Изобретение относится к сканирующей зондовой микроскопии, микромеханике, робототехнике и нанотехнологии, в частности, к шагающим по плоскости устройствам, предназначенным для прецизионного перемещения зонда микроскопа или исследуемого под микроскопом образца на большие в сравнении с диапазоном перемещения пьезосканера расстояния. Изобретение может использоваться в любом приборе из семейства сканирующих зондовых микроскопов (СЗМ): сканирующем туннельном микроскопе (СТМ), сканирующем атомно-силовом микроскопе (АСМ), сканирующем магнитно-силовом микроскопе (МСМ), сканирующем оптическом микроскопе ближнего поля (БОМ) и т.п. Также возможно применение данного изобретения в растровом электронном микроскопе (РЭМ), в установке сфокусированного ионного пучка (СИП), в электронном оже-спектрометре (ЭОС) и в других аналитических приборах, где требуются прецизионные перемещения образца на расстояния в несколько десятков миллиметров. Помимо перемещения зонда СЗМ или исследуемого под микроскопом образца шагающий робот-нанопозиционер способен точно перемещать технологические подложки, а также разного рода микро/нанодатчики и микро/наноинструменты: микро/нанощупы, микро/нанотермопары, микро/наноэлектроды, микро/нанопинцеты, микро/нанопипетки и т.п. Предлагаемый робот-нанопозиционер может работать как на воздухе при атмосферном давлении, так и в вакууме (от низкого до сверхвысокого). Робот-наноозиционер способен сохранять работоспособность и точностные характеристики в широком диапазоне температур.
В настоящее время известно несколько конструкций и несколько способов передвижения шагающих позиционеров [1, 2, 3, 4, 5, 6, 7, 8, 9, 10], которые могут быть отнесены к аналогам заявляемого изобретения. Как правило, шагающий позиционер представляет собой перемещаемую платформу 1 (см. Фиг. 1), на которой посредством держателя 2 закреплен либо исследуемый под микроскопом образец 3, либо зонд микроскопа. Платформа имеет как минимум три опоры 4, снабженные электростатическими фиксаторами 5. Опоры позиционера 4 устанавливаются на плоскую гладкую поверхность 6 некоторого основания 7. Плоскую гладкую поверхность 6, с которой контактируют опоры позиционера, будем называть несущей поверхностью. Передвигая опоры по очереди в заданном направлении на заданную величину с заданной скоростью, позиционер совершает перемещение (шагание) по несущей поверхности. Возможен вариант использования шагающего позиционера "опорами вверх", когда опоры заделаны в неподвижное основание позиционера, а сверху на свободные концы опор устанавливается перемещаемая платформа, на которой закреплен образец либо зонд микроскопа.
Следует обратить внимание на то, что при использовании конфигурации "опорами вниз" диапазон перемещения шагающего позиционера принципиально неограничен, а при использовании конфигурации "опорами вверх" ограничен. Каждый раз, когда требуется увеличить диапазон перемещений позиционера в конфигурации "опорами вверх", необходимо увеличивать расстояние между опорами (базу позиционера). Увеличение расстояния между опорами приводит к увеличению веса позиционера и его габаритов. В конфигурации позиционера "опорами вниз" диапазон перемещения неограничен для любых расстояний между опорами.
Несмотря на принципиальное ограничение диапазона перемещения, конфигурация позиционера "опорами вверх" обладает определенным преимуществом по сравнению с конфигурацией "опорами вниз". Преимущество заключается в том, что для используемого на практике диапазона перемещений 5-10 мм вес подвижной части позиционера при сравнимых габаритах позиционеров оказывается заметно меньше, поскольку в этот вес не входит вес опор и их движителей. Более того, при установке образца в конфигурации "опорами вверх" непосредственно на опоры из конструкции позиционера вообще исключаются перемещаемая платформа с несущей поверхностью и держатель образца. Позиционер с меньшим весом обладает большим быстродействием, в меньшей степени подвержен влиянию внешних, главным образом, низкочастотных механических колебаний, в меньшей степени дрейфует при изменении температуры и в меньшей степени деформирует поверхность в местах установки опор.
Основной источник погрешности шагающих позиционеров [1, 2, 3, 4, 5, 6, 7, 8, 9, 10] связан со случайными смещениями (подвижками) позиционера, возникающими в процессе пепедвижения (шагания). Неконтролируемые случайные смещения происходят в местах механического контакта опор с несущей поверхностью и являются определяющим фактором, ограничивающим точность перемещения шагающего позиционера.
До недавнего времени шагающие позиционеры использовались преимущественно для "грубого" подвода зонда к образцу или для "грубого" перемещения зонда по поверхности образца. И в том и в другом случае применение компактных сравнительно простых шагающих позиционеров позволяло осуществлять перемещения по плоскости на большие в сравнении с диапазоном точного позиционера (сканера) расстояния.
Что касается шага перемещения, то его величина могла намного превосходить случайное смещение в месте контакта, поскольку, как правило, требовалось обеспечить шаг грубого позиционера сравнимый с диапазоном перемещения точного позиционера. Диапазон перемещения точного позиционера обычно составляет несколько десятков микрон, поэтому случайное смещение на десятки нанометров, действующее на фоне большого шага микронных размеров, приводило к приемлемой для широкого круга задач относительной погрешности позиционирования. Следует отметить, что конструкция шагающих позиционеров предусматривает возможность плавного перемещения образца/зонда из текущей позиции позиционера в следующую [11]. Причем дискретность плавного перемещения может быть сравнима с шагом точного позиционера. Ввиду существования у шагающего позиционера случайной погрешности шага, в большинстве практических применений дискретность плавного перемещения не имеет смысла задавать меньше величины этой погрешности.
По мере развития сканирующей зондовой микроскопии и нанотехнологии требования, предъявляемые к точности шагающих позиционеров, ужесточались. В частности, чтобы использовать способ особенность-ориентированного позиционирования (ООП) [12, 13], требуются шагающие позиционеры, случайные погрешности перемещения которых составляют доли от латеральных размеров особенности поверхности, захватываемой латеральной следящей системой. Типичные латеральные размеры захватываемых на поверхности образца особенностей могут лежать в диапазоне от нескольких десятков нанометров до нескольких ангстрем (характерный размер отдельного атома). Поэтому применение слова "грубый" в названии шагающего позиционера носит в настоящее время достаточно условный характер.
Вкратце способ ООП заключается в том, что одновременно с работой грубого шагающего позиционера задействуется точный позиционер-сканер, которым производится сканирование небольшой окрестности какой-либо особенности поверхности образца (в роли особенности может выступать холмик или ямка). Затем на полученном локальном скане с помощью компьютера выполняется распознавание данной особенности и определяются ее латеральные координаты. После этого центр следующего локального скана совмещается с позицией особенности, определенной в ходе распознавания текущего локального скана. Описанная последовательность действий непрерывно повторяется, в результате чего в латеральной плоскости реализуется автоматическое слежение зонда микроскопа за движущейся особенностью поверхности.
Таким образом, благодаря наличию указанной следящей системы фактическое перемещение грубого позиционера тут же определяется по смещению точного позиционера. Другими словами, происходит фиксация всех погрешностей грубого позиционера как разностей между заданным его перемещением и фактическим. Следовательно, случайные подвижки грубого позиционера, а также погрешности, вызываемыми тепловым дрейфом, ползучестью, паразитными связями, гистерезисом и нелинейностью используемого движителя (пьезокерамического, электромагнитного, магнитострикционного, электростатического и т.п.) грубого позиционера, могут быть устранены применением указанного способа ООП [12, 13].
Случайное смещение шагающего позиционера главным образом связано с микро/нанонеровностями в месте механического контакта опоры позиционера с несущей поверхностью. Кроме микро/нанонеровностей на стабильность перемещения сильное влияние оказывают загрязнения места контакта твердыми микро/наночастицами [1, 2, 3], а также наличие между соприкасающимися поверхностями тонкого адсорбированного из атмосферной влаги слоя воды [4].
Твердые микрочастицы могут как привноситься извне, так и возникать в процессе работы позиционера в результате скалывания (срезания) микронеровностей рельефа в местах контакта опор позиционера с несущей поверхностью. Наночастицы образуются как в результате скалывания (срезания) нанонеровностей, так и путем дробления микрочастиц. Скалывание происходит в тех точках контакта, где возникающие усилия превосходят предел прочности используемых материалов.
Попадание в область контакта либо скалывание в области контакта микрочастицы приводит к скачкообразному смещению опоры на величину, сравнимую с размером микрочастицы. В этом случае позиционер способен обеспечить микронную погрешность перемещения. Наночастицы, заполняя микронных масштабов неровности, вызывают проскальзывание опор, а также дрейф места контакта (здесь наночастицы можно рассматривать как квазижидкость, играющую роль смазки). Попадание в область контакта либо скалывание в области контакта наночастицы приводит к скачкообразному смещению опоры на величину, сравнимую с размером наночастицы. В этом случае речь может идти о позиционировании с нанометровой погрешностью.
Следует различать действительно шагающие позиционеры [1, 2, 3, 4, 5, 6, 7, 8, 9, 10] и перемещающиеся на шаг инерционные позиционеры [10, 14, 15, 16, 17, 18, 19]. В шагающих позиционерах шаг выполняется путем поочередного передвижения опор по несущей поверхности. В инерционных позиционерах шаг выполняется путем одновременного передвижения опор по несущей поверхности. В начальный момент все три пьезокерамические опоры-движители инерционного позиционера медленно увеличивают в длину (здесь рассматривается конфигурация "опорами вверх", см. работу [14]), что вызывает отвод зонда микроскопа от образца на безопасное расстояние. Затем пьезокерамические опоры быстро сжимают по длине и резко изгибают (задается такая величина сжатия, при которой случайного касания зондом поверхности образца не происходит). В силу инерции массивная перемещаемая платформа остается на месте, тогда как более легкие свободные концы опор проскальзывают в местах контактов с несущей поверхностью и смещаются на некоторую величину (шаг) в латеральной плоскости. Затем опоры сравнительно медленно возвращают в исходное положение. В результате происходит перемещение образца/зонда относительно зонда/образца на один шаг в латеральной плоскости. Быстрое сжатие опор на втором этапе перемещения требуется для того, чтобы уменьшить силу трения покоя между опорами и несущей поверхностью и тем самым облегчить процесс проскальзывания.
Инерционное перемещение можно также выполнить применяя обратную последовательность действий: вначале медленно увеличить длину опор и медленно изогнуть их, что приведет к смещению массивной платформы, а затем быстро сжать опоры по длине и резко разогнуть, вызвав проскальзывание. Из описанных выше последовательностей действий сразу становится очевидным один из недостатков инерционного способа передвижения - изменение длины и изгиб опор вызывают заметное нефункциональное (паразитное) смещение позиционера в вертикальной плоскости.
Как видно из приведенного выше описания, инерционные позиционеры по ряду признаков близки к шагающим позиционерам и, следовательно, могут быть отнесены к аналогам заявляемого изобретения. В целом при таком же большом диапазоне перемещения, как и у шагающих позиционеров, инерционные позиционеры принципиально дают гораздо худшую воспроизводимость шага (соответственно, большее по величине минимальное перемещение) из-за плохо контролируемого процесса проскальзывания в месте контакта (фрикционной связи) выступа опоры с несущей поверхностью. Слабая контролируемость проскальзывания связана с вариациями шероховатости (коэффициента трения) соприкасающихся поверхностей.
Другим недостатком инерционных позиционеров является то, что шаг и погрешность перемещения оказываются разными для разных по весу образцов [14, 18]. Дело в том, что работа инерционных позиционеров сильно зависит от нагрузки на опору (веса образца), которая определяет действующую силу трения. Даже небольшое изменение веса образца может вызывать существенное изменение величины шага, т.е. существенно увеличить погрешность перемещения [18]. Ввиду зависимости от нагрузки инерционные позиционеры также чувствительны и к наклону основания, на которое устанавливается позиционер (образец необходимо наклонять на десятки градусов, например, при измерениях на РЭМ). Кроме того, максимальный вес образца (порядка 80 грамм [14]), который инерционные позиционеры в состоянии перемещать, принципиально, гораздо меньше того, который способны переместить шагающие позиционеры.
Чтобы лучше определить контакт на шероховатой несущей поверхности, можно увеличить нормальную нагрузку на область контакта [15]. В ходе возникающей под действием приложенной нагрузки упругой/пластической деформации на несущей поверхности, изготавливаемой, как правило, из менее твердого, чем контактная часть опоры, материала, происходит образование ответной части контакта. Однако эффективность такого подхода в плане повышения точности позиционирования оправдывается только в том случае, когда при установке опоры ее выступ встанет на плоский горизонтальный участок (ПГУ) либо точно попадет в углубление, хорошо совместимое с выступом по форме и размерам. Если же выступ опоры встанет на холмик или попадет на боковую поверхность ямки, то произойдет соскальзывание, скалывание или какая-либо иная неуправляемая релаксация контакта, приводящая к случайным подвижкам и механическим дрейфам.
В существующих позиционерах из-за большой площади соприкосновения между шероховатой поверхностью опоры и шероховатой несущей поверхностью фактические точки контакта полностью не определены, поэтому вероятность возникновения указанной релаксации высока. Чтобы повысить устойчивость опоры, нужно стремиться минимизировать область контакта - в идеале перейти к точечному контакту (определить контакт как точечный). Уменьшение области контакта вызывает рост давления, величина которого, в свою очередь, накладывает ограничения на вес позиционера и вес переносимого позиционером образца/зонда.
Следует отметить, что при работе на воздухе и при работе в вакууме [10] шаг и погрешность перемещения при всех прочих равных условиях у инерционных позиционеров также будут различными, поскольку на воздухе на несущую поверхность из атмосферной влаги будет адсорбироваться вода, даже тонкая пленка которой в состоянии существенно повлиять на коэффициент трения в месте контакта.
При изгибе опор из-за небольших различий, связанных с погрешностями изготовления опор, движителей, неоднородностью материала пьезокерамики, неодинаковостью уровней управляющих сигналов и т.п., технически трудно добиться того, чтобы все три опоры одновременно отклонились строго в одном направлении и на одну и ту же величину [18]. В результате платформа, которая должна переместиться в некотором заданном направлении, совершает перемещение и в других направлениях [18]. Данный вид погрешности, указывающий на существование взаимных паразитных связей между X, Y, Z-манипуляторами позиционера (X, Y, Z-манипуляторами позиционера называются узлы, обеспечивающие его перемещение в направлениях X, Y и Z), также возникает из-за неодинаковости условий и мест контакта опор с несущей поверхностью [15, 18]. Причем последние не могут быть никак скомпенсированы/исправлены, поскольку информация о них полностью отсутствует.
Кроме того, перед применением инерционных позиционеров из-за больших ускорений и заметных смещений в вертикальной плоскости зонд микроскопа необходимо отводить от поверхности, чтобы не повредить его и/или поверхность образца во время перемещения [14]. Время, затрачиваемое на отвод зонда и последующий его подвод, существенно снижает производительность измерений и/или технологических воздействий.
Таким образом, проведенный анализ инерционных позиционеров показывает, что в конструкции шагающего позиционера следует избегать каких-либо инерционных элементов, так как их наличие неизбежно приводит к снижению точности перемещения [11].
Состояние контакта (фрикционной связи) в местах установки опор, определяемое шероховатостью поверхности, весом позиционера, адсорбированной влагой и загрязнениями, также заметно влияет на динамические (резонансные) свойства конструкции как шагающего, так и инерционного позиционеров. Ухудшение динамических свойств приводит к проникновению в систему регистрации положения зонда микроскопа большего количества сейсмических и акустических помех, что ограничивает предельное разрешение прибора [15].
Поскольку известные конструкции шагающих позиционеров [1, 2, 3, 4] имеют три опоры, то при выполнении шага позиционер не может оторвать перемещаемую опору от несущей поверхности и поэтому вынужден двигать ее по поверхности, оставаясь все время в контакте с поверхностью. Ввиду того, что пьезодвижитель, предназначенный для перемещения опор в латеральной плоскости - общий для всех трех опор (Фиг. 1, поз. 1; в данной конструкции пьезодвижитель одновременно является и перемещаемой платформой), то для перемещения какой-либо опоры по несущей поверхности две другие опоры должны быть каким-то образом зафиксированы на несущей поверхности, например, с помощью электростатических фиксаторов опор 5 [1, 2, 3, 4, 5, 9].
Перемещение свободно стоящей опоры под действием некоторой силы, прикладываемой в латеральной плоскости, начинается в тот момент, когда прикладываемая сила превысит силу трения покоя. Из-за того, что коэффициент трения покоя, определяющий силу трения покоя, превосходит коэффициент трения движения, определяющий силу трения движения, то в момент начала движения происходит плохо контролируемое скачкообразное смещение позиционера. Указанное скачкообразное смещение напрямую определяет минимальный шаг позиционера. Кроме того, при трении опоры о несущую поверхность происходит нагрев места контакта, что увеличивает температурный дрейф конструкции.
Чтобы зафиксировать опоры шагающего позиционера с требуемым усилием, опорам необходимо контактировать с несущей поверхностью по достаточно большой площади. При большой площади контакта случайным образом на шероховатостях поверхности могут образовываться упомянутые выше неустойчивые контакты, приводящие к нестабильностям положения позиционера в латеральной и вертикальной плоскостях. Кроме того, возникновение/релаксация механических напряжений в местах контакта при фиксации/освобождении опор приводит к случайным подвижкам и к нескомпенсированным моментам. Нескомпенсированные моменты разворачивают позиционер в латеральной плоскости, изменяя заданное направление перемещения.
Из-за волнистости (неплоскостности) несущей поверхности может уменьшиться эффективная площадь контакта и/или увеличиться эффективный зазор, что вызовет уменьшение электростатической силы, фиксирующей опору. При уменьшении электростатической силы ниже некоторого порогового значения опоры шагающих позиционеров [1, 2, 3, 4, 5] начинают проскальзывать, что приводит к погрешностям перемещения. При комнатных температурах наличие тонкого слоя конденсата в области контакта также вызывает проскальзывание опоры. Наличие тонкого слоя конденсата при проведении измерений при низких температурах ведет к залипанию опоры, что существенно ухудшает точность позиционирования [4, 10] в этих условиях.
Анализ известных шагающих позиционеров показывает, что за прототип предлагаемого в настоящей заявке устройства и способа передвижения следует принять шагающий позиционер и способ передвижения [1]. К недостаткам прототипа относятся:
1. Неопределенность (неконтролируемость) фактического места контакта опоры с несущей поверхностью. В частности, неопределенность возникает по причине того, что контакт при установке опоры происходит по большой площади, при этом рельеф опоры и рельеф несущей поверхности в месте их фактического соприкосновения неизвестны. В результате контакт опоры с несущей поверхности может случайным образом происходить в точках, в которых положение позиционера оказывается неустойчивым. В ходе последующего "опрокидывания" и/или "сползания" в устойчивое положение возникает нежелательное перемещение позиционера в латеральной и вертикальной плоскостях.
2. Передвижение опоры без отрыва от несущей поверхности (опора движется, находясь в контакте с поверхностью). Из-за механического взаимодействия (трения) опоры с несущей поверхностью во время ее передвижения происходят неуправляемые микро/наноподвижки и/или микро/нанодеформации, что накладывает ограничение на минимально воспроизводимый шаг (разрешение) позиционера. Кроме того, данное взаимодействие вызывает нагрев контактирующих поверхностей, что приводит к дрейфу позиционера в латеральной и вертикальной плоскостях. При указанном механическом взаимодействии в местах случайного точечного контакта могут возникать большие усилия, приводящие к образованию микро/нанообломков. Микро/нанообломки, в свою очередь, вызывают случайные подвижки, износ и загрязнение рабочих поверхностей позиционера. Загрязнения ведут к появлению дополнительного дрейфа и проскальзывания, увеличивают затраты на обслуживание.
3. Использование электростатической (или какой-либо иной) фиксации установленных опор. Механическое взаимодействие опоры с несущей поверхностью во время ее фиксации/освобождения вызывает неуправляемые микро/наноподвижки, приводящие к случайному смещению позиционера в латеральной и вертикальной плоскостях. Наличие фиксаторов не позволяет устанавливать позиционер в конфигурации "опорами вниз" непосредственно на большого размера объект, по которому требуется совершить перемещение, а в конфигурации "опорами вверх" устанавливать исследуемый образец непосредственно на опоры позиционера. Кроме того, при работе на воздухе электрическое поле в области контакта опоры с несущей поверхностью затягивает в эту область заряженные пылинки из окружающего пространства, вызывая быстрое загрязнение рабочих поверхностей и, как следствие, нестабильное позиционирование.
4. Отсутствие компенсации тепловой деформации и ползучести (крипа) пьезопозиционера. Без компенсации тепловой деформации (термодеформации) любое изменение температуры приводит к медленному изменению расстояния между опорами позиционера. Без компенсации ползучести любое перемещение пьезодвижителя также ведет к медленному изменению расстояния между опорами позиционера. Изменение расстояния между опорами вызывает механические напряжения в местах контакта опор с несущей поверхностью, релаксация которых приводит к проскальзыванию опор, т.е. к случайным неуправляемым подвижкам позиционера в латеральной и вертикальной плоскостях. Кроме того, при использовании позиционера совместно со сканирующим зондовым микроскопом любое изменение размеров шагающего позиционера, связанное с изменением температуры, приводит к дрейфу образца относительно зонда микроскопа, что, в свою очередь, вызывает искажение получаемых изображений поверхности.
5. Необходимость отвода зонда микроскопа от поверхности образца перед началом перемещения. Отвод требуется для того, чтобы избежать случайного повреждения зонда и/или поверхности образца, которое может быть вызвано резкой неконтролируемой микро/наноподвижкой позиционера в вертикальной плоскости. Отвод зонда и последующий его подвод существенно увеличивают время позиционирования. Необходимость отвода исключает возможность использования способа ООП, с помощью которого можно исправлять погрешности шагающего позиционера и с высокой точностью перемещать поле точного позиционера (сканера) в поле грубого позиционера [12, 13].
Чтобы избавиться от указанных выше недостатков прототипа предлагается:
1. Определить и стабилизировать область контакта опоры с несущей поверхностью, что достигается уменьшением до минимума области контакта (размеры области контакта ограничены прочностью используемых материалов), приданием кончику опоры определенных формы и размеров, приданием ответной части несущей поверхности определенных форм и размеров (в одном из вариантов исполнения робота-нанопозиционера), выбором соответствующих материалов для кончика опоры и несущей поверхности, управлением процессом образования контакта.
2. Увеличив число опор, снабдив опоры собственными движителями, управляя положением центра тяжести (в одном из вариантов исполнения робота-нанопозиционера), отказаться от фиксации опор позиционера и при движении полностью отрывать перемещаемую опору от несущей поверхности.
3. Контролировать процесс установки опоры на несущую поверхность путем точного совмещения миниатюрного выступа на кончике опоры с ответным углублением на несущей поверхности. Установка опоры осуществляется только в то место, где форма и размеры углубления несущей поверхности в наибольшей степени совпадают с формой и размерами выступа кончика. В случае существования альтернативных вариантов установки управляющей программой выбирается тот из них, который лучше остальных соответствует позиции устойчивого равновесия и обеспечивает наибольший запас устойчивости.
4. С целью компенсации термодрейфа движителей применить X, Y, Z-движители, каждый из которых представляет собой два одинаковых движителя, включенных встречно.
5. Определять дрейф робота-нанопозиционера относительно несущей поверхности, возникающий в результате тепловой деформации конструкции и ползучести пьезодвижителей; вносить соответствующие смещения в положения установленных опор, компенсирующие этот дрейф; передавать информацию о выявленном дрейфе в сканирующий зондовый микроскоп для коррекции получаемых изображений поверхности.
6. Использовать для изготовления элементов конструкции робота-нанопозиционера материалы с малыми коэффициентами теплового расширения, такие, например, как инвар, плавленый кварц, зеродур (англ. Zerodur).
7. Компенсировать тепловое расширение/сжатие элементов конструкции робота-нанопозиционера, имеющих положительный коэффициент теплового расширения, соответствующим тепловым сжатием/расширением в элементах конструкции с отрицательным коэффициентом теплового расширения.
8. Компенсировать (в одном из вариантов исполнения устройства) возникающую при тепловой деформации разницу расстояний между опорами робота-нанопозиционера и расстояний между местами установки этих опор на несущей поверхности путем изготовления основы несущей поверхности из того же (или близкого по величине термодеформации) материала, что и основное тело робота-нанопозиционера.
Перечисленные выше изменения в конструкции и способе передвижения шагающего позиционера были реализованы в настоящем изобретении. Вертикальный отрыв перемещаемой опоры от несущей поверхности и ее латеральный перенос в новую позицию без контакта с несущей поверхностью, в принципе, исключают из процесса передвижения шагающего робота-нанопозиционера всякое трение. Отсутствие трения позволяет избежать механического взаимодействия шероховатых поверхностей опоры и несущей поверхности друг с другом. Кроме того, исключается плохо контролируемая подвижка в момент начала латерального смещения опоры, которая возникает в прототипе из-за заметного различия между коэффициентом трения покоя и коэффициентом трения движения.
Следует отметить, что в предлагаемой конструкции сила трения покоя возникает только при наклоне плоскости перемещения шагающего робота-нанопозиционера. Чтобы избежать соскальзывания шагающего робота-нанопозиционера при его наклоне, требуемое значение коэффициента трения покоя жестко выдерживается путем точного управляемого совмещения выступа устанавливаемой опоры с углублением несущей поверхности, при котором форма и размеры выступа в наибольшей степени согласуются с формой и размерами углубления. Причем, чем больше наклон, тем более глубокие ямки выбираются программой управления роботом для установки опоры. В одном из вариантов исполнения, описываемом ниже, под действием веса робота-нанопозиционера или силы прижимной пружины выступ на кончике опоры формирует ответное углубление на ПГУ несущей поверхности. При этом деформация, вызывающая появление углубления, может быть как упругой, так и пластичной. Наибольшая сила трения покоя возникает при пластической деформации, так как в ходе этой деформации образуются ямки большей глубины, а соприкосновение поверхностей в контакте происходит по большей площади.
Для отрыва опоры от несущей поверхности при движении робота-нанопозиционера необходимо вместо отрываемой опоры устанавливать, по крайней мере, еще одну опору, которая не даст роботу-нанопозиционеру опрокинуться. Кроме того, отказ от фиксации опор предполагает наличие у каждой опоры своих собственных средств перемещения в пространстве.
Для реализации полноценного шагания, т.е. шагания, при котором опоры робота-нанопозиционера поочередно отрываются от несущей поверхности, переносятся на шаг в новое место и устанавливаются на несущую поверхность, кроме еще одной четвертой опоры, необходимо предусмотреть возможность управляемого смещения центра тяжести. В противном случае минимальное число опор шагающего робота-нанопозиционера должно быть равно пяти.
У роботов-нанопозиционеров с числом опор более трех возможны следующие два способа перемещения. В первом способе робот-нанопозиционер контактирует с несущей поверхностью посредством трех опор. Во втором способе количество одновременно установленных опор не ограничено. Рассмотрим вначале первый способ. Как известно, для того чтобы гарантировать устойчивость любого позиционера на плоскости, необходимо использовать базирование по трем точкам (в нашем случае роль базовой плоскости выполняет несущая поверхность).
Например, робот-нанопозиционер с четырьмя опорами, которые расположены в углах квадрата (прямоугольника, ромба, трапеции и т.п.), в процессе передвижения поочередно отрывает одну из трех задействованных опор, устанавливая вместо нее незадействованную (свободную) опору, при этом каждый раз оставаясь стоять на трех опорах. Причем незадействованную опору можно устанавливать вместо любой заранее выбранной задействованной опоры, смещая центр тяжести робота-нанопозиционера в соответствующем направлении. Устойчивость робота-нанопозиционера будет тем выше, чем ближе будет расположен смещенный центр тяжести к центру "тяжести" треугольника, образованного установленными опорами.
Чтобы минимизировать смещение робота-нанопозиционера в вертикальной плоскости, происходящее при передаче контакта (по величине это смещение существенно меньше смещений, возникающих в ходе перемещения инерционного позиционера), следует удлинение устанавливаемой опоры производить одновременно со сжатием снимаемой опоры, начиная с того момента, когда центр тяжести робота-нанопозиционера пересек границу устойчивости устройства. После смены трех опор выполняется плавное перемещение платформы в заданном направлении на заданную величину при помощи X, Y-движителей установленных опор.
Робот-нанопозиционер с пятью опорами, расположенными в углах правильного пятиугольника (см. Фиг. 2а), для выполнения одного шага должен последовательно выполнить три смены опор. В ходе каждой смены очередная установленная опора заменяется такой незадействованной опорой, после установки которой робот-нанопозиционер остается стоять на трех опорах, образующих равнобедренный треугольник (обозначен пунктирной линией). В данном роботе-нанопозиционере наличие средств управления его центром тяжести является необязательным. При смене опор в таком роботе-нанопозиционере всегда известно, какая из установленных опор будет оторвана от поверхности. Поэтому, чтобы минимизировать паразитное смещение робота-нанопозиционера в вертикальной плоскости, происходящее во время передачи контакта, следует одновременно с удлинением устанавливаемой опоры производить сжатие снимаемой опоры. После смены трех опор выполняется плавное перемещение платформы в заданном направлении на заданную величину при помощи X, Y-движителей установленных опор.
Если изготовить расположенные горизонтально прямоугольные "лучи" звезды из биморфных (англ. bimorph) пьезоэлементов (см. Фиг. 2а; прямоугольная форма лучей приведена только как пример), то получатся Z-движители, которые можно использовать либо вместо Z-движителей, обозначенных на фигуре цифрой 4, либо как дополнение к ним. Перемещение опор в вертикальной плоскости достигается путем изгиба биморфных пьезоэлементов, для чего на образующие биморф пьезопластины подаются напряжения соответствующей полярности (полярность питающих напряжений и направления поляризации пьезопластин биморфа в данном режиме определяются используемой схемой включения).
Кроме того, применяя биморфные элементы, изгибающиеся в горизонтальной плоскости, можно осуществить перемещение опор в тангенциальном направлении. Биморфные элементы, предназначенные для перемещения в вертикальном и/или в тангенциальном направлениях, также можно использовать для перемещения опор в радиальном направлении путем одновременного сжатия/удлинения пьезоэлементов, из которых состоит биморф. Для сжатия/удлинения на пьезопластины биморфа подаются напряжения соответствующей полярности (полярность питающих напряжений и направления поляризации пьезопластин биморфа в данном режиме определяются используемой схемой включения). Таким образом, применяя комбинацию (сборку) биморфных пьезоэлементов можно осуществить перемещение опоры в вертикальном, тангенциальном и радиальном направлениях. Кроме биморфных пьезоэлементов здесь могут использоваться униморфные (англ. unimorph), мультиморфные (англ. multimorph) и другие подобные им элементы.
Соединительный элемент в центре платформы - пентагон, также может служить для перемещения образца/зонда в вертикальной плоскости, если его изготовить, например, из пьезокерамического материала. Таким образом, лучи звезды и центральный элемент робота-нанопозиционера могут не просто выполнять роль соединительных/несущих элементов конструкции, но и одновременно использоваться в качестве движителей. Ниже при рассмотрении других конструкций под лучами и центральным элементом следует иметь в виду указанные выше возможности их использования.
Как было заявлено выше, установка опоры робота-нанопозиционера осуществляется только в то место несущей поверхности, где форма и размеры углубления в наибольшей степени совпадают с формой и размерами выступа кончика опоры. Рассматриваемая область контакта может быть образована, например, конусообразной опорой, опорой в виде полусферы, параболоида вращения, пирамиды, тетраэдра и т.п. Указанные виды опор можно установить в углубление несущей поверхности (либо на ПГУ несущей поверхности ПГУ можно рассматривать как ямку, глубина которой равна нулю).
Таким образом, различного рода ямки, траншеи, выемки, поры, впадины, бороздки, царапины, щели, трещины, воронки, кратеры, области между зернами и т.п. образования, а также ПГУ являются предпочтительными местами на поверхности, куда следует поместить кончик перемещаемой опоры. Для краткости любое из этих образований будем называть ямкой или углублением. Холмики, частицы, зерна, кластеры, кристаллиты, пылинки и т.п. элементы поверхности или объекты на поверхности, напротив, являются местами, куда установка опоры робота-нанопозиционера запрещена. Для краткости любое из данных образований будем называть холмом.
Способ образования контакта между выступом 5 кончика опоры и несущей поверхностью 6 состоит в следующем. Вначале с помощью X, Y, Z-движителей устанавливаемой опоры (на чертеже X, Y, Z-движители опоры и сама опора условно изображены в виде одного элемента 4, имеющего форму параллелепипеда) производится сканирование небольшого участка несущей поверхности в окрестности того места, куда предполагается установить данную опору. В зависимости от исполнения робота-нанопозиционера сканирование осуществляется или самим выступом 5 опоры, используемым в этом случае в качестве зонда, или специальным зондом, расположенным на кончике опоры.
Целью сканирования является получение топографии рельефа поверхности в области предполагаемого места установки опоры. В зависимости от исполнения для получения топографии можно использовать туннельный ток, протекающий между зондом и несущей поверхностью после приложения небольшой разности потенциалов (используется принцип работы СТМ [20, 21]) или силы межатомного притяжения/отталкивания, действующие между специальным зондом на упругой микроконсоли и несущей поверхностью (используется принцип работы АСМ [20, 21, 22, 23]), или другие способы измерения микро/нанорельефа поверхности. Для работы в режиме СТМ несущая поверхность и зонд должны проводить электрический ток, для работы в режиме АСМ несущая поверхность и зонд могут быть как проводниками, так и диэлектриками.
После получения скана поверхности производится его распознавание и анализ на компьютере в реальном масштабе времени [13, 24]. В ходе распознавания и анализа среди обнаруженных особенностей поверхности (холмиков и ямок) выбирается такая ямка, форма и размеры которой в наибольшей степени совпадают с формой и размерами выступа 5 на кончике опоры. Форма и размеры выступа известны заранее - измерены и/или задаются в ходе изготовления. Далее выступ 5 посредством X, Y-движителей опоры совмещается с координатами найденной ямки в латеральной плоскости, после чего с помощью Z-движителя опоры выступ 5 опускается в ямку несущей поверхности (чтобы минимизировать/исключить паразитное смещение робота-нанопозиционера в вертикальной плоскости установка опоры может выполняться более сложными способами, подробное описание которых дано ниже).
Теперь установленная опора будет устойчиво стоять под действием веса робота-нанопозиционера или силы подпирающей пружины (для вертикально перемещающихся позиционеров либо позиционеров, работающих в невесомости). Наконец, сменив последовательно три опоры, производится плавное перемещение платформы относительно основания робота-нанопозиционера в заданном направлении на заданную величину при помощи X, Y-движителей установленных опор.
При отсутствии подходящих ямок в окрестности предполагаемого места установки опоры можно сместиться в соседнее место и/или увеличить размеры окрестности, после чего повторить сканирование, распознавание и анализ локального скана несущей поверхности. Если и после указанных действий подходящую ямку обнаружить не удается, то следует использовать ПГУ, который можно рассматривать как предельный вид ямки - ямку с нулевой глубиной. Указанные действия по поиску места установки опоры производятся автоматически в соответствии с программой управления робота-нанопозиционера. В целом предлагаемый шагающий робот-нанопозиционер представляет собой устройство, которое в процессе передвижения постоянно подстраивается (адаптируется) к конкретным изменениям микро/нанорельефа несущей поверхности и колебаниям температуры (см. ниже). Именно такая способность к адаптации обеспечивает высокую стабильность передвижения данного робота-нанопозиционера.
Следует отметить, что если в процессе смены опор зонд сканирующего микроскопа подведен к поверхности образца, то, наблюдая за реакцией следящей системы микроскопа, можно судить о величине и направлении смещения производимого устанавливаемой и снимаемой опорами. Располагая указанными величиной и направлением смещения, можно настолько точно управлять процессом установки-снятия опоры, что паразитное смещение шагающего робота-нанопозиционера в вертикальной плоскости, возникающее во время передачи контакта, будет практически сведено к нулю.
В том случае, когда и опора, и несущая поверхность являются проводниками или имеют проводящее покрытие, минимизацию паразитного смещения шагающего робота-нанопозиционера в вертикальной плоскости можно также выполнить путем контроля за увеличением тока, протекающего через устанавливаемую опору, и уменьшением тока, протекающего через снимаемую опору. Величина тока тем больше, чем меньше расстояние от опоры до несущей поверхности, больше площадь контакта и больше сила давления выступа опоры на несущую поверхность. В случае, когда для сканирования несущей поверхности используются зонды, расположенные на упругих микроконсолях, минимизацию паразитного смещения можно производить путем контроля за увеличением изгиба микроконсоли устанавливаемой опоры и уменьшением изгиба микроконсоли снимаемой опоры.
Вместо робота-нанопозиционера на пяти опорах, расположенных в углах правильного пятиугольника, где каждая опора имеет свои собственные X, Y, Z-движители, можно использовать робот-нанопозиционер, в котором три опоры снабжены собственными X, Y, Z-движителями и поэтому являются активными, а две другие опоры собственных движителей не имеют и, следовательно, являются пассивными. В таком роботе-нанопозиционере пассивные опоры играют вспомогательную роль, они удерживают позиционер до тех пор, пока активная опора не переместится в новую позицию и не будет готова снова принять на себя часть веса позиционера.
Перед установкой на несущую поверхность пассивных опор синхронным перемещением активных опор производится сканирование несущей поверхности зондами пассивных опор. Вначале, наклонив робот-нанопозиционер активными опорами так, чтобы зонд второй пассивной опоры не касался несущей поверхности, производят сканирование несущей поверхности зондом первой пассивной опоры. Затем, наклонив робот-нанопозиционер так, чтобы зонд первой пассивной опоры не касался несущей поверхности, производят сканирование несущей поверхности зондом второй пассивной опоры.
Недостатки данного способа состоят в следующем: робот-нанопозиционер должен быть наклонен в процессе сканирования так, чтобы только один зонд, принадлежащий одной из пассивных опор, взаимодействовал с несущей поверхностью; на несущей поверхности нужно найти сразу два подходящих по форме и размерам углубления, расстояние между которыми равнялось бы фиксированному расстоянию между пассивными опорами; для передвижения робота-нанопозиционера на один шаг необходимо выполнить пять смен опор вместо обычных трех; сканирование мест под установку пассивных опор нужно производить синхронным перемещением трех активных опор. Чтобы исключить первые два недостатка, вместо двух пассивных опор можно ограничиться использованием только одной пассивной опоры.
Шагающий робот-нанопозиционер, изображенный на Фиг. 2а, из конфигурации "опорами вниз" легко может быть переведен в конфигурацию "опорами вверх". Для этого необходимо снять образец 3 с держателя 2, перевернуть позиционер 1 (поз. 1.1 на Фиг. 2б) так, чтобы выступы 5 опор 4 были направлены вверх, и установить позиционер в таком положении на основание 7, присоединив его к основанию посредством держателя образца 2 (поз. 2.1 на Фиг. 2б). Далее сверху на выступы 5 опор 4 поместить либо перемещаемую платформу 1.2, нижняя сторона которой является несущей поверхностью 6, с держателем 2.2, на котором закреплен исследуемый образец 3; либо непосредственно исследуемый образец (например, кремниевую пластину), если вес образца не превышает допустимый, а латеральные размеры образца достаточно большие, чтобы его можно было разместить на опорах робота-нанопозиционера. Ниже при рассмотрении других вариантов конструкции шагающего робота-нанопозиционера следует иметь в виду описанную здесь возможность их использования в конфигурации "опорами вверх".
На Фиг. 3 показан робот-нанопозиционер с шестью опорами, расположенными в углах правильного шестиугольника. Данный позиционер обладает наибольшей устойчивостью, когда он установлен на опоры, образующие равносторонние треугольники (эти треугольники обозначены пунктирной линией). Таким образом, процесс перемещения робота-нанопозиционера с шестью опорами сводится к последовательной замене трех опор, образующих один равносторонний треугольник, на три опоры, образующие другой равносторонний треугольник.
Поскольку при осуществлении указанной замены первая устанавливаемая опора расположена на одинаковом расстоянии от пары установленных опор, то в таком позиционере заранее неизвестно - какая из установленных опор оторвется от несущей поверхности в момент передачи контакта. Чтобы процесс смены опор при установке первой опоры сделать более определенным можно, усложнив конструкцию, предусмотреть средства для смещения центра тяжести. В отсутствии этих средств робот-нанопозиционер сам "выберет" из двух опор ту, которая оторвется. Однако после отрыва опоры робот-нанопозиционер будет находиться вблизи границы устойчивости (будет обладать минимальным запасом устойчивости), поскольку его центр тяжести окажется лежащим на или вблизи границы треугольника, образованного установленными к данному моменту опорами. При установке следующей опоры, робот-нанопозиционер снова окажется вблизи границы устойчивости, однако теперь, то какая опора будет оторвана от несущей поверхности, будет известно заранее. Наконец, установка последней опоры переведет позиционер в максимально устойчивое положение.
Выше, фактически, было описано то, как робот-нанопозиционер с шестью опорами, расположенными в углах правильного шестиугольника, может производить шагающее перемещение путем установки одной группы из трех опор вместо другой группы из трех опор. Три опоры в каждой такой группе образуют равносторонний треугольник, группы опор повернуты относительно друг друга на угол 60°. Можно предложить разновидность данного позиционера (см. Фиг.4), в которой для вертикального перемещения одной группы опор относительно другой группы опор используется Z-движитель 8 групп опор. Можно также предложить еще одну разновидность данного позиционера, в которой как для вертикального, так и для латерального перемещения одной группы опор относительно другой группы опор предусмотрены X, Y, Z-движители 8 групп опор. Таким образом, посредством общих для групп опор X, Y, Z-движителей 8 робот-нанопозиционер может выполнять установку на поверхность одной группы опор вместо другой, перемещение одной группы опор в латеральной плоскости относительно другой, а также сканирование несущей поверхности свободной группой опор.
В предложенных выше вариантах робота-нанопозиционера установка-снятие опор реализуется путем движения в вертикальном направлении устанавливаемой группы из трех опор относительно снимаемой группы из трех опор. Во время относительного перемещения групп опор, установка одних опор и снятие других происходит последовательно, причем выбор последовательности происходит "естественным" образом. Для компенсации возможных нефункциональных смещений в вертикальной плоскости при смене групп опор здесь также можно использовать реакцию следящей системы СЗМ, контроль по электрическому току, контроль по отклонению упругой микроконсоли или контроль по датчику нагрузки (см. ниже).
Рассмотрим теперь случай, когда одна группа из трех опор является статической. Группа статических опор без движителей (группа пассивных опор), так же как это было описано выше для робота-нанопозиционера с пятью опорами, является в данном случае вспомогательной. Для того чтобы выступы на конце каждой статической опоры точно вошли в соответствующие им по форме и размерам углубления несущей поверхности, требуется провести сканирование, распознавание и анализ рельефа несущей поверхности в окрестности мест установки пассивных опор. Сканирование выполняется перемещением группы пассивных опор относительно несущей поверхности либо посредством синхронной работы X, Y-движителей 4 активных опор, либо посредством общих для групп опор X, Y-движителей 8.
Во время сканирования места установки текущей статической опоры взаимодействия несущей поверхности с зондами двух других статических опор не происходит благодаря соответствующему наклону робота-нанопозиционера Z-движителями активных опор. В рассматриваемом варианте исполнения позиционера решение задачи поиска подходящих по форме и размерам мест для установки статических опор является еще более сложным, так как необходимо найти одновременно три места на несущей поверхности, расположенных на фиксированных расстояниях друг от друга, соответствующих фиксированным расстояниям между статическими опорами. Таким образом, данная разновидность позиционера может быть проще всего реализована при использовании точечного контакта на ПГУ; применением несущей поверхности, где уже имеется система ямок, расстояния между которыми соответствуют расстояниям между выступами пассивных опор; либо образования нужного контакта в ходе перемещения путем пластической деформации несущей поверхности твердым кончиком выступа опоры (см. подробности ниже).
Совмещение в латеральной плоскости трех подходящих углублений на несущей поверхности с тремя выступами статических опор производится активными опорами путем синхронного смещения робота-нанопозиционера в латеральной плоскости X, Y-движителями 4 опор и/или X, Y-движителями 8 групп опор. Помимо смещения возможен поворот робота-нанопозиционера в латеральной плоскости на небольшой угол. Поворот в латеральной плоскости выполняется латеральным смещением либо двух активных опор вокруг позиции третьей активной опоры, либо смещением трех активных опор вокруг общего центра [15, 16]. Поскольку при повороте в месте контакта происходит вращение выступа опоры, то для исключения возможных механических перенапряжений в области контакта здесь не следует использовать выступ в форме пирамиды/тетраэдра, помещаемый в пирамидальную/тетраэдральную ямку. Наилучшим решением в данном случае будет точечный контакт на ПГУ или контакт по линии/поверхности между выступом опоры, имеющим круговую симметрию, и имеющей круговую симметрию ямкой.
Поиск места на несущей поверхности для установки опор активной группы осуществляется так же, как это было описано выше для других разновидностей робота-нанопозиционера. После окончания перемещения робот-нанопозиционер следует оставлять покоящимся на пассивных опорах (опорах без движителей), поскольку долговременная стабильность этих опор выше. Высокая долговременная стабильность пассивных опор достигается использованием материала, термодеформация которого при колебаниях температуры значительно меньше термодеформации материалов соединительных элементов и движителей активных опор. Кроме того, у пассивных опор в принципе отсутствуют такие факторы нестабильности, как ползучесть и дрейф питающих напряжений [18].
Рассмотрим разновидность робота-нанопозиционера с шестью опорами, у которого одна группа из трех опор повернута относительно другой группы из трех опор на некоторый минимальный угол (данный угол определяется латеральным размером опоры, см. Фиг.5, 6, 7) или на нулевой угол (малый равносторонний треугольник, образованный одной тройкой опор, вложен в большой равносторонний треугольник, образованный другой тройкой опор; стороны треугольников - параллельны; см. Фиг.8). Существенное преимущество такого расположения опор заключается в том, что робот-нанопозиционер во время смены опоры никогда не оказывается вблизи границы устойчивости и, следовательно, связанная с этой границей неопределенность при смене опор полностью отсутствует. Смена опор производится последовательно в каждой паре, пара образуется из двух ближайших друг к другу опор. Для данного расположения групп опор относительно друг друга всегда известно, какая из опор "принимающей" группы будет задействована при снятии опоры "отдающей" группы. Такой опорой будет опора, ближайшая к сменяемой (другая опора пары), тогда как в конфигурации треугольников, развернутых относительно друг друга на 60°, ситуация при смене первой опоры всегда неоднозначная.
Еще одним существенным преимуществом данной конструкции является то, что опоры, принадлежащие разным группам, вместе со своими движителями располагаются рядом друг с другом, кроме того, по соседству располагаются и области на несущей поверхности, где происходит "передача" контакта. В результате парные элементы робота-нанопозиционера одинаково нагреваются/охлаждаются и поэтому претерпевают одинаковые термодеформации. В процессе выполнения шага между этими элементами не возникает относительного дрейфа (в этом смысле данная конструкция является термокомпенсированной), что позволяет определять дрейф установленной опоры по дрейфу свободной опоры, а также облегчает передачу контакта в условиях постоянно изменяющейся температуры окружающей среды. Другое преимущество рассматриваемой конструкции состоит в том, что в ней площадь пересечения треугольников, образованных группами опор, больше, и, следовательно, данная конструкция в конфигурации "опорами вверх" будет иметь больший диапазон перемещений, хотя и не одинаковый в разных направлениях.
Конструкция, в которой группы опор повернуты относительно друг друга на небольшой угол (Фиг. 5, 6, 7), является более предпочтительной, чем конструкция, в которой группы опор повернуты на нулевой угол (одна группа опор вложена в другую, см. Фиг. 8). Дело в том, что в такой конструкции обе группы опор не только расположены рядом, но и имеют "лучи" одинаковые по длине, т.е. группы опор полностью одинаковы. Кроме того, при использовании прямоугольных лучей робота-нанопозиционера в качестве движителей опоры в паре перемещаются независимо. Запас устойчивости данного позиционера также в среднем больше и этот запас одинаков в обеих группах опор.
Хотя на Фиг. 7 изображения опор-движителей 4, принадлежащих разным группам, отличаются размерами, но это отличие достаточно условное. Отличие введено главным образом для того, чтобы упростить чертеж. На практике, например, путем изгиба лучей 1.3 верхней группы опор в направлении к несущей поверхности 6, а лучей 1.1 нижней группы опор - в направлении от несущей поверхности 6, участки лучей, на которых расположены опоры-движители 4, можно расположить в одной плоскости, в результате чего опоры-движители 4 в обеих группах можно сделать одинаковых размеров. Таким образом, все динамические процессы, включая тепловые, будут развиваться в этих группах практически одинаково.
На заключительном этапе выполнения шага, после того как опоры робота-нанопозиционера установлены на несущую поверхность, производится перемещение платформы позиционера посредством одновременной работы X, Y-движителей установленных опор. Движители установленных опор позиционера перемещают платформу в выбранном латеральном направлении на заданную величину. Из-за неполной идентичности опор и их X, Y-движителей, а также из-за отличий в образованных контактах, у опор при отработке данного перемещения неизбежно будут возникать небольшие различия в направлении и в величине перемещения.
Указанные различия способны породить механические напряжения в местах контакта, релаксация которых может вызвать случайные подвижки опор. Таким образом, погрешность робота-нанопозиционера, во-первых, будет тем больше, чем больше будет шаг его перемещения; во-вторых, эта погрешность будет возникать, начиная с определенного шага, т.е. при малом шаге она будет отсутствовать. Пороговый характер проявления погрешности определяется величиной силы трения покоя, возникающей при механических напряжениях в местах контакта. В данном изобретении сила трения покоя, во-первых, стабилизируется точной установкой выступа опоры в углубление несущей поверхности, во-вторых, она может быть заметно увеличена за счет использования более глубоких ямок (имеющихся среди прочих на несущей поверхности или предварительно изготовленных на ней). Таким образом, чем больше сила трения покоя, тем больше тот шаг, при котором не происходит описанной случайной подвижки опор.
Снять указанные напряжения можно с помощью простой процедуры переустановки установленных опор (достаточно переустановить две из трех опор). Переустановка заключается в отрыве установленной опоры от несущей поверхности и временной установке вместо нее соответствующей свободной опоры, сканировании оторванной опорой окрестности своего прежнего места установки, распознавании полученного рельефа, обнаружения прежнего места установки и установки оторванной опоры на это место (при временной установке свободной опоры также производится сканирование, распознавание и анализ места установки этой опоры на несущей поверхности). Снять напряжения в контактах также можно путем смены опор - установки свободных опор вместо задействованных. В последнем случае число установок опор на одну меньше - три вместо четырех. Отметим, что погрешности, вызываемые указанными выше напряжениями в местах контакта, принципиально отсутствуют у робота-нанопозиционера, группы опор которого перемещаются относительно друг друга, используя общие X, Y, Z-движители 8 (Фиг.4, 6 и 7).
Правило базирования на плоскости по трем точкам справедливо только для позиционеров, опоры которых имеют фиксированную высоту (пассивные опоры). Если же опоры позиционера являются активными, т.е. способны, изменяя высоту, подстраивать ее под фактическое расстояние до несущей поверхности, после чего принимать на себя часть веса позиционера, то число одновременно установленных опор может быть больше чем 3. Для того чтобы опора была способна принять на себя часть веса робота-нанопозиционера, она должна иметь датчик, показывающий текущую величину нагрузки. Частично данная функция реализуется наблюдением за изменением тока проводимости или изгибом упругой микроконсоли (см. описанный выше способ управление передачей контакта, минимизирующий паразитное смещение в вертикальной плоскости), однако для ее полной реализации опоры робота-нанопозиционера должны быть снабжены специальными датчиками нагрузки.
Таким образом, при наличии у опор собственных движителей и датчиков нагрузки во втором способе перемещения число одновременно установленных опор может быть любым. В процессе передвижения последовательно каждая из опор переносится в новое место на несущей поверхности. После того как все опоры переместились, образовав контакты с несущей поверхностью, посредством одновременной работы X, Y-движителей опор производится перемещение робота-нанопозиционера с образцом/зондом в новое место относительно положения зонда/образца.
Большое число одновременно установленных адаптивных опор, с одной стороны, делает конструкцию более сложной, но с другой, - более устойчивой и более жесткой. Позиционер с более жесткой конструкцией имеет более высокую резонансную частоту, благодаря чему он становится менее чувствительным к внешним низкочастотным сейсмическим и акустическим возмущениям, а также обладает большим быстродействием [5, 14, 15, 16]. Более высокое быстродействие не только повышает производительность позиционера, но и делает позиционер менее чувствительным к термодрейфу [14], скорость которого, как правило, незначительная [13].
При большом количестве опор вес робота-нанопозиционера перераспределяется по большему числу контактов, что позволяет снизить давление выступа опоры на несущую поверхность. В результате может быть увеличена грузоподъемность робота-нанопозиционера (увеличен максимальный вес перемещаемого объекта) и/или уменьшена площадь контакта. Кроме того, наблюдая по датчику нагрузки устанавливаемой опоры за увеличением нагрузки на устанавливаемую опоры, по датчику нагрузки снимаемой опоры за уменьшением нагрузки на снимаемую опору и по датчикам нагрузки установленных опор за изменением нагрузки на эти опоры, возможно, так управлять процессом передачи контакта, что паразитное смещение шагающего робота-нанопозиционера в вертикальной плоскости будет сведено к нулю.
Чтобы повысить термостабильность предлагаемого робота-нанопозиционера (снизить чувствительность к колебаниям температуры), можно применить термокомпенсированную конструкцию опор-движителей. Термокомпенсация опор-движителей заключается в том, что опора-движитель собирается из двух одинаковых частей (движителей), включенных встречно. Во время работы смещение одного из движителей производят посредством сжатия на некоторую величину, а смещение другого посредством растяжения на такую же величину. При встречном включении величины смещений движителей суммируются, а их термодеформации вычитаются, в результате чего термостабильность робота-нанопозиционера повышается.
В процессе эксплуатации шагающего робота-нанопозиционера происходит нагрев/охлаждение отдельных узлов и устройства в целом, причем нагрев происходит не только от внешних источников, но и от внутренних, например, от используемых X, Y', Z-движителей. Не все элементы робота-нанопозиционера могут быть изготовлены из материалов с малым коэффициентом теплового расширения (КТР), поэтому при изменении температуры неизбежно происходит изменение линейных размеров робота-нанопозиционера (термодеформация). Кроме того, если в роботе-нанопозиционере используются пьезокерамические X, Y, Z-движители опор, то после каждого их применения будет возникать последействие - медленное движение опор, называемое ползучестью (крипом). Ползучесть тем больше, чем больше производимое перемещение. Ползучесть действует в направлении перемещения с медленно убывающей скоростью в течение нескольких минут. Таким образом, термодеформация и ползучесть вызывают дрейф образца/зонда относительно зонда/образца, что при использовании робота-нанопозиционера, например, в СЗМ приводит к заметным искажениям получаемых изображений.
Существенное влияние на стабильность позиционирования оказывают такие термодеформации устройства и несущей поверхности, а также такая ползучесть X, Y-движителей, в результате действия которых расстояния между выступами установленных опор и расстояния между соответствующими этим выступам ямками на несущей поверхности становятся неодинаковыми. Различия в указанных расстояниях приводят к механическим напряжениям в местах контактов, которые при релаксации (проскальзывании) вызывают неуправляемые подвижки робота-нанопозиционера в латеральной и вертикальной плоскостях.
Устранить напряжения в местах контактов, возникающие при тепловой деформации, можно путем изготовления основы несущей поверхности из того же материала, что и тело робота-нанопозиционера. Как было показано выше, "лучи" робота-нанопозиционера вместе с центральной деталью, к которой они крепятся, могут быть изготовлены из пьезокерамических материалов с целью их использования в качестве X, Y, Z-пьезодвижителей опор. В этом случае тело робота-нанопозиционера будет главным образом состоять из пьезокерамического материала.
Изготовление основы несущей поверхности из такого же пьезокерамического материала, что и сам робот-нанопозиционер, приведет к тому, что любое изменение температуры в какой-либо части позиционера вызовет приблизительно одинаковую по величине и по направлению термодеформацию и в теле позиционера, и в основе несущей поверхности. В результате расстояния между установленными опорами и соответствующие расстояния между местами установки этих опор на несущей поверхности будут все время равны друг другу, и, следовательно, механические напряжения в местах контактов опор с несущей поверхностью не возникнут. Для достижения максимального эффекта, основу несущей поверхности можно сделать переменной толщины (переменного профиля) так, чтобы результат ее термодеформации в латеральной плоскости был бы максимально приближен к термодеформации тела робота-нанопозиционера.
Другой способ, с помощью которого устраняется негативное влияние латерального дрейфа (термодрейф + ползучесть) и вызываемые этим дрейфом опасные латеральные напряжения в контактах, состоит в проведении периодической смены групп опор или периодической переустановке опор группы (достаточно переустановить две из трех задействованных опор). Данный способ реализуется довольно просто по причине того, что термодрейф и ползучесть - процессы достаточно медленные [12, 13, 24, 25, 26]. Смена/переустановка опор производятся через определенный промежуток времени, зависящий от скорости латерального дрейфа. Чем медленнее латеральный дрейф, тем реже производится смена/переустановка опор. Данный режим работы шагающего робота-нанопозиционера соответствует "ходьбе" на месте. Фактически, в этом режиме каждая опора позиционера следует в латеральной плоскости за своей медленно движущейся ямкой (местом установки), поддерживая таким образом расстояния между опорами и расстояния между соответствующими этим опорам ямками одинаковыми. Необходимо подчеркнуть, что в отличие от предыдущего способа описанный здесь способ и способ, который будет описан ниже, позволяют устранить дрейф, вызванный не только термодеформацией, но и ползучестью.
Другой способ, с помощью которого можно устранить негативное влияние латерального дрейфа (термодрейф + ползучесть) и избежать вызываемых этим дрейфом опасных перенапряжений в контактах, заключается в том, чтобы определять х, у-компоненты дрейфа установленных опор робота-нанопозиционера, и с учетом полученных значений в реальном масштабе времени вносить соответствующие корректирующие смещения в положения этих опор посредством их X, Y-движителей. Иными словами, не разрывая контакта с несущей поверхностью, перемещать установленные опоры посредством их собственных X, Y-движителей вслед за дрейфующими ямками - местами установки этих опор.
Компоненты дрейфа по х, у определяются в данном способе с помощью незадействованных (свободных) опор робота-нанопозиционера путем периодического сканирования X, Y, Z-движителями этих опор небольших областей несущей поверхности и слежения за распознанными в этих областях особенностями поверхности [12, 13, 24]. В связи с тем, что во время выполнения шага любое перемещение робота-нанопозиционера по х, у, z имеет встречную составляющую (X, Y, Z-движители отрывают опору от несущей поверхности, совершают перемещение в некотором заданном направлении, устанавливают опору на несущую поверхность, переносят тело позиционера в новую позицию), то данный тип позиционера принципиально возбуждает очень малую результирующую ползучесть. Малая результирующая ползучесть объясняется тем, что ползучесть, вызванная передвижением опоры в каком-то направлении, компенсируется направленной ей на встречу ползучестью, вызванной передвижением этой опоры на такое же расстояние и с той же скоростью, но в противоположенном направлении (см. работы [25, 26, 24, 13]).
Приведенный способ определения дрейфа установленных опор робота-нанопозиционера лучше всего применять на позиционерах, у которых сменяющие друг друга опоры расположены на минимальном расстоянии друг от друга и имеют одинаковую форму, размеры, изготовлены из одних и тех же материалов и т.п. (см. Фиг. 5-7), поскольку в этом случае определяемые поправки будут наиболее точно соответствовать фактическим различиям позиций установленных опор и позиций ямок, в которые они установлены.
Поскольку помимо смещения опоры в новую позицию X, Y, Z-пьезодвижители опор выполняют еще и растровое сканирование, то во время этого сканирования также будет возбуждаться некоторая ползучесть. Однако по величине эта ползучесть существенно меньше ползучести, вызванной смещением опоры, так как: размеры сканируемой окрестности, как правило, меньше шага робота-нанопозиционера; при растровом сканировании перемещения по строкам имеют встречную составляющую; для компенсации ползучести, возникающей при перемещении от строки к строке, сразу после окончания прямого скана выполняется встречный ему скан [25, 26].
Чтобы вызвать такую же ползучесть в свободной опоре, какая имела место в установленной опоре в ходе растрового сканирования, необходимо выполнить растровое сканирование X, Y, Z-движителями свободной опоры, используя те же параметры скана (ориентацию строк, размер шага сканирования, количество точек в скане, скорость сканирования и т.п.), что и при поиске места контакта для установленной опоры. Кроме того, имея одну или две пары изображений, полученных при встречном сканировании, можно, используя способ, описанный в работах [25, 26], определить действующий во время растрового сканирования термодрейф и суммарную остаточную ползучесть, возбуждаемую в ходе смещения и растрового сканирования. Располагая полученной информацией, в положение опоры может быть внесена соответствующая поправка. Таким образом, если поправка определена для устанавливаемой опоры, то она позволяет точно установить эту опору в выбранную ямку несущей поверхности; если поправка определена для свободной опоры, то она позволяет точно определить текущее положение свободной опоры.
Устранение напряжений в контактах установленных опор описанным выше способом может потребовать периодической переустановки (сброса) системы коррекции. Дело в том, что через некоторое время в системе коррекции может накопиться ошибка. Ошибка возникает из-за небольших отличий в размерах, в материале, во взаимном расположении, в питающих напряжениях, в калибровках и т.п. движителей опор, образующих пару. Накопленная ошибка может в определенный момент превысить критическое значение, что приведет к релаксации напряжения в контакте. Для переустановки системы достаточно просто выполнить смену опор робота-нанопозиционера - установленные в данный момент опоры заменить на соответствующие им свободные.
Сканирование несущей поверхности свободными опорами с целью определения термодрейфа и ползучести установленных опор следует выполнять таким образом, чтобы вызываемые этим процессом вибрации не приводили к колебаниям шагающего робота-нанопозиционера. Для этого следует задавать небольшие скорости сканирования; при приближении к крайним точкам растра замедлять движение; расположить X, Y-движители опор относительно друг друга и синхронизировать их работу таким образом, чтобы возникающие при перемещении этих движителей колебания взаимно гасили друг друга.
Чем при некоторой фиксированной силе трения покоя в контактах более жестким будет шагающий робот-нанопозиционер, тем после возникновения механических напряжений в контактах раньше произойдет проскальзывание опор. Для того чтобы определить вызванные термодеформацией и ползучестью смещения установленных опор, требуется некоторое время (время затрачивается на сканирование области несущей поверхности свободными опорами, распознавание и анализ полученного рельефа, изменение текущего положения опоры и т.п.), в течение которого не должно происходить никаких проскальзываний. Такая реакция опор достигается введением в конструкцию робота-нанопозиционера упругого элемента, который по мере роста напряжения способен некоторое время претерпевать упругую деформацию (необходимой упругостью может обладать конструкция робота-нанопозиционера в целом). Проскальзывание в этом случае происходит только после того, как сила, возникающая в упругом элементе, превысит силу трения покоя. В качестве упругого элемента можно использовать выступ опоры. С этой целью для заданного материала выступа следует подобрать определенные высоту и диаметр основания выступа.
Таким образом, определяя с помощью трех свободных опор вызванные дрейфом (термодрейф + ползучесть) латеральные смещения соответствующих установленных опор, коррекция положения установленных опор производится посредством X, Y-движителей установленных опор. В результате устраняются латеральные дрейфы опор робота-нанопозиционера относительно несущей поверхности и вызываемые этими дрейфами механические напряжения в контактах. Кроме того, информация об обнаруженном дрейфе (скорость и направление) может передаваться в сканирующий зондовый микроскоп и использоваться для исправления искаженных дрейфом изображений рельефа изучаемой поверхности.
В случае, когда для измерения рельефа несущей поверхности в месте установки опоры используется упругая микроконсоль с зондом на свободном конце (подробное описание конструкции узла приводится ниже), можно применить следующий способ определения латерального дрейфа установленных опор. После установки опоры на несущую поверхность упругая микроконсоль, упираясь зондом в несущую поверхность, изгибается. При наличии у установленной опоры составляющей дрейфа, направленной в латеральной плоскости вдоль упругой микроконсоли, микроконсоль испытывает деформацию изгиба, что может быть измерено. При наличии у установленной опоры составляющей дрейфа, направленной в латеральной плоскости поперек упругой микроконсоли, микроконсоль испытывает винтовую (торсионную) деформацию, которую также можно измерить соответствующими средствами. Таким образом, подавая команды на X, Y-движители установленной опоры, добиваются такого изгиба и закрученности ее микроконсоли, которые были зафиксированы системами, измеряющими деформации микроконсоли, сразу после установки данной опоры на несущую поверхность. На практике описанный вид компенсации дрейфа может быть осуществлен посредством использования двух автоматических следящих систем, одна из которых поддерживает постоянный изгиб микроконсоли, а другая - постоянную закрученность микроконсоли.
Покажем теперь, как можно обнаружить и скомпенсировать термодрейф шагающего робота-нанопозиционера в вертикальной плоскости. При выполнении свободными опорами описанного выше сканирования участков несущей поверхности, вертикальные следящие системы поддерживают между зондом свободной опоры и несущей поверхностью небольшой постоянный ток (режим СТМ, величина тока порядка наноампера [20, 21]) или небольшую постоянную силу взаимодействия (режим АСМ, обычно используется сила отталкивания, величина силы порядка наноньютона [20, 21, 22, 23]). Согласно конструкции робота-нанопозиционера, приведенной на Фиг. 7, между установленной опорой 1 (см. Фиг. 9) и расположенной рядом с ней свободной опорой 1' не происходит вызванного тепловой деформацией относительного вертикального перемещения. Следовательно, следящая система свободной опоры 1' не будет регистрировать вертикального термодрейфа соответствующей ей установленной опоры 1. Однако следящая система свободной опоры 1' в состоянии регистрировать вертикальный термодрейф двух других установленных опор 2 и 3, находящихся на достаточном удалении от нее. Аналогично свободная опора 2' будет регистрировать вертикальный термодрейф установленных опор 1 и 3, а свободная опора 3' - установленных опор 1 и 2.
Вертикальный термодрейф установленной опоры 1 вызывает вращение робота-нанопозиционера вокруг оси 2-3, вертикальный термодрейф установленной опоры 2 вызывает вращение робота-нанопозиционера вокруг оси 1-3, вертикальный термодрейф установленной опоры 3 вызывает вращение робота-нанопозиционера вокруг оси 1-2. Принимая во внимание сказанное, можно записать следующую линейную систему уравнений:

где Δz1', Δz2', Δz3' - измеряемые следящими системами вертикальные перемещения свободных опор 1', 2' и 3', соответственно; l1, l2 - плечи свободной опоры к осям вращения; l - плечо установленной опоры к оси вращения; Δz1', Δz2', Δz3' - искомые вызываемые термодрейфом вертикальные перемещения установленных опор.
Для робота-нанопозиционера, изображенного на Фиг.9, плечо l выражается через расстояние между опорами L следующим образом 
где l1≠l2. Корректирующие поправки вводятся путем смещения установленных опор 1, 2, 3 на величину -Δz1, -Δz2, -Δz3, соответственно, при помощи Z-движителей этих опор.
Предложенный способ регистрации вертикального термодрейфа в состоянии обнаружить вертикальный термодрейф установленных опор 2 и/или 3 относительно установленной опоры 1, опор 1 и/или 3 относительно опоры 2 и опор 1 и/или 2 относительно опоры 3. Однако данный способ не в состоянии "почувствовать" вызванного термодрейфом одновременного смещения в вертикальной плоскости на одну и ту же величину всех трех установленных опор (в этом случае вращение отсутствует, и, следовательно, регистрируемые величины Δz1'=Δz2'=Δz3'=0, тогда согласно (2) Δz1=Δz2=Δz3=0). Указанная разновидность вертикального термодрейфа возникает тогда, когда изменяется температура всего робота-нанопозиционера, например, из-за равномерного нагрева/охлаждения помещения или измерительной камеры, где установлен прибор. Данную разновидность термодрейфа можно компенсировать, поместив между группами опор элемент 9 (см. Фиг. 4, 6, 7), изготовленный из материала с отрицательным КТР.
Следует отметить, что при использовании описанных выше способов компенсации латерального и вертикального дрейфов снимаемые опоры не отводятся далеко от несущей поверхности. Отвод снимаемой опоры производится только до момента, пока опора не перестанет удерживать на себе положенную ей часть веса робота-нанопозиционера. При этом зонд упругой микроконсоли остается в контакте с несущей поверхностью, что требуется для последующего сканирования несущей поверхности (возникающие в контакте силы ничтожно малы по сравнению с весом робота-нанопозиционера). Выступ снимаемой опоры еще может находиться в контакте с несущей поверхностью, а ее вертикальная автоматическая система управления уже будет активизирована. Система управления выполнит окончательный отрыв выступа опоры от несущей поверхности, доведет величину зазора между кончиком этого выступа и несущей поверхностью до заданного значения, после чего будет поддерживать это значение постоянным (посредством поддержания постоянной силы, изгибающей упругую микроконсоль).
Отрыв от поверхности может быть сделан очень плавным, если плавно изменять значение регулируемой величины [27] - изгиб упругой микроконсоли (изгиб определяет силу прижатия зонда микроконсоли к несущей поверхности и одновременно величину зазора между выступом опоры и несущей поверхностью). При таком способе характерная величина зазора между выступом снятой опоры и несущей поверхностью будет составлять несколько нанометров. Таким образом, ввиду очень малых вертикальных перемещений и наличия встречной составляющей при снятии/установке опоры, в роботе-нанопозиционере возбуждается настолько незначительная вертикальная ползучесть, что ею в большинстве рассматриваемых приложений можно пренебречь.
В целом конструкция шагающего робота-нанопозиционера и способ его передвижения позволяют, используя совокупность предложенных способов компенсации (пассивных, активных, программных, аппаратных, конструктивных и материальных), сохранять высокую точность позиционирования как в случае равномерного, так и неравномерного изменения температуры в помещении (измерительной камере). В первом случае происходит равномерный нагрев/охлаждение всего робота-нанопозиционера, во втором случае в теле робота-нанопозиционера могут возникать резкие тепловые градиенты.
Нелинейность X, Y-движителей опор не является критическим параметром для шагающих позиционеров, поскольку последние производят перемещения шагами фиксированного размера. Другими словами, на результат перемещения не влияет то, по какому пути, фактически, движется опора из точки начала шага в точку окончания шага, главное, чтобы размер шага - расстояние между начальной и конечной точками перемещения, можно было бы выдерживать точно. Для достижения малой погрешности перемещения чрезвычайно важно, чтобы у шагающего позиционера отсутствовало рысканье - случайное изменение направления движения. В предложенном шагающем роботе-нанопозиционере рысканье отсутствует принципиально, поскольку устранены его причины - проскальзывание опор в местах контактов с несущей поверхностью.
Для обеспечения высокой точности перемещения на заданную величину шага X, Y-движители опор калибруются. В простейшем виде калибровка представляет собой сканирование X, Y, Z-движителями опоры дифракционной решетки, например, TDG01 (НТ-МДТ, Россия) или двумерной калибровочной структуры, периоды которых известны с высокой точностью. Для проведения калибровки робот-нанопозиционер непосредственно устанавливается на калибровочную структуру, выполняющую в данном случае роль несущей поверхности. Из сказанного следует еще один вариант исполнения шагающего робота-нанопозиционера, в котором робот-нанопозиционер использует несущую поверхность в виде двумерной периодической структуры из канавок, ямок и т.п. образований, расстояния между которыми выдержаны с высокой точностью. Двигаясь по такой двумерной периодической структуре, робот-нанопозиционер просто подсчитывает количество пройденных периодов и таким образом всегда точно знает, на какое расстояние он переместился.
Чтобы упростить СТМ, уменьшить его массу и геометрические размеры (тем самым уменьшить величину термодеформации и увеличить быстродействие) из конструкции инерционного позиционера [14] была исключена перемещаемая платформа (вместе с несущей поверхностью) и держатель образца. Исследуемый под микроскопом образец, который в подобных устройствах устанавливался на перемещаемой платформе, теперь был установлен непосредственно на опоры позиционера. Недостатком данного решения является то, что инерционный позиционер в этом случае в состоянии перемещать стабильно с малым шагом только такие образцы, поверхности которых имеют малую шероховатость, например шлифованные или полированные пластины кремния [14].
Существенным преимуществом шагающего робота-нанопозиционера, предлагаемого в настоящем изобретении, является то, что на него в отличие от известного инерционного позиционера [14] можно устанавливать образцы с рельефом любой шероховатости. Подобная универсальность достигается за счет того, что, во-первых, робот-нанопозиционер является реально шагающим устройством, т.е. во время шагания полностью отрывает опору от поверхности и, следовательно, никак не взаимодействует с поверхностью в процессе перемещения опоры; во-вторых, робот-нанопозиционер контролируемым образом устанавливает свои опоры только в те места на поверхности образца, где имеется углубление по форме и размерам в наибольшей степени соответствующее известным форме и размерам выступа на кончике опоры.
Последнее свойство реализовано благодаря наличию у рассматриваемого в настоящем изобретении робота-нанопозиционера разновидности технического зрения. Способность "видеть" несущую поверхность, в данном случае поверхность перемещаемого образца, достигнута через измерение топографии небольшого участка поверхности, куда предстоит на текущем шаге робота-нанопозиционера установить опору, и последующего распознавания и анализа полученного рельефа с помощью компьютера. Причем робот-нанопозиционер способен работать полностью автономно, принимая в реальном масштабе времени самостоятельные решения относительно того, в какое именно место на шероховатой поверхности следует установить опору так, чтобы она стояла на этом месте заведомо устойчиво (неподвижно).
Таким образом, шагающему роботу-нанопозиционеру практически безразлично то, насколько гладкой является поверхность образца. Более того, чем больше ее шероховатость, тем при работе робота-нанопозиционера в наклонном положении выше сила трения покоя в образованных контактах и, следовательно, выше стабильность его положения. Учитывая указанные свойства и возможности позиционера, становится понятным, почему описываемый в настоящем изобретении позиционер назван роботом-нанопозиционером. Приставка нано в названии устройства указывает не на физический размер позиционера, а на точность, с которой он в состоянии осуществлять перемещение в пространстве.
Кроме описанного выше способа непосредственной установки перемещаемого образца/подложки на опоры робота-нанопозиционера в конфигурации "опорами вверх", также возможно, устанавливать данный позиционер непосредственно на поверхность образца/подложки. Непосредственная установка робота-нанопозиционера на поверхность образца/подложки позволяет в конфигурации "опорами вниз" выполнять перемещение данного устройства по образцу/подложке больших размеров. Таким образом, по образцу/подложке больших размеров можно перемещать закрепленный на шагающем роботе-нанопозиционере зонд, микро/нанодатчики, микро/наноинструменты и т.п. Описанный способ непосредственной установки робота-нанопозиционера на образец/подложку требуется в тех случаях, когда необходимо провести измерения/воздействия на поверхности образца/подложки больших размеров, когда образец/подложку невозможно или нежелательно разбирать, раскалывать, разъединять и т.п. на более мелкие части. Следует отметить, что между передвижением шагающих опор в конфигурации "опорами вниз" и в конфигурации "опорами вверх" нет принципиальной разницы.
Благодаря тому, что опоры шагающего робота-нанопозиционера могут двигаться независимо в любом направлении, позиционер кроме точных линейных перемещений способен точно поворачивать перемещаемый объект в латеральной плоскости. Точный поворот образца в латеральной плоскости необходим при проведении целого ряда измерений. Например, часто требуется точно ориентировать измеряемый объект - дифракционную решетку, поверхностную упорядоченную структуру, кристалл, подложку и т.п. относительно координатных осей сканера микроскопа или другого прибора.
Благодаря встроенной разновидности технического зрения предлагаемый робот-нанопозиционер в состоянии различать, переступать или обходить микро/нанонеровности, дефекты, микро/наночастицы (загрязнения) несущей поверхности. Таким образом, в данном позиционере исключаются микроподвижки и проскальзывание опор; озиционера, вызываемые дефектами и загрязнениями поверхности, благодаря чему снижается чувствительность позиционера к условиям эксплуатации и уменьшаются затраты на его обслуживание.
Способность робота-нанопозиционера перемещать опору в вертикальной плоскости можно дополнительно использовать для аппаратного устранения среднего наклона исследуемого под микроскопом рельефа поверхности. Аппаратное устранение среднего наклона позволяет уменьшить величину искажения, вносимого зондом микроскопа во время сканирования, поскольку в этом случае боковая поверхность зонда в меньшей степени взаимодействует с рельефом измеряемой поверхности. Кроме того, аппаратное устранение среднего наклона приводит к росту производительности сканирования, поскольку от Z-манипулятора сканера и системы грубого подвода в этом случае не требуется выполнять перемещения, направленные на преодоление этого среднего наклона.
Поскольку после выполнения перемещения относительные координаты, форма и размеры топографических особенностей, использованных для установки опор шагающего робота-нанопозиционера, известны, то имеется возможность, запомнив маршрут движения, вернуться в исходное место на поверхности, а также воспроизвести данный маршрут нужное число раз. Причем повторное перемещение может быть выполнено с большей скоростью и по более оптимальной траектории, поскольку расположение подходящих углублений и имеющихся дефектов несущей поверхности к этому моменту уже известны. Наличие подобного рода априорной информации позволяет уменьшить размеры сканируемых окрестностей в области предполагаемой установки опоры, что также ведет к увеличению скорости передвижения. Таким образом, маршрут перемещения робота-нанопозиционера можно многократно, точно и быстро воспроизвести, что существенно упрощает проведение на поверхности образца/подложки последовательностей измерительных и/или технологических операций.
Ниже приводятся существенные признаки, отличающие устройство и способ передвижения предлагаемого шагающего робота-нанопозиционера от устройства и способа передвижения его прототипа [1]:
1. Значительно уменьшена область контакта опоры с несущей поверхностью, кончику опоры в области контакта (выступу) приданы определенная форма (пирамиды, тетраэдра, конуса, полусферы, параболоида и т.п.) и определенные размеры; в некоторых исполнениях робота-нанопозиционера на несущей поверхности заранее изготовлены паттерны с углублениями определенной формы и определенных размеров, которые предназначены для образования ответной части контакта; в некоторых исполнениях робота-нанопозиционера на начальном этапе процесса эксплуатации на несущей поверхности, изготовленной из достаточно пластичного материала, формируются ответные отпечатки выступа, изготовленного из твердого материала, которые далее используются в качестве мест установки опор робота-нанопозиционера. Опоры робота-нанопозиционера устанавливаются на несущую поверхность неслучайным, а контролируемым образом - только в те места, где они в наибольшей степени совместимы по форме и размерам с рельефом несущей поверхности. Технический результат заключается в устранении погрешностей позиционирования, связанных со случайным возникновением неустойчивых контактов между опорой и несущей поверхностью. Замена электростатических фиксаторов опор на описанные выше выступы опор позволяет за счет существенного уменьшения площади контакта точно определять и контролировать место контакта; пропускать электрический ток между опорой и несущей поверхностью; в конфигурации "опорами вниз" перемещать робот-нанопозиционер по образцу больших размеров путем непосредственной установки позиционера на поверхность образца, а в конфигурации "опорами вверх" перемещать образец путем его непосредственной установки на опоры; исключить неуправляемые подвижки робота-нанопозиционера в моменты фиксации/освобождения опор; избежать затягивания электрическим полем в место контакта и удержания там частиц пыли.
2. Увеличено количество опор робота-нанопозиционера, в каждую опору встроены ее собственные X, Y, Z-движители, в некоторых исполнениях устройства предусмотрен узел для смещения центра тяжести шагающего робота-нанопозиционера. Указанные конструктивные изменения позволили в процессе передвижения полностью отрывать опору робота-нанопозиционера от несущей поверхности и переносить ее в новое место без какого-либо механического контакта с несущей поверхностью. Фактически, из процесса передвижения опоры исключено трение опоры о несущую поверхность, поэтому принципиально отсутствует неуправляемая подвижка опоры, возникающая в момент начала движения. Технический результат состоит в получении малого по величине надежно воспроизводимого перемещения; устранении погрешностей, вызываемых неконтролируемым взаимодействием опоры с несущей поверхностью во время перемещения и начала движения; уменьшении износа опоры и несущей поверхности, связанных с трением; исключении в месте контакта опоры с несущей поверхностью связанного с трением нагрева и, следовательно, термодрейфа, вызываемого этим нагревом.
3. В опоры робота-нанопозиционера встроен зонд; имеется система регистрации, предназначенная для сканирования рельефа несущей поверхности; используется компьютер, который распознает и анализирует отсканированную область несущей поверхности и выдает соответствующие команды управления X, Y, Z-движителям опор. С помощью указанных средств в автоматическом режиме производится сканирование несущей поверхности в окрестности предполагаемого места установки опоры, распознавание особенностей рельефа несущей поверхности на полученном скане, выбор наилучшего места (углубления) установки опоры, образование устойчивого контакта путем точного совмещение выступа устанавливаемой опоры с обнаруженным углублением. В случае отсутствия на несущей поверхности в окрестности предполагаемого места установки опоры среди распознанных особенностей углубления подходящей формы и размеров используется ПГУ, либо место установки смещается, и/или увеличивается окрестность сканирования, после чего сканирование окрестности, ее распознавание и анализ выполняются заново. В зависимости от исполнения зонд, которым осуществляется сканирование несущей поверхности, при установке опоры на несущую поверхность либо входит в контакт с несущей поверхностью; либо оказывается в такой яме (поре), что его кончик не касается поверхности; либо смещается (в одном из вариантов прячется в специальной нише), будучи подпружиненным микроконсолью. Технический результат состоит в устранении погрешностей позиционирования, связанных со случайным возникновением неустойчивых контактов между опорой и несущей поверхностью, а также в повышении устойчивости робота-нанопозиционера при работе в наклонном положении (за счет возможности выбора более глубоких ямок для установки опоры). Кроме того, технический результат состоит в возможности перемещения робота-нанопозиционера в конфигурации "опорами вниз" по образцу с любой шероховатостью путем непосредственной установки робота-нанопозиционера на поверхность образца, а также перемещения образца с любой шероховатостью путем его непосредственной установки на опоры в конфигурации "опорами вверх".
4. Использование в одном из вариантов исполнения проводящего выступа (зонда) опоры, проводящей несущей поверхности и туннельного тока, протекающего между ними, для измерения рельефа несущей поверхности. Технический результат состоит в исключении неустойчивых контактов между опорой и несущей поверхностью через возможность определения рельефа несущей поверхности в месте установки опоры. Кроме того, технический результат состоит в возможности минимизации нефункционального перемещения робота-нанопозиционера в вертикальной плоскости, возникающего в момент передачи контакта.
5. Применение в одном из вариантов исполнения расположенной на кончике опоры упругой микроконсоли с острым зондом в качестве средства измерения рельефа несущей поверхности. Технический результат заключается в исключении неустойчивых контактов между опорой и несущей поверхностью через возможность определения рельефа несущей поверхности в месте установки опоры. Кроме того, технический результат состоит в возможности минимизации нефункционального перемещения робота-нанопозиционера в вертикальной плоскости, возникающего в момент передачи контакта.
6. Термокомпенсированность конструкции робота-нанопозиционера (в одном из вариантов исполнения). Термокомпенсация достигается за счет того, что каждый X, Y, Z-движитель представляет собой два одинаковых движителя (движители имеют одинаковые размеры, изготовлены из одних и тех же материалов и т.п.), включенных встречно. Технический результат заключается в существенном уменьшении термодрейфа робота-нанопозиционера в латеральной и вертикальной плоскостях.
7. Термокомпенсация теплового дрейфа робота-нанопозиционера в вертикальной плоскости (в одном из вариантов исполнения). Термокомпенсация достигается путем установки между группами опор элемента, изготовленного из материала с отрицательным коэффициентом теплового расширения. Технический результат состоит в существенном уменьшении термодрейфа робота-нанопозиционера в вертикальной плоскости.
8. Способность обнаруживать собственный дрейф (термодрейф + ползучесть) по х, у, z относительно несущей поверхности и компенсировать его путем соответствующего смещения в пространстве установленных опор. Дрейф обнаруживается в ходе привязки зондов свободных опор робота-нанопозиционэра к особенностям несущей поверхности. Дрейф установленной опоры также обнаруживается по изменению изгиба и закручивания ее упругой микроконсоли. Подавая управляющие команды на X, Y-движители установленной опоры, добиваются такого изгиба и закрученности микроконсоли, которые были зафиксированы измерительными системами сразу после установки данной опоры на несущую поверхность. Технический результат состоит в исключении дрейфа робота-нанопозиционера и вызываемых эти дрейфом механических напряжений в местах контактов выступов опор с несущей поверхностью (релаксация механических напряжений приводит к неуправляемым подвижкам в латеральной и вертикальной плоскостях). Снятие механических напряжений в контактах также может осуществляться путем циклической смены/переустановки опор робота-нанопозиционера (фактически, при этом происходит слежение зондом каждой опоры за дрейфующим местом установки данной опоры).
9. Использование материалов с малыми коэффициентами теплового расширения. Элементы конструкции шагающего робота-нанопозиционера изготовлены из материалов с малыми коэффициентами теплового расширения. Технический результат заключается в уменьшении термодрейфа робота-нанопозиционера в латеральной и вертикальной плоскостях при изменении температуры.
10. Изготовление основы несущей поверхности из материала, тепловой коэффициент расширения которого равен или близок к тепловому коэффициенту расширения тела робота-нанопозиционера. Для достижения одинаковой латеральной термодеформации тела робота-нанопозиционера и несущей поверхности основа последней изготавливается определенной толщины или определенного профиля. В одном из вариантов исполнения основа несущей поверхности изготовлена из того же материала, что и основное тело робота-нанопозиционера. Технический результат заключается в существенном уменьшении латерального термодрейфа робота-нанопозиционера относительно несущей поверхности и, следовательно, уменьшении вызванных этим дрейфом механических напряжений в контактах (релаксация механических напряжений приводит к неуправляемым подвижкам в латеральной и вертикальной плоскостях).
11. Использование поверхности образца в качестве несущей поверхности. В конфигурации "опорами вниз" использование поверхности образца в качестве несущей поверхности позволяет с малой погрешностью перемещать измерительный зонд, микро/наноинструменты и т.п. объекты относительно поверхности образца, не разрушая, не разрезая и не разбирая сам образец. Технический результат заключается в упрощении конструкции устройства и в возможности прецизионного позиционирования на поверхности крупных и тяжелых объектов. Технический результат при использовании поверхности образца в качестве несущей поверхности в конфигурации "опорами вверх" состоит в упрощении конструкции устройства, увеличении точности позиционирования за счет возможности уменьшения области контакта, прецизионном перемещении образцов более тяжелых, чем в конфигурации "опорами вниз".
12. Использование двумерной периодической (калибровочной) структуры, период которой известен с высокой точностью в качестве несущей поверхности. Технический результат состоит в возможности точного определения размера выполненного шага и пройденного роботом-нанопозиционером расстояния путем простого подсчета периодов структуры во время передвижения.
13. Использование реакции следящей системы сканирующего зондового микроскопа в процессе передвижения робота-нанопозиционера. Наблюдение за реакцией следящей системы СЗМ позволяет в зависимости от величины и направления вертикального смещения производимого устанавливаемой и снимаемой опорами (группами опор) так управлять процессом шагания, чтобы свести к нулю паразитное (нефункциональное) смещение шагающего робота-нанопозиционера в вертикальной плоскости.
14. Применение встроенных в опоры робота-нанопозиционера датчиков нагрузки. Датчики нагрузки, показывающие насколько сильно нагружена та или иная опора робота-нанопозиционера, позволяют одновременно устанавливать на несущую поверхность более трех опор. Технический результат заключается в возможности увеличения грузоподъемности робота-нанопозиционера и/или уменьшения площади контакта за счет перераспределения (выравнивания) веса робота-нанопозиционера по большему числу контактов. Кроме того, наличие датчиков нагрузки позволяет исключить нефункциональное смещение робота-нанопозиционера в вертикальной плоскости в момент передачи контакта от снимаемой опоры к устанавливаемой.
15. Накопление в ходе перемещения необходимой информации, характеризующей с точки зрения достижения устойчивого позиционирования несущую поверхность вдоль трассы движения робота-нанопозиционера. Технический результат заключается в возможности многократного, точного и быстрого воспроизведения запомненного маршрута перемещения робота-нанопозиционера при проведении на поверхности образца/подложки последовательности измерительных и/или технологических операций.
На Фиг.1 схематично показан известный шагающий позиционер [1, 2], выбранный в качестве прототипа. На фигуре дан вид устройства сверху и спереди. Шагающий позиционер состоит из перемещаемой платформы-пьезодвижителя 1, держателя образца 2, перемещаемого объекта 3 (образец, зонд, подложка и т.п.), трех опор 4, электростатических фиксаторов опор 5 с изолированными подошвами, проводящей электрический ток гладкой несущей поверхности 6 и основания 7.
Фиг. 2 представлен шагающий робот-нанопозиционер с пятью опорами. На фигуре дан вид устройства сверху и спереди. Цифрой 4 обозначен узел, объединяющий в себе опору робота-нанопозиционера и ее X, Y, Z-движители. X, Y, Z-движители предназначены для перемещения опор в латеральной и вертикальной плоскостях. Вместо X, Y, Z-движителей опор или в дополнение к ним могут использоваться "лучи" звезды, изготовленные из совокупности биморфов или других подобных им движителей. Цифрой 5 обозначены выступы опор. Опоры, на которые устанавливается робот-нанопозиционер, образуют равнобедренные треугольники (показаны пунктирной линией), (а) Конфигурация позиционера "опорами вниз", (б) Конфигурация позиционера "опорами вверх". Цифрой 1.2 обозначена перемещаемая платформа, 2.2 - держатель образца, установленный на перемещаемой платформе. Позиционер крепится к основанию 7 через узел 2.1, являющийся держателем образца в конфигурации "опорами вниз". Образцы/подложки, латеральные размеры которых сравнимы с латеральными размерами перемещаемой платформы 1.2, могут устанавливаться вместо перемещаемой платформы непосредственно на выступы 5 опор 4. Пропорции некоторых элементов на фигуре не соблюдены.
На Фиг.3 показан шагающий робот-нанопозиционер с шестью опорами в конфигурации (а) "опорами вниз", (б) "опорами вверх". Опоры, на которые устанавливается робот-нанопозиционер, образуют равносторонние треугольники (показаны пунктирной линией). Шесть опор позиционера образуют две группы опор по три опоры в каждой группе. Группы опор повернуты друг относительно друга на угол 60°. Пропорции некоторых элементов на фигуре не соблюдены.
На Фиг.4 изображена разновидность шагающего робота-нанопозиционера, показанного на Фиг.3. Группы опор позиционера благодаря X, Y, Z-движителям 8 способны производить смещение относительно друг друга в латеральной и вертикальной плоскостях. Посредством X, Y, Z-движителей 8 позиционер может выполнять установку на поверхность одной группы опор вместо другой, перемещение в латеральной плоскости одной группы опор относительно другой группы опор, сканирование несущей поверхности свободной группой опор. Кроме того, устанавливая вместо или дополнительно к X, Y, Z-движителям 8 элемент 9, изготовленный из материала с отрицательным КТР, можно компенсировать термодрейф позиционера в вертикальной плоскости. Пропорции некоторых элементов на фиг.4 не соблюдены.
На Фиг.5 показана разновидность шагающего робота-нанопозиционера, группы опор которого расположены относительно друг друга таким образом, что из опор, принадлежащих разным группам, образуются пары, практически вплотную примыкающие друг к другу. Минимальное расстояние между опорами определяется размерами используемых опор-движителей 4. Благодаря близкому расположению опоры в паре претерпевают практически одинаковые термодеформации, а благодаря одинаковым размерам и ориентации лучей в парах возбуждаются одинаковые ползучести. Пропорции некоторых элементов на фиг.5 не соблюдены.
На Фиг.6 изображена разновидность шагающего робота-нанопозиционера, показанного на Фиг.5. Группы опор позиционера благодаря X, Y, Z-движителям 8 способны производить смещение относительно друг друга в латеральной и вертикальной плоскостях. Посредством X, Y, Z-движителей 8 позиционер может выполнять установку на поверхность одной группы опор вместо другой, перемещение в латеральной плоскости одной группы опор относительно другой группы опор, а также сканирование несущей поверхности свободной группой опор. Кроме того, устанавливая вместо или дополнительно к X, Y, Z-движителям 8 элемент 9, изготовленный из материала с отрицательным КТР, можно компенсировать термодрейф позиционера в вертикальной плоскости. Пропорции некоторых элементов на фиг.6 не соблюдены.
На Фиг.7 представлена еще одна разновидность шагающего робота-нанопозиционера, принадлежащие к разным группам опоры которого расположены на минимальном удалении друг от друга. Изображения опор-движителей 4, принадлежащих разным группам, отличаются размерами, но это отличие достаточно условное. Отличие введено, главным образом, для того, чтобы упростить чертеж. На практике, например, путем изгиба лучей 1.3 верхней группы опор в направлении к несущей поверхности, а лучей 1.1 нижней группы опор - в направлении от несущей поверхности, участки лучей, на которых расположены опоры-движители 4, можно расположить в одной плоскости, в результате чего опоры-движители 4 в обеих группах можно сделать одинаковых размеров. Приведенное здесь замечание также относится к фиг. 4 и 6. Узел 8 - это или X, Y-движители, или X, Y, Z-движители, обеспечивающие перемещение в пространстве групп опор относительно друг друга. Посредством X, Y, Z-движителей 8 позиционер может выполнять установку на поверхность одной группы опор вместо другой, перемещение в латеральной плоскости одной группы опор относительно другой группы опор, а также сканирование несущей поверхности свободной группой опор. Цифрой 9 обозначен компенсирующий вертикальную термодеформацию элемент, изготовленный из материала с отрицательным КТР. Пропорции некоторых элементов на фиг.7 не соблюдены.
На Фиг.8 показан шагающий робот-нанопозиционер, у которого одна группа опор в виде равностороннего треугольника вложена в другую группу опор в виде равностороннего треугольника (стороны треугольников параллельны, треугольники показаны пунктирными линиями). Пропорции некоторых элементов на фиг.8 не соблюдены.
Фиг.9 иллюстрирует работу активной системы компенсации вертикального термодрейфа. Цифрами 1, 2, 3 обозначены установленные опоры, цифрами 1', 2', 3' - свободные опоры. На фиг.9 изображен случай определения вертикального термодрейфа установленных опор 2 и/или 3 по вертикальному смещению свободной опоры 1' (для остальных опор подход аналогичен). Вертикальный термодрейф этих опор определяется по вертикальному смещению свободной опоры 1' в ходе слежения этой опорой за особенностью поверхности (холмом или ямкой) или местом (ямкой) ее предыдущей установки. Слежение осуществляется с помощью автоматической следящей системы в вертикальной плоскости, которая в зависимости от исполнения робота-нанопозиционера стремится поддерживать либо небольшой постоянный зазор между выступом опоры и несущей поверхностью (при регистрации туннельного тока), либо постоянную силу взаимодействия между зондом упругой микроконсоли и несущей поверхностью (при регистрации изгиба микроконсоли). В последнем варианте исполнения в результате слежения также происходит поддержание постоянного зазора между выступом свободной опоры и несущей поверхностью.
На Фиг. 10 представлены различные виды контактов выступа опоры с несущей поверхностью: (а) в точке, (б) по линии, (в), (г) по поверхности. На фиг.10 изображен выступ в форме конуса или пирамиды, выступ также может иметь форму тетраэдра, полусферы, параболоида вращения и т.п. Устройство контактов (б) и (г) позволяет избежать механического взаимодействия кончика выступа опоры с несущей поверхностью.
На Фиг. 11 показана конструкция выступа опоры, оборудованного упругой микроконсолью. На упругой микроконсоли 10, выполненной в виде рамки, расположен зонд 11. Изображенные выступ 5 и зонд 11 имеют форму пирамиды, но могут также иметь форму тетраэдра, конуса, полусферы, параболоида вращения и т.п. Пунктирной линией на виде спереди показано предельное положение микроконсоли-рамки 10 после ее изгиба в вертикальной плоскости. Ямка 12, предназначенная для установки опоры, обнаружена в ходе сканирования зондом 11 микроконсоли 10 несущей поверхности 6 и последующего компьютерного распознавания полученного рельефа. Штриховка основания пирамидального выступа 5 в сечении А-А не нанесена, чтобы не загромождать рисунок. Hа фигурах (б) и (г) микроконсоль-рамка 10 снабжена предохранительной коробкой 13, образующей потайную нишу. Потайная ниша защищает зонд 11 и микроконсоль 10 от разрушения при установке опоры в очень глубокую ямку (например, при перемещении робота-нанопозиционера непосредственно по образцу с грубым рельефом поверхности). На фигуре (в) изображена конструкция микроконсоли-рамки, состоящей из двух упругих рамок, одна из которых "выдвигается" из другой. На фигуре (д) показана конструкция микроконсоли-рамки 10, оборудованная дополнительной рамкой 14, предназначенной для отвода рамки 10 от несущей поверхности 6. Отвод реализуется применением биматериального эффекта. Перемычка 15, соединяющая упругую микроконсоль-рамку 10 с отводящей рамкой 14, сделана минимального сечения из материала с низкой теплопроводностью для минимизации передачи тепла от нагреваемой рамки 14 к рамке 10. Проводники, по которым протекает электрический ток, и нагревающий элемент рамки 14 на фиг.11 не показаны из соображений упрощения. Пропорции некоторых элементов на фигуре не соблюдены.
Ниже дается более детальное описание и рекомендации по изготовлению предлагаемого робота-нанопозиционера, приводятся примеры практической реализации отдельных узлов позиционера и способов управления, дополнительные доказательства осуществимости изобретения, указывается предпочтительное исполнение шагающего робота-нанопозиционера.
Для того чтобы принять решение по установке опоры в конкретное углубление несущей поверхности, требуется знание формы и размеров выступа на кончике опоры. Выступ на кончике опоры не только является тем местом, которое образует контакт, но и в ряде исполнений робота-нанопозиционера одновременно служит в качестве зонда, с помощью которого производится сканирование несущей поверхности (режим работы СТМ). Как правило, форма и размеры выступа на кончике опоры определяются применяемой технологией изготовления.
В зависимости от технологии и используемых материалов форма и размеры выступа будут варьироваться в большей или меньшей степени. Например, если речь идет о выступе, изготовленном электрохимическим травлением вольфрамовой (W) проволоки (получена путем проката/волочения, имеет поликристаллическую структуру), то его форма и размеры будут воспроизводиться от раза к разу хуже формы и размеров выступа из кремния (Si) или нитрида кремния (Si3N4), изготовленных анизотропным травлением, так как результат анизотропного травления кремния и нитрида кремния жестко определен их кристаллическим строением.
Форму и размеры выступа на кончике опоры можно оценить путем измерения на РЭМ. Кроме того, форму и размеры выступа можно определить путем сканирования X, Y, Z-движителями опоры специальных решеток, например, TGL01 или TGX01 (НТ-МДТ, Россия). Данные решетки предназначены для определения профиля кончика зонда СЗМ. Измерение основано на том факте, что профиль боковой поверхности зонда "прописывается" при сканировании объекта, стенки которого круче боковой поверхности зонда.
Чтобы обеспечить устойчивый контакт опоры робота-нанопозиционера с несущей поверхностью, следует использовать микро/наноструктурированные несущие поверхности, Микро/наноструктурированной несущей поверхностью называется поверхность, где предварительно изготовлены массивы рельефных элементов типа ямка, пора, борозда определенной формы и размеров, которые согласуются с формой и размерами используемых выступов опор. В настоящее время существует ряд технологий, позволяющих получать на поверхности подобные элементы.
В качестве примера можно привести микробороздки, получаемые в пластичных материалах после прокатки между валиками; микропоры в микроканальных пластинах (⌀5-100 мкм) [28], используемых в электронно-оптических преобразователях; микроотверстия (⌀200-500 мкм), изготовленные лазером [29]; матрицы из твердых микрочастиц (например, частиц диоксида кремния SiO2), как правило, сферической формы, осаждаемых из раствора на гладкую поверхность подложки [30, 31]; ямки в пленке золота [32]; поры в оксиде алюминия (Al2O3) [33, 34], поры в монокристаллическом кремнии (Si) [35] и в других материалах, получаемые методами электрохимического травления; пирамидальные ямки в монокристаллическом кремнии (Si); микро/наноимпринтинг - печать, осуществляемая путем механического вдавливания в пластичную поверхность твердой матрицы с микро/нанорельефными элементами [36]. Латеральные размеры получаемых ямок, характерные расстояния между соседними ямками, глубина ямок могут изменяться в широких пределах - от нескольких нанометров до нескольких сотен микрон в зависимости от используемой технологии, веса и размеров робота-нанопозиционера, решаемых позиционером задач.
Рассмотрим более подробно несущую поверхность, в которой имеются ямки с вертикальными стенками, причем глубина этих ямок в несколько раз больше их диаметра. Подобные ямки принято называть порами, а поверхность, в которой они изготовлены - пористой. Часто поры в поперечном сечении имеют круглую форму, что вместе с вертикальными стенками поры позволяет аппроксимировать такую пору цилиндром. Поры удобны тем, что при установке в них опоры робота-нанопозиционера кончик выступа не касается несущей поверхности (см. Фиг. 10б, г), а следовательно, не тупится, не деформируется, не изнашивается и не загрязняется. В таком случае кончик выступа можно использовать в качестве зонда при сканировании. Если после сканирования полученный профиль поры хорошо согласуется с известным профилем выступа опоры (см. способ определение профиля зонда, описанный выше), то данную пору можно считать пригодной для установки опоры. После установки конусообразной, полусферической или параболоидной опоры в цилиндрическую пору контакт с несущей поверхностью образуется по окружности.
В предлагаемом изобретении может быть реализовано нескольких видов контактов (см. Фиг. 10). Контакт в точке - конусообразный (полусферический, параболоидный, пирамидальный, тетраэдральный) выступ опоры на ПГУ (Фиг. 10а). Контакт по замкнутой линии - конусообразный (полусферический, параболоидный) выступ в цилиндрической поре (Фиг. 10б). Контакт по поверхности - конусообразный выступ в конусообразной яме/поре (Фиг. 10в, г), полусферический выступ в полусферической яме/поре, параболоидный выступ в параболоидной яме/поре, пирамидальный выступ в пирамидальной яме/поре (Фиг. 10в, г), тетраэдральный выступ в тетраэдральный яме/поре.
Контакт по линии в сравнении с контактом в точке позволяет увеличить допустимый вес образца и/или снизить давление опоры на несущую поверхность. Контакт по поверхности в сравнении с контактом по линии позволяет еще больше увеличить вес и/или еще больше снизить давление. Чем ниже давление, тем меньше деформация, износ и разрушение контактирующих поверхностей. Однако, чем больше площадь контакта, тем выше и его неопределенность (из-за несовершенства прилегающих поверхностей). Таким образом, следует искать компромисс между площадью контакта и давлением в контакте. Если, например, для заданной пары материалов зафиксировать максимальное давление, при котором еще не происходит разрушения контактирующих поверхностей, тогда можно определить минимальную площадь контакта.
Как было отмечено выше, чем больше площадь контакта, тем сложнее подобрать на некоторой произвольной несущей поверхности ответное место контакта так, чтобы оба тела - выступ и углубление максимально плотно прилегали друг к другу по заданной линии/поверхности. Чем лучше область прилегания двух тел соответствует заданной, тем более равномерно распределяется нагрузка в этой области и тем более устойчивым будет сам контакт. Таким образом, чтобы получить контакт по поверхности, обеспечивающий наибольшую устойчивость опоры, следует каким-то образом изготовить на несущей поверхности ямки, максимально точно соответствующие по форме и размерам выступу зонда.
Ранее говорилось о том, что наилучшая повторяемость формы и размеров наблюдается у выступов, изготовленных из кристаллических материалов. Как правило, такие выступы имеют форму пирамиды (или тетраэдра) с достаточно большим углом раскрытия при вершине. В качестве материалов выступов будем использовать материалы, имеющие высокую твердость, например алмаз, кремний, нитрид кремния, карбид кремния и т.п. Материал для несущей поверхности выберем, напротив, достаточно пластичный. В качестве такого материала можно использовать, например, золото (Au), платину (Pt), палладий (Pd) и т.п.
После установки опор робота-нанопозиционера на ПГУ несущей поверхности место контакта под действием веса позиционера будет пластически деформироваться. В результате на несущей поверхности образуется ответный отпечаток (см. Фиг. 10в, г), который в точности повторит пирамидальную форму выступа и таким образом обеспечит практически совершенный контакт по поверхности. Если для данной геометрии выступа, веса позиционера и веса образца перечисленные выше материалы несущей поверхности окажутся слишком пластичными, то можно использовать менее пластичные материалы, например сплавы платины с иридием (Ptlr), платины с родием (PtRh) и т.п.
Следует иметь в виду, что при возникновении отпечатка происходит нефункциональное смещение робота-нанопозиционера по координате z. Величина этого смещения зависит от угла раскрытия пирамидального выступа опоры, веса позиционера и пластичности несущей поверхности. Указанное нефункциональное смещение может быть скомпенсировано Z-движителем опоры, работающим по сигналу следящей системы СЗМ.
Другой способ компенсации, не требующий наличия СЗМ, состоит в том, что в начале работы создается пробный отпечаток выступа опоры, который затем сканируется X, Y, Z-движителями опоры с целью определения его глубины. Современные способы обработки поверхности и нанесения покрытий, используемые в микроэлектронике, позволяют добиваться высокой однородности свойств поверхности на больших площадях. Поэтому пластичная несущая поверхность будет обладать практически одинаковыми механическими свойствами во всех точках, что позволит получать отпечатки одинаковой глубины во всех точках несущей поверхности. Измерив глубину отпечатка, нефункциональное смещение робота-нанопозиционера по координате z может быть скомпенсировано соответствующим противосмещением, производимым Z-движителем опоры в момент установки выступа опоры на ПГУ.
Очевидно, что в процессе эксплуатации такого позиционера количество отпечатков будет возрастать. Если после сканирования окрестности места установки опоры в этой окрестности программой распознавания будет обнаружен готовый отпечаток, то опора будет установлена на место уже имеющегося отпечатка. Таким образом, спустя некоторое время после начала эксплуатации шагающего робота-нанопозиционера упомянутое выше нефункциональное смещение вдоль оси z будет исключено.
Чтобы сразу исключить нефункциональное смещение по z, на несущей поверхности следует изготовить множество углублений по форме и размерам, соответствующих получаемым механическим отпечаткам. В случае пирамидального (или тетраэдрального) кремниевого выступа опоры ответные пирамидальные (или тетраэдральные) ямки, геометрически полностью совместимые с выступом, можно изготовить на кремниевой пластине по той же технологии анизотропного травления, что и сам выступ. В данном процессе форма и размеры пирамидального (тетраэдрального) выступа-зонда и пирамидальной (тетраэдральной) ямки будут полностью соответствовать друг другу, поскольку и в том, и в другом случае они будут определяться анизотропией свойств кристалла кремния.
Если при сканировании опорами несущей поверхности используется принцип работы СТМ, то для обеспечения высокой проводимости на пирамидальный (или тетраэдральный) выступ и на поверхность с пирамидальными (тетраэдральными) ямками следует нанести тонкую пленку-металла Au, Pt, Pd и т.п. (для лучшей адгезии проводящей пленки можно использовать тонкий подслой хрома) либо легировать поверхности, например, фосфором (Р), мышьяком (As) или сурьмой (Sb) [37].
Выше был предложен вариант контакта по замкнутой линии (см. Фиг. 10б), возникающий при установке выступа-зонда опоры в пору, изготовленную на несущей поверхности. Основное преимущество данного контакта заключается в том, что после установки опоры удается избежать взаимодействия кончика зонда, которым производится сканирование с несущей поверхностью. Если теперь подобрать такие размеры выступа, форму выступа и материал поры (предполагается, что материал выступа значительно тверже материала несущей поверхности), чтобы для заданного веса робота-нанопозиционера после установки опоры происходила пластическая деформация области "горлышка" поры, то можно получить контакт по поверхности и одновременно избежать касания зондом несущей поверхности (см. Фиг. 10г). Чтобы исключить нефункциональное смещение в вертикальной плоскости, вызванное пластической деформацией горлышка поры, следует использовать такой же способ компенсации, что и для случая возникновения отпечатков на ПГУ, либо изначально изготовить поры с горлышком соответствующей формы и размеров.
Помимо проводящего электрический ток выступа-зонда на кончике опоры, позволяющего реализовать режим работы СТМ [20, 21], для определения микро/нанорельефа несущей поверхности можно использовать изготовленную методами микроэлектронной технологии [37] упругую микроконсоль-рамку 10 с острым зондом 11 на свободном конце (см. Фиг.11) наподобие той, что используется в качестве датчика силы (кантилевера, англ. cantilever) в АСМ [20, 21, 22, 23]. Далее для краткости микроконсоль-рамку будем называть просто микроконсолью.
Когда выступ опоры 5 установлен на несущую поверхность 6, упругая микроконсоль 10 упирается своим зондом 11 в несущую поверхность, изгибается под действием веса робота-нанопозиционера и ее свободный конец отклоняется вверх. Когда же выступ 5 опоры отрывается от несущей поверхности 6, упругая микроконсоль 10 разгибается и занимает рабочее положение, из которого может производить сканирование рельефа несущей поверхности. Для безопасного перемещения по очень грубым поверхностях следует предусмотреть расположенную на выступе 5 опоры миниатюрную нишу 13 (Фиг. 11б, г). При попадании выступа 5 опоры в глубокую яму упругая микроконсоль 10 будет скрыта в миниатюрной нише 13, что позволит предотвратить как разрушение зонда 11 микроконсоли, так и разрушение самой микроконсоли 10.
Сканирование рельефа несущей поверхности 6 зондом 11 упругой микроконсоли-рамки 10 выполняется с помощью X, Y, Z-движителей опоры. При движении зонда 11 вдоль поверхности 6 упругая микроконсоль 10 отклоняется, повторяя рельеф поверхности. Отклонения микроконсоли 10 фиксируются системой регистрации, которая с помощью механизма отрицательной обратной связи и Z-движителя опоры поддерживает постоянной силу взаимодействия зонда 11 микроконсоли 10 с несущей поверхностью 6.
Обычно в АСМ используется оптическая система регистрация изгиба упругой микроконсоли (кантилевера) [20, 21, 22, 23]. Проблема заключается в том, что оптическая регистрация, которая включает полупроводниковый лазер, микрообъектив и двухсекционный фотодиод, оказывается слишком громоздкой, отчего ее трудно встроить в предлагаемый миниатюрный шагающий робот-нанопозиционер. Вместо оптической системы регистрации величины изгиба упругой микроконсоли можно использовать другие способы регистрации. Например, можно применить способ, основанный на эффекте изменения сопротивления пьезорезистивного элемента, подвергнутого деформации. Указанный пьезорезистивный элемент представляет собой тонкую пьезорезистивную пленку, нанесенную на поверхность упругой микроконсоли [38, 39, 40, 41]. Помимо пьезорезистивной пленки, предназначенной для измерения изгиба микроконсоли, на поверхности микроконсоли можно предусмотреть пьезорезистивную пленку, предназначенную для измерения закручивания микроконсоли (как указывалось выше, информацию об изгибе и закручивании можно использовать для компенсации латерального дрейфа установленной опоры).
На Фиг.11 место контакта выступа 5 установленной опоры с несущей поверхностью 6 смещено в латеральной плоскости на некоторую величину Δх, Δу от места контакта с несущей поверхностью 6 зонда 11 упругой микроконсоли-рамки 10. При этом вертикальное положение микроконсоли-рамки 10 позволяет выполнить сканирование рельефа несущей поверхности. Указанное смещение может быть заложено в конструкцию изначально. Независимо от того было ли это смещение изначально заложено в конструкцию или нет, из-за погрешностей некоторое смещение обязательно будет возникать в процессе изготовления, сборки, монтажа, юстировки и т.п. действий. Незнание точных значений смещений Δх, Δу приводит к тому, что выступ 5 опоры при ее установке на несущую поверхность 6 просто не попадет в ямку 12, обнаруженную упругой микроконсолью 10 при сканировании-распознавании.
Для точного определения смещений Δх, Δу перед началом эксплуатации робота-нанопозиционера для каждой опоры производится следующее измерение. Вместо образца/зонда на позиционере закрепляется груз, веса которого достаточно, чтобы в местах контакта выступов опор с несущей поверхностью возникли небольшие отпечатки. Измеряемая опора посредством Z-движителя отрывается от несущей поверхности (вместо нее устанавливается другая опора) и отводится следящей системой на такое расстояние, при котором в ее упругой микроконсоли 10 возникает предварительно заданное усилие. Затем посредством X, Y, Z-движителей выполняется сканирование микроконсолью 10 рельефа несущей поверхности в окрестности места установки данной опоры. Величина сдвига отпечатка выступа опоры от центра скана даст искомое смещение Δх, Δу. Операции распознавания рельефа, обнаружения отпечатка и определения его сдвига выполняются компьютером в автоматическом режиме. Найденные смещения Δх, Δу далее учитываются программой управления робота-нанопозиционера при каждой установке данной опоры на несущую поверхность.
Помимо использования упругой микроконсоли-рамки в качестве силового датчика (режим работы АСМ [20, 21, 22, 23]), ее можно использовать в качестве датчика туннельного тока (режим работы СТМ [20, 21]). Для этого микроконсоль вместе с зондом покрывается тонкой пленкой проводящего материала, например, Au, Pt, Pd, карбида вольфрама (W2C), нитрида титана (TiN) и др. либо легируется, например, Р, As или Sb [37]. Использование упругой микроконсоли позволяет устанавливать выступ опоры на любую поверхность, тогда как в конструкции без микроконсоли проводящий выступ опоры желательно устанавливать на несущую поверхность с глубокими порами (см. Фиг. 10б, г).
Дело в том, что при установке опоры с упругой микроконсолью 10 на несущую поверхность, микроконсоль просто отгибается вверх (см. Фиг. 11), поэтому зонд 11 не тупится и не ломается. Тогда как установка проводящего выступа 5 в недостаточно глубокую ямку может затупить или повредить его кончик. Кроме того, микроконсоль 10 может утапливаться в нише 13 (см. Фиг. 11б, г), что обеспечивает сохранность самой микроконсоли и ее зонда 11 при установке опоры на поверхность с большой шероховатостью (например, при установке робота-нанопозиционера непосредственно на образец/подложку с очень грубым рельефом). При использовании ниши 13 микроконсоль 10 уже не достигает своего крайнего положения (не касается тыльной стороной плоской горизонтальной площадки опоры, на которой располагается выступ 5) и, следовательно, вес робота-нанопозиционера не прикладывается к зонду 11 микроконсоли. Вместо этого данный вес воспринимается прочной стенкой 13 потайной ниши.
Если микро/наноструктурированная несущая поверхность представляет собой диэлектрик, например является пористой поверхностью оксида алюминия [33, 34], то такая поверхность при ее сканировании проводящей микроконсолью 10 в режиме СТМ должна быть предварительно покрыта слоем проводящего материала (Au, Pt, Pd, W2C, TiN и др.).
На Фиг. 11 упругая микроконсоль-рамка 10 изображена в таком положении, в котором она готова выполнить сканирование окрестности места установки выступа 5 опоры. Покажем, за счет чего микроконсоль 10 выгибается и занимает указанное рабочее положение. Согласно технологии изготовления микрокантилеверов [20, 21], к которым относится и используемая в конструкции робота-нанопозиционера микроконсоль-рамка 10, исходной заготовкой служит плоская пластина (обычно кремниевая) небольшой толщины (доли мм). Таким образом, изначально микроконсоль-рамка 10 расположена в плоскости такой пластины, т.е. в нашем случае параллельно несущей поверхности. На первом этапе в том месте пластины, где будет изготовлен микрокантилевер, создается тонкая мембрана толщиной в несколько микрон, затем в тонкой мембране формируется контур микрокантилевера.
После формирования микрокантилевера в его теле могут возникать вызывающие изгиб механические напряжения. Одной из причин таких напряжений являются различия КТР материалов, из которых изготовлен микрокантилевер. Обычно микрокантилевер состоит из нескольких слоев различных материалов. Если КТР одного слоя заметно отличается от КТР другого слоя, то в плоскости микроконсоли возникает смещение одного слоя относительно другого. Поскольку слои сцеплены друг с другом (один слой нанесен на другой), то их относительное смещение вызывает изгиб кантилевера. Чтобы кантилеверы не изгибались, симметрично имеющимся слоям материалов вводятся дополнительные слои, компенсирующие изгиб (изгибающие кантилевер в противоположном направлении).
Для того чтобы микроконсоль 10 заняла то рабочее положение, которое показано на Фиг. 11, т.е. изогнулась бы в направлении к несущей поверхности, она должна состоять как минимум из двух материалов с различными КТР [42, 43]. Описываемый эффект называется биматериальным (англ. bimaterial) эффектом. Как правило, одним материалом является кремний (или нитрид кремния [42]; данные материалы приведены только как примеры), а другим материалом - нанесенная на кремний пленка золота соответствующей толщины [43] (золото приведено в качестве примера; для аналогичных целей могут быть применены и другие материалы [42]). КТР золота в несколько раз больше, чем КТР кремния, поэтому показанный на Фиг. 11 изгиб микроконсоли 10 возникает тогда, когда слой золота нанесен на ее верхнюю сторону. Как альтернативный вариант, наклонное по отношению к несущей поверхности положение микроконсоли 10 может быть получено закреплением/изготовлением на опоре узла микроконсоли под наклоном.
На практике для того чтобы снять или установить на робот-нанопозиционер образец/зонд, робот-нанопозиционер следует убрать с несущей поверхности. В противном случае, усилия, прикладываемые при снятии/установке образца/зонда, будут передаваться через выступы опор на несущую поверхность, что приведет к порче несущей поверхности и миниатюрных выступов опор. Для того чтобы избежать повреждения выступов опор извлеченного из прибора робота-нанопозиционера, робот-нанопозиционер следует поместить в специальный держатель. Держатель должен быть устроен таким образом, чтобы при установке в него робота-нанопозиционера выступы последнего ни с чем не контактировали.
Снятие робота-нанопозиционера с несущей поверхности или установка робота-нанопозиционера на несущую поверхность не происходят строго по нормали к несущей поверхности. Во время выполнения данных операций всегда будут возникать небольшие латеральные смещения. Латеральные смещения могут привести к поломке зонда 11 и/или упругой микроконсоли-рамки 10. Чтобы избежать этих поломок, перед снятием/установкой робота-нанопозиционера необходимо отводить микроконсоль 10 от поверхности на некоторое безопасное расстояние (например, прятать в нише).
Отвод микроконсоли-рамки 10 можно осуществить, используя тот же биматериальный эффект, который применялся для ее перевода из плоскости, параллельной несущей поверхности, в рабочее наклонное положение. В простейшем случае для отвода достаточно немного охладить микроконсоль 10, например, направив на нее поток воздуха от вентилятора. Однако данный способ подходит только для устройств, работающих на воздухе.
Для устройств, работающих в вакууме, следует на нижнюю сторону микроконсоли также нанести слой золота. Чтобы при комнатной температуре этот слой не компенсировал полностью изгиб, вызванный верхним слоем, его нужно сделать тоньше и/или покрыть им микроконсоль на меньшую длину. Теперь, для того чтобы отвести микроконсоль-рамку 10 от несущей поверхности, достаточно нагреть эту сторону микроконсоли, например, пропуская электрический ток через миниатюрный резистивный нагреватель (на Фиг.11 не показан) [43]. Миниатюрный резистивный нагреватель может быть изготовлен методами микротехнологии непосредственно на поверхности микроконсоли, например, из сплава нихром (Х20Н80).
Для того чтобы описанный механизм работал эффективно, следует между указанной парой биматериальных слоев ввести теплоизолирующий слой, препятствующий передаче тепла от нагреваемого током биматериального слоя к биматериальному слою без нагрева. Наиболее эффективно эта задача решается в конструкции, изображенной на Фиг. 11д. Здесь микроконсоль-рамка 10 и осуществляющая ее отвод микроконсоль-рамка 14 разнесены в пространстве. Слой золота нанесен на нижнюю сторону микроконсоли 14. Чтобы при комнатной температуре биматериальный слой микроконсоли 14 не компенсировал полностью изгиб, вызываемый биматериальный слоем микроконсоли 10, на микроконсоли 14 изготовлен слой золота более тонкий по толщине и меньший по длине. Проблема теплоизоляции в данной конструкции решается соединением микроконсолей-рамок 10 и 14 посредством тонкой малого сечения перемычки 15, изготовленной из материала с малой теплопроводностью (например, из нитрида кремния).
Таким образом, режим АСМ с датчиком в виде упругой микроконсоли в сравнении с режимом СТМ хотя и более сложен в исполнении, но является гораздо более универсальным, поскольку позволяет работать на любой поверхности - проводящей/непроводящей, гладкой/пористой. В частности, при перемещении робота-нанопозиционера непосредственно по поверхности большого объекта в конфигурации "опорами вниз" или при установке образца непосредственно на опоры робота-нанопозиционера в конфигурации "опорами вверх" проводимость поверхности, на которую устанавливаются опоры и наличие на этой поверхности ямок/пор с большим отношением глубины к диаметру, не играет роли.
В настоящем изобретении в качестве движителей опор могут использоваться пьезокерамические [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 14, 15, 44], электромагнитные [45], магнитострикционные [46, 47], электростатические [48], гидравлические [49] и др. типы движителей в миниатюрном [44] или в микромеханическом исполнении [44, 48]. Для устранения неопределенностей, вызываемых зазорами, подвижные узлы используемого движителя соединяются между собой и с корпусом робота-нанопозиционера посредством упругих (гибких) связей. По возможности корпус, подвижные узлы и упругие связи изготавливаются из цельной заготовки, материал которой обладает малым КТР.
Помимо пьезокерамического движителя в качестве перспективного движителя опоры стоит рассмотреть гидравлический движитель. Преимущества гидравлического движителя заключаются в большом диапазоне перемещения (десятки, сотни микрон) и больших развиваемых усилиях при малых габаритах и массе подвижной части [49]. При использовании гидравлического движителя наиболее громоздкий, тяжелый, испытывающий нагрев узел - насос, нагнетающий рабочую жидкость в камеру с упругой стенкой, может быть размещен вне подвижной части робота-нанопозиционера и соединен с ней посредством миниатюрных трубопроводов.
Требуемое смещение создается путем изменения давления рабочей жидкости в камере с упругой стенкой. Конструктивно камера с упругой стенкой может представлять собой резервуар с плоской или профилированной мембраной, подобие сильфона, трубку Бурдона (англ. Bourdon tube) и т.п. В случае использования миниатюрных гидравлических движителей [49] возможно изготовить компактный и легкий шагающий робот-нанопозиционер на нескольких опорах, каждая из которых обладает собственными X, Y, Z-движителями с диапазонами перемещения, достаточными для проведения локального сканирования несущей поверхности, отрыва опоры от несущей поверхности и переноса опоры в новую позицию на несущей поверхности.
Проанализировав предложенные выше варианты технических решений, можно дать описание предпочтительной (оптимальной) конструкции и предпочтительного (оптимального) способа передвижения шагающего робота-нанопозиционера. Предпочтительная конструкция включает две группы опор по три опоры в каждой группе. Три опоры в каждой группе образуют равносторонний треугольник. Три опоры одной группы повернуты относительно трех опор другой группы на минимальный угол (см. Фиг.7). Минимальный угол определяется латеральными габаритами опор. Между группами опор устанавливается термокомпенсирующий элемент с отрицательным КТР. Все используемые опоры имеют одинаковую конструкцию, одинаковые размеры, изготовлены из одних и тех же материалов по одной и той же технологии.
Ближайшие друг к другу опоры из каждой группы образуют пары. В любой момент времени робот-нанопозиционер покоится на трех опорах. В предпочтительном исполнении на опорах шагающего робота-нанопозиционера устанавливаются пирамидальные выступы, изготовленные из кремния. Измерение рельефа поверхности производится зондом упругой микроконсоли, расположенной вблизи кончика выступа опоры. Управление передачей контакта при снятии одной опоры пары и установке другой опоры пары выполняется по изменению отклонений их упругих микроконсолей. Робот-наноозиционер делается максимально универсальным - способным работать в конфигурации "опорами вниз", "опорами вверх", перемещаться как по специальной несущей поверхности, так и непосредственно по поверхности образца произвольной шероховатости. В качестве специальной несущей поверхности используется поверхность кремния, на которой предварительно по технологии анизотропного травления изготовлены пирамидальные углубления по форме и размерам совпадающие с пирамидальными выступами опор.
Установка опоры робота-нанопозиционера производится только в такую ямку несущей поверхности, форма и размеры которой наилучшим образом совместимы с формой и размерами контактной области выступа опоры. Данное место определяется в автоматическом режиме в ходе сканирования X, Y, Z-движителями устанавливаемой опоры участка несущей поверхности, распознавания и анализа полученного рельефа поверхности. По окончании последовательной смены опор в каждой паре перемещение тела робота-нанопозиционера в латеральной плоскости производится одновременной синхронной работой X, Y-движителей установленных опор. При выполнении шага снятая опора переносится в новое место несущей поверхности без какого-либо контакта с несущей поверхностью.
Использованные источники информации
[1] G. Binnig, H. Nievergelt, H. Rohrer, E. Weibel, Piezo-electric travelling support, U. S. Patent no. 4422002, December 20, 1983.
[2] С. Gerber, G. Binnig, H. Fuchs, O. Marti, H. Rohrer, Scanning tunneling microscope combined with a scanning electron microscope, Review of Scientific Instruments, vol.57, no. 2, pp.221-224, 1986.
[3] H.J. Mamin, D.W. Abraham, E. Ganz, J. Clarke, Two-dimensional, remote micropositioner for a scanning tunneling microscope, Review of Scientific Instruments, vol.56, no. 11, pp.2168-2170, 1985.
[4] В.L. Blackford, D.С. Dahn, M.H. Jericho, High stability bimorph scanning tunneling microscope, U.S. Patent no. 4894537, January 16, 1990.
[5] S. Gregory, С.Т. Rogers, High speed scanning tunneling microscope, U.S. Patent no. 4814622, March 21, 1989; S. Gregory, С.Т. Rogers, High-speed scanning tunneling microscopes, Journal of vacuum science and technology A, vol. 6, no. 2, pp.390-392, 1988.
[6] К. Takata, S. Hosoki, S. Hosaka, Т. Tajima, Scanning tunneling microscope with reliable coarse positioners, Review of Scientific Instruments, vol.60, no. 4, pp.789-791, 1989.
[7] A.D. Brisbane, Position control device, U.S. Patent no. 3377489, April 9, 1968.
[8] K.-W. С. Yang, Two-dimensional walker assembly for a scanning tunneling microscope, U. S. Patent no. 5214342, May 25, 1993.
[9] Y. Sakitani, Stepwise fine adjustment, U.S. Patent no. 3952215, April 20, 1976.
[10] G. Mariotto, M.D' Angelo, I.V. Shvets, Dynamic behavior of a piezowalker, inertial and fric-tional configurations, Review of Scientific Instruments, vol.70, no. 9, pp.3651-3655, 1999.
[11] Piozowalk drives: nanopositioning and picopositioning actuators with millimeter-travel, Physik instrumente catalog, Physik Instrumente GmbH & Co. KG, Germany (www.physikinstrumente.com).
[12] P.В. Лапшин. Способ перемещения зонда сканирующего микроскопа-нанолитографа в поле грубого X-Y позиционера, Патент РФ на изобретение №2181212, приоритет от 7 сентября 1999 (www.niifp.ru/staff/lapshin/index.htm#patents).
[13] R. V. Lapshin, Feature-oriented scanning methodology for probe microscopy and nanotechnology, Nanotechnology, vol.15, iss. 9, pp.1135-1151, 2004; R.V. Lapshin, Feature-oriented scanning probe microscopy, Encyclopedia of Nanoscience and Nanotechnology, edited by H.S. Nalwa, vol.14, pp.105-115, American Scientific Publishers, 2011 (www.niifp.ru/staff/lapshin/index.htm#articles).
[14] К. Besocke, An easily operable scanning tunneling microscope, Surface Science, vol.181, pp.145-153, 1987; R. Butz, H. Wagner, К. Besocke, Equipment of a 3-inch silicon molecular beam epitaxial system with scanning tunneling microscopy, Thin Solid Films, vol. 183, pp.339-344,1989.
[15] S. Behler, M.К. Rose, D.F. Ogletree, M. Salmeron, Method to characterize the vibrational response of a beetle type scanning tunneling microscope, Review of Scientific Instruments vol.68 no. 1, pp.124-128, 1997.
[16] M.J. Brukman, R.W. Carpick, Vibrations of the "beetle" scanning probe microscope: Identification of a new mode, generalized analysis, and characterization methodology, Review of Scientific Instruments, vol.77, no. 033706, 7 pp., 2006.
[17] J.В. Thaxter, Piezoelectric wafer mover, U.S. Patent no. 4195243, March 25, 1980.
[18] J.-Y. Shim, D.-G. Gweon, Piezo-driven metrological multiaxis nanopositioner, Review of Scientific Instruments, vol. 72, no. 11, pp.4183-4187, 2001.
[19] Z. Pang, J. Wang, Q. Lu, Fully low voltage and large area searching scanning tunneling microscope, Measurement Science and Technology, vol. 20, no. 065503, 5 pp., 2009.
[20] В.Л. Миронов. Основы сканирующей зондовой микроскопии. Учебное пособие для студентов старших курсов высших учебных заведений, 110 стр., Институт физики микроструктр, Российская академия наук, г. Нижний Новгород, 2004.
[21] R. Howland, L. Benatar, A practical guide to scanning probe microscopy, Park Scientific Instruments, 74 pp., 1996.
[22] D.Y. Abramovitch, S.B. Andersson, L.Y. Pao, G. Schitter, A tutorial on the mechanisms, dynamics, and control of atomic force microscopes, Proceedings of the 2007 American Control Conference, pp.1-15, New York, USA, July 11-13, 2007.
[23] Y. Seo, W. Jhe, Atomic force microscopy and spectroscopy, Reports on Progress in Physics, vol.71, no. 016101, 23 pp., 2008.
[24] P.В. Лапшин. Способ измерения рельефа поверхности сканирующим зондовым микроскопом. Патент РФ на изобретение №2175761, приоритет от 08 июня 1999 (www.niifp.ru/staff/lapshin/index.htm#patents).
[25] Р.В. Лапшин. Способ коррекции искаженных дрейфом изображений поверхности, полученных на сканирующем зондовом микроскопе. Патент РФ на изобретение №2326367, приоритет от 27 июля 2006 (www.niifp.ru/staff/lapshin/index.htm#patents).
[26] R.V. Lapshin, Automatic drift elimination in probe microscope images based on techniques of counter-scanning and topography feature recognition, Measurement Science and Technology, vol. 18, iss. 3, pp.907-927, 2007 (www.niifp.ru/staff/lapshin/index.htm#articles).
[27] R.V. Lapshin, 0.V. Obyedkov, Fast-acting piezoactuator and digital feedback loop for scanning tunneling microscopes, Review of Scientific Instruments, vol.64, no. 10, pp.2883-2887, 1993 (www.niifp.ru/staff/lapshin/index.htm#articles).
[28] J.L. Wiza, MicroChannel plate detectors, Nuclear Instruments and Methods, vol.162, pp.587-601, 1979.
[29] R. Seelaboyina, I. Lahiri, W. Choi, Carbon-nanotube-embedded novel three-dimensional alumina microchannel cold cathodes for high electron emission, Nanotechnology, vol.21, no. 145206, 7pp., 2010.
[30] Y. Xia, B. Gates, Y. Yin, Y. Lu, Monodispersed colloidal spheres: old materials v/ith new applications, Advanced Materials, vol.12, no. 10, pp.693-713, 2000.
[31] U. Gasser, Crystallization in three- and two-dimensional colloidal suspensions, Journal of Physics: Condensed Matter, vol. 21, no. 203101, 24 pp., 2009.
[32] M.J.К. Klein, M. Guillaumee, В. Wenger, L.A. Dunbar, J. Brugger, H. Heinzelmann, R. Pugin, Inexpensive and fast wafer-scale fabrication of nanohole arrays in thin gold films for plasmonics, Nanotechnology, vol.21, no. 205301, 7 pp., 2010.
[33] A.P. Li, F. Muller, A. Birner, K. Nielsch, U. Gösele, Hexagonal pore arrays with a 50-420 nm interpore distance formed by self-organization in anodic alumina, Journal of Applied Physics, vol.84, no. 11, pp.6023-6026, 1998.
[34] A. Govyadinov, I. Emeliantchik, A. Kurilin, Anodic aluminum oxide microchannel plates, Nuclear Instruments and Methods in Physics Research A, vol. 419, pp.667-675, 1998.
[35] P.С. Searson, J.M. Macaulay, The fabrication of porous silicon structures, Nanotechnology, vol.3, pp.188-191, 1992.
[36] Т. Balla, S.M. Spearing, A. Monk, An assessment of the process capabilities of nanoim-print lithography, Journal of Physics D: Applied Physics, vol.41, no. 174001, 10 pp., 2008.
[37] У. Тилл, Дж. Лаксон, Интегральные схемы: материалы, приборы, изготовление, 501 стр., перевод с английского, -М.: "Мир", 1985 (W.С. Till, J.Т. Luxon, Integrated circuits: materials, devices, and fabrication, Englewood Cliffs, NJ, USA, Prentice-Hall Inc., 1982).
[38] Т.С. Due, J.F. Creemer, P.J.F. Swart, P.M. Sarro, Piezoresistive cantilever for mechanical force sensors, Proceedings of the annual workshop on Semiconductor Advances for Future Electronics and Sensors, pp.143-146, November 17-18, Veldhoven, Netherlands, 2005.
[39] X. Yu, J. Thaysen, O. Hansen, A. Boisen, Optimization of sensitivity and noise in piezore-sistive cantilevers, Journal of Applied Physics, vol. 92, no. 10, pp.6296-6301, 2002.
[40] Y.-S. Kim, H.-J. Nam, S.-M. Cho, D.-C. Kim, J.-U. Bu, A self-actuating PZT cantilever integrated with piezoresistor sensor for AFM with high speed parallel operation, The Fifteenth IEEE International Conference on Micro Electro Mechanical Systems, pp.689-692, Las Vegas, NV, USA, 2002.
[41] Y. Jiang, T. Ono, M. Esashi, Temperature-dependent mechanical and electrical properties of boron-doped piezoresistive nanocantilevers, Journal of Micromechanics and Microengineer-ing, vol. 19, no. 065030, 5 pp., 2009.
[42] I-K. Lin, X. Zhang, Y. Zhang, Thermomechanical behavior and microstructural evolution of SiNx/Al bimaterial microcantilevers, Journal of Micromechanics and Microengineering, vol.19, no. 085010, 10pp., 2009.
[43] А.С. Hillier, A.J. Bard, AC-mode atomic force microscope imaging in air and solutions with a thermally driven bimetallic cantilever probe, Review of Scientific Instruments, vol. 68, no. 5, pp.2082-2090, 1997.
[44] M. Faizul, M. Sabri, Т. Ono, M. Esashi, Modeling and experimental validation of the performance of a silicon XY-microstage driven by PZT actuators, Journal of Micromechanics and Microengineering, vol. 19, no. 095004, 9 pp., 2009.
[45] В.W. Corb, M. Ringger, H.-J. Güntherodt, An electromagnetic microscopic positioning device for the scanning tunneling microscope, Journal of Applied Physics, vol.58, no. 11, pp.3947-3953, 1985; M. Ringger, B.W. Corb, H.-R. Hidber, R. Schlögl, R. Wiesendanger, A. Stemmer, L. Rosenthaler, A.J. Brunner, P.C. Oelhafen, H.-J. GQntherodt, STM activity at the University of Basel, IBM Journal of Research and Development, vol. 30, no. 5, pp.500-508, 1986.
[46] F. Claeyssen, N. Lhermet, R. Le Letty, P. Bouchilloux, Actuators, transducers and motors based on giant magnetostrictive materials, Journal of Alloys and Compounds, vol.258, pp.61-73, 1997.
[47] S.F. Tsodikov, V.I. Rakhovskii, Magnetostriction power actuators for superprecision positioning, Measurement Techniques, vol.40, no. 5, pp.485-494, 1997.
[48] J.К. Gimzewski, W.D. Pohl, Scanning tunneling microscope, U.S. Patent no. 4668865, May 26, 1987.
[49] M. De Voider, D. Reynaerts, Pneumatic and hydraulic microactuators: a review, Journal of Micronechanics and Microengineering, vol.20, no. 043001, 18 pp., 2010.
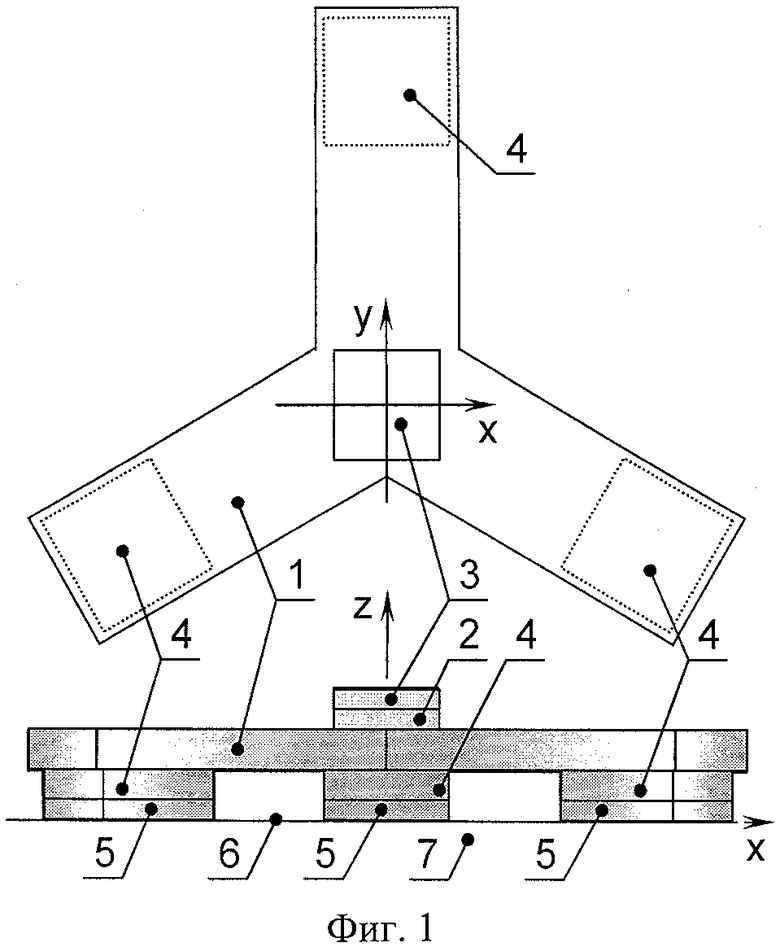
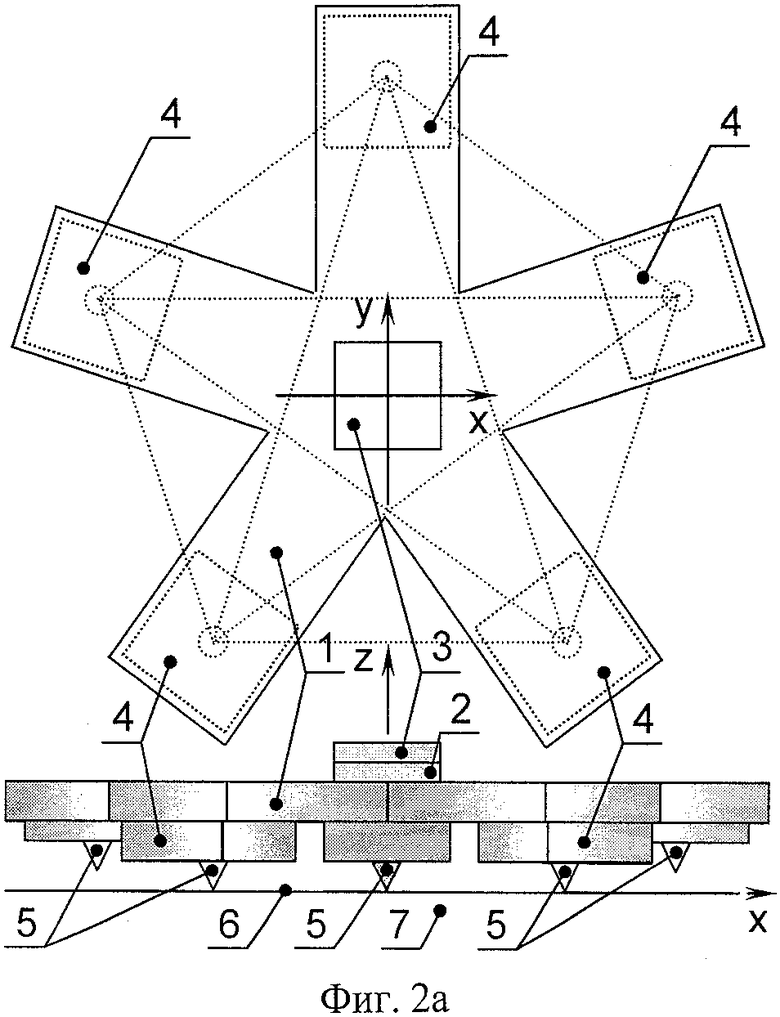
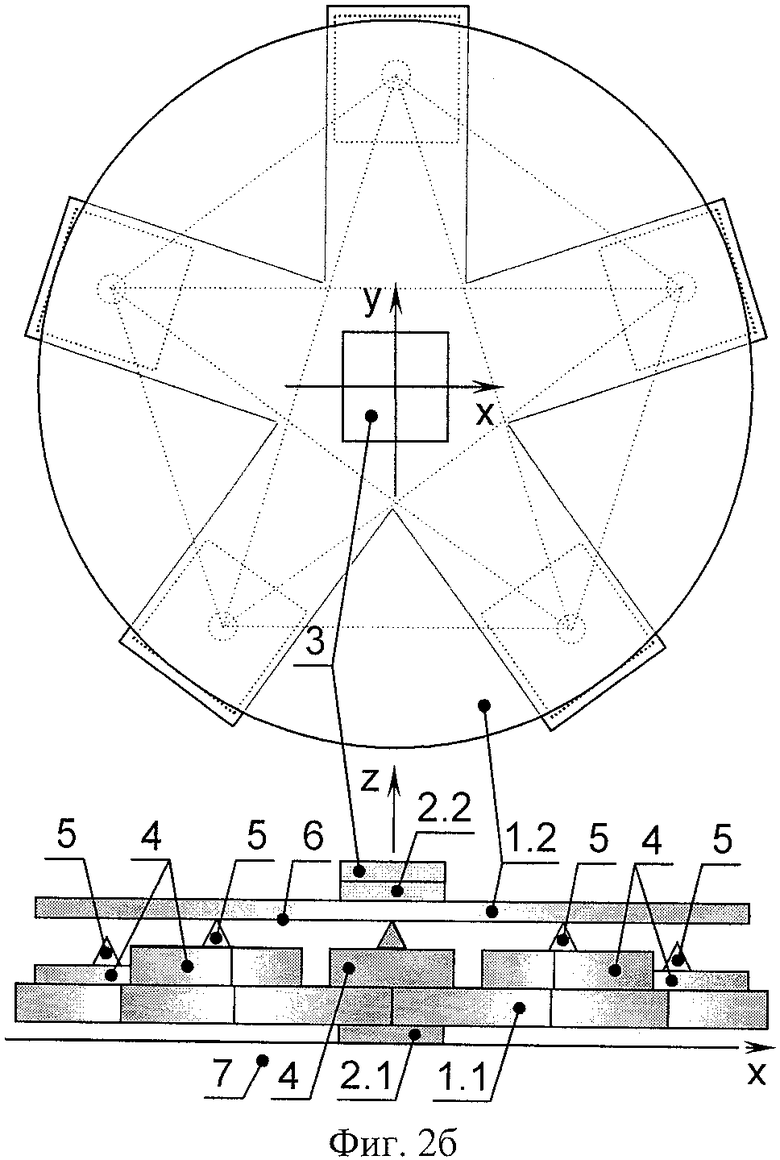
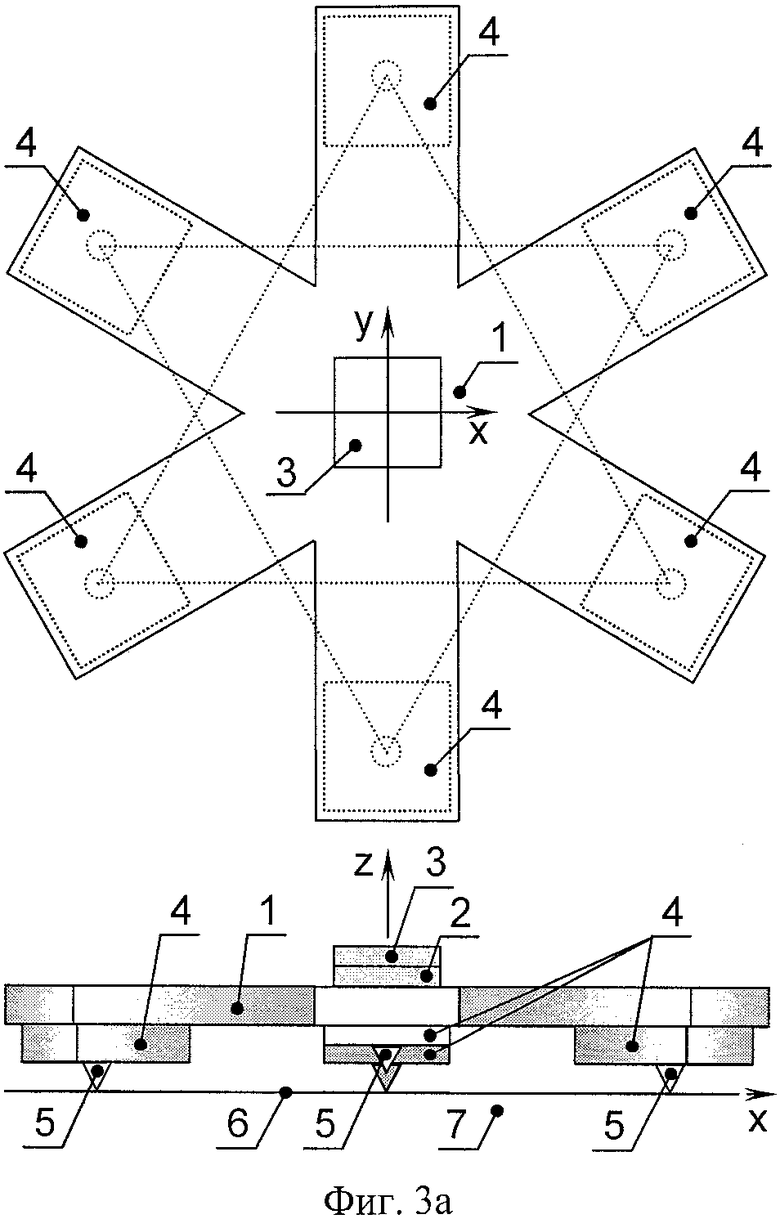
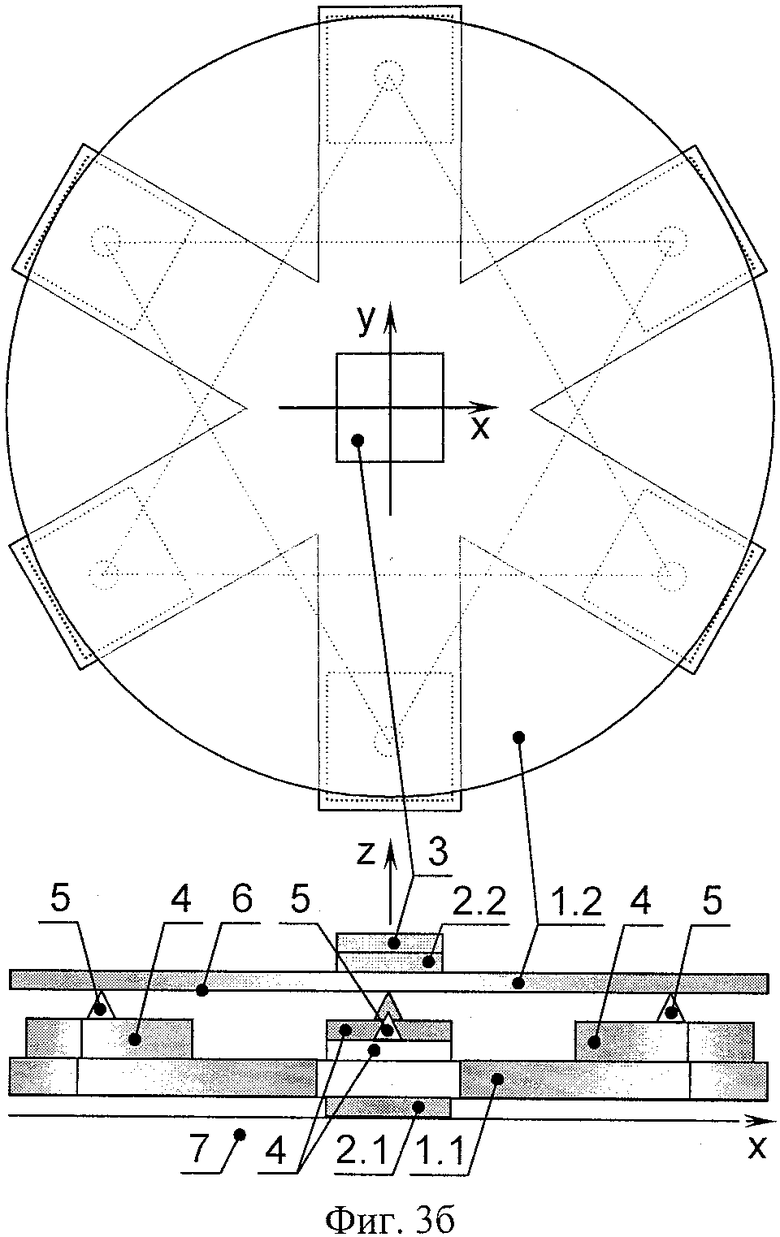
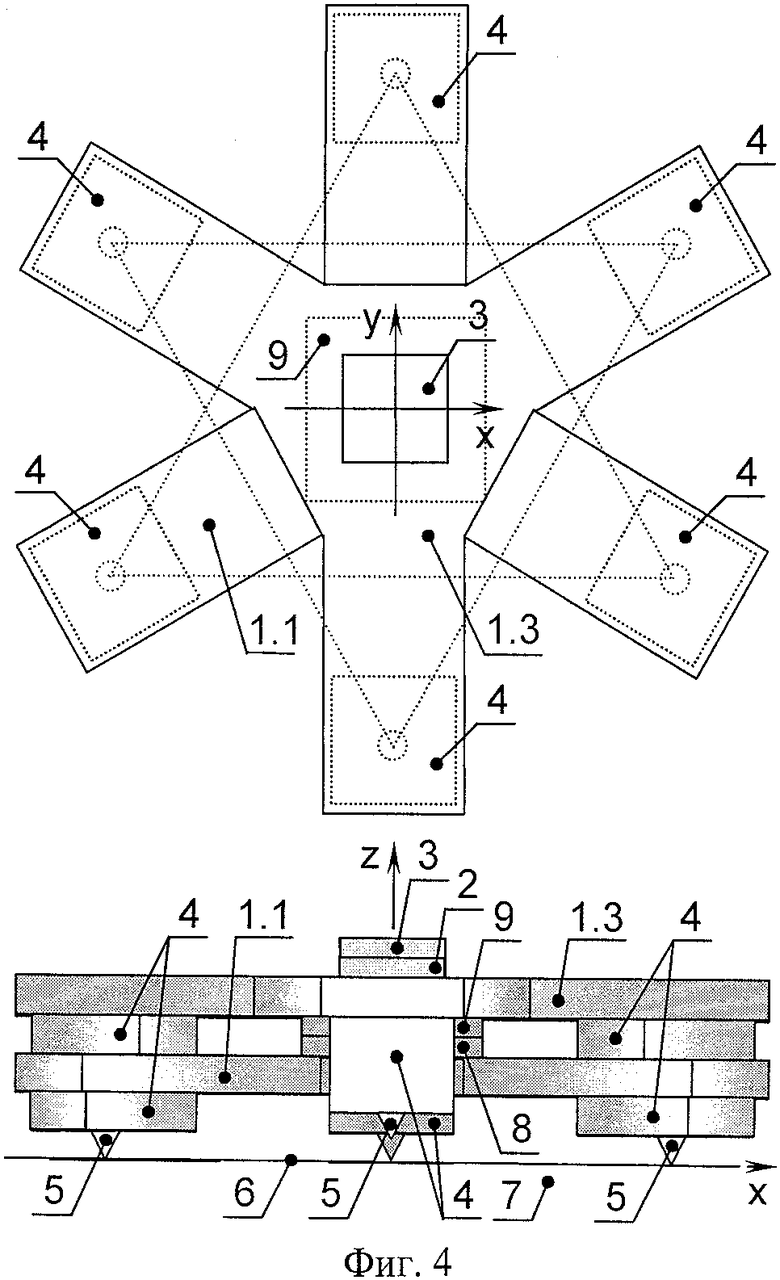
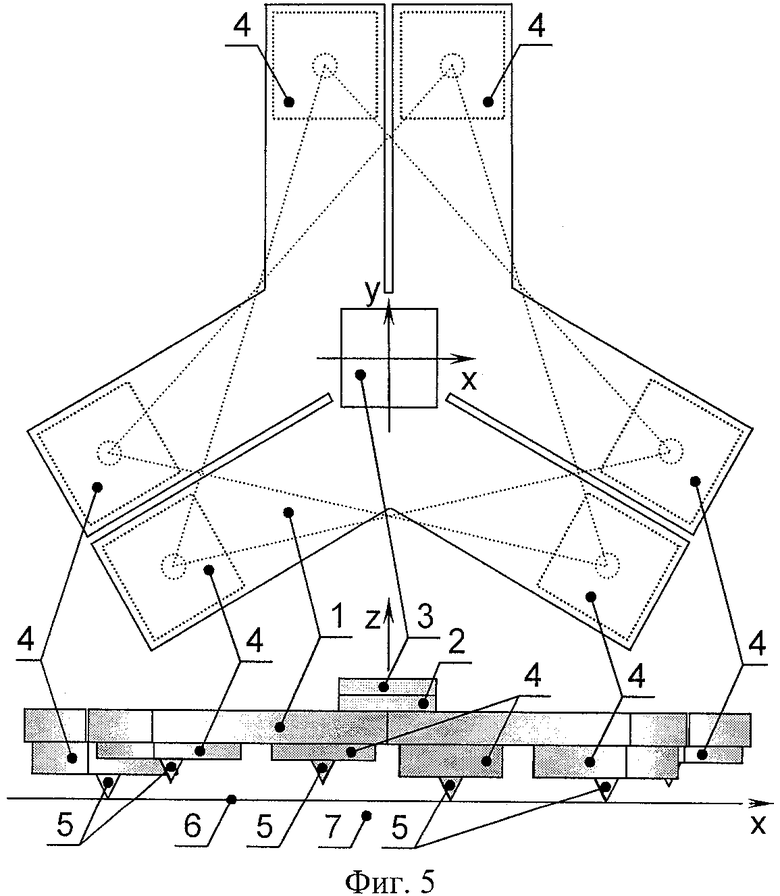
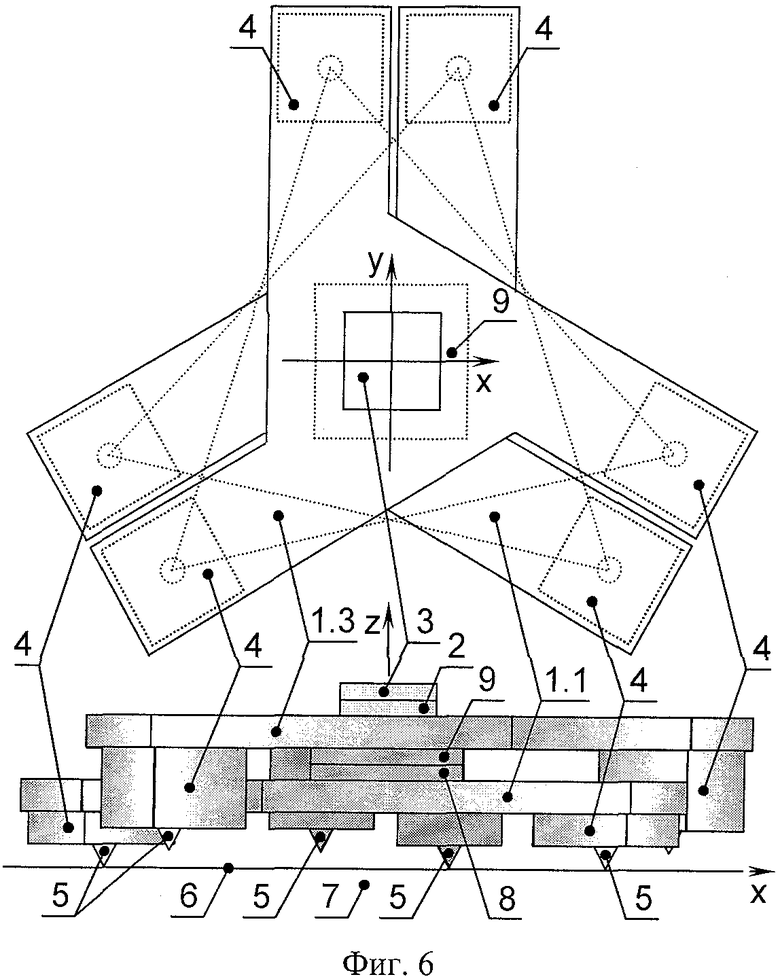
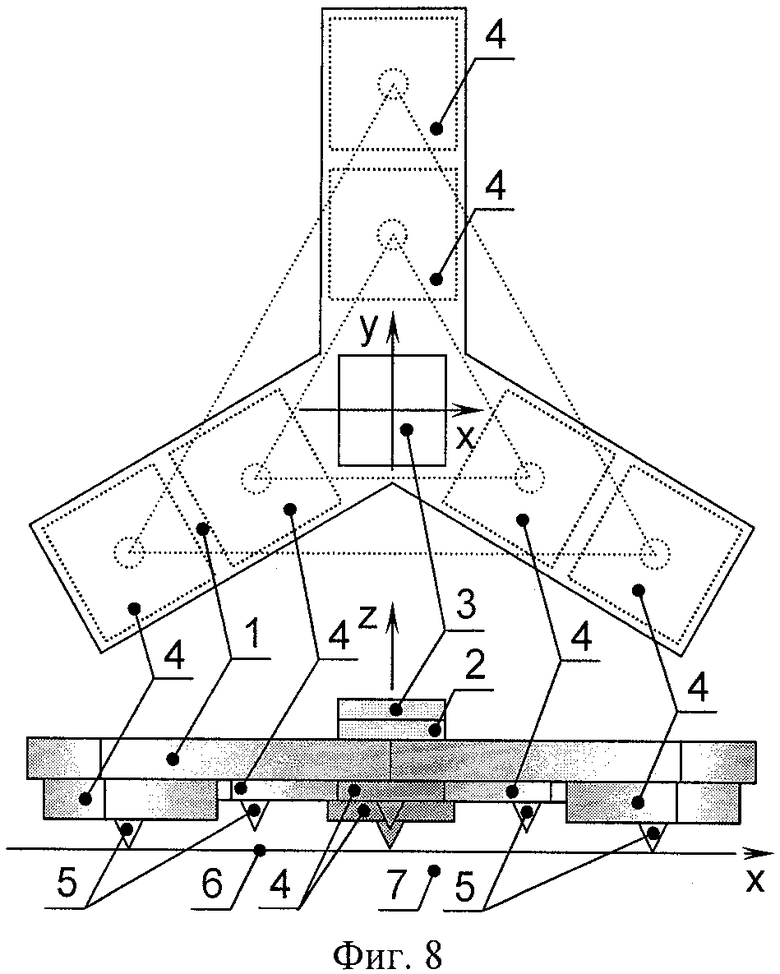
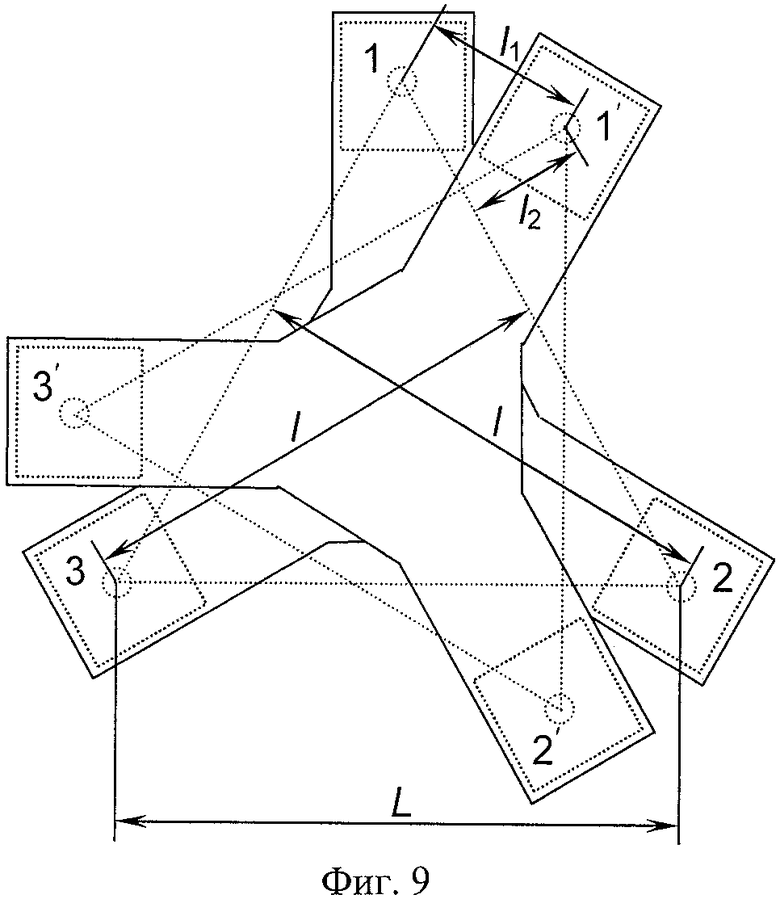
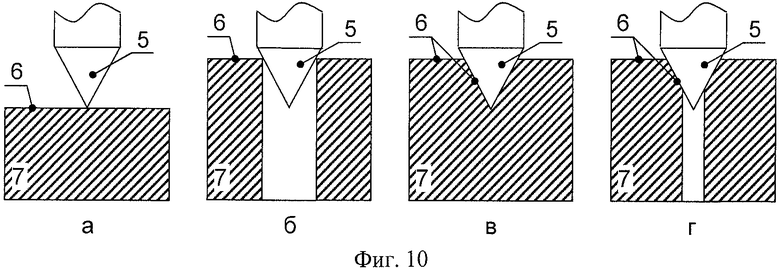
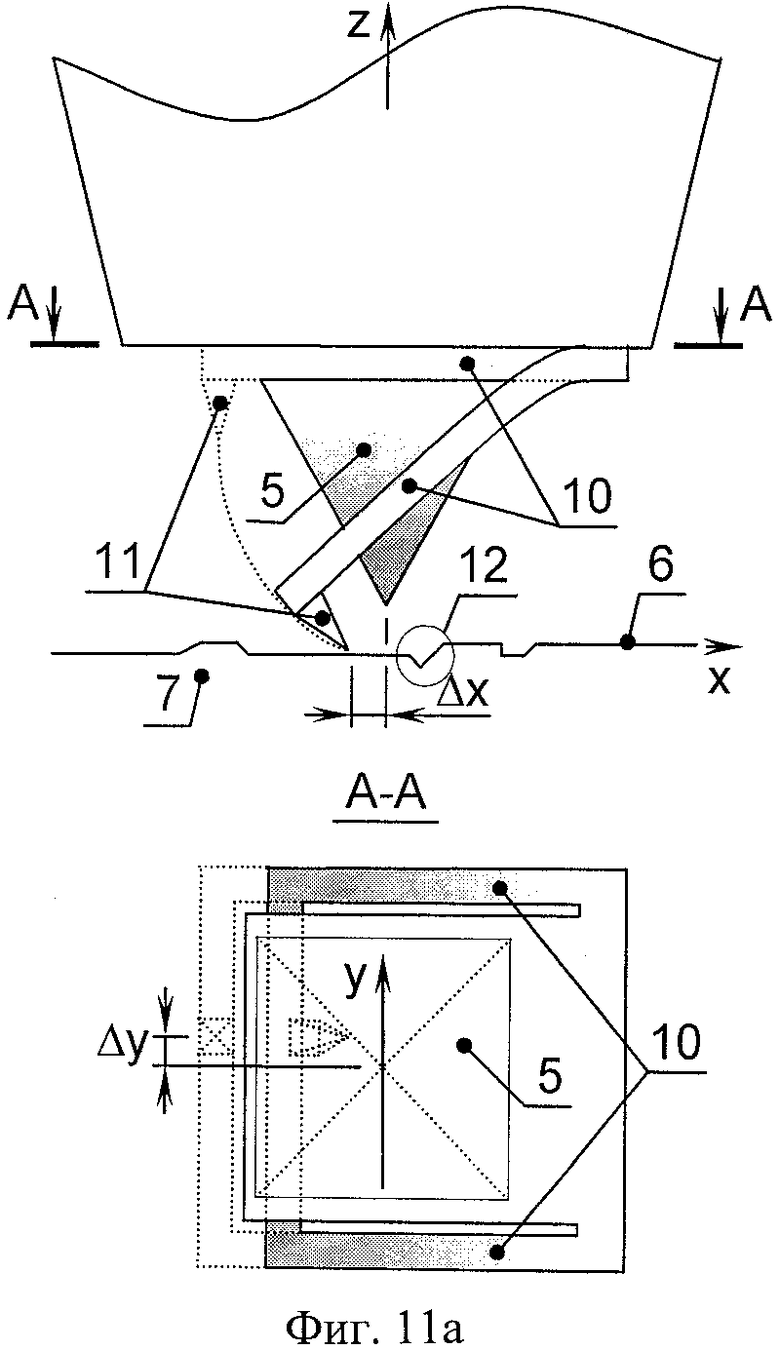
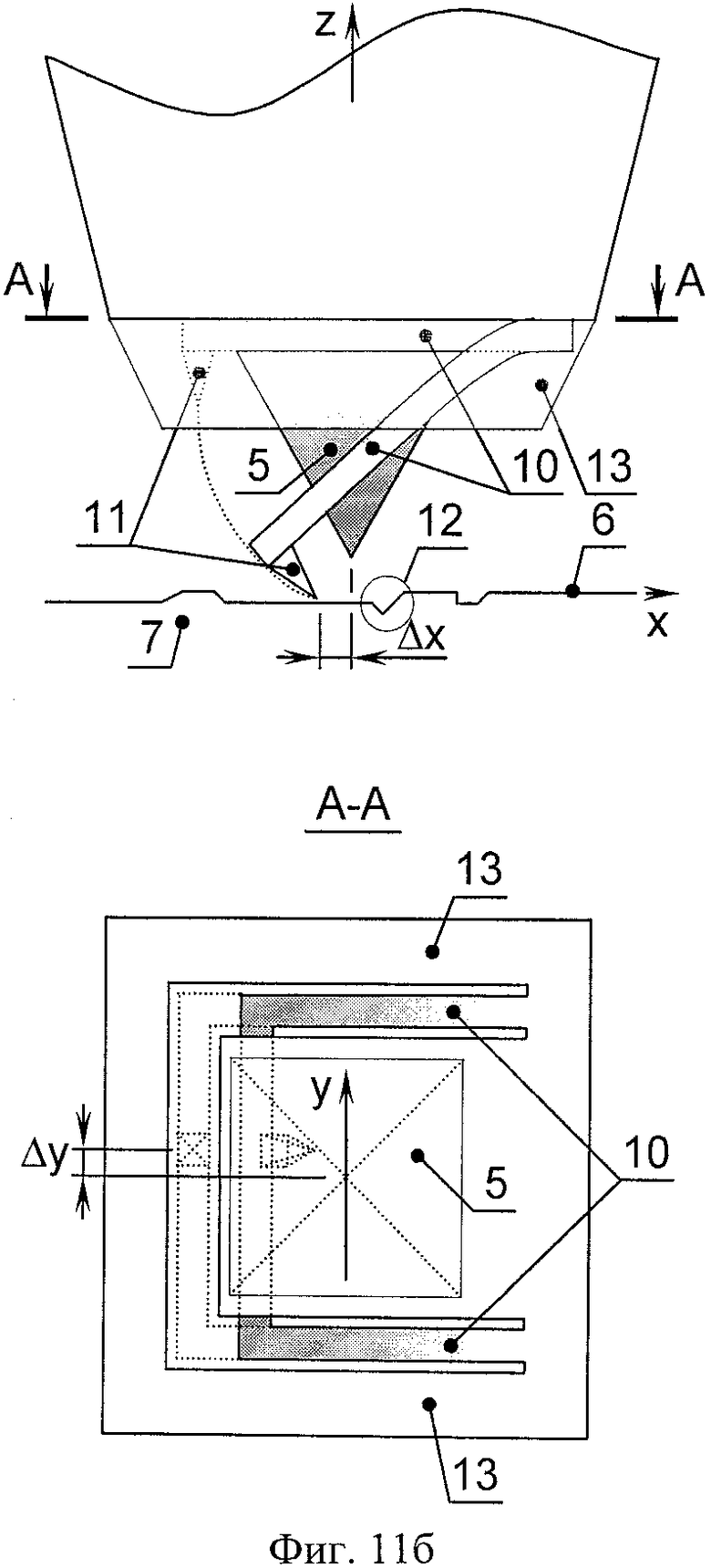
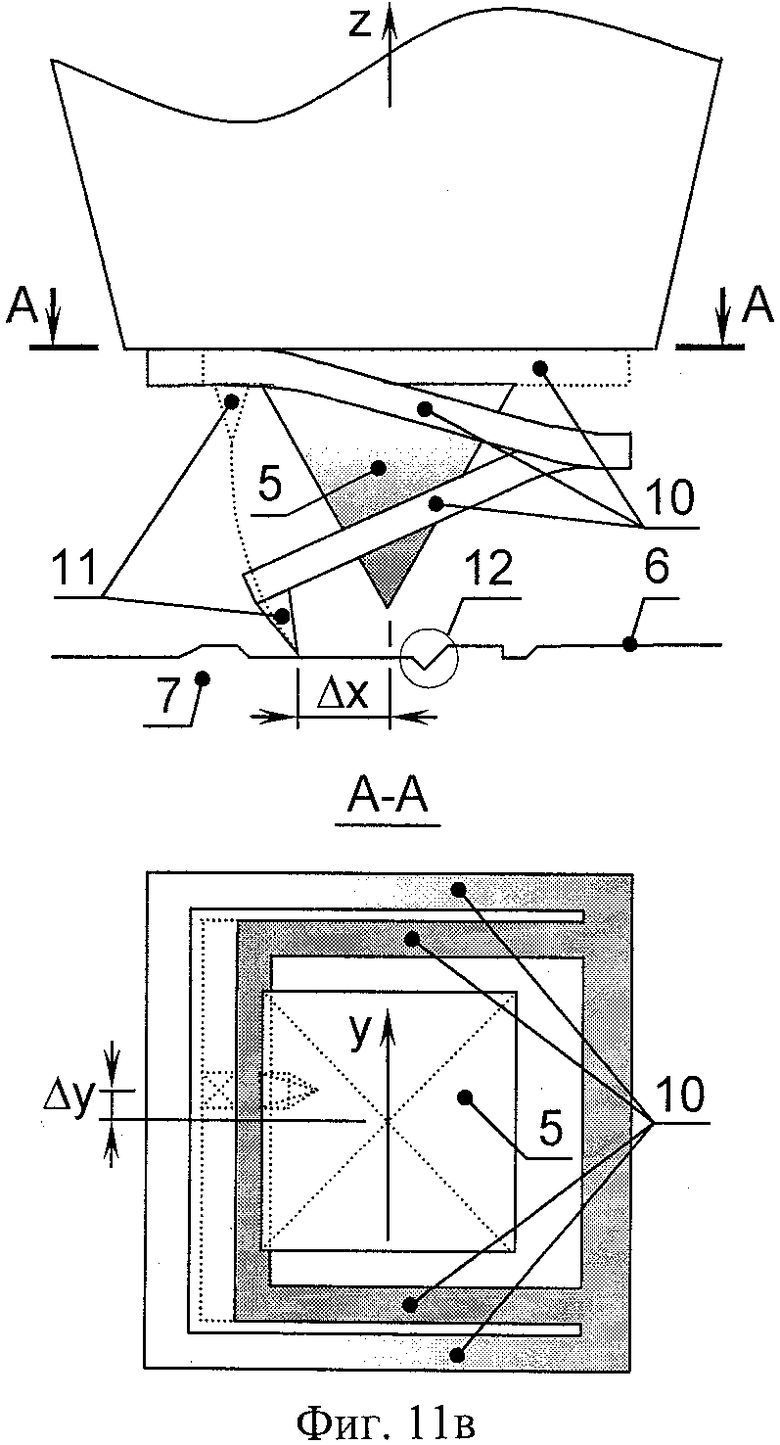
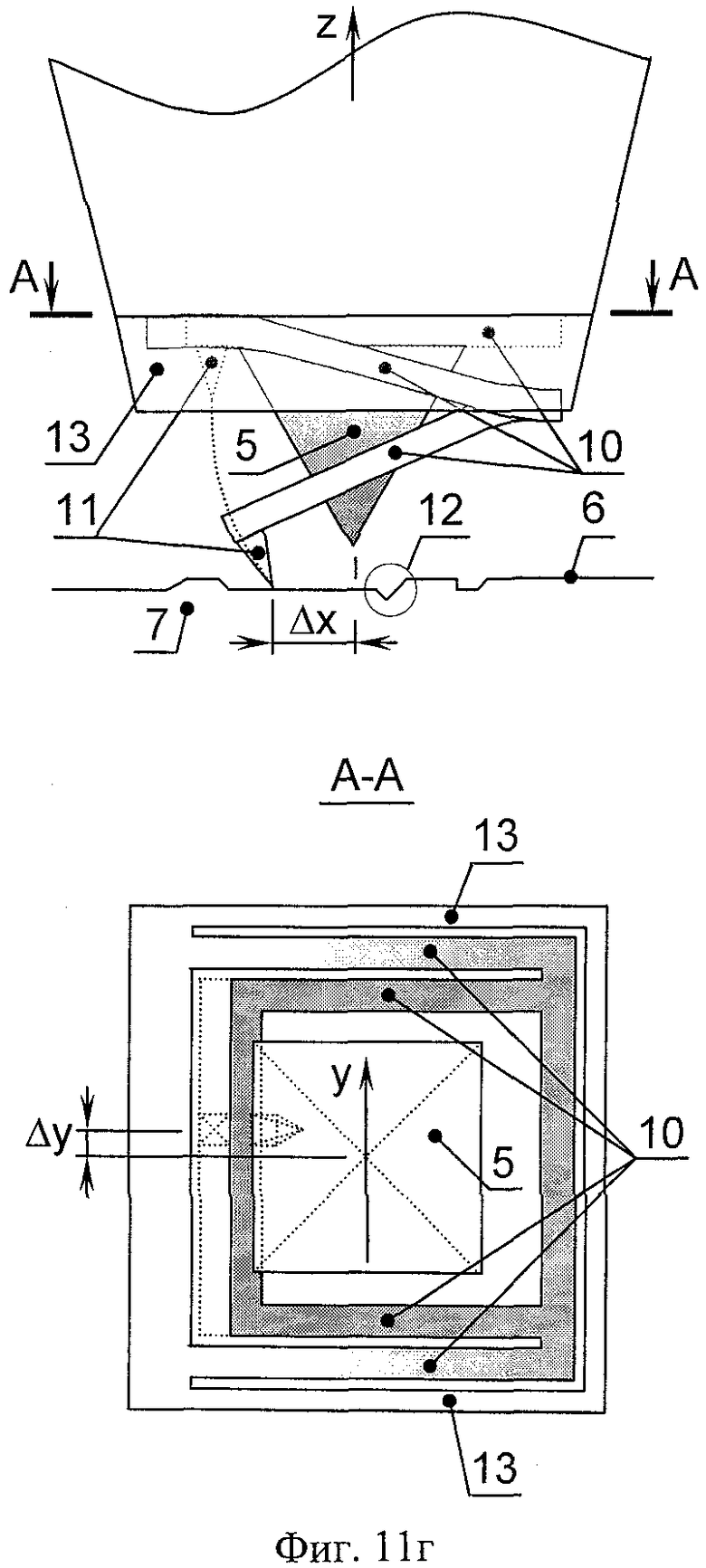
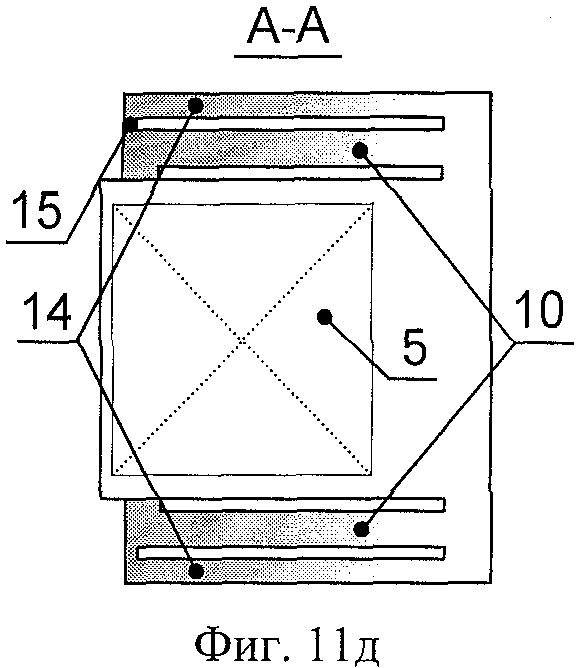
Изобретение относится к сканирующей зондовой микроскопии, микромеханике, робототехнике и нанотехнологии. Шагающий робот-нанопозиционер предназначен для прецизионного перемещения зонда микроскопа или исследуемого под микроскопом образца и содержит перемещаемую платформу, более трех опор и несущую поверхность, его конструктивные элементы изготовлены из материалов с малыми коэффициентами теплового расширения. Опоры расположены в углах правильных многоугольников с образованием лучей, закрепленных центральной деталью, и снабжены собственными X, Y, Z-движителями опор. На свободном конце каждой опоры выполнен выступ из алмаза, кремния или нитрида кремния для контакта с несущей поверхностью. В опоры встроены регистрирующие системы для измерения с помощью зонда рельефа несущей поверхности в месте предполагаемой установки опоры. Робот-нанопозиционер снабжен компьютером, связанным с регистрирующими системами с возможностью получения информации для распознавания и анализа измеренного рельефа несущей поверхности и выработки команд управления X, Y, Z-движителям опор. Изобретение направлено на получение малого стабильно воспроизводимого шага на гладких, шероховатых и наклонных поверхностях при сохранении неограниченного диапазона перемещения. 2 н. и 23 з.п. ф-лы, 11 ил.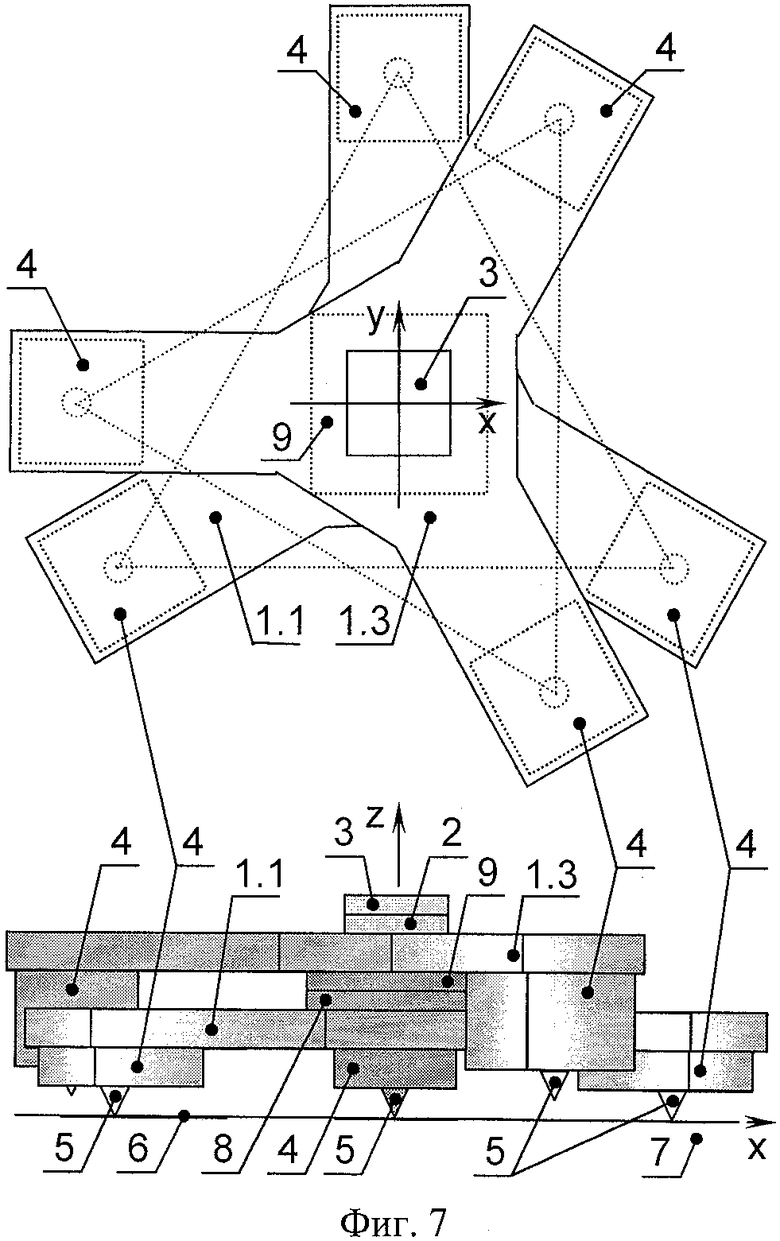
1. Шагающий робот-нанопозиционер, предназначенный для перемещения зонда микроскопа или исследуемого образца, содержащий перемещаемую платформу, опоры и несущую поверхность, отличающийся тем, что его конструктивные элементы изготовлены из материалов с малыми коэффициентами теплового расширения, опоры, число которых более трех, расположены в углах правильных многоугольников с образованием лучей, закрепленных центральной деталью, и снабжены собственными X, Y, Z-движителями опор, причем на свободном конце каждой опоры выполнен выступ, изготовленный из твердого материала в виде алмаза, кремния или нитрида кремния, через который осуществляется контакт с несущей поверхностью, а в опоры встроены регистрирующие системы, выполненные с возможностью измерения с помощью зонда опоры рельефа несущей поверхности в месте предполагаемой установки опоры, при этом робот-нанопозиционер снабжен компьютером, связанным с регистрирующими системами с возможностью получения информации для распознавания и анализа измеренного рельефа несущей поверхности и выработки команд управления X, Y, Z-движителям опор.
2. Робот-нанопозиционер по п.1, отличающийся тем, что на несущей поверхности выполнены ямки, соответствующие по форме и размерам выступу опоры, или ямки, глубина которых такова, что установленный в такую ямку кончик выступа опоры не касается дна ямки.
3. Робот-нанопозиционер по п.1, отличающийся тем, что выступ опоры и несущая поверхность изготовлены из проводящего электрический ток материала или имеют проводящее электрический ток покрытие.
4. Робот-нанопозиционер по п.1, отличающийся тем, что в опору встроена упругая микроконсоль с зондом, которая при установке выступа опоры на несущую поверхность упирается зондом в несущую поверхность, изгибается и, при необходимости, размещается спрятанной в защитной нише.
5. Робот-нанопозиционер по п.1, отличающийся тем, что в опору встроена упругая микроконсоль с зондом, которая снабжена средствами, обеспечивающими ее управляемый изгиб.
6. Робот-нанопозиционер по п.1, отличающийся тем, что в опору встроен датчик нагрузки на опору.
7. Робот-нанопозиционер по п.1, отличающийся тем, что каждый движитель состоит из двух одинаковых частей, выполненных со встречным включением.
8. Робот-нанопозиционер по п.1, отличающийся тем, что он содержит узел смещения в пространстве центра тяжести.
9. Робот-нанопозиционер по п.1, отличающийся тем, что опоры разделены на две группы, перемещение которых относительно друг друга производится посредством общих для обеих групп X, Y, Z-движителей.
10. Робот-нанопозиционер по п.1, отличающийся тем, что опоры разделены на две группы, между которыми установлен компенсирующий термодеформацию элемент, изготовленный из материала с отрицательным коэффициентом теплового расширения.
11. Робот-нанопозиционер по одному из пп.1, 4-10, отличающийся тем, что он устанавливается своими опорами на поверхность образца.
12. Робот-нанопозиционер по одному из пп. 1-7, 9, 10, отличающийся тем, что в рабочем положении он расположен опорами вверх, а сверху на свободные концы опор установлена перемещаемая платформа, нижняя сторона которой является несущей поверхностью, или непосредственно перемещаемый образец.
13. Способ управления передвижением шагающего робота-нанопозиционера по любому из пп.1-12, характеризующийся тем, что осуществляют поочередное перемещение опор по несущей поверхности, при этом передвигаемую опору без контакта с несущей поверхностью переносят на новое место несущей поверхности, производят сканирование рельефа несущей поверхности предполагаемого места установки опоры, выполняют распознавание особенностей полученного рельефа и выбирают среди распознанных на поверхности углублений такое углубление, форма и размеры которого в наибольшей степени совпадают с формой и размерами выступа на кончике опоры, совмещают латеральную позицию выступа с латеральной позицией выбранного углубления и опускают опору на несущую поверхность, причем указанную последовательность действий повторяют для остальных опор, и перемещаемую платформу передвигают в новую позицию, причем в случае отсутствия на несущей поверхности в предполагаемом месте установки опоры среди распознанных особенностей рельефа углубления подходящей формы и размеров место установки опоры смещают и/или увеличивают размер скана и заново выполняют указанную последовательность действий по сканированию, распознаванию и анализу поверхности, при этом в период простоя робота-нанопозиционера периодически производят переустановку или смену опор.
14. Способ по п.13, отличающийся тем, что при перемещении опор смещают в пространстве центр тяжести робота-нанопозиционера с обеспечением его устойчивости.
15. Способ по п.13, отличающийся тем, что одновременно с установкой опоры на несущую поверхность осуществляют снятие освобождаемой опоры с несущей поверхности с обеспечением устойчивости робота-нанопозиционера.
16. Способ по п.13, отличающийся тем, что осуществляют попеременную установку одной группы из трех опор вместо другой группы из трех опор с использованием общих для обеих групп X, Y, Z-движителей.
17. Способ по п.13, отличающийся тем, что в зависимости от реакции следящей системы сканирующего зондового микроскопа и от величины и направления смещения, производимого устанавливаемой или снимаемой опорами, управляют процессом передачи контакта для сведения к нулю паразитного смещения робота-нанопозиционера в вертикальной плоскости.
18. Способ по п.13, отличающийся тем, что следящая система робота-нанопозиционера выполнена с возможностью наблюдения за увеличением тока, протекающего между устанавливаемой опорой и несущей поверхностью, и уменьшением тока, протекающего между снимаемой опорой и несущей поверхностью, и управления процессом передачи контакта для минимизирования паразитного смещения робота-нанопозиционера в вертикальной плоскости.
19. Способ по п.13, отличающийся тем, что следящая система робота-нанопозиционера выполнена с возможностью наблюдения за увеличением изгиба упругой микроконсоли устанавливаемой опоры и за уменьшением изгиба упругой микроконсоли снимаемой опоры и управления процессом передачи контакта для минимизирования паразитного смещения робота-нанопозиционера в вертикальной плоскости.
20. Способ по п.13, отличающийся тем, что следящая система робота-нанопозиционера выполнена с возможностью наблюдения по датчику нагрузки устанавливаемой опоры за увеличением нагрузки на устанавливаемую опору и по датчику нагрузки снимаемой опоры за уменьшением нагрузки на снимаемую опору и управления процессом передачи контакта для сведения к нулю паразитного смещения робота-нанопозиционера в вертикальной плоскости.
21. Способ по п.13, отличающийся тем, что следящая система робота-нанопозиционера использует информацию от встроенных в опоры датчиков нагрузки для одновременной установки на несущую поверхность более трех опор.
22. Способ по п.13, отличающийся тем, что следящая система робота-нанопозиционера выполнена с возможностью в периоды простоя робота-нанопозиционера выполнять слежение каждой свободной опорой за выбранной особенностью поверхности и определять вызванное дрейфом смещение этой особенности для последующего смещения соответствующей установленной опоры на величину обнаруженного смещения.
23. Способ по п.13, отличающийся тем, что следящая система робота-нанопозиционера выполнена с возможностью подачи команды перемещения на X, Y-движители установленной опоры для обеспечения такого изгиба и закрученности микроконсоли этой опоры, которые зафиксированы регистрирующими системами сразу после установки данной опоры на несущую поверхность.
24. Способ по п.13, отличающийся тем, что передают информацию в сканирующий зондовый микроскоп об обнаруженном дрейфе робота-нанопозиционера и производят коррекцию искаженных дрейфом изображений исследуемой поверхности.
25. Способ по п.13, отличающийся тем, что при необходимости многократного повторения последовательности измерительных и/или технологических операций робот-нанопозиционер во время первого прохода запоминает информацию, характеризующую несущую поверхность вдоль трассы движения, и воспроизводит проложенный маршрут нужное число раз.
| US 4422002 A, 20.12.1983 | |||
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЗОНДА СКАНИРУЮЩЕГО МИКРОСКОПА-НАНОЛИТОГРАФА В ПОЛЕ ГРУБОГО X-Y ПОЗИЦИОНЕРА | 1999 |
|
RU2181212C2 |
| СПОСОБ ИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ СКАНИРУЮЩИМ ЗОНДОВЫМ МИКРОСКОПОМ | 1999 |
|
RU2175761C2 |
| US 3952215 A1, 20.04.1976; | |||
| НАНОМЕТРИЧЕСКОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 2002 |
|
RU2233736C2 |
| US 3377489 A, 09.04.1968 | |||

