Настоящее изобретение относится к способу перегрузки труб с транспортного судна на судно-трубоукладчик.
Более конкретно, настоящее изобретение относится к способу, в котором транспортное судно содержит однокорпусную или многокорпусную плавучую конструкцию и трюм в плавучей конструкции для размещения некоторого количества труб для подачи на судно-трубоукладчик.
Судно-трубоукладчик в нормальных условиях содержит сборочную линию для соединения труб в подводный трубопровод и рампу для укладки трубопровода, когда трубы соединены. Подводные трубопроводы в нормальных условиях укладываются на дно воодоемов, используются для транспортировки углеводородов и проходят сотни километров. Трубопроводные трубы обычно имеют стандартную длину 12 метров, таким образом, судно-трубоукладчик может нести незначительный процент труб, требуемых для строительства трубопровода, и должно периодически снабжаться трубами с транспортного судна. Трюм транспортного судна открыт сверху и имеет конструктивное исполнение для размещения труб, которые передаются с транспортного судна на судно-трубоукладчик при установке транспортного судна у борта судна-трубоукладчика, и подъеме и передаче труб с помощью крана, установленного на судне-трубоукладчике и оборудованного устройством захвата труб. Кран обычно имеет стрелу, достающую до любой точки трюма транспортного судна. Поскольку кран использует подъемные тросы и имеет место раскачивание, и перемещения захватывающего устройства делают сложным его точную установку, захватывающее устройство должно устанавливаться и прикрепляться к трубам рабочими внутри трюма.
Описанный выше способ перегрузки имеет различные недостатки, особенно при работе в бурном море. Во-первых, чем больше волнение, тем опаснее условия работы внутри трюма, так что стандартной практикой является отмена операций перегрузки в случае превышения заданной высоты волн.
Во-вторых, перегрузка происходит относительно медленно и подвержена остановкам в условиях бурного моря.
Пример судна-трубоукладчика, оборудованного башней вертикального спуска труб на морское дно раскрыт в ЕР 1265017, а пример перегрузки труб между двумя судами раскрыт в DE 3315888. Вместе с тем, в обоих документах не предложено никаких мер для уменьшения опасностей, связанных с перегрузкой труб.
Задачей настоящего изобретения является создание способа, делающего перегрузку труб более безопасной.
Другой задачей настоящего изобретения является создание способа, обеспечивающего перегрузку труб даже в условиях очень сильного волнения, при этом гарантирующего безопасность персонала.
Согласно настоящему изобретению создан способ перегрузки труб с транспортного судна на судно-трубоукладчик, содержащий этапы захвата труб в трюме транспортного судна и высвобождения труб в нужном положении внутри поста перегрузки на транспортном судне с использованием манипулятора, установленного на транспортном судне, и направления захватывающего устройства, соединяющегося с краном, в нужное положение на посту перегрузки.
Настоящее изобретение также относится к комплекту, устанавливаемому на существующие суда для упрощения перегрузки труб.
Согласно настоящему изобретению создан комплект для перегрузки труб, содержащий захватывающее устройство для захвата труб и соединяющееся с краном и постом перегрузки на верхней палубе транспортного судна для размещения труб временно в нужном положении и для направления захватывающего устройства в нужное положение, и манипулятор, установленный на транспортном судне и выполненный с возможностью захвата труб в трюме транспортного судна и высвобождения труб в заданном положении на посту перегрузки.
Не ограничивающий вариант осуществления настоящего изобретения описан ниже в качестве примера со ссылкой на прилагаемые чертежи, на которых показано следующее.
На фиг.1 показан вид в плане с частями, удаленными для ясности, транспортного судна у борта судна-трубоукладчика при перегрузке труб.
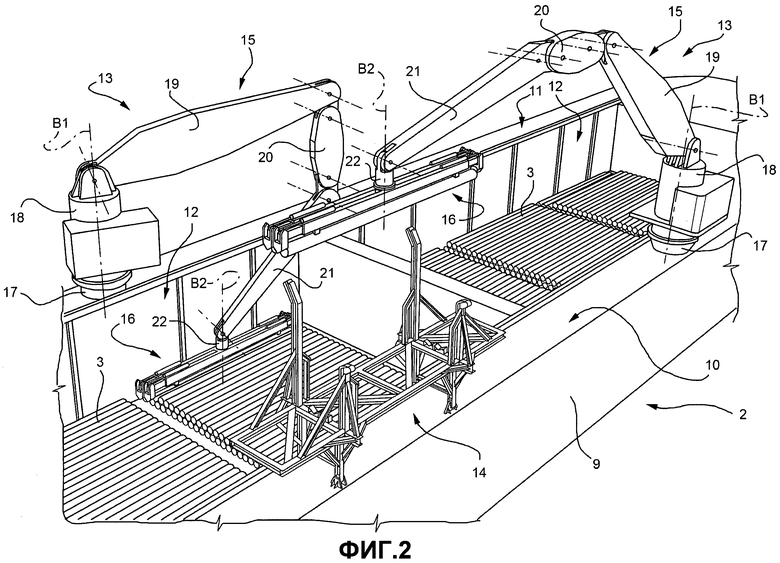
На фиг.2 показан с увеличением вид в перспективе с частями, удаленными для ясности, транспортного судна фиг.1.
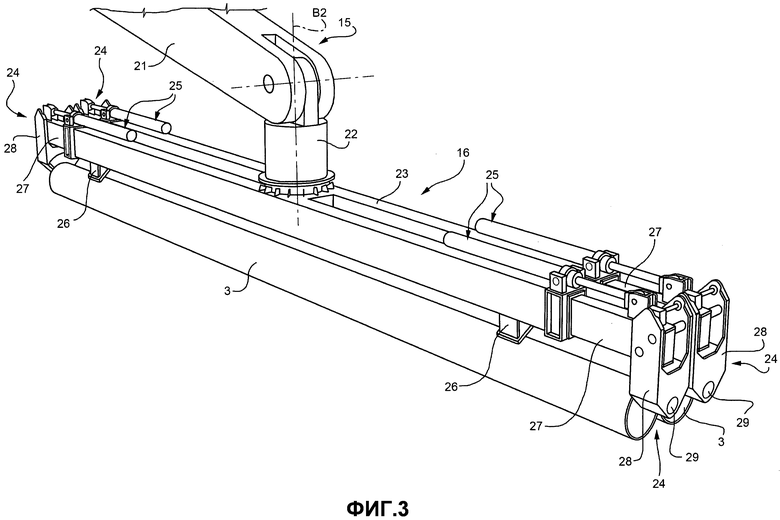
На фиг.3 показан с увеличением вид в перспективе с частями, удаленными для ясности, захватывающего устройства транспортного судна фиг.2.
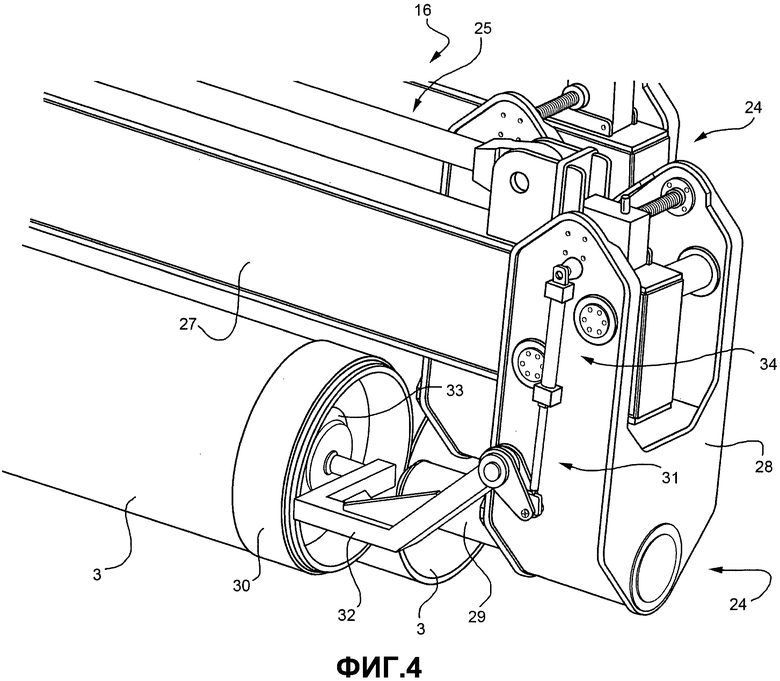
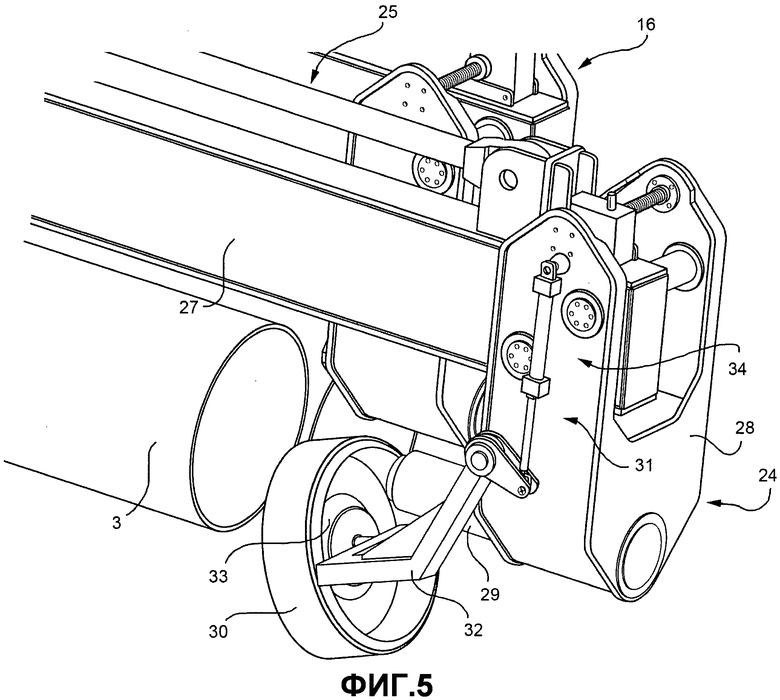
На фиг.4-7 показан с увеличением вид в перспективе с частями, удаленными для ясности, захватывающего устройства транспортного судна на последовательных этапах захвата трубы.
На фиг.8 показан с увеличением вид в перспективе с частями, удаленными для ясности, детали транспортного судна фиг.2.
На фиг 9 показан вид в перспективе с частями, удаленными для ясности, захватывающего устройства крана на судне-трубоукладчике.
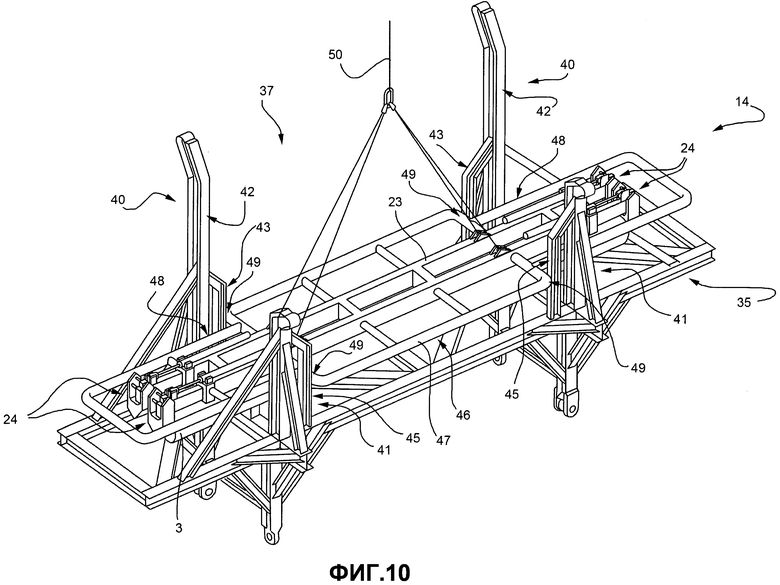
На фиг.10 показан вид в перспективе с частями, удаленными для ясности, захватывающего устройства фиг.9 на этапе захвата одной трубы на пункте перегрузки.
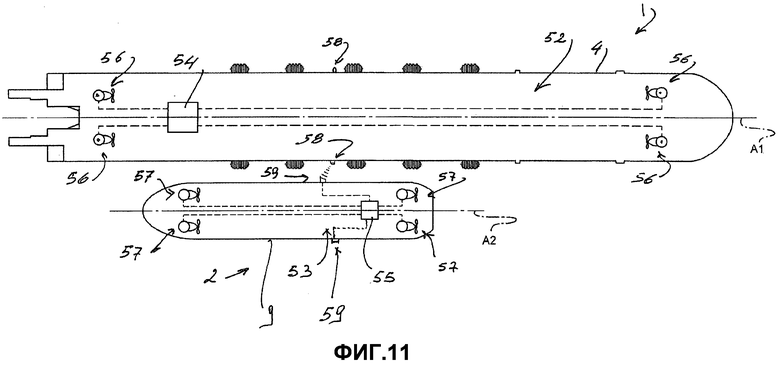
На фиг.11 показан схематично вид в плане с частями, удаленными для ясности, транспортного судна у борта судна-трубоукладчика.
На фиг.1 позицией 1 указано судно-трубоукладчик для укладки подводного трубопровода (не показано) и позицией 2 транспортное судно для подачи труб 3 на судно-трубоукладчик 1. В показанном примере судно-трубоукладчик 1 проходит вдоль оси A1, конструктивно исполнено для укладки в трубопровода S-образной конфигурации и содержит плавучую конструкцию 4, сборочную линию 5 для сборки труб 3 в трубопровод (не показано), верхнюю палубу 6, два крана 7 на противоположных сторонах верхней палубы 6 и зону 8 верхней палубы 6, в которой складируются трубы 3.
Транспортное судно 2 проходит вдоль оси A2, установлено у борта судна-трубоукладчика 1 для перегрузки труб 3 и содержит плавучую конструкцию 9, верхнюю палубу 10, открытый трюм 11 в показанном примере с двумя отсеками 12, два манипулятора 13 и два поста 14 перегрузки. Число манипуляторов 13 и постов 14 перегрузки зависит от геометрии и размера транспортного судна 2. Для некоторых транспортных судов 2 достаточно одного манипулятора 13 и одного поста 14 перегрузки.
В показанном примере, отсеки 12 трюма 11 располагаются последовательно вдоль оси A2 транспортного судна 2. Каждый манипулятор 13 и каждый пост 14 перегрузки относятся к соответствующему отсеку и установлены на противоположных сторонах транспортного судна 2.
В показанном примере трубы располагаются в трех штабелях параллельных труб 3, разнесенных на равные расстояния.
Как показано на фиг.2, каждый манипулятор 13 содержит кран 15 с гидравлически управляемой стрелой и захватывающее устройство 16.
Кран 15 с гидравлически управляемой стрелой содержит опору 17, закрепленную на верхней палубе 10 у борта отсека 12, башню 18, вращающуюся на опоре 17 вокруг оси B1, перпендикулярной верхней палубе 10, и четыре последовательно соединенных рычага 19, 20, 21, 22, среди которых рычаг 19 шарнирно соединяется с башней 18, и рычаги 19, 20, 21 и 22 соединяются друг с другом с установкой на соответствующих осях, проходящих поперечно оси B1. Захватывающее устройство 16 устанавливается на конце рычага 22 с возможностью вращения вокруг оси B2.
Кран 15 с гидравлически управляемой стрелой может устанавливать захватывающее устройство 16 в любом месте в соответствующем отсеке 12 с возможностью подбирать трубы 3 на месте их нахождения.
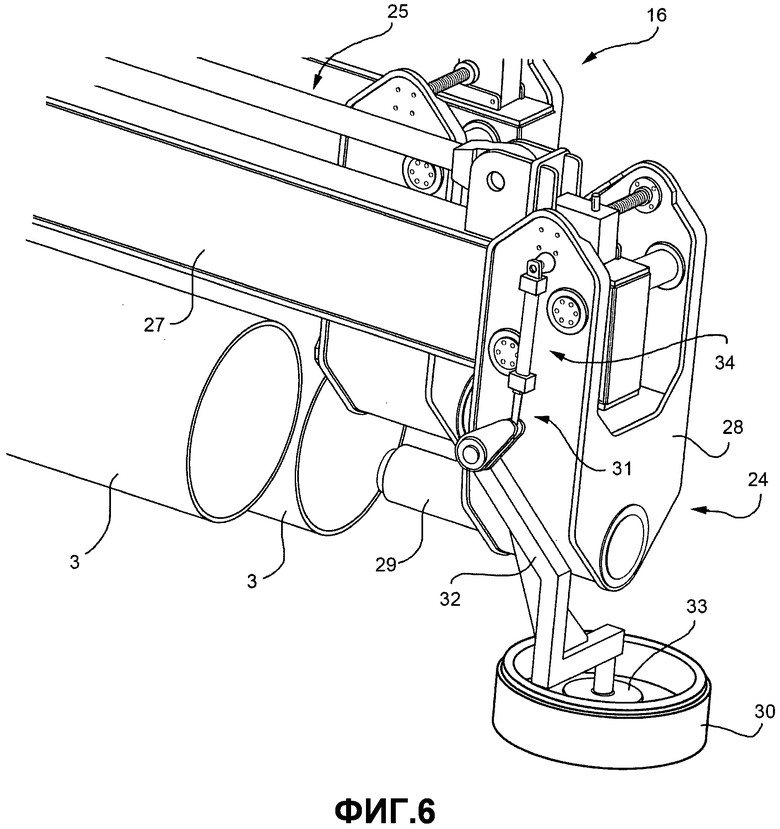
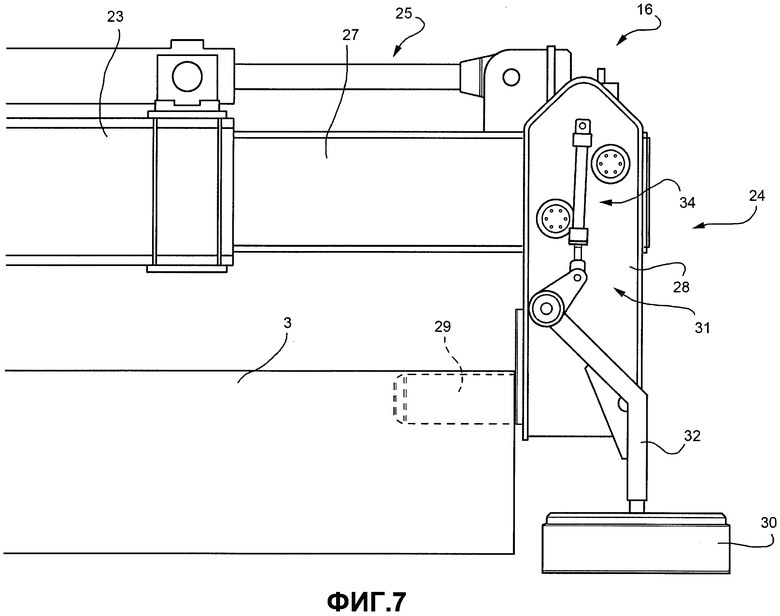
Показанное на фиг.3 захватывающее устройство 16 выполнено с возможностью подбирать две расположенные бок о бок параллельные трубы 3 одновременно и содержит удлиненную конструкцию 23, шарнирно прикрепленную к рычагу 22 на оси B2, два захватывающих элемента 24 для каждой трубы 3, установленные на противоположных концах удлиненной конструкции 23 и перемещающиеся относительно удлиненной конструкции 23, исполнительный механизм 25 для каждого захватывающего элемента 24 и опорные элементы 26, установленные на удлиненной конструкции 23, которая опирается на трубы 3 для совмещения захватывающего элемента 16 с трубами 3. Каждый захватывающий элемент 24 содержит стержень 27, установленный для телескопического перемещения в удлиненной конструкции 23, головку 28, установленную на свободном конце стержня 27, и ниппель 29, установленный на головке 28 и выполненный для вставления внутрь трубы 3, как показано на фиг.7.
В дополнение к захватывающему устройству 16 для трубы 3 на фиг.4-7 также показано удаление пробки 30 с конца трубы 3. Очень часто трубы 3 снабжаются на противоположных концах защитными пробками 30, при этом, захватывающее устройство 16 оборудуется устройством 31 съема пробок. В показанном примере, каждый захватывающий элемент 24 действует совместно с устройством 31 съема пробок, которое содержит рычаг 32, шарнирно закрепленный на головке 28, присоску 33, установленую на рычаг 32, и исполнительный механизм 34 для установки рычага 32 параллельно ниппелю 29, при этом, присоска 33 устанавливается перед свободным концом ниппеля 29, и для перемещения рычага 32 и присоски 33 в исходное положение, освобождающее путь для вставления ниппеля 29 внутрь трубы 3, как показано на фиг.7.
Пробка 30 удаляется координированным перемещением захватывающего элемента 24 и устройства 31 съема пробок; когда рычаг 32 и присоска 33 устанавливаются в рабочее положение, показанное на фиг.4, захватывающий элемент 24 перемещается вперед к пробке 30 для прикрепления присоски 33 к пробке 30, захватывающий элемент 24 затем вытягивается из трубы 3 для удаления пробки 30 из трубы 3 и рычаг 32, присоска 33 и пробка 30 перемещаются в исходное положение (фиг.5 и 6) для обеспечения соединения захватывающего элемента 24 с трубой 3, как показано на фиг.7.
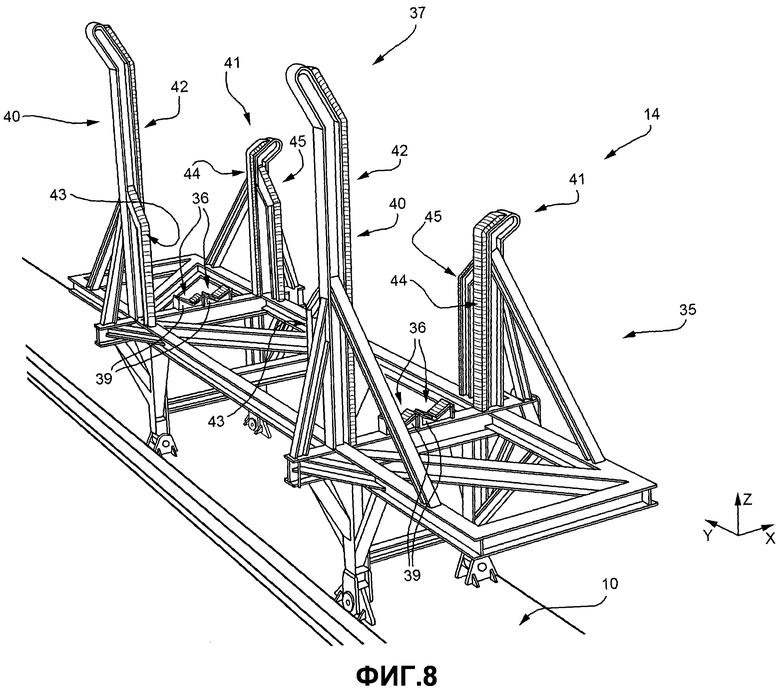
Показанный на фиг.8 манипулятор 13 подбирает две трубы 3 за один раз и временно укладывает их на соответствующий пост 14 перегрузки, откуда они затем перемещаются одним из кранов 7 на судне-трубоукладчике 1 (фиг.1). Каждый пост 14 перегрузки содержит раму 35, образующую два места 36 для соответствующих труб 3, и направляющую систему 37 для установки захватывающего устройства 38 крана 7 (фиг.9 и 10). Показанные на фиг.8 опорные элементы 36, по существу, образованы лотковыми опорами 39, и направляющая система 37, по существу, содержит две пары стоек 40 и 41. Конкретнее, стойки 40 и 41 образуют четыре угла прямоугольника, и стойки 40 выставлены вдоль одной стороны прямоугольника и имеют высоту больше стоек 41. Каждая стойка 40 образует направляющую 42, обращенную к стойке 41, и направляющую 43, обращенную к другой стойке 40. Аналогично, каждая стойка 41 образует направляющую 44, обращенную к стойке 40, и направляющую 45, обращенную к другой стойке 41. Направляющие 42, 43, 44, 45 содержат соответственно прямые параллельные участки и соответственно наклонные верхние концевые участки. Направляющие 42 длиннее направляющих 44, которые длиннее направляющих 43 и 45. В системе координат xyz направляющие 42 и 44 устанавливают захватывающее устройство 38 (фиг.9) относительно оси x, и направляющие 43 и 45 устанавливают захватывающее устройство 38 (фиг.9) относительно оси y.
Перепад высоты направляющих 42 и 44 также обеспечивает ввод захватывающего устройства 38 (фиг.9) в пост 14 перегрузки вдоль оси x, и не только вдоль оси z. Факт, что направляющие 43 и 45 ниже направляющих 42 и 44 обеспечивает установку захватывающего устройства 38 (фиг.9) вначале вдоль оси x и затем вдоль оси y.
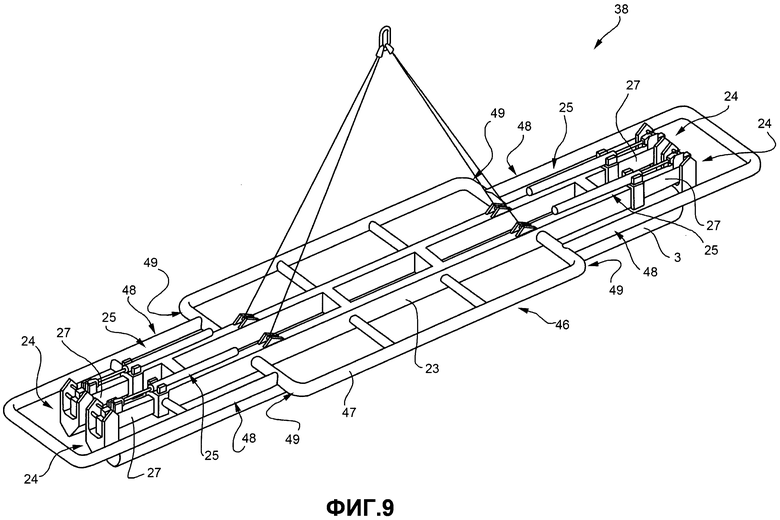
Соответственно, как показано на фиг.9, захватывающее устройство 38, по существу, содержит одинаковые конструктивные части с захватывающим устройством 16 и является оборудованием, устанавливающим в нужное положение раму 46, установленную на удлиненной конструкции 23.
Кроме совместной работы с направляющей системой 37, установочная рама 46 также защищает захватывающее устройство 38 и трубы 3 от случайных ударов.
В показанном примере, установочная рама 46 образована плоской трубной конструкцией, имеющей оконтуренный наружный край 47 и содержащей восемь установочных зон 48 и 49. Зоны 48 выполнены для совместной работы с направляющими 42 и 44, и зоны 49 выполнены для совместной работы с направляющими 43 и 45. Каждая зона 48 параллельна удлиненной конструкции 23 захватывающего устройства 16, и каждая зона 49 перпендикулярна удлиненной конструкции 23 и смежна с соответствующей зоной 48.
На фиг.10 показано захватывающее устройство, соединенное с тросом 50 крана 7 и располагающееся внутри направляющего устройства 37. Пост 14 перегрузки оборудован постом загрузки (не показано), исполнительными механизмами 25 для управления захватывающим устройством 38 и автоматическим соединительным устройством (не показано) для соединения захватывающего устройства 38 с постом загрузки (не показано).
В альтернативном варианте осуществления (не показано) настоящего изобретения исполнительные механизмы захватывающего элемента исключены, и выполнено захватывающее устройство пассивного типа, в котором захватывающие элементы управляются исполнительными механизмами, встроенными в пост перегрузки.
Показанное на фиг.1 судно-трубоукладчик 1 также содержит пост 51 разгрузки, по существу идентичный посту 14 перегрузки, и где трубы 3 разгружаются в продолжение складирования в зоне 8 складирования.
Перегрузка труб 3 с транспортного судна 2 на судно-трубоукладчик 1, по существу, содержит перегрузку труб 3 из трюма 11 на пост 14 перегрузки с использованием манипулятора 13. Трубы 3 можно доставать из трюма одну за другой или, как описано, параллельными парами, в таком случае трубы 3 располагаются в порядке с равными интервалами внутри трюма 11. Поскольку манипулятор 13 и пост 14 перегрузки оба располагаются на транспортном судне 2, и килевая и бортовая качка транспортного судна 2 не влияет на перегрузку труб 3 из трюма на пост 14 перегрузки, данные операции можно автоматизировать, исключив работу персонала внутри трюма или вблизи поста 14 перегрузки.
Как показано на фиг.10, направляющая система 37 работает совместно с захватывающим устройством 38 на посту 14 перегрузки для направления захватывающего устройства 38 в нужное положение для автоматического захвата труб 3, временно размещенных на опорных элементах 36 поста 14 перегрузки. Несмотря на то, что захватывающее устройство 38 подвешено на тросе 50 и поэтому подвержено раскачиванию, направляющая система 37 способна устанавливать захватывающее устройство 38 в нужное положение для захвата труб 3. Таким образом, несмотря на то, что кран 7 установлен на судне-трубоукладчике 1, и имеется неизбежное относительное перемещение между постом 14 перегрузки и краном 7, захватывающее устройство 38 может, при этом, устанавливаться на пост перегрузки, по существу, не требуя физической работы персонала.
После захвата труб 3 захватывающим устройством 38 кран 7 перегружает их на судно-трубоукладчик 1 и высвобождает их на посту 51 разгрузки.
Показанные на фиг.11 судно-трубоукладчик 1 и транспортное судно 2 оборудованы соответствующими системами 52, 53 динамического позиционирования, содержащими соответствующие блоки 54, 55 управления и соответствующие несколько подруливающих движителей 56, 57. Каждая система 52, 53 динамического позиционирования содержит датчики и органы управления (не показано) для определения положения и/или курса соответствующего судна.
Судно-трубоукладчик 1 содержит две точки 58 привязки на надводной части, в показанном примере, на противоположных сторонах - плавучей конструкции 4. Система динамического позиционирования 53 содержит датчики 59 для обнаружения точек 58 привязки и обеспечения установки системой динамического позиционирования 53 транспортного судна 2 в нужное положение относительно судна-трубоукладчика 1 во время перегрузки и удержания в таком положении, когда кран 7 судна-трубоукладчика 1 и пост 14 перегрузки транспортного судна 2 остаются в одном положении относительно друг друга.
Транспортное судно 2 может подходить ближе к судну-трубоукладчику 1, и его положение поддерживается как вручную, так и автоматически. В режиме ручного управления подруливающими движителями 57 управляют с использованием джойстика (не показано) на основе информации с датчиков 59.
Настоящее изобретение предусматривает высокий уровень автоматизации перегрузки труб для улучшения безопасности и обеспечивает перегрузку даже в условиях бурного моря.
Кроме того, пост 14 перегрузки, захватывающее устройство 38 и манипулятор 13 могут поставляться в форме комплекта для модернизации существующих судов для работы согласно описанному способу перегрузки.
Естественно, можно выполнять изменения описанного варианта осуществления настоящего изобретения без отхода от защищенного объема прилагаемой формулы изобретения.
Изобретение относится к перегрузочным операциям в море и касается подачи труб с транспортного судна на судно-трубоукладчик. Способ перегрузки труб с транспортного судна на судно-трубоукладчик предусматривает захват труб в трюме транспортного судна и высвобождение труб в нужном положении внутри поста перегрузки на транспортном судне с помощью манипулятора, установленного на транспортном судне, и направление захватывающего устройства, соединенного с краном в нужное положение на посту перегрузки. Предложены также система и комплект для перегрузки труб с транспортного судна на судно-трубоукладчик. Технический результат заключается в повышении безопасности операции по перегрузке труб, в том числе в условиях сильного волнения моря. 3 н. и 19 з.п. ф-лы, 11 ил.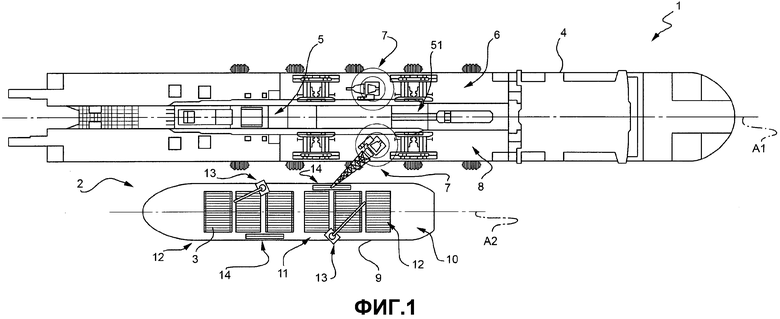
1. Способ перегрузки труб с транспортного судна на судно-трубоукладчик, содержащий этапы, на которых осуществляют захват труб (3) в трюме (11) транспортного судна (2) и высвобождение труб (3) в нужном положении внутри поста (14) перегрузки на транспортном судне (2) с использованием манипулятора (13), установленного на транспортном судне (2), и направление захватывающего устройства (38), соединенного с краном (7), в требуемое положение на посту (14) перегрузки.
2. Способ по п.1, в котором на этапе направления захватывающего устройства (38) осуществляют установку захватывающего устройства (38) относительно первой оси (X) с помощью четырех параллельных первых направляющих (42, 44), и установку захватывающего устройства (38) относительно второй оси (Y) с помощью четырех параллельных вторых направляющих (43, 45); причем, первые и вторые направляющие (42, 44, 43, 45) предпочтительно имеют наклонные участки на своих верхних концах.
3. Способ по п.2, в котором на этапе направления захватывающего устройства (38) осуществляют установку захватывающего устройства (38) вначале вдоль первой оси (X) и затем вдоль второй оси (Y).
4. Способ по п.1, в котором манипулятор (13) содержит кран с гидравлически управляемой стрелой (15), достающий до любой точки в трюме (11).
5. Способ по п.1, в котором на этапе захвата труб (3) в трюме (11) осуществляют установку дополнительного захватывающего устройства (16) в любой точке в трюме (11) с помощью крана с гидравлически управляемой стрелой (15); причем, манипулятор (13) содержит кран с гидравлически управляемой стрелой, и дополнительное захватывающее устройство (16) для захвата труб (3).
6. Способ по п.5, в котором на этапе захвата труб (3) в трюме (11) осуществляют установку дополнительного захватывающего устройства (16) поверх и параллельно, по меньшей мере, одной трубе (3); и размещение захватывающих элементов (24), по меньшей мере, частично, внутри трубы (3).
7. Способ по п.6, содержащий этап, на котором перед захватом трубы (3), удаляют пробки (30) из противоположных концов трубы (3) с помощью устройств (31) съема пробок, совместно работающих с захватывающими элементами (24); причем каждый захватывающий элемент (24) работает совместно с устройством (31) съема пробок перемещающимся между рабочим положением и исходным положением.
8. Способ по п.1, содержащий этап захвата нескольких параллельных труб (3) одновременно в трюме (11), и установки нескольких труб одновременно на пост (14) перегрузки с помощью манипулятора (13).
9. Способ по п.1, содержащий этап установки и удержания транспортного судна (2) в требуемом положении относительно судна-трубоукладчика (1) с помощью системы (53) динамического позиционирования.
10. Комплект для перегрузки труб с транспортного судна на судно-трубоукладчик, содержащий захватывающее устройство (38) для захвата труб (3) и соединяющееся с краном (7); пост (14) перегрузки для размещения труб (3) временно в требуемом положении, и для направления захватывающего устройства (38) в требуемое положение; и манипулятор (13), установленный на транспортном судне (2) для захвата труб (3) в трюме (11) транспортного судна (2) и высвобождения труб (3) в нужном положении внутри поста (14) перегрузки.
11. Комплект по п.10, в котором пост (14) перегрузки содержит направляющую систему (37) для установки захватывающего устройства (38) в требуемое положение.
12. Комплект по п.10, в котором направляющая система (37) содержит четыре параллельных первых направляющих (42, 44) для установки захватывающего устройства (38) относительно первой оси (X); и четыре параллельных вторых направляющих (43, 45) для установки захватывающего устройства (38) относительно второй оси (Y); причем и первые и вторые направляющие (42, 44, 43, 45) предпочтительно имеют наклонные участки на своих верхних концах.
13. Комплект по п.12, в котором первые направляющие (42, 44) выше вторых направляющих (43,45).
14. Комплект по п.12, в котором две из первых направляющих (42) выше других двух первых направляющих (44).
15. Система для перегрузки труб с транспортного судна на судно-трубоукладчик, содержащая транспортное судно (2), имеющее трюм (11) для размещения труб (3); манипулятор (13), установленный на транспортном судне (2) для захвата труб (3) в трюме (11) транспортного судна (2) и высвобождения труб (3) в нужном положении внутри поста (14) перегрузки, расположенного на транспортном судне (2) с использованием судна-трубоукладчика (1), имеющего кран (7), снабженный захватывающим устройством, и выполненного с возможностью направления захватывающего устройства (38), в требуемое положение на посту (14) перегрузки.
16. Система по п.15, в которой пост (14) перегрузки содержит четыре параллельных первых направляющих (42, 44) для установки захватывающего устройства (38) относительно первой оси (X); и четыре параллельных вторых направляющих (43, 45) для установки захватывающего устройства (38) относительно второй оси (Y); причем, первые и вторые направляющие (42, 44, 43, 45) предпочтительно имеют наклонные участки на своих верхних концах.
17. Система по п.15, в которой манипулятор (13).содержит кран с гидравлически управляемой стрелой (15), достающий до любой точки в трюме (11).
18. Система по п.15, в которой манипулятор (13).содержит кран с гидравлически управляемой стрелой (15) и дополнительным захватывающим устройством (16), выполненными с возможностью установки в любой точке в трюма (11) для захвата труб (3).
19. Система по п.18, в которой манипулятор (13) содержит захватывающее устройство (16), содержащее захватывающие элементы (24), выполненные с возможностью размещения, по меньшей мере, частично внутри трубы (3).
20. Система по п.19, в которой захватывающее устройство (16) содержит устройства (31) съема пробок (30) для удаления пробок с противоположных концов трубы (3) перед захватом трубы (3), причем каждый захватывающий элемент (24) работает совместно с устройством (31) съема пробок при перемещении между рабочим положением и исходным положением.
21. Система по п.15, в которой манипулятор (13) содержит несколько захватывающих устройств (16) для захвата нескольких параллельных труб (3) одновременно в трюме (11) и установки нескольких труб одновременно на пост (14) перегрузки.
22. Система по п.15, в которой транспортное судно (2) содержит систему (53) динамического позиционирования для установки и удержания транспортного судна (2) в требуемом положении относительно судна-трубоукладчика (1).
| DE 3315888 A1, 08.11.1984 | |||
| Способ одновременного долбления двух зубчатых колес | 1985 |
|
SU1265017A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОНСЕРВОВ "ФЛОЛ" | 2006 |
|
RU2313256C1 |
| СИСТЕМА ПЕРЕДАЧИ ДЛИННОМЕРНОГО ГРУЗА С ОДНОГО СУДНА НА ДРУГОЕ | 1996 |
|
RU2112690C1 |

