПП Х3 и расстояния хиi от НОi до поперечной оси симметрии ВПП Z3, при этом к каждому измеренному значению хиi прибавляют l/2, где l - длина ВПП, определяя тем самым координаты
хi=xиi+l/2
местоположения НОi относительно Оцнвпп - центра начала ВПП.Значения координат x1 и z1= zи1 HO1, x2 и z2=zи2 НО2, х3 и x3=zи3 НО3, x4 и x4=zи4 HO4, а также значения курсового угла ВПП ψвпп и рекомендуемое направление посадки передают на совершающий посадку ЛА, где их запоминают.
Выполняют радиолокационный обзор земной поверхности, обнаруживают сигналы четырех наземных ориентиров HO1, НО2, НО3 и НО4, по которым измеряют дальности Д1, Д2, Д3 и Д4 между ЛА и соответствующими упомянутыми НО и скорости сближения ЛА с ними  соответственно. Измеряют высоту полета ЛА Нла, курс ЛА ψла, угол тангажа ЛА ϑла, угол крена ЛА γла, и вертикальную скорость ЛА
соответственно. Измеряют высоту полета ЛА Нла, курс ЛА ψла, угол тангажа ЛА ϑла, угол крена ЛА γла, и вертикальную скорость ЛА 
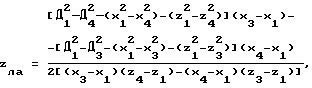
По измеренным значениям дальностей Д1, Д3, Д4 и запомненным значениям координат НО x1, z1, х3, z3, x4, z4 вычисляют координаты ЛА Хла и zла относительно центра начала ВВП в горизонтальной плоскости по формулам
Вычисляют εк курсовой угол ЛА - угол между осевой линией ВПП и проекцией на горизонтальную плоскость линии, соединяющей ЛА с центром начала ВПП, по формуле
и εг угол наклона глиссады - угол между осевой линией ВПП и проекцией на вертикальную плоскость линии, соединяющей ЛА с центром начала ВПП, по формуле
Вычисляют скорости изменения координат ЛА  и скорости изменения углов
и скорости изменения углов  по формулам:
по формулам:

По вычисленным значениям  измеренным значениям углов ψла, ϑла, γла и запомненному значению курсового угла ВПП ψвпп = в системе автоматического управления (САУ) ЛА известным образом [1, с. 188-191] формируют сигналы управления ЛА в горизонтальной и вертикальной плоскостях и по ним осуществляют управление ЛА на этапах снижения и посадки.
измеренным значениям углов ψла, ϑла, γла и запомненному значению курсового угла ВПП ψвпп = в системе автоматического управления (САУ) ЛА известным образом [1, с. 188-191] формируют сигналы управления ЛА в горизонтальной и вертикальной плоскостях и по ним осуществляют управление ЛА на этапах снижения и посадки.
Необходимо отметить следующее.
1. Формулы (1)-(8) были получены по фиг.1 и 2.
2. При заходе на посадку номера  НОi на ЛА всегда определяют в соответствии с вышеописанной методикой, что обеспечивает проведение всех вышеописанных вычислений по формулам (1)-(8) независимо от направления посадки.
НОi на ЛА всегда определяют в соответствии с вышеописанной методикой, что обеспечивает проведение всех вышеописанных вычислений по формулам (1)-(8) независимо от направления посадки.
3. При вычислениях всегда используют значения только трех НО (HO1, НО3 и НO4). Наличие НО2 необходимо для обеспечения посадки ЛА с любого направления.
На фиг.1 показаны: ВПП - взлетно-посадочная полоса; ОцвппХ3Z'3 - горизонтальная невращающаяся земная прямоугольная система координат с центром Оцвпп, расположенным в центре ВПП; ОщнвппХ3Z3 - горизонтальная невращающаяся земная прямоугольная система координат с центром Оцнвпп, расположенным в центре начала ВПП; HO1, НО2, НО3, НO4 - четыре наземных ориентира; xиi,zиi, xи2, zи2, xи3, zи3, xи4, zи4 - измеренные значения координаты HO1, НО2, НО3, НO4, соответственно, в системе координат ОцвппХ3Z'3; Ола - положение ЛА при заходе на посадку; xла, Zла - координаты ЛА; Хла- продольная ось ЛА; Vла - вектор воздушной скорости ЛА; Д1, Д2, Д3, Д4 - дальности между ЛА и соответствующими НО; εк - курсовой угол ЛА; N - направление на север; ψла - курс ЛА; ψвпп - курсовой угол ВПП.
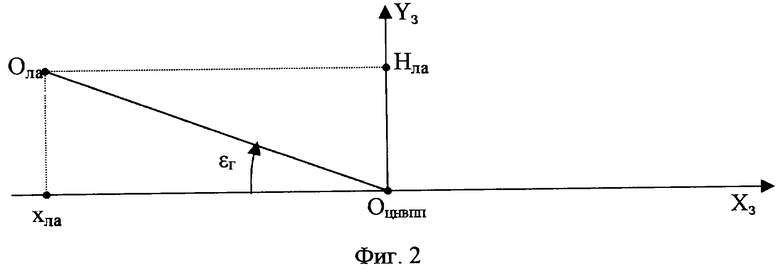
На фиг.2 показаны: ОцнвппХ3Y3 - вертикальная невращающаяся земная прямоугольная система координат с центром Оцнвпп расположенным в центре начала ВПП, осью Х3, расположенной по продольной оси симметрии ВПП и осью Y3, перпендикулярной оси Х3; Ола - положение ЛА при заходе на посадку; Нла - высота полета ЛА; xла - координата ЛА; εг - угол наклона глиссады.
Для лучшего понимания предлагаемого способа как процесса выполнения действий над материальным объектом с помощью материальных средств и подтверждения возможности реализации заявленного изобретения на фиг.3 показана упрощенная структурная схема возможного варианта устройства (системы) посадки ЛА на необорудованную в радиотехническом отношении ВПП, где:
1, 2, 3, 4- наземные ориентиры HO1, HO2, НО3, НO4 соответственно;
5 - передающее устройство БРЛС;
6 - антенная система БРЛС;
7 - приемное устройство БРЛС;
8 - измеритель дальности и скорости сближения БРЛС;
9 - вычислитель, в состав которого входит запоминающее устройство (ЗУ);
10 - система автоматического управления (САУ) ЛА;
11 - система курсовертикали и воздушных сигналов ЛА;
12 - радиовысотомер;
13 - средство связи (любая связная радиостанция или система передачи данных);
14 - ЛА.
Пассивные радиолокационные уголковые отражатели или маяки-ответчики, используемые в качестве НО, 1, 2, 3, 4 создают узконаправленное излучение радиолокационного сигнала максимальной интенсивности в направлении на источник облучения, перемещающийся в широком телесном угле [7; 4, с. 342-344]. На принципы построения и функциоинирования БРЛС, передающего устройства БРЛС 5, антенной системы БРЛС 6, приемного устройства БРЛС 7, измерителя дальности и скорости сближения БРЛС 8, а также вычислителя 9, САУ ЛА 10, системы курсовертикали и воздушных сигналов ЛА 11, радиовысотомера 12, средств связи 13 заявляемый способ не накладывает никаких ограничений, они подробно описаны в литературе [1, с. 59, 81-88, 319, 336-337; 8, с. 35, 36, 64-70, 158-167].
Система посадки ЛА на необорудованную в радиотехническом отношении ВПП с реализованным в ней заявляемым способом работает следующим образом.
ВПП оснащают четырьмя НО: HO1, НО2, НО3 и НO4. Координаты всех НО х1, z1, х2, z2, х3, z3, х4, z4 относительно центра начала ВПП, а также значения курсового угла ВПП ψвпп и рекомендуемое направление захода на посадку передают на ЛА с помощью средств связи 13. На ЛА в ЗУ вычислителя 9 со средства связи 13 вводят и запоминают полученные значения ψвпп и х1, z1, x2, z2, x3, z3, x4, z4.
В передающем устройстве БРЛС 5 формируют высокочастотный сигнал, который через антенную систему БРЛС 6 излучают в направлении НО 1, 2, 3, 4. С помощью антенной системы БРЛС 6 принимают отраженные от НО 1, 2, 3, 4 радиосигналы и подают их на вход приемного устройства БРЛС 7. Последнее усиливает, преобразует их, выделяет на фоне шумов и принимает решение об обнаружении НО [8, с. 64-70, 15 8-167]. С выхода приемного устройства БРЛС 7 упомянутые сигналы подают на вход измерителя дальности и скорости сближения БРЛС 8, в котором по ним измеряют значения дальностей Д1 Д2, Д3 и Д4 соответственно между ЛА и НО1, НО2, НО3 и НO4, скорости сближения ЛА с ними  соответственно [4, с. 342-344; 8, с. 158-167; 9, с. 270-271; 10, с. 195-202] , которые подают в вычислитель 9. С помощью системы курсовертикали и воздушных сигналов ЛА 11 измеряют значения курса ЛА ψла, угла тангажа ЛА ϑла, угла крена ЛА γла и подают их в САУ ЛА 10. С помощью системы курсовертикали и воздушных сигналов ЛА 11 также измеряют значение вертикальной скорости ЛА
соответственно [4, с. 342-344; 8, с. 158-167; 9, с. 270-271; 10, с. 195-202] , которые подают в вычислитель 9. С помощью системы курсовертикали и воздушных сигналов ЛА 11 измеряют значения курса ЛА ψла, угла тангажа ЛА ϑла, угла крена ЛА γла и подают их в САУ ЛА 10. С помощью системы курсовертикали и воздушных сигналов ЛА 11 также измеряют значение вертикальной скорости ЛА  и подают ее в вычислитель 9. С помощью радиовысотомера 12 измеряют значение высоты полета ЛА Нла и подают его в вычислитель 9. В вычислителе 9: по формулам (1) и (2) вычисляют значения координат ЛА хла, zла; по формуле (3) - значение курсового угла ЛА εк; по формуле (4) - значение угла наклона глиссады εг; по формулам (5)-(8) - значения скорости изменения указанных углов
и подают ее в вычислитель 9. С помощью радиовысотомера 12 измеряют значение высоты полета ЛА Нла и подают его в вычислитель 9. В вычислителе 9: по формулам (1) и (2) вычисляют значения координат ЛА хла, zла; по формуле (3) - значение курсового угла ЛА εк; по формуле (4) - значение угла наклона глиссады εг; по формулам (5)-(8) - значения скорости изменения указанных углов  Значения углов εк и εг и значения скорости изменения указанных углов
Значения углов εк и εг и значения скорости изменения указанных углов  подают на вход САУ ЛА 10, где по ним и по значениям углов ψвпп, ψла, ϑла и γла формируют сигналы управления ЛА в горизонтальной и вертикальной плоскостях [1, с. 59-68, 81-84], по которым управляют ЛА 14, тем самым обеспечивая требуемую траекторию его движения в горизонтальной и вертикальной плоскостях.
подают на вход САУ ЛА 10, где по ним и по значениям углов ψвпп, ψла, ϑла и γла формируют сигналы управления ЛА в горизонтальной и вертикальной плоскостях [1, с. 59-68, 81-84], по которым управляют ЛА 14, тем самым обеспечивая требуемую траекторию его движения в горизонтальной и вертикальной плоскостях.
Предложенный способ посадки ЛА в отличие от прототипа обладает большей дальностью действия за счет использования НО, имеющих значительно большую ЭПР, чем ЭПР ВПП и подстилающей поверхности, и, по той же причине, более высокую точность измерений дальности до ВПП и скорости сближения с ней, и соответственно более высокую точность вычисления значений курсового угла ЛА, угла наклона глиссады, скоростей их изменения и отклонения ЛА от глиссады, тем самым обеспечивая высокую точность полета ЛА по требуемой траектории снижения и посадки в сложных метеоусловиях.
Качество функционирования приведенной в качестве примера реализации системы посадки ЛА было проверено моделированием ее работы на ЭВМ. Моделирование подтвердило высокую эффективность предлагаемого способа посадки ЛА на необорудованную в радиотехническом отношении ВПП.
Источники информации
1. Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973.
2. Бородин В.Т., Рыльский Г.И. Управление полетом самолетов и вертолетов. - М.: Машиностроение, 1972.
3. Духон Ю.И., Ильинский Н.Н. Средства управления летательными аппаратами. - М.: Воениздат, 1972.
4. Сафронов Н.А. Радиооборудование самолетов. - М: Машиностроение, 1993.
5. Лаврушко В.Н., Лопухов А.Н. Способ захода на посадку летательных аппаратов и система его обеспечения. Патент RU 2156720 С1, 24.12.1999.
6. Артемов В. Т. Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления. Патент SU 1836642 A3, 08.04.1991.
7. Артемов В.Т., Горин И.И. Система для посадки воздушных судов в условиях слабой освещенности и устройство для его реализации. Патент RU 2153443 С2, 28.04.1997.
8. Антипов В. Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофункциональные радиолокационные комплексы истребителей. - М.: Воениздат, 1994.
9. Меркулов В.И., Перов А.И., Саблин В.Н. и др. Радиолокационные измерители дальности и скорости / Под ред. В.Н. Саблина. - М.: Радио и связь, 1999.
10. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2353552C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
Изобретение относится к системам посадки летательных аппаратов (ЛА). Взлетно-посадочную полосу (ВПП) оснащают четырьмя ориентирами, установленными на продольной и поперечной осях ВПП. Информацию о координатах ориентиров, значения курсового угла ВПП передают на ЛА. С ЛА проводят радиолокационный обзор земной поверхности и по сигналам от ориентиров определяют расстояния от этих ориентиров до ЛА. Основываясь на этих данных, вычисляют курс ЛА, углы крена и тангажа, значение вертикальной скорости ЛА. В результате формируют сигналы управления ЛА в горизонтальной и вертикальной плоскостях. Изобретение направлено на повышение уровня безопасности полетов. 3 ил.
Способ посадки летательного аппарата (ЛА), заключающийся в том, что взлетно-посадочную полосу (ВПП) оснащают четырьмя наземными ориентирами (НО), например пассивными радиолокационными уголковыми отражателями или маяками-ответчиками, которые размещают на продольной и поперечной осях симметрии ВПП по ее краям, при этом считают, что НО, наиболее удаленный от заходящего на посадку ЛА, является первым HO1, самый близкий к ЛА - вторым НО2, наблюдаемый с ЛА слева от ВПП - третьим НО3, наблюдаемый с ЛА справа от ВПП - четвертым НO4, причем, если в указанные места по каким либо причинам установить указанные НО невозможно, то их размещают вблизи этих мест, измеряют расстояния Zиi, где  от НОi до продольной оси симметрии ВПП и расстояние хиi от НОi до поперечной оси симметрии ВПП, при этом к каждому измеренному значению xиi прибавляют l/2, где l - длина ВПП, определяя тем самым координаты хi= xиi+l/2 местоположения НОi относительно центра начала ВПП, полученные значения координат x1 и z1= zи1 HO1, х2 и z2= zи2 НО2, х3 и z3= zи3 НО3, x4 и z4= zи4 HO4, а также значения курсового угла ВПП ψвпп и рекомендуемое направление посадки передают на совершающий посадку ЛА, где их запоминают, выполняют радиолокационный обзор земной поверхности, обнаруживают сигналы HO1, НО2, НО3 и HO4, по которым измеряют дальности Д1, Д2, Д3 и Д4 между ЛА и соответствующими упомянутыми НО и скорости сближения ЛА с ними
от НОi до продольной оси симметрии ВПП и расстояние хиi от НОi до поперечной оси симметрии ВПП, при этом к каждому измеренному значению xиi прибавляют l/2, где l - длина ВПП, определяя тем самым координаты хi= xиi+l/2 местоположения НОi относительно центра начала ВПП, полученные значения координат x1 и z1= zи1 HO1, х2 и z2= zи2 НО2, х3 и z3= zи3 НО3, x4 и z4= zи4 HO4, а также значения курсового угла ВПП ψвпп и рекомендуемое направление посадки передают на совершающий посадку ЛА, где их запоминают, выполняют радиолокационный обзор земной поверхности, обнаруживают сигналы HO1, НО2, НО3 и HO4, по которым измеряют дальности Д1, Д2, Д3 и Д4 между ЛА и соответствующими упомянутыми НО и скорости сближения ЛА с ними 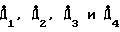 соответственно, измеряют высоту полета ЛА Нла, курс ЛА ψла, угол тангажа ЛА ϑла, угол крена ЛА γла, вертикальную скорость ЛА
соответственно, измеряют высоту полета ЛА Нла, курс ЛА ψла, угол тангажа ЛА ϑла, угол крена ЛА γла, вертикальную скорость ЛА  по измеренным значениям дальностей Д1, Д3, Д4 и запомненным значениям координат НО x1, z1, x3, z3, z4, z4 вычисляют координаты ЛА xла и zла oтносительно центра ВПП в горизонтальной плоскости по формулам:
по измеренным значениям дальностей Д1, Д3, Д4 и запомненным значениям координат НО x1, z1, x3, z3, z4, z4 вычисляют координаты ЛА xла и zла oтносительно центра ВПП в горизонтальной плоскости по формулам: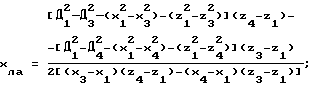
вычисляют угол εк между осевой линией ВПП и проекцией на горизонтальную плоскость линии, соединяющей ЛА с центром начала ВПП, по формуле
и угол εг между осевой линией ВПП и проекцией на вертикальную плоскость линии, соединяющей ЛА с центром начала ВПП, по формуле
вычисляют скорости изменения координат ЛА  и скорости изменения углов
и скорости изменения углов  по формулам
по формулам

по вычисленным значениям  измеренным значениям углов ψла, ϑла, γла и заполненному значению угла ψвпп в системе автоматического управления ЛА формируют сигналы управления ЛА в горизонтальной и вертикальной плоскостях и по ним осуществляют управление ЛА на этапах снижения и посадки.
измеренным значениям углов ψла, ϑла, γла и заполненному значению угла ψвпп в системе автоматического управления ЛА формируют сигналы управления ЛА в горизонтальной и вертикальной плоскостях и по ним осуществляют управление ЛА на этапах снижения и посадки.
| Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления | 1991 |
|
SU1836642A3 |
| СИСТЕМА ДЛЯ ПОСАДКИ ВОЗДУШНЫХ СУДОВ В УСЛОВИЯХ СЛАБОЙ ОСВЕЩЕННОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2153443C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |
| US 5986581 А, 16.11.1999 | |||
| US 5940014 А, 17.08.1999 | |||
| Состав сварочной проволоки | 1978 |
|
SU776825A1 |

