Изобретение относится к области гироскопических систем ориентации преимущественно кораблей, предназначено для выработки с высокой точностью углов ориентации площадки корабля с учетом деформации корпуса корабля в месте расположения потребителя углов ориентации и имеющего центральный гироазимутгоризонт (ГАГ).
Эффективность использования различных систем вооружения корабля зависит от точности определения истинных параметров ориентации. Определение истинных углов ориентации в местах размещения упомянутых систем на практике затруднено из-за деформации корпуса корабля. Диапазон угловой деформации корабля в зависимости от его класса может колебаться от единиц угловых минут до одного градуса. Требуемая точность измерения деформации по всем угловым координатам составляет 1 угл.мин (1σ).
Для учета деформаций корабля в настоящее время используются специальные измерительные системы: оптические, пьезометрические, механические [Берман З.М., Зельдович С.М., Окон И.М., Ривкин С.С. Определение параметров качки корабля с учетом деформации. Л., ЦНИИ «РУМБ», 1989 г., стр.32-34], результаты измерений которых используются для корректировки углов ориентации ГАГ. Недостатками этих систем является их дороговизна и неудобства в эксплуатации.
Известен способ учета деформации корпуса корабля при выработке углов ориентации любой площадки, основанный на использовании точных систем гироскопической стабилизации [Берман З.М., Зельдович С.М., Окон И.М., Ривкин С.С. Определение параметров качки корабля с учетом деформации. Л., ЦНИИ «РУМБ», 1989 г., стр.40]. На основании измерений углов ориентации в разных точках корабля находят математическую модель упругой линии корабля (например, полином второго порядка). Используя эту информацию, определяют углы деформации корабля в месте потребителя информации, где ГАГ отсутствует. По этим данным рассчитываются углы качки и курса корабля в указанной точке с учетом деформации. Данный способ, также как и первый, отличается высокой стоимостью используемого оборудования. В настоящее время появились недорогие, малогабаритные гироазимутгоризонткомпасы, построенные по бесплатформенному принципу [Блажнов Б.А., Несенюк Л.П., Пешехонов В.Г., Старосельцев Л.П. Миниатюрные интегрированные системы ориентации и навигации для гидрографических судов и катеров, Гироскопия и навигация, №4, 2000 г.]. Предельные погрешности построения вертикали и определения курса для таких систем соответственно составляют (1-10) угл.мин и (30-60) угл.мин. Высокая погрешность определения углов ориентации - основная причина, которая сдерживает применение таких систем для учета деформаций корабля.
Известен также способ учета деформаций при определении ориентации корабля с использованием двух триад датчиков угловых скоростей (ДУС) [Берман З.М., Зельдович С.М., Окон И.М., Ривкин С.С. Определение параметров качки корабля с учетом деформации. Л., ЦНИИ «РУМБ», 1989 г., стр.102-112], реализуемый при совместной работе с ГАГ (его корректировки), в котором применяется стандартная процедура фильтра Калмана. В соответствии с этим способом для малых углов рассогласований (деформации) уравнения измерений имеют вид [Берман З.М., Зельдович С.М., Окон И.М., Ривкин С.С. Определение параметров качки корабля с учетом деформации. Л., ЦНИИ «РУМБ», 1989 г.; Alan M. Schneider. Kalman Filter Formulations for Transfer Alignment of Strapdowm lnertialunits. Navigation. l983. Vol.30, №1. - P.72-89]:
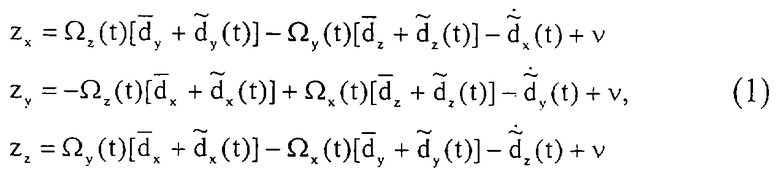
где zx,y,z - разность измерений между соответствующими ДУСами,
Ωx,y,z - проекции угловой скорости на связанную систему координат (СК) корабля,
 x,y,z - статические или квазистатические рассогласования углов связанных систем координат (СК) в точках О и О', обусловленные суточными или сезонными температурными деформациями (неупругие деформации) или перезагрузкой корабля (упругие деформации),
x,y,z - статические или квазистатические рассогласования углов связанных систем координат (СК) в точках О и О', обусловленные суточными или сезонными температурными деформациями (неупругие деформации) или перезагрузкой корабля (упругие деформации),
 - динамические рассогласования углов связанных СК в точках О и О', обусловленные волнением моря,
- динамические рассогласования углов связанных СК в точках О и О', обусловленные волнением моря,
ν - погрешность измерения угловой скорости.
Необходимость углового движения корабля для оценки постоянных деформаций следует из матрицы измерения (1).
Динамика оцениваемого процесса (деформаций) описывается следующей системой дифференциальных уравнений

где  - дисперсия угла деформации;
- дисперсия угла деформации;
μ - коэффициент нерегулярности;
λ - преобладающая частота деформации.
Этот способ исследован в работах [Система азимутальной привязки. ЦНИИ «Электроприбор», 1993 г.; Вайсгант И.Б., Тупысев В.А., Тюменева Г.В. О точности определения угловых деформаций корабля при использовании гироскопических датчиков. Судостроительная промышленность, серия «Навигация и гироскопия», вып.27, 1990 г.; Вайсгант И.Б., Тупысев В.А., Тюменева Г.В. Чувствительность фильтра Калмана в задаче определения деформации корпуса корабля. «Гироскопия и навигация», №2, 1993 г.]. При моделировании задачи определения углов деформаций с помощью фильтра Калмана для измерений (1) и вектора состояния (2) с учетом возможности применения его на кораблях разного типа, т.е. работы в различных условиях волнения и имеющих место деформаций корпуса, параметры, характеризующие уравнение (2), варьировались в достаточно широких пределах. Эти пределы связаны также со значительной априорной неопределенностью знаний в настоящее время зависимости параметров динамических деформаций от волнения моря.
Таким образом, оценки точности производились при вариации параметров качки, деформации ошибок измерения в следующих пределах:
- бортовая качка с амплитудой 14 град и периодом 7 с;
- килевая с амплитудой 3 град и периодом 9 с,
- рыскание с амплитудой 4 град и периодом 30 с.
- статическое рассогласование:  угл. мин;
угл. мин;  угл.мин;
угл.мин;  угл. мин;
угл. мин;
- переменные деформации в пределах:  угл.мин;
угл.мин;  угл. мин;
угл. мин;  угл.мин и параметрами μx,y,z=0,05-0,1 1/с; λx,y,z=0,7-0,8 1/с (преобладающая частота изменения деформации близка или равна частоте килевой качки).
угл.мин и параметрами μx,y,z=0,05-0,1 1/с; λx,y,z=0,7-0,8 1/с (преобладающая частота изменения деформации близка или равна частоте килевой качки).
При проведении моделирования предполагалось использование в качестве ДУС лазерного гироскопа КМ11 с эквивалентной ошибкой 0,1 угл.с/с (1σ).
Моделирование показало (считая допустимый уровень (1σ) порядка 1 угл. мин):
1) Сравнительно быстро (за 1-2 мин) оцениваются динамические деформации по всем трем осям (хорошая наблюдаемость этих величин связана с измерением их производных с единичным весом).
2) Статические рассогласования относительно поперечной и вертикальной осей также оцениваются достаточно точно, но за время 3-5 мин.
3) Погрешность оценки рассогласования относительно продольной оси корабля при тех же условиях качки за время порядка 10 минут не может быть признана удовлетворительной. Такую ситуацию нетрудно объяснить, используя выражение наблюдений (1), где коэффициенты при величине  определяются относительно слабой килевой качкой и небольшой угловой скоростью рыскания.
определяются относительно слабой килевой качкой и небольшой угловой скоростью рыскания.
4) Наиболее сложный случай возникает при наличии статических и динамических деформаций одного и достаточно существенного уровня. В этом случае, практически не наблюдаема составляющая статической деформации относительно продольной оси, а относительно поперечной и вертикальной осей уровень ошибок превышает допустимый в 5-8 раз.
5) Моделирование показало, что при более низком уровне динамических деформаций с большей точностью оцениваются статические составляющие при прочих равных условиях.
6) Для ускорения процесса определения статической составляющей относительно продольной оси может быть выполнен специальный маневр по курсу (типа "зигзаг").
Моделирование [Технический отчет «Моделирование задачи ОФК ИДК (вариант «ω»). ЦНИИ «Электроприбор», 2003 г.] показало также, что применение в качестве ДУС ВГ951 с погрешностью 25 угл.с/с и выше дает расходящиеся оценки фильтра Калмана. Положительные результаты получаются только для ЛГ типа КМ11 с погрешностями 0.1 угл.с/с.
Углы ориентации рассматриваемой площадки окончательно вычисляются по следующим формулам

Недостатками рассмотренного способа являются:
1) необходимость организации специального углового движения корабля для оценки статической деформации;
2) предъявление высоких требований к ошибке (1σ) ДУС - порядка (0.1-3) угл.с/с;
3) стоимость КМ11 составляет более 10000$, т.е. дороже волоконно-оптического гироскопа типа ВГ951 примерно в пять раз;
4) задача определения углов ориентации с учетом деформации не всегда может быть успешно решена, например, как выше указывалось, при одновременном высоком уровне статической и динамической деформаций.
Прототипом предлагаемого способа взят способ определения углов ориентации, описанный в литературе [Берман З.М., Зельдович С.М., Окон И.М., Ривкин С.С. Определение параметров качки корабля с учетом деформации. Л., ЦНИИ «РУМБ», 1989 г., стр.48-52], на кораблях, содержащих ГАГ, триады ДУС и триаду акселерометров. В соответствии с этим способом определения углов ориентации любой площадки упругодеформируемого корабля при организации совместной работы ГАГ и двух триад датчиков угловых скоростей (ДУС), расположенных около ГАГ и на площадке для которой необходимо определить углы ориентации, по разности показаний двух триад ДУС определяют углы деформации dx, dy, dz путем интегрирования уравнений Эйлера или Пуассона. Недостатком данного способа являются чрезвычайно высокие требования к точности ДУС для определения деформаций корабля на частоте качки [Берман З.М., Зельдович С.М., Окон И.М., Ривкин С.С. Определение параметров качки корабля с учетом деформации. Л., ЦНИИ «РУМБ», 1989 г., стр.62-63]. Общим принципом рассмотренных выше способов учета деформаций является коррекция показаний центрального гироазимутгоризонта с использованием приближенных формул типа (3).
Таким образом, в вышеперечисленных способах для измерений деформаций используется пара однотипных высокоточных триад ДУС, а сам центральный ГАГ для выработки деформаций не используется, что также приводит и к избыточности используемой аппаратуры.
Задачами, которые решаются предлагаемым изобретением, являются:
- повышение точности измерения углов деформации и углов ориентации с учетом деформации и, как следствие, использование дешевых волоконно-оптических гироскопов;
- оперативный учет квазистатических деформаций по углам качек;
- отказ от искусственного маневра с целью уточнения квазистатических деформаций по углам качек;
- уменьшение используемого оборудования (триад ДУС).
Решение этих задач достигается тем, что способ учета деформаций при определении углов ориентации на кораблях, содержащих ГАГ, триады ДУС и триаду акселерометров, оценивающий деформации корабля путем интегрирования уравнений Эйлера по сигналам ДУС и корректирующий углы ориентации ГАГ, в соответствии с заявляемым техническим решением дополнен следующими операциями:
- высокочастотным комплексированием сигналов триады ДУС с сигналами углов ориентации ГАГ для частот деформации ω>ωmin дин.;
- низкочастотной коррекцией углов ориентации ГАГ с использованием инерциальных компенсированных по сигналам внешнего измерителя скорости контуров для частот деформации ω<ωmin дин.,
где ωmin дин. - минимальная динамическая деформация.
Предлагаемый способ отличается от прототипа тем, что углы ориентации в месте потребителя определяют путем комплексирования углов ориентации, выработанных по измерениям пространственно разнесенных блока триад датчиков угловых скоростей путем интегрирования, например, уравнения Эйлера, и углов ориентации гироазимутгоризонта, разности углов ориентации, полученных путем интегрирования уравнений Эйлера, и углов ориентации гироазимутгоризонта подают на изодромные элементы и замыкают контура комплексирования по углам качек и курса путем суммирования выходов изодромных элементов с входами интеграторов уравнений Эйлера, при этом комплексирующие фильтры, на которые подают сигналы датчиков угловых скоростей, представляют полосовые фильтры второго порядка с постоянной времени Т, выходы сигналов акселерометров проектируют на горизонтальную плоскость, используя комплексированные углы ориентации, интегрируют горизонтальное ускорение по продольной оси корабля, пропускают разность инерциальной продольной скорости и продольной скорости внешнего источника через демпфирующий фильтр и суммируют выход демпфирующего фильтра с текущим значением инерциальной скорости, делят скорость на радиус Земли и вторично интегрируют, углом, полученным после вторичного интегрирования, корректируют угол дифферента гироазимутгоризонта путем их суммирования, интегрируют ускорение по поперечной оси, пропускают разность скоростей инерциальной поперечной скорости и поперечной скорости внешнего источника информации через демпфирующий фильтр и суммируют выход демпфирующего фильтра с текущим значением инерциальной поперечной скорости, делят поперечную скорость корабля на радиус Земли и вторично интегрируют, делят угол, полученный после второго интегрирования, на косинус дифферента и полученным углом коррекции по бортовой качке корректируют угол бортовой качки гироазимутгоризонта путем их суммирования, причем на выходы демпфирующих фильтров по продольному и поперечному каналам подают компенсирующие сигналы скорости с внешнего источника информации, при этом значение постоянных времени компенсирующих фильтров по углам качек равно 806 секундам.
Предложен вариант способа определения деформации корабля, который отличается тем, что статическую или квазистатическую деформацию вокруг вертикальной оси связанной системы координат оценивают путем организации естественной или искусственной качки корабля, используя разность измерений по качкам гироазимутгоризонта и комплексированных измерений углов качек, корректируют курс гироазимутгоризонта на оцененные статические деформации.
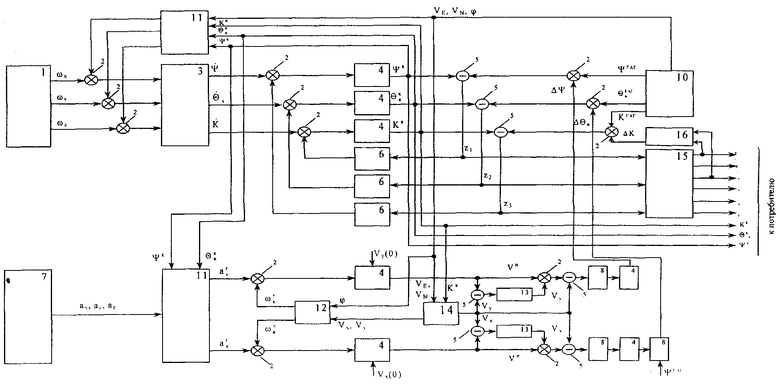
Данное изобретение поясняется чертежом, где изображено устройство, позволяющее реализовать способ определения деформаций и углов ориентации корабля с учетом деформаций, которое содержит следующие элементы и блоки:
1. Блок ДУС, ориентированных по трем осям системы координат, связанной с объектом.
2. Сумматоры.
3. Преобразователь координат, вырабатывающий по сигналам ДУС угловые скорости качек и курса.
4. Интеграторы.
5. Устройства сравнения.
6. Блоки изодромных звеньев по каналам углов качки и курса.
7. Блок акселерометров, ориентированных по связанным осям объекта.
8. Масштабирующие усилители.
9. Блок поправок на вращение Земли и собственное движение объекта.
10. ГАГ.
11. Преобразователь координат, вырабатывающий по сигналам триады акселерометров горизонтальные ускорения вдоль продольной и поперечной осям корабля.
12. Блок компенсации кориолисовых ускорений.
13. Демпфирующие фильтры Шулеровских контуров по продольной и поперечной осям корабля.
14. Преобразователь координат, перепроектирующий скорость из географической системы координат в связанную систему координат.
15. Блок линейного фильтра Калмана (ФК), оценивающий квазистатические  и динамические
и динамические  деформации.
деформации.
16. Корректор курса комплексированного измерителя углов ориентации.
Предложенный способ определения углов деформации и углов ориентации с учетом деформации реализуется следующим образом.
Выходы углов ориентации ГАГ (блок 10) сравнивают (блоки 5) с углами ориентации, выработанными по сигналам триады ДУС (блок 1) путем интегрирования уравнений Эйлера (блоки 3, 4) по формулам 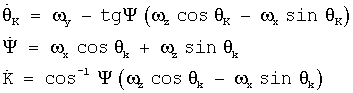
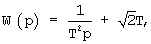
(блок 3), разности углов ориентации подают на изодромные звенья (блоки 6) по каналам углов качек и курса соответственно, передаточные функции изодромных звеньев имеют следующий вид
по каждому каналу выходы (углов ориентации) изодромных звеньев суммируют (блоки 2) с входами интеграторов (4) уравнений Эйлера, на выходе первого, второго и третьего интеграторов 4 получают комплексированные оценки углов ориентации (тангажа ψ, крена θk и курса К), при движении корабля сигналы, пропорциональные угловым скоростям ωx, ωy, ωz с триады ДУС (блок 1), корректируют в блоке суммирования 2 поправками на вращение Земли и собственное движение объекта (блок 9), постоянные и медленно меняющиеся помехи в сигналах ДУС (блок 1) компенсируют интеграторами изодромных звеньев в цепях обратных связей, постоянные и медленно меняющиеся помехи в сигналах углов ориентации ГАГ проходят на выход комплексированного измерителя и представляют собой погрешность измерения. Полученные суммарные сигналы являются комплексированными сигналами угловых скоростей качек и курса  далее поступают на интеграторы 4. Сформированные таким образом в интеграторах 4 углы ψ, θк, К являются выходными комплексироваными оценками углов ориентации предлагаемого способа измерений углов ориентации с учетом динамической деформации для частот деформации
далее поступают на интеграторы 4. Сформированные таким образом в интеграторах 4 углы ψ, θк, К являются выходными комплексироваными оценками углов ориентации предлагаемого способа измерений углов ориентации с учетом динамической деформации для частот деформации 
Коррекцию углов качки для частот деформации  реализуют следующим образом.
реализуют следующим образом.
Выходы сигналов акселерометров (блок 7) проектируют на горизонтальную плоскость, используя комплексированные углы ориентации, по формуле
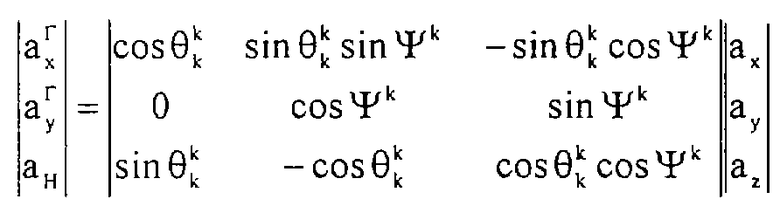
интегрируют горизонтальное ускорение по продольной оси корабля (блок 4), компенсируют кориолисово ускорение (блок 12), пропускают разность инерциальной продольной скорости и продольной скорости внешнего источника источника через демпфирующий фильтр (блок 13) с передаточной функцией Fдемпф(р) и суммируют (блок 2) выход демпфирующего фильтра с текущим значением инерциальной скорости, делят скорость на радиус Земли (блок 8) и вторично интегрируют (блок 4), углом, полученным после второго интегрирования, корректируют угол дифферента гироазимутгоризонта путем их суммирования, интегрируют ускорение по поперечной оси корабля (блок 4), компенсируют кориолисово ускорение (блок 12), пропускают разность скоростей инерциальной поперечной скорости и поперечной скорости внешнего источника через демпфирующий фильтр (блок 13) с передаточной функцией Fдемпф(р) и суммируют (блок 2) выход демпфирующего фильтра с текущим значением поперечной инерциальной скорости, делят поперечную скорость на радиус Земли (блок 8) и вторично интегрируют (блок 4), делят угол, полученный после вторичного интегрирования, на косинус дифферента (блок 8) и, полученным углом коррекции по бортовой качке корректируют угол бортовой качки гироазимутгоризонта путем их суммирования, причем на выходы демпфирующих фильтров по продольному и поперечному каналам подают компенсирующие сигналы скорости с внешнего источника, преобразованные в связанные оси (блок 14), статические и динамические деформации вычисляют (блок 15), используя стандартную процедуру фильтра Калмана, со следующими измерениями

В качестве оцениваемого процесса используются уравнения (2). Сравнение матриц измерения (1) и (4) показывает, что определение статических деформаций в последнем случае возможно и без углового движения в отличие от первого.
Определение статической деформации  производят периодически и корректируют курс ГАГ (блок 16) по следующей формуле
производят периодически и корректируют курс ГАГ (блок 16) по следующей формуле

Для подтверждения работоспособности предлагаемого способа измерения углов ориентации с учетом деформации произведем упрощенный расчет точности выработки параметров деформации для плоского движения, т.е. положим θк=K=0.
Для измерения углов ориентации предполагается использовать волоконно-оптические гироскопы ВГ951 и акселерометры АК10. Спектры шумов ВГ951 и АК10 согласно исследованиям, проведенным в ЦНИИ «Электроприбор», представляют [Блажнов Б.А., Несенюк Л.П., Пешехонов В.Г., Старосельцев Л.П. Миниатюрные интегрированные системы ориентации и навигации для гидрографических судов и катеров, Гироскопия и навигация, №4, 2000 г.] белые шумы с интенсивностями

Измерение углов ориентации с учетом деформации от волнения моря производится путем комплексирования измерений ВОГ и углов ориентации, вырабатываемых ГАГ. Особенностью измерения углов ориентации с учетом динамической деформации с помощью комплексированного измерителя является то, что ГАГ принципиально не может измерять динамическую деформацию в месте расположения поста. В этом случае измерение динамической деформации нужно полностью возложить на ВОГ, а именно необходимо выполнить требование (связь параметров фильтра с минимальной частотой, оцениваемой динамической деформацией):
K≤ωдин деф.
где К - коэффициент усиления, Т=1/К - постоянная времени фильтра;
ωдин деф. - минимальная частота динамической деформации.
Передаточная функция замкнутого фильтра (по входу ГАГ), связывающая угол с его оценкой, имеет следующий вид [Челпанов И.Б. Оптимальная обработка сигналов в навигационных системах. Изд. «Наука», Москва 1967 г.; Челпанов И.Б., Несенюк Л.П., Брагинский М.В. Расчет характеристик навигационных приборов. Л.: Судостроение, 1978 г.]

То есть передаточная функция комплексирующего фильтра по углу является низкочастотным фильтром второго порядка с постоянной времени Т. Передаточная функция комплексирующего фильтра (по входу ДУС), связывающая производную угла с оценкой угла, имеет следующий вид:
Передаточная функция комплексирующего фильтра по левому входу представляет собой полосовой фильтр второго порядка с постоянной времени Т.
Оптимальное решение (выбор коэффициента усиления фильтра) реализует компромисс между противоречивыми требованиями уменьшения ошибок, вызванных уходами ВОГ, и более глубокого сглаживания угловых погрешностей ГАГ. Учитывая, что спектральные плотности погрешностей ГАГ в настоящее время недостаточно изучены, необходимо К выбрать из условия более глубокого сглаживания ошибок ГАГ, т.е. сделать полосу пропускания схемы коррекции по входу ГАГ более узкой. Как будет указано ниже, для обеспечения непрерывности измерения деформаций от ωдин деф. до «нулевой частоты» необходимо, чтобы K=1,24*10-3 с-1.
Данный корректор углов ориентации ГАГ (на основе комплексирования ВОГ+ГАГ) можно назвать высокочастотным корректором углов ориентации.
Рассчитаем погрешности измерения углов ориентации, вносимые высокочастотным корректором.
Для оценки точности комплексированного измерителя углов ориентации с учетом деформации необходима информация о спектре помехи углов ориентации ГАГ S(ω). В полосе пропускания схемы коррекции, которая очень узкая (доли герца), эта помеха может быть представлена белым шумом с уровнем S(0)=10-7 рад2/Гц. Тогда дисперсия ошибки угла ориентации рассчитывается по следующей формуле

При измерении деформаций, частота которых ниже ωдеф.≤K, возникают трудности. Эти деформации мало изучены, по ним не имеется статистических характеристик. По сути дела по ним нет математической модели. При определении этих деформаций они трактуются как статические деформации  и периодически уточняются при интенсивном движении корабля. При этом не приводится никаких рекомендаций по определению периодичности этих уточнений.
и периодически уточняются при интенсивном движении корабля. При этом не приводится никаких рекомендаций по определению периодичности этих уточнений.
Высокочастотный корректор, описанный выше, необходимо дополнить низкочастотным корректором, настроенным на частоту Шулера для обеспечения невозмущаемости относительным ускорением хода корабля и ускорением места установки корректора. Инерциальный низкочастотный корректор представляет собой обычную схему выработки угла «обкатки». Но в отличие от классического шулеровского контура инерциальной навигационной системы в нем угол «обкатки» компенсируется. И за счет того что гироскоп (ВОГ) не отрабатывает частоты деформации ωдеф≤K, инерциальный контур превращается в измеритель деформации для частот ωдеф≤К. Выбор К диктуется условием не возмущаемости инерциального контура и при этом обеспечивается непрерывность коррекции по всем частотам деформации, включая статическую деформацию  .
.
Таким образом, инерциальный корректор при получении углов ориентации, выработанных комплексированной вертикалью «ВОГ+ГАГ», вырабатывает углы деформации, соответствующие частотам ωдеф≤K, и за счет обратной связи по g обеспечивает корректировку выходных углов ориентации. Существенным, в данном способе учета низкочастотных деформаций, является отработка ВОГ-ами частот, удовлетворяющих только и только условию ωдин деф≥K, согласно передаточной функции (5). Шулеровский контур коррекции должен быть демпфирован от измерителя скорости.
Необходимо рассмотреть вклад дополнительных погрешностей, обусловленных погрешностями акселерометров и лага, введенного низкочастотного контура коррекции углов ориентации ГАГ.
Оценим дисперсии ошибок низкочастотного корректора по следующей формуле:
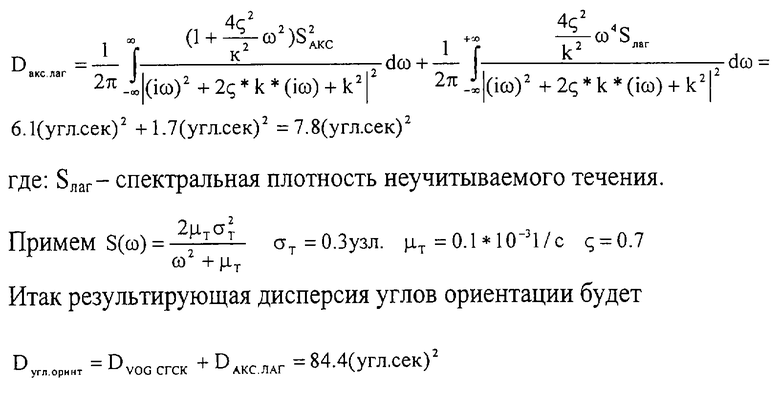
В данном расчете были приняты некоторые упрощения, в частности не рассматривались ошибки установки акселерометров, смещение нуля акселерометров, которые полностью войдут в окончательную ошибку измерителя углов ориентации с учетом деформации корабля.
Реализация предлагаемого способа измерения деформаций и углов ориентации корабля с учетом деформации по сравнению с прототипом имеет следующие преимущества:
- обеспечивает высокую точность измерения углов ориентации с учетом статической и динамической деформации;
- позволяет использовать дешевые волоконно-оптические гироскопы;
- оперативный учет квазистатических деформаций, т.е. для определения статических деформаций относительно продольной и поперечной осей корабля не требуется организация специального движения;
- сокращение используемой аппаратуры (не нужна триада ДУС, располагаемая в месте размещения гироазимутгоризонта).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ УСТРОЙСТВ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ ЕГО КОРПУСА | 2015 |
|
RU2599285C1 |
| СПОСОБ ВЫСТАВКИ МОРСКОЙ БИНС | 2014 |
|
RU2572651C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| КОРАБЕЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС С РЕЖИМОМ КОМПЕНСАЦИИ ВЛИЯНИЯ ДЕФОРМАЦИЙ КОРПУСА КОРАБЛЯ | 2013 |
|
RU2542821C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
Изобретение предназначено для использования на кораблях, имеющих центральный гироазимутгоризонт (ГАГ) для определения деформаций и углов ориентации в любой точке деформируемого корабля. Способ заключается в учете деформаций по разнице показаний двух пространственно разнесенных триад датчиков угловой скорости (ДУС) путем интегрирования уравнений Эйлера и корректировке ГАГ, использовании триады акселерометров в месте потребителя углов ориентации, высокочастотном комплексировании сигналов ДУС с сигналами углов ориентации ГАГ для частот ω≥ωmin дин, низкочастотной коррекции углов ориентации ГАГ с использованием инерциальных, компенсированных по сигналам внешнего измерителя скорости контуров для частот деформации ω<ωmin дин, где ωmin дин - минимальная частота динамической деформации. Для контуров измерения дифферента и крена ωmin дин=1,24·10-3 с-1. Динамические и статические деформации оцениваются фильтром Калмана. Определение только статической деформации относительно вертикальной оси требует искусственной или естественной качки. Техническим результатом является повышение точности измерений углов ориентации и упрощение используемой аппаратуры. 1 з.п. ф-лы, 1 ил.
| БЕРМАН З.М | |||
| и др | |||
| Определение параметров качки корабля с учетом деформации | |||
| - Л.: ЦНИИ "РУМБ", 1989, с.32-34, 40, 48-52, 62-63, 102-112 | |||
| RU 2191351 С1, 20.10.2002 | |||
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE 4423233 А1, 04.01.1996. | |||

