Изобретение относится к области радиолокации, а именно к третичной обработке целевой информации, получаемой от трехкоординатных стабилизированных и двухкоординатных нестабилизированных источников, располагаемых на качающемся носителе (подвижном, качающемся носителе), например, корабле, судне, автомобиле, самолете.
Одной из важнейших задач современных информационно-управляющих систем (ИУС) различного назначения, например, судовых и корабельных, является формирование единой картины целевой обстановки по данным нескольких источников целевой информации, размещенных на подвижном и качающемся носителе. При этом на современных судах и кораблях имеется несколько источников целевой информации: радиолокационных станций (РЛС) и оптико-электронных систем (ОЭС), как стабилизированных (с механической или электронной стабилизацией), так и нестабилизированных, как трехкоординатных, так и двухкоординатных. ИУС, принимая от всех источников целевую информацию должна обеспечить ее отождествление, определив какие формуляры целей от разных источников принадлежат одной и той же реальной цели.
Известен способ идентификации воздушных целей [1] по патенту РФ на изобретение №2567243, согласно которому для отождествления целей в совмещенных РЛС используется дополнительная селекция запросного сигнала по пространственно-временным координатам обнаруженной цели. Для этого на стороне запрашивающего воздушного судна формируют оценки декартовых координат обнаруженной воздушной цели и соответствующие дисперсии в относительной системе координат, кодируют запросный сигнал информацией, содержащей оценки декартовых координат обнаруженной воздушной цели в относительной системе координат и соответствующие дисперсии, на стороне каждого i-го воздушного судна выделяют из принятого запросного сигнала оценки декартовых координат обнаруженной цели в относительной системе координат и соответствующие дисперсии, из навигационной системы каждого i-го воздушного судна вводят оценки его декартовых координат и соответствующие дисперсии, оценивают расстояние между обнаруженной целью и i-м воздушным судном, определяют пороговое значение по расстоянию, принимают решение о совпадении или несовпадении координат и при совпадении передают ответный сигнал.
Сущность изобретения заключается в применении в радиолокационной системе с активным ответом (РСАО) дополнительной селекции запросного сигнала по пространственным координатам обнаруженной воздушной цели, заключающейся в выделении на стороне каждого i-го воздушного судна из множества запросных сигналов, запросного сигнала, адресованного данному воздушному судну, где i ∈ {1,I} - число воздушных судов, находящихся в зоне действия самолетного радиолокационного запросчика, имеющих на борту самолетный радиолокационный ответчик. Данная процедура осуществляется путем сравнения собственных пространственных координат i-го воздушного судна и пространственных координат воздушной цели, обнаруженной бортовой РЛС запрашивающего воздушного судна, информация о которых передается в запросном сигнале, что позволяет уменьшить пространственный объем неопределенности РСАО до размеров, определяемых ошибками измерения пространственных координат обнаруженной воздушной цели, а также ошибками измерения пространственных координат собственного местоположения запрашивающего и i-го воздушных судов.
Данный способ имеет следующие недостатки.
Во-первых, он требует передачи на цель запросного сигнала с данными о местоположении цели и неприменим для обычных локаторов.
Во-вторых, он требует наличия на цели специального ответчика, осуществляющего анализ принятых координат, их сравнение с собственными измеренными координатами и принятие решения о необходимости выдачи ответного сигнала, и неприменим для существующих ответчиков, а также целей, не оснащенных соответствующим специальным оборудованием.
В-третьих, он решает задачу опознавания цели, сопровождаемой РЛС, и не обеспечивает решение задачи отождествления целей, информация о которых поступает от разных РЛС, расположенных на качающемся носителе (подвижном, качающемся носителе).
Известен способ третичной обработки радиолокационной информации (РЛИ) от нескольких разнесенных источников [2] (Кузьмин С.З. «Основы теории цифровой обработки радиолокационной информации» М., «Советское радио», 1974, стр. 407). Этот способ включает в себя следующие операции:
- получение сообщений по целевой обстановке от источников РЛИ;
- приведение сообщений к единому моменту времени;
- приведение сообщений в единую систему координат;
- грубое отождествление пар сообщений.
Для отождествления пар сообщений производится сравнение разностей признаков для отождествления из всех пар формуляров от разных источников с соответствующими порогами:

где  и
и  - ν-ые компоненты векторов
- ν-ые компоненты векторов  и
и  ;
;
X1,i и X2,i - вектора измерений из формуляров с номерами i и j от первого и второго источника соответственно;
 - порог (размер строба, допустимое отклонение) по ν-ому признаку для отождествления;
- порог (размер строба, допустимое отклонение) по ν-ому признаку для отождествления;
L - число анализируемых параметров.
Если для двух формуляров все разности не больше порогов, то принимается решение об их отождествлении. Величины порогов должны обеспечивать вероятности отождествления двух формуляров, принадлежащих одним и тем же реальным целям, близкие к единицам.
Данный способ имеет следующие недостатки.
Он применим для отождествления целевой информации только совмещенных, стабилизированных источников и не применим в случае разнесенных и/или нестабилизированных двухкоординатных источников, РЛС, располагаемых на качающемся носителе (подвижном, качающемся носителе).
Причиной этого является то, что различные двухкоординатные РЛС, например, навигационные РЛС или РЛС обнаружения воздушных и надводных целей, обычно имеют узкую диаграмму направленности в горизонтальной плоскости и широкую в вертикальной (например, косеконсную). При этом в случае обнаружения воздушной цели при наклоне диаграммы направленности из-за качки носителя (фиг. 1) ошибка в определении пеленга на цель составляет
ΔП=arcsin(tgα×tgε), где ΔП - ошибка определения пеленга на цель, вызванная наклоном диаграммы направленности антенны;
Ц - цель;
0XYZ -стабилизированная система координат;
ОХц-Ц - плоскость диаграммы направленности антенны
нестабилизированной двухкоординатной РЛС;
α - угол качки в плоскости антенны;
ε -угол места цели относительно плоскости горизонта.
На фиг. 1 также обозначены:
Zц - высота цели над плоскостью горизонта 0XY;
Xц,Yц,Zц координаты цели в прямоугольной системе координат;
Д - наклонная дальность цели;
Дгор - горизонтальная дальность цели.
Плоскость диаграммы направленности на фиг. 1 заштрихована.
В диапазоне допустимых для судов и кораблей углов качки и используемых в двухкоординатных РЛС диаграмм направленности ошибка определения пеленга воздушной цели ΔП может достигать 40-45 градусов (угловых), что исключает возможность правильного решения задачи отождествления.
Наиболее близким по технической сущности является способ отождествления отметок целей, полученных двумя пространственно-совмещенными РЛС [3] по патенту РФ на изобретение №2668214, заключающийся в том, что в ИУС поступает формуляр цели от каждой из двух РЛС, который содержит вектор измеренных параметров и вектор среднеквадратических отклонений (СКО) этих параметров, в ИУС производят совместную обработку формуляров цели от РЛС1 и РЛС2 путем расчета функционала, содержащего сумму отношений для каждого измеренного параметра, при этом в числителе записывают квадрат разности измерений заданного параметра, принятых от РЛС1 и РЛС2, а в знаменателе - сумму квадратов СКО соответствующих параметров, в результате чего полученное значение функционала сравнивают с пороговым уровнем, выбираемым из таблицы квантилей распределения χ2 с заданным уровнем значимости, по результатам сравнения с пороговым уровнем в ИУС принимают решение о наблюдении единой цели для РЛС1 и РЛС2, которую отображают на пульте оператора как одну отметку цели, либо принимают решение об обнаружении самостоятельных целей РЛС1 и РЛС2, которые отображают на пульте оператора в виде двух целей.
Функционал имеет следующий вид

где xi, yi - значения i-го параметра цели, передаваемого первой и второй РЛС соответственно;
 ,
,  - значения СКО i-го параметра цели, передаваемого первой и второй РЛС соответственно;
- значения СКО i-го параметра цели, передаваемого первой и второй РЛС соответственно;
k - число параметров. Данный способ имеет следующие недостатки.
Во-первых, он применим только для случая стабилизированных РЛС, либо РЛС, размещенных на неподвижном носителе, и не применим в случае нестабилизированной двухкоординатной РЛС, располагаемой на качающемся носителе (подвижном, качающемся носителе).
Во-вторых, он применим только для пространственно-совмещенных РЛС и не применим для пространственно разнесенных РЛС.
Таким образом, ни одно из известных технических решений не позволяет решать задачу отождествления целевой информации по воздушным целям, получаемой от трехкоординатных стабилизированных и двухкоординатных нестабилизированных источников, располагаемых на качающемся (подвижном, качающемся) носителе.
Задачей изобретения является создание способа отождествления целевой информации, сформированной двумя источниками, расположенными на качающемся носителе (подвижном, качающемся носителе), один из источников является трехкоординатным стабилизированным источником (трехкоординатный радиолокатор или оптико-электронная система), а второй двухкоординатным нестабилизированным источником (двухкоординатный радиолокатор).
Технический результат, достигаемый при использовании изобретения, заключается в обеспечении отождествления целевой информации нестабилизированных двухкоординатных и стабилизированных трехкоординатных источников целевой информации, располагаемых на качающемся носителе (подвижном, качающемся носителе), и обеспечении возможности создания многофункциональной информационно-управляющей системы, способной формировать единую воздушную целевую обстановку, получая информацию от стабилизированных и нестабилизированных РЛС и оптико-электронных средств.
Это обеспечивает повышение качества информационного обеспечения об обстановке и управления носителем и его действиями.
Поставленная задача решается, а требуемый технический результат достигается тем, что от каждого из источников поступает формуляр цели, содержащий данные о параметрах цели, а также их среднеквадратических отклонениях, параметры цели и их среднеквадратические отклонения, полученные от трехкоординатного стабилизированного источника пересчитывают (экстраполируют) на момент времени формирования формуляра цели двухкоординатным нестабилизированным источником, определяют значения углов качки носителя на момент формирования формуляра цели от двухкоординатного нестабилизированного источника, пересчитанные параметры цели от трехкоординатного стабилизированного источника и их среднеквадратические отклонения пересчитывают с учетом отстояния центров систем координат источников и углов наклона носителя в систему координат двухкоординатного нестабилизированного источника, вычисляют значение критерия степени совпадения значений анализируемых параметров трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников и принимают решение об отождествлении или неотождествлении целей.
Формуляры целей от источников целевой информации, располагаемых на подвижном, качающемся носителе, например, корабле или судне, передаются в ИУС, где осуществляется процесс их отождествления. Формуляр цели от каждого источника содержит набор измеренных и выработанных параметров цели (координат и параметров движения, например, пеленг, дальность, угол места или координаты в прямоугольной системе координат, составляющие скорости цели, например, радиальная, горизонтальная, вертикальная, полная скорость или составляющие вектора скорости по осям прямоугольной системы координат).
В качестве носителя может использоваться корабль, судно, автомобиль, самолет и т.д.
В ИУС данные о координатах цели, сформированные трехкоординатным стабилизированным источником информации, пересчитывают (экстраполируют) на момент времени формирования (получения) формуляра цели от двухкоординатного нестабилизированного источника информации, определяют с использованием навигационной системы значения углов качки носителя на момент формирования (получения) координат двухкоординатным нестабилизированным источником целевой информации, пересчитанные (экстраполированные) параметры цели (координаты и параметры движения цели) от трехкоординатного стабилизированного источника, пересчитывают в систему координат двухкоординатного нестабилизированного источника (с учетом углов качки и отстояния центров систем координат источников). Данные о СКО координат и параметров движения цели, сформированные трехкоординатным стабилизированным источником информации, пересчитывают на момент времени формирования (получения) формуляра цели от двухкоординатного нестабилизированного источника целевой информации, затем с учетом значения углов качки носителя на момент формирования (получения) координат двухкоординатным нестабилизированным источником целевой информации, а также отстояния центров координат источников, пересчитанные значения СКО параметров цели (координат и параметров движения цели) от трехкоординатного стабилизированного источника, пересчитывают в систему координат двухкоординатного нестабилизированного источника.
Полученные значения параметров цели (координат и параметров движения цели) от трехкоординатного стабилизированного источника, а также значения их СКО, пересчитанные в систему координат двухкоординатного нестабилизированного источника используют для принятия решения об отождествлении целей.
Для принятия решения об отождествлении или неотождествлении целей вычисляют:
- разность значений всех одноименных параметров от двухкоординатного нестабилизированного источника информации и пересчитанных в его систему координат параметров цели от трехкоординатного стабилизированного источника информации,
- значение критерия степени совпадения значений анализируемых параметров. После этого по полученному значению критерия принимают решение об
отождествлении или неотождествлении целей, например, сравнивают значение вычисленного критерия с пороговым значением и принимают решение об отождествлении или неотождествлении целей, т.е. о наблюдении обоими источниками одной или разных целей.
Отождествление может производиться с учетом только координат целей, без учета параметров их движения.
Изобретение может быть использовано на подвижных качающихся носителях (кораблях, судах, автомобилях, гусеничных транспортных средствах и т.д.), оснащенных двумя источниками целевой информации: трехкоординатным стабилизированным и двухкоординатным нестабилизированным, осуществляющими обнаружение и сопровождение целей.
Под координатами целей понимаются данные об их местоположении в некоторой системе координат, например, пеленг, дальность и угол места в полярной системе координат, либо X,Y,Z в прямоугольной системе координат.
Под составляющими скорости целей понимаются проекции вектора скорости на оси системы координат.
В рамках настоящей заявки используемые термины и определения означают следующее.
Навигационные системы - системы, обеспечивающие определение направлений осей системы координат носителя, значений текущих координат носителя и его углов наклона (качки).
Неотождествление - принятие решения о соответствии информационных пакетов с данными о целях (объектах) от измерительных средств разным целям (объектам).
Неотождествленные цели (объекты) - цели (объекты), обнаруженные измерительными средствами, по которым принято решение, что они не являются одной и той же целью (объектом).
Отождествление - принятие решения о соответствии информационных пакетов с данными о целях (объектах) от измерительных средств одной и той же цели (объекту).
Отождествленные цели (объекты) - цели (объекты), обнаруженные измерительными средствами, по которым принято решение, что они являются одной и той же целью (объектом).
Отстояние центров систем координат - расстояние между центрами систем координат в трехкоординатной прямоугольной системе координат, привязанной к носителю.
Цели (объекты) - любые цели (объекты), обнаруженные измерительными средствами носителя.
Сущность изобретения иллюстрируется вариантами реализации способа и поясняется чертежами, на которых изображены:
- на фиг. 1 - иллюстрация появления ошибки измерения пеленга ДП при наклоне диаграммы направленности нестабилизированной антенны двухкоординатной РЛС;
- на фиг. 2 - структурная схема системы, обеспечивающей реализацию предлагаемого способа (вариант 1).
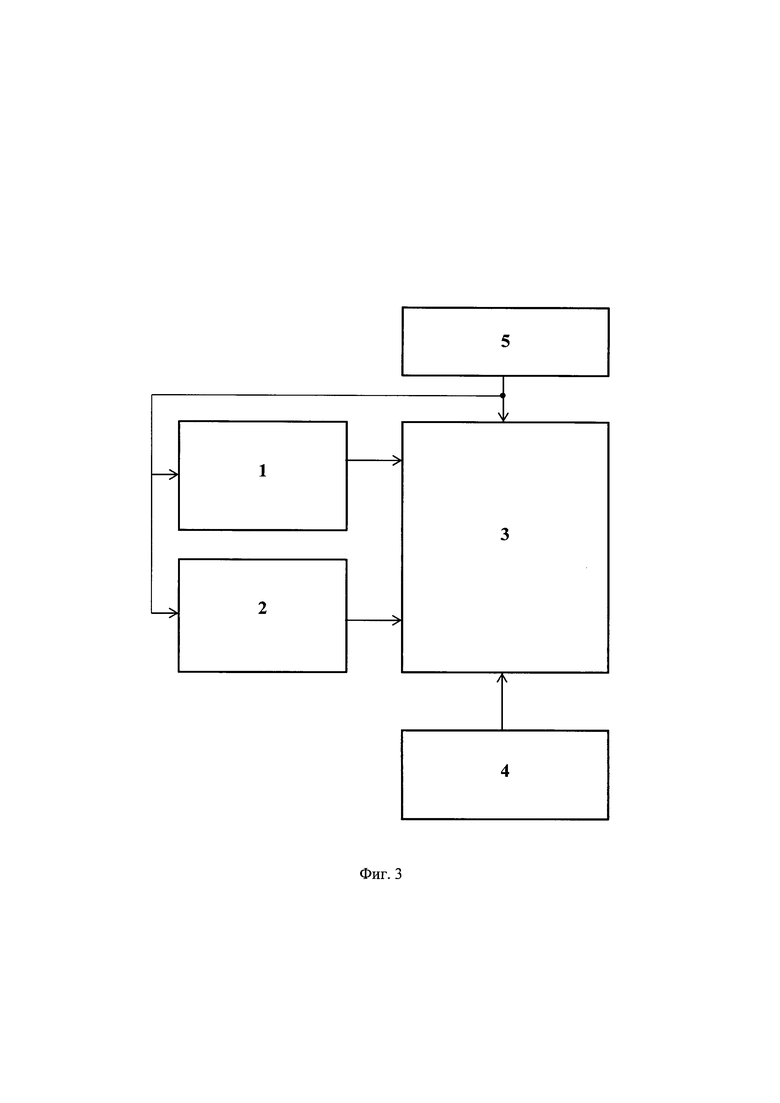
- на фиг. 3 - структурная схема системы, обеспечивающей реализацию предлагаемого способа (вариант 2);
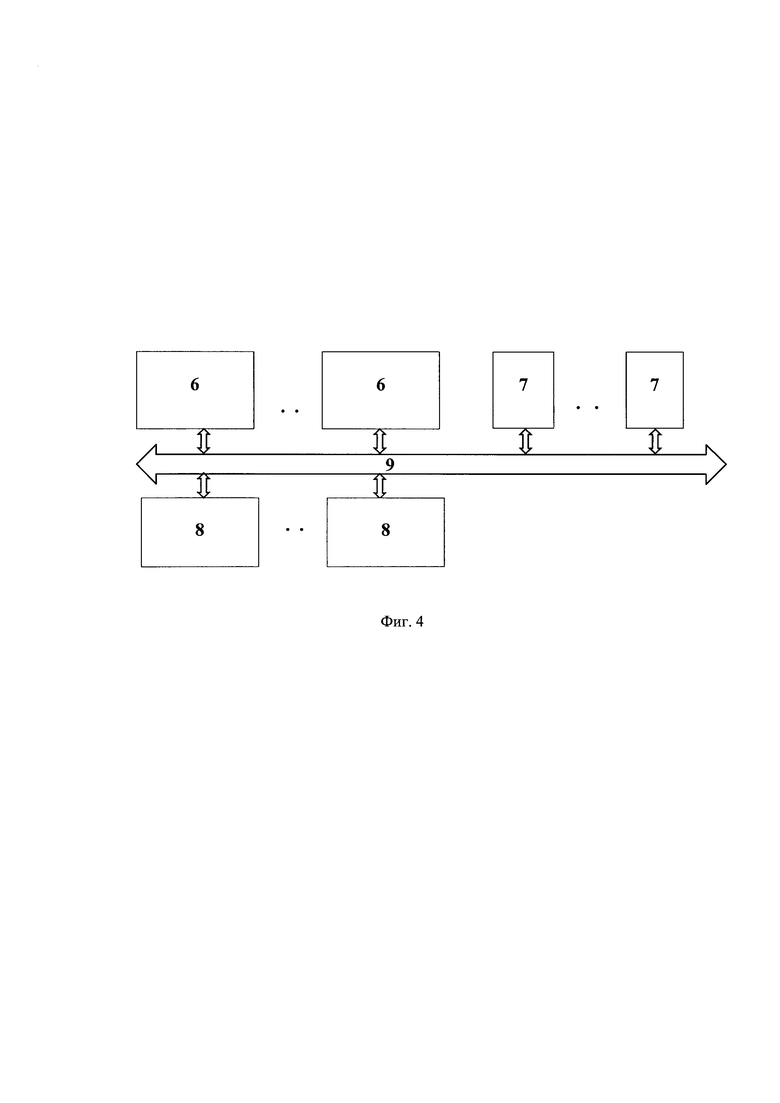
- на фиг. 4 - структурная схема ИУС носителя.
Способ может быть реализован с помощью системы, представленной на фиг. 2 или системы, представленной на фиг. 3.
Система, реализующая предложенный способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе (подвижном, качающемся носителе) (фиг. 2), включает трехкоординатный стабилизированный источник целевой информации 1, двухкоординатный нестабилизированный источник целевой информации 2, ИУС 3, навигационную систему 4.
Трехкоординатный стабилизированный источник целевой информации 1, двухкоординатный нестабилизированный источник целевой информации 2 и навигационная система 4 соединены с ИУС 3 (устройствами сопряжения 6 ИУС на фиг. 4).
Возможен другой вариант реализации системы (фиг. 3).
Система, реализующая предложенный способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе (фиг. 3), включает: трехкоординатный стабилизированный источник целевой информации 1, двухкоординатный нестабилизированный источник целевой информации 2, ИУС 3 навигационную систему 4, систему единого времени 5.
Трехкоординатный стабилизированный источник целевой информации 1, двухкоординатный нестабилизированный источник целевой информации 2, система единого времени 5 и навигационная система 4 соединены с ИУС 3 (устройствами сопряжения 6 ИУС на фиг. 4). Система единого времени 5 соединена с источниками целевой информации 1 и 2 и ИУС 3.
ИУС носителя (фиг. 4) включает устройства сопряжения 6, автоматизированные рабочие места операторов (АРМ) 7, вычислители 8, сеть обмена данными 9.
При этом она выполнена с возможностью:
- приема информации о координатах и параметрах движения, а также значениях их СКО от источников целевой информации;
- приема информации об углах наклона (качки) носителя и вычисления текущего значения углов наклона;
- пересчета координат, параметров движения и СКО определения координат и параметров движения целей из системы координат трехкоординатного стабилизированного источника в систему координат двухкоординатного нестабилизированного источника;
- вычисления значения критерия степени совпадения значений анализируемых параметров цели;
- принятия решения об отождествлении или неотождествлении целей на носителе на основе вычисленного значения критерия, например, путем сравнения значения рассчитанного критерия с пороговым значением и принятия решения об отождествлении или неотождествлении целей.
Это обеспечивает реализацию предложенного способа.
Изобретение иллюстрируется вариантами реализации предложенного способа при использовании в качестве носителя корабля или судна.
В качестве навигационной системы 4 в данном случае может использоваться система инерциальной навигации любого типа, в частности, для корабельных носителей может использоваться инерциальная навигационная система «Ладога-М» и ее модификации, например, [4].
Трехкоординатный стабилизированный источник целевой информации 1 может представлять собой радиолокационную или ОЭС любого типа, обеспечивающую обнаружение и сопровождение целей, в частности для корабельного носителя в качестве радиолокационной системы могут использоваться существующие корабельные радиолокационные станции и комплексы, либо ОЭС обнаружения и сопровождения:
- корабельная трехкоординатная радиолокационная станция «Фрегат-МА-Э» и ее модификации [5,6];
- корабельный многофункциональный радиоэлектронный комплекс «Позитив-МЭ» и его модификации [7];
- ОЭС МТК-201 [8].
Двухкоординатный нестабилизированный источник целевой информации 2 может представлять собой:
- корабельную навигационную радиолокационную станцию [5,9], например, навигационную РЛС (НРЛС) МР-212/201-1, МР-231, МР-231-3 и другие;
- двухкоординатные РЛС обнаружения воздушных и надводных целей [10,11];
- запросчики опознавания государственной принадлежности [10,12,13]. Примером ИУС может являться:
- боевая ИУС «Требование-М» [14,15];
- боевая ИУС «Сигма-Э» [14,16];
- система управления радиолокационного комплекса [13].
В качестве системы единого времени 5 может использоваться система «Гном-2» [17] или система группы компаний «Экра» [18].
В составе ИУС 3 устройства сопряжения 6 и вычислители 7 могут выполняться в виде стандартного компьютера любого типа, например:
- промышленные компьютеры фирмы Advantech [19].
- промышленные компьютеры фирмы Fastwel [20].
АРМ (пульт) может представлять собой комплекс, включающий один или несколько вычислителей, средства отображения в виде мониторов и органы управления (клавиатура, трекбол, сенсорный экран). Примером может являться АРМ, выпускаемое отечественными предприятиями, например, АРМ боевой ИУС «Требование-М» [14,15] или «Сигма-Э» [14,16].
Примером реализации системы может являться оборудование корабля [21], включающее:
- набор источников целевой информации в виде радиолокационных станций типа «Фрегат» и «Позитив», а также навигационных радиолокационных станций типа МР-212/201-1, Маша 2300 A/3/SU, МР-231, МР-231-3;
- боевую ИУС «Требование-М», включающую устройства (приборы) сопряжения, вычислители, АРМ, сеть обмена данными;
- навигационную систему типа «Ладога-М»;
- комплекс запросчиков средств опознавания, размещенных на РЛС и НРЛС.Функционирование системы (фиг.2) для реализации способа осуществляется следующим образом.
Навигационная система 4 носителя осуществляет формирование значений углов бортовой (угол θ - крен) и килевой (угол ϕ - дифферент) качки, угловых скоростей по θ и ϕ, координат, курса и скорости носителя и обеспечивает их выдачу в ИУС 3.
Трехкоординатный источник целевой информации 1 имеет механическую или электронную стабилизацию, в зависимости от исполнения антенной системы.
Трехкоординатный стабилизированный источник целевой информации 1 и двухкоординатный нестабилизированный источник целевой информации 2 осуществляют обзор пространства, обнаружение и сопровождение целей. При этом они вырабатывают координаты и параметры движения сопровождаемых целей, а также значения их СКО, формируют формуляры целей и выдают их в ИУС 3. Данные о координатах и параметрах движения и их СКО в формулярах формируются на момент их выдачи. Для этого при необходимости измеренные координаты целей и значения их СКО пересчитываются (экстраполируются) на момент их выдачи по данным на момент их локации.
Информация о значениях углов бортовой (угол θ) и килевой (угол ϕ) качки, угловых скоростей по θ и ϕ, курса и скорости носителя поступает от навигационной системы 4 носителя в устройство сопряжения 6 ИУС 3, где принимаются, обрабатываются и передаются в вычислитель 8, решающий задачу отождествления.
Формуляры целей, содержащие координаты и параметры движения целей, а также их СКО в ИУС 3 поступают (фиг. 4) в устройства сопряжения 6, где принимаются, обрабатываются и передаются в один из вычислителей 8, осуществляющий их отождествление. При поступлении каждого целевого формуляра от источника целевой информации устройство сопряжения 6 формирует из него стандартный формуляр внутреннего формата, включающий координаты и параметры движения цели в полярных и прямоугольных координатах, значения их СКО и дополняет его системным временем поступления формуляра.
Пересчет координат цели из полярных координат в прямоугольные (для системы координат, представленной на фиг. 1) производится в соответствии со следующими соотношениями:
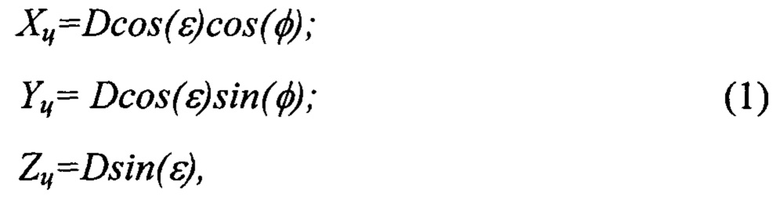
где ε - угол места цели, φ - пеленг цели.
Пересчет координат и параметров движения цели из прямоугольных координат в полярные производится в соответствии со следующими соотношениями:
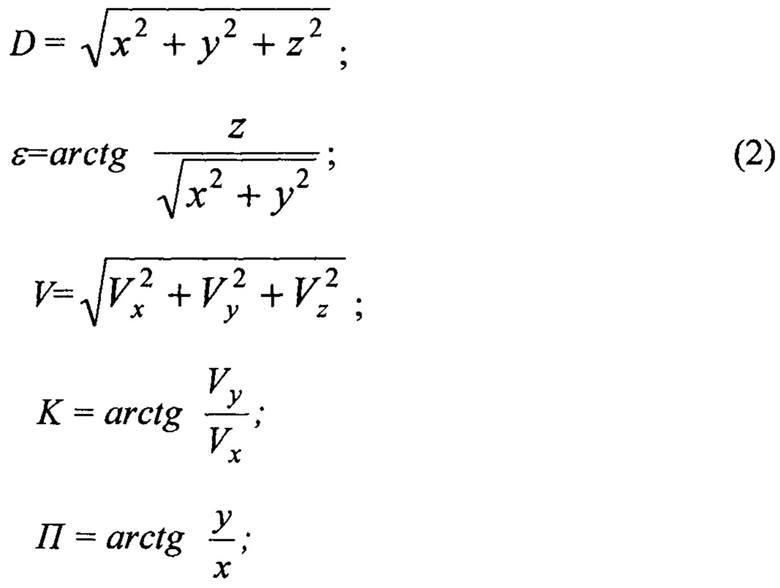
где D - дальность, ε - угол места, V - скорость, K - курс, П - пеленг, x=Xц, y=Yц, z=Zц,
Пересчет ошибок координат и параметров движения цели из одной системы
координат в другую производится в общем случае на основе следующих соотношений.
Для функции ƒ=ƒ (x1, …, хn) при известных значениях ошибок Δ(xi) погрешность функции Δ(ƒ) определяется [22-25] соотношением

Поскольку

то
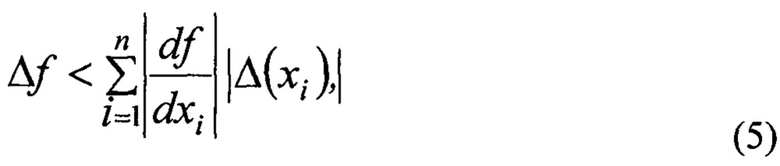
где Δxi - предельные абсолютные погрешности аргументов xi;
Δƒ - предельная абсолютная погрешность функции ƒ.
Средняя абсолютная погрешность определяется [24] соотношением

где ƒxi - абсолютные погрешности аргументов xi;
Δƒcp - средняя абсолютная погрешность функции ƒ.
Средняя квадратическая погрешность определяется [22] соотношением

где σƒ - среднеквадратическая погрешность функции ƒ;
σxi - среднеквадратическое погрешность аргумента xi.
Примечание: для формуляров целей, поступающих от двухкоординатного нестабилизированного источника данные в прямоугольной системе координат не формируются.
Вычислитель 8 (фиг. 4) принимает стандартные формуляры целей, сохраняет их и производит отождествление в следующем порядке.
При получении формуляра цели от двухкоординатного нестабилизированного источника целевой информации 2 в вычислителе выполняют следующие операции:
1) Выбирают последний (до поступления формуляра цели двухкоординатного нестабилизированного источника) поступивший формуляр цели от трехкоординатного стабилизированного источника.
2) Пересчитывают (экстраполируют) координаты цели х, у, z, поступившие от трехкоординатного стабилизированного источника, а также их СКО на момент времени получения формуляра двухкоординатного нестабилизированного источника:


где Δt - интервал времени между моментами времени получения формуляров цели от двухкоординатного нестабилизированного и трехкоординатного стабилизированного источников,
x,y,z - координаты цели;
х',у',z' - экстраполированные на время Δt координаты цели;
σ(х), σ (у), σ (z) - СКО координат цели;
σ(x'), σ(y'), σ(z') - экстраполированные на время Δt СКО координат цели;
σ(Vх), σ(Vy), σ(Vz) - СКО составляющих вектора скорости цели.
3) Принятые значения углов бортовой (угол θ - крен) и килевой (угол ϕ - дифферент) качки при необходимости пересчитывают (экстраполируют) на момент времени решения задачи отождествления (времени получения формуляра цели от двухкоординатного нестабилизированного источника) с учетом значений угловых скоростей по θ и ϕ:
θэ=θ+ωθΔt; θэ=ϕ+ωϕΔt,
где θ, ϕ - значения углов бортовой и килевой качки, принятые от навигационной системы;
θЭ, ϕЭ - значения углов бортовой и килевой качки, экстраполированные на момент времени формирования формуляра цели от двухкоординатного нестабилизированного источника;
ωθ, ωϕ - угловые скорости бортовой и килевой качки;
Δt - интервал времени между моментами приема значения углов бортовой (угол θ) и килевой (угол ϕ) качки от навигационной системы и моментом времени получения формуляра цели от двухкоординатного нестабилизированного источника.
Необходимость пересчета определяется значением интервала времени Δt и значениями скоростей ωθ, ωϕ. При малых значениях указанных параметров пересчет может не производиться.
4) Далее пересчитывают экстраполированные координаты цели трехкоординатного стабилизированного источника в систему координат двухкоординатного нестабилизированного источника с учетом углов наклона нестабилизированной системы координат и отстояния ее центра в следующем порядке.
4.1) Определяют координаты центра K={хk,yk,zk} системы координат двухкоординатного нестабилизированного источника информации в трехкоординатной стабилизированной системе координат при качке носителя.
Пересчет производится с использованием одной из систем углов Эйлера [26] в зависимости от информации, выдаваемой навигационной системой.
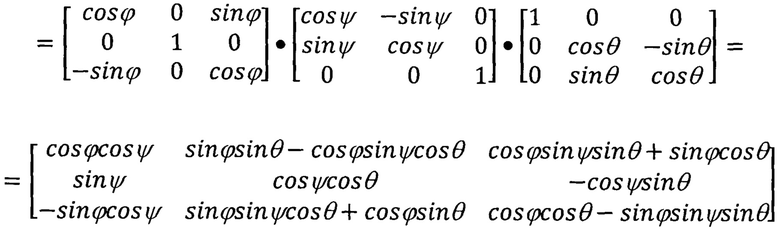
Если навигационная система координат выдает углы поворота относительно осей исходной стабилизированной системы координат, то для стабилизированной системы координат, представленной на фиг.1, используется следующая последовательность поворотов:
а) Поворот на угол ψ вокруг оси 0Z (матрица Rxν) - рыскание.
б) Поворот на угол ϕ вокруг оси 0Y (матрица Ryϕ))-дифферент (тангаж).
в) Поворот на угол θ вокруг оси 0Х (матрица Rxθ) - крен.
Результирующая матрица поворота в этом случае имеет вид

Если используется система координат, у которой ось X, расположенная в вертикальной плоскости и ориентирована параллельно строительной оси судна при отсутствии качек, то ψ=0. При этом используется не пеленг цели П, а ее курсовой угол КУ, причем
КУ=П-К,
где КУ - курсовой угол, П - пеленг цели, К - курс судна (корабля); курсовые углы правого борта - положительные, левого борта - отрицательные.
Если навигационная система выдает углы поворота относительно системы координат с повернутыми осями относительно исходной стабилизированной системы координат, то для системы координат, представленной на фиг. 1, используется следующая последовательность поворотов:
а) Поворот на угол ϕ вокруг оси 0Y (матрица Ryϕ) -дифферент (тангаж).
б) Поворот на угол ψ вокруг 0W (повернутой оси 0Z) (матрица Rνθ) - рыскание.
в) Поворот на угол θ вокруг оси 0V (повернутой оси 0Х) (матрица Rwψ) - крен.
Результирующая матрица поворота имеет вид

Если используется система координат, у которой ось X, расположенная в вертикальной плоскости, ориентирована параллельно строительной оси судна при отсутствии качек, то ψ=0. При этом используется не пеленг цели П, а ее курсовой угол КУ.
В результате пересчета получаем координаты центра нестабилизированной системы координат  ,
,  ,
,  в системе координат трехкоординатного стабилизированного источника при наклоне первой из систем на угол крена θ и дифферента ϕ.
в системе координат трехкоординатного стабилизированного источника при наклоне первой из систем на угол крена θ и дифферента ϕ.
Если источники информации совмещены, то пересчет координат центра системы координат двухкоординатного нестабилизированного источника в систему координат трехкоординатного стабилизированного источника при качке носителя не производится.
4.2) Пересчитывают координаты цели, а также значения СКО, трехкоординатного стабилизированного источника в стабилизированную прямоугольную систему координат (направления осей совпадают с направлением осей исходной системы координат) с центром в точке расположения центра K={хk,yk,zk} системы координат двухкоординатного нестабилизированного источника информации (точке расположения его антенной системы):

Для совмещенных источников данный пересчет не производится.
4.3) Пересчитывают координаты цели и параметры движения цели, а также значения их СКО из трехкоординатной стабилизированной системы координат с центром в точке K в прямоугольную нестабилизированную систему координат с центром в точке K, повернутую на угол ϕ дифферента (килевой качки) и угол θ крена (бортовой качки).
Пересчет производится [26] в соответствии с системой углов Эйлера (10) или (11) в зависимости от выдаваемых навигационной системой судна параметров. В результате получаем координаты х3,y3,z3 цели в прямоугольной нестабилизированной системе координат.
Возможен иной порядок перечета координат цели трехкоординатного стабилизированного источника в систему координат двухкоординатного нестабилизированного источника, при котором сначала пересчитывают координаты цели трехкоординатного стабилизированного источника в совмещенную (с общим центром систем координат) наклонную систему координат, а затем учитывают отстояние центра системы координат нестабилизированного источника от центра системы координат стабилизированного источника.
5) Пересчитывают координаты цели, а также значения СКО из прямоугольной нестабилизированной системы координат в полярную нестабилизированную систему координат с центром в точке K.
где П - пеленг, ε - угол места.
6) Далее производят отождествление целей двухкоординатного нестабилизированного и трехкоординатного стабилизированного источников, для чего используют координаты цели двухкоординатного нестабилизированного источника и значения их СКО, а также пересчитанные координаты цели трехкоординатного стабилизированного источника и значения их СКО. Для этого ИУС рассчитывает значение критерия, используемого для отождествления, и по его значению принимает решение об отождествлении, например, путем его сравнения с пороговым значением.
В качестве критерия может использоваться предложенный в патенте РФ на изобретение №2668214 [3], функционал вида

где рi, qi - значения i-го параметра трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников;
σpi, σqi - значения СКО параметров pi, qi;
k - число анализируемых параметров.
Может использоваться описанный выше критерий, предложенный в [2].
Могут также использоваться критерии, предложенные в [27-31].
В рассматриваемом случае для отождествления используются пеленг и дальность до цели. Могут использоваться дополнительно курс и скорость цели.
Функционирование системы, представленной на фиг. 3, также осуществляется в описанном выше порядке. Разница заключается в том, что благодаря наличию системы единого времени 5 формуляры целей, выдаваемые источниками целевой информации 1 и 2, дополняются временем измерения источником координат цели, при этом на этапе 2 пересчет (экстраполяция) координат цели, а также их СКО осуществляется на момент времени измерения координат цели двухкоординатным нестабилизированным источником, а значение Δt - определяется как интервал времени между моментами измерения координат цели двухкоординатным нестабилизированным и трехкоординатным стабилизированным источниками, содержащимися в выдаваемых ими формулярах целей. Аналогичным образом при расчете углов крена носителя значение Δt определяется как интервал времени между моментами приема значения углов бортовой (угол θ) и килевой (угол ϕ) качки от навигационной системы и моментом времени измерения координат цели двухкоординатным нестабилизированным источником.
Учет в процессе отождествления углов наклона антенной системы нестабилизированного источника, путем пересчета координат и параметров движения целей, формируемых трехкоординатным стабилизированным источником в качающуюся систему координат двухкоординатного нестабилизированного источника, позволяет исключить ошибку в значениях координат и параметров движения цели, формируемых двухкоординатным источником, обусловленную качкой носителя, и обеспечивает отождествление целей.
Техническим результатом предлагаемого изобретения является возможность отождествления целей по информации, получаемой от стабилизованных и нестабилизированных источников, располагаемых на качающемся носителе (подвижном, качающемся носителе) и возможность создания многофункциональной информационно-управляющей системы, способной формировать единую целевую обстановку, получая информацию от двухкоординатных и трехкоординатных стабилизированных и нестабилизированных РЛС и оптико-электронных средств.
Таким образом, все существенные признаки способа и системы обеспечивают достижения технического результата и находятся в причинно-следственной связи с ним, а именно:
- параметры цели (координаты и параметры движения и их СКО), полученные от трехкоординатного стабилизированного источника пересчитывают на момент времени формирования формуляра цели двухкоординатным нестабилизированным источником;
- измеряют с использованием навигационной системы значения углов качки носителя;
- пересчитанные, с учетом разности времени формирования данных о целях, координаты и параметры движения цели и их СКО от трехкоординатного стабилизированного источника, пересчитывают в систему координат двухкоординатного нестабилизированного источника с учетом отстояния центров систем координат источников информации и углов наклона носителя;
- пересчитанные координаты и параметры движения цели трехкоординатного стабилизированного источника и их СКО используют для принятия решения об отождествлении целей.
Источники информации
1. Патент РФ на изобретение №2567243, МКИ G01S 13/00, опубликован 10.11.2015 Бюл. №31. Способ идентификации воздушных целей / Ткаченко С.С.
2. Кузьмин С.З. «Основы теории цифровой обработки радиолокационной информации» М., «Советское радио», 1974, 432 с.
3. Патент РФ на изобретение №2668214, МКИ G01S 13/42, опубликован 27.09.2018 Бюл. №27. Способ отождествления отметок целей, полученных двумя пространственно-совмещенными РЛС / Кваснов А.В.
4. Пешехонов В.Г., Шарыгин Б.Л., Миронов Ю.В. Единая система инерциальной навигации и стабилизации «Ладога-М» // Морская радиоэлектроника - 2003. - №1 (4). - С. 26-30.
Информационный ресурс:
http://www.elektropribor.spb.ru/katalog/sistemy-inertsialnoy-navigatsii-i-stabilizatsii/ ladoga-me/
5. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 34-36, 39-41, 216-218.
6. Информационные ресурсы:
http://bastion-karpenko.ru/fregat-mae-rls/
http:///new.smp-salyut.ru/produktsiya-voennogo-naznacheniya/rls-fregat-mae-4k/
7. Информационные ресурсы
https://roe.ru/catalog/voenno-morskoy-flot/korabelnye-radioelektronnye-sistemy/pozitiv-mе/
http://bastion-karpenko.ru/mr-352-pozitiv-rls/ https://typhoon-jsc.ru/
8. Информационные ресурсы
https://roe.ru/catalog/voenno-morskoy-flot/korabelnye-radioelektronnye-sistemy/mtk-201mе/
http://bastion-karpenko.ru/mtk-201mе/
9. Информационные ресурсы: https://cirspb.ru/equipment-and-service/rls/mp-23/
https://4250107.ru/files/0001465-навигационная% 20радиолокационная%
20 станция%20МР-231.pdf
http://промкаталог.рф/РublicDocuments//0624936.pdf
https://lk.rs-class.org/industry/getIndustry?d-DCB 12А17-AE2D-B039-7407-699B7EA0754F
http://south.prom-rus.com/cat-elektrotehnicheskaya-prodykciya/apparatyra-svyazi-i-signalizacii/22894/
10. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А. Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 51-53.
11. Информационный ресурс
http://south.prom-rus.com/cat-elektrotehnicheskaya-prodykciya/apparatyra-svyazi-i-signalizacii/22894/
12. Нуруллин P.H. Основы построения аппаратуры навигации, топопривязки, ориентирования и радиолокационного опознавания. Учебное пособие. Утверждено на заседании Редакционно-издательского совета «Московский авиационный институт (национальный исследовательский университет)» 26.08.2019.- Издательство «Перо», Москва, 2019.
13. Музыченко О.Н., Агуреев В.И. АСУ РЛК надводных кораблей нового поколения // Сборник докладов научно-технической конференции ФГУП «НПО «Агат» «Состояние, проблемы и перспективы разработки корабельных информационно-управляющих комплексов (эффективность, надежность, экономика), 2007. - С. 97-100.
14. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 88-92
15. Копанев А.А., Музыченко О.Н. Новый этап в развитии БИУС «Требование-М» // Морская радиоэлектроника, 2011, №2 (36).- С. 17-23.
Копанев А.А., Музыченко О.Н. «Требование-М» - боевая информационно-управляющая система для Российского флота // Морские информационно-управляющие системы, 2012, №1, С.8-15.
Копанев А.А., Музыченко О.Н. Современным кораблям флота России - новое поколение БИУС «Требование-М» // Морской вестник, 2012, №4 (44), С. 57-61.
16. Маклаев В.А, Союз традиций и современных технологий // Национальная оборона, 2011, №6. - С. 60-62.
17. Информационный ресурс
http://www.niichasprom.ru/catalog/produktsiya-spetsialnogo-naznacheniya/sistemy-edinogo-vremeni-i-etalonnykh-chastot-sev-i-ech/
18. Информационный ресурс
https://ekra.ru/product/ae/avtomatizatsiya-obektov-i-asu-ptk-evicon/sa-i-asu/s-o-e-v/
19. Информационные ресурсы
https://www.advantech.ru/products/embedded-automation-computers/sub_1-2mlckb https://advantech.pro/catalog/
20. Информационные ресурсы
https://www.electronics.rU/files/article_pdf/6/article_6243_692.pdf
https://www.fastwel.ru/
https://masteropc.insat.ru/products/fastwel/Fastwel-IO_2015.pdf
21. Информационные ресурсы
https://topwar.ru/3632-russkie-fregaty-proekt-l1356.html;
http//www.army-news.ru/2011/03/fregat-11356/httl,
http//www.topwar.ru/3632.russkie-fregaty-proekt-11356.html
https://wiki.wargaming.net/ru/Navy:Фpeгaты_проекта_l1356.
22. Белкин A.M., Миронов Н.Ф., Рублев Ю.И., Сарайский Ю.Н. Воздушная навигацияхправочник. М.: Транспорт, 1988. - 303 с. (с. 279).
23. Бурмистров В.В. Краткая теория погрешностей. - Коломна, «Риза», 2008. -52 с. (с.28-34).
24. Ларионов А.Н., Чернышев В.В., Ларионова Н.Н. Погрешности измерения физических величин. - Воронеж, Издательско-полиграфического центр Воронежского государственного университета. 2009.- 48 с. (с. 18-21).
25. Бобученко Д.С., Бумай Ю.А., Черный В.В. Изучение погрешностей измерений. -Минск, БИТУ, 2018.- 24 с. (с. 14-18)
26. Климчик А.С. Гомолицкий Р.И., Фурман Ф.В., Семкин К.И. Разработка управляющих программ промышленных роботов. - Минск, БГУИР, 2008.- 131 с. (с. 16-20, 21,22-28).
27. Савченко Д.И. Задача отождествления данных в системах освещения обстановки // Итоги диссертационных исследований. Том. 3. -Материалы III Всероссийского конкурса молодых ученых. - М.: РАН, 2011.- С 149-159.
28. Бондаренко А.Л. Повышение достоверности отождествления измерений увеличением количества используемых признаков идентификации // Радиоэлектроника -1996. -№5. -С. 77-80.
29. Усачев В.В., Федоров И.Б. Отождествление потока объектов в системе измерителей// Изв. ВУЗов ССР Радиоэлектроника. -1980. - Т.23, №11. - С. 32-37.
30. Машков Г.М. Статистические критерии и показатели качества отождествления локационных объектов. // Радиоэлектроника - 2001. - №9. - С. 40-48
31. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех - М: Радио и связь, 1981. - 416 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ОТМЕТОК ЦЕЛЕЙ, ПОЛУЧЕННЫХ ДВУМЯ ПРОСТРАНСТВЕННО-СОВМЕЩЕННЫМИ РЛС | 2017 |
|
RU2668214C2 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2020 |
|
RU2759515C1 |
| Способ информационного обеспечения судоводителя о надводной обстановке | 2023 |
|
RU2833310C1 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2022 |
|
RU2788578C1 |
| УНИВЕРСАЛЬНОЕ САМОСТАБИЛИЗИРУЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ СУДОВОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2001 |
|
RU2206943C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ В МНОГОПОЗИЦИОННОЙ СИСТЕМЕ ДВУХКООРДИНАТНЫХ РЛС | 2014 |
|
RU2581706C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ ОДНОКООРДИНАТНОЙ ПЕЛЕНГАЦИИ В СВЯЗАННОЙ СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834277C1 |
| СПОСОБ ЭЛЕКТРОННОЙ СТАБИЛИЗАЦИИ ЗОНЫ ОБЗОРА РЛС | 2007 |
|
RU2343532C1 |
| САМОСТАБИЛИЗИРУЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ АНТЕННЫХ ПОСТОВ И ПРИБОРОВ СУДОВОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2001 |
|
RU2204873C1 |


Изобретение относится к области радиолокации, а именно к третичной обработке целевой информации, получаемой от трехкоординатных стабилизированных и двухкоординатных нестабилизированных источников, располагаемых на подвижном качающемся носителе, например корабле, судне, автомобиле, самолете. Технический результат – создание способа отождествления целевой информации, обеспечивающего формирование информационно-управляющей системой единой воздушной целевой обстановки по данным стабилизированных и нестабилизированных источников, располагаемых на качающемся носителе. Заявленный способ заключается в том, что от каждого из источников поступает формуляр цели, содержащий данные о параметрах цели, а также их среднеквадратических отклонениях. Параметры цели и их среднеквадратические отклонения, полученные от трехкоординатного стабилизированного источника, пересчитывают на момент времени формирования формуляра цели двухкоординатным нестабилизированным источником. Определяют значения углов качки носителя на момент получения формуляра цели от двухкоординатного нестабилизированного источника. Пересчитанные параметры цели от трехкоординатного стабилизированного источника и их среднеквадратические отклонения пересчитывают в систему координат двухкоординатного нестабилизированного источника. Далее вычисляют значение критерия степени совпадения значений анализируемых параметров трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников и принимают решение об отождествлении или неотождествлении целей. 2 з.п. ф-лы, 4 ил.
1. Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников целевой информации, располагаемых на качающемся носителе, заключающийся в том, что от каждого из источников получают формуляр цели, содержащий данные о параметрах цели, а также их среднеквадратических отклонениях, вычисляют значение критерия степени совпадения значений анализируемых параметров, отличающийся тем, что в каждом источнике целевой информации осуществляют обзор пространства, обнаружение и сопровождение целей, вырабатывают на момент локации целей их параметры, включающие координаты и параметры движения сопровождаемых целей и среднеквадратические отклонения параметров целей, в каждом из источников целевой информации формируют формуляры целей и передают их в информационно- управляющую систему, с использованием навигационной системы определяют значения углов качки носителя на момент получения информационно-управляющей системой формуляра цели от двухкоординатного нестабилизированного источника, принятые от трехкоординатного источника координаты и параметры движения цели к их среднеквадратические отклонения пересчитывают на момент времени формирования формуляра цели двухкоординатным нестабилизированным источником, затем пересчитанные параметры цели от трехкоординатного стабилизированного источника пересчитывают в систему координат двухкоординатного нестабилизированного источника с учетом углов качки носителя и отстояния центра системы координат нестабилизированного источника от центра системы координат стабилизированного источника, вычисляют значение критерия совпадения значений анализируемых параметров трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, по значению критерия принимают решение об отождествлении или неотождествлении целей, а именно о наблюдении обоими источниками одной или разных целей.
2. Способ по п. 1, отличающийся тем, что формуляр цели содержит набор определенных на момент локации параметров целей и их среднеквадратических отклонений и единое системное время формирования формуляра цели.
3. Способ по п. 1, отличающийся тем, что формуляр цели содержит набор экстраполированных на момент выдачи формуляра параметров цели и их среднеквадратических отклонений, при поступлении каждого формуляра цели от источника в информационно-управляющую систему его дополняют системным временем получения формуляра.
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ОТМЕТОК ЦЕЛЕЙ, ПОЛУЧЕННЫХ ДВУМЯ ПРОСТРАНСТВЕННО-СОВМЕЩЕННЫМИ РЛС | 2017 |
|
RU2668214C2 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| Способ отождествления объектов, обнаруженных несколькими системами | 2017 |
|
RU2684440C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ ДВУХПОЗИЦИОННЫМИ ПАССИВНЫМИ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ | 2017 |
|
RU2656370C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ УХОДОВ НАВИГАЦИОННЫХ СИСТЕМ ПОДВИЖНЫХ НОСИТЕЛЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2504733C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| САВЧЕНКО Д.И | |||
| Повышение вероятностных характеристик отождествления целевой информации накоплением принимаемых решений // Журнал "Труды МАИ" | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Вып | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| US 2010315432 A1, | |||

