Настоящее изобретение относится к приспособлению для автоматической подачи соединительных элементов, таких как, например, болты, заклепки, винты, гайки и т.д., к обрабатывающему устройству, такому как, например, сварочная головка, клепальное устройство, завинчивающее устройство и т.д. Настоящее изобретение также относится к подающему рукаву для соединительных элементов.
В технологии промышленного производства, например, в автомобильной промышленности, соединяемые компоненты (из листового металла) соединяют друг с другом посредством автоматизированных обрабатывающих устройств в автоматизированном процессе, например, посредством сварки, свинчивания, клепания и т.д., или соединяемые компоненты оснащены подобными соединительными элементами, такими как, например, сварочные стержни и т.д.
В данном случае отдельные соединительные элементы обычно подают к обрабатывающему устройству посредством подающих рукавов, например, подают в обрабатывающее устройство с помощью сжатого воздуха. Длина подающих рукавов в некоторых случаях превышает 10 метров.
Для того чтобы избежать прерывания процесса промышленного производства, необходима подача соединительных элементов без трения. Подающие рукава обычно состоят из пластикового материала с подходящей внутренней поверхностью с низким трением для того, чтобы обеспечить подачу соединительных элементов. Подающие рукава изготовлены, например, из полиамида со сравнительно высокой твердостью. Из-за данного требования подающие рукава часто обладают недостаточной гибкостью при изгибании, так что при изгибающей нагрузке существует риск образования перегибов подающего рукава. При сравнительно твердом пластиковом материале образование перегибов приводит к необратимым перегибам, которые безвозвратно прерывают подачу соединительных элементов. Обычно требуется замена всего подающего рукава. Данная замена является сравнительно затратной по времени и приводит к нежелательным потерям при производстве.
В частности, с учетом набирающего популярность применения многокоординатных промышленных роботов, например, от трехкоординатных до шестикоординатных промышленных роботов, которые обычно содержат манипулятор робота, установленный с возможностью вращения на поворотном манипуляторе, при этом роботизированная рука, поддерживающая обрабатывающее устройство, расположена на свободном конце указанного манипулятора робота, для подающих линий установлены высокие требования, особенно относительно гибкости.
В настоящих решениях подающие рукава для соединительных элементов проложены отдельно от комплекта рукавов робота. Подающие линии, необходимые дополнительно, например, линии для подачи текучей среды или электричества к обрабатывающему устройству, прокладывают в подобном комплекте рукавов робота. Подобные комплекты рукавов представляют собой группировки линий, приспособленные к последовательности движений многокоординатного промышленного робота, и в которых множество подающих линий проложены в общем рукаве или трубе. Часто предоставлен блок полной группировки линий, который осуществляет компенсацию длины комплекта рукавов, необходимую из-за перемещения роботизированной руки, например, посредством пружинных элементов и т.д.
Исходя из этого, цель настоящего изобретения заключается в обеспечении улучшенной подачи подобных соединительных элементов к обрабатывающим устройствам, в частности, применительно к промышленным роботам.
Настоящей цели достигают согласно изобретению благодаря приспособлению для автоматической подачи соединительных элементов к обрабатывающему устройству, содержащему признаки по пункту 1 формулы изобретения. Кроме этого, настоящей цели достигают согласно изобретению благодаря подающему рукаву для соединительных элементов, содержащему признаки по пункту 12 формулы изобретения.
В частности, настоящее приспособление является многокоординатным промышленным роботом. Настоящее приспособление содержит так называемый комплект рукавов, в котором множество подающих линий для подачи средств производства обрабатывающему устройству проложены внутри защитной обшивки. Защитная обшивка представляет собой, например, гофрированную трубу, а также любую другую гибкую трубу или рукав, изготовленный из подходящего пластика, внутри которой/которого протянуты подающие линии. В качестве дальнейшего подающего контура комплект рукавов содержит гибкий подающий рукав для подачи соединительных элементов к обрабатывающему устройству. В данном случае подающий рукав образован внутренним рукавом, встроенным в обшивку рукава, изготовленную из эластичного пластика. В данном случае внутренний рукав спроектирован подходящим образом для направления соединительных элементов, например, для подачи соединительных элементов к обрабатывающему устройству с помощью сжатого воздуха. С этой целью внутренний рукав обладает внутренним поперечным сечением, приспособленным к элементам поперечного сечения, и обладает подходящей поверхностью с низким трением для скользящего направления соединительных элементов.
В данном контексте термин "встроенный" означает, что обшивка рукава плотно прижата к внутреннему рукаву и полностью окружает указанный внутренний рукав. Благодаря встраиванию внутреннего рукава в обшивку рукава из эластичного пластика, внутренний рукав фактически встроен внутри подающего рукава подобно нейтральному волокну. Благодаря этой специальной конструкции из двух частей достигают достаточной защиты от перегибов даже при высокой изгибающей нагрузке. Следовательно, в случае изгибания подающего рукава по существу лишь обшивка рукава подвергается растягивающей нагрузке или сжатию и снижается риск образования перегибов внутреннего рукава, который обычно является сравнительно твердым. Таким образом обеспечивают непрерывную безотказную работу всего приспособления. Благодаря встраиванию, например, Т-образного внутреннего рукава в предпочтительно круглую обшивку рукава, подающим рукавом, помимо прочего, можно управлять легким и надежным образом, сравнимым с управлением кабелем, и, следовательно, подающий рукав подходит для интеграции в качестве подающей линии в комплект рукавов.
В данном случае толщина стенки обшивки рукава находится в диапазоне нескольких миллиметров, например, в диапазоне от 2 до 5 мм. Подающий рукав, обладающий конструкцией из двух частей, предпочтительно является непрерывным изделием. Обшивку рукава предпочтительно наносят на внутренний рукав с помощью процесса экструзии.
Обычно для двух компонентов, т.е. для внутреннего рукава и обшивки рукава, используют разные материалы, так что два компонента не соединяются между собой посредством неразъемного соединения даже в случае процесса экструзии. Данная конфигурация делает возможным, с одной стороны, простое частичное удаление обшивки рукава, например, в конечной области. С другой стороны, таким образом внутренний рукав и обшивка рукава могут локально перемещаться относительно друг друга, так что в случае, например, изгибающей нагрузки достигают определенного разделения растягивающих или сжимающих усилий, воздействующих между обшивкой рукава и внутренним рукавом. Таким образом снижается нагрузка на внутренний рукав.
Для обеспечения хорошего проведения соединительных элементов внутренний рукав обычно изготавливают из сравнительно твердого материала, в частности, полиамида. Напротив, обшивку рукава изготавливают из материала, который значительно мягче и эластичнее. Таким образом, при изгибании обшивка рукава, по сравнению с твердым внутренним рукавом, находится в положении для быстрой амортизации удлинения и сгибания без каких-либо повреждений - в результате своей меньшей твердости и улучшенной эластичности, связанной с ней.
В данном случае внутренний рукав целесообразно обладает твердостью, которая более чем на 30% и предпочтительно более чем на 50% выше твердости обшивки рукава. Обшивка рукава, например, обладает твердостью по шкале Шора А, равной от 40 до 50, и внутренний рукав обладает твердостью по шкале Шора А, равной приблизительно от 70 до 80. Предпочтительным материалом, используемым для обшивки рукава, является полиуретан.
Обшивка рукава целесообразно выполнена, в общем, из термопластичного эластомера, в частности, из полиуретанового эластомера. За счет эластомерных, то есть эластичных свойств обшивки рукава, подающий рукав автоматически возвращается в исходное положение, что подходит для подачи соединительных элементов даже после значительной изгибающей нагрузки.
Как уже было упомянуто, особенное значение имеет то, что два компонента не соединены неразъемным соединением. Этого достигают предпочтительно с помощью подбора подходящих пар материалов или, в предпочтительной альтернативе или дополнении, также с помощью дополнительного разделительного слоя, предпочтительно с помощью обмотки, образованной, например, нетканым материалом. За счет данного способа даже в случае совместной экструзии надежно обеспечивается расположение обшивки рукава непосредственно и, в частности, также облегающим образом прилегающей к внутреннему рукаву, но не вступающей в неразъемное соединение с указанным внутренним рукавом. В данном случае обмотка предпочтительно представляет собой полную обмотку, то есть разделительный материал, например (полиэфирный) нетканый материал, покрывает все области внутреннего рукава.
В дальнейшем предпочтительном развитии обшивку рукава удаляют в конце из внутреннего рукава, так что конечная секция внутреннего рукава выполнена в виде вставной муфты для соединения с обрабатывающим устройством. При эксплуатации секцию оголенного конца, таким образом, вставляют в обрабатывающее устройство, и, таким образом, она определяет точку перехода соединительных элементов из подающего рукава, собственно, в обрабатывающее устройство.
Комплект рукавов обычно удерживают и направляют на приспособлении, в частности, на руке промышленного робота, посредством подходящих направляющих элементов. Удерживающий элемент для компенсации натяжения подающего рукава дополнительно предоставлен в качестве дополнения к данным направляющим элементам для комплекта рукавов как такового, при этом указанный удерживающий элемент захватывает подающий рукав в отдельных областях на обшивке рукава подобно зажиму. Удерживающий элемент, в общем, захватывает обшивку рукава подобно скобе. Лишь за счет конфигурации, содержащей гибкую обшивку рукава, обеспечивается установка подающего рукава в отдельных местах, в частности, на промышленном роботе, без риска повреждения твердого внутреннего рукава.
Данный удерживающий элемент предпочтительно расположен в непосредственной близости от оголенного конца и, таким образом, от вставной муфты. При эксплуатации многокоординатного промышленного робота удерживающий элемент предпочтительно закреплен на фланце между манипулятором робота и роботизированной рукой, при этом роботизированная рука служит опорой для обрабатывающего инструмента или образует указанный обрабатывающий инструмент.
Внутреннее поперечное сечение внутреннего рукава, в общем, приспособлено к обрабатываемым соединительным элементам. Во многих вариантах применения, в которых осуществляют обработку элементов в форме болтов, содержащих головку, например, винтов, заклепок и т.д., внутренняя обшивка таким образом соответственно имеет Т-образную форму профиля внутреннего поперечного сечения.
Наружное поперечное сечение внутреннего рукава также может иметь Т-образную форму или круглую форму. Наружное поперечное сечение обшивки рукава предпочтительно является круглым для того, чтобы обеспечить подходящее направление внутри комплекта рукавов.
В качестве подающих линий внутри комплекта рукавов предпочтительно предоставлены управляющие линии, рукава для передачи среды, такие как, например, рукава для подачи воздуха, рукава для подачи воды и т.д., и электрические подающие линии, например, электрическая линия для обрабатывающего устройства для сварки. В дальнейшем целесообразном развитии блок компенсации длины, содержащий возвратную пружину, также расположен на приспособлении, при этом указанный блок компенсации длины предоставляет автоматическую компенсацию длины комплекта рукавов в случае перемещения приспособления, в частности, роботизированной руки.
В конечном итоге, подающий рукав отличается тем, что внутренний рукав получает значительно лучшую защиту от перегибов за счет "поверхностного литья" (встраивания) внутреннего рукава внутри обшивки рукава. Даже после перегиба, вызванного перемещением робота или защемлением, подающий рукав - и, таким образом, также внутренний рукав - за счет эластичной обшивки рукава упруго возвращается в состояние, обеспечивающее беспрепятственную подачу соединительных элементов.
Дальнейшее определенное преимущество подающего рукава заключается в потенциале для легкой интеграции в обычный комплект рукавов; в частности, благодаря тому, что подающим рукавом можно управлять, подобно обычному кабелю или рукаву, за счет обшивки рукава и его можно направлять, в частности, даже при компенсации натяжения. Предпочтительно, в данном случае можно выполнять установку подающего рукава с помощью зажима, при этом обшивка рукава деформируется. В данном случае не происходит повреждения внутреннего рукава.
Подобная интеграция в комплект рукавов до настоящего времени была невозможна для подающих рукавов, которые, в зависимости от обстоятельств, были частично расположены в защитных трубках, поскольку крепление защитных трубок с помощью зажимов с достаточной силой сжатия было невозможным.
За счет съемного размещения обшивки рукава на внутреннем рукаве также возможно снимать верхнюю часть обшивки, например, в областях соединения. Следовательно, обшивка рукава не вступает в неразъемное соединение с внутренним рукавом.
Пример варианта осуществления изобретения далее будет описан более подробно со ссылкой на фигуры. На упрощенных изображениях:
на фиг.1 изображен шестикоординатный промышленный робот, содержащий комплект рукавов, проложенный в блоке компенсации длины, при этом подающий рукав для соединительных элементов расположен в указанном комплекте рукавов,
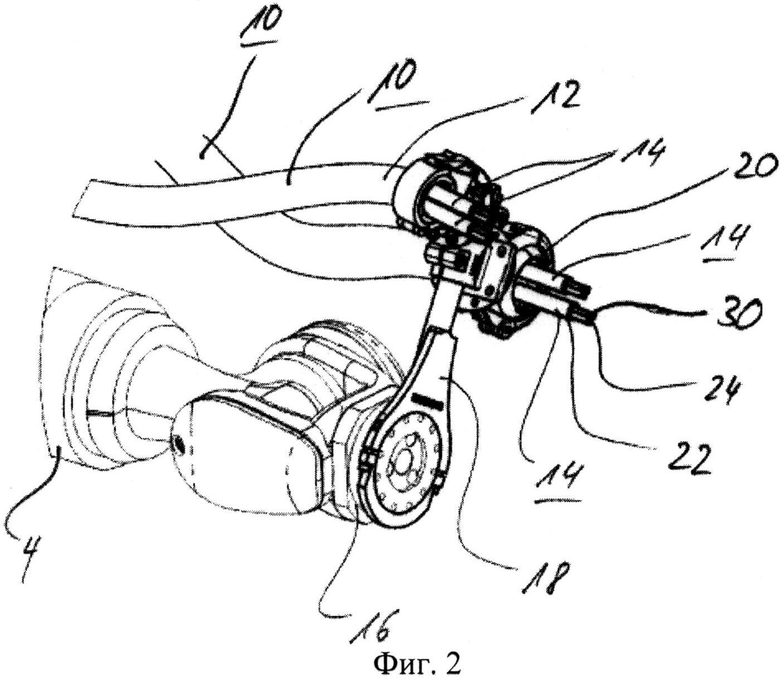
на фиг.2 изображен увеличенный вид области, обозначенной на фиг.1 кругом А,
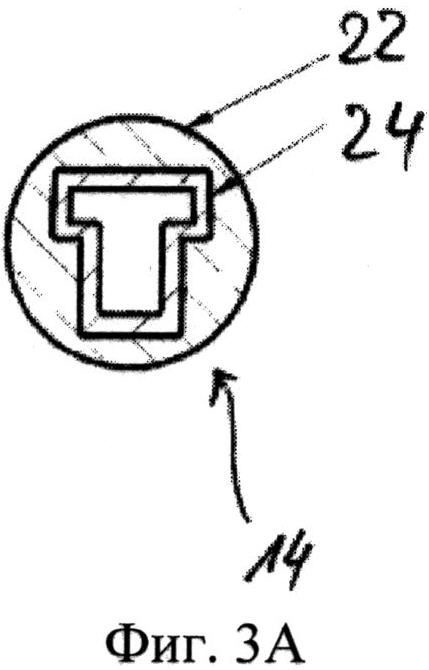
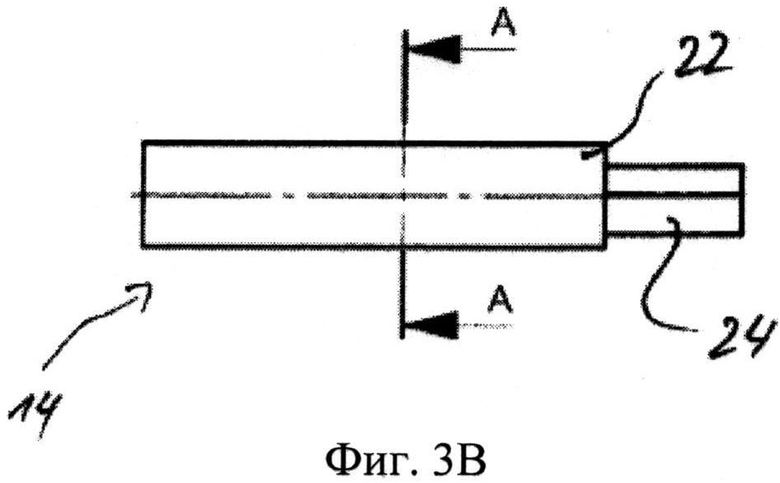
на фиг.3A-3D изображен первый вариант осуществления подающего рукава, при этом на фиг.3A изображено поперечное сечение вдоль линии А-А вида сбоку, в то время, как
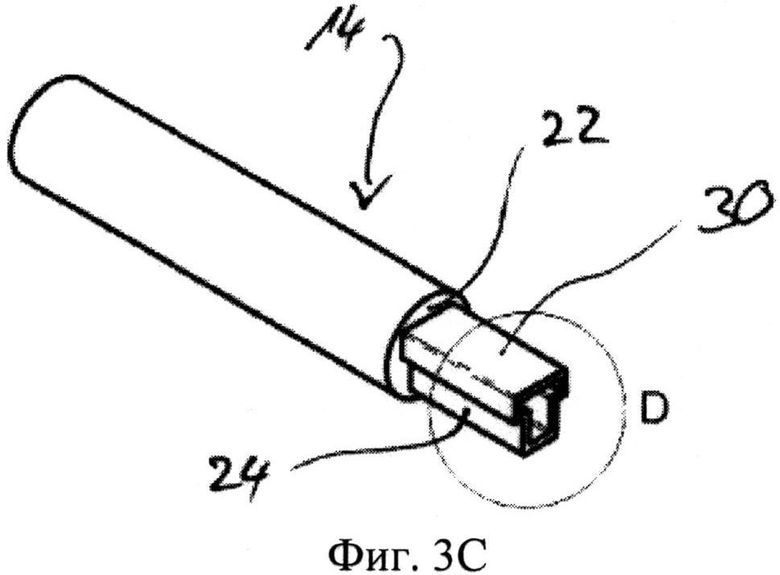
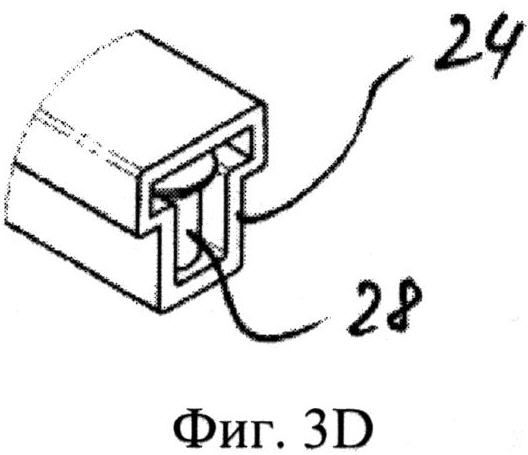
на фиг.3B и фиг.3C изображен вид в перспективе концевой детали с удаленной обшивкой, и на фиг.3D изображен увеличенный вид концевой детали с заклепкой, расположенной в ней, и
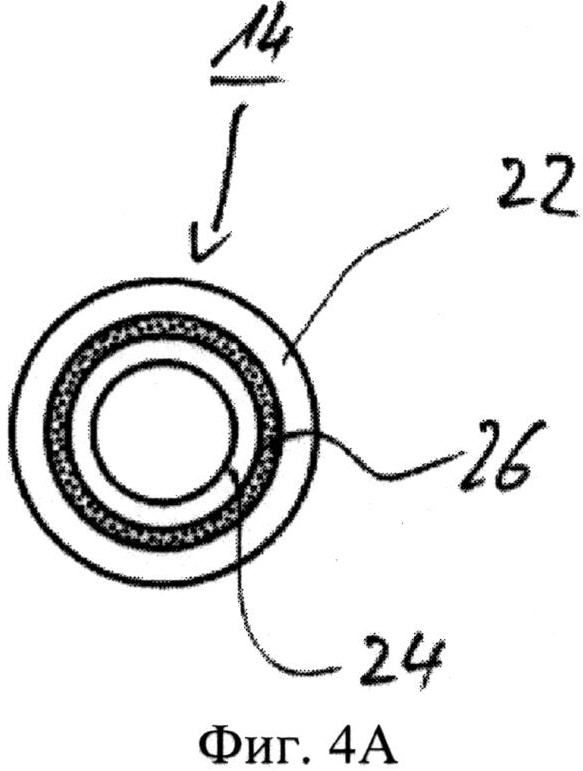
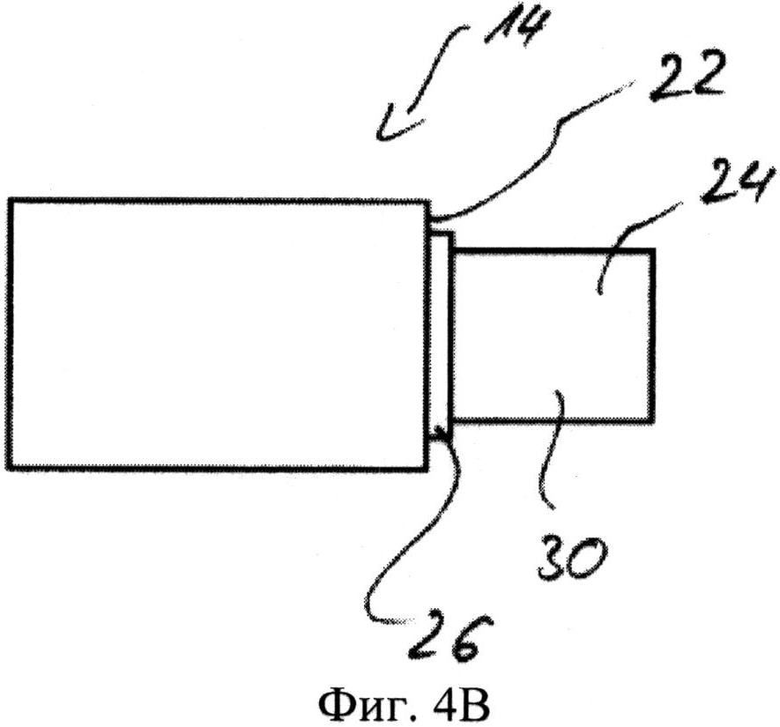
на фиг.4A-4B изображен второй вариант подающего рукава в поперечном сечении (фиг.4A) и в виде сбоку (фиг.4B).
на данных фигурах деталям с одинаковыми функциями соответствуют одинаковые ссылочные номера.
Многокоординатный, в частности, шестикоординатный промышленный робот изображен как пример на фиг.1 в качестве приспособления для автоматической подачи соединительных элементов. Принципы конструкции и эксплуатации подобных промышленных роботов 2 являются известными. Промышленный робот 2 содержит манипулятор 4 робота, установленный с возможностью вращения вокруг оси 3, при этом фланец 16 для установки обрабатывающего устройства/роботизированной руки (которая не изображена здесь более подробно) расположен на конце указанного манипулятора 4 робота. Блок 6 компенсации длины, содержащий возвратную пружину 8, расположен в области оси 3 на верхней стороне манипулятора 4 робота. Два подобных блока 6 компенсации длины, каждый для одного комплекта 10 рукавов, предоставлены в примере варианта осуществления. Каждый комплект 10 рукавов проходит подходящим образом к обрабатывающему устройству.
Комплект рукавов содержит защитную обшивку 12, выполненную, например, в виде гофрированной трубки или другой гибкой пластиковой трубки. Множество подающих линий проложено внутри защитной обшивки, из которых в примере варианта осуществления изображены лишь два подающих рукава 14 на один комплект 10 рукавов.
В примере варианта осуществления комплекты 10 рукавов в каждом случае полностью проходят через блок 6 компенсации длины и окружены в блоках 6 компенсации длины спиральной пружиной, которая с одной стороны опирается на обшивку 12 рукава, а с другой стороны опирается на блок 6 компенсации длины, и которая прикладывает возвратное усилие к комплекту 10 рукавов. В принципе, также возможно, чтобы защитная обшивка 12 оканчивалась внутри блока 6 компенсации длины и отдельные подающие линии проходили по отдельности, например, в боковом направлении, из блока 6 компенсации длины.
Как видно, в частности, на увеличенном изображении по фиг.2, удерживающий элемент 18 прикреплен к концу фланца 16, в частности, на торцевой поверхности точки соединения, направленной к обрабатывающему устройству. На своем свободном конце удерживающий элемент 18 содержит зажимный элемент 20, выполненный в форме скобы, который в каждом случае отдельно зажимает подающий рукав 14 для компенсации натяжения. С этой целью в данном примере варианта осуществления в зажимном элементе 20 предоставлены подходящие вставки.
Как уже было изображено на фиг.2 и еще лучше изображено на фиг.3A-3C и 4A и 4B, подающий рукав 14 образован наружной обшивкой 22 рукава и внутренним рукавом 24. Согласно примеру варианта осуществления по фиг.4A и 4B, разделительный слой 26 или разделение дополнительно предоставлено в альтернативном варианте осуществления между обшивкой 22 рукава и внутренним рукавом 24. Указанный разделительный слой, в частности, образован промежуточным слоем, изготовленным, например, из (полиэфирного) нетканого материала.
Обшивка 22 рукава предпочтительно "отлита" на внутреннем рукаве 24 посредством процесса экструзии, так что указанный внутренний рукав 24 встроен внутри материала обшивки 22 рукава.
Материалы обшивки 22 рукава и внутреннего рукава 24 целесообразно отличаются друг от друга, в частности, отличаются твердостью. Внутренний рукав 24 в общем отличается высокой твердостью и жесткостью и обычно изготовлен из полиамида. Внутренний рукав 24 обычно обладает твердостью по шкале Шора А, равной от 70 до 80. Он подходит для скользящего направления соединительных элементов. Для примера, заклепка изображена на фиг.3D в качестве соединительного элемента.
Напротив, обшивка 22 рукава состоит из материала с существенно меньшей твердостью и, в частности, с улучшенной эластичностью. Обшивка 22 рукава предпочтительно состоит из полиуретана. Ее твердость предпочтительно находится в диапазоне от 40 до 50 по шкале Шора А. В качестве альтернативы как внутренний рукав 24, так и обшивка 22 рукава состоят из полиуретана, но с разной степенью твердости. В частности, в этом случае, разделение, выполненное в виде разделительного слоя 26, в частности в виде полной обмотки из нетканого материала, предоставлено между двумя компонентами 22, 24.
В примере варианта осуществления по фиг.3A-3D, внутренний рукав 24 имеет в общем Т-образный профиль и, таким образом, до определенной степени приспособлен к геометрии соединительного элемента (заклепки 28). Приспособленное внутреннее поперечное сечение в общем означает, что соединительные элементы можно подавать, например, с помощью сжатого воздуха, по подающему рукаву 14 даже на расстояние в несколько десятков метров внутри внутреннего рукава 24 в предопределенном исходном положении и исходной ориентации. Как можно видеть, в частности, на фиг.3D, соединительный элемент в данном случае опирается своей головкой на боковые стороны Т-образного поперечного сечения внутреннего рукава 24.
В отличие от внутреннего рукава 24, обшивка 22 рукава в общем имеет круглое поперечное сечение, форма которого не зависит от геометрии внутреннего рукава 24.
В примере варианта осуществления по фиг.4A и 4B изображен вариант осуществления, содержащий круглый внутренний рукав 24. В данном случае дополнительно присутствует разделительный слой 26, образованный нетканым материалом.
В общем, обшивка 22 рукава не соединена неразъемным соединением с внутренним рукавом 24, и, таким образом, ее легко удалить из указанного внутреннего рукава 24. Как можно понять, в частности, из фиг.2, это используют с целью оголения конца подающего рукава обшивки 22 рукава для того, чтобы таким образом образовать секцию свободного конца внутреннего рукава 24, которая служит в качестве вставной муфты 30, и ее помещают в соответствующую муфту на обрабатывающем устройстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЕДИНИТЕЛЬНЫЙ ЭЛЕМЕНТ | 2006 |
|
RU2404821C2 |
| СОЕДИНИТЕЛЬНЫЙ ЭЛЕМЕНТ И СОДЕРЖАЩЕЕ ЕГО СТЫКОВОЧНОЕ ПРИСПОСОБЛЕНИЕ | 2004 |
|
RU2338671C2 |
| Способ изготовления крупногабаритного готового объемного модуля и способ строительства здания из крупногабаритных готовых объемных модулей | 2018 |
|
RU2712845C1 |
| ГИБКИЙ ВОРОНКООБРАЗНЫЙ ЭЛЕМЕНТ ДЛЯ НАПРАВЛЯЮЩЕГО РУКАВА ДЛЯ МАТЕРИАЛА | 2015 |
|
RU2705032C2 |
| СОЕДИНИТЕЛЬНЫЙ ЭЛЕМЕНТ | 2007 |
|
RU2446986C2 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2018 |
|
RU2685319C1 |
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ МАНИПУЛЯТОРА | 2015 |
|
RU2611621C2 |
| Способ производства крупногабаритных готовых модулей для строительства здания | 2024 |
|
RU2839511C1 |
| ОБРАБАТЫВАЮЩИЙ СТАНОК | 2013 |
|
RU2711694C2 |
| БЛОК НОСИТЕЛЯ РЕАГЕНТОВ, АДАПТЕР И СПОСОБ МАНИПУЛЯЦИИ БЛОКОМ НОСИТЕЛЯ РЕАГЕНТОВ | 2015 |
|
RU2682097C2 |
Группа изобретений относится к приспособлениям для автоматической подачи крепежных элементов к обрабатывающему устройству, которым является, в частности, промышленный робот (2). Приспособление содержит комплект рукавов (10), в котором в качестве подающей линии имеется подающий рукав (14) для подачи соединительных элементов (28). Подающий рукав (14) сформирован из внутреннего рукава (24), встроенного в наружную обшивку (22) рукава. Обеспечивается надежная подача крепежных элементов к обрабатывающему устройству. 2 н. и 10 з.п. ф-лы, 8 ил.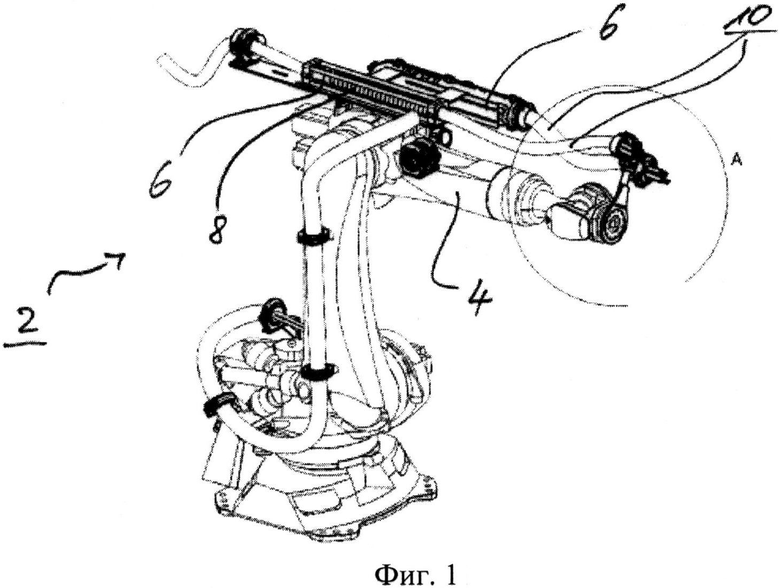
1. Приспособление (2) для автоматизированной подачи соединительных элементов к обрабатывающему устройству, содержащее комплект (10) рукавов для подачи средств производства к обрабатывающему устройству, при этом комплект (10) рукавов содержит защитную обшивку (12), в которой проложено несколько подающих линий, при этом в комплекте (10) рукавов расположен гибкий подающий рукав (14) для подачи соединительных элементов к обрабатывающему устройству, отличающееся тем, что подающий рукав (14) содержит внутренний рукав (24), встроенный в обшивку (22) рукава, изготовленную из эластичного пластика, и имеет внутреннее поперечное сечение, предназначенное для скользящего направления соединительных элементов по контуру поперечного сечения соединительных элементов.
2. Приспособление (2) по п.1, отличающееся тем, что обшивку (22) рукава наносят на внутренний рукав (24) с помощью процесса экструзии.
3. Приспособление (2) по п.1 или 2, отличающееся тем, что внутренний рукав (24) и обшивка (22) рукава не соединены между собой посредством неразъемного соединения.
4. Приспособление (2) по п.1, отличающееся тем, что внутренний рукав изготовлен из более твердого материала, чем обшивка (22) рукава, и, в частности, изготовлен из полиамида.
5. Приспособление (2) по п.1, отличающееся тем, что обшивка (22) рукава выполнена из термопластичного эластомера.
6. Приспособление (2) по п.1, отличающееся тем, что разделительный слой (26), в частности обмотка, расположен между обшивкой (22) рукава и внутренним рукавом (24).
7. Приспособление (2) по п.1, отличающееся тем, что обшивка (22) рукава удалена на конце внутреннего рукава (24) и секция внутреннего рукава (24), таким образом, выполнена в качестве вставной муфты (30) для соединения с обрабатывающим устройством.
8. Приспособление (2) по п.7, отличающееся тем, что комплект (10) рукавов направляют посредством по меньшей мере одного направляющего элемента (6) на опорной части приспособления (2), в частности на манипуляторе (4) робота, и в качестве компенсатора натяжения подающего рукава (14) на опорной части (4) дополнительно прикреплен удерживающий элемент (18), при этом указанный удерживающий элемент (18) охватывает обшивку (22) рукава подобно зажиму в области вставной муфты (30).
9. Приспособление (2) по п.8, выполненное в виде многокоординатного промышленного робота, при этом удерживающий элемент (18) прикреплен на фланце (16) между манипулятором (4) робота и роботизированной рукой.
10. Приспособление (2) по п.1, отличающееся тем, что комплект (14) рукавов содержит управляющие линии, рукава для передачи среды и/или линии электропитания в качестве подающих линий, причем в качестве направляющего элемента предоставлен блок (6) компенсации длины, содержащий возвратную пружину (8) для автоматической компенсации длины комплекта (14) рукавов в случае перемещения приспособления (2).
11. Приспособление (2) по п.1, отличающееся тем, что внутренний рукав (24) имеет многоугольную и, в частности, Т-образную форму внутреннего поперечного сечения.
12. Подающий рукав (14) для соединительных элементов, содержащий внутренний рукав (24), встроенный в обшивку (22) рукава, изготовленную из эластичного пластика, и обладающий внутренним поперечным сечением, предназначенным для скользящего направления соединительных элементов по контуру поперечного сечения соединительных элементов.

