Изобретение относится к электротехнике и предназначено для диагностирования статических и динамических эксцентриситетов в электрических машинах автономных объектов как в процессе эксплуатации, так и в процессе испытаний, например, авиационных генераторов.
Известен способ диагностирования электрических и механических повреждений асинхронного двигателя с короткозамкнутым ротором [патент РФ №2479096 С2, H02K 15/00, G01R 31/34, 10.04.2013], по которому диагностика осуществляется во время работы двигателя путем измерения величин тока в двух точках его короткозамыкающего кольца, разнесенных относительно друг друга на величину полюсного деления асинхронного двигателя или кратную ей, для чего на короткозамкнутом кольце ротора в указанных точках устанавливаются два датчика тока. Величины токов. протекающих в короткозамыкающем кольце ротора, свидетельствуют о наличии или отсутствии повреждений двигателя.
Недостатками данного способа являются ограниченная область применения и сложность технической реализация, обусловленная установкой датчиков тока на короткозамкнутом кольце ротора.
Известен способ диагностики электрических машин по внешнему магнитному полю [Бойкова О.А. Функциональная диагностика неисправностей электромеханических элементов электротехнических комплексов по внешнему электромагнитному полю // автореферат на соискание ученной степени кандидата технических наук по специальности 05.09.03 «Электротехнические комплексы и системы», Уфа - 2011, 16 с.], по которому диагностика электрической машины осуществляется путем регистрации и анализа параметров ее внешнего магнитного поля.
Недостатками данного способа являются сложность его технической реализации и невысокий уровень его диагностического критерия, обусловленный слабой величиной внешнего магнитного поля.
Известен способ диагностирования генераторов переменного тока и устройство для его осуществления [патент РФ №2077064С1, H02K 15/00, G01R 31/34, 10.04.1997], по которому для определения технического состояния генератора и вида неисправности на обмотку возбуждения подается переменное напряжение и осуществляется осциллографическое наблюдение выходного сигнала с генератора и его сравнение с эталонным сигналом с помощью фигуры Лиссажу.
Недостатками данного способа являются ограниченная область применения, обусловленная тем, что у многих конструкций генераторов отсутствует обмотка возбуждения и сложность технической реализации, обусловленная необходимостью осциллографического наблюдения.
Известен способ автоматического контроля механических повреждений трехфазных асинхронных электродвигателей [патент РФ №2356061 C1, G01R 31/00, 20.05.2009], при котором в течение заданного интервала времени производят запись значений фазного тока электродвигателя и его спектральный анализ, полученные результаты спектрального анализа сравнивают с заданными значениями гармоник тока, отличающийся тем, что амплитуды гармоник тока, полученные в результате спектрального анализа, сравнивают с опорными значениями, характерными для каждого из видов механических повреждений в зависимости от уровня первой гармоники тока статора, причем набор характерных частот задают в зависимости от конструкции электродвигателя, вида предполагаемого повреждения, а заключение о наличии предполагаемого повреждения делают по превышению значений анализируемого сигнала на характерных частотах над опорными значениями.
Недостатками данного способа являются ограниченная область применения и сложность технической реализация, обусловленная необходимостью осциллографического наблюдения.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является способ диагностирования электрических машин [патент РФ №2246644 C1, F16C 32/04, 20.02.2005], который основан на контроле ЭДС, генерируемой электрической машиной при вращении по инерции при отключенном питающем напряжении, и обеспечивает с помощью контроллера отключение электрической машины при наличии неисправностей и информирование о техническом состоянии электрической машины.
Недостатками данного способа являются ограниченные функциональные возможности, обусловленные диагностированием при вращении ротора по инерции, и, как следствие, и изменяющимся во времени диагностическим критерием - ЭДС, отсутствием возможности диагностики при номинальной частоте вращения ротора и невозможностью определения таких неисправностей электрической машины как статический и динамический эксцентриситет и уровень колебаний ее ротора.
Задача изобретения - расширение функциональных возможностей благодаря введению возможности диагностики электрических машин при номинальной частоте вращения, определению величины эксцентриситета, а также его типа, статического или динамического и уровня колебаний ротора, расширению области применения благодаря возможности диагностики всех типов машин переменного тока.
Техническим результатом является повышение точности диагностики электрической машины, введение возможности определения не только количественных, но и качественных характеристик дефекта (например, типа эксцентриситета: статический или динамический), упрощение технической реализации диагностики, а также возможность диагностики в режиме реального времени.
Поставленная задача решается и указанный технический результат достигается тем, что в способе диагностирования электрической машины, по которому измеряют электродвижущую силу (ЭДС), согласно изобретению, что электродвижущую силу измеряют в момент холостого хода электрической машины на номинальной частоте вращения ротора, сравнивают ее с эталонной величиной, характеризующей исправное состояние электрической машины, и при расхождении измеренной электродвижущей силы и эталонной, по величине измеренной электродвижущей силе рассчитывают величины статических и динамических эксцентриситетов, а по разложению осциллограммы измеренной электродвижущей силы в ряд Фурье рассчитывают уровень колебаний, и по величинам статических и динамических эксцентриситетов, а также по уровню колебаний судят о техническом состоянии электрической машины в режиме реального времени.
Сущность изобретения поясняется чертежами.
На фиг.1 изображено ЭДС витка. На фиг.2 изображено распределение магнитной индукции по средней линии воздушного зазора в электрической машине без статических и динамических эксцентриситетов, при наличии статических и динамических эксцентриситетов, составляющих 5% от величины воздушного зазора электрической машины, при наличии статических и динамических эксцентриситетов, составляющих 10% от величины воздушного зазора электрической машины, при наличии статических и динамических эксцентриситетов, составляющих 15% от величины воздушного зазора электрической машины. На фиг.3 изображено суммирование векторов ЭДС активных сторон витка при исправном состоянии электрической машины. На фиг.4 изображено суммирование векторов ЭДС активных сторон витка при наличии статического или динамического эксцентриситета.
Пример конкретной реализации способа.
При вращении исправного четырехполюсного магнитоэлектрического генератора мощностью 65 кВт на холостом ходу с номинальной частотой вращения 12000 об/мин индукция в воздушном зазоре магнитоэлектрического генератора составляет 0,9 Тл. При этом ЭДС витка EB фазы A определяется геометрической суммой векторов ЭДС первой и второй активных сторон витка, фиг.1:

где EB - ЭДС витка;


Учитывая то, что


где l - активная длина магнитоэлектрического генератора;
B1 - магнитная индукция в воздушном зазоре под первым витком;
B2 - магнитная индукция в воздушном зазоре под вторым витком;
f - частота генерируемого тока;
τ - полюсное деление.
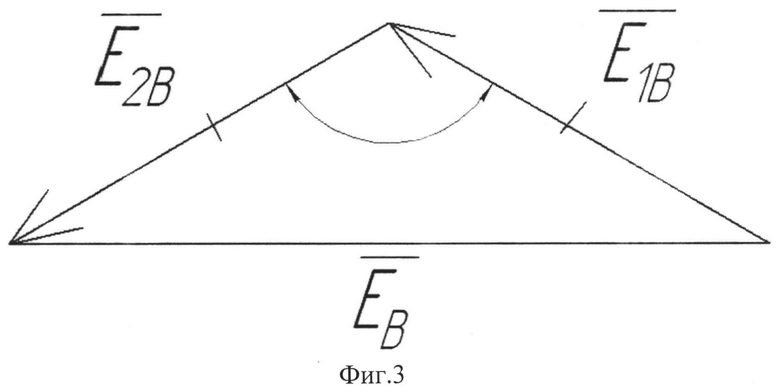
Так как при исправном состоянии магнитная индукция в воздушном зазоре под первой и второй активными сторонами витка фазы A равны (фиг.2), то и ЭДС первой и второй активных сторон витка фазы A равны, тогда векторы ЭДС первой и второй активных сторон витка фазы A суммируются по правилу треугольника (фиг.3), и в результате полное ЭДС витка фазы A определяется по теореме Пифагора для равнобедренного треугольника:

где β - относительный шаг витка.
Суммарное ЭДС равняется 5,82 В витка фазы А при активной длине магнитоэлектрического генератора 142 мм, полюсном перекрытии 57 мм, частоте генерируемого тока 400 Гц, относительном шаге витка 87,7 и магнитной индукции в воздушном зазоре 0,9 Тл.
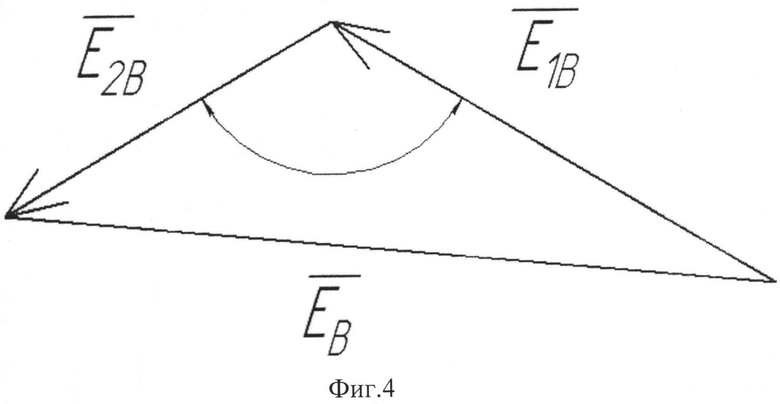
При наличии эксцентриситета в 15% от воздушного зазора, то есть при неисправном состоянии четырехполюсного магнитоэлектрического генератора, магнитная индукция в воздушном зазоре под первой и второй активными сторонами витка фазы A не равны (фиг.2), и, как следствие, ЭДС первой и второй активных сторон витка фазы A не равны, тогда векторы ЭДС первой и второй активных сторон витка фазы A суммируются по правилу треугольника (фиг.4) и в результате полное ЭДС витка фазы A определяется по теореме косинусов:

Суммарное ЭДС витка фазы A при эксцентриситете в 15% от величины воздушного зазора равняется 8,388 В при активной длине магнитоэлектрического генератора 142 мм, полюсном перекрытии 57 мм, частоте генерируемого тока 400 Гц, относительном шаге витка 87,7 и магнитной индукции в воздушном зазоре 0,92 Тл под первой активной стороной витка и 0,87 Тл под второй активной стороной.
Тогда для исправного генератора ЭДС фазы A при числе витков 10 равняется 46,56 В и рассчитывается как геометрическая сумма ЭДС четырех витков фазы A, при этом все ЭДС витков фазы A равны, а при статическом или динамическом эксцентриситете в 15% от величины воздушного зазора ЭДС фазы A рассчитывается как геометрическая сумма четырех неодинаковых ЭДС витка фазы A, каждое из которых зависит от величины эксцентриситета. ЭДС каждой активной стороной витка фазы A, для рассматриваемого примера имеем 8 активных сторон каждого витка фазы A, соответственно, определяется в виде







где Br - остаточная магнитная индукция постоянного магнита (Br=1,1 Тл);
δ - воздушный зазор;
D2 - диаметр ротора;
kδ - коэффициент, учитывающий зубцы статора;
µ0 - магнитная проницаемость;

σо - коэффициент учитывающий рассеивание магнита;
e - величина статического эксцентриситета;
Hc - коэрцитивная сила.
Тогда четыре неодинаковых ЭДС фазы A рассчитываются согласно выражению (5), с учетом выражений (6)-(13), а максимальное суммарное ЭДС фазы А определяется как геометрическая сумма четырех неодинаковых ЭДС витков фазы A. Для динамического эксцентриситета расчет носит аналогичный характер.
Максимальное ЭДС фазы A при эксцентриситете в 15% от величины воздушного зазора равняется 54,38 В. Причем при статическом эксцентриситете максимальное ЭДС сохраняет свое максимальное значение во времени, а при динамическом изменяется от 45 В до 54,38 В. Из представленных выше расчетов очевидно, что ЭДС электрической машины без эксцентриситета и с эксцентриситетом разнятся, а следовательно, по величине измеренной ЭДС с учетом выражения (5)-(13) определяется величина статического или динамического эксцентриситета. Причем при статическом эксцентриситете максимальное значение ЭДС витка будет постоянным, а при динамическом изменяться во времени.
Колебания ротора магнитоэлектрического генератора наводят дополнительные ЭДС в витках, которые определяются путем разложения осциллограммы измеренной ЭДС в ряд Фурье и по данному разложению возможно судить об уровне колебаний.
Таким образом, повышается точность диагностики электрической машины, вводится возможность определения не только количественных, но и качественных характеристик дефекта (например, типа эксцентриситета: статический или динамический), упрощается техническая реализация диагностики, а также достигается возможность диагностики в режиме реального времени.
Итак, заявляемое изобретение позволяет расширить функциональные возможности благодаря введению возможности диагностики электрических машин при номинальной частоте вращения, определить величину эксцентриситета, а также его тип, статический или динамический и уровень колебаний ротора, расширить область применения благодаря возможности диагностики всех типов машин переменного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2013 |
|
RU2534225C2 |
| СПОСОБ ТОРМОЖЕНИЯ РОТОРА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ НА МАГНИТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2549363C1 |
| ИМПУЛЬСНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 1997 |
|
RU2122177C1 |
| ПРИБОР ДЛЯ ПРОВЕРКИ МАГНИТНОГО СЦЕПЛЕНИЯ | 2013 |
|
RU2537051C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| СПОСОБ БЕССЕНСОРНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РОТОРА В БЕСКОНТАКТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2539690C1 |
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ ВИТКОВЫХ ЗАМЫКАНИЙ И ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБМОТКИ РОТОРА ТУРБОГЕНЕРАТОРА С ОПРЕДЕЛЕНИЕМ ТОКА РОТОРА ПО ПАРАМЕТРАМ СТАТОРА | 2011 |
|
RU2472168C2 |
| СТАБИЛИЗИРОВАННЫЙ ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2542711C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829312C1 |
| Способ измерения динамического эксцентриситета электрической машины | 1985 |
|
SU1332466A1 |

Предложенное изобретение относится к электротехнике и предназначено для диагностирования статических и динамических эксцентриситетов в электрических машинах автономных объектов, как в процессе эксплуатации, так и в процессе испытаний, например авиационных генераторов. Согласно предложенному способу диагностирования электрической машины измеряют электродвижущую силу в момент холостого хода электрической машины на номинальной частоте вращения ротора, сравнивают ее с эталонной величиной, характеризующей исправное состояние электрической машины, и при расхождении измеренной электродвижущей силы и эталонной по величине измеренной электродвижущей силы рассчитывают величины статических и динамических эксцентриситетов. По разложению осциллограммы измеренной электродвижущей силы в ряд Фурье рассчитывают уровень колебаний. Кроме того, по величинам статических и динамических эксцентриситетов, а также по уровню колебаний судят о техническом состоянии электрической машины в режиме реального времени. Технический результат: повышение точности диагностики электрической машины, введение возможности определения не только количественных, но и качественных характеристик дефекта (например, типа эксцентриситета - статический или динамический), упрощение технической реализации диагностики, а также возможность диагностики в режиме реального времени. 4 ил.
Способ диагностирования электрической машины, по которому измеряют электродвижущую силу, отличающийся тем, что электродвижущую силу измеряют в момент холостого хода электрической машины на номинальной частоте вращения ротора, сравнивают ее с эталонной величиной, характеризующей исправное состояние электрической машины, и при расхождении измеренной электродвижущей силы и эталонной по величине измеренной электродвижущей силы рассчитывают величины статических и динамических эксцентриситетов, а по разложению осциллограммы измеренной электродвижущей силы в ряд Фурье рассчитывают уровень колебаний, и по величинам статических и динамических эксцентриситетов, а также по уровню колебаний судят о техническом состоянии электрической машины в режиме реального времени.
| EP 1455436 A1, 08.09.2004 | |||
| Способ косвенного контроля неравномерности воздушного зазора асинхронного двигателя | 1984 |
|
SU1168878A1 |
| Способ косвенного контроля динамического эксцентриситета электрической машины | 1982 |
|
SU1072196A1 |
| Способ и приспособление для изготовления из бетона, асбестоцемента и других пластичных материалов тонкостенных, криволинейных изделий | 1955 |
|
SU103259A1 |
| Способ косвенного контроля динамического эксцентриситета асинхронной электрической машины | 1977 |
|
SU672708A1 |
| US 4985857 A, 15.01.1991 | |||
| СУРКОВ Д.В | |||
| автореферат "Электромагнитные способы определения эксцентриситета и несимметрии короткозамкнутой клетки ротора асинхронных двигателей", Оренбург, 2008 | |||

