Область техники
Настоящее изобретение относится к устройству и способу автоматической регулировки натяжения гибкой направляющей шахтного подъемника и, в частности, применимо к направляющей системе подъемника, для которой не может быть использована жесткая направляющая в подземной шахте.
Уровень техники
В настоящее время в направляющих системах шахтных подъемников главным образом применяются жесткие направляющие. Поскольку во время проектирования, производства и установки жестких направляющих допускаются погрешности, а стенки ствола шахты испытывают большое давление и подвергаются деформации, часто возникают боковые отклонения, изгибная деформация, смещение стыков и местное выступание направляющей. В результате этого кабина подъемника испытывает сильные колебания во время подъема. В сложных случаях направляющие башмаки подъемника или колесо подъемника, опирающееся на направляющую с малым зазором, застревают, и соответственно кабина также застревает в стволе шахты. Это представляет огромную скрытую опасность для безопасной работы шахтного подъемника и несет угрозу для жизни и безопасности пассажиров, находящихся в кабине.
В стволах известных шахт используются гибкие направляющие стальных канатов, которые в основном представляют собой направляющую систему для стальных канатов, основанную на натяжении при помощи ударника в районе забоя, направляющую систему для стальных канатов гидравлическим винтом и гидравлическое натяжное устройство, основанное на высокоскоростном зажимном устройстве. Из всего вышеперечисленного преимущество направляющей системы из стальных канатов, натягиваемых при помощи ударника в районе забоя, заключается в постоянной силе натяжения, но чем тяжелее груз в кабине подъемника, тем больше должен быть вес ударника для натяжения и потребуется большее рабочее пространство. Поэтому необходимо, чтобы нижний резервуар шахты был выкопан как можно глубже. Если угольные брикеты или какие-либо другие вещи падают в резервуар шахты, уровень дна резервуара поднимается, т.е. сила натяжения ударника уменьшается, это приводит к значительному наклону кабины подъемника. Более того, трудно одновременно отрегулировать высокую трудоемкость, низкую производительность и точный вес ударника. Натяжение направляющей системы из стальных канатов при помощи гидравлического винта покрывает многие недостатки способа натяжения при помощи ударника, но процесс работы клинового устройства весьма трудоемкий и достаточно трудно поместить клин в нижнюю точку фиксирующего устройства. В результате между стальным канатом и клином случается проскальзывание, что приводит к падению стального каната направляющей. Гидравлическое натяжное устройство, основанное на высокоскоростном зажимном устройстве для канатов, исключает недостатки систем натяжения при помощи ударника и гидравлического винта, но в результате того, что сила натяжения стального каната уменьшается из-за постоянного непрерывного натяжения, стальной канат не способен осуществлять автоматическое натяжение. Для того чтобы натянуть канат, необходимо вручную ослабить прижимную планку каната. Если хода цилиндра недостаточно, то требуемое натяжение не может быть обеспечено, если только не натянуть стальной канат снова, что приведет к низкой эффективности подъемной системы.
Исходя из вышеприведенного анализа видно, что жесткие направляющие, используемые в шахтных подъемниках, не пригодны для осуществления нормального подъема и не существуют системы для шахтного подъемника, выполненные с использованием стального каната; ударник, используемый в направляющей системе из стальных канатов для осуществления натяжения в районе забоя, имеет большую массу, занимает много места, а вес не может быть легко отрегулирован; работа клиньев в направляющей системе из стальных канатов, основанной на натяжении при помощи гидравлического винта, весьма затруднителен и легко может возникнуть проскальзывание между стальным канатом и клином; гидравлическое натяжное устройство, основанное на высокоскоростном зажимном устройстве для канатов, не может регулироваться автоматически и поэтому неэффективно.
Раскрытие изобретения
Задача настоящего изобретения заключается в обеспечении необходимого устройства и способа автоматической регулировки натяжения гибкой направляющей шахтного подъемника, которое отличается простотой конструкции, легкостью и надежностью в работе, простотой установки и технического обслуживания, ограничением на отклонение по продольной и поперечной направляющей, а также возможностью контроля натяжения направляющей в режиме реального времени и автоматической регулировки в зависимости от величины контролируемого натяжения.
Устройство для автоматической регулировки натяжения гибкой направляющей шахтного подъемника в соответствии с настоящим изобретением содержит автоматическое натяжное устройство, установленное в устье скважины, и фиксирующее устройство, установленное в забое, подсоединенные к двум концам стального каната соответственно. Автоматическое натяжное устройство устья скважины присоединено к гидравлической системе и системе контроля натяжения. Автоматическое натяжное устройство устья скважины содержит нижнюю опорную поверхность фиксирующего приспособления, расположенную на верхнем несущем брусе. На нижней опорной поверхности фиксирующего приспособления расположены блоки натягивающих гидроцилиндров с правой и с левой стороны от стального каната, а также фиксирующая опорная поверхность шарнирных пальцев и несущая рама, расположенные спереди и сзади от стального каната. Поддерживающие опорные поверхности расположены спереди и сзади от блоков натягивающих гидроцилиндров. Плунжеры внутри блоков натягивающих гидроцилиндров присоединены при помощи шарнирных пальцев к посадочным местам шарнирных пальцев, прикрепленным к нижней части фиксирующей опорной поверхности шарнирных пальцев. Зажим, препятствующий падению стального каната, расположен под фиксирующей опорной поверхностью шарнирных пальцев. Зажим, фиксирующий натяжение каната, расположен над фиксирующей опорной поверхностью шарнирных пальцев. Верхняя опорная поверхность фиксирующего приспособления для крепления левой и правой направляющей стойки расположены на несущей раме. Направляющий зажим для регулировки каната расположен на верхней опорной поверхности фиксирующего приспособления. Направляющие пазы, обеспечивающие подвижность в вертикальном направлении вдоль направляющих стоек, расположены с двух сторон фиксирующей опорной поверхности шарнирных пальцев. Фиксирующее устройство забоя содержит фиксирующую пластину, расположенную на нижнем несущем брусе. На фиксирующей пластине расположен зажим, фиксирующий натяжение каната, прикрепленный к нижнему концу стального каната.
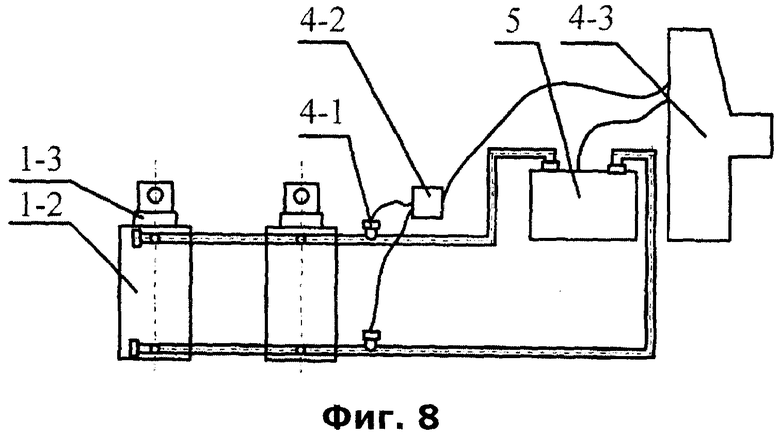
Система контроля натяжения содержит датчик давления масла, расположенный на трубопроводе гидравлической системы, приемник сигнала, присоединенный к датчику давления масла, а также промышленный персональный компьютер, присоединенный к приемнику сигнала, для осуществления контроля в режиме реального времени.
Способ автоматической регулировки натяжения гибкой направляющей шахтного подъемника в соответствии с настоящим изобретением подразумевает под собой осуществление контроля натяжения стального каната при помощи датчика давления масла в режиме реального времени и передачу полученных данных на промышленный персональный компьютер системы контроля натяжения через приемник сигнала. На промышленном персональном компьютере осуществляется анализ и обработка полученных данных.
Когда величина натяжения стального каната ниже, чем нижнее предельное значение, заданное промышленным персональным компьютером, промышленный персональный компьютер приводит в действие гидравлическую систему для нагнетения давления в трубопроводе в нижней части блоков натягивающих гидроцилиндров и приводит в работу плунжеры. Плунжеры начинают толкать вверх зажим, фиксирующий натяжение каната, закрепленный на фиксирующей опорной поверхности шарнирных пальцев, для натяжения стального каната.
В случае если первичный подъем плунжеров не обеспечивает натяжения стального каната, достигающего верхнего предельного значения, заданного промышленным персональным компьютером, цилиндры подают давление на другую сторону, плунжеры начинают оттягивать зажим, фиксирующий натяжение каната, прикрепленный к фиксирующей опорной поверхности шарнирных пальцев назад от верхней части, и клин зажима, фиксирующего натяжение каната, отсоединяется от стального каната, в то время как, вследствие способности клиньев к самоблокировке, стальной канат оказывается зажат клином зажима, препятствующего падению каната, и направляющего зажима для регулировки каната, и натяжение стального каната сохраняется. Далее продолжают нагнетать давление в трубопроводе в нижней части блоков натягивающих гидроцилиндров для того чтобы толкать плунжеры вверх. Этот процесс повторяется один или несколько раз, пока натяжение стального каната не достигнет верхнего предельного значения, заданного промышленным персональным компьютером.
Настоящее изобретение может осуществлять регулировку направления движения кабины в продольном направлении и ограничение отклонений кабины подъемника в поперечном направлении при подъеме. Направляющая может позволить избежать бокового смещения и обеспечить стабильный подъем кабины шахтного подъемника на гибких направляющих. Кроме того, оно дает возможность осуществлять контроль натяжения направляющей в режиме реального времени, выполнять автоматическую регулировку в соответствии с величиной натяжения и выполнять функции автоматического контроля и автоматической регулировки. Также это изобретение применимо к направляющим устройствам с канатным клетевым подъемником в случае шахтных клетей и вагонеток. Изобретение имеет следующие преимущества:
(1) Гибкая направляющая может поддерживать необходимое натяжение, осуществлять регулировку направления движения в продольном направлении и ограничение отклонений в поперечном направлении, а также осуществлять надежный подъем кабины подъемника.
(2) По сравнению с жесткой направляющей, преимущество гибкой направляющей заключается в простоте установки и технического обслуживания, а также низкой стоимости. Гибкая направляющая, в основном, применяется в шахтах со значительной поперечной деформацией, в которой не может применяться жесткая направляющая, а также решает проблему высокого шума, сильной поперечной вибрации и даже застревания кабины при ее подъеме по жесткой направляющей обычного шахтного подъемника.
(3) Система автоматической регулировки натяжения может осуществлять контроль натяжения стального каната в режиме реального времени, осуществлять автоматическую регулировку натяжения, осуществлять автоматический контроль и автоматическую коррекцию натяжения, тем самым повышая безопасность, надежность и удобство перемещения в кабине.
Краткое описание чертежей
Фиг.1 - структурный вид устройства настоящего изобретения для автоматической регулировки натяжения гибкой направляющей шахтного подъемника;
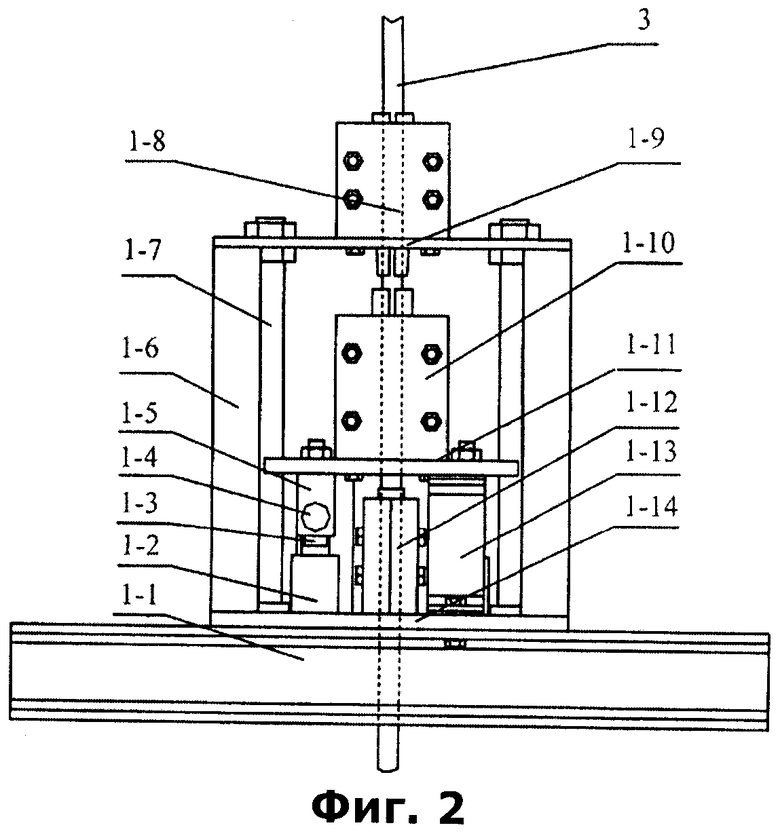
Фиг.2 - вид спереди конструкции автоматического натяжного устройства настоящего изобретения, размещенного в устье скважины.
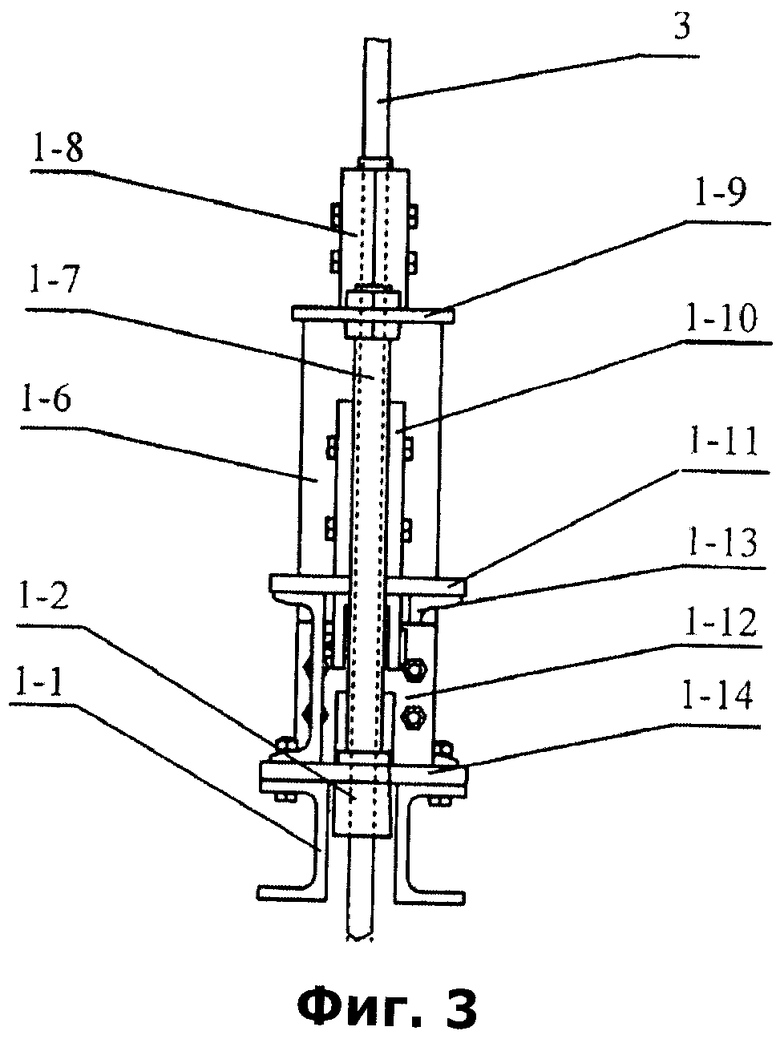
Фиг.3 - вид сбоку конструкции автоматического натяжного устройства настоящего изобретения, размещенного в устье скважины.
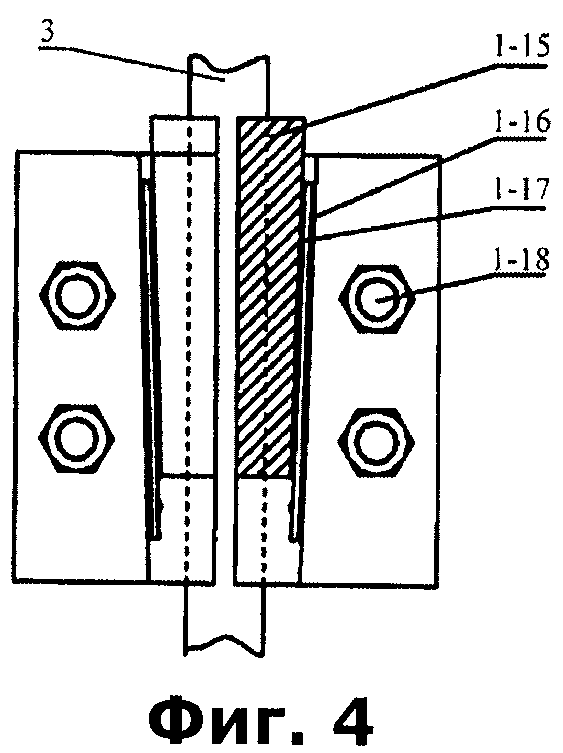
Фиг.4 - вид спереди конструкции канатного зажима настоящего изобретения.
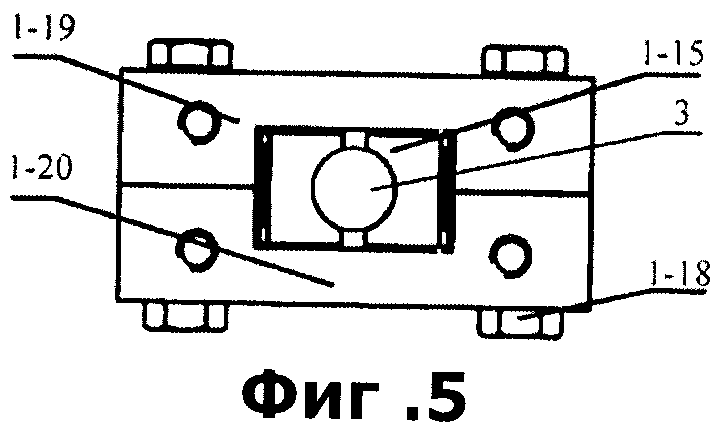
Фиг.5 - вид сверху конструкции канатного зажима настоящего изобретения.
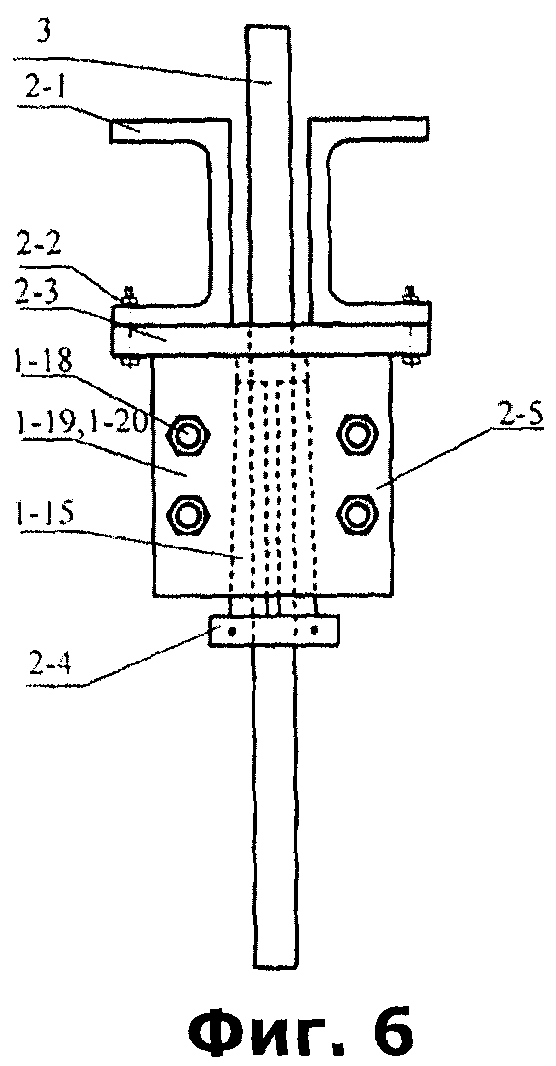
Фиг.6 - вид спереди конструкции фиксирующего устройства забоя настоящего изобретения.
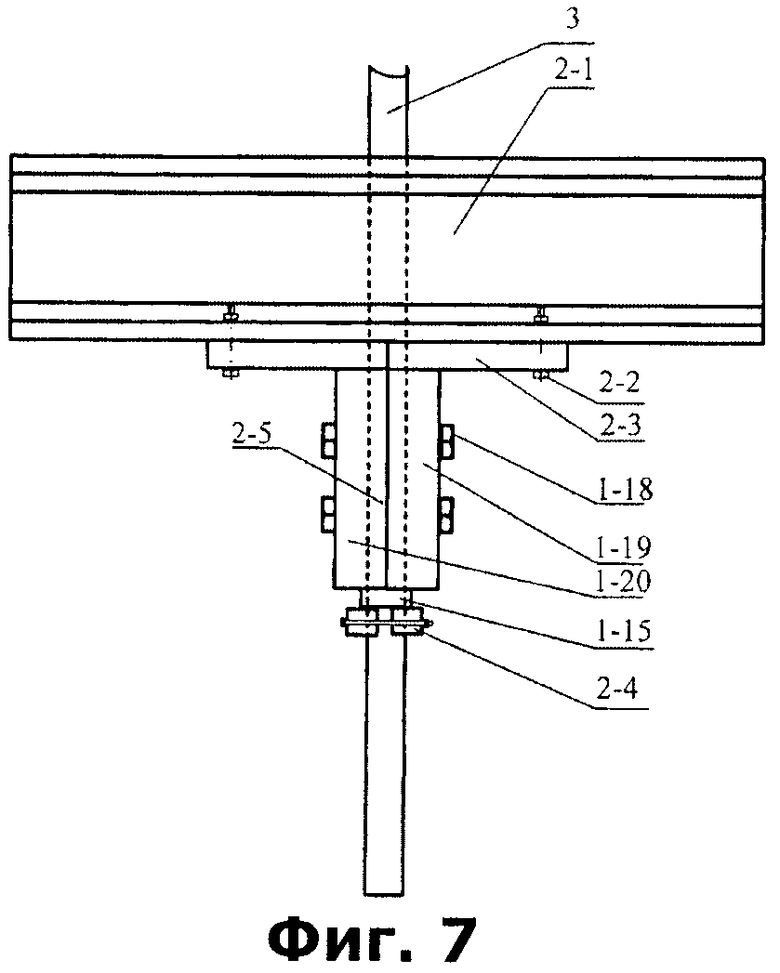
Фиг.7 - вид сбоку конструкции фиксирующего устройства забоя настоящего изобретения.
Фиг.8 - структурный чертеж системы контроля натяжения настоящего изобретения.
На чертежах:
автоматическое натяжное устройство 1, размещенное в устье скважины,
фиксирующее устройство 2 забоя,
стальной канат 3,
система 4 контроля натяжения,
гидравлическая система 5;
верхний несущий брус 1-1,
блок 1-2 натягивающих гидроцилиндров,
плунжер 1-3,
шарнирный палец 1-4,
посадочное место 1-5 шарнирных пальцев,
несущая рама 1-6,
направляющая стойка 1-7,
направляющий зажим 1-8 для регулировки каната,
верхняя опорная поверхность 1-9 фиксирующего приспособления,
зажим 1-10, фиксирующий натяжение каната,
фиксирующая опорная поверхность 1-11 шарнирных пальцев,
зажим 1-12, препятствующий падению каната,
поддерживающая опорная поверхность 1-13,
нижняя опорная поверхность 1-14 фиксирующего приспособления,
клин 1-15,
ролик 1-16,
рейка 1-17,
соединительный болт 1-18,
передняя прижимная пластина 1-19,
задняя прижимная пластина 1-20;
нижний несущий брус 2-1,
фиксирующий болт 2-2,
фиксирующая пластина 2-3,
канатный зажим 2-4,
фиксирующий канатный зажим 2-5;
датчик 4-1 давления масла,
приемник 4-2 сигнала,
промышленный персональный компьютер - 4-3.
Осуществление изобретения
Осуществление настоящего изобретения описано ниже со ссылками на приложенные чертежи.
Как показано на Фиг.1, устройство для автоматической регулировки натяжения гибкой направляющей шахтного подъемника главным образом содержит автоматическое натяжное устройство 1, размещенное в устье скважины, расположенное на верхнем несущем брусе 1-1, фиксирующее устройство 2 забоя, стальной канат 3, систему 4 контроля натяжения и гидравлическую систему 5. Автоматическое натяжное устройство 1 и фиксирующее устройство 2 соединены между собой стальным канатом 3. Гидравлическая система 5 и система 4 контроля натяжения присоединены к автоматическому натяжному устройству 1.
В автоматическом натяжном устройстве 1, представленном на фиг.2 и фиг.3, нижняя опорная поверхность 1-14 фиксирующего приспособления расположена на верхнем несущем брусе 1-1. Нижняя опорная поверхность 1-14 фиксирующего приспособления оснащена зажимом 1-12, препятствующим падению каната, для закрепления стального каната 3, зажимом 1-10, фиксирующим натяжение каната и направляющим зажимом 1-8 для регулировки каната. Блоки 1-2 натягивающих гидроцилиндров расположены с левой и с правой стороны от зажима 1-12, препятствующего падению каната. Поддерживающие опорные поверхности 1-13, расположены спереди и сзади от блоков 1-2 натягивающих гидроцилиндров. Фиксирующая опорная поверхность 1-11 шарнирных пальцев расположена на зажиме 1-12, препятствующем падению каната. Зажим 1-10, фиксирующий натяжение каната, расположен на фиксирующей опорной поверхности 1-11 шарнирных пальцев. Плунжеры 1-3 внутри блоков 1-2 натягивающих гидроцилиндров подсоединены при помощи шарнирных пальцев 1-4 к посадочному месту 1-5 шарнирных пальцев, прикрепленным к нижней части фиксирующей опорной поверхности 1-11 шарнирных пальцев. Несущая рама 1-6 расположена с наружной стороны фиксирующей опорной поверхности 1-11 шарнирных пальцев. Опорная поверхность 1-9 верхних фиксаторов для фиксации левой и правой направляющей стойки 1-7 расположена на несущей раме 1-6. Направляющий зажим 1-8 для регулировки каната расположен на верхней опорной поверхности 1-9 фиксирующего приспособления. Направляющие пазы, обеспечивающие подвижность в вертикальном направлении вдоль направляющих стоек 1-7, расположены на торцах обеих сторон фиксирующей опорной поверхности 1-11 шарнирных пальцев. Нагрузка, принимаемая направляющим зажимом 1-8 для регулировки каната верхней опорной поверхности 1-9 фиксирующего приспособления, переносится несущей рамой 1-6 на две стороны. Несущая рама 1-6 представляет собой швеллерную балку, которая подсоединена и прикреплена к верхней опорной поверхности 1-9 фиксирующего приспособления и нижней опорной поверхности 1-14 фиксирующего приспособления.
Как показано на Фиг.4 и Фиг.5, все зажимы, прикрепленные к стальному канату 3, имеют одинаковую конструкцию и отличаются только по размеру. Конструкция каждого канатного зажима содержит переднюю прижимную пластину 1-19 и заднюю прижимную пластину 1-20 с клиновидным пазом в середине. Передняя и задняя прижимные пластины подсоединены и закреплены при помощи соединительного болта 1-18. Внутри каждого клиновидного паза расположено два симметричных клина 1-15, перемещающихся в вертикальном направлении. На смежных плоскостях двух клиньев 1-15 находятся раскрытые пазы арочного типа под канат. Между смежными плоскостями каждого клина и паза расположена рейка 1-17 с роликом 1-16.
В фиксирующем устройстве 2 забоя, как показано на Фиг.6 и Фиг.7, фиксирующий канатный зажим 2-5, расположенный в противоположном положении в нижней части на стальном канате 3, установлен в нижней части нижнего несущего бруса 2-1 при помощи фиксирующей пластины 2-3 и прикреплен при помощи фиксирующего болта 2-2. Фиксирующий канатный зажим 2-5 установлен противоположно и в перевернутом положении относительно направляющего зажима 1-8 для регулировки каната, зажима 1-10, фиксирующего натяжение каната и зажима 1-12, препятствующего падению каната. Также стальной канат 3 проходит через центральный паз клина 1-15 фиксирующего канатного зажима 2-5 и зажимается при помощи канатного зажима 2-4.
Система контроля натяжения, представленная на Фиг.8, содержит датчик 4-1 давления масла, расположенный на трубопроводе гидравлической системы 5, приемник 4-2 сигнала, присоединенный к датчику 4-1 давления масла и промышленный персональный компьютер 4-3 для осуществления контроля в режиме реального времени, соединенный с приемником 4-2 сигнала.
Способ автоматической регулировки натяжения гибкой направляющей шахтного подъемника в соответствии с настоящим изобретением:
(1) Во-первых, каждый клин 1-15 направляющего зажима 1-8 для регулировки каната, зажима 1-10, фиксирующего натяжение каната и зажима 1-12, препятствующего падению каната, поднимается, и стальной канат 3 пропускается через центральный паз, предусмотренный в каждом клине 1-15 направляющего зажима 1-8 для регулировки каната, зажима 1-10, фиксирующего натяжение каната, и зажима 1-12, препятствующего падению каната, до тех пор пока канат не достигнет забоя; клин 1-15 направляющего зажима 1-8 для регулировки каната опускается для того, чтобы застопорить стальной канат 3, стальной канат 3 в забое также пропускается через центральный паз перевернутого клина 1-15 фиксирующего канатного зажима 2-5, зажимается клином 1-15 фиксирующего канатного зажима 2-5 и фиксируется канатным зажимом 2-4, а затем присоединяется к нижнему несущему брусу 2-3 в забое; после этого клинья 1-15 зажима 1-10, фиксирующего натяжение каната и зажима 1-12, препятствующего падению каната, опускаются и плунжеры 1-3 внутри блоков 1-2 натягивающих гидроцилиндров толкаются вперед с тем, чтобы заставить зажим 1-10, фиксирующий натяжение каната, двигаться вверх, вследствие способности клиньев 1-15 к самоблокировке стальной канат 3 зажимается направляющим зажимом 1-8 для регулировки каната и тянется наверх, фиксирующий канатный зажим 2-5 забоя также зажимается вследствие способности клиньев 1-15 к самоблокировке.
(2) Контроль за давлением внутри блоков 1-2 натягивающих гидроцилиндров осуществляется через датчик 4-1 давления масла в режиме реального времени, а данные, принимаемые приемником сигнала, передаются на промышленный персональный компьютер 4-3 для их анализа и обработки.
Когда величина натяжения стального каната 3 меньше, чем нижнее предельное значение, заданное промышленным персональным компьютером 4-3, промышленный персональный компьютер 4-3 приводит в действие гидравлическую систему 5 для нагнетения давления в трубопроводе в нижней части блоков 1-2 натягивающих гидроцилиндров и толкает плунжеры 1-3. Плунжеры 1-3 начинают толкать вверх зажим 1-10, фиксирующий натяжение каната, закрепленный на фиксирующей опорной поверхности 1-11 шарнирных пальцев, для натяжения стального каната 3.
В случае если первичный подъем плунжеров 1-3 не обеспечивает натяжения стального каната 3 достигающего верхнего предельного значения, заданного промышленным персональным компьютером 4-3, плунжеры 1-3 начнут оттягивать зажим 1-10, фиксирующий натяжение каната, закрепленный на фиксирующей опорной поверхности 1-11 шарнирных пальцев назад от верхней части, и клин 1-15 зажима 1-10, фиксирующего натяжение каната, будет отсоединен от стального каната 3, при этом вследствие способности клиньев 1-15 к самоблокировке стальной канат 3 оказывается зажат клином 1-15 зажима 1-12, препятствующего падению каната, и направляющего зажима 1-8 для регулировки каната и натяжение стального каната 3 сохраняется.
Далее, продолжают нагнетать давление в трубопроводе в нижней части блоков 1-2 натягивающих гидроцилиндров для толкания плунжеров 1-3 вверх. Плунжеры 1-3 заставляют зажим 1-10, фиксирующий натяжение каната, двигаться вверх. Стальной канат 3 внутри зажима 1-10, фиксирующего натяжение каната зажимается снова и тянется вверх, снова натягивая стальной канат 3. Этот процесс повторяется один или несколько раз до тех пор пока натяжение стального каната 3 не достигнет верхнего предельного значения, заданного промышленным персональным компьютером 4-3.
(3) Наконец, если гидравлическая система 5 выходит из строя, зажим 1-10, фиксирующий натяжение каната, быстро отводится назад, а затем поддерживающая опорная поверхность 1-13 блокирует зажим 1-10, фиксирующий натяжение каната, таким образом защищая блоки 1-2 натягивающих гидроцилиндров и плунжеры 1-3. Одновременно, стальной канат 3 зажимается зажимом 1-12, фиксирующим натяжение каната, направляющим зажимом 1-8 для регулировки каната и зажимом 1-12, защищающим от падения каната, для поддержания натяжения, датчик 4-1 давления масла гидравлической системы 5 производит контроль, а сигналы передаются через приемник 4-2 сигнала на промышленный персональный компьютер 4-3 для обработки причины неисправности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАХТНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2585132C2 |
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМНЫХ КАНАТОВ ШАХТНОГО ПОДЪЕМНИКА И СПОСОБ ИЗМЕРЕНИЯ, ОСУЩЕСТВЛЯЕМЫЙ ПОСРЕДСТВОМ УКАЗАННОГО УСТРОЙСТВА | 2011 |
|
RU2523302C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ НАПРАВЛЕНИЯ, УДЕРЖАНИЯ И НАТЯЖЕНИЯ СТАЛЬНОГО ПРОВОЛОЧНОГО ТРОСА В КРАНАХ | 2006 |
|
RU2408526C2 |
| УСТРОЙСТВО ДЛЯ ЗАТЯГИВАНИЯ УЗЛА ВЕРЕВКИ ПОЖАРНОЙ СПАСАТЕЛЬНОЙ В КОУШЕ | 2021 |
|
RU2789869C1 |
| Транспортное средство | 1981 |
|
SU962657A1 |
| Мобильный буксировочный бугельный подъемник | 2016 |
|
RU2619352C1 |
| КАНАТНО-НАТЯЖНОЙ МЕХАНИЗМ ДЛЯ ПРИВОДА РЕВЕРСИВНОГО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2003 |
|
RU2252184C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ КАБЕЛЯ | 2018 |
|
RU2683001C1 |
| КОНЦЕВОЕ ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ РАБОТАЮЩЕГО НА РАСТЯЖЕНИЕ ЭЛЕМЕНТА, ПОДЪЕМНАЯ СИСТЕМА И СПОСОБ ЗАДЕЛКИ РАБОТАЮЩЕГО НА РАСТЯЖЕНИЕ ЭЛЕМЕНТА | 1999 |
|
RU2248929C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО КОНТРОЛЯ И УЧЕТА СОСТОЯНИЯ ОБОРУДОВАНИЯ И МЕТОД МОНИТОРИНГА ЗА КРИТИЧЕСКИМИ КОМПОНЕНТАМИ В ПОДЪЕМНОЙ СИСТЕМЕ | 2017 |
|
RU2711767C1 |
Изобретения относятся к устройству и способу автоматической регулировки натяжения гибкой направляющей шахтного подъемника. Устройство содержит автоматическое натяжное устройство (1), расположенное в устье шахты и фиксирующее устройство (2), расположенное на дне шахты, присоединенные к двум концам стального каната соответственно. Автоматическое натяжное устройство присоединено к гидравлической системе и к системе контроля натяжения. Автоматическое натяжное устройство (1) содержит нижнюю опорную поверхность стопорного приспособления, расположенную на верхнем несущем брусе, блок натягивающих гидроцилиндров и плунжеры, фиксирующую опорную поверхность, несущую раму, поддерживающие опорные поверхности, посадочные места шарнирных пальцев, зажим каната, зажим фиксации каната, две направляющие стойки с направляющими канавками, верхнюю опорную поверхность, направляющий зажим для ориентации и регулировки кабеля. Фиксирующее устройство(2), расположенное на дне шахты, содержит фиксирующую пластину и фиксирующий канатный зажим для фиксации каната. Способ осуществляется с использованием охарактеризованного выше устройства. Изобретения обеспечивают простую конструкцию гибкой направляющей, а также удобство в использовании, надежность в работе и легкость в монтаже и техническом обслуживании. 2 н. и 1 з.п. ф-лы, 8 ил.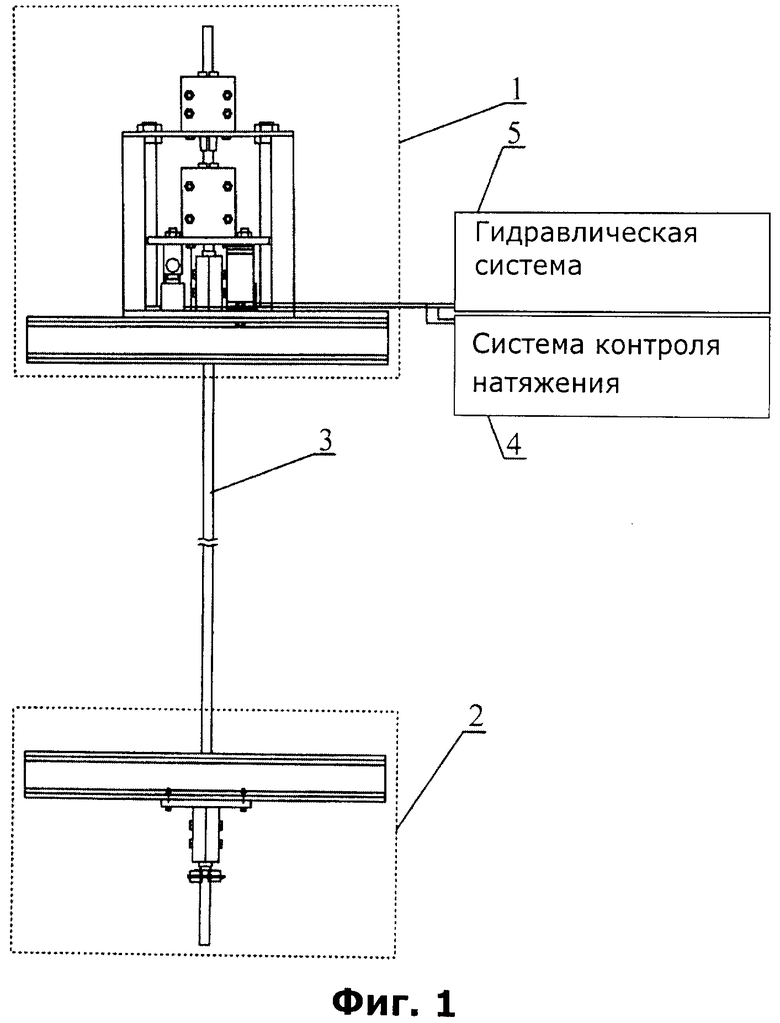
1. Устройство для автоматической регулировки натяжения гибкой направляющей шахтного подъемника, содержащее автоматическое натяжное устройство (1), размещенное в устье скважины, и фиксирующее устройство (2), размещенное в забое, присоединенные к двум концам стального каната (3) соответственно, причем
автоматическое натяжное устройство (1), размещенное в устье скважины, присоединено к гидравлической системе (5) и системе (4) контроля натяжения;
автоматическое натяжное устройство (1), размещенное в устье скважины, содержит
нижнюю опорную поверхность (1-14) стопорного приспособления, установленную на верхнем несущем брусе (1-1),
блоки (1-2) натягивающих гидроцилиндров с правой и с левой стороны от стального каната (3), расположенные на нижней опорной поверхности (1-14) стопорного приспособления, а также
стопорную опорную поверхность (1-11) шарнирных пальцев и
несущую раму (1-6), расположенные спереди и сзади стального каната (3);
поддерживающие опорные поверхности (1-13) расположены спереди и сзади блоков (1-2) натягивающих гидроцилиндров,
плунжеры (1-3) внутри блоков (1-2) натягивающих гидроцилиндров присоединены при помощи шарнирных пальцев (1-4) к посадочным местам (1-5) шарнирных пальцев, прикрепленным к стопорной опорной поверхности (1-11) шарнирных пальцев,
зажим (1-12), препятствующий падению каната, для предотвращения падения стального каната (3) расположен под стопорной опорной поверхностью (1-11) шарнирных пальцев,
зажим (1-10), фиксирующий натяжение стального каната (3), расположен на стопорной опорной поверхности (1-11) шарнирных пальцев,
верхняя опорная поверхность (1-9) стопорного приспособления для крепления левой и правой направляющей стойки (1-7) расположена на несущей раме (1-6),
направляющий зажим (1-8) для регулировки каната расположен на верхней опорной поверхности (1-9) стопорного приспособления,
направляющие пазы, обеспечивающие подвижность в вертикальном направлении вдоль направляющих стоек (1-7), расположены с двух сторон стопорной опорной поверхности (1-11) шарнирных пальцев;
при этом
фиксирующее устройство (2), размещенное в забое, содержит фиксирующую пластину (2-3) на нижнем несущем брусе (2-1), на которой расположен фиксирующий канатный зажим (2-5), закрепленный на нижнем конце стального каната (3).
2. Устройство для автоматической регулировки натяжения гибкой направляющей шахтного подъемника по п.1, в котором система (4) контроля натяжения содержит
датчик (4-1) давления масла, расположенный на трубопроводе гидравлической системы (5),
приемник (4-2) сигнала, присоединенный к датчику (4-1) давления масла, и
промышленный персональный компьютер (4-3) для осуществления контроля в режиме реального времени, присоединенный к приемнику (4-2) сигнала.
3. Способ автоматической регулировки натяжения гибкой направляющей шахтного подъемника, согласно которому
осуществляют контроль натяжения стального каната (3) при помощи датчика (4-1) давления масла в режиме реального времени,
передают собранные данные на промышленный персональный компьютер (4-3) системы (4) контроля натяжения через приемник (4-2) сигнала для анализа и обработки;
в случае если величина натяжения стального каната (3) меньше, чем нижнее предельное значение, заданное промышленным персональным компьютером (4-3), промышленный персональный компьютер (4-3) приводит в действие гидравлическую систему (5) для нагнетания давления в трубопроводе в нижней части блоков (1-2) натягивающих гидроцилиндров и толкает плунжеры (1-3),
плунжеры (1-3) толкают вверх зажим (1-10), фиксирующий натяжение каната, закрепленный на стопорной опорной поверхности (1-11) шарнирных пальцев, для натяжения стального каната (3);
в случае если первичный подъем плунжеров (1-3) не обеспечивает натяжения стального каната (3), достигающего верхнего предельного значения, заданного промышленным персональным компьютером (4-3), цилиндры подают давление к другой стороне, плунжеры (1-3) оттягивают зажим (1-10), фиксирующий натяжение каната, закрепленный на стопорной опорной поверхности (1-11) шарнирных пальцев, назад от верхней части, и клин (1-15) зажима (1-10), фиксирующего натяжение каната, прекращает взаимодействие со стальным канатом (3),
при этом вследствие способности клиньев (1-15) к самоблокировке стальной канат (3) оказывается зажат клином (1-15) направляющего зажима (1-8) для регулировки каната и зажима (1-12), препятствующего падению каната, и натяжение стального каната (3) сохраняется;
далее продолжают нагнетать давление в трубопроводе в нижней части блоков (1-2) натягивающих гидроцилиндров для толкания плунжеров (1-3) вверх и повторяют этот процесс один или несколько раз до тех пор, пока натяжение стального каната (3) не достигнет верхнего предельного значения, заданного промышленным персональным компьютером (4-3).
| Устройство для натяжения каната | 1976 |
|
SU594002A1 |
| Устройство для натяжения канатов | 1974 |
|
SU561704A1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ КАНАТОВ | 0 |
|
SU287266A1 |
| ГИДРАВЛИЧЕСКОЕ НАТЯЖНОЕ УСТРОЙСТВО | 2007 |
|
RU2349757C2 |
| CN 1570352 A, 26.01.2005; | |||
| Конденсатоотводчик | 1982 |
|
SU1016616A1 |

