Изобретение относится к области объемного гидропривода, а именно: к объемным гидроприводам с несколькими гидродвигателями, выходные звенья которых (штоки, плунжеры или корпуса гидроцилиндров; валы или корпуса гидромоторов и поворотных гидродвигателей) в процессе работы привода должны двигаться синхронно при возможности начальной установки любого взаимного положения указанных звеньев - и может быть использовано, например, в листогибочных вальцах для управления валками, в приводах прессов, проходческих щитов, подъемных и других машин и механизмов, по условиям эксплуатации которых необходимо согласованное движение выходных звеньев гидродвигателей.
Известен способ синхронизации движения выходных звеньев объемных гидродвигателей, заключающийся в том, что на основании контроля координат выходных звеньев этих гидродвигателей увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, путем изменения в зависимости от рассогласования координат выходных звеньев гидродвигателей подачи рабочей жидкости к соответствующему гидродвигателю от индивидуального насоса, который выполнен регулируемым [1].
Недостатком данного способа является его пониженная надежность, связанная с тем, что при выходе из строя (отказе) насоса, от которого осуществляется подача рабочей жидкости хотя бы к одному из гидродвигателей, становится невозможной совместная синхронная работа всей группы гидродвигателей.
Наиболее близким по технической сущности к заявляемому способу является принятый в качестве прототипа способ синхронизации движения выходных звеньев нескольких объемных гидродвигателей, к каждому из которых рабочая жидкость поступает от общего гидравлического источника питания постоянного давления через индивидуальный дросселирующий гидрораспределитель с пропорциональным электрическим управлением, заключающийся в том, что на основании контроля координат выходных звеньев этих гидродвигателей увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, путем изменения площадей проходного сечения (и тем самым коэффициентов проводимости) напорных рабочих окон дросселирующих гидрораспределителей в зависимости от рассогласования координат выходных звеньев гидродвигателей [2].
Здесь и далее по тексту описания изобретения рабочая полость гидродвигателя, которая в текущий момент времени соединена посредством дросселирующего гидрораспределителя с напорной гидролинией гидравлического источника питания, называется напорной, а рабочее окно дросселирующего гидрораспределителя, через которое рабочая жидкость поступает в напорную полость гидродвигателя называется напорным рабочим окном.
При реализации вышеуказанного способа синхронизации управляющий сигнал, подаваемый со стороны контроллера на электрический блок управления дросселирующего гидрораспределителя, управляющего соответствующим гидродвигателем, и определяющий площадь проходного сечения (и, соответственно, коэффициент проводимости) напорного рабочего окна гидрораспределителя, формируют как функцию разности значений текущих заданной и фактической координат выходного звена этого гидродвигателя. В силу использования гидравлического источника питания постоянного давления скорость движения выходного звена каждого гидродвигателя при фиксированной нагрузке (силе для гидроцилиндра, вращающем моменте для гидромотора и поворотного гидродвигателя), действующей на это звено, практически однозначно определяется коэффициентом проводимости рабочего окна дросселирующего гидрораспределителя.
Недостатком данного способа являются повышенные потери энергии, обусловленные тем, что вне зависимости от нагрузки на выходных звеньях гидродвигателей в напорной гидролинии гидравлического источника питания поддерживается постоянное давление, которое может намного превышать давление, которое необходимо для преодоления нагрузки (потери же энергии при фиксированном расходе рабочей жидкости, поступающей в гидродвигатель, в первом приближении прямо пропорциональны разности давления в напорной гидролинии гидравлического источника питания и давления, необходимого для преодоления нагрузки на выходном звене гидродвигателя). Эти потери снижают коэффициент полезного действия гидропривода и приводят к излишнему нагреву рабочей жидкости, что осложняет поддержание требуемого температурного режима работы гидропривода.
Снижение потерь энергии может быть достигнуто при использовании гидравлического источника питания, давление в напорной гидролинии которого изменяется в соответствии с нагрузками, действующими на выходные звенья гидродвигателей. Однако при использовании такого источника питания обеспечиваемый им расход рабочей жидкости имеет вполне определенное текущее (ограниченное) значение, в силу чего при изменении коэффициента проводимости рабочего окна одного из дросселирующих гидрораспределителей при прочих равных условиях одновременно изменяется скорость движения выходного звена не только управляемого им гидродвигателя, но и других гидродвигателей в результате перераспределения между ними расхода жидкости, поступающей от гидравлического источника питания (то есть имеет место взаимовлияние каналов управления каждым из гидродвигателей друг на друга). Указанное перераспределение расходов происходит в зависимости от текущих значений нагрузок, действующих на выходные звенья гидродвигателей, и текущих значений коэффициентов проводимости рабочих окон управляющих ими дросселирующих гидрораспределителей и при известном способе синхронизации движения выходных звеньев нескольких (более двух) объемных гидродвигателей может привести к неустойчивой работе и даже к полной неработоспособности системы синхронизации.
Технической задачей, решаемой изобретением, является создание способа синхронизации движения выходных звеньев нескольких объемных гидродвигателей, к каждому из которых рабочая жидкость поступает от общего гидравлического источника питания через индивидуальный дросселирующий гидрораспределитель с пропорциональным электрическим управлением, обеспечивающего устойчивую работу системы синхронизации при использовании гидравлического источника питания, давление в напорной гидролинии которого определяется нагрузкой.
Для решения поставленной задачи в известном способе синхронизации движения выходных звеньев нескольких объемных гидродвигателей, к каждому из которых рабочая жидкость поступает от общего гидравлического источника питания через индивидуальный дросселирующий гидрораспределитель с пропорциональным электрическим управлением, заключающемся в том, что на основании контроля координат выходных звеньев этих гидродвигателей увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, путем изменения коэффициентов проводимости напорных рабочих окон дросселирующих гидрораспределителей в зависимости от рассогласования координат выходных звеньев гидродвигателей, согласно изобретению при использовании гидравлического источника питания, давление в напорной гидролинии которого определяется нагрузкой, на электрические блоки управления дросселирующих гидрораспределителей подают управляющие сигналы, формируемые посредством контроллера, исходя из условия обеспечения в напорной гидролинии гидравлического источника питания значения давления, превышающего максимальное значение давления в напорных полостях гидродвигателей на заданную величину, необходимую для решения задач регулирования скорости движения выходных звеньев гидродвигателей, и из условия обеспечения суммарного изменения расхода рабочей жидкости, поступающей в напорные полости гидродвигателей, равного нулю по отношению к расходу рабочей жидкости в напорной гидролинии гидравлического источника питания, на основании: значений начальных и текущих координат выходных звеньев гидродвигателей, текущего значения расхода в напорной гидролинии гидравлического источника питания, текущих значений давления в напорных полостях гидродвигателей и установленной экспериментально взаимосвязи между значениями управляющего сигнала, подаваемого на электрический блок управления дросселирующего гидрораспределителя, и коэффициента проводимости его напорного рабочего окна.
Подача на электрические блоки управления гидрораспределителей управляющих сигналов, формируемых посредством контроллера, исходя из условия обеспечения в напорной гидролинии гидравлического источника питания значения давления, превышающего максимальное значение давления в напорных полостях гидродвигателей на заданную величину, необходимую для решения задач регулирования скорости движения выходных звеньев гидродвигателей, и из условия обеспечения суммарного изменения расхода рабочей жидкости, поступающей в напорные полости гидродвигателей, равного нулю по отношению к расходу рабочей жидкости в напорной гидролинии гидравлического источника питания, на основании: значений начальных и текущих координат выходных звеньев гидродвигателей, текущего значения расхода в напорной гидролинии гидравлического источника питания, текущих значений давления в напорных полостях гидродвигателей и установленной экспериментально взаимосвязи между значениями управляющего сигнала, подаваемого на электрический блок управления дросселирующего гидрораспределителя, и коэффициента проводимости его напорного рабочего окна, - позволяет обеспечить устойчивую работу системы синхронизации движения выходных звеньев нескольких гидродвигателей при использовании в гидроприводе источника питания, давление в напорной гидролинии которого изменяется в соответствии с изменением нагрузок на выходных звеньях гидродвигателей. При этом подача (расход рабочей жидкости в напорной гидролинии) гидравлического источника питания может быть как нерегулируемой, так и регулируемой: а) непрерывно при использовании в составе гидравлического источника питания регулируемых объемных насосов или нерегулируемых объемных насосов, привод которых осуществляется от двигателей с регулируемой скоростью вращения вала; б) ступенчато (путем изменения числа используемых насосов) при использовании в составе гидравлического источника питания нескольких нерегулируемых объемных насосов. Реализация предлагаемого способа синхронизации позволяет использовать для питания гидропривода с несколькими гидродвигателями, выходные звенья которых должны перемещаться синхронно, гидравлический источник питания, давление в напорной гидролинии которого определяется нагрузкой, благодаря чему снижаются потери энергии при работе гидропривода.
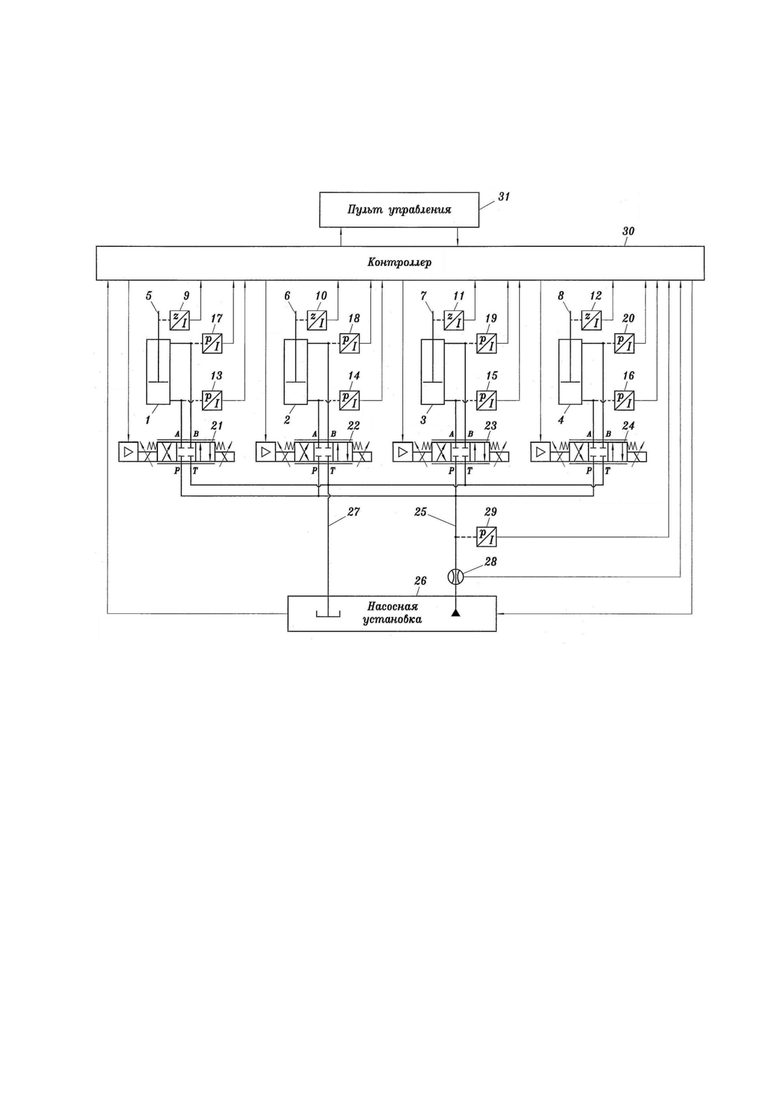
Сущность изобретения поясняется чертежом, на котором приведен один из возможных вариантов гидравлической принципиальной схемы объемного гидропривода для осуществления предлагаемого способа синхронизации движения выходных звеньев нескольких гидродвигателей.
Объемный гидропривод содержит в своем составе несколько одинаковых гидродвигателей (в данном случае четыре поршневых гидроцилиндра двухстороннего действия) 1, 2, 3, 4 с выходными звеньями (в данном случае штоками) 5, 6, 7, 8, которые для контроля их координат снабжены датчиками положения соответственно 9, 10, 11, 12. В общем случае тип гидродвигателей может быть иным (в качестве их могут использоваться плунжерные гидроцилиндры, гидромоторы или поворотные гидродвигатели).
Для дистанционного автоматического контроля давления к рабочим полостям гидродвигателя 1 (2, 3, 4) подсоединены датчики давления 13 (14, 15, 16) и 17 (18, 19, 20).
Рабочие полости гидродвигателя 1 (2, 3, 4) соединены с исполнительными каналами А и В дросселирующего гидрораспределителя 21 (22, 23, 24), напорный канал Р которого соединен с напорной гидролинией 25 гидравлического источника питания (насосной установки) 26, а сливной канал Т ― со сливной гидролинией 27 источника питания 26.
Для дистанционного автоматического контроля расхода рабочей жидкости в напорной гидролинии 25 в ней установлен датчик расхода 28, а для контроля давления к гидролинии 25 подсоединен датчик давления 29.
Гидрораспределители 21, 22, 23, 24 выполнены с пропорциональным электрическим управлением, и их электрические блоки управления электрически соединены с соответствующими выходными каналами свободно программируемого контроллера 30. Соответствующие каналы контроллера 30 электрически соединены с выходными каналами датчиков положения 9, 10, 11, 12, датчиков давления 13, …, 20, 29, датчика расхода 28 и с пультом управления 31, снабженным необходимыми органами управления и средствами визуализации (органы управления и средства визуализации на чертеже не показаны). При этом пульт управления 31 также электрически связан со всеми электрическими устройствами, входящими в состав гидравлического источника питания (насосной установки) 26.
Программное обеспечение контроллера 30 допускает работу гидропривода как в режиме синхронизации движения выходных звеньев 5, 6, 7, 8 гидродвигателей 1, 2, 3, 4, так и в режиме раздельного управления каждым из этих гидродвигателей в соответствии с командами, формируемыми с пульта управления 31.
Предлагаемый способ синхронизации движения выходных звеньев нескольких гидродвигателей реализуют следующим образом.
В режиме раздельного управления гидродвигателем 1 (2, 3, 4) его выходное звено 5 (6, 7, 8) устанавливают в требуемое положение с координатой 


При этом координаты
При выборе с пульта управления 31 работы гидропривода в режиме синхронизации движения выходных звеньев 5, 6, 7, 8 гидродвигателей 1, 2, 3, 4 в памяти контроллера 30 на основании сигналов датчиков 9, 10, 11, 12 фиксируются значения координат 



В контроллере на основании зафиксированных значений производится определение текущего максимального значения 


текущего изменения 


среднего значения 
отклонения 

среднего расхода 
расхода 
давления 

Далее производится вычисление значения коэффициента проводимости 

При этом очевидно, что суммарное изменение расхода рабочей жидкости, поступающей в напорные полости гидродвигателей, равно нулю по отношению к расходу

и перераспределение расхода рабочей жидкости, поступающей от гидравлического источника питания (насосной установки) 26, между гидродвигателями происходит таким образом, что расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении (

В вышеприведенных выражениях:


Если в результате расчетов по вышеприведенным формулам для какого-то m-го (





а для остальных гидродвигателей вычисление значений

На электрический блок управления дросселирующего гидрораспределителя, управляющего i-ым гидродвигателем, подается управляющий сигнал, при котором обеспечивается коэффициент проводимости напорного рабочего окна дросселирующего гидрораспределителя, равный вычисленному значению
Неизбежные отклонения фактических значений расходов рабочей жидкости, поступающих через соответствующие дросселирующие гидрораспределители к гидродвигателям, от расчетных значений 

В соответствии с вышеизложенным предлагаемый способ синхронизации движения выходных звеньев нескольких объемных гидродвигателей обеспечивает устойчивую работу системы синхронизации при использовании гидравлического источника питания, давление в напорной гидролинии которого определяется нагрузкой.
Литературные источники
1. Система управления приводом хода машины с двумя независимыми бортами Dual Path. Описание системы. - Sauer-Danfoss: L1111782, Rev BA, May 2011. - 24 с. (рис. на с. 7)
2. Гойдо М.Е., Бодров В.В., Багаутдинов Р.М. Выбор значений коэффициентов обратной связи электрогидравлической системы управления подвижной траверсой штамповочного пресса на этапе проектирования // Заготовительные производства в машиностроении. - 2008. - № 3. - С. 22-30 (рис. 1, формулы на с. 26).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2722767C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ВЫХОДНЫХ ЗВЕНЬЕВ ДВУХ ГИДРОДВИГАТЕЛЕЙ ОБЪЕМНОГО ГИДРОПРИВОДА | 2013 |
|
RU2542772C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2009 |
|
RU2421637C2 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ, ЧУВСТВИТЕЛЬНЫЙ К НАГРУЗКЕ | 2020 |
|
RU2759190C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2001 |
|
RU2206804C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2020 |
|
RU2759191C1 |
| СИСТЕМА КОМПЕНСАЦИИ ПОГРЕШНОСТИ ОБЕСПЕЧЕНИЯ КОВОЧНОГО РАЗМЕРА РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241566C2 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕКУПЕРАЦИИ ЭНЕРГИИ | 2018 |
|
RU2688130C1 |
Область применения: гидрофицированное оборудование, используемое в различных отраслях машиностроения, в частности в листогибочных вальцах для управления валками, в приводах прессов, проходческих щитов, подъемных и других машин и механизмов, по условиям эксплуатации которых необходимо синхронное движение выходных звеньев гидродвигателей. Техническая задача: обеспечение устойчивой работы системы синхронизации нескольких объемных гидродвигателей при использовании гидравлического источника питания, давление в напорной гидролинии которого определяется нагрузкой. Сущность: способ синхронизации движения выходных звеньев нескольких объемных гидродвигателей 1, 2, 3, 4, к каждому из которых рабочая жидкость поступает от общего гидравлического источника питания 26 через индивидуальный дросселирующий гидрораспределитель с пропорциональным электрическим управлением соответственно 21, 22, 23, 24, заключающийся в том, что увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, для чего на электрические блоки управления гидрораспределителей подают управляющие сигналы, формируемые посредством контроллера 30, исходя из условия обеспечения в напорной гидролинии 25 гидравлического источника питания 26 значения давления, превышающего максимальное значение давления в напорных полостях гидродвигателей на заданную величину, необходимую для решения задач регулирования скорости движения выходных звеньев гидродвигателей, и условия обеспечения суммарного изменения расхода рабочей жидкости, поступающей в напорные полости гидродвигателей, равного нулю по отношению к расходу рабочей жидкости в напорной гидролинии гидравлического источника питания, на основании: значений начальных и текущих координат выходных звеньев гидродвигателей, текущего значения расхода в напорной гидролинии гидравлического источника питания, текущих значений давления в напорных полостях гидродвигателей и установленной экспериментально взаимосвязи между значениями управляющего сигнала, подаваемого на электрический блок управления гидрораспределителя, и коэффициента проводимости его напорного рабочего окна. 1 ил.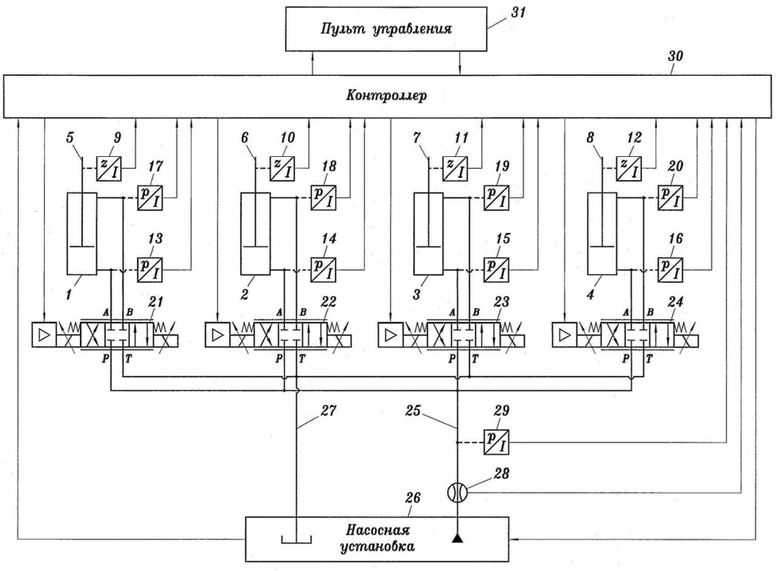
Способ синхронизации движения выходных звеньев нескольких объемных гидродвигателей, к каждому из которых рабочая жидкость поступает от общего гидравлического источника питания через индивидуальный дросселирующий гидрораспределитель с пропорциональным электрическим управлением, заключающийся в том, что на основании контроля координат выходных звеньев этих гидродвигателей увеличивают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого отстает в своем движении, и уменьшают расход рабочей жидкости, поступающей в напорную полость гидродвигателя, выходное звено которого опережает в своем движении, путем изменения коэффициентов проводимости напорных рабочих окон дросселирующих гидрораспределителей в зависимости от рассогласования координат выходных звеньев гидродвигателей, отличающийся тем, что при использовании гидравлического источника питания, давление в напорной гидролинии которого определяется нагрузкой, на электрические блоки управления дросселирующих гидрораспределителей подают управляющие сигналы, формируемые посредством контроллера, исходя из условия обеспечения в напорной гидролинии гидравлического источника питания значения давления, превышающего максимальное значение давления в напорных полостях гидродвигателей на заданную величину, необходимую для решения задач регулирования скорости движения выходных звеньев гидродвигателей, и из условия обеспечения суммарного изменения расхода рабочей жидкости, поступающей в напорные полости гидродвигателей, равного нулю по отношению к расходу рабочей жидкости в напорной гидролинии гидравлического источника питания, на основании: значений начальных и текущих координат выходных звеньев гидродвигателей, текущего значения расхода в напорной гидролинии гидравлического источника питания, текущих значений давления в напорных полостях гидродвигателей и установленной экспериментально взаимосвязи между значениями управляющего сигнала, подаваемого на электрический блок управления дросселирующего гидрораспределителя, и коэффициента проводимости его напорного рабочего окна.
| ГИДРОПРИВОД С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2722767C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ВЫХОДНЫХ ЗВЕНЬЕВ ДВУХ ГИДРОДВИГАТЕЛЕЙ ОБЪЕМНОГО ГИДРОПРИВОДА | 2013 |
|
RU2542772C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |
| US 6474063 B2, 05.11.2002 | |||
| CN 105159263 B, 19.06.2018. | |||

