Изобретение относится к области объемного гидропривода, а именно к объемным гидроприводам с двумя гидродвигателями, выходные звенья которых в процессе работы привода должны двигаться синхронно при возможности начальной установки любого взаимного положения указанных звеньев, и может быть использовано, например, в прокатных и гибочных станах для управления клетями, в листогибочных вальцах для управления валками, в приводах металлорежущих станков, подъемных и других машин и механизмов, по условиям эксплуатации которых необходимо согласованное движение выходных звеньев гидродвигателей.
Известен способ синхронизации движения выходных звеньев двух гидродвигателей объемного гидропривода, заключающийся в том, что на основании контроля координат выходных звеньев эти гидродвигателей увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, путем изменения в зависимости от рассогласования координат выходных звеньев гидродвигателей гидравлического сопротивления рабочих окон дросселирующего гидрораспределителя, через который рабочая жидкость поступает на слив из сливных полостей гидродвигателей [1].
Недостатком данного способа является возникновение дополнительных потерь энергии, связанных с прохождением жидкости через рабочие окна дросселирующего гидрораспределителя. Эти потери снижают коэффициент полезного действия гидропривода и приводят к излишнему нагреву рабочей жидкости, что осложняет поддержание требуемого температурного режима работы гидропривода.
Наиболее близким по технической сущности к заявляемому способу является принятый в качестве прототипа способ синхронизации движения выходных звеньев двух гидродвигателей объемного гидропривода, к каждому из которых рабочая жидкость поступает от индивидуального насоса, заключающийся в том, что на основании контроля координат выходных звеньев этих гидродвигателей увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, путем соответствующего изменения рабочего объема и, соответственно, подачи вышеупомянутых насосов, которые выполнены регулируемыми [2]. Этот способ синхронизации основан на использовании машинного способа управления гидроприводом, характеризуемого высоким коэффициентом полезного действия.
Недостатком указанного способа является необходимость использования для его реализации регулируемых насосов с номинальным рабочим объемом, при котором обеспечиваются требуемые максимальные значения скоростей движения выходных звеньев гидродвигателей, что предопределяет повышенные затраты на изготовление гидропривода.
Технической задачей, решаемой изобретением, является создание способа синхронизации движения выходных звеньев двух гидродвигателей объемного гидропривода, к каждому из которых рабочая жидкость поступает от индивидуального насоса, обеспечивающего снижение затрат на изготовление гидропривода.
Для решения поставленной задачи в известном способе синхронизации движения выходных звеньев двух гидродвигателей объемного гидропривода, к каждому из которых рабочая жидкость поступает от индивидуального насоса, заключающемся в том, что на основании контроля координат выходных звеньев этих гидродвигателей увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, согласно изобретению увеличение расхода рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшение расхода рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, осуществляют путем перевода части рабочей жидкости из напорной гидролинии насоса, питающего гидродвигатель, выходное звено которого опережает в своем движении, в напорную гидролинию насоса, питающего гидродвигатель, выходное звено которого отстает в своем движении, посредством дополнительного реверсивного насоса-мотора, направление и величину расхода рабочей жидкости через который изменяют пропорционально отклонению разности координат выходных звеньев гидродвигателей от заданного значения.
Увеличение расхода рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшение расхода рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, путем перевода части рабочей жидкости из напорной гидролинии насоса, питающего гидродвигатель, выходное звено которого опережает в своем движении, в напорную гидролинию насоса, питающего гидродвигатель, выходное звено которого отстает в своем движении, посредством дополнительного реверсивного насоса-мотора, направление и величину расхода рабочей жидкости через который изменяют пропорционально отклонению разности координат выходных звеньев гидродвигателей от заданного значения, позволяет осуществлять синхронизацию движения выходных звеньев гидродвигателей при использовании в гидроприводе лишь одного регулируемого агрегата, включающего в свой состав гидромашину (реверсивный насос-мотор) с небольшим рабочим объемом, так как расход рабочей жидкости через эту гидромашину определяется не скоростью движения выходных звеньев гидродвигателей, которую необходимо обеспечить при работе гидропривода, а возможным рассогласованием (разностью) их фактических скоростей движения. В результате, при реализации предлагаемого способа синхронизации снижаются затраты на изготовление гидропривода.
Следует отметить, что направление и величина расхода рабочей жидкости через реверсивный насос-мотор может изменяться как путем изменения его рабочего объема при применении регулируемого насоса-мотора (в этом случае приводящий двигатель насоса-мотора может быть выполнен нерегулируемым), так и путем изменения частоты и направления вращения вала его приводящего электродвигателя с частотным управлением (в этом случае реверсивный насос-мотор может быть выполнен нерегулируемым).
Сущность изобретения поясняется чертежом, на котором приведен один из возможных вариантов принципиальной схемы объемного гидропривода для осуществления предлагаемого способа синхронизации движения выходных звеньев двух гидродвигателей.
Объемный гидропривод содержит в своем составе два гидродвигателя (в данном случае два поршневых гидроцилиндра двухстороннего действия) 1, 2 с выходными звеньями (в данном случае штоками) 3, 4, которые для контроля их координат снабжены датчиками положения соответственно 5, 6. В общем случае тип гидродвигателей может быть иным (в качестве их могут использоваться гидромоторы и поворотные гидродвигатели).
Рабочие полости гидродвигателя 1 посредством гидрозамка двухстороннего действия 7 соединены с исполнительными каналами гидрораспределителя 8, входной канал которого соединен с напорным каналом насоса 9, а выходной канал - с гидробаком 10.
Рабочие полости гидродвигателя 2 посредством гидрозамка двухстороннего действия 11 соединены с исполнительными каналами гидрораспределителя 12, входной канал которого соединен с напорным каналом насоса 13, а выходной канал - с гидробаком 10.
Всасывающие каналы насосов 9 и 13 также соединены с гидробаком 10.
Для обеспечения минимизации количества причин рассинхронизации движения выходных звеньев 3, 4 гидродвигателей 1, 2 привод насосов 9, 13 может осуществляться от одного двигателя.
Гидрораспределители 8 и 12 выполнены с электрогидравлическим управлением (управление гидрораспределителей может быть иным, например, электрическим или электропневматическим).
В состав гидропривода входит регулируемый реверсивный насос-мотор 14, один из рабочих каналов которого посредством крана 15 соединен с напорным каналом насоса 9, а другой - посредством крана 16 с напорным каналом насоса 13.
Насос-мотор 14 выполнен с пропорциональным электрическим управлением, и его электронный блок управления электрически соединен с одним из выходных каналов свободно программируемого контроллера 17, другие выходные каналы которого соединены с электромагнитами гидрораспределителей 8, 12, а соответствующие входные каналы - с выходными каналами датчиков положения 5 и 6 и с пультом управления 18, снабженным необходимыми органами управления и средствами визуализации (органы управления и средства визуализации на чертеже не показаны).
Программное обеспечение контроллера 17 допускает работу объемного гидропривода как в режиме синхронизации движения выходных звеньев 3, 4 гидродвигателей 1 и 2, так и в режиме раздельного управления каждым из этих гидродвигателей в соответствии с командами, формируемыми с пульта управления 18.
Предлагаемый способ синхронизации движения выходных звеньев двух гидродвигателей реализуют следующим образом.
В режиме раздельного управления каждым из гидродвигателей 1, 2 их выходные звенья 3, 4 путем подачи управляющих электрических сигналов на соответствующие электромагниты гидрораспределителей 8, 12 устанавливают в требуемое взаимное положение, которое должно сохраняться при совместной работе гидродвигателей 1, 2 в режиме синхронизации движения (при этом разность координат x3 и x4 выходных звеньев 3, 4 гидродвигателей 1, 2 в соответствии с сигналами датчиков положения 5, 6 может быть как нулевой, так и отличной от нуля).
При работе гидропривода в режиме раздельного управления гидродвигателями 1, 2 рабочий объем насоса-мотора 14 по умолчанию устанавливается равным нулю. При длительной работе гидропривода в данном режиме приводящий двигатель насоса-мотора 14 (на чертеже приводящий двигатель не показан) должен быть выключен для исключения неоправданных потерь энергии, а проходные сечения кранов 15 и 16 должны быть закрыты.
При работе гидропривода в режиме синхронизации движения приводящий двигатель насоса-мотора 14 должен быть включен, а проходные сечения кранов 15 и 16 должны быть открыты.
При выборе с пульта управления 18 работы гидропривода в режиме синхронизации движения в памяти контроллера 17 на основании сигналов датчиков положения 5, 6 фиксируется значение разности координат выходных звеньев 3, 4 гидродвигателей 1 и 2, существующее на момент перехода к указанному режиму, которое далее используется в качестве заданного значения Δзад этой разности.
При подаче с пульта управления 18 команды на движение в том или ином направлении выходных звеньев 3, 4 гидродвигателей 1, 2 в случае работы гидропривода в режиме синхронизации движения со стороны контроллера 15 автоматически формируется управляющий электрический сигнал на одновременную подачу напряжения на соответствующие электромагниты гидрораспределителей 8, 12.
Если при движении выходных звеньев 3, 4 гидродвигателей 1, 2 разность их координат Δ=x3-x4 согласно сигналам датчиков положения 5, 6 отклоняется от заданного значения Δзад, то пропорционально указанному отклонению δ=Δ-Δзад (с учетом его знака) на выходе контроллера 15, к которому присоединен электронный блок управления насоса-мотора 14, формируется управляющий электрический сигнал. В результате регулирующий орган насоса-мотора 14 соответствующим образом отклоняется из своего нейтрального (нулевого) положения и рабочий объем qнм насоса-мотора 14 изменяется пропорционально отклонению δ текущей разности Δ координат x3 и x4 выходных звеньев 3, 4 гидродвигателей 1, 2 от заданного значения Δзад этой разности: qнм =k·δ, где k - коэффициент пропорциональности (величина коэффициента k выбирается с учетом требований к точности и устойчивости работы системы синхронизации). Вследствие этого расход Qнм рабочей жидкости через насос-мотор 14 также изменяется пропорционально величине δ (с учетом знака δ): Qнм=qнм·n=k·δ·n, где n - частота вращения вала приводящего двигателя насоса-мотора 14.
Если отклонение δ положительно, то рабочая жидкость из напорной гидролинии насоса 9 через насос-мотор 14 поступает в напорную гидролинию насоса 13, что при прочих равных условиях влечет за собой снижение скорости движения выходного звена 3 гидродвигателя 1 и увеличение скорости движения выходного звена 4 гидродвигателя 2 и соответственно уменьшение отклонения δ текущей разности Δ координат x3 и x4 выходных звеньев 3, 4 гидродвигателей 1, 2 от заданного значения Δзад этой разности.
Если же рассматриваемое отклонение отрицательно, то рабочая жидкость из напорной гидролинии насоса 13 через насос-мотор 14, регулирующий орган которого в данном случае отклоняется в другую сторону из нейтрального (нулевого) положения, поступает в напорную гидролинию насоса 9, что при прочих равных условиях влечет за собой снижение скорости движения выходного звена 4 гидродвигателя 2 и увеличение скорости движения выходного звена 3 гидродвигателя 1 и соответственно уменьшение по абсолютной величине отклонения δ текущей разности Δ координат x3 и x4 выходных звеньев 3, 4 гидродвигателей 1, 2 от заданного значения Δзад этой разности.
Следует отметить, что в тех случаях, когда давление в напорной гидролинии насоса (9 или 13), в которую поступает жидкость через насос-мотор 14, больше, чем в напорной гидролинии насоса (13 или 9), из которой жидкость поступает через насос-мотор 14, то насос-мотор 14 работает в режиме насоса. В противном случае он работает в режиме гидромотора, и при использовании для привода насоса-мотора 14 электродвигателя последний начинает работать как генератор, в результате чего энергия жидкости, проходящей через насос-мотор 14, частично преобразуется в электрическую энергию и возвращается в электросистему.
Как следует из вышеприведенного описания, при реализации предлагаемого способа синхронизации движения выходных звеньев двух гидродвигателей, к каждому из которых рабочая жидкость поступает от индивидуального насоса, отпадает необходимость в использовании в гидроприводе регулируемых насосов с подачей, обеспечивающей требуемые максимальные значения скоростей движения выходных звеньев гидродвигателей. В соответствии с предлагаемым способом синхронизация движения выходных звеньев гидродвигателей обеспечивается при применении в гидроприводе лишь одной гидромашины с регулируемым по величине расходом - реверсивного насоса-мотора, который служит только для устранения рассогласования в перемещении указанных выходных звеньев, в связи с чем его рабочий объем имеет существенно меньшее значение по сравнению с рабочими объемами насосов, от которых рабочая жидкость поступает к каждому из гидродвигателей. В результате, при реализации предлагаемого способа синхронизации снижаются затраты на изготовление гидропривода.
Дополнительно следует отметить, что, чем меньше рабочий объем объемной гидромашины (и соответственно меньше инерционность ее подвижных частей), тем меньшее время требуется после появления соответствующего управляющего сигнала для изменения ее рабочего объема (если машина регулируемая) или изменения частоты вращения ее вала (если ругулируемым является приводящий электродвигатель машины). Поэтому использование (в соответствии с предлагаемым способом) для синхронизации движения выходных звеньев гидродвигателей насоса-мотора с пониженным значением рабочего объема способствует повышению точности синхронизации.
Источники информации
1. Система синхронизации гидроцилиндров. Патент на изобретение RU №2105907. МКИ F15B 11/22. Заявлено 23.07.1996. Опубликовано 27.02.1998.
2. Система управления приводом хода машины с двумя независимыми бортами Dual Path. Описание системы. - Sauer-Danfoss: LI 111782, Rev ВА, May 2011. - 24 с. (рис.на с.7).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ВЫХОДНЫХ ЗВЕНЬЕВ НЕСКОЛЬКИХ ОБЪЕМНЫХ ГИДРОДВИГАТЕЛЕЙ | 2022 |
|
RU2778591C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕКУПЕРАЦИИ ЭНЕРГИИ | 2018 |
|
RU2688130C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2009 |
|
RU2421637C2 |
| ГИДРОПРИВОД С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2722767C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2020 |
|
RU2759191C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2001 |
|
RU2206804C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ, ЧУВСТВИТЕЛЬНЫЙ К НАГРУЗКЕ | 2020 |
|
RU2759190C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2515779C1 |
Область применения: гидрофицированное оборудование, используемое в различных отраслях машиностроения, в частности, в прокатных и гибочных станах для управления клетями, в листогибочных вальцах для управления валками, в приводах металлорежущих станков, подъемных и других машин и механизмов, по условиям эксплуатации которых необходимо согласованное движение выходных звеньев гидродвигателей. Способ синхронизации движения выходных звеньев 3, 4 двух гидродвигателей 1, 2 объемного гидропривода, к каждому из которых рабочая жидкость поступает от индивидуального насоса 9, 13, заключающийся в том, что часть рабочей жидкости из напорной гидролинии насоса, питающего гидродвигатель, выходное звено которого опережает в своем движении, переводят в напорную гидролинию насоса, питающего гидродвигатель, выходное звено которого отстает в своем движении, посредством дополнительного реверсивного насоса-мотора 14, направление и величину расхода рабочей жидкости через который изменяют пропорционально отклонению разности координат выходных звеньев 3, 4 гидродвигателей 1, 2 от заданного значения. Технический результат: снижение затрат на изготовление гидропривода. 1 ил.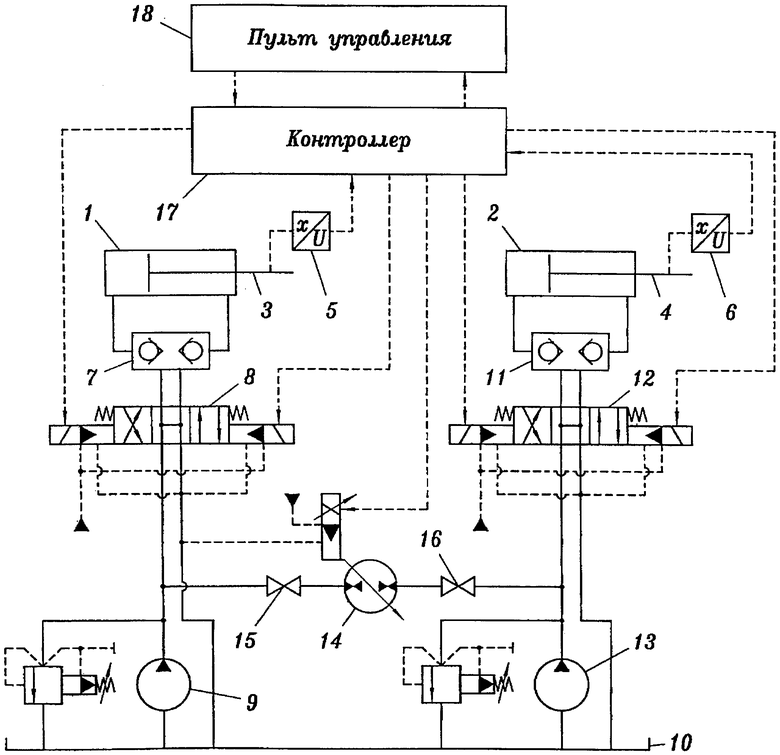
Способ синхронизации движения выходных звеньев двух гидродвигателей объемного гидропривода, к каждому из которых рабочая жидкость поступает от индивидуального насоса, заключающийся в том, что на основании контроля координат выходных звеньев этих гидродвигателей увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, отличающийся тем, что увеличение расхода рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшение расхода рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, осуществляют путем перевода части рабочей жидкости из напорной гидролинии насоса, питающего гидродвигатель, выходное звено которого опережает в своем движении, в напорную гидролинию насоса, питающего гидродвигатель, выходное звено которого отстает в своем движении, посредством дополнительного реверсивного насоса-мотора, направление и величину расхода рабочей жидкости через который изменяют пропорционально отклонению разности координат выходных звеньев гидродвигателей от заданного значения.
| US 6474063 B2, 05.11.2002 | |||
| US 3872674 A, 25.03.1975 | |||
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464452C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |

