Изобретение относится к области вооружения и военной техники, в частности к системам управления и стабилизации вооружения (СУСВ) боевых машин типа танков, БМП, БТР, БРДМ и т.п., работающим совместно со стабилизатором вооружения (далее - СВ).
Задача стрельбы с закрытых позиций традиционно решается артиллерией, в том числе самоходными артиллерийскими установками. Решение же задачи стрельбы с закрытых позиций по ненаблюдаемой цели из танков и машин легкой весовой категории типа БМП-3, БМП-4, БМД-4, представляет значительный интерес и обусловлено несколькими причинами:
- наличие на вооружении вероятного противника большого количества противотанковых средств (танки, противотанковые управляемые ракеты (ПТУР), наземные комплексы с ПТУР, ручные противотанковые гранатометы (РПГ)), что требует обеспечения возможности подавления указанных средств собственным огнем или огнем поддержки артиллерии;
- наличие развитых средств разведки, в том числе - беспилотных летательных аппаратов (БПЛА), космических военных спутников, которые при взаимодействии с наземными средствами через быстродействующие информационные каналы автоматической передачи данных, позволяют создать единое информационное пространство поля боя. Комплексное применение указанных средств разведки в современном бою резко сокращает время ведения боевых действий, что в свою очередь приводит к условию сокращения времени подготовки к стрельбе, что в некоторых случаях не позволяет ждать развертывания собственных средств артиллерийских подразделений поддержки;
- наличие преимущества у бронетанковой техники (танки, БМП, БМД) по маневренности и времени подготовки к ведению стрельбы при смене позиции перед самоходной артиллерией.
Известна система управления и стабилизации вооружения (далее - СУСВ) танка Т-72Б, содержащая:
- прицельный комплекс 1А40, описанный в техническом описании и инструкции по эксплуатации на танк Т-72Б (стр.38-51) [1];
- стабилизатор вооружения 2Э42-2, выполненный по схеме электрической принципиальной БС1.370.009 Э3 и описанный в БС1.370.009 ТО, ТУ [2].
(См.) 1) Министерство обороны СССР, Главное бронетанковое управление, Танк Т-72Б. Техническое описание и инструкция по эксплуатации, Книга первая, М, Воениздат, 1986 г. 107 с.(стр.38-51)
2) В.В. Корнеев, М.И. Кузнецов и др. «Основы автоматики и танковые автоматические системы», М., Мин-во обороны, 1976 г., издание Академии бронетанковых войск имени маршала Малиновского Р.Я.
3) А.В. Безлюдько, В.В. Усович, Р.И. Шарипов, И.Н. Янковский, СВ. Юрко В.Р. Стефанович «Устройство танка Т- 72Б», Минск, БИТУ, 2011 г. стр.80-97, 109-124.
Система управления и стабилизации вооружения танка Т-72Б включает в себя прицельный комплекс 1A40 и стабилизатор вооружения, который, в свою очередь, состоит из приводов горизонтального (далее по тексту - ГН) и вертикального (далее по тексту - ВН) наведения и стабилизации. Структурная схема системы управления и стабилизации вооружения изображена на фиг.1. Данная система управления и стабилизации вооружения принята за прототип.
Прицельный комплекс 1A40 (ПК) 1 в основном состоит из задающего устройства стабилизации в плоскости ВН (ЗУС-ВН) 2, блока ввода дальности (БВД) 3, устройства ввода боковых упреждений (УВБУ) 4, пульта наведения оператора (ПН-О) 5 и параллелограммного механизма (ПМ) 6, обеспечивающего электромеханическую связь по ВН стабилизированного поля зрения прицела с установленным вооружением (В) 7.
Задающее устройство стабилизации в плоскости ВН (ЗУС-ВН) 2 в основном состоит из:
- трехстепенного гироскопа вращающегося с большой угловой скоростью и обеспечивающего стабилизацию поля зрения;
- зеркала прицела формирующего поле зрения, механически связанного с наружной рамкой трехстепенного гироскопа через ленточную передачу;
- датчика угла по ВН (вращающийся трансформатор), ротор которого механически связан с осью наружной рамки трехстепенного гироскопа, а статор механически соединен с параллелограммным механизмом (ПМ) 6, испытывая, тем самым, те же угловые колебания при движении танка, что и вооружение (В) 7 в плоскости ВН. Датчик угла по ВН (ЗУС-ВН) 2 электрически связан с входом модуля управления (МУ) 8 блока управления (БУ) 9 стабилизатора вооружения (СВ) 10, формируя на его входе сигнал рассогласования (ошибки) в плоскости ВН.
Блок ввода дальности (БВД) 3 служит для автоматического введения измеренной дальности до цели в задающее устройство стабилизации по ВН (ЗУС-ВН) 2, что необходимо для автоматической отработки прицельной маркой полученной дальности с учетом выбранного боеприпаса (типа баллистики).
Устройство ввода боковых упреждений (УВБУ) 4 используется совместно с задающим устройством стабилизации по ВН (ЗУС-ВН) 2 и служит для автоматической выработки угла бокового упреждения с учетом измеренной дальности, типа баллистики, скорости относительного движения цели, а также метеобаллистических условий, определяемых по соответствующим номограммам (графикам), расположенным на защитном щитке ограждения вооружения (В) 7.
Пульт наведения оператора (ПН-О) 5 состоит из двух потенциометров (резисторов) вертикального и горизонтального наведения, электрически связанных соответственно с магнитами наведения задающего устройства стабилизации по ВН (ЗУС-ВН) 2 и магнитами наведения задающего устройства стабилизации по ГН (ЗУС-ГН) 11, жестко связанного с установленным вооружением (В) 7. Пульт наведения оператора (ПН-О) 5 обеспечивает наведение соответственно стабилизированной линии визирования в плоскости ВН и линии визирования в плоскости ГН, жестко связанной с башней и стабилизированной за счет привода ГН стабилизатора вооружения (СВ) 10.
Стабилизатор вооружения (СВ) 10 в основном состоит из привода ГН и привода ВН, представляющих собой автономные привода, обеспечивающие наведение и стабилизацию вооружения танка в плоскостях ВН и ГН по сигналам, поступающим соответственно от задающего устройства стабилизации по ВН (ЗУС-ВН) 2 прицельного комплекса (ПК) 1 и от задающего устройства стабилизации по ГН (ЗУС-ГН) 11 стабилизатора вооружения (СВ) 10.
Привод ГН стабилизатора вооружения (СВ) 10 построен на базе электромеханического привода, а привод ВН на базе электрогидравлического привода.
Принципы работы приводов ВН и ГН стабилизатора вооружения (СВ) 10 в режимах стабилизации и стабилизированного наведения во многом схожи. Каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Рассмотрим работу каждого из приводов ВН и ГН стабилизатора вооружения (СВ) 10 в отдельности.
Режим стабилизации по ВН - режим стабилизации вооружения по ВН осуществляется относительно сигнала с датчика угла по ВН (датчика положения линий визирования по ВН (ЗУС-ВН) 2 прицельного комплекса (ПК) 1, имеющего независимую стабилизацию линий визирования (зеркала) в плоскости ВН, что обеспечивается, как описано выше, гиростабилизатором задающего устройства стабилизации по ВН (ЗУС-ВН) 2.
При движении танка по пересеченной местности на вооружение (В) 7 действуют внешние возмущения в виде колебаний корпуса танка, трения в цапфах (опорах) вооружения (В) 7, трения в исполнительном цилиндре гидропривода ВН (ГП) 12, а также возмущения, обусловленные неуравновешенностью вооружения (В) 7 относительно оси цапф.
Эти возмущения вызывают отклонение вооружения (В) 7 от заданного сигналом датчика положения линий визирования по ВН (ЗУС-ВН) 2 направления. Угол между заданным и действительным направлением вооружения (В) 7 в вертикальной плоскости, в этом случае, и определяет ошибку стабилизации стабилизатора вооружения (СВ) 10 по ВН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается гидроприводом ВН (ГП) 12 стабилизатора вооружения (СВ) 10, поворачивающим вооружение (В) 7 в сторону уменьшения ошибки.
Полученная, таким образом, ошибка стабилизации по ВН обрабатывается аналоговым модулем управления 8 блока управления (БУ) 9 стабилизатора вооружения (СН) 10. Сигнал управления по ВН с второго выхода модуля управления 8 через усилитель (У-ВН) 13 управляет механизмом управления гидроцилиндра гидропривода ВН (ГП) 12, тем самым обеспечивая поворот вооружения (В) 7 в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения линий визирования по ВН (ЗУС-ВН) 2 и истинным положениями вооружения (В) 7 в плоскости ВН.
Для повышения устойчивости привода ВН и как следствие получения заданной ошибки стабилизации в контур управления привода ВН стабилизатора введена обратная связь по абсолютной угловой скорости вооружения (В) 7 в плоскости ВН с (ДУС-ВН) 14, обрабатываемая аналоговым модулем управления 8 блока управления (БУ) 9.
Режим стабилизированного наведения по ВН - режим стабилизированного наведения вооружения (В) 7 по ВН осуществляется также по сигналу с датчика положения линии визирования по ВН (ЗУС-ВН) 2. При обнаружении цели наводчик пультом наведения (ПН-О) 5 наводит, как было описано выше, стабилизированную в плоскости ВН линию визирования (прицельную марку) (ЗУС-ВН) 2 на цель в плоскости ВН. Сигнал с датчика положения линий визирования по ВН (ЗУС-ВН) 2, пропорциональный ошибке стабилизации по ВН, поступает на вход модуля управления 8 блока управления (БУ) 9, где происходит его преобразование с выдачей сигнала управления на усилитель (У-ВН) 13. Гидропривод ВН (ГП) 12 поворачивает вооружение (В) 7 в сторону уменьшения ошибки по ВН, аналогично рассмотренному выше режиму стабилизации в плоскости ВН.
Режим стабилизации по ГН - режим стабилизации пушки по ГН осуществляется по сигналу датчика положения (угла) по ГН (ЗУС-ГН) 11 стабилизатора вооружения (СН) 10. Задающее устройство стабилизации по ГН (ЗУС-ГН) 11 жестко закреплено на вооружении (В) 7 и состоит из трехстепенного гироскопа с датчиком положения наружной рамки, механизм работы которого аналогичен работе гиростабилизатора задающего устройства стабилизации по ВН (ЗУС-ВН) 2 прицельного комплекса (ПК) 1.
При движении танка по пересеченной местности на боевой модуль (БМ) 15 (вооружение (В) 7) действуют внешние возмущения в виде колебаний корпуса танка, трения в погоне боевого модуля (БМ) 15, а также возмущения, обусловленные неуравновешенностью боевого модуля (БМ) 15 относительно оси вращения.
Эти возмущения вызывают отклонение боевого модуля (БМ) 15 (вооружения (В) 7) от заданного сигналом датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 11 направления. Угол между заданным и действительным направлением боевого модуля (БМ) 15 (вооружения (В) 7) в горизонтальной плоскости в этом случае и определяет ошибку стабилизатора вооружения (СВ) 10 по ГН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается приводом ГН стабилизатора вооружения (СВ) 10, поворачивающим боевой модуль (БМ) 15 (вооружение (В) 7) в сторону уменьшения ошибки. При стабилизации боевого модуля (БМ) 15 одновременно осуществляется и стабилизация линии визирования по ГН прицельного комплекса (ПК) 1 (зависимая стабилизация линии визирования).
Полученная таким образом ошибка стабилизации по ГН обрабатывается аналоговым модулем управления 8 блока управления (БУ) 9 стабилизатора вооружения (СВ) 10. Сигнал с первого выхода модуля управления 8 через усилитель (У-ГН) 16 поступает на усилитель мощности (УМ-ГН) 17. Электромашинный усилитель мощности (УМ-ГН) 17, в свою очередь, вырабатывает напряжение соответствующего знака и амплитуды, под действием которого исполнительный электродвигатель (ЭД ГН) 18 через редуктор (Ред.ГН) 19 поворачивает боевой модуль (БМ) 15 (вооружение (В) 7) танка в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 11 и истинным положением боевого модуля (БМ) 15 (вооружения (В) 7) в горизонтальной плоскости.
Режим стабилизированного наведения по ГН - режим стабилизированного наведения боевого модуля (БМ) 15 (вооружения (В) 7) по ГН осуществляется также по сигналу с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 11. При обнаружении цели наводчик пультом наведения (ПН-О) 5 по ГН (ПК) 1 наводит линию визирования (прицельную марку) по ГН прицельного комплекса (ПК) 1 на цель в плоскости ГН, что обеспечивается за счет магнитов наведения гиростабилизатора и сигнала с датчика положения (угла) по ГН задающего устройства стабилизации по ГН (ЗУС-ГН) 11 стабилизатора вооружения (СВ) 10. Сигнал с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 11, пропорциональный ошибке стабилизации по ГН, поступает на вход модуля управления 8 блока управления (БУ) 9, где происходит его преобразование как описано выше. Исполнительный электродвигатель (ЭД ГН) 18 через редуктор (Ред.ГН) 19 поворачивает боевой модуль (БМ) 15 (вооружение (В) 7) танка, а с ним и линию визирования (ПК) 1 в сторону уменьшения ошибки по ГН, аналогично рассмотренному выше режиму стабилизации в плоскости ГН.
Недостатками вышеуказанной системы управления и стабилизации вооружения - прототипа являются:
- построение системы управления на аналоговой платформе, что исключает возможность ее интеграции в системы верхнего уровня, например в единую систему управления тактического звена (далее - ЕСУТЗ), из-за отсутствия информационных каналов обмена и цифровых процессоров обработки данных, что также, в свою очередь, не позволяет проводить ее модернизацию с минимальными временными и финансовыми затратами;
- наличие зависимой стабилизации линии визирования по ГН прицельного комплекса СУСВ (стабилизирована за счет силового привода ГН стабилизатора вооружения), что не позволяет вести прицельную стрельбу из ОВН на больших дальностях с необходимой в современных условиях точностью;
- отсутствие возможности автоматического решения СУСВ баллистической задачи с возможностью учета основной массы факторов, влияющих на точность попадания в цель с первого выстрела (таких как скорость и направление ветра, температура воздуха, температура заряда, величина атмосферного давления);
- отсутствие возможности реализации стрельбы из вооружения ОВН с закрытых позиций по ненаблюдаемой цели при существующем построении СУСВ;
- отсутствие возможности оперативного контроля, настройки и диагностики СУСВ в составе ОВН.
Техническими задачами заявляемого изобретения являются;
- расширение функциональных возможностей СУСВ и повышение ее эксплуатационной интероперабельности;
- введение в структуру СУСВ дополнительных устройств, обеспечивающих независимую двухплоскостную стабилизацию линии визирования по ГН и ВН;
- повышение точности решения баллистической задачи;
- реализация СУСВ решения задачи стрельбы с закрытых позиций по ненаблюдаемой цели;
- повышение эксплуатационных показателей СУСВ.
Для достижения указанного технического результата в известную систему управления и стабилизации вооружения (СУСВ), содержащую установленное вооружение (В), с закрепленным на нем датчиком абсолютной угловой скорости по ВН (ДУС-ВН) стабилизатора вооружения (СВ), боевой модуль (БМ) (башню), с установленным на нем вооружением (В), стабилизатор вооружения (СВ), прицельный комплекс (ПК), блок управления (БУ) стабилизатора вооружения (СВ), электродвигатель ГН (ЭД ГН) стабилизатора вооружения (СВ), редуктор ГН (Ред. ГН), механически связанный с боевым модулем и электродвигателем ГН (ЭД ГН) стабилизатора вооружения (СВ), усилитель мощности ГН (УМ-ГН) стабилизатора вооружения (СВ), электрически связанного с бортсетью ОВН, электродвигателем ГН (ЭД ГН) и усилителем ГН блока управления (БУ) стабилизатора вооружения (СВ), гидропривод ВН (ГП) стабилизатора вооружения (СВ), механически связанный с боевым модулем (БМ), установленным вооружением (В) и электрически связанным с бортсетью ОВН и усилителем ВН блока управления стабилизатора вооружения (СВ), модуль управления блока управления (БУ) стабилизатора вооружения (СВ), электрически связанный с датчиком абсолютной угловой скорости по ВН (ДУС-ВН) и усилителями ГН (У-ГН) и ВН (У-ВН) блока управления (БУ) стабилизатора вооружения (СВ), пульт наведения оператора (ПН-О) прицельного комплекса (ПК), согласно изобретению дополнительно введены:
- радиостанция цифровая (РЦ);
- система навигации (СН), включающая в себя:
- модуль антенный (МА);
- датчик наклона и курса (ДНК);
- датчик пути (ДП);
- картограф (К);
- первая последовательная шина (ПШ1);
- вторая последовательная шина (ПШ2);
- в прицельный комплекс (ПК) дополнительно введены:
- задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и ГН (ЗУС);
- баллистический вычислитель (БВ);
- датчик скорости ветра (ДВ);
- датчик температуры заряда (ДТЗ);
- датчик температуры воздуха (ДТВ);
- датчик атмосферного давления (ДАД);
- датчик положения установленного вооружения по ВН (ДПВ);
- третья последовательная шина (ПШЗ);
- в блок управления (БУ) дополнительно введен блок сопряжения
(БС);
- датчик положения боевого модуля (ДПБМ);
- четвертая последовательная шина (ПШ4);
- пятая последовательная шина (ПШ5);
- датчик абсолютной угловой скорости по ГН (ДУС-ГН),
при этом задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и ГН (ЗУС) электрически связано с пультом наведения оператора (ПН-О) и баллистическим вычислителем (БВ), задающее устройство стабилизации (ЗУС), пульт наведения оператора (ПН-О) и баллистический вычислитель (БВ) в свою очередь электрически связаны с первой последовательной шиной (ПШ1), датчик положения боевого модуля (ДПБМ) механически связан с боевым модулем (БМ) и электрически связан со второй последовательной шиной (ПШ2), а датчик угловой скорости ГН (ДУС-ГН) механически связан с установленным вооружением (В) и электрически связан с модулем управления блока управления (БУ) стабилизатора вооружения (СВ),
при этом баллистический вычислитель (БВ) электрически связан с третьей последовательной шиной (ПШЗ), которая в свою очередь электрически связана с датчиком скорости ветра (ДВ), датчиком температуры заряда (ДТЗ), датчиком температуры воздуха (ДТВ), датчиком атмосферного давления (ДАД) и датчиком положения установленного вооружения по ВН, механически связанным с установленным вооружением,
при этом радиостанция цифровая (РЦ) электрически связана с четвертой последовательной шиной (ПШ4), которая электрически связана с картографом (К) системы навигации, картограф (К) в свою очередь электрически связан с модулем антенным (МА), датчиком наклона и курса (ДНК), датчиком пути (ДП) и пятой последовательной шиной (ПШ5),
в свою очередь первая последовательная шина (ПШ1), вторая последовательная шина (ПШ2) и пятая последовательная шина (ПШ5) электрически связаны с блоком сопряжения блока управления (БУ), который дополнительно электрически связан с модулем управления блока управления (БУ) стабилизатора вооружения (СВ).
при этом, с одной стороны, первый выход модуля управления блока управления (БУ) электрически связан с усилителем ГН (У-ГН), который в свою очередь электрически связан с усилителем мощности ГН (УМ-ГН), вращающим вал электродвигателя ГН (ЭД ГН), который через редуктор ГН (Ред.ГН) поворачивает боевой модуль (БМ) с установленным вооружением (В), а с ним и вал датчика положения боевого модуля (ДПБМ) в заданном угловом направлении,
с другой стороны, второй выход модуля управления блока управления (БУ) электрически связан с усилителем ВН (У-ВН), который в свою очередь электрически связан с гидроприводом ВН (ГП), поворачивающим установленное вооружение (В) в плоскости ВН, а с ним и вал датчика положения вооружения (ДПВ) в заданном угловом направлении.
Сопоставительный анализ с прототипом показывает, что заявляемая СУСВ отличается наличием новых элементов, а именно:
- радиостанция цифровая (РЦ);
- система навигации (СН), включающая в себя:
- модуль антенный (МА);
- датчик наклона и курса (ДНК);
- датчик пути (ДП);
- картограф (К);
- первая последовательная шина (ПШ1);
- вторая последовательная шина (ПШ2);
- в прицельный комплекс (ПК) дополнительно введены:
- задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и ГН (ЗУС);
- баллистический вычислитель (БВ);
- датчик скорости ветра (ДВ);
- датчик температуры заряда (ДТЗ);
- датчик температуры воздуха (ДТВ);
- датчик атмосферного давления (ДАД);
- датчик положения установленного вооружения по ВН (ДПВ);
- третья последовательная шина (ПШЗ);
- в блок управления (БУ) дополнительно введен блок сопряжения (БС);
- датчик положения боевого модуля (ДПБМ);
- четвертая последовательная шина (ПШ4);
- пятая последовательная шина (ПШ5);
- датчик абсолютной угловой скорости по ГН (ДУС-ГН); их связями с другими элементами СУСВ и ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в СУСВ позволяет:
- расширить функциональные возможности СУСВ и повысить ее эксплуатационную интероперабельность за счет:
а) введения в ее структуру современных цифровых процессоров обработки информации и высокоскоростных цифровых информационных каналов обмена с внешними устройствами ОВН, что позволяет повысить функциональные и эксплуатационные характеристики СУСВ (интегрирование СУСВ в ЕСУТЗ) и возможность ее установки на другие ОВН без существенной их доработки и в сжатые сроки;
б) введения во внутреннюю структуру СУСВ дополнительных цифровых информационных каналов обмена, позволяющих проводить настройку и диагностику СУСВ, как при помощи внешних устройств диагностики и настройки, подключаемых к контрольному разъему блока управления СУСВ, так и при помощи встроенных средств диагностики и настройки ОВН, в частности через монитор и клавиши управления, встроенные в картограф системы навигации;
- обеспечить независимую двухплоскостную стабилизацию линии визирования по ГН и ВН за счет введения в структуру СУСВ современного задающего устройства стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и ГН и тем самым повысить точность стабилизации по ВН и в особенности по ГН;
- повысить точность решения баллистической задачи за счет введения в СУСВ цифрового баллистического вычислителя с набором необходимых датчиков, таких как скорость и направление ветра, температура воздуха, температура заряда, величина атмосферного давления и современного лазерного дальномера (также как и в СУСВ-прототипе) встроенного в прицельный комплекс;
- реализовать в СУСВ решение задачи стрельбы с закрытых позиций по ненаблюдаемой цели за счет:
а) введения в структуру СУСВ дополнительных систем и датчиков, а именно, современной цифровой радиостанции, современной системы навигации (СН) с набором необходимых датчиков и модулей, датчика положения боевого модуля и современного цифрового баллистического вычислителя с требуемым набором датчиков, примененный перечень которых позволяет комплексно решать поставленную задачу;
б) наличия в структуре СДУВ информационных каналов обмена, позволяющих объединить все системы и датчики в единую информационную сеть.
- повысить внутренние эксплуатационные показатели СУСВ за счет введения цифровых контуров управления и коррекции приводами ГН и ВН, что позволяет применить адаптивные и оптимальные алгоритмы управления СУСВ, гибко менять ее параметры при изменении механических параметров ОВН в процессе его эксплуатации.
Предлагаемое изобретение позволяет за счет применения новых приборов и узлов, построенных на цифровой платформе улучшить технические и эксплуатационные характеристики боевых модулей, указанных выше машин, решить вопросы по их оперативной настройке и диагностике, а также значительно расширить функциональные возможности боевого применения данных машин, в частности обеспечить стрельбу с закрытых позиций по ненаблюдаемой цели. Это достигается за счет совершенствования системы управления вооружением и стабилизатора вооружения боевого модуля (БМ) объекта военного назначения (ОВН). Реализация этих возможностей в определенной боевой обстановке может стать решающим фактором применения данного вида вооружения против вероятного противника.
На фиг.1 приведена структурная схема системы управления и стабилизации вооружения-прототипа 2Э42-2 танка Т-72Б; на фиг.2 приведена заявляемая структурная схема системы управления и стабилизации вооружения.
Сокращения, принятые в тексте и на фиг.1 и фиг.2:
БВ - баллистический вычислитель;
БВД - блок ввода дальности;
БМ - боевой модуль;
БУ - блок управления;
В - установленное вооружение;
ГП - гидропривод ВН;
ДАД - датчик атмосферного давления;
ДВ - датчик скорости ветра;
ДТ3 - датчик температуры заряда;
ДПБМ - датчик положения боевого модуля по ГН;
ДПВ - датчик положения установленного вооружения по ВН;
ДП - датчик пути;
ДНК - датчик наклона и курса;
ДТВ - датчик температуры воздуха;
ДУС-ВН - датчик абсолютной угловой скорости по ВН;
ДУС-ГН - датчик абсолютной угловой скорости по ГН;
ЕСУТ3 - единая система управления тактического звена;
ЗУС - задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и ГН;
ЗУС-ВН - задающее устройство стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ВН;
ЗУС-ГН - задающее устройство стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН;
К - картограф с монитором и клавиатурой;
МА - модуль антенный для работы со спутниковыми системами GPS, ГЛОНАСС;
ОВН - объект военного назначения;
ПК - прицельный комплекс;
ПМ - параллелограммный механизм;
ПН-О - пульт наведения оператора;
ПШ1 - первая последовательная шина;
ПШ2 - вторая последовательная шина;
ПШ3 - третья последовательная шина;
ПШ4 - четвертая последовательная шина;
ПШ5 - пятая последовательная шина;
РЦ - радиостанция цифровая для получения внешнего ЦУ и работы в составе ЕСУТЗ;
Ред.ГН - редуктор ГН;
СВ - стабилизатор вооружения;
СН - система навигации;
УВБУ - устройство ввода бокового упреждения;
У-ВН - усилитель ВН блока управления;
У-ГН - усилитель ГН блока управления;
УМ-ГН - усилитель мощности ГН;
ЦУ - внешнее целеуказание (получение координат цели для стрельбы с закрытой позиции по ненаблюдаемой цели);
ШИМ - широтно-импульсный модулятор;
ЭД ГН - электродвигатель ГН;
СУСВ работает следующим образом.
Заявляемая СУСВ представляет собой автономно работающие привода управления, наведения и стабилизации боевого модуля и установленного вооружения в плоскостях ГН и ВН.
Датчики положения (угла) независимо стабилизированного инерциального объекта по ГН и ВН задающего устройства стабилизации (ЗУС), датчики абсолютной угловой скорости ГН (ДУС-ГН) и ВН (ДУС-ВН), датчики положения боевого модуля (ДПБМ) и установленного вооружения (ДПВ) соответственно по ГН и ВН через блок сопряжения (БС) блока управления (БУ) формируют в модуле управления (МУ) блока управления (БУ) цифровые сигналы ошибок по ГН и ВН, сигналы по абсолютной угловой скорости установленного вооружения по ВН и ГН, сигналы по относительному положению боевого модуля и установленного вооружения, соответствующие сигналы баллистических угловых поправок по ВН и ГН, выработанные прицельным комплексом (ПК), а также сигналы координаты цели при внешнем ЦУ и координаты самого ОВН, формируемые системой навигации (СН) при автономной или совместной работе с цифровой радиостанцией (РЦ).
Привод ГН содержит прицельный комплекс (ПК) 1, включающий пульт наведения оператора (ПН-О) 2 с датчиком положения рукоятки по ГН, задающее устройство стабилизации с датчиком положения независимого стабилизированного в пространстве инерциального объекта по ГН (ЗУС) 3, электрически связанное с пультом наведения оператора (ПН-О) 2 и с баллистическим вычислителем (БВ) 4. Электрические сигналы пульта наведения оператора (ПН-О) 2 по ГН, задающего устройства стабилизации (ЗУС) 3, баллистического вычислителя (БВ) 4, электрически связаны с первой последовательной шиной (ПШ1) 5, представляющей собой дублированную линию передачи сигналов последовательного протокола типа CAN и RS422, и через (ПШ1) 5 электрически связаны с блоком сопряжения 6 блока управления (БУ) 7, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422, который в свою очередь связан с модулем управления 8, представляющим собой процессорный модуль для обработки цифровых и аналоговых сигналов. В свою очередь первый выход модуля управления 8 связан с усилителем ГН (У-ГН) 9 блока управления (БУ) 7, представляющим собой усилитель аналогового сигнала широтно-импульсной модуляции (ШИМ). Усилитель ГН (У-ГН) 9 блока управления (БУ) 7 связан с усилителем мощности ГН (УМ-ГН) 10, который в свою очередь связан с бортовой сетью ОВН и представляет собой электромашинный усилитель, либо электронный полупроводниковый усилитель, служащий для управления электродвигателем ГН (ЭД ГН) 11 стабилизатора вооружения (СВ) 12.
Электрические сигналы обратных связей по току и скорости вращения вала исполнительного электродвигателя ГН (ЭД ГН) 11 из усилителя мощности ГН (УМ-ГН) 10 через усилитель ГН (У-ГН) 9 поступают в модуль управления 8 блока управления (БУ) 7. Сигналы по току электродвигателя ГН (ЭД ГН) 11 и скорости вала электродвигателя ГН (ЭД ГН) 11 используются в алгоритме управления модуля управления 8 блока управления (БУ) 7, формирующем суммарный сигнал управления через усилитель ГН (У-ГН) 9 для усилителя мощности ГН (УМ-ГН) 10. Использование обратных связей позволяет поднять добротность контура (заданный коэффициент усиления), тем самым обеспечив требуемые параметры по точности отработки и стабилизации привода ГН в целом.
Электродвигатель ГН (ЭД ГН) 11 стабилизатора вооружения (СВ) 12 механически связан с редуктором ГН (Ред. ГН) 13 и через него поворачивает боевой модуль (БМ) 14 и установленное на нем вооружение (В) 15 в заданном задающим устройством стабилизации с датчиком положения независимого стабилизированного в пространстве инерциального объекта по ГН (ЗУС) 3 направлении. Датчик абсолютной угловой скорости ГН (ДУС-ГН) 16 жестко связан с установленным вооружением (В) 15 и электрически связан с модулем управления 8 блока управления (БУ) 7.
Для обеспечения резервного режима автономной стабилизации установленного вооружения в структуре программы модуля управления 8 блока управления (БУ) 7 предусмотрена функция цифрового интегратора привода ГН, служащего для преобразования цифрового сигнала полученного суммированием с заданными коэффициентами сигналов с пульта наведения оператора (ПН-О) 2 по ГН и датчика абсолютной угловой скорости по ГН (ДУС-ГН) 16 в ошибку (абсолютное угловое положение) привода ГН, используемую для автономной стабилизации установленного вооружения (В) 15, в случае отключения или выхода из строя задающего устройства стабилизации (ЗУС) 3 по ГН.
Датчик положения боевого модуля (ДПБМ) 17 механически связан с боевым модулем (БМ) 14 и электрически связан со второй последовательной шиной (ПШ2) 18 типа RS422, которая в свою очередь электрически связана с блоком сопряжения 6 блока управления (БУ) 7.
Баллистический вычислитель (БВ) 4 прицельного комплекса (ПК) 1 электрически связан через третью последовательную шину (ПШ3) 19 типа RS422 с датчиком ветра (ДВ) 20, датчиком температуры заряда (ДТЗ) 21, датчиком температуры воздуха (ДТВ) 22, датчиком атмосферного давления (ДАД) 23 и служит для формирования баллистической поправки в плоскости ГН СУСВ.
Для формирования внешнего целеуказания в плоскости ГН электрический сигнал с радиостанции цифровой (РЦ) 24 через четвертую последовательную шину (ПШ4) 25, представляющую собой последовательную шину типа RS422, связан с картографом (К) 26 системы навигации (СН) 27. В свою очередь картограф (К) 26 электрически связан с модулем антенным (МА) 28, предназначенным для работы со спутниковыми системами GPS и ГЛОНАСС, а также с датчиком наклона и курса (ДНК) 29 и датчиком пути (ДП) 30 системы навигации (СН) 27. Картограф (К) 26 системы навигации (СН) 27 с помощью информации, полученной от радиостанции цифровой (РЦ) 24, модуля антенного (МА) 28, датчика наклона и курса (ДНК) 29 и датчика пути (ДП) 30 вырабатывает сигнал, который через пятую последовательную шину (ПШ5) 31 типа CAN и RS422 электрически связан с блоком сопряжения 6, и через него с модулем управления 8 блока управления (БУ) 7 стабилизатора вооружения (СВ) 12. Таким образом, сигнал с внешнего целеуказания и сигнал с датчика положения боевого модуля (ДПБМ) 17 позволяют выработать сигнал наведения, который через блок сопряжения 6 и через первую последовательную шину (ПШ1) 5 поступает в (ЗУС) 3, где происходит отклонение линии визирования (прицельной марки) прицельного комплекса (ПК) 1 в плоскости ГН на соответствующий абсолютным координатам целеуказания угол. Соответственно отклонение линии визирования (прицельной марки) прицельного комплекса (ПК) 1 в плоскости ГН отображается в качестве ошибки ГН в модуле управления 8 блока управления (БУ) 7 стабилизатора вооружения (СВ) 12 и с учетом одновременно угловой баллистической поправки по ГН отрабатывается СУСВ через поворот боевого модуля (БМ) 14 в сторону уменьшения, полученной таким образом ошибки по ГН. СУСВ также обеспечивает и ручное введение координат цели по ГН при помощи встроенной в картограф (К) 26 клавиатуры управления.
Блоки, используемые в приводе ГН, такие как - прицельный комплекс (ПК) 1, пульт наведения оператора (ПН-О) 2, задающее устройство стабилизации (ЗУС) 3, баллистический вычислитель (БВ) 4, первая последовательная шина (ПШ1) 5, блок сопряжения 6 и модуль управления 8 блока управления (БУ) 7, а также третья последовательная шина (ПШ3) 19, датчик ветра (ДВ) 20, датчик температуры заряда (ДТЗ) 21, датчик температуры воздуха (ДТВ) 22, датчик атмосферного давления (ДАД) 23, радиостанция цифровая (РЦ) 24, четвертая последовательная шина (ПШ4) 25, картограф (К) 26, модуль антенный (МА) 28, а также датчик наклона и курса (ДНК) 29 и датчик пути (ДП) 30 системы навигации (СН) 27 работают совместно и с приводом ВН.
Привод ВН содержит прицельный комплекс (ПК) 1, включающий пульт наведения оператора (ПН-О) 2 с датчиком положения рукоятки по ВН, задающее устройство стабилизации с датчиком положения независимого стабилизированного в пространстве инерциального объекта по ВН (ЗУС) 3, электрически связанное с пультом наведения оператора (ПН-О) 2 и с баллистическим вычислителем (БВ) 4. Электрические сигналы пульта наведения оператора (ПН-О) 2 по ВН, задающего устройства стабилизации (ЗУС) 3, баллистического вычислителя (БВ) 4 электрически связаны с первой последовательной шиной (ПШ1) 5, представляющей собой дублированную линию передачи сигналов последовательного протокола типа CAN и RS422, и через (ПШ1) 5 электрически связаны с блоком сопряжения 6 блока управления (БУ) 7, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422, который в свою очередь связан с модулем управления 8, представляющим собой процессорный модуль для обработки цифровых и аналоговых сигналов. В свою очередь модуль управления 8 связан с усилителем ВН (У-ВН) 32 блока управления (БУ) 7, представляющим собой усилитель аналогового сигнала широтно-импульсной модуляции (ШИМ). Усилитель ВН (У-ВН) 32 блока управления (БУ) 7 связан с гидроприводом ВН (ГП) 33, который в свою очередь электрически связан с бортовой сетью ОВН и механически связан с боевым модулем (БМ) 14 и установленным на нем вооружением (В) 15, и служит для поворота установленного вооружения (В) 15 в плоскости ВН в заданном задающим устройством стабилизации с датчиком положения независимого стабилизированного в пространстве инерциального объекта по ВН (ЗУС) 3 направлении.
Датчик абсолютной угловой скорости ВН (ДУС-ВН) 34 жестко связан с установленным вооружением (В) 15 и электрически связан с модулем управления 8 блока управления (БУ) 7.
Для обеспечения резервного режима автономной стабилизации установленного вооружения в структуре программы модуля управления 8 блока управления (БУ) 7 предусмотрена функция цифрового интегратора привода ВН, служащего для преобразования цифрового сигнала, полученного суммированием с заданными коэффициентами сигналов с пульта наведения оператора (ПН-О) 2 по ВН и датчика абсолютной угловой скорости по ВН (ДУС-ВН) 34, в ошибку (абсолютное угловое положение) привода ВН, используемую для автономной стабилизации установленного вооружения (В) 15, в случае отключения или выхода из строя задающего устройства стабилизации (ЗУС) 3 по ВН.
Баллистический вычислитель (БВ) 4 прицельного комплекса (ПК) 1 электрически связан через третью последовательную шину (ПШ3) 19 типа RS422 с датчиком ветра (ДВ) 20, датчиком температуры заряда (ДТЗ) 21, датчиком температуры воздуха (ДТВ) 22, датчиком атмосферного давления (ДАД) 23 и датчиком положения вооружения (ДПВ) 35 прицельного комплекса (ПК) 1 и служит для формирования баллистической поправки в плоскости ВН СУСВ.
Датчик положения вооружения (ДПВ) 35 в свою очередь механически связан с установленным вооружением (В) 15. Датчик положения вооружения (ДПВ) 35, дополнительно через баллистический вычислитель (БВ) 4, электрически связан через первую последовательную шину (ПШ1) 5 и блок сопряжения 6 с модулем управления 8 блока управления (БУ) 7.
Для формирования внешнего целеуказания в плоскости ВН электрический сигнал с радиостанции цифровой (РЦ) 24 через четвертую последовательную шину (ПШ4) 25, представляющую собой последовательную шину типа RS422, связан с картографом (К) 26 системы навигации (СН) 27. В свою очередь картограф (К) 26 электрически связан с модулем антенным (МА) 28, предназначенным для работы со спутниковыми системами GPS и ГЛОНАСС, а также с датчиком наклона и курса (ДНК) 29 и датчиком пути (ДП) 30 системы навигации (СН) 27. Картограф (К) 26 системы навигации (СН) 27 с помощью информации, полученной от радиостанции цифровой (РЦ) 24, модуля антенного (МА) 28, датчика наклона и курса (ДНК) 29 и датчика пути (ДП) 30 вырабатывает сигнал, который через пятую последовательную шину (ПШ5) 31 типа CAN и RS422 электрически связан с блоком сопряжения 6 и через него с модулем управления 8 блока управления (БУ) 7 стабилизатора вооружения (СВ) 12. Таким образом, сигнал с внешнего целеуказания и сигнал с датчика положения вооружения (ДПВ) 35 позволяют выработать сигнал наведения, который через блок сопряжения 6 и через первую последовательную шину (ПШ1) 5 поступает в (ЗУС) 3, где происходит отклонение линии визирования (прицельной марки) прицельного комплекса (ПК) 1 в плоскости ВН, на соответствующий абсолютным координатам целеуказания угол. Соответственно отклонение линии визирования (прицельной марки) прицельного комплекса (ПК) 1 в плоскости ВН отображается в качестве ошибки ВН в модуле управления 8 блока управления (БУ) 7 стабилизатора вооружения (СВ) 12 с учетом одновременно и угловой баллистической поправки по ВН и отрабатывается СУСВ, через поворот установленного вооружения (В) 15 в сторону уменьшения, полученной таким образом ошибки по ВН. СУСВ также обеспечивает и ручное введение координат цели по ВН при помощи встроенной в картограф (К) 26 клавиатуры управления.
Блоки, используемые в приводе ВН, такие как - прицельный комплекс (ПК) 1, пульт наведения оператора (ПН-О) 2, задающее устройство стабилизации (ЗУС) 3, баллистический вычислитель (БВ) 4, первая последовательная шина (ПШ1) 5, блок сопряжения 6 и модуль управления 8 блока управления (БУ) 7, а также третья последовательная шина (ПШ3) 19, датчик ветра (ДВ) 20, датчик температуры заряда (ДТЗ) 21, датчик температуры воздуха (ДТВ) 22, датчик атмосферного давления (ДАД) 23, цифровая радиостанция (РЦ) 24, четвертая последовательная шина (ПШ4) 25, картограф (К) 26, модуль антенный (МА) 28, а также датчик наклона и курса (ДНК) 29 и датчик пути (ДП) 30 системы навигации (СН) 27, работают совместно и с приводом ГН.
Большинство новых элементов заявляемой системы реализованы как часть программного обеспечения модулей блока управления, усилителя мощности и датчиков, при этом обработка получаемых и передаваемых данных осуществляется контроллерами вычисления сигналов управления, положения и скорости, состоящих в основном из:
- формирователей сигналов последовательных шин типа CAN, RS422, SPI, I2S;
- формирователя сигнала широтно-импульсного модулятора;
- дискретного ввода - вывода;
- силовых транзисторных ключей.
Процедура вычисления модулем управления блока управления (БУ) сигналов управления приводами выполнена в виде подпрограмм со звеньями коррекции по ГН и ВН, представляющими собой цифровые фильтры 1-го и 2-го порядка, полученные билинейным преобразованием аналоговых прототипов, причем частота обработки полученных контроллером модуля управления блока управления данных и выдача им сигналов управления приводами на усилитель мощности ГН и гидропривод ВН будет определяться заданной частотой циклов обработки сигналов блоком управления и частотой обмена по последовательным шинам с прицельным комплексом, системой навигации, датчиками и усилителем мощности ГН и гидроприводом ВН.
Выходной каскад усилителя мощности может быть выполнен по мостовой схеме, построенной на транзисторных сборках управляемых в режиме широтно-импульсной модуляции (ШИМ) сигналами ШИМ, формируемыми контроллером ШИМ и усиленными драйверами ШИМ.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию» пер.с англ.- М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993).
Таким образом, заявляемая в качестве изобретения система управления и стабилизации вооружения позволяет:
- расширить функциональные возможности СУСВ, повысить ее эксплутационную интероперабельность, что позволяет улучшить эксплуатационную эргономику в части оперативной настройки и диагностики входящих подсистем с возможностью передачи полученных и обработанных данных в единый командный центр при работе в составе ЕСУТЗ;
- обеспечить независимую двухплоскостную стабилизацию линии визирования по ГН и ВН, повысив при этом точность стабилизации по ВН и ГН, что позволяет вести точную стрельбу на большие дальности по наблюдаемой цели вероятного противника;
- повысить точность решения баллистической задачи, как при стрельбе с закрытой позиции, так при стрельбе по наблюдаемой цели;
- обеспечить решение задачи стрельбы с закрытых позиций по ненаблюдаемой цели, что в сумме с выше описанными преимуществами, позволяет уничтожить цель с первого выстрела;
- повысить внутренние эксплутационные показатели СУСВ, что обеспечивает качество ее работы в процессе эксплуатации в течении всего жизненного цикла ОВН.
Таким образом, поставленные в заявке технические задачи достигнуты.
Приведенные в описании технические преимущества, целесообразность и надежность системы, реализованной по заявляемой структурной схеме, подтверждены испытаниями опытного образца модернизированного Т-72Б на испытательной базе ОАО «61БТРЗ» г. Санкт-Петербург, а также стрельбовыми испытаниями на территории в/ч 02511.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2789421C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |

Изобретение относится к области вооружения и военной техники, в частности к системам управления и стабилизации вооружения (СУСВ) боевых машин типа танков, БМП, БТР, БРДМ и т.п., работающим совместно со стабилизатором вооружения. Технический результат - расширение функциональных возможностей. Для этого в систему управления и стабилизации вооружения согласно изобретению дополнительно введены с соответствующими связями с другими элементами СУСВ радиостанция цифровая, система навигации, включающая в себя модуль антенный, датчик наклона и курса, датчик пути, картограф; первая последовательная шина, вторая последовательная шина, в прицельный комплекс дополнительно введены задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по вертикали и горизонтали наведения (ВН и ГН), баллистический вычислитель, датчик скорости ветра, датчик температуры заряда, датчик температуры воздуха, датчик атмосферного давления, датчик положения установленного вооружения по ВН, третья последовательная шина; в блок управления дополнительно введен блок сопряжения; датчик положения боевого модуля, четвертая последовательная шина, пятая последовательная шина, датчик абсолютной угловой скорости по ГН. 2 ил.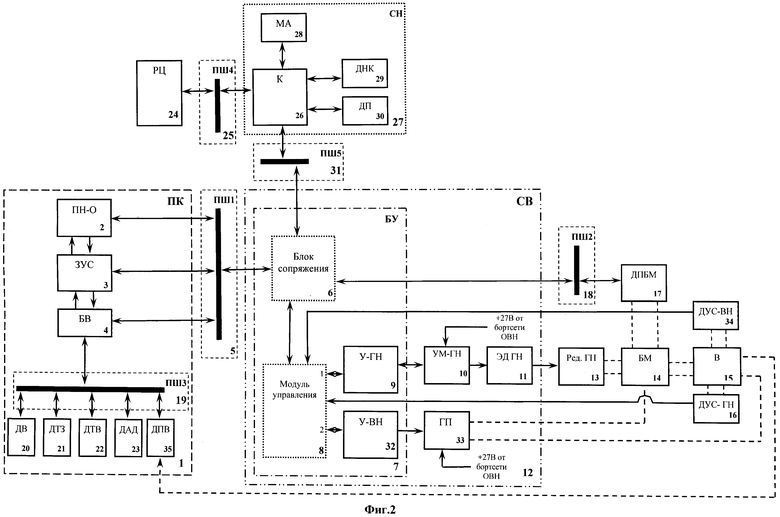
Система управления и стабилизации вооружения, содержащая установленное вооружение с закрепленным на нем датчиком абсолютной угловой скорости по ВН стабилизатора вооружения, боевой модуль (башню) с установленным на нем вооружением, стабилизатор вооружения, прицельный комплекс, блок управления стабилизатора вооружения, электродвигатель ГН стабилизатора вооружения, редуктор ГН, механически связанный с боевым модулем и электродвигателем ГН стабилизатора вооружения, усилитель мощности ГН стабилизатора вооружения, электрически связанного с бортсетью объекта военного назначения, электродвигателем ГН и усилителем ГН блока управления стабилизатора вооружения, гидропривод ВН стабилизатора вооружения, механически связанный с боевым модулем, установленным вооружением и электрически связанный с бортсетью объекта военного назначения и усилителем ВН блока управления стабилизатора вооружения, модуль управления блока управления стабилизатора вооружения, электрически связанный с датчиком абсолютной угловой скорости по ВН и усилителями ГН и ВН блока управления стабилизатора вооружения, пульт наведения оператора прицельного комплекса, отличающаяся тем, что в нее дополнительно введены радиостанция цифровая, система навигации, включающая в себя модуль антенный, датчик наклона и курса, датчик пути, картограф; первая последовательная шина, вторая последовательная шина, в прицельный комплекс дополнительно введены задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и ГН, баллистический вычислитель, датчик скорости ветра, датчик температуры заряда, датчик температуры воздуха, датчик атмосферного давления, датчик положения установленного вооружения по ВН, третья последовательная шина; в блок управления дополнительно введен блок сопряжения; датчик положения боевого модуля, четвертая последовательная шина, пятая последовательная шина, датчик абсолютной угловой скорости по ГН, при этом задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и ГН электрически связано с пультом наведения оператора и баллистическим вычислителем, задающее устройство стабилизации, пульт наведения оператора и баллистический вычислитель, в свою очередь, электрически связаны с первой последовательной шиной, датчик положения боевого модуля механически связан с боевым модулем и электрически связан со второй последовательной шиной, а датчик угловой скорости ГН механически связан с установленным вооружением и электрически связан с модулем управления блока управления стабилизатора вооружения, при этом баллистический вычислитель электрически связан с третьей последовательной шиной, которая, в свою очередь, электрически связана с датчиком скорости ветра, датчиком температуры заряда, датчиком температуры воздуха, датчиком атмосферного давления и датчиком положения установленного вооружения по ВН, механически связанным с установленным вооружением, при этом радиостанция цифровая электрически связана с четвертой последовательной шиной, которая электрически связана с картографом системы навигации, картограф, в свою очередь, электрически связан с модулем антенным, датчиком наклона и курса, датчиком пути и пятой последовательной шиной, в свою очередь, первая последовательная шина, вторая последовательная шина и пятая последовательная шина электрически связаны с блоком сопряжения блока управления, который дополнительно электрически связан с модулем управления блока управления стабилизатора вооружения, при этом, с одной стороны, первый выход модуля управления блока управления электрически связан с усилителем ГН, который, в свою очередь, электрически связан с усилителем мощности ГН, вращающим вал электродвигателя ГН, который через редуктор ГН поворачивает боевой модуль с установленным вооружением, а с ним и вал датчика положения боевого модуля в заданном угловом направлении, с другой стороны, второй выход модуля управления блока управления электрически связан с усилителем ВН, , в свою очередь, электрически связан с гидроприводом ВН, поворачивающим установленное вооружение в плоскости ВН, а с ним и вал датчика положения вооружения в заданном угловом направлении.
| А.В | |||
| БЕЗЛЮДЬКО, В.В | |||
| УСОВИЧ, Р.И | |||
| ШАРИПОВ, И.Н | |||
| ЯНКОВСКИЙ, СВ | |||
| ЮРКО В.Р | |||
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2009 |
|
RU2387943C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2010 |
|
RU2430326C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2002 |
|
RU2210715C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2003 |
|
RU2235270C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2003 |
|
RU2239768C1 |

