Изобретение относится к области объемного гидропривода, а именно к способам регулирования электрогидравлических следящих приводов с дроссельным управлением, и, в частности, может быть использовано в приводах станков, промышленных роботов и манипуляторов, мобильных машин, самолетов, судов, прокатных станов, механизмах качания кристаллизаторов машин непрерывного литья заготовок, а также в других видах агрегатов и машин всевозможного назначения, где актуальной является проблема повышения жесткости и быстродействия приводов.
Известен способ регулирования контролируемого параметра, в частности, скорости движения выходного звена гидродвигателя электрогидравлического следящего привода, содержащего гидродвигатель и электрогидравлический усилитель, путем изменения площади проходного сечения рабочего окна электрогидравлического усилителя, включающий задание потребного значения скорости перемещения выходного звена гидродвигателя путем формирования электрического входного сигнала, поддержание оптимального перепада давлений на напорном рабочем окне электрогидравлического усилителя путем формирования гидромеханической обратной связи по соотношению давлений в нагруженной полости гидродвигателя и в напорной гидролинии источника рабочей жидкости, формирование электрического сигнала обратной связи, соответствующего фактическому давлению в напорной гидролинии, задание электрического сигнала, соответствующего номинальному давлению, деление его на сигнал, соответствующий фактическому давлению в напорной гидролинии, формирование электрического сигнала, равного квадратному корню из сигнала, полученного в результате деления, и последующее формирование электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя, равного произведению сигнала, полученного в результате извлечения квадратного корня, на величину электрического входного сигнала [1].
При изменении встречной нагрузки на выходном звене гидродвигателя данный способ обеспечивает автоматическое изменение давления питания электрогидравлического следящего привода для поддержания оптимальных по кпд режимов работы, а именно в случае изменения встречной нагрузки и соответственно соотношения давлений в нагруженной полости гидродвигателя и в напорной гидролинии источника рабочей жидкости по сравнению с оптимальным в сторону уменьшения или увеличения использование гидромеханической обратной связи приводит соответственно к увеличению или к уменьшению площади проходного сечения рабочего окна между напорной гидролинией и сливом и к регулированию за счет этого давления в напорной гидролинии до восстановления оптимального соотношения между его значением и значением давления в нагруженной полости гидродвигателя.
Для компенсации изменений расхода рабочей жидкости, поступающей через электрогидравлический усилитель к гидродвигателю, и соответственно скорости движения выходного звена гидродвигателя при работе гидропривода с переменной нагрузкой предусмотрено формирование сигнала, соответствующего номинальному давлению в напорной гидролинии, который делится на сигнал, соответствующий фактическому давлению в напорной гидролинии, формирование электрического сигнала, равного квадратному корню из сигнала, полученного в результате деления, и последующее формирование электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя, равного произведению сигнала, полученного в результате извлечения квадратного корня, на величину электрического входного сигнала.
Если фактическое давление в напорной гидролинии отличается от номинального, то сигнал, подаваемый на вход электрогидравлического усилителя, отличается от электрического входного сигнала таким образом, что обеспечивается компенсация различия упомянутых давлений, и при прочих равных условиях рабочие окна электрогидравлического усилителя открываются на величину, необходимую для поддержания заданной скорости перемещения выходного звена гидродвигателя.
В конечном итоге, благодаря известному способу в электрогидравлическом следящем приводе при работе его с переменной встречной нагрузкой должно поддерживаться оптимальное (по кпд) значение давления в напорной гидролинии при обеспечении величины контролируемого параметра выходного звена гидродвигателя (в данном случае скорости его движения), зависящей только от величины электрического входного сигнала.
Однако если фактическое давление в напорной гидролинии привода меньше номинального, то сигнал, подаваемый на вход электрогидравлического усилителя, превышает входной электрический сигнал, в тем большей степени, чем меньше фактическое давление в напорной гидролинии (определяемое текущим значением нагрузки на выходном звене гидродвигателя), и соответственно рабочие окна электрогидравлического усилителя должны открываться на большую величину. Поскольку физически возможность увеличения площади проходных сечений рабочих окон электрогидравлического усилителя ограничена некоторым значением, то при фиксированном значении электрического входного сигнала и уменьшении нагрузки и соответственно давления в напорной гидролинии привода ниже некоторого порогового уровня (этот уровень тем выше, чем больше входной электрический сигнал) дальнейшее увеличение площади проходных сечений рабочих окон электрогидравлического усилителя становится невозможным, а в результате не обеспечивается пропорциональность скорости движения выходного звена гидродвигателя величине входного сигнала. Таким образом, известный способ при малых значениях нагрузки не обеспечивает инвариантность величины контролируемого параметра выходного звена гидродвигателя к величине нагрузки, что является его недостатком.
Использование гидромеханической обратной связи по соотношению давлений в нагруженной полости гидродвигателя и в напорной гидролинии источника рабочей жидкости приводит (в силу инертности подвижных элементов гидромеханической обратной связи) к снижению быстродействия привода и увеличению динамических погрешностей в отработке электрического входного сигнала.
Согласно анализируемому способу фактическое значение текущей скорости движения выходного звена гидродвигателя не контролируется и не используется при формировании электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя. Отсутствие обратной связи по текущему значению контролируемого параметра не ограничивает величину несоответствия контролируемого параметра выходного звена гидродвигателя (в рассматриваемом случае скорости его движения) величине входного управляющего сигнала, что снижает точность работы электрогидравлического следящего привода.
Известный способ применим только для регулирования одного контролируемого параметра: скорости движения выходного звена гидродвигателя электрогидравлического следящего привода, - то есть обладает ограниченными технологическими возможностями.
Конструкция большинства электрогидравлических усилителей такова, что площадь проходных сечений их рабочих окон является нелинейной функцией величины электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя (например, из-за исполнения золотниковой пары с положительным перекрытием, из-за выполнения рабочих окон профилированными). При использовании в гидроприводе таких электрогидравлических усилителей рассматриваемый способ ни при каких условиях не обеспечивает компенсацию влияния изменений нагрузки и соответственно давления в напорной гидролинии привода на величину скорости движения выходного звена гидропривода, что сужает область применения способа или делает его менее эффективным.
Кроме того, даже при работе гидропривода на установившихся режимах соответствие скорости движения выходного звена гидродвигателя входному электрическому сигналу при реализации рассматриваемого способа возможно только при условии отсутствия утечек и перетечек рабочей жидкости на участке между электрогидравлическим усилителем и гидродвигателем (например, через зазоры в паре золотник - гильза электрогидравлического усилителя, через подвижное уплотнение между напорной и сливной полостями гидродвигателя и т.п.). При работе гидропривода на неустановившихся режимах, связанных с изменением управляющего сигнала или внешней нагрузки, появляется дополнительная погрешность в величине скорости движения выходного звена гидродвигателя, обусловленная сжимаемостью рабочей жидкости в полостях гидродвигателя и соединенных с ними гидролиниях и податливостью стенок каналов, в которые жидкость заключена. Указанная погрешность так же, как и погрешность, связанная с утечками и перетечками рабочей жидкости, согласно известному способу регулирования скорости движения выходного звена гидродвигателя электрогидравлического следящего привода никак не компенсируется. В результате известный способ не обеспечивает достаточные статическую и динамическую жесткости электрогидравлического следящего привода, следствием чего являются пониженные быстродействие гидропривода и полоса пропускания частот.
Наиболее близким к заявляемому техническому решению является взятый в качестве прототипа способ регулирования контролируемого параметра выходного звена гидродвигателя электрогидравлического следящего привода, содержащего гидродвигатель и электрогидравлический усилитель, путем изменения площади проходного сечения рабочего окна электрогидравлического усилителя, включающий задание потребного значения контролируемого параметра путем формирования электрического входного сигнала fупр, формирование электрического сигнала обратной связи по давлению в полостях гидродвигателя и в напорной и сливной гидролиниях привода и последующее формирование на основе потребного значения контролируемого параметра и сигнала обратной связи электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя. При этом электрический сигнал обратной связи по давлению в полостях гидродвигателя и в напорной и сливной гидролиниях формируют следующим образом. Сначала формируют сигнал, пропорциональный разности текущих значений давления питания p0 и перепада давлений Δp в полостях гидродвигателя: (р0-Δр). Затем осуществляют задание электрического сигнала коррекции, пропорционального требуемой эталонной разности указанных величин: (р0-Δp)э, - деление его на сигнал, пропорциональный фактической разности давлений: (р0-Δр)э/(р0-Δр), - после чего осуществляют формирование электрического сигнала, равного квадратному корню от сигнала, полученного путем деления: [(p0-Δp)э/(р0-Δp)]1/2. Формирование электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя, осуществляют путем перемножения сигнала обратной связи по давлению в полостях гидродвигателя и в напорной и сливной гидролиниях (представляющего результат извлечения квадратного корня) на величину электрического входного сигнала: [(p0-Δp)э/(p0-Δp)]1/2•fупр. Контролируемым параметром является скорость движения выходного звена гидродвигателя [2].
Согласно данному способу расход рабочей жидкости через рабочее окно электрогидравлического усилителя, а следовательно, и фактическая скорость движения выходного звена гидродвигателя задаются сигналом fупр, определяющим площадь проходного сечения рабочих окон электрогидравлического усилителя, необходимую для обеспечения движения выходного звена гидродвигателя с потребной скоростью при разности значений давления питания р0 и перепада давлений Δp в полостях гидродвигателя, равной эталонной величине (р0-Δp)э, и сигналом обратной связи [(p0-Δp)э/(p0-Δp)]1/2, предназначенным для обеспечения инвариантности скорости движения выходного звена гидропривода к изменениям давления питания р0 и перепада давлений Δp в полостях гидродвигателя (давления нагрузки).
При этом фактическое значение текущей скорости движения выходного звена гидродвигателя не контролируется и не используется при формировании электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя. Отсутствие обратной связи по текущему значению контролируемого параметра не ограничивает величину несоответствия контролируемого параметра выходного звена гидродвигателя (в рассматриваемом случае скорости его движения) величине входного управляющего сигнала, что снижает точность работы электрогидравлического следящего привода.
Известный способ применим только для регулирования одного контролируемого параметра: скорости движения выходного звена гидродвигателя электрогидравлического следящего привода, - то есть обладает ограниченными технологическими возможностями.
Конструкция большинства электрогидравлических усилителей такова, что площадь проходных сечений их рабочих окон является нелинейной функцией величины электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя (например, из-за исполнения золотниковой пары с положительным перекрытием, из-за выполнения рабочих окон профилированными). При использовании в гидроприводе таких электрогидравлических усилителей рассматриваемый способ ни при каких условиях не обеспечивает компенсацию влияния изменений давления питания р0 и перепада давлений Δр в полостях гидродвигателя на величину скорости движения выходного звена гидропривода, что сужает область применения способа или делает его менее эффективным.
Скорость движения выходного звена гидродвигателя однозначно определяется расходом рабочей жидкости, прошедшей через рабочее окно электрогидравлического усилителя, лишь при условии, что на участке между электрогидравлическим усилителем и гидродвигателем отсутствуют утечки и перетечки рабочей жидкости (например, через зазоры в паре золотник - гильза электрогидравлического усилителя, через подвижное уплотнение между напорной и сливной полостями гидродвигателя и т.п.), рабочая жидкость несжимаема, а стенки каналов и полостей, в которые она заключена, являются абсолютно жесткими. В действительности рабочая жидкость, которая прошла из напорной гидролинии через рабочее окно электрогидравлического усилителя, идет не только на заполнение пространства в напорной полости гидродвигателя, освобождающегося вследствие перемещения его выходного звена, но и на заполнение пространства, появляющегося вследствие сжимаемости самой жидкости и податливости стенок каналов и полостей, в которые она заключена (величина расхода жидкости, связанного с упругими деформациями жидкости и каналов, пропорциональна скорости изменения давления), а также уходит через зазоры в паре золотник - гильза электрогидравлического усилителя в сливную гидролинию и перетекает через подвижное уплотнение между напорной и сливной полостями гидродвигателя в сливную полость последнего (величина расхода утечек и перетечек рабочей жидкости пропорциональна перепадам давления). В результате этого при работе гидропривода появляется дополнительная погрешность в обеспечении требуемой величины скорости движения выходного звена гидродвигателя, зависящая от текущих значений давления в полостях гидродвигателя и скорости изменения давления в нагруженной полости гидродвигателя. Указанная погрешность может достигать значительной величины и согласно известному способу регулирования скорости движения выходного звена гидродвигателя никак не компенсируется. Таким образом, одним из основных недостатков известного способа является то, что он не обеспечивает достаточные статическую и динамическую жесткости электрогидравлического следящего привода, следствием чего являются пониженные быстродействие гидропривода и полоса пропускания частот.
Технической задачей, решаемой изобретением, является создание способа регулирования контролируемого параметра выходного звена гидродвигателя электрогидравлического следящего привода, обеспечивающего улучшение статических и динамических характеристик электрогидравлического следящего привода, а именно повышение жесткости привода и расширение тем самым его полосы пропускания частот и увеличение быстродействия.
Для решения поставленной задачи в известном способе регулирования контролируемого параметра выходного звена гидродвигателя электрогидравлического следящего привода, содержащего гидродвигатель и электрогидравлический усилитель, путем изменения площади проходного сечения рабочего окна электрогидравлического усилителя, включающем задание потребного значения контролируемого параметра путем формирования электрического входного сигнала, формирование электрического сигнала обратной связи по давлению в полостях гидродвигателя и в напорной и сливной гидролиниях привода и последующее формирование на основе потребного значения контролируемого параметра и сигнала обратной связи электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя, согласно изобретению дополнительно формируют электрический сигнал обратной связи по текущему значению контролируемого параметра, на основе сигналов обратной связи вычисляют величину потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя, затем формируют электрический управляющий сигнал, соответствующий на основе экспериментальных данных величине потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя, при этом величину упомянутой площади проходного сечения определяют с учетом утечек и перетечек рабочей жидкости, а также сжимаемости жидкости и податливости стенок каналов.
Дополнительное формирование электрического сигнала обратной связи по текущему значению контролируемого параметра, вычисление на основе потребного значения контролируемого параметра и сигналов обратной связи по давлению и по текущему значению контролируемого параметра величины потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя с учетом утечек и перетечек рабочей жидкости, а также сжимаемости жидкости и податливости стенок каналов создает предпосылки для выявления величины электрического управляющего сигнала, который необходимо подать на вход электрогидравлического усилителя для обеспечения значения контролируемого параметра, соответствующего электрическому входному сигналу. Использование сигнала обратной связи по текущему значению контролируемого параметра, кроме того, позволяет применять предлагаемый способ как для регулирования скорости движения, так и координаты выходного звена гидродвигателя, то есть расширяет область применения способа.
Формирование электрического управляющего сигнала (подаваемого на вход электрогидравлического усилителя), соответствующего на основе экспериментальных данных величине потребной в текущий момент времени площади проходного сечения электрогидравлического усилителя, обеспечивает независимость скорости движения выходного звена гидродвигателя от изменений давлений в напорной и сливной гидролиниях и от величины и скорости изменения давлений в полостях гидродвигателя.
Величину потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя в общем случае определяют в соответствии с выражениями:
при хупр>0
где Sp.o.A1= [AAхрассогл+kут.A(pA-pсл)+kперет(pA-pB)+VA/EadpA/dt] /{ μ[2/ρ(pп-pA)]1/2}; (2)
при xупр<0
где Sp.o.A2= K[AВxрассогл-kут.B(pB-pсл)-kперет(pB-pA)-VB/EВdpB/dt] /{ μ[2/ρ(pп-pB)]1/2}; (4)
при хупр=0
Ар.о.А=0, (5)
где хупр - исходный управляющий сигнал;
Ар.о.А - вычисленное значение величины потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя, через которое канал А электрогидравлического усилителя сообщается с напорной (при положительном значении Ар.о.А) или сливной (при отрицательном значении Ар.о.А) гидролиниями привода;
Sр.о.А1, Sр.о.А2 - варианты потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя, через которое канал А электрогидравлического усилителя сообщается с напорной или сливной гидролиниями привода;
АА, АВ - характерные размеры гидродвигателя (эффективная площадь поршня для гидроцилиндра; характерный объем для гидромотора) со стороны его рабочих полостей, подсоединенных к каналам электрогидравлического усилителя соответственно А и В;
храссогл - сигнал рассогласования;
Kут.А, Kут.B - коэффициенты утечек рабочей жидкости для участков электрогидравлического следящего привода, подсоединенных к каналам электрогидравлического усилителя соответственно А и В;
Kперет - коэффициент перетечек рабочей жидкости между полостями гидродвигателя (каналами А и В электрогидравлического усилителя);
VA, VB - текущие значения объемов рабочей жидкости в гидролиниях и полостях гидродвигателя, подсоединенных к каналам электрогидравлического усилителя соответственно А и В;
EA, EB - приведенные модули объемной упругости участков электрогидравлического следящего привода, подсоединенных к каналам электрогидравлического усилителя соответственно А и В;
μ - коэффициент расхода рабочего окна электрогидравлического усилителя;
ρ - плотность рабочей жидкости;
pп, pcл - значения давления рабочей жидкости соответственно в напорном и сливном каналах электрогидравлического усилителя;
рA, рB - значения давления рабочей жидкости в каналах соответственно А и В электрогидравлического усилителя;
K - отношение площади Aр.о.A проходного сечения рабочего окна электрогидравлического усилителя, через которое канал А усилителя сообщается со сливной гидролинией привода, к площади Aр.о.B проходного сечения рабочего окна электрогидравлического усилителя, через которое при этом его канал В сообщается с напорной гидролинией привода (K=Aр.о.A/Aр.о.В; K>0);
t - время.
В случае работы гидропривода с постоянной по направлению нагрузкой, воспринимаемой рабочей жидкостью, находящейся в полости гидродвигателя, соединенной с каналом А электрогидравлического усилителя, величину потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя предпочтительно определяют с использованием выражения:
Sp.o.A2=[AAхрассогл+kут.A(pA-pcл)+kперет(pA-pB)+VA/EAdpA/dt]/{ μ[2/ρ(pA-pсл)]1/2}. (6)
При использовании в качестве контролируемого параметра координаты z выходного звена гидродвигателя, входящего в состав электрогидравлического следящего привода, величины хупр и храссогл определяют в соответствии с выражениями:
хупр=zзад-z; (7)
храссогл=kV(zзад-z), (8)
где z - текущая координата выходного звена гидродвигателя, отсчитываемая от положения выходного звена, при котором объем рабочей полости гидродвигателя, подсоединенной к каналу А электрогидравлического усилителя, минимален;
zзaд - текущее заданное значение координаты z выходного звена гидродвигателя (входной сигнал);
kv - коэффициент усиления.
При использовании в качестве контролируемого параметра скорости движения v выходного звена гидродвигателя величины xупр и xрассогл определяют в соответствии с выражениями:
xупр=vзад; (9)
xрассогл=kynpvзaд-kocv, (10)
где v- текущая скорость движения выходного звена гидродвигателя (v= dz/dt);
vзад - текущее заданное значение скорости движения v выходного звена гидродвигателя (входной сигнал);
kупр, kос - коэффициенты усиления.
Оптимальным является следующее соотношение между коэффициентами kупр и kос
kупр=1+kос. (11)
При использовании в качестве гидродвигателя гидроцилиндра или поворотного гидродвигателя текущие значения объемов рабочей жидкости в гидролиниях и полостях гидродвигателя, подсоединенных к каналам электрогидравлического усилителя соответственно А и В, определяются в соответствии с выражениями:
VA=VA0+AAz; (12)
VB=VB0+AB(H-z), (13)
где VA0, VB0 - минимальные значения объемов рабочей жидкости в гидролиниях и полостях гидродвигателя, подсоединенных к каналам электрогидравлического усилителя соответственно А и В (при соответствующих крайних положениях выходного звена гидродвигателя);
H - полный ход выходного звена гидродвигателя.
Для подтверждения сказанного выше о достоинствах предлагаемого способа регулирования контролируемого параметра выходного звена гидродвигателя электрогидравлического следящего привода и доказательства решения при его применении поставленной технической задачи рассмотрим, например, случай, когда: xупр>0.
При этом канал А электрогидравлического усилителя сообщается с напорной гидролинией привода через открытое рабочее окно, потребная площадь Ар.о.А проходного сечения которого имеет значение, определяемое выражениями (1) и (2) (понятие каналов А и В усилителя условно: любой из рабочих каналов усилителя, предназначенных для соединения с полостями гидродвигателя, может считаться каналом А или В, тогда другой соответственно считается каналом В или А).
Расход QA рабочей жидкости через рассматриваемое рабочее окно составляет
QA=μAр.о.А[2/ρ(pп-рA)]1/2. (14)
С учетом утечек и перетечек рабочей жидкости, а также сжимаемости жидкости и податливости стенок каналов и полостей, в которых она заключена, в соответствии с уравнением неразрывности скорость v движения выходного звена гидродвигателя (положительное значение скорости соответствует соединению канала А электрогидравлического усилителя с напорной гидролинией привода) связана с расходом QA, поступающим из напорной линии гидропривода в канал А электрогидравлического усилителя, следующим образом:
QA=AAv+kут.A(pA-pсл)+kперет(pA-pB)+VA/ЕAdpA/dt. (15)
После подстановки в уравнение (15) выражения расхода QA из соотношения (14) с учетом выражений (1) и (2) (для случая Sр.о.A1>0) получаем
v=xрассогл. (16)
В случае, когда xупр < 0 - канал В электрогидравлического усилителя сообщается с напорной гидролинией привода через открытое рабочее окно, потребная площадь Ар.о.в проходного сечения которого связана с площадью Ар.о.А проходного сечения рабочего окна, через которое при этом канал А электрогидравлического усилителя сообщается со сливной линией гидропривода, соотношением
Ар.о.в=Ар.о.А/K. (17)
Расход рабочей жидкости QB, поступающей в канал В электрогидравлического усилителя из напорной линии гидропривода, составляет
QB=μAр.o.в[2/ρ(pп-pв)]1/2. (18)
При этом в соответствии с уравнением неразрывности
Qв=AВv-kут.B(pB-pcл)-kперет(pв-pA)-VB/EвdpB/dt. (19)
На основании соотношений (18), (19), (17), (3) и (4) (для случая Sp.o.A2<0), получаем
v=хрaссогл. (20)
Очевидно, что выражения (16) и (20) совпадают. Как следует из указанных выражений, при реализации предлагаемого способа регулирования контролируемого параметра выходного звена гидродвигателя скорость перемещения выходного звена гидродвигателя при движении его в любом направлении (в пределах погрешности проведенных математических выкладок, связанной с переменностью в процессе работы гидропривода целого ряда его характеристик, в частности коэффициентов утечек и перетечек рабочей жидкости, приведенного модуля упругости и т.п.) оказывается инвариантной к величине нагрузки на выходном звене гидродвигателя (в пределах рабочего диапазона) и к характеру изменения нагрузки, колебаниям давления в напорном и сливном каналах электрогидравлического усилителя, а зависит лишь от величины сигнала рассогласования - храссогл.
При хупр= 0, а также в случаях, когда хупр>0, но Sp.o.А1≤0, или хупр<0, но Sр.о.A1≥0 (то есть при управляющем сигнале, равном нулю, а также при управляющем сигнале, не равном нулю, но физическом несоответствии знака величины Sp.o.A1 знаку управляющего сигнала) площадь Ap.o.A принимает нулевое значение, что соответствует запиранию полостей гидродвигателя и приводит или к снижению скорости движения выходного звена гидродвигателя до нуля, то есть его остановке (при хупр=0), или к стабилизации переходных процессов в гидроприводе (при хупр≠0).
В случае работы гидропривода с постоянной по направлению нагрузкой, воспринимаемой рабочей жидкостью, находящейся в полости гидродвигателя, соединенной с каналом А электрогидравлического усилителя (понятие каналов А и В усилителя условно), величину потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя предпочтительнее определять в зависимости от величины и характера изменения давления в нагруженной полости гидродвигателя, то есть в полости, соединенной с каналом А, вне зависимости от знака управляющего сигнала, используя для определения величины Sp.o.А2 выражение (6) вместо применимого при любом направлении действия нагрузки выражения (4). Дело в том, что в более нагруженной полости гидродвигателя и соединенных в ней гидролиниях в меньшей степени проявляется влияние содержащегося в рабочей жидкости газа на текущее значение ее модуля упругости, вследствие чего при изменении условий работы привода погрешность в вычислении потребного в текущий момент времени значения площади проходного сечения рабочего окна электрогидравлического усилителя уменьшается, что способствует повышению жесткости электрогидравлического привода. Выражение (20) при использовании выражения (6) остается справедливым.
В зависимости от характера контролируемого параметра выходного звена гидродвигателя исходный сигнал управления хупр и сигнал рассогласования храссогл определяются по-разному.
При использовании в качестве контролируемого параметра координаты z выходного звена гидродвигателя исходный сигнал управления хупр и сигнал рассогласования храссогл вычисляются по выражениям соответственно (7) и (8). В соответствии с выражением (8) сигнал рассогласования, а согласно выражению (20) и текущая скорость движения v выходного звена гидродвигателя прямо пропорциональны отклонению текущего значения координаты z от его заданного значения zзaд.
При использовании в качестве контролируемого скорости движения v выходного звена гидродвигателя сигнал управления хупр и сигнал рассогласования xрассогл вычисляются по выражениям соответственно (9) и (10). Для указанного случая на основании выражений (20) и (10) имеем:
v=kупрvзад/(1+koc), (21)
то есть текущая скорость движения v выходного звена гидродвигателя прямо пропорциональна текущему заданному значению vзaд скорости движения (входному сигналу).
Соотношение между коэффициентами kупр и kос, представленное в виде выражения (11), является оптимальным, поскольку при этом обеспечивается полное соответствие между текущим значением скорости движения v выходного звена гидродвигателя и ее текущим заданным значением vзад. При выполнении соотношения (11), исходя из выражения (21), получаем
v=vзaд. (22)
При использовании в качестве гидродвигателя гидроцилиндра или поворотного гидродвигателя текущие значения объемов VA и VB рабочей жидкости в гидролиниях и полостях гидродвигателя, подсоединенных к каналам электрогидравлического усилителя соответственно А и В, определяют с учетом текущей координаты z выходного звена гидродвигателя в соответствии с выражениями (12), (13). Это уменьшает погрешность в вычислении потребного в текущий момент времени значения площади проходного сечения рабочего окна электрогидравлического усилителя, что способствует повышению жесткости электрогидравлического привода.
В связи со снижением влияния утечек и перетечек рабочей жидкости, сжимаемости рабочей жидкости и податливости стенок гидравлических каналов на скорость движения выходного звена гидродвигателя рассматриваемый способ регулирования контролируемого параметра электрогидравлического следящего привода по сравнению с известным при прочих равных условиях обеспечивает улучшение статических и динамических характеристик электрогидравлического следящего привода, а именно повышение жесткости привода и расширение тем самым его полосы пропускания частот и увеличение быстродействия.
На чертеже изображена схема электрогидравлического следящего привода для осуществления способа регулирования контролируемого параметра выходного звена гидродвигателя электрогидравлического следящего привода.
Электрогидравлический следящий привод содержит задатчик 1 контролируемого параметра, гидродвигатель 2, рабочие полости которого подключены к рабочим (исполнительным) каналам А и В электрогидравлического усилителя 3, соединенного своим напорным каналом Р с напорной гидролинией 4 и сливным каналом Т со сливной гидролинией 5 привода, систему формирования сигнала обратной связи, выполненную в виде датчика 6 контролируемого параметра выходного звена гидродвигателя 2, датчика 7 давления в канале А электрогидравлического усилителя 3, датчика 8 давления в канале В электрогидравлического усилителя 3, датчика 9 давления в напорном канале Р электрогидравлического усилителя 3, датчика 10 давления в сливном канале Т электрогидравлического усилителя 3. Выходы датчиков 6, 7, 8, 9, 10 и выход задатчика 1 контролируемого параметра подключены к входам блока 11 вычисления потребного значения площади проходного сечения рабочего окна электрогидравлического усилителя 3. В свою очередь, выход блока 11 подключен к входу блока 12 формирования электрического управляющего сигнала, выход которого, в свою очередь, подключен через электронный усилитель 13 к управляющему входу электрогидравлического усилителя 3. Блоки 11, 12 и 13 в совокупности образуют блок коррекции 14. При мощности электрического сигнала на выходе блока 12 формирования электрического управляющего сигнала, достаточной для управления электрогидравлическим усилителем 3, электронный усилитель 13 в составе блока коррекции 14 может отсутствовать.
Регулирование контролируемого параметра выходного звена гидродвигателя 2 электрогидравлического следящего привода осуществляется следующим способом.
На вход блока коррекции 14 (блока 11 вычисления потребного значения площади проходного сечения рабочего окна электрогидравлического усилителя 3) постоянно поступают электрический входной сигнал от задатчика 1 контролируемого параметра, сигнал обратной связи по текущему значению контролируемого параметра (скорости движения или координате выходного звена гидродвигателя 2) от датчика 6 контролируемого параметра, сигналы обратной связи по давлению в рабочих А и В, напорном Р и сливном Т каналах электрогидравлического усилителя 3 от датчиков давления соответственно 7, 8, 9 и 10. На основе перечисленных сигналов в блоке 11 в соответствии с выражениями (1)-(13) с учетом утечек и перетечек рабочей жидкости, а также сжимаемости жидкости и податливости стенок каналов производится вычисление потребной в текущий момент времени величины площади проходного сечения рабочего окна электрогидравлического усилителя 3. Полученное значение площади передается в блок 12 формирования электрического управляющего сигнала. В блоке 12 формируется электрический управляющий сигнал, соответствующий на основе экспериментальных данных величине потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя 3, который через электронный усилитель 13 поступает на управляющий вход электрогидравлического усилителя 3. При этом площадь проходного сечения рабочих окон электрогидравлического усилителя 3 изменяется таким образом, что скорость перемещения выходного звена гидродвигателя при движении его в любом направлении (в пределах погрешности проведенных вычислений, связанной с переменностью в процессе работы гидропривода целого ряда его характеристик, в частности, коэффициентов утечек и перетечек рабочей жидкости, приведенного модуля упругости и т.п.) оказывается инвариантной к величине нагрузки на выходном звене гидродвигателя (в пределах рабочего диапазона) и к характеру изменения нагрузки, колебаниям давления в напорном и сливном каналах электрогидравлического усилителя, а зависит лишь от величины сигнала рассогласования xрaссогл.
Применение заявляемого способа в электрогидравлических следящих приводах с дроссельным управлением станков, промышленных роботов и манипуляторов, самолетов, судов, прокатных станов, мобильных и других машин позволяет повысить жесткость приводов (с соответствующими расширением полосы пропускания частот и увеличением быстродействия) и тем самым повысить эффективность их использования.
Литературные источники
1. Гидравлический следящий привод. Авторское свидетельство СССР 1135929, MKИ6 F 15 В 9/03. Заявлено 17.10.83. Опубликовано 23.01.85.
2. Гидропривод дроссельного регулирования. Авторское свидетельство СССР 1225932, МКИ6 F 15 В 9/03. Заявлено 02.04.84. Опубликовано 23.04.86.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ ВИБРОСТЕНДА | 2017 |
|
RU2671928C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2020 |
|
RU2759191C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ, ЧУВСТВИТЕЛЬНЫЙ К НАГРУЗКЕ | 2020 |
|
RU2759190C1 |
| ГИДРОПРИВОД С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2722767C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ВЫХОДНЫХ ЗВЕНЬЕВ НЕСКОЛЬКИХ ОБЪЕМНЫХ ГИДРОДВИГАТЕЛЕЙ | 2022 |
|
RU2778591C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2009 |
|
RU2421637C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ВЫХОДНЫХ ЗВЕНЬЕВ ДВУХ ГИДРОДВИГАТЕЛЕЙ ОБЪЕМНОГО ГИДРОПРИВОДА | 2013 |
|
RU2542772C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕКУПЕРАЦИИ ЭНЕРГИИ | 2018 |
|
RU2688130C1 |
Способ предназначен для объемного гидропривода. На вход блока коррекции постоянно поступают электрический входной сигнал от задатчика контролируемого параметра, сигнал обратной связи по текущему значению контролируемого параметра от датчика контролируемого параметра, сигналы обратной связи по давлению в рабочих А и В, напорном Р и сливном Т каналах электрогидравлического усилителя от датчиков давления. На основе перечисленных сигналов в блоке вычисления с учетом утечек и перетечек рабочей жидкости, а также сжимаемости жидкости и податливости стенок каналов производится вычисление потребной в текущий момент времени величины площади проходного сечения рабочего окна электрогидравлического усилителя. Полученное значение площади передается в блок формирования электрического управляющего сигнала. В последнем формируется электрический управляющий сигнал, соответствующий на основе экспериментальных данных величине потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя, который через электронный усилитель поступает на управляющий вход электрогидравлического усилителя. Технический результат - улучшение статических и динамических характеристик электрогидравлического следящего привода. 1 ил.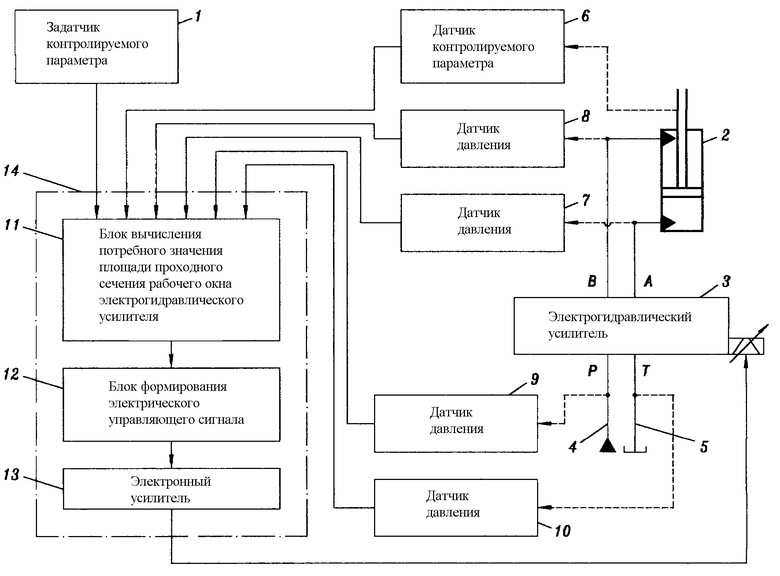
Способ регулирования контролируемого параметра выходного звена гидродвигателя электрогидравлического следящего привода, содержащего гидродвигатель и электрогидравлический усилитель, путем изменения площади проходного сечения рабочего окна электрогидравлического усилителя, включающий задание потребного значения контролируемого параметра путем формирования электрического входного сигнала, формирование электрического сигнала обратной связи по давлению в полостях гидродвигателя и в напорной и сливной гидролиниях привода и последующее формирование на основе потребного значения контролируемого параметра и сигнала обратной связи электрического управляющего сигнала, подаваемого на вход электрогидравлического усилителя, отличающийся тем, что дополнительно формируют электрический сигнал обратной связи по текущему значению контролируемого параметра, на основе сигналов обратной связи вычисляют величину потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя, затем формируют электрический управляющий сигнал, соответствующий на основе экспериментальных данных величине потребной в текущий момент времени площади проходного сечения рабочего окна электрогидравлического усилителя, при этом величину упомянутой площади проходного сечения определяют с учетом утечек и перетечек рабочей жидкости, а также сжимаемости жидкости и податливости стенок каналов.
| Гидропривод дроссельного регулирования | 1984 |
|
SU1225932A1 |
| Гидравлический следящий привод | 1983 |
|
SU1135929A1 |
| Способ переключения скорости электрогидравлического следящего привода при касании рабочим органом объекта воздействия | 1992 |
|
SU1834992A3 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| US 5218990 А, 15.01.1993. | |||

