Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты от перегрузок грузоподъемных кранов со съемными или передвижными противовесами, в том числе кранов-трубоукладчиков с откидывающимися противовесами.
Известен ограничитель нагрузки грузоподъемного крана, содержащий цифровой вычислитель, к информационным входам которого подключены датчики параметров крана, в том числе датчики нагрузки, углов наклона неповоротной части крана и положения противовеса с переменным вылетом, причем вычислитель выполнен с возможностью изменения максимально допустимых значений углов продольного и поперечного наклона крана в зависимости от положения противовеса [1].
Недостатком этого технического решения является недостаточно полный учет влияния положения противовеса на безопасность работы крана, поскольку это положение учитывается лишь при определении максимальных значений продольного и поперечного наклона крана при его движении без груза.
Известен также ограничитель нагрузки стрелового крана, содержащий цифровой вычислитель, к входам которого подключены датчики параметров крана, в том числе датчики нагрузки и массы противовеса, а к выходам - блок визуальной индикации, блок звуковой сигнализации и исполнительное устройство, причем цифровой вычислитель приспособлен для изменения программы своей работы в соответствии с измеренной массой противовеса [2].
Недостатком этого ограничителя является повышенная сложность его реализации, поскольку конструктивное исполнение датчика массы противовеса существенно сложнее датчика его пространственного положения и требует вмешательства в силовые конструкции крепления противовеса на кране.
Наиболее близким к предложенному является ограничитель нагрузки грузоподъемного крана с графическим дисплеем, содержащий исполнительное устройство и соединенный с ним цифровой вычислитель, к информационным входам которого подключены датчики нагрузки и пространственного положения стрелы и противовеса крана. В этом ограничителе цифровой вычислитель обеспечивает отображение на экране дисплея информации о рабочей зоне крана из условия предотвращения перегрузки крана и его столкновений с препятствиями с учетом положения противовеса, а также передачу на исполнительное устройство сигналов блокирования движений крана при реализации его защиты от перегрузки с учетом положения противовеса [3].
Недостатком этого ограничителя являются невысокие функциональные возможности при реализации защиты крана, вызванные отсутствием контроля и индикации положений отдельных грузов наборного противовеса, отсутствием функций управления положением противовеса и т.д.
Техническим результатом, на достижение которого направлено изобретение, является повышение безопасности работы стрелового крана и эффективности его работы путем расширения функциональных возможностей ограничителя грузоподъемности, в том числе за счет:
- реализации контроля пространственного положения не только наборного противовеса в целом, но и его отдельных грузов, а также учета в программе работы цифрового вычислителя массы и положения каждого груза;
- формирования для оператора крана дополнительного предупредительного сигнала о снижении грузовой устойчивости крана по причине отсутствия на противовесной консоли или на поворотной платформе крана какого-либо груза противовеса или его ненадлежащего пространственного положения;
- формирования рекомендаций оператору крана о необходимости или целесообразности изменения пространственного положения груза или грузов противовеса;
- формирования сигналов автоматического управления приводом перемещения груза или грузов противовеса из условия обеспечения безопасности работы крана;
- формирования сигнала ограничения транспортной скорости передвижения грузоподъемного крана в случае, если передвижной или дополнительный съемный противовес не переведен в транспортное положение.
В ограничителе нагрузки стрелового крана, содержащем датчики, установленные на кране и выполненные с возможностью измерения параметров, характеризующих нагрузку, пространственное положение его стрелы и/или грузозахватного органа и пространственное положение противовеса, исполнительное устройство и соединенный с ним цифровой вычислитель, выполненный с возможностью приема и обработки выходных сигналов датчиков и определения текущего значения нагрузки крана, сравнения текущего значения нагрузки с максимально допустимой нагрузкой, предварительно записанной в его запоминающее устройство, а также с возможностью формирования предупредительного сигнала и/или передачи на исполнительное устройство сигнала блокирования движений крана, направленного на предотвращение его перегрузки, указанные технические результаты достигаются за счет того, что датчик пространственного положения противовеса выполнен в виде датчика наличия и/или пространственного положения одного или нескольких грузов съемного или передвигаемого противовеса на противовесной консоли или на поворотной платформе крана, а цифровой вычислитель дополнительно выполнен с возможностью реализации одной или нескольких функций:
- формирования дополнительного предупредительного сигнала об отсутствии и/или пространственном положении груза или грузов противовеса, снижающем грузовую устойчивость крана;
- формирования рекомендаций оператору крана о необходимости или целесообразности изменения пространственного положения груза или грузов противовеса;
- формирования сигналов автоматического управления приводом перемещения груза или грузов противовеса из условия обеспечения безопасности работы крана.
Для достижения указанных технических результатов ограничитель может быть оснащен, по меньшей мере, одним дискретным световым, звуковым, символьным и/или графическим индикатором или дисплеем, соединенным с цифровым вычислителем или входящим в его состав.
Кроме того, для достижения этих результатов, в различных вариантах реализации предложенного технического решения:
- цифровой вычислитель выполнен с возможностью автоматического управления приводом противовеса в зависимости от текущего значения массы груза на грузозахватном органе (крюке) или грузового момента, или при выявлении команды оператора по переводу крана в состояние меньшей грузовой устойчивости, например команды на опускание стрелы или поворот крана в сторону меньшей устойчивости, или из условия одновременного достижения собственной и/или грузовой устойчивости крана против опрокидывания и предотвращения столкновений противовеса с препятствием в соответствии с параметрами или координатами этого препятствия, предварительно записанными в память цифрового вычислителя;
- ограничитель дополнительно оснащен датчиком скорости и/или направления ветра, а цифровой вычислитель выполнен с возможностью учета выходных сигналов этого датчика при формировании предупредительного сигнала, и/или при передаче на исполнительное устройство сигнала блокирования движений крана или перемещения противовеса, и/или при передаче на исполнительное устройство сигнала автоматического управления приводом перемещения противовеса из условия повышения устойчивости крана;
- значения массы груза или каждого груза противовеса предварительно записывают в память цифрового вычислителя и учитывают в программе его работы;
- датчик наличия или пространственного положения каждого груза противовеса выполнен с использованием технологии бесконтактной идентификации в виде прикрепленного к грузу транспондера или идентификатора и устройства считывания информации с него, причем транспондер или идентификатор груза выполнен, в частности, с возможностью хранения и передачи информации о массе этого груза и/или месте его установки, а устройство считывания информации выполнено с возможностью передачи этой информации в цифровой вычислитель, который приспособлен для изменения программы своей работы в соответствии с полученной информацией;
- датчик наличия или пространственного положения одного или нескольких грузов противовеса выполнен в виде бесконтактного ультразвукового, или емкостного, или индуктивного, или оптического, или радиолокационного дальномера без отражателя, с пассивным отражателем сигнала или с активным ответчиком;
- датчик наличия или пространственного положения одного или нескольких грузов противовеса выполнен электромеханическим - в виде концевого выключателя, набора концевых выключателей, потенциометра с передаточным устройством, линейного энкодера или иного устройства, выполненного с возможностью механического взаимодействия с грузом противовеса;
- цифровой вычислитель выполнен с возможностью выявления перемещения передвижного или дополнительного съемного противовеса в транспортное положение и соответствующего формирования и передачи на исполнительное устройство сигнала ограничения транспортной скорости передвижения грузоподъемного крана.
Такое выполнение ограничителя нагрузки стрелового крана позволяет в процессе его функционирования при ручном или автоматизированном управлении максимально полно учитывать влияние противовеса как на собственную, так и на грузовую устойчивость грузоподъемного крана. При этом обеспечивается повышение безопасности и эффективности работы крана за счет оптимизации плеча (вылета) и массы противовеса для наиболее эффективного уравновешивания момента от массы механизмов и металлоконструкций крана и части момента от поднимаемого и перемещаемого груза.
На чертеже приведена упрощенная блок-схема ограничителя.
Ограничитель нагрузки стрелового крана, который может именоваться также устройством, контроллером, прибором или системой защиты или безопасности, содержит цифровой вычислитель 1, к информационным входам которого подключены датчики 2 параметров крана, а к выходам - исполнительное устройство 3.
Цифровой вычислитель 1, который может именоваться также блоком обработки данных, блоком индикации, контроллером, панелью оператора и т.п., реализован на основе микроконтроллера 4, к которому подключены устройство отображения информации 5, энергонезависимое запоминающее устройство 6, органы управления 7 и устройство ввода/вывода информации 8. В состав цифрового вычислителя 1 могут дополнительно входить устройство звуковой сигнализации, часы реального времени и другие функциональные узлы ограничителя, подключенные непосредственно к микроконтроллеру 4 или к устройству ввода/вывода информации 8.
Органы управления 7 выполнены в виде набора кнопок/клавиш, переключателей, сенсорного экрана дисплея - устройства отображения информации 5 и т.п.
Устройство отображения информации 5 может быть размещено в цифровом вычислителе 1 или вне его и может содержать как символьный, так и графический, например жидкокристаллический TFT, индикатор (дисплей) и/или набор светодиодных индикаторов.
Устройство ввода/вывода информации 8 обеспечивает согласование логических уровней входных и выходных сигналов микроконтроллера 4 с другими функциональными устройствами ограничителя. Передача данных в ограничителе, в зависимости от варианта исполнения устройства ввода/вывода информации 8 и интерфейсных схем подключенных к нему датчиков 2, осуществляется по радиальной схеме при помощи отдельных проводов, по мультиплексному каналу обмена данными (CAN, LIN, RS-485 и т.д.) и/или по радиоканалу (ZigBee, Bluetooth, Wi-Fi и т.д.).
Исполнительное устройство 3, которое может именоваться также выходным или силовым блоком, блоком расширения, выходным контроллером и т.п., выполнено в виде набора силовых реле или электронных ключей, подключенных к электрогидравлическим или электромеханическим исполнительным устройствам приводов грузоподъемного крана. При необходимости оно может содержать микроконтроллер и интерфейсную схему для проводной или беспроводной связи с цифровым вычислителем 1.
Набор датчиков 2 зависит от варианта реализации предложенного ограничителя и от типа грузоподъемного крана - башенный или самоходный, с телескопической или решетчатой стрелой, с гидравлическим или канатным приводом механизма подъема стрелы и т.д. Датчики 2 включают в себя датчик нагрузки крана 9 (датчик усилия в стреловом или грузовом канате или датчики давления в гидроцилиндре подъема стрелы), датчики пространственного положения стрелы и грузозахватного органа 10 (датчики угла наклона и длины стрелы, угла поворота поворотной площадки крана, предельного подъема грузозахватного органа и т.д.) и датчик (датчики) наличия и/или положения противовеса в целом или его отдельных грузов 11. В состав ограничителя могут также входить датчик ветра 12, датчик приближения к линии электропередачи, датчики положений органов ручного управления исполнительными механизмами крана, датчики положений выносных опор крана и другие датчики.
Датчики 2 могут быть объединены в группы по месту их расположения на грузоподъемном кране, например на оголовке телескопируемой стрелы, на неповоротной части крана и т.д. В этом случае каждая группа датчиков снабжается контроллером, осуществляющим усиление, нормирование, фильтрацию, термокомпенсацию и лианеризацию сигналов датчиков перед их передачей в цифровой вычислитель 1.
Датчик 11 наличия или пространственного положения груза противовеса на противовесной консоли или на поворотной платформе крана может быть выполнен с использованием технологии бесконтактной идентификации (RFID). В этом случае к каждому грузу противовеса прикрепляется транспондер или идентификатор - активная или пассивная RFID метка, а на противовесной консоли или на поворотной платформе крана в непосредственной близости от штатного расположения груза противовеса устанавливается считыватель меток, соединенный с устройством ввода/вывода информации 8.
Если отдельные грузы противовеса в транспортном и в рабочем состояниях грузоподъемного крана находятся в различных положениях, то ограничитель может содержать два или более считывателя RFID меток, что позволяет определить пространственное положение этих грузов, в частности их перевод в рабочее или транспортное положение.
Транспондер или идентификатор каждого груза противовеса (RFID метка каждого груза) может содержать и передавать в считыватель по его запросу предварительно записанную в эту метку информацию о массе груза и/или штатном месте его установки на противовесной консоли или на поворотной платформе крана. Это позволяет цифровому вычислителю 1 выявлять правильность сборки наборного противовеса (комплекта чугунных или бетонных брусьев или плит противовеса). Полученная информация о наличии на штатном месте и массе каждого груза противовеса используется микроконтроллером 4 цифрового вычислителя 1 для корректировки формируемых им информационных, предупреждающих сигналов и сигналов блокирования и управления приводами крана.
Датчик 11 наличия или пространственного положения одного или нескольких грузов противовеса может быть выполнен в виде бесконтактного ультразвукового, емкостного, индуктивного, оптического или радиолокационного дальномера с отражением сигнала непосредственно от груза, с использованием пассивного отражателя сигнала или активного ответчика, прикрепленного к грузу противовеса. Этот датчик (или набор датчиков) 11 может быть также выполнен электромеханическим - в виде концевого выключателя, набора концевых выключателей, потенциометра с передаточным устройством, линейного энкодера или иного устройства, выполненного с возможностью механического взаимодействия с грузом противовеса. При этом может использоваться измерение углового положения какого-либо элемента крана или самого противовеса, если это угловое положение оказывает влияние на плечо противовеса или взаимосвязано с его линейным положением.
Ограничитель нагрузки стрелового крана работает следующим образом.
Перед началом работы грузоподъемного крана в запоминающее устройство 6 или в память микроконтроллера 4 цифрового вычислителя 1 предварительно в виде формул - подпрограмм микроконтроллера, разработанных с использованием математической модели крана, или в виде таблиц записываются допустимые величины нагрузок грузоподъемного крана для различных пространственных положений его стрелы и грузозахватного органа и для различных пространственных положений противовеса или его отдельных грузов в различных режимах работы крана (с полным или неполным опорным контуром, с различным стреловым оборудованием и т.д.). Допустимые величины нагрузок грузоподъемного крана устанавливаются также с учетом ветровой нагрузки, действующей на кран.
Оператор (крановщик) при помощи органов управления 7 осуществляет ввод в память микроконтроллера 4 параметров ограничений по координатной защите (параметров зоны допустимых положений стрелового оборудования, грузозахватного органа и противовеса) крана, а также параметров самого грузоподъемного крана, характеризующих его геометрию, условия и режим работы. К ним относятся вид используемого стрелового оборудования (наличие, длина и угол наклона гуська), характеристики опорного контура и т.д.
Микроконтроллер 4 работает по программе, записанной в его встроенной памяти программ или в запоминающем устройстве 6, и через устройство ввода/вывода информации 8 осуществляет обмен информацией с датчиками 2 параметров работы крана. После получения информации от датчиков 2, микроконтроллер 4 определяет действительное значение текущей нагрузки крана, фактическое положения грузоподъемного (стрелового) оборудования крана и запас его грузовой устойчивости. Для их определения, при необходимости, осуществляются необходимые преобразования выходных сигналов датчиков 2. Это имеет место в случае, когда текущая нагрузка крана и/или положение грузоподъемного (стрелового) оборудования измеряются косвенным образом, например при определении нагрузки стрелового гидравлического крана по давлениям в штоковой и поршневой полостях гидроцилиндра подъема стрелы.
Далее микроконтроллер 4 цифрового вычислителя 1 осуществляет сравнение фактического нагружения крана с предельно допустимым, а также сравнение фактического положения грузоподъемного (стрелового) оборудования с его допустимыми положениями, и, в зависимости от результатов этих сравнений, выдает сигнал на исполнительное устройство 3 на разрешение или запрещение отдельных видов движений крана.
Дополнительно цифровой вычислитель 1 контролирует наличие и положение на штатном месте на противовесной консоли или на поворотной платформе крана противовеса (или отдельных грузов наборного противовеса) и, при необходимости, формирует, и передает на исполнительное устройство 3 сигналы автоматического управления приводом перемещения (придвижения или откидывания) противовеса или его отдельных грузов. При этом осуществляется увеличение/уменьшение плеча (вылета) противовеса при выявлении в текущий момент времени увеличения/уменьшения массы груза на грузозахватном органе (крюке) или грузового момента. Дополнительно может осуществляться упреждающее формирование сигналов автоматического управления приводом перемещения противовеса, направленных на увеличение его плеча при выявлении команды оператора по переводу крана в состояние меньшей грузовой устойчивости, например, команды на опускание стрелы или поворот крана в сторону меньшей устойчивости.
Автоматическое управление положением противовеса или его отдельных грузов осуществляется, в общем случае, с учетом одновременного достижения как необходимого запаса собственной и/или грузовой устойчивости крана против опрокидывания, так и предотвращения столкновений противовеса с препятствиями при работе крана в стесненных условиях (в соответствии с параметрами или координатами этих препятствий, предварительно записанными оператором с органов управления 7 в память цифрового вычислителя 1).
Благодаря этому обеспечивается защита грузоподъемного крана от перегрузки и от столкновений с различными препятствиями (координатная защита) с учетом наличия на противовесной консоли или на поворотной платформе крана грузов противовеса, предусмотренных конструкцией данного крана, положения грузов противовеса (плеча или вылета противовеса), а также величины и скорости ветра.
Если конструкцией грузоподъемного крана предусмотрено перемещение передвижного или дополнительного съемного противовеса в транспортное положение (например, на автомобильных кранах КС-55721, КС-55729-1Б и т.п.), то цифровой вычислитель 1 дополнительно формирует сигнал ограничения транспортной скорости передвижения крана, если после окончания его работы этот противовес не перемещен в транспортное положение. Уровень ограничения транспортной скорости крана предварительно записывается в память цифрового вычислителя 1 или определяется им исходя из требования безопасности передвижения крана.
Одновременно с формированием сигналов на исполнительное устройство 3, цифровой вычислитель 1 выдает на устройство отображения информации 5 сигналы, информирующие оператора о параметрах работы крана, предупреждающие оператора о возникновении потенциально опасных ситуаций, а также содержащие информацию рекомендательного характера о необходимости или целесообразности выполнения каких-либо операций по управлению краном, в частности изменения пространственного положения противовеса.
Для документирования работы грузоподъемного крана ограничитель может содержать внешний или встроенный регистратор параметров, реализованный на основе запоминающего устройства 6, в который микроконтроллер 4 записывает значения основных рабочих параметров крана (значение грузового момента, угол наклона и длина стрелы и т.п.), предупреждающих сигналов и сигналов управления краном с целью их последующего считывания для анализа эффективности работы крана и для расследования причин возможных отказов и аварий.
В данном описании схематично приведены лишь частные варианты реализации предложенного ограничителя нагрузки стрелового крана. Изобретение охватывает другие возможные варианты его исполнения и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
Изобретение относится к ограничителю нагрузки стрелового крана, предназначенному для использования в приборах и системах защиты от перегрузки грузоподъемных кранов со съемным или передвижным противовесом. Ограничитель содержит датчики, которые установлены на кране и выполнены с возможностью измерения параметров, характеризующих нагрузку, пространственное положение стрелы крана и/или грузозахватного органа и пространственное положение противовеса. Ограничитель содержит исполнительное устройство и соединенный с ним цифровой вычислитель. Цифровой вычислитель выполнен с возможностью приема и обработки выходных сигналов датчиков и определения текущего значения нагрузки крана, сравнения текущего значения нагрузки с максимально допустимой нагрузкой, предварительно записанной в запоминающее устройство ограничителя, а также с возможностью формирования предупредительного сигнала и/или передачи на исполнительное устройство сигнала блокировки движения крана, направленного на предотвращение его перегрузки. Ограничитель содержит датчик пространственного положения противовеса, выполненного в виде датчика наличия и/или пространственного положения одного или нескольких грузов съемного или передвигаемого противовеса на противовесной консоли или на поворотной платформе крана. Цифровой вычислитель ограничителя выполнен с возможностью формирования дополнительно предупредительного сигнала об отсутствии и/или пространственном положении груза или грузов противовеса, снижающим грузовую устойчивость крана, и/или формирования рекомендаций оператору крана о необходимости или целесообразности изменения пространственного положения груза или грузов противовеса, и/или формирования сигналов автоматического управления приводом перемещения груза или грузов противовеса из условия обеспечения безопасности работы крана. Достигается повышение безопасности и эффективности работы стрелового крана. 13 з.п. ф-лы, 1 ил.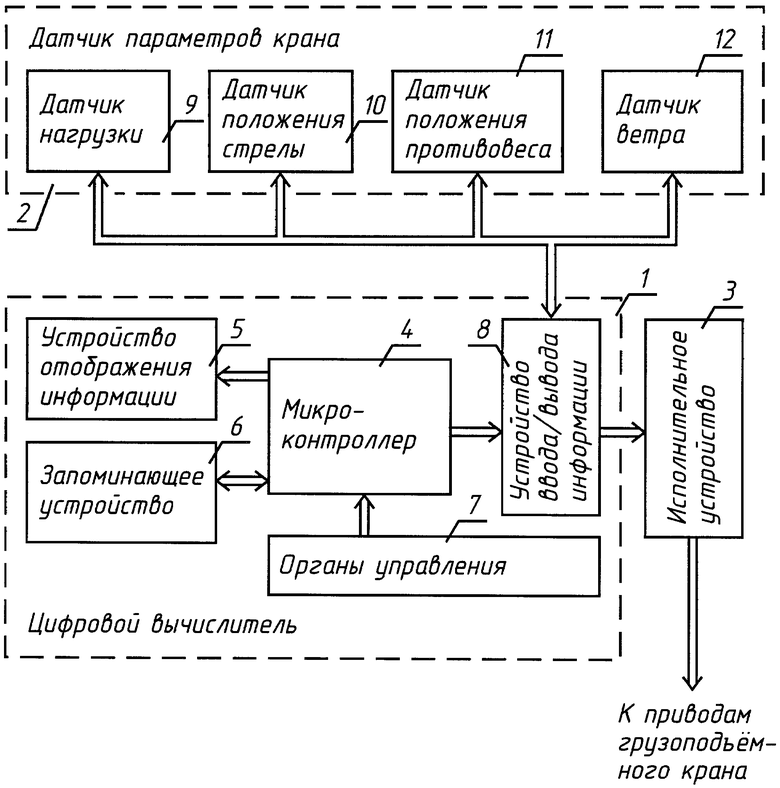
1. Ограничитель нагрузки стрелового крана, содержащий датчики, установленные на кране и выполненные с возможностью измерения параметров, характеризующих нагрузку, пространственное положение его стрелы и/или грузозахватного органа и пространственное положение противовеса, исполнительное устройство и соединенный с ним цифровой вычислитель, выполненный с возможностью приема и обработки выходных сигналов датчиков и определения текущего значения нагрузки крана, сравнения текущего значения нагрузки с максимально допустимой нагрузкой, предварительно записанной в его запоминающее устройство, а также с возможностью формирования предупредительного сигнала и/или передачи на исполнительное устройство сигнала блокирования движений крана, направленного на предотвращения его перегрузки, отличающийся тем, что датчик пространственного положения противовеса выполнен в виде датчика наличия и/или пространственного положения одного или нескольких грузов съемного или передвигаемого противовеса на противовесной консоли или на поворотной платформе крана, а цифровой вычислитель выполнен с возможностью формирования дополнительного предупредительного сигнала об отсутствии и/или пространственном положении груза или грузов противовеса, снижающем грузовую устойчивость крана, и/или формирования рекомендаций оператору крана о необходимости или целесообразности изменения пространственного положения груза или грузов противовеса, и/или формирования сигналов автоматического управления приводом перемещения груза или грузов противовеса из условия обеспечения безопасности работы крана.
2. Ограничитель по п.1, отличающийся тем, что он дополнительно содержит, по меньшей мере, один дискретный световой, и/или звуковой, и/или символьный, и/или графический индикатор или дисплей, соединенный с цифровым вычислителем или входящий в его состав.
3. Ограничитель по п.1, отличающийся тем, что цифровой вычислитель выполнен с возможностью формирования и передачи на выходное устройство сигналов автоматического управления приводом перемещения противовеса, направленных на увеличение/уменьшение его плеча при выявлении в текущий момент времени увеличения/уменьшения массы груза на грузозахватном органе или грузового момента.
4. Ограничитель по п.1, отличающийся тем, что цифровой вычислитель выполнен с возможностью формирования и передачи на выходное устройство сигналов автоматического управления приводом перемещения противовеса, направленных на увеличение его плеча при выявлении команды оператора по переводу крана в состояние меньшей грузовой устойчивости, например команды на опускание стрелы или поворот крана в сторону меньшей устойчивости.
5. Ограничитель по п.1, отличающийся тем, что цифровой вычислитель выполнен с возможностью формирования и передачи на выходное устройство сигналов автоматического управления приводом перемещения противовеса из условия одновременного достижения собственной и/или грузовой устойчивости крана против опрокидывания и предотвращения столкновений противовеса с препятствием в соответствии с параметрами или координатами этого препятствия, предварительно записанными в память цифрового вычислителя.
6. Ограничитель по одному из пп.1-5, отличающийся тем, что он дополнительно содержит датчик скорости и/или направления ветра, соединенный с цифровым вычислителем, который выполнен с возможностью учета направления и/или величины ветровой нагрузки на кран при указанном формировании предупредительного сигнала, и/или при передаче на исполнительное устройство сигнала блокирования движений крана или перемещения противовеса, и/или при передаче на исполнительное устройство сигнала автоматического управления приводом перемещения противовеса из условия повышения устойчивости крана.
7. Ограничитель по п.1, отличающийся тем, что значения массы груза или каждого груза противовеса предварительно записывают в память цифрового вычислителя и учитывают в программе его работы.
8. Ограничитель по п.1, отличающийся тем, что датчик наличия или пространственного положения, по меньшей мере, одного груза противовеса выполнен с использованием технологии бесконтактной идентификации в виде прикрепленного к грузу транспондера или идентификатора и устройства считывания информации с него.
9. Ограничитель по п.8, отличающийся тем, что транспондер или идентификатор груза выполнен с возможностью хранения и передачи информации о массе этого груза и/или месте его установки, а устройство считывания информации выполнено с возможностью передачи этой информации в цифровой вычислитель, который приспособлен для изменения программы своей работы в соответствии с полученной информацией.
10. Ограничитель по п.1, отличающийся тем, что датчик наличия или пространственного положения одного или нескольких грузов противовеса выполнен в виде бесконтактного ультразвукового, или емкостного, или индуктивного, или оптического, или радиолокационного дальномера.
11. Ограничитель по п.10, отличающийся тем, что дальномер выполнен с пассивным отражателем сигнала или с активным ответчиком.
12. Ограничитель по п.1, отличающийся тем, что датчик наличия или пространственного положения одного или нескольких грузов противовеса выполнен электромеханическим.
13. Ограничитель по п.12, отличающийся тем, что датчик наличия или пространственного положения выполнен в виде концевого выключателя, или набора концевых выключателей, или потенциометра с передаточным устройством, или линейного энкодера, или иного устройства, выполненного с возможностью механического взаимодействия с грузом противовеса.
14. Ограничитель по любому из пп.1-5 или 7-13, отличающийся тем, что цифровой вычислитель выполнен с возможностью выявления перемещения передвижного или дополнительного съемного противовеса в транспортное положение и соответствующего формирования и передачи на исполнительное устройство сигнала ограничения транспортной скорости передвижения грузоподъемного крана.
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| АНТЕННА С РЕГУЛИРУЕМЫМ РАСПРЕДЕЛЕНИЕМ ТОКА | 1946 |
|
SU69051A1 |
| Дефлектор | 1927 |
|
SU9213A1 |
| Методическая нагревательная печь с защитной атмосферой | 1937 |
|
SU54366A1 |

