Известен способ построения функционального дополнения наземного базирования к глобальной навигационной спутниковой системе (ГНСС), основанный на размещении на земной поверхности дополнительных радиостанций-аналогов бортовой радиоаппаратуры навигационных космических аппаратов (НКА) ГНСС, при этом формируют навигационные сообщения в соответствии со структурой навигационного сообщения ГНСС, излучают радионавигационные сигналы в направлении расположения потребителей навигационной информации [1, с.203].
Недостаток способа заключается в том, что территория земной поверхности, на которой может быть принято навигационное сообщение, излучаемое одной наземной радиостанцией, относительно невелика, так как радиоволны, применяемые для передачи навигационного сообщения, распространяются в прямой видимости от излучателя антенны. Поэтому при реализации такого способа построения функционального дополнения для охвата большой территории необходима установка большого количества наземных передатчиков.
Известен также способ построения функционального дополнения орбитального базирования к ГНСС, основанный на выведении двух НКА на высокоэллиптические орбиты с апогеем 47÷50 тыс.км и перигеем 25÷22 тыс.км [2, с.7-15]. Для реализации способа осуществляют следующую совокупность действий: размещают два НКА на высокоэллиптических орбитах; измеряют текущие навигационные параметры орбит НКА функционального дополнения с помощью наземных измерительных средств; передают измеренные параметры в центр наземного комплекса управления; определяют параметры орбиты и рассчитывают эфемериды каждого НКА функционального дополнения в наземном комплексе управления; передают эфемериды на борт НКА; формируют навигационные сообщения в соответствии с заданной структурой сообщения ГНСС; транслируют радионавигационные сигналы в направлении расположения потребителей навигационной информации. Система из 20 НКА, включающая два НКА на таких высокоэллиптических орбитах и 18 штатных НКА ГЛОНАСС, эквивалентна системе из 24 штатных НКА ГЛОНАСС. Признаком, характеризующим такой способ построения функционального дополнения, является размещении НКА на высокоэллиптических, а не на традиционных - околокруговых орбитах. Такое действие обеспечивает нахождение в зоне радиовидимости приземных потребителей навигационной информации не менее четырех НКА при меньшем суммарном количестве всей орбитальной группировки НКА.
Недостатки способа заключаются: во-первых, в том, что выведение на высокоэллиптические орбиты двух НКА требует значительных затрат ресурсов, превышающих расходы ресурсов на выведение на штатные орбиты ГНСС; во-вторых, применение орбит, отличающихся от орбит штатных космических аппаратов ГНСС, приводит к необходимости проведения трудоемких дополнительных исследований с целью определения схем навигационных измерений орбит, обеспечивающих требуемую точность расчета эфемеридной информации. Кроме того, полет НКА функционального дополнения по высокоэллиптической орбите приводит к необходимости управления ориентацией космического аппарата и диаграммой направленности антенны, излучающей навигационное сообщение, что осложняет технологию управления применением таких НКА.
Технический результат, достигаемый изобретением, заключается в повышении надежности навигационных определений потребителей навигационной информации, выполняемых с помощью ГНСС, за счет увеличения количества источников навигационных сообщений орбитального базирования. Изобретение, кроме того, обеспечивает расширение области применения низкоорбитальных космических аппаратов (КА), штатно не предназначенных для решения задач наземных потребителей, а также высокую эксплуатационную эффективность применения КА функционального дополнения за счет отсутствия необходимости затрат ресурсов наземного комплекса для расчета эфемеридной информации, необходимой для работы КА функционального дополнения.
В основу изобретения положена задача определения параметров орбиты низкоорбитального КА, находящегося в автономном полете, по сигналам наземных стационарных телевизионных радиостанций, излучаемых при телевещании, с погрешностью, не превышающей погрешность параметров орбиты штатных НКА ГНСС.
Сущность изобретения состоит в том, что для достижения указанных выше технических результатов в способе построения функционального дополнения орбитального базирования к глобальной навигационной спутниковой системе на борту низкоорбитального космического аппарата, штатное предназначение которого не связано с задачей трансляции навигационных сообщений для потребителей спутниковой навигационной информации, размещают навигационную аппаратуру потребителя ГНСС, с помощью которой принимают навигационные сообщения, и дополнительную аппаратуру, с помощью которой принимают сигналы эфирного телевидения наземных стационарных телевизионных радиостанций, выделяют несущие частоты двух и более телевизионных каналов, определяют доплеровское смещение несущих частот, определяют параметры орбиты, рассчитывают эфемериды космического аппарата, формируют навигационные сообщения в соответствии со структурой навигационного сообщения ГНСС, транслируют радионавигационные сигналы в направлении расположения потребителей навигационной информации.
Существенные признаки, характеризующие изобретение и обеспечивающие получение технического результата.
1. Включение в состав бортовой аппаратуры низкоорбитального космического аппарата, не предназначенного штатно для решения навигационных задач приземными потребителями информации ГНСС, дополнительной аппаратуры, обеспечивающей расширение области его функционального применения.
2. Выполнение следующей совокупности последовательных действий для формирования навигационного сообщения КА функционального дополнения:
- прием сигналов эфирного телевидения;
- измерение текущих навигационных параметров орбиты по сигналам эфирного телевидения;
- определение параметров орбиты КА функционального дополнения по текущим навигационным параметрам, измеренным по телевизионным сигналам;
- прием навигационных сообщений НКА ГНСС;
- расчет эфемерид КА функционального дополнения;
- формирование навигационных сообщений КА функционального дополнения и последовательности радионавигационных сигналов;
- трансляция радионавигационных сигналов в направлении расположения потребителей навигационной информации.
Существующие способы построения функционального дополнения к ГНСС основаны на развертывании технических систем наземного или орбитального базирования, предназначенных именно для формирования навигационного сообщения и его трансляции в направлении расположения потребителей. Для реализации существующих способов построения функционального дополнения необходимы затраты ресурсов не только на размещение технических систем функционального дополнения, но и на эксплуатацию таких технических систем. Так, в случае применения способа построения функционального дополнения на высокоэллиптических орбитах [2, с.7-15] совокупность действий, осуществляемых для расчета эфемерид таких НКА и формирования навигационных сообщений, предусматривается оставить такой же, как и при существующей штатной совокупности действий, выполняемой для расчета эфемерид и формирования навигационных сообщений штатных НКА ГНСС.
В заявленном способе дополнительные затраты на развертывание технических систем, предназначенных для формирования и трансляции навигационных сообщений не требуются, так как в качестве носителей технических систем функционального дополнения могут применяться низкоорбитальные КА, выводимые на орбиты для решения задач космической связи, дистанционного зондирования Земли, топогеодезического и метеорологического обеспечения. Для таких КА задача формирования и трансляции радионавигационных сигналов не является штатной. При установке дополнительного навигационного оборудования на борту таких КА и применении телевизионных сигналов для определения параметров орбит не требуются затраты ресурсов наземного комплекса управления на решение задач расчета эфемеридной информации КА, предназначенных для построения функционального дополнения ГНСС. Таким образом достигается высокая эксплуатационная эффективность применения КА функционального дополнения.
Обоснование реализуемости способа построения функционального дополнения заключается: во-первых, в обосновании возможности автономного определения параметров орбиты КА бортовой аппаратурой по телевизионным сигналам с погрешностью, не превышающей погрешность определения орбит навигационных КА ГНСС; во-вторых, в обосновании возможности формирования навигационного сообщения на борту КА функционального сообщения на основании информации, содержащейся в принятом навигационном сообщении КА ГНСС, и параметрах орбиты, рассчитанных по телевизионным сигналам.
Предпосылками возможности использования телевизионных сигналов для измерения текущих навигационных параметров орбиты с высокой точностью, необходимой для определения параметров орбиты КА функционального дополнения, являются следующие характеристики сети эфирного телевидения [3, с.240, 251]:
а) радиостанции эфирного телевидения имеют высокую мощность излучения, а на территории РФ создана разветвленная сеть радиостанций с известными координатами излучателей, включающая в настоящее время около 350 радиостанций мощностью от 5 до 50 кВт;
б) телевизионные сигналы отличаются высокой стабильностью несущих частот изображения.
В предложенном способе в качестве текущего навигационного параметра для расчета эфемерид КА функционального дополнения используют радиальную скорость его движения относительно телевизионной радиостанции. Погрешность измерения радиальной скорости VR по сигналам телевизионного вещания при беззапросном методе измерения радиальной скорости движения относительно телевизионной радиостанции оценивается формулой [4, с.155]

где С, ΔС - скорость света и погрешность ее определения;
f0KA, Δf0KA - частота и отклонение частоты эталонного генератора КА от номинального значения;
f0, Δf0 - частота и отклонение частоты эталонного генератора телевизионной радиостанции от номинального значения;
Δf∂ - инструментальная погрешность измерения доплеровского смещения частоты.
Предположим, что на телевизионной радиостанции и КА установлены генераторы эталонной частоты, у которых характеристики относительной нестабильности эталонных генераторов частоты близки: Δf0/f0≈Δf0KA/f0KA Такое предположение не нарушает строгости анализа, но позволяет сократить изложение результатов анализа. Учитывая, что VR<<С, а также неопределенность знаков отклонения частоты от номинального значения (Δf0/f0=±|Δf0/f0|) и инструментальной погрешности измерения (Δf∂=±|Δf∂|), уравнение для оценки ошибки измерения радиальной скорости представим в виде
Оценку дисперсии измерения радиальной скорости запишем в виде
где  - дисперсия погрешности измерения скорости света;
- дисперсия погрешности измерения скорости света;
 - дисперсия отклонения частоты эталонных генераторов от номинального значения;
- дисперсия отклонения частоты эталонных генераторов от номинального значения;
 - дисперсия инструментальной погрешности измерения доплеровского смещения частоты.
- дисперсия инструментальной погрешности измерения доплеровского смещения частоты.
Первые слагаемые в (1), (2) вызваны неточностью сведений о скорости распространения радиоволн. Относительная погрешность скорости света оценивается выражением
где ΔC0 - относительная погрешность скорости света в вакууме;
ΔCтр, ΔСион - отклонения скорости света от номинального значения, обусловленные действием тропосферы и ионосферы, соответственно.
Относительная погрешность скорости света в вакууме составляет ΔС0/С≈3·10-9. Поэтому вклад величины ΔС0 в оценку погрешности измерения радиальной скорости пренебрежимо мал. Погрешность тропосферного измерения радиальной скорости невелика [5], для решения задач навигации КА ею можно пренебречь. Так как телевизионные сигналы транслируются в различных частотных диапазонах, для исключения ошибки определения радиальной скорости, обусловленной влиянием ионосферы, в соответствии с предложенным способом измеряют доплеровское смещение несущих частот изображения двух телевизионных каналов и применяют двухчастотный метод учета ионосферной погрешности. Поэтому погрешностью первого слагаемого выражений (1), (2) можно пренебречь.
Второе слагаемое (1), (2) обусловлено нестабильностью эталонных генераторов частоты. Нестабильность частоты характеризуется отношением ее отклонения от номинального значения к номинальной частоте и складывается из кратковременной и долговременной нестабильности частоты. Дисперсию частоты представим в виде  где
где  - дисперсия долговременной нестабильности;
- дисперсия долговременной нестабильности;  дисперсия кратковременной нестабильности. Для исключения ошибки, обусловленной долговременной нестабильностью эталона частоты, в соответствии с предложенным способом применяют псевдодоплеровский метод навигации.
дисперсия кратковременной нестабильности. Для исключения ошибки, обусловленной долговременной нестабильностью эталона частоты, в соответствии с предложенным способом применяют псевдодоплеровский метод навигации.
В соответствии с требованиями к телевизионным передатчикам, установленным ГОСТ 20532-83, при работе телевизионных передатчиков в режиме точного смещения несущих частот допускается отклонение несущей частоты телевизионного канала от номинального значения на суточном временном интервале ±1 Гц, а в течение одного месяца ±100 Гц [6, с.8].
Для определения параметров орбиты достаточным является проведение сеансов измерения радиальной скорости КА продолжительностью одна минута. На таких интервалах при режиме точного смещения несущих частот относительная кратковременная нестабильность эталонов частоты телевизионных передатчиков, транслирующих радиоволны дециметрового диапазона, составит 10-11÷10-12.
Обеспечение относительной стабильности частоты бортового эталона 10-11÷10-12 на интервале нескольких минут достигается при использовании современных стандартов частоты, выпускаемых серийно [7, с.6].
Таким образом, погрешность измерения радиальной скорости, вызываемая вторым слагаемым выражений (1), (2), зависит от кратковременной нестабильности наземного и бортового эталонов частоты, и при Δf0/f0=10-11 составит 0,006 м/с, а при Δf0/f0=10-12 - 0,0006 м/с.
Потенциальная погрешность измерения доплеровского смещения частоты принимаемого сигнала оценивается дисперсией по выражению [7, с.103]
где d - расстояние между телевизионной радиостанцией и КА;
k=1,37·10-23 Вт/(К Гц) - постоянная Больцмана;
Тш - эквивалентная шумовая температура (по Кельвину);
Δtизм - длительность интервала измерения;
Δf∂t - доплеровский сдвиг частоты на интервале Δtизм;
δP - коэффициент, характеризующий мощность излучения телевизионной радиостанции в свободное пространство;
Р - мощность телевизионной радиостанции.
В методике оценки потенциальной точности измерения радиальной скорости, опубликованной в работе [8, с.103], длительность интервала измерения составляет
Δtизм=1 с. Для низкоорбитальных КА при таком интервале измерения доплеровское смещение несущей частоты 12 телевизионного канала составит Δf∂t≤50 Гц. Погрешность измерений реальной аппаратуры выше потенциальной. Увеличение погрешности обусловлено свойствами аппаратуры приемно-измерительного тракта. Предположим, что бортовая аппаратура позволяет проводить измерения с погрешностью, которая выше потенциальной не более чем в 10 раз, а случайные ошибки измерения распределены по нормальному закону. Тогда с вероятностью 0,95 инструментальная погрешность измерения радиальной скорости не превысит значений σ∂<20σ∂-потен.
Из диаграмм направленности телевизионных антенн следует, что около 10% мощности телевизионных радиостанций излучается в свободное пространство [9, стр.273], поэтому в выражении (3) примем δР=0,1.
Таким образом, инструментальная погрешность измерения радиальной скорости КА на расстоянии d<1500 км от телевизионной радиостанции по сигналу 12 телевизионного канала при эквивалентной шумовой температуре Тш=300К, δР=0,1, Р=25 кВт составит 0,0001 м/с. Оценку погрешности измерения радиальной скорости, получим, суммируя слагаемые выражения (1), и при Δf0/f0=10-12, d=1500 км, Tш=300К, δP=0,1, Р=25 кВт она не превысит 0,001 м/с. Такое значение погрешности соответствует погрешности наземных измерительных средств, применяемых для измерения параметров орбиты штатных НКА ГНСС.
Определение параметров орбиты по измеренным значениям радиальной скорости осуществляется методами, изложенными в работе [9, с.145-185]. При этом, так как погрешность измерения текущих навигационных параметров низкоорбитальных КА по сигналам телевещания соответствует погрешности штатных средств, предназначенных для измерения параметров орбиты КА ГНСС, погрешность определения орбиты КА функционального дополнения соответствует погрешности определения параметров орбиты КА ГНСС.
Задача формирования навигационного сообщения на борту КА функционального дополнения, заключается в определении необходимых данных, передаваемые каждым КА ГНСС. Данные содержат оперативную и неоперативную информацию [10, с.325-336].
Задача формирования оперативной информации навигационного сообщения КА функционального дополнения, состоит в расчете эфемерид КА по параметрам орбиты, определенным по телевизионным сигналам. Расчет эфемерид осуществляется с использованием методов прогнозирования траектории орбитального движения, изложенных в работе [9, с.186-197].
Подсистема контроля и управления ГНСС корректирует шкалу времени КА ГНСС для обеспечения единой системной шкалы времени UTC(SU) по данным наземного эталона времени [10, с.290-292]. Уточнение бортовой шкалы времени КА функционального дополнения выполняется на основании информации, содержащейся в навигационном сообщении ГНСС, и рассчитанных параметрах орбиты КА функционального дополнения. При этом для определения времени в шкале UTC(SU) на борту КА функционального дополнения используется соотношение

где tUTS(SU) - время в шкале UTC(SU) на борту КА ГНСС на момент излучения им навигационного сообщения, принятого на борту КА функционального дополнения;
x0,y0,z0 координаты КА ГНСС, навигационное сообщение которого принято на борту КА функционального дополнения;
х1, у1, z1 - координаты КА функционального дополнения на момент приема навигационного сообщения, рассчитанные по текущим навигационным параметрам, измеренным по телевизионным сигналам.
Для уточнения времени КА функционального дополнения используют навигационное сообщение такого КА ГНСС, в котором возраст оперативной информации, представляющий собой интервал времени, прошедший с момента ее расчета, имеет наименьшее значение. Это обусловлено тем, что возраст оперативной информации пропорционален величине ухода бортовой шкалы времени КА ГНСС от шкалы наземного эталона.
Неоперативная информация содержит альманах эфемерид всей орбитальной группировки КА ГНСС, и поэтому для формирования навигационного сообщения на борту КА функционального дополнения не требуется проведения дополнительных расчетов. Неоперативная информация, содержащаяся в навигационном сообщении, принятом на борту, пригодна для формирования части навигационного сообщения КА функционального дополнения, содержащего неоперативную информацию.
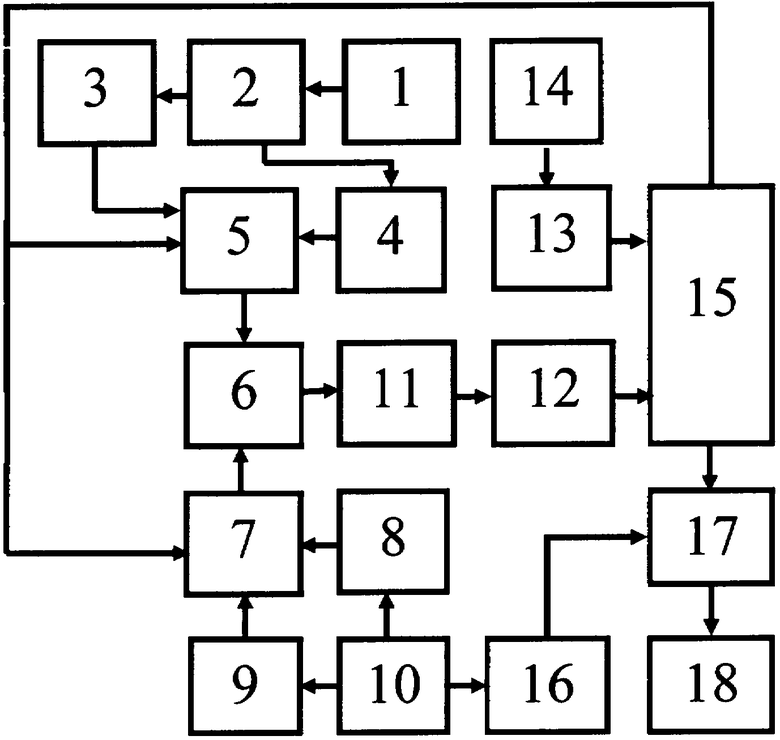
Блок-схема устройства для осуществления предлагаемого способа представлена на чертеже.
Устройство содержит приемную антенну 1, усилитель высокой частоты 2, полосовые фильтры 3 и 4, коммутатор диапазонов частот телевизионных каналов 5, смеситель сигналов 6, коммутатор опорных частот телевизионных каналов 7, множители частоты 8, 9 и 16, генератор опорной частоты высокой стабильности 10, усилитель низкой частоты 11, измеритель частоты 12, бортовой вычислитель 13, приемную антенну 14, аппаратуру потребителя навигационной информации ГНСС 15, кодер 17, передающую антенну 18.
При этом первый выход усилителя высокой частоты 2 соединен со входом полосового фильтра 3, второй выход усилителя высокой частоты 2 соединен со входом полосового фильтра 4, первый вход коммутатора диапазонов частот телевизионных каналов 5 соединен с первым выходом вычислителя 13, второй вход коммутатора диапазонов частот телевизионных каналов 5 соединен с полосовым фильтром 3, третий вход коммутатора диапазонов частот телевизионных каналов 5 соединен с полосовым фильтром 4, первый вход смесителя сигналов 6 соединен с полосовым фильтром 5, а второй вход соединен с выходом коммутатора опорных частот 7, первый вход коммутатора 7 соединен с множителем 8, второй вход коммутатора 7 соединен с множителем 9, третий вход коммутатора 7 соединен с первым выходом вычислителя 13, первый выход генератора 10 соединен с множителем 8, второй выход генератора 10 соединен с множителем 9, третий выход генератора 10 соединен с множителем 16, второй выход вычислителя 13 соединен с первым входом кодера 17, второй вход кодера 17 соединен со входом множителя 16.
Устройство работает следующим образом. Антенна 1 принимает сигнал телевизионный сигнал, который усиливает усилитель высокой частоты 2 и подает сигнал на полосовые фильтры 3 и 4, которые ограничивают полосу частот телевизионного сигнала диапазоном частот, в котором находятся несущие частоты двух телевизионных каналов с учетом доплеровского смещения частоты. Коммутатор диапазонов частот телевизионных каналов 5 по сигналу с первого выхода бортового вычислителя 13 соединяет выход коммутатора с первым или вторым входом коммутатора 5. Сигнал с выхода коммутатора 7 поступает на первый вход смесителя сигналов 6.
Генератор опорной частоты 10 формирует сигнал эталонной частоты высокой стабильности, который поступает на входы множителей 8 и 9. Множитель 8 формирует сигнал опорной частоты одного телевизионного канала, а множитель 9 формирует сигнал опорной частоты другого телевизионного канала, которые поступают соответственно на первый и второй входы коммутатора опорных частот 7. Коммутатор опорных частот 7 по сигналу с первого выхода бортового вычислителя 13 соединяет выход коммутатора с первым или вторым входом коммутатора 7. Сигнал с выхода коммутатора 7 поступает на второй вход смесителя сигналов 6.
Сигнал с выхода коммутатора диапазонов частот телевизионных каналов 5 поступает на первый вход смесителя сигналов 6 и смешивается с сигналом эталона несущей частоты высокой стабильности телевизионного сигнала, поступающего на второй вход смесителя 6. Смеситель 6 выделяет низкочастотные колебания доплеровского спектра, которые после усиления в усилителе 11, поступают на измеритель частоты 12, который измеряет доплеровский сдвиг несущей частоты телевизионного сигнала. Приемная антенна 14 принимает навигационное сообщение ГНСС, из которого аппаратура потребителя навигационной информации 15 выделяет служебную информацию, необходимую для формирования навигационного сообщения КА функционального дополнения. Бортовой вычислитель 13 выполняет следующие действия:
- определяет радиальную скорость движения КА относительно телевизионной радиостанции по измерениям доплеровского сдвига несущей частоты телевизионного сигнала;
- определяет параметры орбиты по значениям радиальной скорости движения;
- рассчитывает эфемериды КА функционального дополнения;
- формирует навигационное сообщение, подлежащее последующей трансляции бортовой аппаратурой.
На вход множителя 16 поступает сигнал эталонной частоты навигационного сообщения с третьего выхода генератора опорной частоты 10. Множитель 16 формирует сигнал эталонной частоты навигационного сообщения. Сигнал со второго выхода вычислителя 13 поступает на первый вход кодера 17, на второй вход которого подается сигнал эталонной частоты навигационного сообщения. Кодер 17 осуществляет кодирование сигнала эталонной частоты согласно сформированному навигационному сообщению. Радионавигационный сигнал, формируемый кодером 17, поступает на антенну 18 и транслируется в направлении потребителей навигационной информации.
Литература
1. Липкин И.Л. Спутниковые навигационные системы. -М.: Вузовская книга, 2001.
2. Информационно-навигационное функциональное дополнение космического базирования на высокоэллиптических орбитах к глобальным навигационным спутниковым системам. / Ю.П.Соловьев, В.П.Легостаев, Б.Е.Черток и др. / ЛХ Санкт-Петербургская международная конференция по интегрированным навигационным системам, 2002.
3. Телевизионная техника: Справочник. / Под ред. Ю.Б.Зубарева и Г.Л.Глориозова -М.: Радио и связь, 1994.
4. Основы радиоуправления. / П.А.Агаджалов, В.А.Вейцель, С.А.Волковский и др. Под ред. В.А.Вейцеля -М.: Радио и связь, 1995.
5. Кеншин М.О. Метод учета тропосферной рефракции в фазовых измерениях спутников GPS в случае отсутствия метеоданных. -СПб.: Изд. Института теоретической астрономии, 1997.
6. ГОСТ 7845-92. Система вещательного телевидения. Основные параметры, методы измерений.
7. Семенов В.В., Смирнова Г.М., Хуторщиков В.И. Квантовая радиофизика. Квантовые стандарты частоты с оптической накачкой. - СПб: Изд. СПбГТУ, 1999.
8. Судовые комплексы спутниковой навигации. / П.С.Волосов, Ю.С.Дубинко, Б.Г.Мордвинов, В.Д.Шинков - Л.: Судостроение, 1983.
9. Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических аппаратов. - М.: Дрофа, 2004.
10. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И.Петрова, В.Н.Харисова. - М.: Радиотехника, 2005.
Изобретение относится к спутниковой навигации и может использоваться для построения функционального дополнения орбитального базирования к глобальной навигационной спутниковой системе (ГЛОНАСС). Технический результат заключается в повышении надежности навигационных определений потребителей навигационной информации, выполняемых с помощью ГЛОНАСС, за счет увеличения количества источников навигационных сообщений орбитального базирования. Сущность способа состоит в том, что на борту низкоорбитального космического аппарата размещают навигационную аппаратуру потребителя, с помощью которой принимают навигационные сообщения и дополнительную аппаратуру, с помощью которой принимают сигналы эфирного телевидения наземных стационарных телевизионных радиостанций, выделяют несущие частоты двух или более телевизионных каналов, на основании которых определяют доплеровское смещение несущих частот, определяют параметры орбиты, рассчитывают эфемериды космического аппарата и формируют навигационные сообщения в соответствии с заданной структурой навигационного сообщения, затем транслируют радионавигационные сигналы в направлении расположения потребителей навигационной информации. 1 ил.
Способ построения функционального дополнения орбитального базирования к глобальным навигационным спутниковым системам (ГНСС), характеризующийся тем, что на борту низкоорбитального космического аппарата, штатное предназначение которого не связано с задачей трансляции навигационных сообщений для потребителей спутниковой навигационной информации, размещают навигационную аппаратуру потребителя ГНСС, с помощью которой принимают навигационное сообщение, и дополнительную аппаратуру, с помощью которой принимают сигналы эфирного телевидения наземных стационарных телевизионных радиостанций, выделяют несущие частоты двух и более телевизионных каналов, на основании которых определяют доплеровское смещение несущих частот, определяют параметры орбиты, рассчитывают эфемериды космического аппарата, формируют навигационные сообщения в соответствии со структурой навигационных сообщений ГНСС, транслируют радионавигационные сигналы в направлении расположения потребителей навигационной информации.
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| Соловьев Ю.П., Легостаев В.П., Черток Б.Е.и др | |||
| Информационно-навигационное функциональное дополнение космического базирования на высокоэллиптических орбитах к глобальным навигационным спутниковым системам | |||
| - IХ Санкт-Петербургская международная конференция по интегрированным навигационным системам, 2002 | |||
| СИСТЕМА КОСМИЧЕСКОЙ ОПТИЧЕСКОЙ СВЯЗИ МЕЖДУ КООПЕРИРУЕМЫМ ОБЪЕКТОМ И ОБЪЕКТОМ-КОРРЕСПОНДЕНТОМ | 2004 |
|
RU2275743C2 |
| СПОСОБ АВТОНОМНОГО СНИЖЕНИЯ ПОРОГОВ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ НЕСУЩИХ СИГНАЛОВ, ПРИНИМАЕМЫХ НА ОРБИТЕ | 1997 |
|
RU2187127C2 |
| ГЛОБАЛЬНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ВЕРОЯТНОСТИ ПРЕДСТОЯЩЕГО ЗЕМЛЕТРЯСЕНИЯ | 2003 |
|
RU2247412C2 |

