Данное техническое решение относится к средствам и способам безопасной работы грузоподъемных машин, системы безопасности которых работают на принципе ограничения, разрешения или запрещения движений крана и его рабочего органа, а также разрешения или запрещения включения по крайней мере одного привода крана. Изобретение предназначено для его использования преимущественно в конструкциях башенных кранов.
Известно устройство ограничения нагрузок, в частности ограничитель грузоподъемности стрелового крана, содержащее цифровой вычислительный блок, аналого-цифровой преобразователь, цифровой запоминающий блок, синтезатор звука, блок визуальной индикации, исполнительный блок, датчики аналоговых и дискретных сигналов [1].
Известен ограничитель нагрузок крана, содержащий блок обработки данных и датчики параметров крана, цифровой вычислительный блок, связанный с датчиками параметров крана, при этом блок обработки данных имеет средства телеметрической памяти для записи и хранения информации о параметрах крана [2, 3].
Ограничитель рассчитывает степень загрузки крана, сравнивает ее с допустимой нагрузкой и выдает сигналы на исполнительный блок для отключения запрещенных движений крана. Блок телеметрической памяти записывает и хранит информацию о параметрах работы крана.
Ограничитель имеет существенные недостатки, основным из которых является недостаточный объем регистрируемых параметров, характеризующих техническое состояние крана и его готовность к безопасной работе. Малый объем регистрируемых параметров известным устройством снижает достоверность информации, что оказывает отрицательное действие на безопасность крана. При этом устройство имеет сложное подключение к системе управления краном.
Известно устройство безопасности грузоподъемного крана, содержащее блок защиты от опасного напряжения, блок задания ограничений координатной защиты, цифровой вычислительный модуль, связанный с датчиками параметров и выполненный с возможностью формирования сигнала запрещения движений при перегрузке крана, исполнительный блок с модулем блокировки движений и модулем аварийной сигнализации, подключенным к первому выходу цифрового вычислительного модуля, введены модуль анализатора и логический модуль, первый выход модуля анализатора сигнала соединен с первым входом логического модуля, а второй выход подключен к второму входу модуля сигнализации, выход блока защиты от опасного напряжения связан с входом модуля анализатора сигнала, выходы блока задания ограничения координатной защиты подключены к задающему входу цифрового вычислительного модуля, третий вход которого соединен с вторым входом цифрового вычислительного модуля, а выход - с входом модуля блокировки движений [4].
Известно устройство управления грузоподъемными механизмами с фиксацией характеристик, касающихся нагрузки, геометрии крана и режима его работы, причем устройство имеет вычислительный цифровой блок, запоминающее устройство с входом-выходом, контроллер памяти, датчики аналоговых параметров крана, подключенные к входам аналогово-цифрового преобразователя [5].
Известно устройство для регулирования положения груза грузоподъемного крана, содержащее датчик положения груза, связанный с блоком управления и вычислительным блоком [6].
Известны также устройства безопасности, включенные в системы управления многодвигательными приводами грузоподъемных кранов, причем каждое устройство безопасности содержат датчики параметров крана, соединенные с блоком памяти или блоком обработки информации или с блоком отображения информации [7-14].
Известно устройство безопасности башенного крана, содержащее датчики, соответственно, вылета, нагрузки, скорости ветра, передвижения крана, высоты подъема крюка и угла поворота крана, блок обработки и отображения информации, блок питания, посредством которого датчики соединены с блоком обработки и отображения информации [15].
Наиболее близким техническим решением к техническому решению, представленному в данном описании изобретения, по сущности и достигаемому результату является способ безопасного управления башенным краном, включающий операции периодического непрерывного опроса крана, во время которого получают, регистрируют, запоминают сигналы, соответствующие значениям грузовой характеристики крана, характеристики геометрии крана и характеристики режима работы крана, сравнивают полученные сигналы со значениями характеристик, введенными в систему управления краном перед началом его эксплуатации, причем после сравнения полученных при опросе сигналов с допустимыми значениями характеристик и при превышении их, прекращают выполнение команды машиниста крана [7].
Техническим результатом данного заявленного способа является повышение безопасности работы башенного крана.
Для этого в способе безопасного управления башенным краном, включающем операции периодического непрерывного опроса крана, во время которого получают, регистрируют, запоминают сигналы, соответствующие значениям грузовой характеристики крана, характеристики геометрии крана и характеристики режима работы крана, сравнивают полученные сигналы со значениями характеристик, введенными в систему управления краном перед началом его эксплуатации, причем после сравнения полученных при опросе сигналов с допустимыми значениями характеристик и при превышении их прекращают выполнение команды машиниста крана, в систему управления краном вводят дополнительно параметры условий работы крана, например скорость ветра, температуру окружающей среды и другие параметры, и параметры технического состояния крана, например нагруженность, вибрацию, температуру смазки механизмов приводов крана, напряжений в элементах электрооборудования, которые в совокупности с введенными характеристиками определяют требования к безопасной эксплуатации крана, а также дополнительно вводят в систему управления предельные значения указанных параметров и ограничения на работу приводов крана, при которых должна прекращаться работа крана или может выполняться при введении определенных ограничений в работу приводов крана, например, по скорости, ускорениям, совмещению и последовательности движений приводов, сравнивают полученные сигналы о работе и состоянии крана с предельными значениями, определяют возможность и условия для выполнения команды машиниста и оставляют команду без изменения, или накладывают ограничения на работу крана, вводя соответствующую корректировку в команду машиниста, или запрещают выполнение команды по заданной программе.
Данный способ реализуется при использовании программы управления, позволяющей формировать, передавать, регистрировать, сравнивать с системой управления краном информационные массивы, а также анализировать полученные массивы, выдавать обработанные данные на дисплей блока отображения информации и после сопоставления полученных данных с предельными значениями принимать решения по управлению краном.
На чертеже представлена схема устройства для реализации способа.
Устройство содержит датчик 1 вылета груза, датчик 2 нагрузки крана, определяющий вес груза на крюке крана, входящий в блок датчиков условий работы крана датчик 3 скорости ветра, датчик 4 горизонтального передвижения крана по рельсовому пути, датчик 5 высоты подъема крюка крана, датчик 6 угла поворота крана вокруг собственной вертикальной оси. Устройство содержит блок 7 обработки и отображения информации и соединенный с ним блок 8 питания. Все указанные датчики 1-6 соединены с блоком 7 обработки и отображения информации через блок питания 8. В блоке 7 имеется микропроцессор (не показан) и вход-выход 9 для соединения блока посредством двухстороннего канала или кабеля 10 связи с центральным процессором 11 системы управления башенного крана. Позицией 12 показан контроллер системы управления башенного крана, через который датчики 4-6 соединены с блоком питания и блоком 7 обработки и отображения информации.
Устройство для реализации способа имеет блок 13 датчиков условий работы крана. Этот блок включает датчики окружающей среды, например, датчик 3 скорости ветра, датчик температуры окружающей среды (не показан) и другие датчики. Устройство имеет блок 14 определения технического состояния крана, который включает датчики нагруженности узлов крана, датчики температуры смазки механизмов крана, датчики напряжения в элементах электрооборудования и другие датчики (не показаны). Блоки 13 и 14 соединены с блоком 8 питания и через него - с блоком 7 обработки и отображения информации. На схеме показан блок 15 исполнительных устройств приводов крана, соединенный с процессором 11 и через него - с блоком 7 обработки и отображения информации.
Способ поясняется работой устройства. Перед началом работы крана в устройство для всех характеристик, а также параметров условий работы и состояния крана вводят предельные значения и ограничения на работу приводов при достижении предельных значений по скорости, ускорениям, совмещению и последовательности движений.
Во время работы устройства микропроцессор блока 7 непрерывно от начала включения блока 8 питания (или от начала подачи электропитания на кран и его механизмы) и до отключения блока 8 питания периодически и непрерывно по заданной программе опрашивает датчики 1-6 и датчики блоков 13 и 14 и на основе полученной информации от датчиков о состоянии крана и условий его работы, а также на основе полученной информации о состоянии самих датчиков, формирует информационный массив текущих значений параметров и передает их в центральный процессор 11, при этом устройство отображает и регистрирует полученные данные параметры.
Вышеуказанный опрос от начала включения и до отключения блока 8 питания ведут постоянно, непрерывно и циклично, например, в интервале времени 0,01÷1 сек и постоянно, в этом интервале времени, записывают и обрабатывают полученные данные о техническом состоянии крана и условиях его работы. После получения информации за время регистрации данных в указанном интервале времени, подают команду на выполнение или изменение движения или на прекращение движения крана.
Для этого процессор 11 сравнивает полученные сигналы о работе и состоянии крана с предельными значениями, определяет возможность и условия выполнения команды машиниста. При этом в случае, если работа крана возможна по условиям безопасности, то в центральный процессор 11 выдается информация по каналу связи 10 о необходимости выполнения команды машиниста.
Если процессор 11 определяет, что условия работы крана не соответствуют требованиям безопасности, то накладываются ограничения на выполнение команды. Например, при грузе, превышающем предельные значения на установленную величину, вводятся ограничения, позволяющие выполнять работу механизма подъема груза с пониженной скоростью и заданным ускорением, а также наложением ограничения по направлению движения и скорости изменения вылета.
В случае если работа крана недопустима при измеренных текущих значениях характеристик и параметров, то по заданной программе запрещается команда машиниста на выполнение движений приводов.
Источники информации
1. RU 2011632 С1, 30.04.1994.
2. RU 7097 U1, 1998.
3. Ограничитель нагрузки ОНК-140, Руководство по эксплуатации, ЛГФИ, 408844.009 РЭ, Арзамас Нижегородсткой обл., ОАО «Арзамасский приборостроительный завод», 1998.
4. RU 2151732 C1, 28.01.1999.
5. RU 2116240, 27.07.1998.
6. FR 2698344, 27.05.1994.
7. RU 2116240 C1, 27.07.1998 (прототип).
8. RU 2011632 С1, 30.04.1994.
9. RU 2129524, 22.04.1999.
10. RU 2093452, 20.10.1997.
11. ЕР 0394412 В1, 18.10.89.
12. JP 4862199, 25.02.1999.
13. ЕР 1032117 А2, 14.02.89.
14. RU2234185 C1, 08.10.2004.
15. Ограничитель нагрузки башенного крана ОНК-160Б: Руководство по эксплуатации: ЛГФИ.408844. 025-01РЭ, ОАО Арзамасский приборостроительный завод, 21.04.2004 г., с.9.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ БАШЕННОГО КРАНА | 2005 |
|
RU2286305C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
| СПОСОБ УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ В АВАРИЙНОЙ СИТУАЦИИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2245838C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ БАШЕННЫХ КРАНОВ ОТ ОПРОКИДЫВАНИЯ | 2012 |
|
RU2542850C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ СТАЦИОНАРНОГО БАШЕННОГО КРАНА | 2010 |
|
RU2426684C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ БАШЕННЫХ КРАНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2525351C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА С ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2333881C1 |
| КАБИНА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2002 |
|
RU2225343C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2009 |
|
RU2396202C1 |
Изобретение относится к способам безопасной работы грузоподъемных машин, в частности в конструкциях башенных кранов. Способ включает операции периодического непрерывного опроса крана, во время которого получают, регистрируют, запоминают сигналы, соответствующие значениям грузовой характеристики крана, характеристики геометрии крана и характеристики режима работы крана, сравнивают полученные сигналы со значениями характеристик, введенными в систему управления краном перед началом его эксплуатации, причем после сравнения полученных при опросе сигналов с допустимыми значениями характеристик и при превышении их прекращают выполнение команды машиниста крана. В систему управления краном вводят дополнительно параметры условий работы крана, скорость ветра, температуру окружающей среды и параметры технического состояния крана, нагруженность, вибрацию, температуру смазки механизмов приводов крана, напряжений в элементах электрооборудования. Вводят в систему управления предельные значения указанных параметров и ограничения на работу приводов крана, при которых должна прекращаться работа крана или может выполняться при введении определенных ограничений в работу приводов крана, по скорости, ускорениям, совмещению и последовательности движений приводов, сравнивают полученные сигналы о работе и состоянии крана с допустимыми значениями, определяют возможность и условия для выполнения команды машиниста и оставляют команду без изменения, или накладывают ограничения на работу крана, вводя соответствующую корректировку в команду машиниста, или запрещают выполнение команды по заданной программе. Изобретение повышает безопасность работы башенного крана. 1 ил.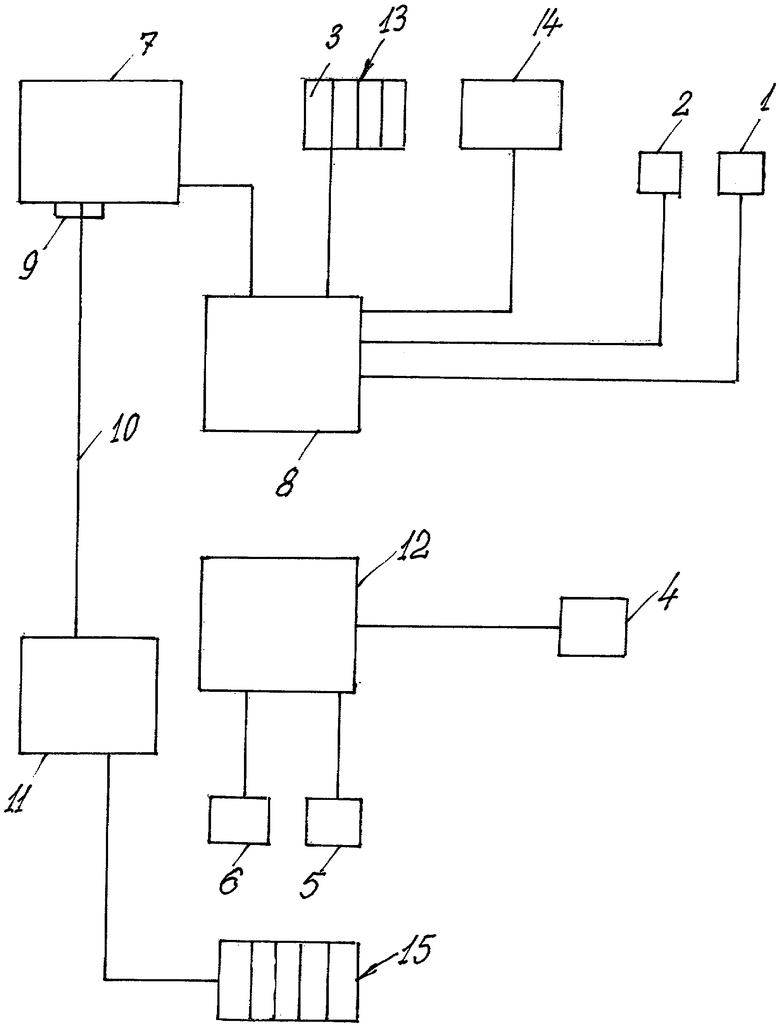
Способ безопасного управления башенным краном, включающий операции периодического непрерывного опроса крана, во время которого получают, регистрируют, запоминают сигналы, соответствующие значениям грузовой характеристики крана, характеристики геометрии крана и характеристики режима работы крана, сравнивают полученные сигналы со значениями характеристик, введенными в систему управления краном перед началом его эксплуатации, причем после сравнения полученных при опросе сигналов с допустимыми значениями характеристик и при превышении их прекращают выполнение команды машиниста крана, отличающийся тем, что в систему управления краном вводят дополнительно параметры условий работы крана, например скорость ветра, температуру окружающей среды и другие параметры, и параметры технического состояния крана, например нагруженность, вибрацию, температуру смазки механизмов приводов крана, напряжений в элементах электрооборудования, которые в совокупности с введенными характеристиками определяют требования к безопасной эксплуатации крана, а также дополнительно вводят в систему управления предельные значения указанных параметров и ограничения на работу приводов крана, при которых должна прекращаться работа крана или может выполняться при введении определенных ограничений в работу приводов крана, например, по скорости, ускорениям, совмещению и последовательности движений приводов, сравнивают полученные сигналы о работе и состоянии крана с допустимыми значениями, определяют возможность и условия для выполнения команды машиниста и оставляют команду без изменения или накладывают ограничения на работу крана, вводя соответствующую корректировку в команду машиниста, или запрещают выполнение команды по заданной программе.
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМИ МЕХАНИЗМАМИ С ФИКСАЦИЕЙ ИХ ХАРАКТЕРИСТИК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2116240C1 |
| RU 2004134628 А, 20.04.2005 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.М.Гохберга | |||
| - Л.: Машиностроение, 1988, с.125-137, c.448-554 | |||
| Регулятор толщины слоя несмешивающийся жидкости в делительных аппаратах | 1935 |
|
SU48182A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ СВЯЗУЮЩЕГО ВЕЩЕСТВА ДЛЯ ШИШЕЛЬНЫХ ЗЕМЕЛЬ | 1934 |
|
SU38747A1 |
| СПОСОБ ДЕАРОМАТИЗАЦИИ ЖИДКИХ ПАРАФИНОВ | 0 |
|
SU394412A1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232709C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2237006C2 |

