Изобретение относится к области подъемно-транспортного машиностроения и может быть использовано для сохранения собственной и грузовой устойчивости стационарных опорных и передвижных башенных кранов при действии порывов ветра.
Техническим результатом заявленного способа является повышение безопасности эксплуатации башенных кранов путем сохранения их устойчивости в условиях действия пульсирующей ветровой нагрузки.
Технический результат достигается за счет системы нейросетевого прогнозирования.
Известна система защиты грузоподъемного крана (RU 2316467 С1, МПК В66С 23/88, В66С 13/18), которая содержит цифровой вычислитель, внешнее запоминающее устройство, исполнительный блок и датчики параметров крана. Цифровой вычислитель содержит блок расчета вылета стрелы, блок расчета нагрузки на грузозахватном органе, блок определения момента, три компаратора и элемент ИЛИ. К первому входу цифрового вычислителя подключены выходы датчиков параметров крана, ко второму входу - внешнее запоминающее устройство, а к первому и второму выходам - соответствующие входы исполнительного блока.
Недостатком известного способа является невозможность учета порывистого характера ветрового воздействия для сохранения устойчивости башенного крана.
Известен способ безопасного управления башенным краном (RU 2319657 С2, МПК В66С 13/18, В66С 23/88, В66С 23/90), который включает операции периодического непрерывного опроса крана, во время которого получают, регистрируют, запоминают сигналы, соответствующие значениям грузовой характеристики крана, характеристики геометрии крана и характеристики режима работы крана, сравнивают полученные сигналы со значениями характеристик, введенными в систему управления краном перед началом его эксплуатации, причем после сравнения полученных при опросе сигналов с допустимыми значениями характеристик и при превышении их прекращают выполнение команды машиниста крана. В систему управления краном вводят дополнительно параметры условий работы крана, скорость ветра, температуру окружающей среды и параметры технического состояния крана, нагруженность, вибрацию, температуру смазки механизмов приводов крана, напряжений в элементах электрооборудования. Вводят в систему управления предельные значения указанных параметров и ограничения на работу приводов крана, при которых должна прекращаться работа крана или может выполняться при введении определенных ограничений в работу приводов крана, по скорости, ускорениям, совмещению и последовательности движений приводов, сравнивают полученные сигналы о работе и состоянии крана с допустимыми значениями, определяют возможность и условия для выполнения команды машиниста и оставляют команду без изменения, или накладывают ограничения на работу крана, вводя соответствующую корректировку в команду машиниста, или запрещают выполнение команды по заданной программе. Изобретение повышает безопасность работы башенного крана.
Недостатком известного способа является невозможность прогнозирования порывов ветра и корректировки положения стрелы в зависимости от преимущественного направления ветра.
Наиболее близким является способ управления башенным краном в аварийной ситуации и устройство для реализации способа (RU 2245838 С2, МПК В66С 13/18, В66С 15/00, В66С 23/88). Они и взяты за прототип. Способ включает выполнение из кабины операций подачи электропитания к приводам механизмов и средствам безопасности, включение привода по крайней мере одного механизма крана, его выключение и торможение. Подачу электропитания к приводам механизмов прекращают в аварийной ситуации с "земли" или с основания, на котором установлен кран. Затем с этого основания включают электропитание привода механизма крана, осуществляющего перевод крана из опасного положения в безопасное. Далее растормаживают механизм, включают его привод, и выводят кран в безопасное положение с помощью дополнительного пульта. Устройство содержит пульт управления, расположенный в кабине крана, средства безопасности - задатчик внешней нагрузки с электрическим входом и выходом, аварийный датчик и кнопку включения электропитания привода механизма крана. Кроме того, оно снабжено дополнительным пультом управления, расположенным на ходовой части в легкодоступном с основания месте. Дополнительный пульт управления соединен с основным пультом через выход задатчика внешней нагрузки, а также с помощью дополнительной обратной связи и выполнен с ключом-маркой и дополнительным выключателем. Привод механизма крана соединен с дополнительным пультом, а ключ-марка выполнен съемным и установлен в дополнительном пульте с возможностью взаимодействия с дополнительным выключателем.
Способ управления башенным краном, изложенный в прототипе, поясняется работой устройства для реализации способа в одном экстремальном случае работы крана.
Рассмотрен частный случай работы устройства при воздействии на башенный кран ураганного порыва ветра и внезапном возникновении угрозы падения крана, когда необходимо, чтобы машинист крана быстро эвакуировался из кабины и покинул кран, а последний был бы переведен в безопасное место для дополнительного закрепления.
Поскольку управление краном в экстренной ситуации ограничивается рядом действий, направленных исключительно для перевода крана в безопасное положение, то в упомянутом рассматриваемом случае необходимо растормозить механизм поворота стрелы башенного крана в горизонтальной плоскости с целью самоустановки стрелы по ветру и переместить кран по рельсовому пути в специально отведенное безопасное место стоянки, оборудованное дополнительными средствами его крепления на основании рельсового пути.
Недостатком известного способа является отсутствие алгоритма предупреждения порывов ветра и принятия решения для обеспечения устойчивости башенных кранов от опрокидывания.
Сущность заявленного способа заключается в обеспечении устойчивости башенных кранов от опрокидывания при пульсирующем воздействии ветровой нагрузки на основе нейросетевого алгоритма путем прогнозирования будущего значения скорости ветра, сравнения его с предельно допустимым значением и выдачи команды управления на исполнительные органы для корректировки положения стрелы с целью уменьшения давления на металлоконструкцию крана, обусловленного пульсациями ветровой нагрузки, до того как опрокидывающий момент от ветровой нагрузки достигнет критического значения. В приводе поворота применена активная система управления устойчивостью, целью которой является обеспечение принудительного поворота стрелы в зависимости от показаний датчиков.
На чертеже представлена структурная схема устройства, реализующего предлагаемый способ.
Устройство для обеспечения устойчивости башенных кранов, содержащее программируемый логический контроллер, первый вход которого соединен с выходом панели оператора, датчик скорости ветра и датчик положения стрелы, выходы которых соединены со вторым и третьим входами программируемого логического контроллера, исполнительные устройства, вход которых соединен с выходом программируемого логического контроллера, привод поворота, вход которого соединен с выходом исполнительных устройств, отличается тем, что оно дополнительно содержит плату расширения и датчик направления ветра, выходы которых соединены с четвертым и пятым входами программируемого логического контроллера.
Программируемый логический контроллер (1), формирующий команды управления, установлен в шкафу управления на кране; плата расширения (2), интегрированная в программируемый логический контроллер, необходима для обработки данных на основе методов искусственного интеллекта; панель оператора (3), установленная в кабине управления, служит для настройки и диагностики системы, мониторинга, индикации и архивации контролируемых параметров; датчик положения (4) стрелы установлен в механизме поворота; датчики направления (5) ветра и скорости (6) ветра расположены на наивысшей отметке башенного крана; исполнительные устройства (7) - катушки реле и контакторов, системы звуковой и световой сигнализации - смонтированы в шкафу управления; привод поворота (8) с векторным управлением с обратной связью по скорости установлен на механизме поворота.
Для достижения требуемого качества прогнозирования нейронную сеть необходимо обучить в стационарных условиях на основе значений максимальных скоростей ветра в районе установки крана, используя базу данных метеостанции, далее подключить плату расширения, содержащую предварительно обученный нейросетевой алгоритм, к программируемому логическому контроллеру.
Принцип работы активной системы в рабочем состоянии крана, реализуемой заявленным способом, заключается в следующем. С начала эксплуатации крана происходит регистрация показаний скорости и направления ветра, и предварительно обученная нейронная сеть на основе имеющейся базы данных максимальных скоростей ветра продолжает обучаться на регистрируемых значениях, прогнозирует будущее значение скорости и направления ветра. В штатном режиме при скорости ветра меньше критической для рабочего состояния на панели оператора (3) выводится сообщение о нормальном режиме работы. При прогнозировании опасного порыва и его направления, т.е. обладающего значительной энергией и превышающего допустимую скорость, и на основе сравнения сигналов с датчиков положения стрелы и направления ветра вычисляется угол рассогласования, далее происходит регистрация события об аварийной ситуации на карту памяти контроллера с резервной копией на карту памяти панели оператора (3), далее выводится индикация на панели оператора (3), включается сирена и программируемый логический контроллер формирует сигнал для приведения в действие противоугонных захватов (для передвижных башенных кранов) и сигнал управления, поступающий на исполнительные устройства привода поворота (8), для корректировки положения стрелы по наименьшей траектории (для уменьшения угла рассогласования) согласно прогнозируемому направлению порыва ветра на основе датчиков положения (4) стрелы, направления (5) ветра и скорости (6) ветра. При этом поворот стрелы производится до того, как опрокидывающий момент от ветровой нагрузки достигнет предельного значения.
В нерабочем состоянии крана система нейросетевого прогнозирования продолжает функционировать за счет питания от дополнительного источника. При этом кран переводится в нерабочее состояние согласно руководству по эксплуатации на данный тип крана. При работе системы прогнозирования в нерабочем состоянии продолжается пополнение базы данных скоростей ветра, что повышает точность прогноза в рабочем состоянии.
Предлагаемое изобретение позволит повысить безопасность эксплуатации башенных кранов путем сохранения их устойчивости при пульсирующем ветровом воздействии.
Источники информации
1. Патент RU 2316467 С1.
2. Патент RU 2319657 С2.
3. Патент RU 2245838 С2 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ БАШЕННЫХ КРАНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2525351C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ СТАЦИОНАРНОГО БАШЕННОГО КРАНА | 2010 |
|
RU2426684C1 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2009 |
|
RU2396202C1 |
| СПОСОБ УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ В АВАРИЙНОЙ СИТУАЦИИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2245838C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ ПОВОРОТНОЙ ЧАСТИ БАШЕННОГО КРАНА | 2009 |
|
RU2499762C2 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ | 2006 |
|
RU2319657C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОВОЙ УСТОЙЧИВОСТЬЮ МОБИЛЬНОГО ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349536C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |
Изобретение относится к области подъемно-транспортного машиностроения. Для обеспечения устойчивости башенных кранов от опрокидывания создают базу данных максимальных скоростей ветра в районе установки крана. На их основе предварительно обучают алгоритм нейронной сети в стационарных условиях. Подключают плату расширения (2) к программируемому логическому контроллеру (1). В процессе работы крана регистрируют показания скорости ветра, направления ветра и положения стрелы. Сравнивают сигналы с датчиков положения стрелы (4) и направления ветра (5) и вычисляют угол рассогласования. На базе алгоритма программируемого логического контроллера (1) осуществляют прогнозирование будущего значения скорости ветра. Сравнивают его с предельно допустимым значением для данной модели крана и посредством программируемого логического контроллера (1) формируют команду управления для приведения в действие противоугонных захватов (для передвижных башенных кранов) и команду управления, поступающую на исполнительные устройства (7) привода поворота (8) для корректировки положения стрелы по наименьшей траектории согласно прогнозируемому направлению порыва ветра, до того как опрокидывающий момент от ветровой нагрузки достигнет критического значения. Достигается повышение безопасности. 1 ил.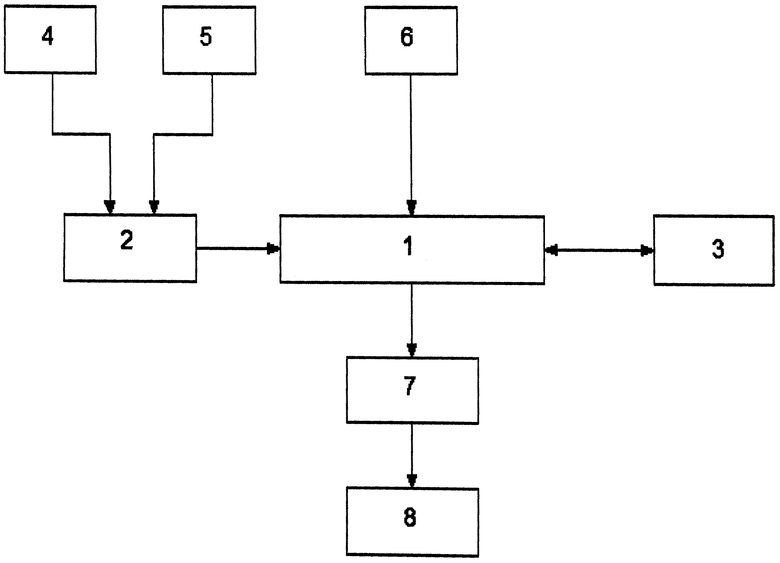
Способ обеспечения устойчивости башенных кранов от опрокидывания, осуществляемый путем учета параметров внешних факторов, отличающийся тем, что создают базу данных максимальных скоростей ветра в районе установки крана, на их основе предварительно обучают алгоритм нейронной сети в стационарных условиях, подключают плату расширения к программируемому логическому контроллеру, который расположен в шкафу управления на кране, далее в процессе работы крана регистрируют показания скорости ветра, направления ветра и положения стрелы, сравнивают сигналы с датчиков положения стрелы и направления ветра и вычисляют угол рассогласования, затем на базе алгоритма программируемого логического контроллера осуществляют прогнозирование будущего значения скорости ветра, далее сравнивают его с предельно допустимым значением для данной модели крана и посредством программируемого логического контроллера формируют команду управления для приведения в действие противоугонных захватов (для передвижных башенных кранов) и команду управления, поступающую на исполнительные устройства привода поворота для корректировки положения стрелы по наименьшей траектории согласно прогнозируемому направлению порыва ветра, до того как опрокидывающий момент от ветровой нагрузки достигнет критического значения.

