Область техники
Настоящее изобретение относится к блоку носителя реагентов, адаптеру и способу манипуляции блоком носителя реагентов.
Уровень техники
С давних пор существует задача, заключающаяся в разработке приемов и стратегий для обеспечения выполнения экспериментов с большей скоростью и с обеспечением лучшей производительности. Указанная задача может быть решена, например, путем использования устройств, переносящих различные реагенты одновременно в различных блоках, с целью одновременного определения ряда характеристик в ходе тестирования жидкой пробы.
В US 7,510,687 В2 раскрыто использование устройства для одновременного обнаружения различных антител и антигенов в пробе. Устройство содержит небольшие абсорбирующие цилиндры, на которых образуются иммунокомплексы. Однако указанным устройством сложно манипулировать автоматически, и, следовательно, устройство требует значительной степени ручного управления для обеспечения его работы.
Широко известны автоматические системы для обработки проб, используемые для обработки биологических проб. Указанные автоматические системы для обработки проб содержат лабораторных роботов. Указанные лабораторные роботы обычно имеют по меньшей мере две подвижные роботизированные руки, одна из которых выполнена с возможностью пипетирования текучих сред, а другая выполнена с возможностью манипуляции блоками носителя реагентов. Зачастую, лабораторные роботы содержат несколько роботизированных рук, причем для манипуляции сосудами и пипетирования текучих сред обеспечены отдельные роботизированные руки.
Роботы, выполненные с возможностью пипетирования любого вида текучих сред широко известны специалистам в области техники. Указанные виды роботов также называют жидкостными манипуляторами.
Роботизированные руки для пипетирования текучих сред также называют пипетирующими руками; указанные руки выполнены в виде тонкой трубки, связанной с насосом посредством гибкого рукава. Жесткая часть трубки расположена вертикально и снабжена средствами перемещения с целью перемещения пипетирующей руки в горизонтальных направлениях (X, Y) и в вертикальном направлении (Z).
Роботизированные руки для манипуляции блоками носителей реагентов также называют манипуляционными руками; указанные руки содержат захват для захвата реакционного сопла. Указанные роботизированные руки также выполнены с возможностью перемещения во всех трех направлениях (X, Y, Z). Средства захвата могут представлять собой вилку для захвата планшета микротитратора или зажимное устройство меньшего размера для захвата отдельного реакционного сосуда, как раскрыто в WO 2013/174961 А2.
В WO 97/26539 раскрыта аналитическая биохимическая система для неподвижного размещения в ней проб с реагентами в неизменяемом, известном положении, содержащая держатель, удерживающий пробу и манипулятор для перемещения держателя к неподвижной пробе и участку осмотра. Держатель может быть стандартным пипетирующим устройством, выполненным с возможностью перемещения посредством роботизированной руки или руки в виде манипулятора, для контакта с пробой для определения наличия целевых биомолекул в пробе.
В US 6,216,340 В1 раскрыта установка для автоматической манипуляции содержащими пробы пробирками, закрытыми посредством винтовых крышек. Известная установка для автоматического открывания, закрывания и транспортирования пробирок с пробами содержит перемещаемый захват, который содержит поворотный инструмент для захвата приспособленный для введения и зацепления с выемкой указанной пробирки с формированием соединения, которое может быть заблокировано посредством поворота инструмента для захвата в первом направлении относительно пробирки с пробой и разблокировано посредством поворота инструмента для захвата относительно пробирки с пробой во втором направлении, противоположном первому направлению.
В US 6,656,724 В1 раскрыт лабораторный робот. Робот содержит пипетирующее устройство с пипетирующей рукой для пипетирования проб вещества и термоциклер. Эти два устройства представляют собой два разнесенных в пространстве рабочих места. Для перемещения сосудов с одного рабочего места на другое рабочее место робот дополнительно содержит манипуляционную руку для перемещения, например, микропланшетов.
Компанией HAMILTON BONADUZ AG, Швейцария, разработана роботизированная рука для лабораторного робота, представляющая собой пипетирующую руку, содержащую особый механизм связи. Указанный механизм называют "технологией СО-RE". Указанная пипетирующая рука может быть связана с пипетирующими наконечниками. Также обеспечена возможность использования двух независимых пипетирующих рук, причем с каждой из пипетирующих рук связан элемент захвата, в результате чего блок носителя реагентов может быть захвачен между двумя подобными элементами захвата. Таким образом, две пипетирующие руки используют в качестве вилки для захвата блоков носителя реагентов.
Раскрытие сущности изобретения
Задачей настоящего изобретения является обеспечение блока носителя реагентов, адаптера и способа манипуляции блоком носителя реагентов, позволяющих значительно повысить производительность стандартного лабораторного робота при небольших затратах.
Задача решена благодаря тому, что обеспечены блок носителя реагентов, адаптер и способ манипуляции блоком носителя реагентов согласно независимым пунктам формулы изобретения. Предпочтительные примеры реализации изобретения заданы в соответствующих зависимых пунктах формулы изобретения.
Основной принцип изобретения заключается в том, что одна обычная пипетирующая рука может быть использована для манипуляции блоком носителя реагентов.
Блок носителя реагентов может представлять собой один реакционный сосуд, картридж сосудов, содержащий несколько реакционных сосудов, расположенных в ряд, микропланшет, содержащий несколько реакционных сосудов, расположенных в виде двухмерной матрицы, или стержень.
Блок носителя реагентов представляет собой корпус для переноса реагентов, которые могут удерживаться блоком носителя реагентов посредством сосуда, посредством поверхностных взаимодействий и/или сил магнитного поля. Предпочтительно, блок носителя реагентов выполнен из пластика. Предпочтительные блоки носителя реагентов представляют собой сосуды или стержни, или комбинации указанных элементов.
Стержни могут содержать, например, магнитный элемент. Затем указанные магнитные стержни используют для захвата бусин, покрытых, например, антителами. Кроме того, возможно непосредственное покрытие немагнитных стержней, например, антителами.
С целью покрытия стержня антителами или антигенами, поверхность стержня может быть модифицирована соответствующим образом, известным из уровня техники.
Согласно первому аспекту настоящего изобретения, блок носителя реагентов, представляющий собой картридж сосудов или микропланшет, имеющий множество реакционных сосудов, содержащий соединительную часть для обеспечения разъемного соединения с соединительной частью (18) пипетирующей руки средств пипетирования лабораторного робота (1) для разъемного соединения пипетирующего наконечника, причем соединительная часть представляет собой сужающуюся выемку (36), имеющую внутреннюю поверхность с формой, соответствующей форме внешней поверхности соединительной части (18) пипетирующей руки для обеспечения соединения блока носителя реагентов с соединительной частью (18) пипетирующей руки за счет силы трения и/или посредством вакуума, прикладываемого с помощью пипетирующей руки, причем выемка (36) представляет собой отдельное глухое отверстие блока носителя реагентов, отличное от реакционного сосуда.
Помимо множества реакционных сосудов блок носителя реагентов может содержать реакционный сосуд или стержень для переноса реагентов.
Нижняя часть стержня обеспечивает фиксацию реагентов на поверхности стержня. Указанная фиксация может быть обеспечена вследствие поверхностных взаимодействий, таких как, например, покрытие или обеспечение связи. В другом варианте стержень может содержать магнитный элемент, в результате чего реагенты могут быть зафиксированы на поверхности стержней посредством магнитных бусин. Нижнюю часть называют "реакционной частью". Таким образом, стержень выполнен из материала, позволяющего обеспечить связь или покрытие стержня реагентами, такими как, например, антитела или антигены.
Блок носителя реагентов содержит соединительную часть для обеспечения разъемного соединения с соединительной частью пипетирующей руки средств пипетирования лабораторного робота.
Согласно настоящему изобретению блок носителя реагентов содержит глухое отверстие, соответствующее по форме соединительной части пипетирующей руки. Глухое отверстие представляет собой отдельное отверстие в соединительной части блока носителя реагентов.
Предпочтительно, глухое отверстие имеет коническую форму.
Второй аспект настоящего изобретения заключается в обеспечении адаптера для захвата блока носителя реагентов, содержащего:
- верхнюю соединительную часть для разъемного соединения адаптера с соединительной частью пипетирующей руки лабораторного робота, и
- нижнюю соединительную часть для разъемного соединения адаптера с блоком носителя реагентов.
Другой пример реализации настоящего изобретения представляет собой блок носителя реагентов, содержащий множество реакционных сосудов и адаптер для захвата блоков носителя реагентов, содержащий верхнюю соединительную часть для разъемного соединения адаптера со средствами пипетирования лабораторного робота и нижнюю соединительную часть для разъемного соединения адаптера с блоком носителя реагентов.
В одном из примеров реализации настоящего изобретения нижняя соединительная часть имеет внешнюю поверхность, имеющую форму, соответствующую форме внутренней поверхности блока носителя реагентов, подлежащего захвату, таким образом, что при введении нижних соединительных средств в блок носителя реагентов, блок носителя реагентов захвачен за счет сил трения.
В настоящем изобретении также раскрыты примеры реализации, в которых блок носителя реагентов может быть захвачен соединительной частью пипетирующей руки средств пипетирования лабораторного робота посредством сил трения.
В другом примере реализации блок носителя реагентов или адаптер могут быть захвачены путем их всасывания в ходе стандартного использования пипетирующей руки и/или могут быть высвобождены путем выталкивания воздуха из пипетирующей руки в ходе стандартного использования пипетирующей руки. Соответственно, соединительная часть пипетирующей руки упирается в соединительную часть блока носителя реагентов или адаптера с уплотнением. При втягивании воздуха из блока носителя реагентов или из адаптера образуется вакуум, удерживающий блок носителя реагентов относительно соединительной части пипетирующей руки непосредственно или посредством адаптера. Указанное соединение может быть вновь нарушено путем выталкивания воздуха из пипетирующей руки.
Указанная конструкция обеспечивает управляемый захват и высвобождение блоков носителя реагентов посредством обычного жидкостного манипулятора. Может быть использован любой жидкостный манипулятор. Исключена необходимость в механическом адаптировании жидкостного манипулятора для обеспечения возможности манипуляции блоками носителя реагентов посредством указанного манипулятора.
Другой пример реализации относится к блоку носителя реагентов с адаптером, в котором нижние соединительные средства адаптера содержат эластичный зажим, выполненный с целью захвата блока носителя реагентов путем зажима верхней части блока носителя реагентов.
Один из примеров реализации настоящего изобретения относится к блоку носителя реагентов с адаптером, в котором верхняя соединительная часть адаптера содержит выемку, имеющую форму внутренней поверхности, соответствующую форме внешней поверхности соединительной части пипетирующей руки.
Другой пример реализации согласно настоящему изобретению представляет собой блок носителя реагентов с адаптером, в котором верхняя соединительная часть содержит глухое отверстие, предпочтительно, глухое отверстие конической формы.
В других примерах реализации согласно изобретению верхняя соединительная часть блока носителя реагентов или адаптера может быть соединена с наконечником пипетки с возможностью отсоединения, предпочтительно, путем размещения наконечника пипетки в глухом отверстии.
Третий аспект настоящего изобретения представляет собой способ манипуляции блоком носителя реагента с использованием пипетирующего робота, содержащего подвижную пипетирующую руку, содержащую соединительную часть пипетирующей руки для разъемного соединения с пипетирующим наконечником, причем соединительную часть пипетирующей руки используют для захвата блока носителя реагентов так, что обеспечена возможность перемещения блока носителя посредством перемещения пипетирующей руки.
В другом примере реализации настоящего изобретения способ согласно изобретению включает перемещение блока носителя реагентов в целевую зону, где блок носителя реагентов высвобождают, причем высвобождение в целевой зоне может быть осуществлено посредством одного из нижеследующих этапов, согласно которым:
- размещают блок носителя реагентов ниже стопора так, что при. перемещении пипетирующей руки вверх блок носителя реагентов высвобождается из пипетирующей руки, или
- выполняют снятие.
Согласно другому примеру реализации настоящего изобретения, способ включает захват и/или высвобождение блока носителя реагентов посредством сил трения.
В другом примере реализации изобретения способ включает манипуляцию носителем реагентов, согласно которой блок носителя реагентов захватывают путем их всасывания в ходе стандартного использования пипетирующей руки и/или согласно которой блок носителя реагентов высвобождают путем выталкивания воздуха из пипетирующей руки в ходе стандартного использования пипетирующей руки. Однако не исключен вариант, в котором манипуляцию блоком носителя реагентов осуществляют посредством стандартного использования пипетирующей руки (в том, что касается всасывания и выталкивания воздуха или жидкости), причем силы трения полностью отсутствуют. Напротив, может возникать комбинация сил трения и вакуума.
Общим факторов для всех аспектов настоящего изобретения является тот факт, что пипетирование блока носителя реагентов и манипуляции с ним осуществляют посредством пипетирующей руки лабораторного робота. Манипуляция блоком носителя реагентов заключается в перемещении блока носителя реагентов из одной исходной зоны в целевую зону. Пипетирование и манипуляцию блоком носителя реагентов осуществляют путем выполнения блока носителя реагентов таким образом, что он может быть непосредственно связан с соединительной частью пипетирующей руки или путем обеспечения адаптера для соединения блока носителя реагентов с соединительной частью пипетирующей руки.
При использовании одной отдельной пипетирующей руки для пипетирования и манипуляции блоками носителя реагентов может быть значительно увеличена производительность стандартного лабораторного робота вследствие того, что пипетирующая рука может быть использована для пипетирования или для манипуляции блоком носителя реагентов, а в случае, если лабораторный робот содержит несколько пипетирующих рук, указанные пипетирующие руки могут быть использованы для пипетирования или манипуляции блоками носителя реагентов в крайне гибком режиме. Таким образом, использование пипетирующей руки может быть приспособлено к фактическим требованиям процедуры, выполняемой посредством лабораторного робота. При автоматической обработке биологических проб посредством лабораторного робота, зачастую возникают ситуации, в которых необходимы одновременные манипуляции несколькими блоками носителя реагентов, или необходимо одновременное пипетирование нескольких проб. Согласно настоящему изобретению, пипетирующие руки могут быть использованы для пипетирования и манипуляции блоками носителя реагентов, в результате чего подобные ситуации могут быть быстро разрешены вследствие того, что обеспечена одновременная манипуляция несколькими блоками носителя реагентов посредством нескольких пипетирующих рук, или обеспечено одновременное пипетирование нескольких проб несколькими из указанных пипетирующих рук. Следовательно, обеспечена возможность достижения значительно большей производимости по сравнению со стандартными лабораторными роботами и при использовании меньшего общего количества роботизированных рук вследствие того, что отсутствует необходимость в обеспечении отдельных роботизированных рук для пипетирования и для манипуляции блоками носителя реагентов.
Краткое описание чертежей
Настоящее изобретение более подробно описано ниже в виде примеров со ссылкой на сопутствующие чертежи, на которых:
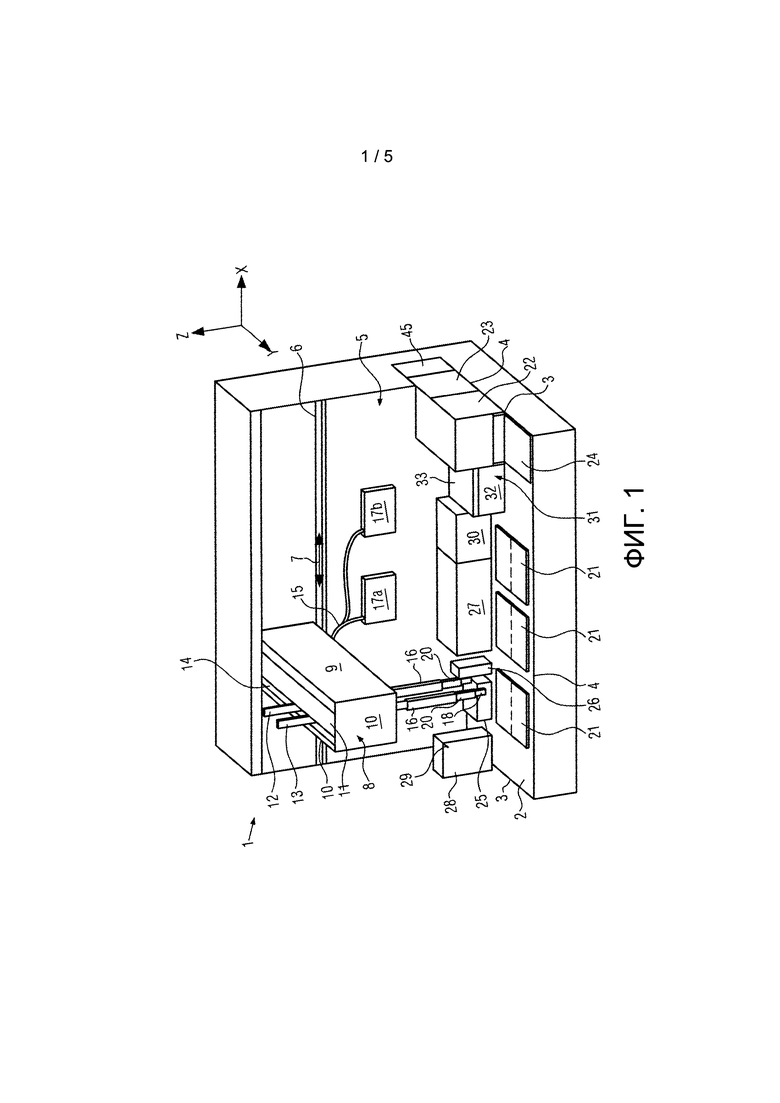
На фиг. 1 показан схематичный вид в перспективе лабораторного робота для пипетирования проб и манипуляции блоками носителя реагентов,
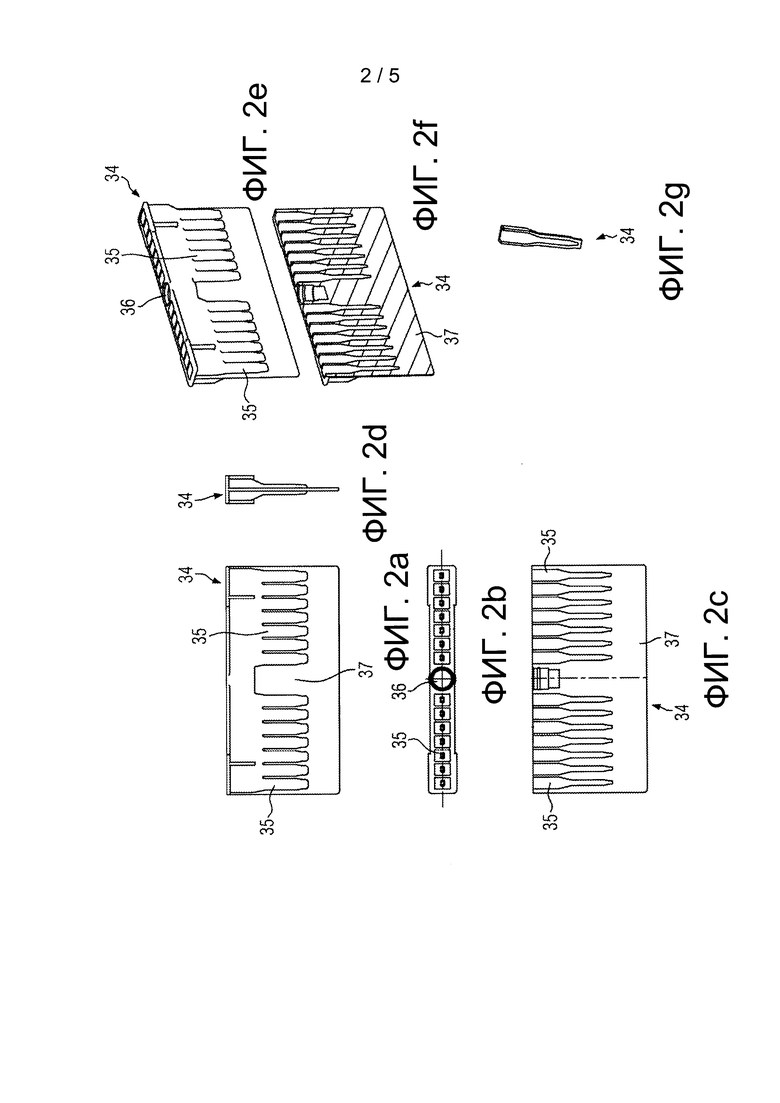
На фиг. 2а-g показаны различные виды картриджа сосудов,
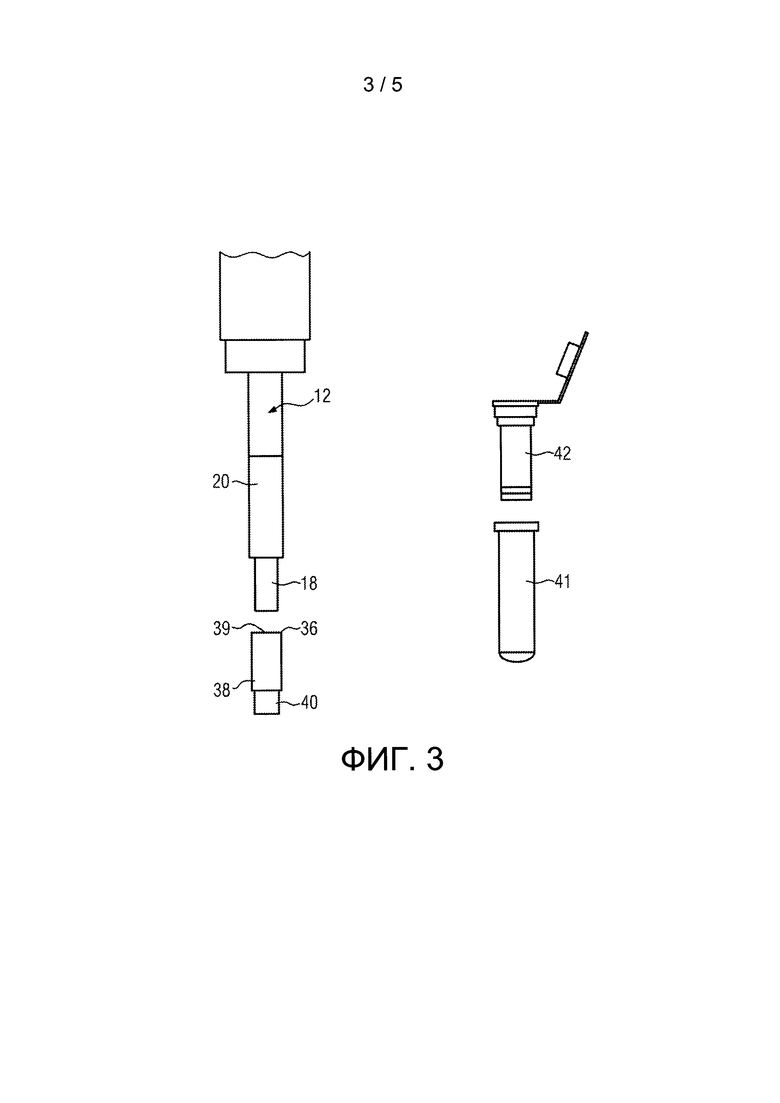
На фиг. 3 показан адаптер вкупе с соединительной частью пипетирующей руки и блоками носителя реагентов, и
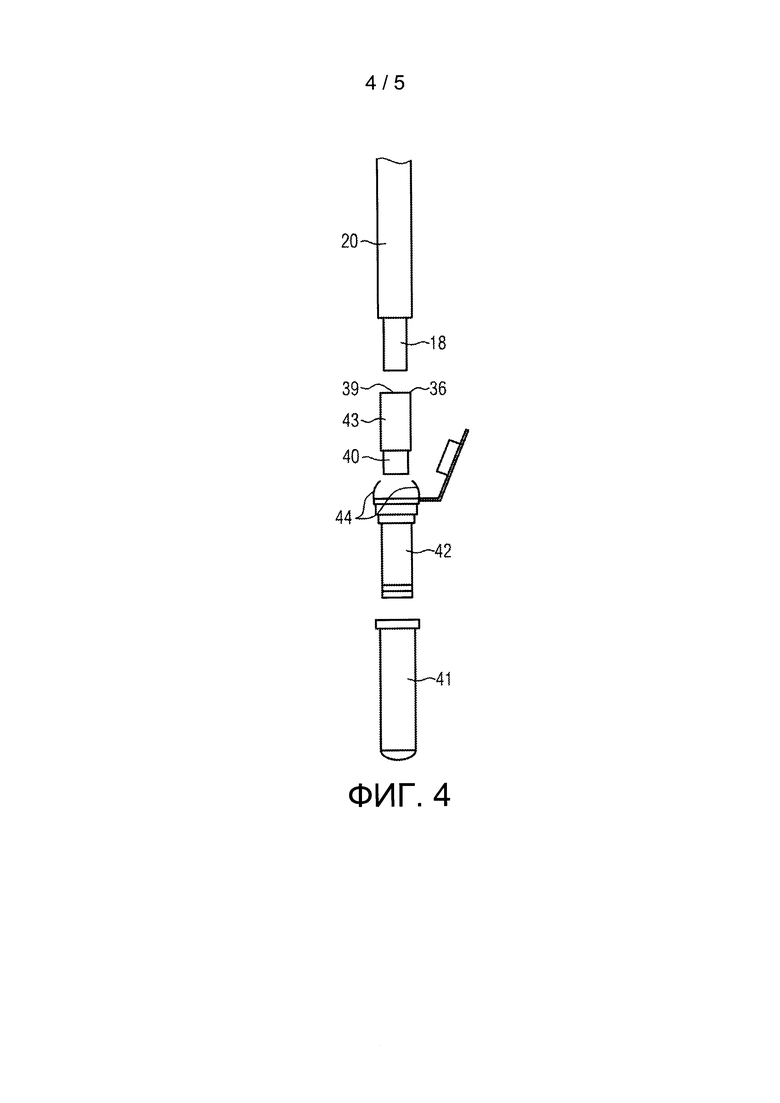
На фиг. 4 показан другой пример адаптера вкупе с соединительной частью пипетирующей руки и блоками носителя реагентов.
На фиг. 5a-d показаны различные виды стержней и пипетирующих наконечников для манипуляции стержнями, а также микропластиной.
Осуществление изобретения
Лабораторный робот 1 содержит прямоугольную рабочую поверхность 2, имеющую два торцевых края 3 и передний и задний продольные края 4. На заднем продольном крае 4 рабочей поверхности 2 выполнена задняя стенка 5. На части верхнего края задней стенки 5 выполнена горизонтальная направляющая 6, проходящая параллельно заднему продольному краю 4 рабочей поверхности 2. На направляющей 6 установлена роботизированная рука 8, перемещающаяся по направляющей в ее продольных направлениях (отмечены двойной стрелкой 7, направление X).
Роботизированная рука 8 расположена прямо и параллельно торцевым краям 3 рабочей поверхности 2, и соответственно, размещена перпендикулярно плоскости задней стенки 5. Роботизированная рука 8 задана снаружи двумя продольными стенками 9 и торцевой стенкой 10, выполненными на свободном конце руки, причем продольные стенки 9 и торцевая стенка 10 имеют U-образную форму при рассмотрении сверху. Между двумя продольными стенками 9 расположена направляющая 11. На направляющей 11 установлены две Z-руки 12, 13, перемещающиеся по направляющей в ее продольном направлении (направление Y). Каждая из двух Z-рук 12, 13 проходит вертикально сквозь зазор 14 между направляющей 11 и одной из указанных продольных боковых стенок 9.
Роботизированную руку 8 обеспечивают питанием с целью ее перемещения по направляющей 6 (направление X) и перемещения Z-рук 12, 13 по направляющей 11 (направление Y) и перпендикулярно ей (направление Z), в результате чего Z-руки 12, 13 могут покрывать по существу всю площадь (направление X, направление Y) над рабочей поверхностью 2 и выполнены с возможностью регулировки высоты (направление Z).
Настоящий пример реализации содержит одну роботизированную руку 8 и две Z-руки 12, 13. Роботизированная рука 8 может также содержать лишь одну Z-руку или более двух Z-рук, например, три, четыре, восемь или шестнадцать Z-рук. Также возможен вариант, в котором лабораторный робот 1 содержит несколько роботизированных рук 8, в частности, две роботизированные руки 8, которые предпочтительно перемещаются по одной направляющей 6.
Z-руки 12, 13 выполнены в виде пипетирующих рук 12, 13, и соответственно, пипетирующие руки 12, 13 содержат трубчатую часть 16, соединенную с двумя насосами 17а, 17b посредством гибкого рукава 15. Насос 17а представляет собой шприцевой насос для точного микрораспределения (1 мкл), а второй насос 17b представляет собой промывочный насос с большей пропускной способностью (например, свыше 100 мл/мин) по сравнению со шприцевым насосом 17а и может быть использован для промывания трубчатой части 16. Трубчатая часть 16 выполнена жесткой. Соединительная часть 18 пипетирующей руки выполнена на нижнем конце трубчатой части. Соединительная часть 18 пипетирующей руки выполнена с возможностью разъемного соединения пипетирующих наконечников 19 с пипетирующими руками 12, 13.
Соединительная часть 18 пипетирующей руки имеет внешнюю поверхность, по форме соответствующую внутренней поверхности пипетирующих наконечников 19. Следовательно, соединительная часть 19 пипетирующей руки может быть размещена в соответствующей выемке пипетирующего наконечника 19 при фиксации пипетирующего наконечника 19 к соединительной части 18 пипетирующей руки посредством сил трения.
Пипетирующая рука 12, 13 может содержать выполненный с возможностью вертикального перемещения рукав 20, окружающий соединительную часть 18 пипетирующей руки и выполненный с целью снятия пипетирующего наконечника 19, размещенного на соединительной части 18 пипетирующей руки. Рукав 20 приводят в действие посредством привода. В другом случае возможен вариант, в котором пипетирующий наконечник 19 удаляют с соединительных участков 18 пипетирующей руки таким образом, что пипетирующие наконечники 19 высвобождают путем вжатия пипетирующих наконечников 19 в горизонтальный стопор, в результате чего пипетирующий наконечник 19 наклоняется относительно соединительной части 18 пипетирующей руки и высвобождается. Другой возможный способ высвобождения пипетирующего наконечника 19 заключается в перемещении пипетирующего наконечника 19 ниже верхнего стопора, в результате чего пипетирующий наконечник 19 упирается в верхний стопор. При перемещении пипетирующей руки 12, 13 кверху, пипетирующий наконечник 19 высвобождается из пипетирующей руки 12, 13.
Другой вариант разъемного соединения пипетирующего наконечника 19 с соединительной частью 18 пипетирующей руки представляет собой вышеописанный механизм, содержащий растяжимое уплотнительное кольцо (технология CO-RE), разработанный компанией HAMILTON BONADUZ AG.
Z-руки роботизированной руки 8 могут быть перемещены по направляющей 11 независимо или синхронно, причем расстояние между Z-руками сохраняют неизменным, или расстояние между соседними Z-руками может быть синхронно увеличено или уменьшено.
На рабочей поверхности 2 выполнены крепления 21 блока носителя реагентов. Крепления 21 блока носителя реагентов представляют собой установленные элементы, выполненные с возможностью размещения на них блока носителя реагентов любого вида, такого как микропланшеты, картриджи сосудов, отдельные реакционные сосуды и/или стержни носителей реагентов. Микропланшеты, картриджи сосудов и/или отдельные реакционные сосуды точно фиксируют относительно рабочей поверхности 2, в результате чего зона каждого блока носителя реагентов и соответствующих сосудов точно задана и, соответственно, может быть с высокой точностью обнаружена пипетирующими руками 12, 13. Крепления 21 блока носителя реагентов задают подобное размещение блоков носителя реагентов относительно лабораторного робота 1. Крепления 21 блока носителя реагентов предпочтительно размещены на переднем продольном крае 4 рабочей поверхности 2 с целью содействия размещению на них блоков носителя реагентов персоналом лаборатории или другим лабораторным устройством, связанным с лабораторным роботом. Вдоль одного из указанных торцевых краев 3 выполнена центрифуга 22, соединенная со штабельным лифтом 23. Штабельный лифт 21 и центрифуга 22 содержат механизм 45 загрузки, имеющий гибкую продолговатую балку для продвижения и отведения микропланшета или носителя сосудов. Подобный носитель сосудов выполнен с целью приема микропланшета, одного или нескольких картриджей сосудов или одного или нескольких отдельных реакционных сосудов. Подобный механизм загрузки раскрыт в патенте ЕР 14152860.4. Приводный механизм гибкой продолговатой балки расположен сзади относительно центрифуги 22 и штабельного лифта 23, причем в вытянутом положении гибкая продолговатая балка проходит сквозь центрифугу 22 и сквозь штабельный лифт 21 к передней платформе 24 для загрузки и разгрузки блока носителя реагентов. Штабельный лифт 23 выполнен с целью хранения нескольких микропланшетов или носителей сосудов.
На задней части рабочей поверхности 2 выполнены химический резервуар 25, станция 26 мойки, магазин 27 наконечников пипеток для одноразовых наконечников 19 пипеток и щетка 28 для наконечников пипеток, выполненная с целью сметания одноразовых наконечников 19 пипеток. Одноразовые наконечники пипеток размещены в магазине 27 наконечников пипеток вертикально, в результате чего одна из пипетирующих рук 12, 13 подхватывает одноразовый наконечник 18 пипетки путем опущения соединительной части 18 пипетирующей руки в указанный магазин, причем по завершении использования одноразовый наконечник 18 пипетки сметают посредством щетки 28 для наконечников пипеток.
На щетке для наконечников пипеток выполнен выступающий в горизонтальном направлении указатель 29, выполненный из электропроводящего и гибкого материала. Одноразовые наконечники 19 пипеток, используемые в настоящем устройстве, выполнены из проводящего материала, такого как, например, пластик с графитовыми включениями.
После принятия нового одноразового наконечника 19 пипетки, указанный наконечник приводят в соприкосновение с указателем 29 или перемещают в точку поблизости от указателя 29. Указатель 29 связан со средствами датчика, обнаруживающими электрическую емкость, в результате чего система может "обнаруживать" факт наличия или отсутствия надлежащего соединения одноразового наконечника 19 пипетки с соединительной частью 18 пипетирующей руки.
При использовании многоразового наконечника пипетки, указанный наконечник может быть введен в станцию 26 мойки согласно предъявляемым требованиям между отдельными процедурами пипетирования, и может быть очищен путем обильного промыва водой посредством промывочного насоса 17b.
Магазин 30 адаптеров для манипуляции блоками носителя реагентов выполнен на рабочей поверхности 2. Адаптеры размещены в магазине 30 адаптеров вертикально, в результате чего пипетирующие руки 12, 13 подхватывают адаптер 38 путем опущения соединительной части 18 пипетирующей руки в указанный магазин. Адаптеры 38 более подробно раскрыты в нижеприведенном описании.
В резурвуаре 25 для химикатов расположено несколько сосудов, открытых сверху и содержащих различные химические вещества. Сосуды резервуара 25 для химикатов могут быть закрыты посредством крышек, удаляемых и повторно размещаемых посредством соответствующего адаптера для привода крышек, который может быть соединен с соединительной частью 18 пипетирующей руки с возможностью отсоединения.
На рабочей поверхности 2 выполнен бак 31 термоциклирования. Бак 31 термоциклирования состоит из корпуса 32 основания, открытого сверху, который может быть закрыт посредством автоматизированной крышки 33. В баке 31 термоциклирования выполнены нагревательные и охладительные элементы, обеспечивающие возможность установления заданной температуры во внутренней части бака. Также обеспечена возможность конфигурирования заданных температурных профилей посредством указанных нагревательных и охладительных элементов. Предпочтительно, в качестве нагревательного и охладительного элемента использован элемент Пельтье, выполненный с возможностью удаления и подачи тепла. Стандартные температурные пределы для одного из подобных термоциклов составляют от -5°С до 120°С, а скорость нагревания/охлаждения может составлять от 2°С в секунду до 10°С в секунду.
Лабораторный робот содержит блок управления (не показан) для управления перемещением Z-рук 12, 13, а также индивидуальными функциональными элементами, такими как насосы 17а, 17b, центрифуга 22, штабельный лифт 23 и бак 31 термоциклирования. Блок управления представляет собой управляемое микроконтроллерами устройство и выполнен в виде многозадачного контроллера, т.е. контроллера, выполненного с возможностью реализации мониторинга нескольких управляющих действий одновременно.
На фиг. 2а-2g показаны несколько видов картриджа сосудов, содержащего несколько реакционных сосудов 35, расположенных в ряд. Картридж 34 сосудов выполнен из прозрачного пластикового материала, такого как полипропилен, полиэтилен или поликарбонат. Реакционные сосуды 35 расположены параллельно друг другу и открыты на верхнем крае картриджа 34 сосудов. В средней части картриджа сосудов выполнена выемка 36, имеющая форму внутренней поверхности, соответствующую форме внешней поверхности соединительной части 18 пипетирующей руки. В данном случае выемка 36 имеет внутренний диаметр 3-6 мм, причем выемка незначительно сужена книзу. Выемка 36 открыта в направлении к верхнему краю картриджа 34 сосудов. Пример реализации картриджа 34 сосудов по фиг. 2а-2g содержит промежуточную стенку 37 между реакционными сосудами 35, проходящую ниже нижнего конца реакционного сосуда 35. Картридж 34 сосудов может также быть выполнен без подобной промежуточной стенки, и в этом случае реакционные сосуды соединены друг с другом лишь на верхней части. Картридж 34 сосудов подобного вида может быть размещен в рабочем креплении 21, которое также подходит для размещения в нем микропланшета.
Одна из пипетирующих рук 12, 13 может просто подхватить подобный картридж 34 сосудов путем опущения соединительной части 18 пипетирующей руки в выемку 36. Затем сосуд 34 неподвижно крепят к соединительной части 18 пипетирующей руки посредством сил трения. Сосуд 34 также может быть прикреплен к соединительной части 18 пипетирующей руки посредством вакуума, образуемого пипетирующей рукой. Вакуум может быть использован вместо силы трения или в дополнение к ней. Соответственно, выемка 36 образует соединительную часть реакционного сосуда. Соединение между соединительной частью 18 пипетирующей руки и выемкой 36 или соединительной частью 36 реакционного сосуда может быть прервано сходным с используемым для наконечников пипеток образом, т.е. путем вжатия картриджа 34 сосудов в горизонтальный стопор, в результате чего картридж сосудов наклоняется относительно соединительной части 18 пипетирующей руки и высвобождается, или путем перемещения картриджа 34 сосудов ниже верхнего стопора, в результате чего картридж 34 сосудов упирается в верхний стопор. При перемещении пипетирующей руки 12, 13 кверху, картридж 34 сосудов высвобождается из пипетирующей руки 12, 13. Соединение между соединительной частью 18 пипетирующей руки и выемкой 36 или соединительной частью 36 реакционного сосуда может быть прервано путем сброса вакуума.
В настоящем примере реализации выемка 36 выполнена в средней части картриджа 34 сосудов, в результате чего с обеих сторон от выемки 36 выполнено одинаковое количество реакционных сосудов 35. Выемка 36 может также быть расположена со смещением от центра картриджа 34 сосудов, в частности, в концевой части картриджа 34 сосудов. По существу, также может быть выполнен картридж сосудов с несколькими выемками 36.
Также может быть выполнен микропланшет, содержащий несколько реакционных сосудов, расположенных в виде двухмерной матрицы с подобной выемкой 36, образующей соединительную часть реакционного сосуда. Выемка может быть расположена в центре микропланшета и/или на одной или нескольких угловых частях микропланшета.
В предпочтительном примере реализации пипетирующие руки 12, 13 содержат выполненный с возможностью вертикального перемещения рукав 20, позволяющий снимать блок носителя реагентов, соединенный посредством указанной выемки 36 с соединительной частью 18 пипетирующей руки, в определенный момент времени и в определенном местоположении. При использовании подобных средств 20 высвобождения блок носителя реагентов может быть размещен в любом местоположении на рабочей поверхности 2 без необходимости использования стопора или любых других средств.
На фиг. 3 показан адаптер 38. В настоящем примере реализации адаптер 38 имеет базовую форму небольшой полой трубки. Верхняя часть адаптера 38 образует верхнюю соединительную часть 39, причем форма внутренней поверхности верхней соединительной части 39 соответствует форме внутренней поверхности вышеописанной выемки 36.
Нижняя часть адаптера 38 образует нижнюю соединительную часть 40 для разъемного соединения адаптера 38 со стандартным реакционным сосудом 41. На фиг. 3 также показаны два примера реализации подобных стандартных сосудов 41. Нижняя соединительная часть 40 имеет внешнюю поверхность, имеющую форму, соответствующую форме внутренней поверхности реакционных сосудов определенного вида, таких как реакционные сосуды 41, в результате чего при введении нижней соединительной части 40 в подобный реакционный сосуд 41, силы трения соединяют реакционный сосуд 41 с адаптером 38.
Подобный адаптер 38 может быть соединен с блоком носителя реагентов любого вида, таким как отдельные реакционные сосуды, картриджи сосудов или микропланшеты. Адаптер также может быть связан с блоком 42 фильтра, который может быть размещен в реакционном сосуде 41. Подобные адаптеры могут быть соединены с соответствующими блоками носителя реагентов на постоянной основе. Вследствие того, что адаптеры 38 образуют полые трубки, реакционные сосуды, к которым присоединен адаптер 38, по-прежнему пригодны для пользования. При некоторых обстоятельствах предпочтительно удалить адаптер 38 из блока носителя реагентов. Например, вышеуказанное справедливо в случае, если микропланшет подлежит размещению в баке 31 термоциклирования. Удаление адаптера 38 из блока носителя реагентов может быть осуществлено посредством второй Z-руки 13, 12, соприкасающейся с блоком носителя реагентов сверху, в результате чего перемещение соединенной с блоком носителя реагентов посредством адаптера 38 Z-руки 12, 13 кверху приводит к удалению адаптера 38 из блока носителя реагентов. Для обеспечения надежности указанного процесса удаления адаптер 38 выполнен таким образом, что сила трения между нижней соединительной частью 40 и блоком носителя реагентов меньше, чем сила трения между верхней соединительной частью 39 и соединительной частью 18 пипетирующей руки. Таким образом, предпочтительно, верхняя соединительная часть 39 длиннее в вертикальном направлении, чем нижняя соединительная часть 40. С другой стороны, прижимное соединение между верхней соединительной частью 39 и соединительной частью 18 пипетирующей руки предпочтительно плотнее по сравнению с прижимным соединением между нижней соединительной частью 40 и соответствующим реакционным сосудом.
Адаптер 38 также может быть удален путем размещения блока носителя реагентов ниже верхнего стопора и путем перемещения соответствующей Z-руки 12, 13 кверху. Кроме того, адаптер 38 может быть удален путем сброса вакуума.
Адаптеры 38 могут быть использованы в качестве одноразовых инструментов и могут быть сметены посредством щетки 28 для пипеток после каждого использования. Адаптеры 38 могут также быть использованы повторно и могут быть заменены после каждого использования с размещением в магазине 30 адаптеров. Подобное повторное использование адаптеров 38 полезно в случае, если реакционные сосуды, с которыми соединен адаптер 38, не используют при проведении биологической или химической процедуры, осуществляемой посредством лабораторного робота 1. В случае, если блок носителя реагентов содержит несколько реакционных сосудов, адаптер 38 предпочтительно соединен с одним из реакционных сосудов, не используемым для выполнения биологической или химической реакции.
Предпочтительно, для манипуляции блоками носителя реагентов различных видов обеспечены адаптеры 38 различных видов. Адаптеры различных видов могут быть размещены в магазине 30 адаптеров. Таким образом, обеспечена возможность манипуляции блоками носителя реагентов различного вида посредством одной Z-руки 12, 13. 1Указанный подход позволяет обеспечить высокую степень гибкости работы лабораторного робота 1.
Вышеописанный рукав 20 Z-руки 12, 13 или пипетирующей руки 12, 13 также обладает преимуществами при высвобождении подобного адаптера из соединительной части 18 пипетирующей руки. Указанные средства высвобождения позволяют высвобождать адаптер 38 (с блоком носителя реагентов или без него) из соответствующей пипетирующей руки 12, 13 в любой момент времени и в любом местоположении на рабочей поверхности 2.
Вышеописанный адаптер 38 выполнен в виде полой трубки со свободным просветом от верхней стороны до нижней стороны. При использовании подобного адаптера блок носителя реагентов может быть захвачен путем образования вакуума в результате высасывания воздуха посредством пипетирующей руки. Адаптер неподвижно прикреплен к пипетирующей руке посредством сил трения, а блок носителя реагентов удерживают относительно адаптера посредством вакуума.
Адаптер 38 также может быть выполнен с горизонтальной стенкой, в частности, в нижней соединительной части 40, закрывающей канал в адаптере 38. Подобный адаптер 38 выполняет функцию крышки для реакционного сосуда. Другими словами, обеспечена крышка для закрытия или герметизации заданного реакционного сосуда, которая одновременно образует адаптер 38 для обеспечения соединения с соединительной частью 18 пипетирующей руки. Подобный адаптер может быть удержан относительно пипетирующей руки путем образования вакуума. В комбинации со средствами высвобождения 20, адаптер 38 может также быть использован для. герметизации одного или нескольких реакционных сосудов блока носителя реагентов.
На фиг. 4 показан адаптер другого вида, по существу соответствующий адаптеру по фиг. 3 и всем его вариациям, за исключением конструкции нижней соединительной части 40. Указанный адаптер 43 содержит эластичный зажим 44, выполненный с целью захвата реакционного сосуда или блока фильтра путем зажима верхней части реакционного сосуда или блока фильтра. Эластичный зажим защелкивается на реакционном сосуде при его нажатии на реакционный сосуд книзу. Указанное соединение между реакционным сосудом и адаптером 43 выполнено без возможности отсоединения.
Вышеописанные средства захвата реакционного сосуда обладают следующими преимуществами:
1. Известные захваты преимущественно выполнены в виде вилки с двумя зажимами, сводимыми при захвате блока носителя реагентов. При захватывании блока носителя реагентов подобным вильчатым захватом, блок может быть кантован. При использовании примеров реализации настоящего изобретения, в которых соединительную часть 18 пипетирующей руки или адаптер 38 вводят в соответствующую выемку, блок носителя реагентов автоматически выравнивают и безопасно захватывают.
2. Обеспечены единые средства захвата для наконечников пипеток, микропланшетов, картриджей сосудов и отдельных реакционных сосудов, таких как трубки и стержни.
3. Блоки носителя реагентов могут быть внесены в соответствующие выемки на большую глубину вследствие отсутствия каких-либо вильчатых элементов захвата, упирающихся в выемки. Указанная конфигурация обладает особым преимуществом при использовании картриджей сосудов в виде гелевых картриджей, зачастую размещаемых в средствах охлаждения. Активная охлаждающая поверхность может доходить до более высокой части реакционных сосудов картриджа сосудов по сравнению с возможностями средств охлаждения в комбинации с роботизированным инструментом захвата, известным из уровня техники.
4. Зачастую необходимо оптическое сканирование реакционных сосудов. Вильчатые захваты закрывают значительные участки реакционных сосудов, недоступные для осуществления оптического сканирования. Средства захвата по настоящему изобретению не закрывают внешнюю поверхность блоков носителя реагентов и не мешают оптическому обнаружению.
5. Простые роботизированные средства могут быть использованы для одновременных манипуляции и пипетирования реакционных сосудов. В вышеописанном примере роботизированные средства содержат одну роботизированную руку, с которой соединены две Z-руки. Известные роботизированные руки содержат несколько шарниров, причем указанные роботизированные руки могут быть автоматически согнуты на каждом из шарниров. При использовании указанных роботизированных рук может быть обеспечена гибкая система вследствие того, что несколько роботизированных рук могут быть одновременно использованы на одной рабочей поверхности, причем каждая из роботизированных рук удерживает инструмент отличного вида. Однако роботизированные руки указанного вида являются крайне дорогими и сложными в программировании и обучении. Вследствие того, что в настоящем изобретении лабораторный робот содержит пипетирующие руки, которые могут быть использованы для пипетирования и манипуляции, или для других целей посредством дополнительного адаптера, для обеспечения множества различных функций настоящему лабораторному роботу необходима пипетирующая рука лишь одного вида. Это позволяет минимизировать механические усилия и усилия, необходимые для управления пипетирующими руками.
6. Блоки носителя реагентов согласно настоящему изобретению и адаптеры позволяют использовать стандартные устройства, предназначенные исключительно для пипетирования, и для манипуляции блоками носителя реагентов. Таким образом, может быть значительно расширена функция стандартных устройств. Захват блоков носителя реагентов даже не требует применения отличного способа работы пипетирующих роботов. Напротив, роботы могут быть использованы для захвата устройств при выполнении стандартных рабочих приемов отсоса и продувания.
7. Лабораторные роботы зачастую содержат четыре или восемь пипетирующих рук, расположенных в ряд. Указанные пипетирующие руки могут быть использованы для одновременной манипуляции четырьмя или восемью картриджами сосудов. Указанная конфигурация обеспечивает значительное ускорение процесса обработки картриджей сосудов.
8. Набор стандартов при разработке наконечников пипеток довольно мал. Адаптеры и/или выемки реакционных сосудов должны соответствовать лишь известным стандартам. Таким образом, с известными из уровня техники пипетирующими руками может быть соединено малое число адаптеров.
Вышеописанный пример лабораторного робота содержит Z-руки 12, 13, выполненные без возможности поворота. Также возможен вариант выполнения Z-рук с возможностью поворота, в частности, с возможностью поворота на угол в 90°. Указанный поворот позволяет поворачивать блоки носителя реагентов. Указанная конфигурация позволяет обеспечивать различные положения для чувствительных к направлению элементов, таких как камера для оптического обнаружения или средства обработки для обработки содержимого реакционных сосудов картриджа сосудов или микропланшета. Соответственно, расположение функциональных процессов и устройств на рабочей поверхности выполнено более гибким.
Кроме того, поворот пипетирующей руки также позволяет использовать байонетный соединитель для соединения пипетирующей руки с адаптером или с блоком носителя реагентов. В подобном случае пипетирующая рука и выемка адаптера или блока носителя реагентов, соответственно, должны быть выполнены в виде охватываемой части или охватывающей части байонетного соединителя.
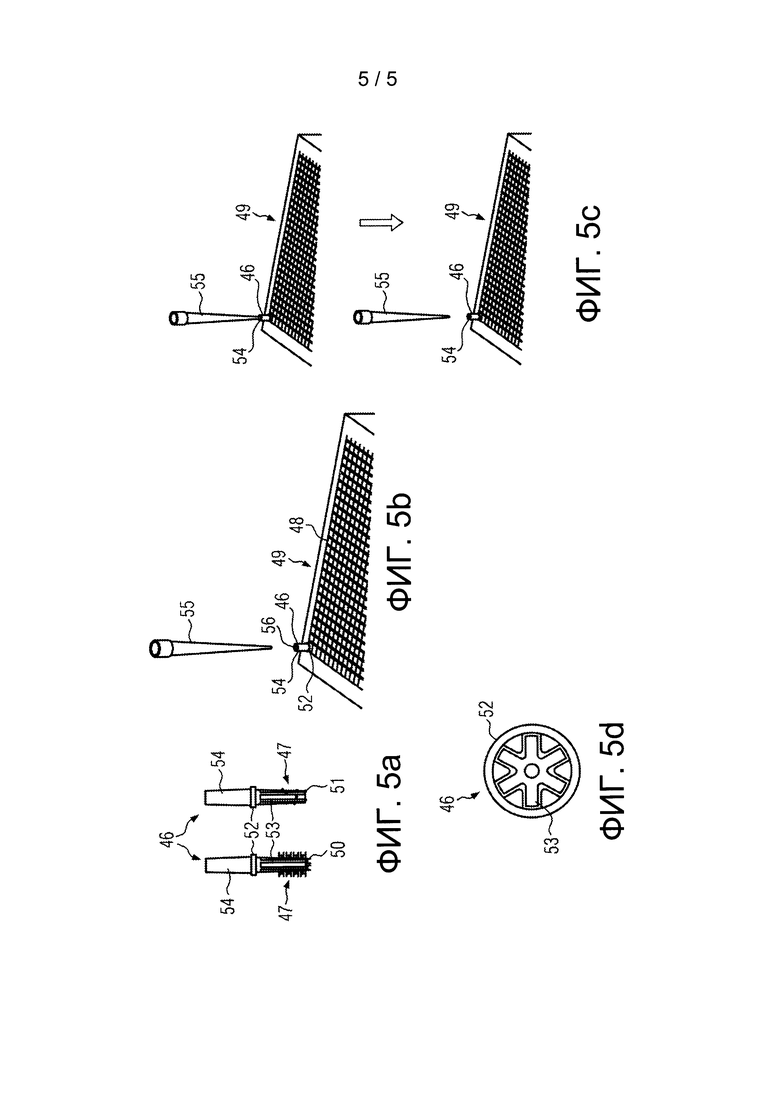
Настоящее изобретение может быть дополнительно использовано для обеспечения более быстрого выполнения экспериментов с использованием системы стержней для захвата целевой молекулы (фиг. 5a-d).
Таким образом, согласно альтернативному варианту настоящего изобретения для переноса реагентов используют стержни. Указанные стержни также могут быть использованы при выполнении ручной работы или вкупе с роботом, содержащим захват для захвата указанных стержней.
Система стержней содержит стержни 46, которые могут быть магнитными или немагнитными (фиг. 5а). Конструкция стержней 46 должна соответствовать нескольким техническим требованиям. Диаметр части стержня, размещаемой в реакционном сосуде 47, должен быть подогнан к диаметру реакционного сосуда 48 (фиг. 5b). Стержни могут быть использованы для отдельных реакционных сосудов или для планшетов 49 микротитратора с 96, 384 или большим числом сосудов. Соответственно, диаметр указанной части стержня должен быть меньшим по сравнению с диаметром сосуда, но не долен быть излишне малым во избежание "болтания" стержня внутри сосуда.
Кроме того, стержень не должен ни коим образом соприкасаться со стенками реакционного сосуда вследствие того, что подобное соприкосновение может приводить к удалению связанных антител 50 или антигенов 51 на стержне. По этой причине стержень содержит выступ 52, причем выступ расположен над частью стержня, располагаемой внутри сосуда 47. Указанная конфигурация позволяет предотвратить дальнейшее продвижение стержня в сосуд и соприкосновение стержня с нижней частью (стенками или дном) сосуда. Указанный выступ 52 может иметь, например, форму кольца, или может представлять собой лишь один или несколько небольших выступов.
Часть стержня, размещаемая в сосуде, может иметь любую форму, позволяющую разместить его в сосуде. Например, указанная форма может быть цилиндрической или конической. С целью дополнительного увеличения площади поверхности указанной части стержня, он может иметь, например, крестообразную или звездчатую форму (фиг. 5d). Для увеличения площади поверхности стержня подходят и другие формы, такие как, например, вертикальные гребни 53 или края.
Стержни, предназначенные для экспериментов указанного вида, могут содержать, например, магнитный элемент. Затем указанные магнитные стержни используют для захвата бусин, покрытых, например, антителами. Кроме того, возможно непосредственное покрытие немагнитных стержней, например, антителами.
С целью покрытия стержня антителами или антигенами, поверхность стержня может быть модифицирована соответствующим образом, известным из уровня техники.
Верхняя часть стержня 54, расположенная над сосудом после размещения стержня внутри сосуда, выполнена с возможностью переноса стержня посредством (стандартного) наконечника 55 пипетки (фиг. 5с), который может быть соединен с соединительной частью пипетирующей руки. Предпочтительная конструкция содержит глухое отверстие 56 на верхней части стержня, имеющее размеры, позволяющие разместить в нем (стандартный) наконечник пипетки на глубину в несколько миллиметров, например, от 1 до 12 мм. В зависимости от используемых наконечников (например, от 1000 мкл до 1 мкл), наконечник входит в глухое отверстие на различную глубину. При размещении наконечника внутри отверстия с приложением давления, ствол наконечника должен более плотно прилегать к самой пипетке по сравнению с плотностью прилегания наконечника к отверстию стержня. В противном случае наконечник застрянет в стержне.
Для переноса стержня предпочтительно, если отверстие выполнено в виде сужающегося глухого отверстия. Таким образом, при размещении наконечника в отверстии, отверстие образует герметичное уплотнение. После размещения внутри отверстия, пипетка может образовывать вакуум внутри отверстия путем отведения воздуха посредством стандартного принципа работы пипетки. Вакуум будет удерживать стержень на наконечнике пипетки, и стержень может быть перенесен, например, в следующий реакционный сосуд. Для высвобождения стержня воздух выталкивают посредством стандартного принципа работы пипетки при выталкивании любой жидкости. Таким образом, стержень будет высвобожден из наконечников пипеток и может, например, проходить в реакционный сосуд до тех пор, пока выступ 62 не остановит его продвижение.
Стандартные устройства захвата обычно захватывают устройства по боковой стенке. Указанный принцип обусловлен необходимостью в пространстве для захвата устройством захвата каждого отдельного устройства. При размещении стержней в каждом отдельном сосуде микропланшета, одновременный захват стержней для каждого сосуда является практически нереализуемым. Согласно настоящему механизму, при использовании пипеток вкупе с наконечниками в качестве устройств захвата, в реакционных лунках может быть размещено количество стержней, соответствующее количеству наконечников пипеток, которое может быть удержано устройством пипетирования. Кроме того, в комбинации с системой стержней могут быть использованы отдельные выбранные сосуды на одном планшете, в то время как другие сосуды могут быть оставлены неиспользуемыми.
Широко используемые пипетирующие роботы могут нести максимум 96 стандартных наконечников пипеток. Указанное число ограничено вследствие размера реакционных лунок и диаметра наконечника пипетки на его верхнем конце в точке соединения с пипетирующим устройством. Существуют пипетирующие руки, несущие более 96 наконечников, например, 384 наконечника, однако в указанных устройствах используют особые дорогие наконечники. Для манипуляции раскрытыми в настоящем описании стержнями в большем (чем 96) количестве необходимо использование дорогих специальных наконечников или (вследствие того, что конструкция указанных стержней позволяет манипулировать стандартными наконечниками пипеток и стандартной пипеточной головкой с 96 каналами) стержни необходимо перемещать четыре раза с целью заполнения 384 стержнями целого планшета с 384 сосудами. Однако указанные этапы не занимают много времени, и соответственно, не замедляют процесс выполнения эксперимента в значительной степени. Например, стержни могут быть перемещены в подогнутом виде для размещения стержня, например, в каждый второй сосуд пластины из 384 сосудов. Даже манипуляция более чем 384 стержнями для планшетов с большим количеством сосудов может быть реализована и требует лишь адаптации размера стержня в соответствии с размером сосуда.
Соответственно, стержни и удобный способ манипуляции ими посредством наконечников пипеток обеспечивают быструю манипуляцию большим количеством стержней, которая может быть легко автоматизирована без дополнительных затрат на приобретение специальных наконечников или пипетирующих устройств.
Сосуды могут быть заполнены различными жидкими пробами с целью осуществления быстрого тестирования нескольких проб на одном планшете путем использования стержней, покрытых идентичными или различными антителами или антигенами.
После осуществления покрытия стержней или сбора покрытых бусин, стержни размещают в реакционном сосуде, содержащем соответствующую жидкую пробу.
При переносе стержня из одного реакционного сосуда в следующий (в зависимости от выполняемого эксперимента, может быть необходимо осуществление множества переносов) нежелателен перенос остаточной жидкой пробы. Соответственно, стержень может быть размещен в пустом реакционном сосуде, который может быть размещен в центрифуге согласно настоящему изобретению. В результате выполнения этапа центрифугирования, в ходе которого отверстие реакционного сосуда направлено внутрь в радиальном направлении, нежелательная остаточная жидкость может быть легко удалена со стержня перед переносом стержня в следующий реакционный сосуд.
В результате вышеуказанной процедуры, количество переносимой нежелательной остаточной жидкости может быть значительно снижено, что приводит к улучшению условий осуществления реакции.
Настоящее изобретение обеспечивает быструю и удобную манипуляцию отдельными стержнями, которая может быть в полной мере автоматизирована и внедрена в автоматизированный поточный процесс.
Список условных обозначений
1. Лабораторный робот
2. Рабочая поверхность
3. Торцевой край
4. Продольный край
5. Задняя стенка
6. Направляющая
7. Двойная стрелка
8. Роботизированная рука
9. Продольная стенка
10. Торцевая стенка
11. Направляющая
12. Z-рука
13. Z-рука
14. Зазор
15. Рукав
16. Трубчатая часть
17а. Шприцевой насос
17b. Промывочный насос
18. Соединительная часть пипетирующей руки
19. Пипетирующий наконечник
20. Рукав
21. Рабочее крепление
22. Центрифуга
23. Штабельный лифт
24. Передняя платформа
25. Резервуар для химикатов
26. Станция мойки
27. Магазин наконечников пипеток
28. Щетка для наконечников пипеток
29. Указатель
30. Магазин адаптеров
31. Бак термоциклирования
32. Корпус основания
33. Автоматическая крышка
34. Картридж сосудов
35. Реакционный сосуд
36. Выемка
37. Промежуточная стенка
38. Адаптер
39. Верхняя соединительная часть
40. Нижняя соединительная часть
41. Реакционный сосуд
42. Блок фильтра
43. Адаптер
44. Эластичный зажим
45. Механизм загрузки
46. Стержень
47. Нижняя часть стержня
48. Реакционный сосуд
49. Планшет микротитратора
50. Антитело
51. Антиген
52. Выступ
53. Гребни / края
54. Верхняя часть стержня
55. Схематичное изображение наконечника пипетки
56. Глухое отверстие
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРИФУГА ДЛЯ ЦЕНТРИФУГИРОВАНИЯ БЛОКА РЕАКЦИОННЫХ ЯЧЕЕК И СПОСОБ | 2014 |
|
RU2672746C2 |
| ПЛАНШЕТ И СПОСОБ ВЫСОКОПРОИЗВОДИТЕЛЬНОГО СКРИНИНГА | 2002 |
|
RU2296619C2 |
| СИСТЕМА ОЦЕНКИ ПОДГОТОВКИ ВЕЩЕСТВА | 2017 |
|
RU2762936C2 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ И СИСТЕМА ДЛЯ ПОЛУЧЕНИЯ И ПРИГОТОВЛЕНИЯ ОБРАЗЦА МИКРООРГАНИЗМА КАК ДЛЯ ИДЕНТИФИКАЦИИ, ТАК И ДЛЯ ТЕСТОВ НА ЧУВСТВИТЕЛЬНОСТЬ К АНТИБИОТИКАМ | 2016 |
|
RU2718086C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ПИПЕТКИ, СПОСОБ ПИПЕТИРОВАНИЯ, ПИПЕТИРУЮЩЕЕ УСТРОЙСТВО И УЗЕЛ ВСАСЫВАЮЩЕЙ ТРУБКИ ДЛЯ ПИПЕТИРУЮЩЕГО УСТРОЙСТВА | 2009 |
|
RU2518045C2 |
| СИСТЕМЫ И СПОСОБЫ МНОГОСТОРОННЕГО АНАЛИЗА | 2012 |
|
RU2627927C2 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ПЕРЕНОСА РЕАГЕНТА В БЛОК АНАЛИЗА | 2013 |
|
RU2669767C2 |
| МНОГОКАНАЛЬНОЕ ПИПЕТИРУЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2179887C1 |
| УСТРОЙСТВО СОПРЯЖЕНИЯ МЕЖДУ ЛАБОРАТОРНОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМОЙ И ПЛАТФОРМОЙ ДЛЯ ОБРАБОТКИ РАСХОДНЫХ МАТЕРИАЛОВ И ЖИДКОСТЕЙ В ОБЛАСТИ МОЛЕКУЛЯРНОЙ БИОЛОГИИ | 2013 |
|
RU2633402C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫДЕЛЕНИЯ КОМПОНЕНТОВ В ЖИДКОМ ОБРАЗЦЕ С ПОМОЩЬЮ МАГНИТНЫХ ЧАСТИЦ | 2016 |
|
RU2721121C1 |
Изобретение относится к измерительной технике и может быть использовано для тестирования жидкой пробы. Заявлен блок носителя реагентов, представляющий собой картридж сосудов или микропланшет, имеющий множество реакционных сосудов, содержащий соединительную часть для обеспечения разъемного соединения с соединительной частью (18) пипетирующей руки средств пипетирования лабораторного робота (1) для разъемного соединения пипетирующего наконечника. Причем соединительная часть представляет собой сужающуюся выемку (36), имеющую внутреннюю поверхность с формой, соответствующей форме внешней поверхности соединительной части (18) пипетирующей руки для обеспечения соединения блока носителя реагентов с соединительной частью (18) пипетирующей руки за счет силы трения и/или посредством вакуума, прикладываемого с помощью пипетирующей руки. При этом выемка (36) представляет собой отдельное глухое отверстие блока носителя реагентов, отличное от реакционного сосуда. Также предложен способ манипуляции блоком носителя реагентов с использованием пипетирующего робота, содержащего подвижную пипетирующую руку, содержащую соединительную часть (18) пипетирующей руки для разъемного соединения с пипетирующим наконечником (19, 55). Причем соединительную часть (18) пипетирующей руки используют для захвата блока носителя реагентов в выемке так, что обеспечена возможность перемещения блока носителя реагентов посредством перемещения пипетирующей руки. При этом блок носителей реагентов представляет собой картридж сосудов или микропланшет, имеющий множество реакционных сосудов, а выемка (36) представляет собой отдельное глухое отверстие блока носителя реагентов, отличающееся от реакционного сосуда. Технический результат - повышение функциональных возможностей. 2 н. и 10 з.п. ф-лы, 14 ил.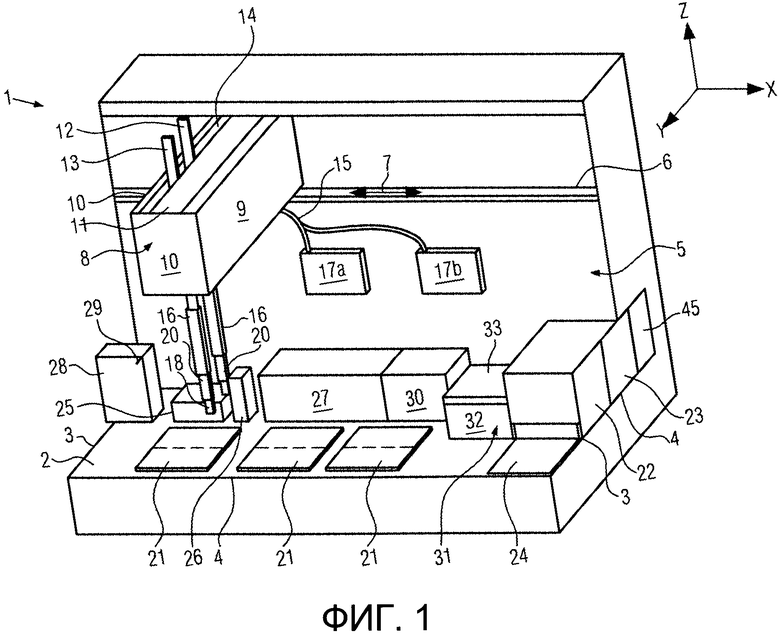
1. Блок носителя реагентов, представляющий собой картридж сосудов или микропланшет, имеющий множество реакционных сосудов, содержащий
соединительную часть для обеспечения разъемного соединения с соединительной частью (18) пипетирующей руки средств пипетирования лабораторного робота (1) для разъемного соединения пипетирующего наконечника,
причем соединительная часть представляет собой сужающуюся выемку (36), имеющую внутреннюю поверхность с формой, соответствующей форме внешней поверхности соединительной части (18) пипетирующей руки для обеспечения соединения блока носителя реагентов с соединительной частью (18) пипетирующей руки за счет силы трения и/или посредством вакуума, прикладываемого с помощью пипетирующей руки, причем выемка (36) представляет собой отдельное глухое отверстие блока носителя реагентов, отличное от реакционного сосуда.
2. Блок носителя реагентов по п. 1, в котором
блок носителя реагентов содержит адаптер (38) для захвата блоков носителя реагентов, содержащий верхнюю соединительную часть (39) для разъемного соединения адаптера (38) со средствами пипетирования лабораторного робота (1) и нижнюю соединительную часть (40) для разъемного соединения адаптера (38) с блоком носителя реагентов.
3. Блок носителя реагентов п. 2, в котором
нижняя соединительная часть (40) имеет внешнюю поверхность, имеющую форму, соответствующую форме внутренней поверхности блока носителя реагентов, подлежащего захвату таким образом, что при введении нижней соединительной части в блок носителя реагентов блок носителя реагентов захвачен за счет силы трения.
4. Блок носителя реагентов по п. 2 или 3, в котором
нижняя соединительная часть (40) содержит эластичный зажим (44), выполненный с возможностью захвата блока носителя реагентов путем зажима верхней части блока носителя реагентов.
5. Блок носителя реагентов по любому из пп. 2-4, в котором
верхняя соединительная часть (39) содержит выемку (36), имеющую форму внутренней поверхности, соответствующую форме внешней поверхности соединительной части (18) пипетирующей руки.
6. Блок носителя реагентов по любому из пп. 2-5, в котором
верхняя соединительная часть (39) содержит глухое отверстие (56), предпочтительно глухое отверстие конической формы.
7. Блок носителя реагентов по любому из пп. 2-6, в котором
верхняя соединительная часть (39) выполнена с возможностью разъемного соединения с пипетирующим наконечником (19, 55) предпочтительно путем размещения пипетирующего наконечника (19, 55) в глухом отверстии (56).
8. Блок носителя реагентов по любому из пп. 1-7, в котором
блок носителя реагентов представляет собой гелевый картридж.
9. Способ манипуляции блоком носителя реагентов по любому из пп. 1-8 с использованием пипетирующего робота, содержащего подвижную пипетирующую руку, содержащую соединительную часть (18) пипетирующей руки для разъемного соединения с пипетирующим наконечником (19, 55), причем соединительную часть (18) пипетирующей руки используют для захвата блока носителя реагентов в выемке так, что обеспечена возможность перемещения блока носителя реагентов посредством перемещения пипетирующей руки, причем блок носителя реагентов представляет собой картридж сосудов или микропланшет, имеющий множество реакционных сосудов, а выемка (36) представляет собой отдельное глухое отверстие блока носителя реагентов, отличающееся от реакционного сосуда.
10. Способ манипуляции блоком носителя реагентов по п. 9, согласно которому
блок носителя реагентов перемещают в целевую зону и высвобождают в целевой зоне, причем высвобождение в целевой зоне может быть осуществлено посредством одного из нижеследующих этапов, согласно которым:
- размещают блок носителя реагентов ниже стопора так, что при перемещении пипетирующей руки вверх блок носителя реагентов высвобождается из пипетирующей руки,
- уменьшают вакуум, удерживающий блок носителя реагентов, или
- выполняют снятие.
11. Способ манипуляции блоком носителя реагентов по п. 9 или 10, согласно которому
блок носителя реагентов захватывают и/или высвобождают посредством сил трения.
12. Способ манипуляции блоком носителя реагентов по любому из пп. 9-11, согласно которому
блок носителя реагентов захватывают путем его всасывания посредством пипетирующей руки и/или блок носителя реагентов высвобождают путем выталкивания воздуха из пипетирующей руки посредством пипетирующей руки.
| US 6660233 B1, 09.12.2003 | |||
| US 5443791 A, 22.08.1995 | |||
| WO 2001055727 A1, 02.08.2001 | |||
| US 2008016969 A1, 24.01.2008 | |||
| US 2014017148 A1, 16.01.2014 | |||
| US 2004047765 A1, 11.03.2004 | |||
| WO 1997026539 A1, 24.07.1997. |

