Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности навигационной аппаратуры потребителя (НАП) воздушного судна (ВС).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ повышения целостности выходных сигналов бортовых спутниковых навигационных приемников (см., например, патент на изобретение №2541691 от 20 февраля 2015 г.), характеризующийся использованием на борту оцениваемого в полете ВС, как и на ВС, находящихся в полете в близи оцениваемого ВС, спутникового навигационного приемника, представляющего собой НАП, вычисляющую геометрическую высоту, штатного барометрического высотомера и штатного оборудования автоматического зависимого наблюдения (АЗН), на оцениваемом ВС получают информацию о барометрической и геометрической высоте от N окружающих ВС по каналу АЗН в ограниченном диапазоне высот, на оцениваемом ВС вычисляют разницу между барометрической и геометрической высотами для каждого из N окружающих ВС и осредняют полученные значения, получают для оцениваемого ВС разницу между его барометрической и геометрической высотами, а далее сопоставляют осредненную разницу высоте разницей высот данного ВС, если при этом сопоставлении разница указанных значений превышает допуск, то формируют сигнал о неработоспособности (неисправности) НАП оцениваемого ВС.
Одним из недостатков прототипа является снижение достоверности контроля работоспособности НАП оцениваемого ВС в условиях нарушения целостности навигационного поля, приводящего к некорректному измерению горизонтальных составляющих координат оцениваемого ВС контролируемой НАП. Под оцениваемым ВС понимается ВС, на котором установлена контролируемая НАП. Под контролируемой НАП понимается НАП, работоспособность которой контролируется.
Техническим результатом изобретения является повышение достоверности контроля работоспособности НАП оцениваемого ВС.
Указанный результат достигается тем, что в известном способе на стороне каждого n-го ВС, где  N - число ВС, взаимодействующих с оцениваемым ВС, с использованием информации, содержащейся в поступающих на НАП спутниковых сигналах, формируют значения
N - число ВС, взаимодействующих с оцениваемым ВС, с использованием информации, содержащейся в поступающих на НАП спутниковых сигналах, формируют значения  собственных пространственных координат n-го ВС в k-е моменты времени в заданной прямоугольной системе координат OXYZ, определяют моменты времени tni передачи специальных информационных посылок (СИП), определяют значения
собственных пространственных координат n-го ВС в k-е моменты времени в заданной прямоугольной системе координат OXYZ, определяют моменты времени tni передачи специальных информационных посылок (СИП), определяют значения  собственных пространственных координат n-го ВС для каждого tni, формируют и передают по каналу системы обмена данными (СОД) в определенные моменты времени tni СИП
собственных пространственных координат n-го ВС для каждого tni, формируют и передают по каналу системы обмена данными (СОД) в определенные моменты времени tni СИП  содержащие момент времени tni и значения
содержащие момент времени tni и значения  координат n-го ВС, на стороне оцениваемого ВС с использованием информации, содержащейся в поступающих на контролируемую НАП спутниковых сигналах, формируют значения
координат n-го ВС, на стороне оцениваемого ВС с использованием информации, содержащейся в поступающих на контролируемую НАП спутниковых сигналах, формируют значения  собственных пространственных координат оцениваемого ВС в j -е моменты времени в заданной прямоугольной системе координат OXYZ, принимают СИП
собственных пространственных координат оцениваемого ВС в j -е моменты времени в заданной прямоугольной системе координат OXYZ, принимают СИП  от n-х ВС и фиксируют моменты времени t1ni их приема, определяют значения
от n-х ВС и фиксируют моменты времени t1ni их приема, определяют значения  собственных пространственных координат оцениваемого ВС для каждого tni, с использованием значений t1ni и tni определяют задержки Δtni передаваемых СИП для каждого n, с использованием задержек Δtnj определяют основные оценки
собственных пространственных координат оцениваемого ВС для каждого tni, с использованием значений t1ni и tni определяют задержки Δtni передаваемых СИП для каждого n, с использованием задержек Δtnj определяют основные оценки расстояний между оцениваемым ВС и каждым n-м ВС, с использованием значений координат
расстояний между оцениваемым ВС и каждым n-м ВС, с использованием значений координат  и
и  определяют контрольные оценки
определяют контрольные оценки  расстояний между оцениваемым ВС и каждым n-м ВС, с использованием основных
расстояний между оцениваемым ВС и каждым n-м ВС, с использованием основных  и контрольных оценок
и контрольных оценок  расстояний определяют модули Mni их разностей, сравнивают модули Mni с заданным пороговым значением h для каждого n, если модули Mni для каждого n не превышают заданное пороговое значение h, то формируют решение о том, что контролируемая НАП является работоспособной, в противном случае формируют решение о том, что контролируемая НАП является неработоспособной.
расстояний определяют модули Mni их разностей, сравнивают модули Mni с заданным пороговым значением h для каждого n, если модули Mni для каждого n не превышают заданное пороговое значение h, то формируют решение о том, что контролируемая НАП является работоспособной, в противном случае формируют решение о том, что контролируемая НАП является неработоспособной.
Сущность изобретения заключается в том, что решение о неработоспособности контролируемой НАП оцениваемого ВС формируется в результате выявления несоответствия основной и контрольной оценок расстояний между оцениваемым ВС и каждым из взаимодействующих ВС. При этом основная оценка расстояния формируется по задержке СИП, передаваемой в определенные моменты времени со стороны каждого из взаимодействующих ВС на оцениваемое ВС, а контрольная оценка - по передаваемым в данных СИП значениям пространственных координат, взаимодействующих ВС и значениям пространственных координат оцениваемого ВС, формируемых НАП. Это позволяет, в отличие от прототипа, учесть случаи некорректного измерения контролируемой НАП горизонтальных составляющих координат оцениваемого ВС и, как следствие, повысить достоверность контроля ее работоспособности в целом в условиях нарушения целостности навигационного поля.
Данный способ включает в себя следующие этапы:
1 На стороне каждого n-го ВС, взаимодействующего с оцениваемым ВС:
1.1 Формирование значений  собственных пространственных координат в k-е моменты времени tnk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих на бортовую НАП.
собственных пространственных координат в k-е моменты времени tnk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих на бортовую НАП.
1.2 Определение моментов времени tni передачи СИП в соответствии с выражением

где tn1 - заданный первый момент времени передачи СИП от n-го ВС, i=0,1,2,3, …, Δt - установленный интервал времени между моментами времени передачи СИП.
1.3 Определение значений  собственных пространственных координат для каждого tni в соответствии с выражением
собственных пространственных координат для каждого tni в соответствии с выражением

1.4 Формирование и передача по каналу СОД в определенные моменты времени tni СИП  содержащей момент времени tni передачи данной посылки и значения
содержащей момент времени tni передачи данной посылки и значения  пространственных координат n-го ВС в заданной прямоугольной системе координат OXYZ.
пространственных координат n-го ВС в заданной прямоугольной системе координат OXYZ.
2 На стороне оцениваемого ВС:
2.1 Формирование значений  собственных пространственных координат в j-e моменты времени tj в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих на контролируемую НАП.
собственных пространственных координат в j-e моменты времени tj в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих на контролируемую НАП.
2.2 Прием СИП  от n-х ВС и фиксация моментов времени t1ni их приема.
от n-х ВС и фиксация моментов времени t1ni их приема.
2.3 Определение значений  собственных пространственных координат для каждого tni в соответствии с выражением
собственных пространственных координат для каждого tni в соответствии с выражением

2.4 Определение задержек Δtni передаваемых СИП для каждого n в соответствии с выражением

2.5 Определение основных оценок  расстояний между оцениваемым ВС и каждым n-м ВС в соответствии с выражением
расстояний между оцениваемым ВС и каждым n-м ВС в соответствии с выражением

где ν=3⋅108 м/с - скорость распространения радиосигнала.
2.6 Определение контрольных оценок  расстояний между оцениваемым ВС и n-ми ВС в соответствии с выражением
расстояний между оцениваемым ВС и n-ми ВС в соответствии с выражением

2.7 Определение модулей Mni разностей основных  и контрольных оценок
и контрольных оценок  расстояний между оцениваемым ВС и n-ми ВС в соответствии с выражением
расстояний между оцениваемым ВС и n-ми ВС в соответствии с выражением 
2.8 Формирование решения о работоспособности или неработоспособности контролируемой НАП в соответствии с выражением

где

здесь qi=0 - контролируемая НАП является неработоспособной; qi=1 -контролируемая НАП является работоспособной; h - заданное пороговое значение.
В соответствии с пунктом 2.8, решение о том, что контролируемая НАП является работоспособной формируется в том случае, если модули Mni для каждого n не превышают заданное пороговое значение h, в противном случае формируется решение о том, что контролируемая НАП является неработоспособной.
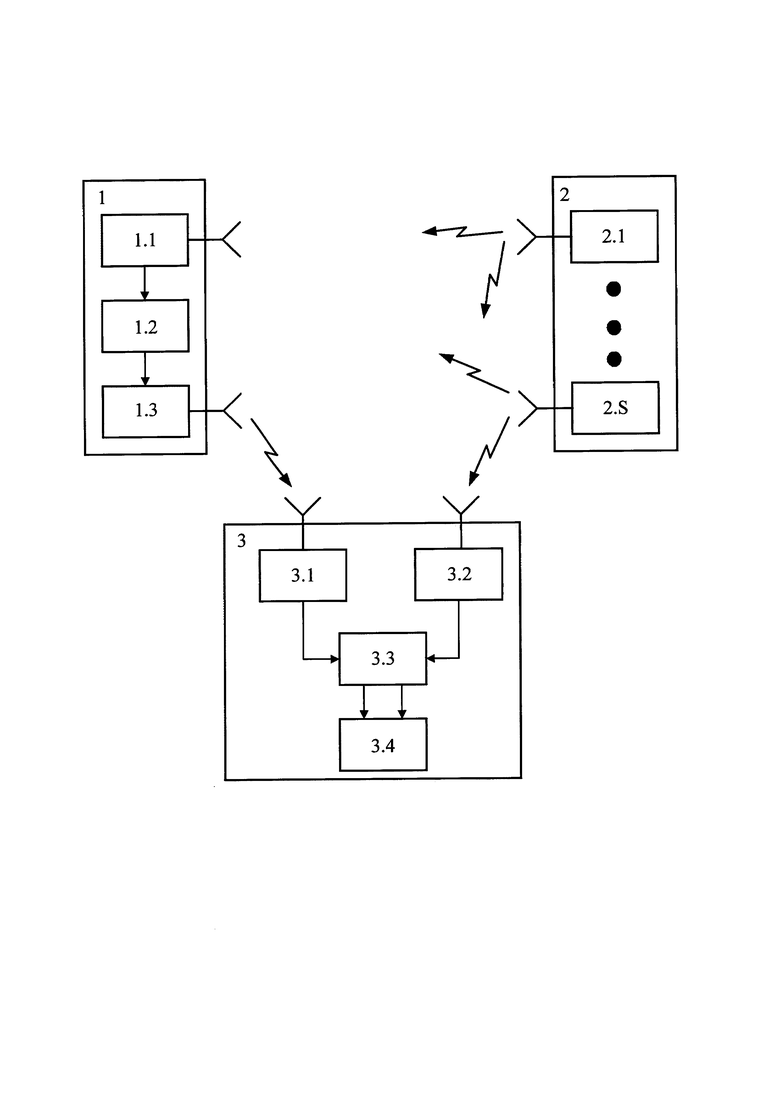
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре 1, где обозначено: 1 - n-е ВС, взаимодействующее с оцениваемым ВС; 1.1 - НАП; 1.2 - блок согласования (БС); 1.3 - передатчик СОД; 2 - группировка S видимых спутников спутниковой радионавигационной системы (СРНС); 2.1 - 1-й спутник СРНС; 2.S - S-й спутник СРНС, где S - число видимых спутников СРНС; 3 - оцениваемое ВС; 3.1 - приемник СОД; 3.2 - контролируемая НАП; 3.3 - БС; 3.4 - блок контроля работоспособности (БКР).
НАП 1.1 предназначена для формирования значений  собственных пространственных координат n-го ВС в k-е моменты времени tk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. БС 1.2 предназначен для определения моментов времени tni передачи СИП и для определения значений
собственных пространственных координат n-го ВС в k-е моменты времени tk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. БС 1.2 предназначен для определения моментов времени tni передачи СИП и для определения значений  собственных пространственных координат на данные моменты времени tni. Передатчик СОД 1.3 предназначен для формирования и передачи СИП
собственных пространственных координат на данные моменты времени tni. Передатчик СОД 1.3 предназначен для формирования и передачи СИП  Приемник СОД 3.1 предназначен для приема СИП
Приемник СОД 3.1 предназначен для приема СИП  от n-х ВС и фиксации моментов времени t1ni их приема. Контролируемая НАЛ 3.2 предназначена для формирования значений
от n-х ВС и фиксации моментов времени t1ni их приема. Контролируемая НАЛ 3.2 предназначена для формирования значений  собственных пространственных координат оцениваемого ВС в j-е моменты времени tj. в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. БС 3.3 предназначен для определения значений
собственных пространственных координат оцениваемого ВС в j-е моменты времени tj. в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. БС 3.3 предназначен для определения значений  собственных пространственных координат для каждого tni. БКР 3.4 предназначен для обработки информации, поступающей от БС 3.3 и формирования решения о работоспособности или неработоспособности контролируемой НАП 3.2.
собственных пространственных координат для каждого tni. БКР 3.4 предназначен для обработки информации, поступающей от БС 3.3 и формирования решения о работоспособности или неработоспособности контролируемой НАП 3.2.
Комплекс работает следующим образом. На стороне каждого n-го ВС 1, взаимодействующего с оцениваемым ВС 3, НАП 1.1 формирует значения  собственных пространственных координат n-го ВС в k-e моменты времени tk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. Значения
собственных пространственных координат n-го ВС в k-e моменты времени tk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. Значения  с выхода НАП 1.1 поступают на вход БС 1.2. БС 1.2 определяет моменты времени tni передачи СИП в соответствии с выражением (1) и определяет значения
с выхода НАП 1.1 поступают на вход БС 1.2. БС 1.2 определяет моменты времени tni передачи СИП в соответствии с выражением (1) и определяет значения  собственных пространственных координат n-го ВС на данные моменты времени tni в соответствии с выражением (2). Значения tni и
собственных пространственных координат n-го ВС на данные моменты времени tni в соответствии с выражением (2). Значения tni и  с выхода БС 1.2 поступают на вход передатчика СОД 1.3. Передатчик СОД 1.3 формирует СИП
с выхода БС 1.2 поступают на вход передатчика СОД 1.3. Передатчик СОД 1.3 формирует СИП  и передает ее в определенные моменты времени tni, через ненаправленную антенну. На стороне оцениваемого ВС 3. Приемник СОД 3.1 принимает СИП
и передает ее в определенные моменты времени tni, через ненаправленную антенну. На стороне оцениваемого ВС 3. Приемник СОД 3.1 принимает СИП  от n-х ВС и фиксирует моменты времени t1ni их приема. Значения t1ni, tni и
от n-х ВС и фиксирует моменты времени t1ni их приема. Значения t1ni, tni и  с выхода приемника СОД 3.1 поступают через БС 3.3 на вход БКР 3.4. Контролируемая НАП 3.2 формирует значения
с выхода приемника СОД 3.1 поступают через БС 3.3 на вход БКР 3.4. Контролируемая НАП 3.2 формирует значения  собственных пространственных координат оцениваемого ВС в j -е моменты времени tj. в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1-2.S. Значения
собственных пространственных координат оцениваемого ВС в j -е моменты времени tj. в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1-2.S. Значения  с выхода контролируемой НАП 3.2 поступают на вход БС 3.3. БС 3.3 определяет значения
с выхода контролируемой НАП 3.2 поступают на вход БС 3.3. БС 3.3 определяет значения  собственных пространственных координат для каждого tni в соответствии с выражением (3). Значения
собственных пространственных координат для каждого tni в соответствии с выражением (3). Значения  с выхода БС 3.3 поступают на вход БКР 3.4. БКР 3.4 обрабатывает поступающую с выхода БС 3.3 информацию в соответствии с выражениями (4)-(7) и формирует решение о работоспособности или неработоспособности контролируемой НАП 3.2 в соответствии с выражениями (8)-(9).
с выхода БС 3.3 поступают на вход БКР 3.4. БКР 3.4 обрабатывает поступающую с выхода БС 3.3 информацию в соответствии с выражениями (4)-(7) и формирует решение о работоспособности или неработоспособности контролируемой НАП 3.2 в соответствии с выражениями (8)-(9).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ контроля работоспособности НАП ВС, сущность которого заключается в том, что решение о неработоспособности НАП оцениваемого ВС формируется в результате выявления несоответствия основной и контрольной оценок расстояний между оцениваемым ВС и каждым из взаимодействующих ВС. При этом основная оценка расстояния формируется по задержке СИП, передаваемой в определенные моменты времени со стороны каждого из взаимодействующих ВС на оцениваемое ВС, а контрольная оценка - по передаваемым в данных СИП значениям пространственных координат взаимодействующих ВС и значениям пространственных координат оцениваемого ВС, формируемых НАП.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если решение о неработоспособности НАП оцениваемого ВС формировать в результате выявления несоответствия основной и контрольной оценок расстояний между оцениваемым ВС и каждым из взаимодействующих ВС, при этом основную оценку расстояния формировать по задержке СИП, передаваемой в определенные моменты времени со стороны каждого из взаимодействующих ВС на оцениваемое ВС, а контрольную оценку - по передаваемым в данных СИП значениям пространственных координат взаимодействующих ВС и значениям пространственных координат оцениваемого ВС, формируемых НАП, то это приведет к повышению достоверности контроля работоспособности НАП оцениваемого ВС.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности навигационной аппаратуры потребителя (НАП) воздушного судна (ВС). Сущность изобретения заключается в том, что решение о неработоспособности контролируемой НАП оцениваемого ВС формируется в результате выявления несоответствия основной и контрольной оценок расстояний между оцениваемым ВС и каждым из взаимодействующих ВС. При этом основная оценка расстояния формируется по задержке СИП, передаваемой в определенные моменты времени со стороны каждого из взаимодействующих ВС на оцениваемое ВС, а контрольная оценка - по передаваемым в данных СИП значениям пространственных координат взаимодействующих ВС и значениям пространственных координат оцениваемого ВС, формируемых НАП. Это позволяет, в отличие от прототипа, учесть случаи некорректного измерения контролируемой НАП горизонтальных составляющих координат оцениваемого ВС и, как следствие, повысить достоверность контроля ее работоспособности в целом в условиях нарушения целостности навигационного поля. Техническим результатом изобретения является повышение достоверности контроля работоспособности НАП оцениваемого ВС. 1 ил.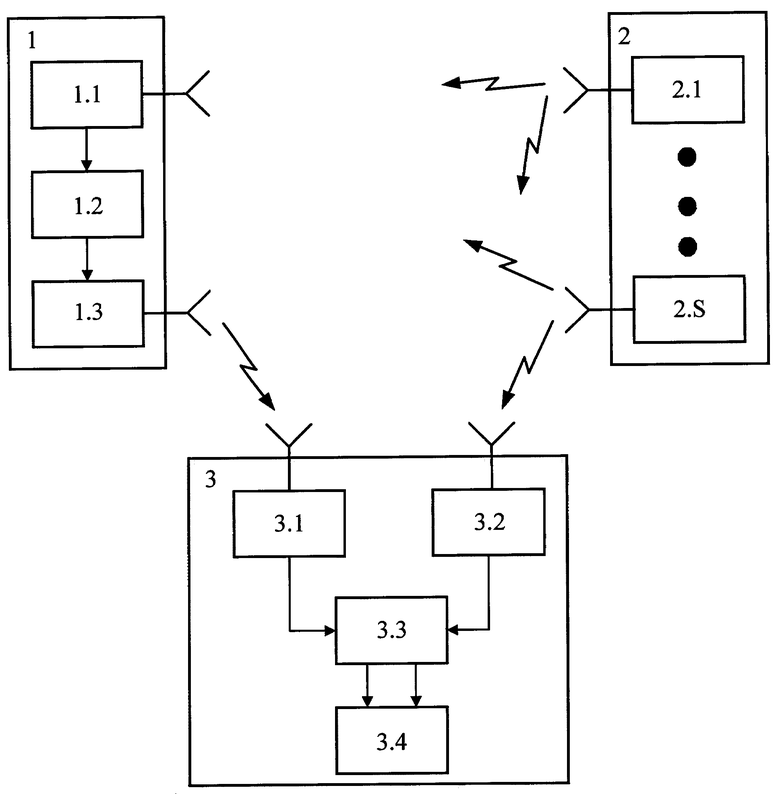
Способ контроля работоспособности навигационной аппаратурой потребителя (НАП) воздушного судна (ВС), основанный на использовании информации, передаваемой со стороны N воздушных судов, оборудованных НАП и взаимодействующих с оцениваемым ВС в целях контроля работоспособности установленной на нем контролируемой НАП, отличающийся тем, что на стороне каждого n-го ВС, взаимодействующего с оцениваемым ВС, где  с использованием информации, содержащейся в поступающих на его НАП спутниковых сигналах, формируют значения
с использованием информации, содержащейся в поступающих на его НАП спутниковых сигналах, формируют значения  собственных пространственных координат n-го ВС в k-е моменты времени в заданной прямоугольной системе координат OXYZ, определяют моменты времени tni передачи специальных информационных посылок (СИП), определяют значения
собственных пространственных координат n-го ВС в k-е моменты времени в заданной прямоугольной системе координат OXYZ, определяют моменты времени tni передачи специальных информационных посылок (СИП), определяют значения  собственных пространственных координат n-го ВС для каждого tni, формируют и передают по каналу системы обмена данными в определенные моменты времени tni СИП
собственных пространственных координат n-го ВС для каждого tni, формируют и передают по каналу системы обмена данными в определенные моменты времени tni СИП  содержащие момент времени tni и значения
содержащие момент времени tni и значения  координат n-го ВС, на стороне оцениваемого ВС с использованием информации, содержащейся в поступающих на контролируемую НАП спутниковых сигналах, формируют значения
координат n-го ВС, на стороне оцениваемого ВС с использованием информации, содержащейся в поступающих на контролируемую НАП спутниковых сигналах, формируют значения  собственных пространственных координат оцениваемого ВС в j-e моменты времени в заданной прямоугольной системе координат OXYZ, принимают СИП
собственных пространственных координат оцениваемого ВС в j-e моменты времени в заданной прямоугольной системе координат OXYZ, принимают СИП  от n-х ВС и фиксируют моменты времени t1ni их приема, определяют значения
от n-х ВС и фиксируют моменты времени t1ni их приема, определяют значения  собственных пространственных координат оцениваемого ВС для каждого tnj, с использованием значений t1ni и tni определяют задержки Δtni передаваемых СИП для каждого n, с использованием задержек Δtni определяют основные оценки
собственных пространственных координат оцениваемого ВС для каждого tnj, с использованием значений t1ni и tni определяют задержки Δtni передаваемых СИП для каждого n, с использованием задержек Δtni определяют основные оценки  расстояний между оцениваемым ВС и каждым n-м ВС, с использованием значений координат
расстояний между оцениваемым ВС и каждым n-м ВС, с использованием значений координат  и
и  определяют контрольные оценки
определяют контрольные оценки  расстояний между оцениваемым ВС и каждым n-м ВС, с использованием основных
расстояний между оцениваемым ВС и каждым n-м ВС, с использованием основных  и контрольных оценок
и контрольных оценок  расстояний определяют модули Мni их разностей, сравнивают модули Mni с заданным пороговым значением h для каждого n, если модули Mni для каждого n не превышают заданное пороговое значение h, то формируют решение о том, что контролируемая НАП является работоспособной, в противном случае формируют решение о том, что контролируемая НАП является неработоспособной.
расстояний определяют модули Мni их разностей, сравнивают модули Mni с заданным пороговым значением h для каждого n, если модули Mni для каждого n не превышают заданное пороговое значение h, то формируют решение о том, что контролируемая НАП является работоспособной, в противном случае формируют решение о том, что контролируемая НАП является неработоспособной.
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ВЫХОДНЫХ СИГНАЛОВ БОРТОВЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ ПРИЕМНИКОВ | 2013 |
|
RU2541691C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ, КУРСА И СКОРОСТИ ВОЗДУШНОГО СУДНА | 2012 |
|
RU2506541C2 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| Система формирования координат воздушного судна в условиях неполной и неточной навигационной информации | 2018 |
|
RU2682031C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

