Область техники, к которой относится изобретение
Настоящее изобретение относится к съемочному устройству, системе камеры, устройству управления и программе.
Уровень техники
Из уровня техники известна система управления камерой, в которой диапазон, который может быть зафиксирован камерой, отображается в виде полного изображения, и направлением обзора камеры управляют с помощью операции, выполняемой над полным изображением. Данная система управления камерой описана, например, в заявке на патент Японии №JP-A-2005-354748. Далее известна система управления камерой, в которой секции, соответствующие заданным секциям, отображаются в виде свернутых изображений, и когда из этих свернутых изображений выбирают требуемое, направление обзора камеры смещается в соответствующую заданную секцию.
Сущность изобретения
Однако в технологии, описанной в заявке на патент Японии №JP-A-2005-354748, поскольку изображение получают путем выполнения функций механического управления, таких как панорамирование, наклон, масштабирование, на стороне терминального устройства камеры, предполагается, что имеются ограничения диапазона изображения, которое может быть получено. Далее, когда предполагается, что цифровые операции панорамирования, наклона, масштабирования и т.д. выполняются для цифрового извлечения требуемой области из полного изображения, затруднительно выполнять цифровые операции панорамирования, наклона, масштабирования и механические операции панорамирования, наклона, масштабирования взаимно эффективным способом.
В свете вышеизложенного желательно предоставить съемочное устройство, систему камеры, устройство управления и программу, которые являются новаторскими и усовершенствованными и которые способны просто и эффективно выполнять цифровые операции панорамирования, наклона, масштабирования и механические операции панорамирования, наклона, масштабирования.
Согласно одному варианту осуществления настоящего изобретения предложено съемочное устройство, которое включает в себя блок получения первой информации, который получает первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного блоком камеры; блок получения второй информации, который получает вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения; блок управления, который управляет механическим перемещением блока камеры на основе первой информации; и блок обработки изображения, который получает изображение первой области из полного изображения, зафиксированного блоком камеры, и который извлекает изображение второй области из первой области на основе второй информации.
С помощью такой конфигурации, когда изменение первой области не задано первой информацией и вторая область изменяется в пределах этой первой области, блок управления фиксирует перемещение блока камеры, и блок обработки изображения извлекает изображение второй области, которое изменяется в пределах первой области.
С помощью такой конфигурации, когда первая область изменяется в диапазоне, который включает в себя вторую область, блок обработки изображения не изменяет положение этой второй области и извлекает изображение второй области в пределах первой области.
С помощью такой конфигурации блок управления управляет перемещением блока камеры на основе первой информации и также, когда вторая область задана так, что она превышает диапазон первой области, блок управления управляет перемещением блока камеры на основе второй информации.
С помощью такой конфигурации, когда вторая область перемещается в соответствии с перемещением блока камеры и расположена за пределами первой области, блок обработки изображения изменяет вторую область так, что вторая область находится в пределах первой области, и извлекает изображение второй области.
С помощью такой конфигурации, когда вторая область изменяется, блок управления управляет перемещением блока камеры так, что взаимное расположение первой области и второй области сохраняется в том же состоянии.
С помощью такой конфигурации, когда первая область изменяется, блок обработки изображения изменяет вторую область так, что взаимное расположение первой области и второй области сохраняется в том же состоянии, и извлекает изображение второй области.
Согласно другому варианту осуществления настоящего изобретения предложена система камеры, в которой терминальное устройство камеры, фиксирующее изображения, и клиентское терминальное устройство, которое управляет терминальным устройством камеры, соединены посредством вычислительной сети. Терминальное устройство камеры включает в себя блок получения первой информации, который получает первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного блоком камеры; блок получения второй информации, который получает вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения; блок управления, который управляет механическим перемещением блока камеры на основе первой информации; и блок обработки изображения, который получает изображение первой области из полного изображения, зафиксированного блоком камеры, и который извлекает изображение второй области из первой области на основе второй информации.
Согласно другому варианту осуществления настоящего изобретения предложено устройство управления, которое включает в себя блок получения первой информации, который получает первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного терминальным устройством камеры; блок получения второй информации, который получает вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения; блок передачи, который передает терминальному устройству камеры информацию, используемую для управления механическим перемещением блока камеры на основе первой информации; и блок обработки изображения, который получает изображение первой области из полного изображения, зафиксированного блоком камеры, и который извлекает изображение второй области из первой области на основе второй информации.
С помощью такой конфигурации устройство управления далее включает в себя блок отображения, который отображает и полное изображение, и неполное изображение, соответствующее изображению второй области.
С помощью такой конфигурации блок передачи передает управляющую информацию для управления перемещением блока камеры на основе первой информации и также для управления перемещением блока камеры на основе второй информации, когда вторая область задана так, что вторая область превышает диапазон первой области.
С помощью такой конфигурации, когда вторая область перемещается в соответствии с перемещением блока камеры и расположена за пределами первой области, блок обработки изображения изменяет вторую область так, что вторая область находится в пределах первой области, и извлекает изображение второй области.
С помощью такой конфигурации, когда вторая область изменяется, блок передачи передает управляющую информацию для управления перемещением блока камеры так, что взаимное расположение первой области и второй области сохраняется в том же состоянии.
С помощью такой конфигурации, когда первая область изменяется, блок обработки изображения изменяет вторую область так, что взаимное расположение первой области и второй области сохраняется в том же состоянии, и извлекает изображение второй области.
Согласно другому варианту осуществления настоящего изобретения предложена программа, которая включает в себя команды, заставляющие компьютер функционировать как блок, который получает первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного блоком камеры; блок, который получает вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения; блок, который управляет механическим перемещением блока камеры на основе первой информации; и блок, который получает изображение первой области из полного изображения, зафиксированного блоком камеры, и извлекает изображение второй области из первой области на основе второй информации.
Согласно другому варианту осуществления настоящего изобретения предложено устройство управления, которое выполняет управление так, что отображается область полного изображения, при этом область полного изображения отображает полное изображение, зафиксированное камерой; и блок управления камерой, который управляет камерой так, что камера фиксирует направление, соответствующее первой области, заданной для полного изображения. Блок управления отображением отображает область неполного изображения, в которой изображение отображается путем увеличения второй области, включенной в первую область, и выполняет управление так, что первая область и вторая область отображаются в разных состояниях отображения на полном изображении.
С помощью такой конфигурации блок управления отображением выполняет управление так, что вторая область является непостоянной, когда вторая область находится в пределах диапазона первой области.
С помощью такой конфигурации, при управлении и изменении второй области, когда предпринимается попытка изменить вторую область так, что вторая область превышает диапазон первой области, блок управления отображением изменяет также первую область и выполняет управление так, что вторая область включена в диапазон первой области. Блок управления камерой выполняет управление так, что фиксируется направление, соответствующее измененной первой области.
Согласно настоящему изобретению возможно просто и эффективно выполнять цифровые операции панорамирования, наклона, масштабирования и механические операции панорамирования, наклона, масштабирования.
Краткое описание чертежей
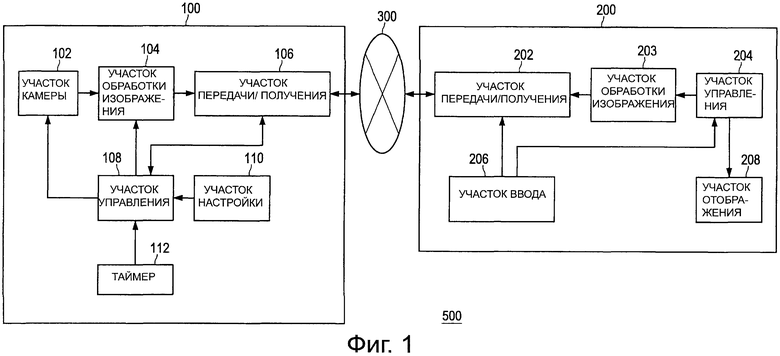
Фиг.1 представляет собой схему, которая показывает общую конфигурацию системы формирования изображения согласно варианту осуществления настоящего изобретения;
Фиг.2 представляет собой схему, которая показывает обработку, выполняемую системой формирования изображения;
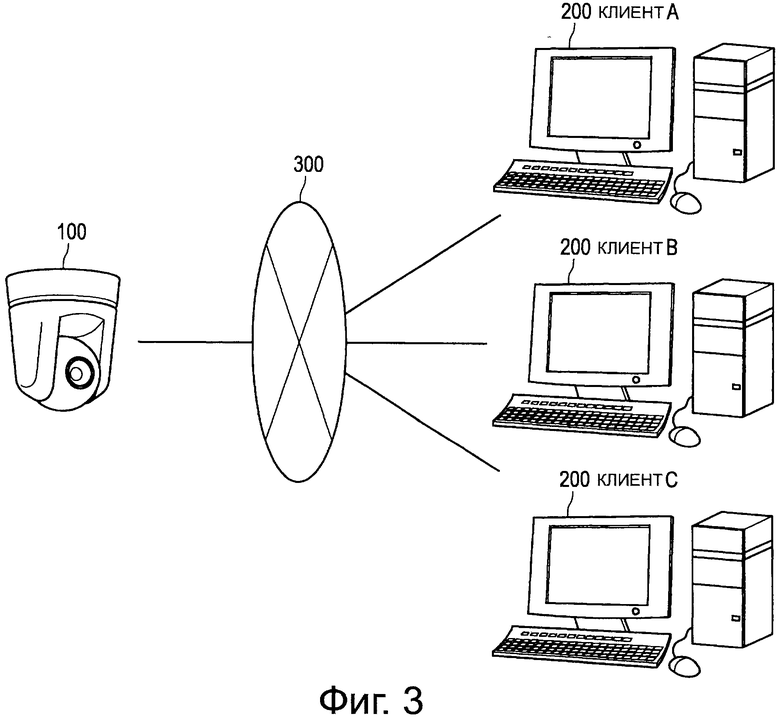
Фиг.3 представляет собой схему, которая показывает состояние, в котором множество клиентских терминалов соединено с вычислительной сетью;
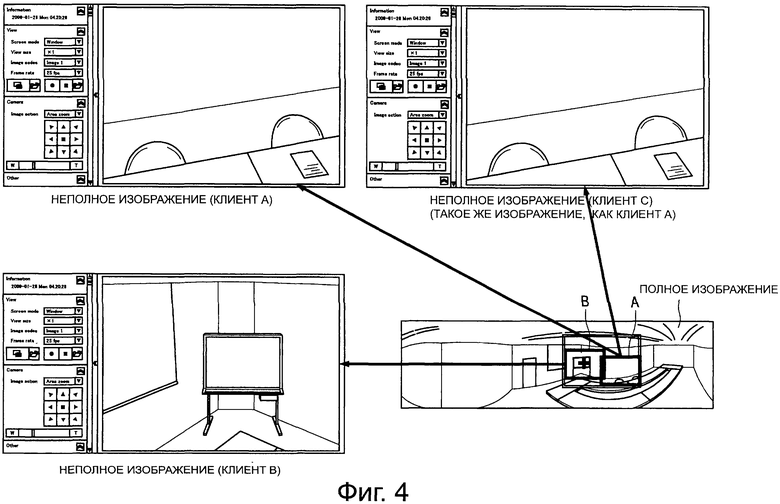
Фиг.4 представляет собой схему, которая показывает экраны дисплеев каждого из клиентских терминалов;
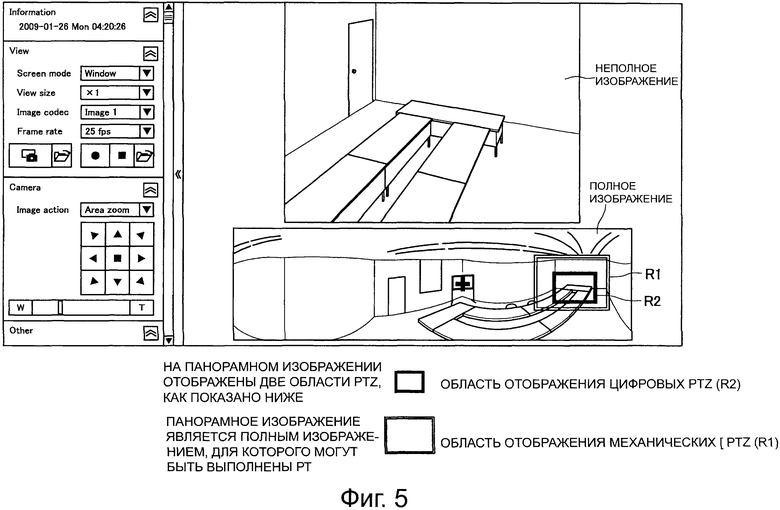
Фиг.5 представляет собой схему, которая показывает полное изображение и неполное изображение, которые показаны на каждом из клиентских терминалов;
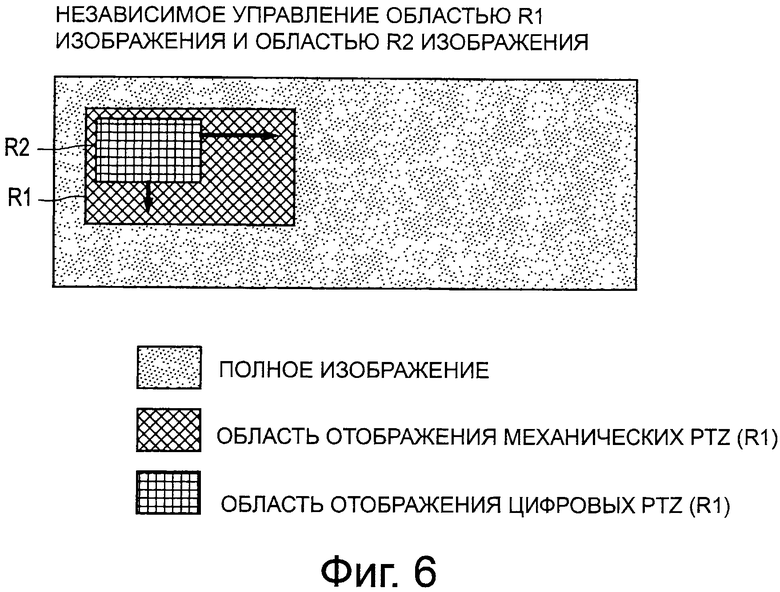
Фиг.6 представляет собой схему, которая показывает способ управления 1 областью R1 изображения и областью R2 изображения;
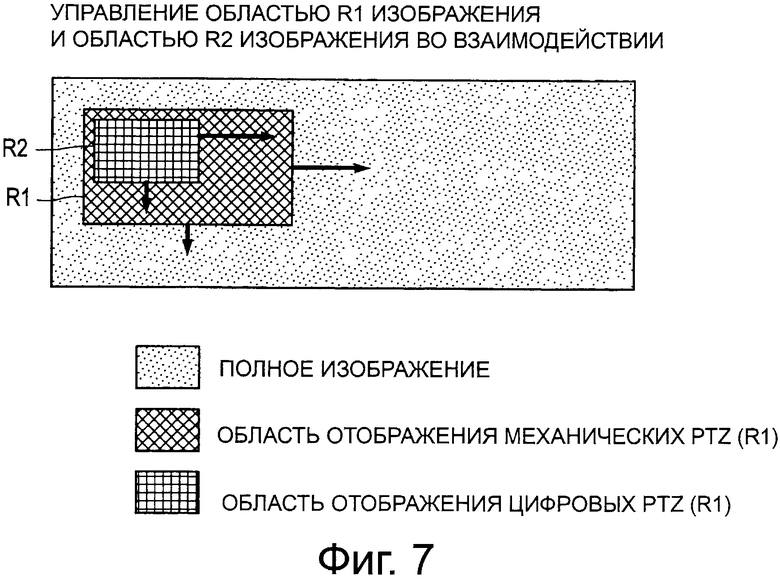
Фиг.7 представляет собой схему, которая показывает способ управления 2 областью R1 изображения и областью R2 изображения;
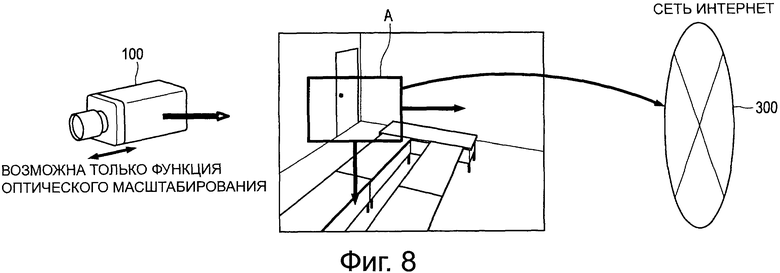
Фиг.8 представляет собой схему, которая показывает конфигурацию в случае, в котором терминальное устройство камеры имеет только механическую функцию масштабирования;
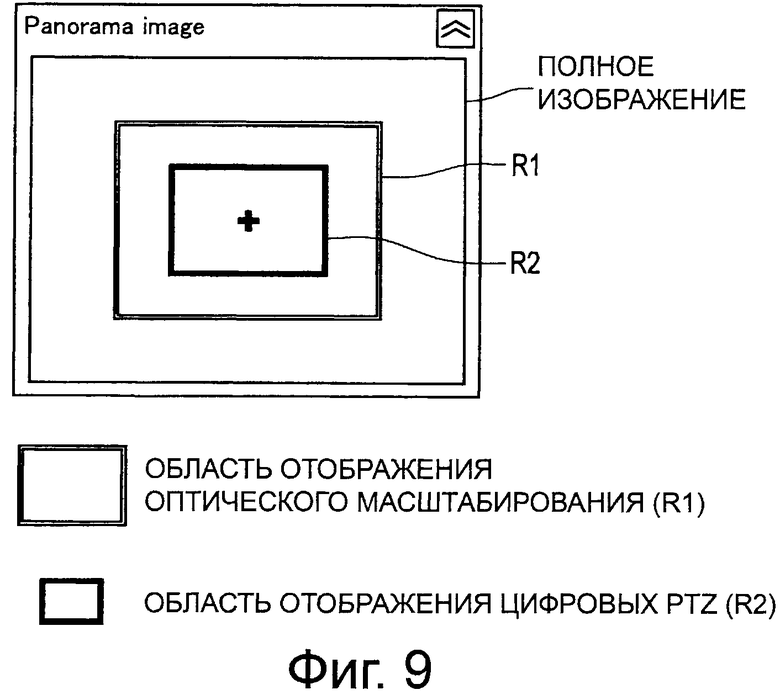
Фиг.9 представляет собой схему, которая показывает полное изображение на каждом из клиентских терминальных устройств;
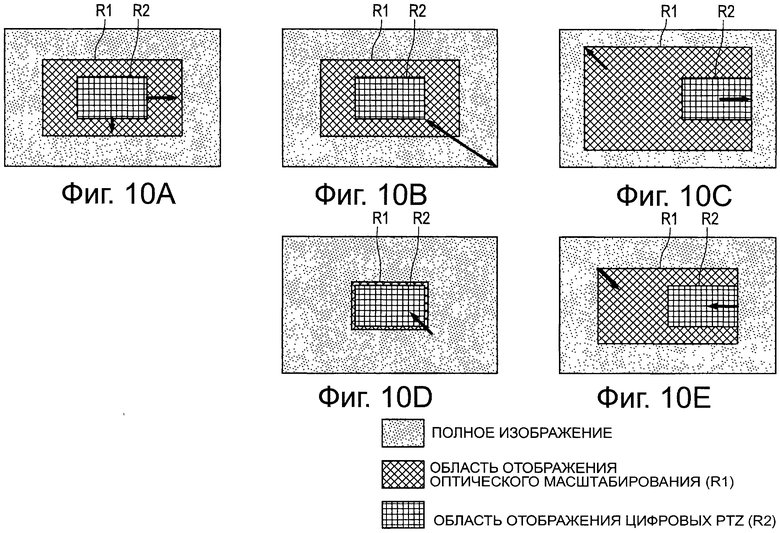
Фиг.10А представляет собой схему, которая показывает способ управления 1 областью R1 изображения и областью R2 изображения согласно второму варианту осуществления;
Фиг.10В представляет собой схему, которая показывает способ управления 1 областью R1 изображения и областью R2 изображения согласно второму варианту осуществления;
Фиг.10С представляет собой схему, которая показывает способ управления 1 областью R1 изображения и областью R2 изображения согласно второму варианту осуществления;
Фиг.10D представляет собой схему, которая показывает способ управления 1 областью R1 изображения и областью R2 изображения согласно второму варианту осуществления;
Фиг.10Е представляет собой схему, которая показывает способ управления 1 областью R1 изображения и областью R2 изображения согласно второму варианту осуществления;
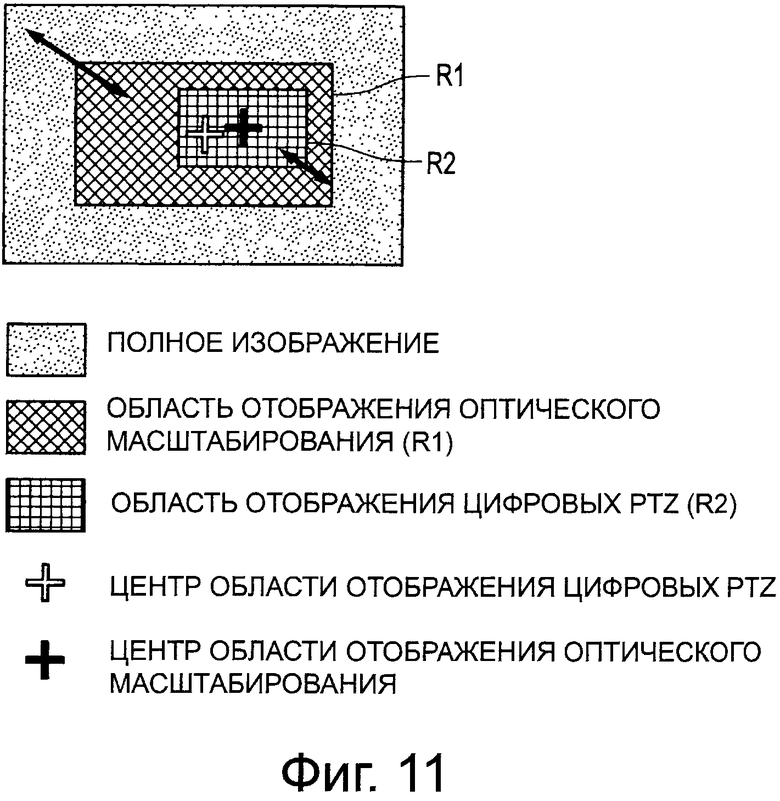
Фиг.11 представляет собой схему, которая показывает способ управления 2 областью R1 изображения и областью R2 изображения согласно второму варианту осуществления;
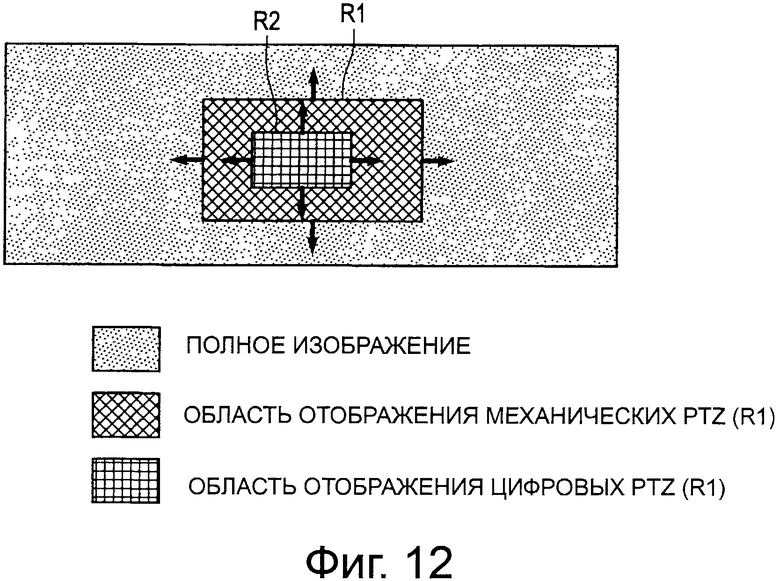
Фиг.12 представляет собой схему, которая показывает случай, в котором один из клиентских терминалов имеет право управления и областью R1 изображения, и областью R2 изображения, а другие клиентские терминалы не имеют права управления;
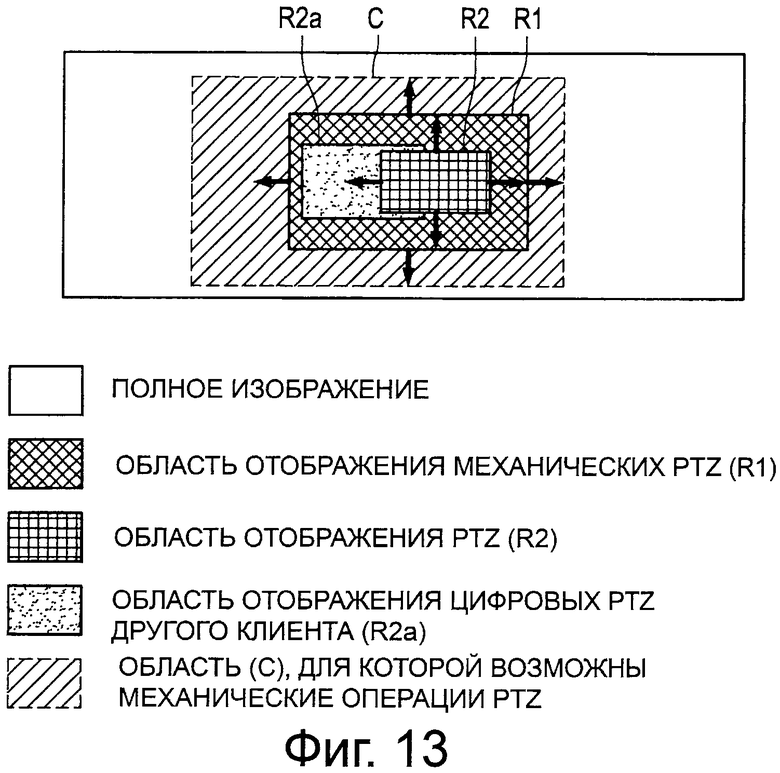
Фиг.13 представляет собой схему, которая показывает случай, в котором один из клиентских терминалов имеет право управления и областью R1 изображения, и областью R2 изображения, а один из других клиентских терминалов имеет право управления цифровыми PTZ;
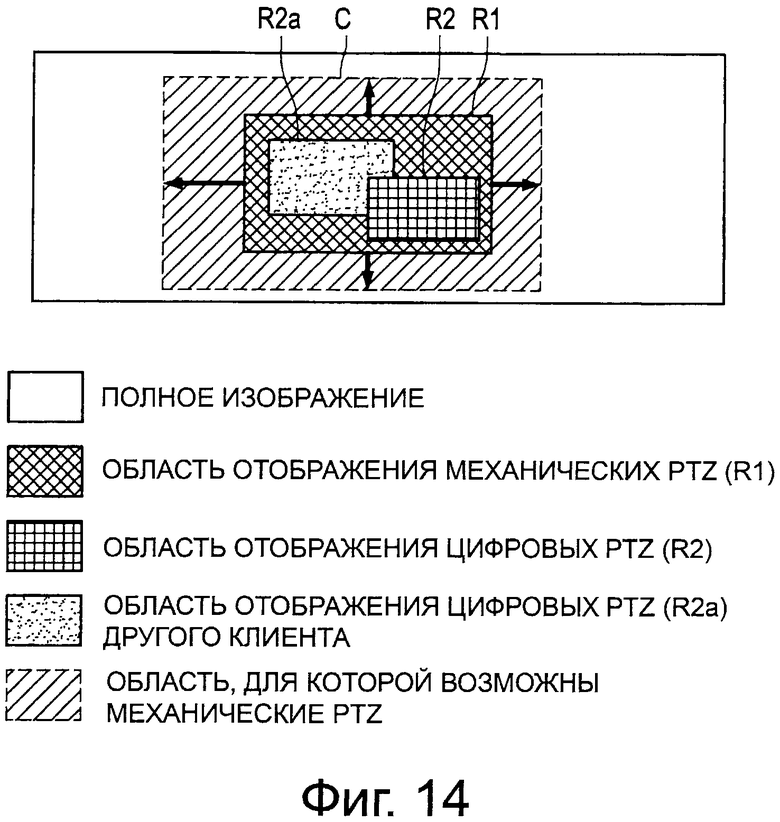
Фиг.14 представляет собой схему, которая показывает случай, в котором клиентский терминал имеет право управления механическими PTZ, а другой клиентский терминал имеет право управления цифровыми PTZ;
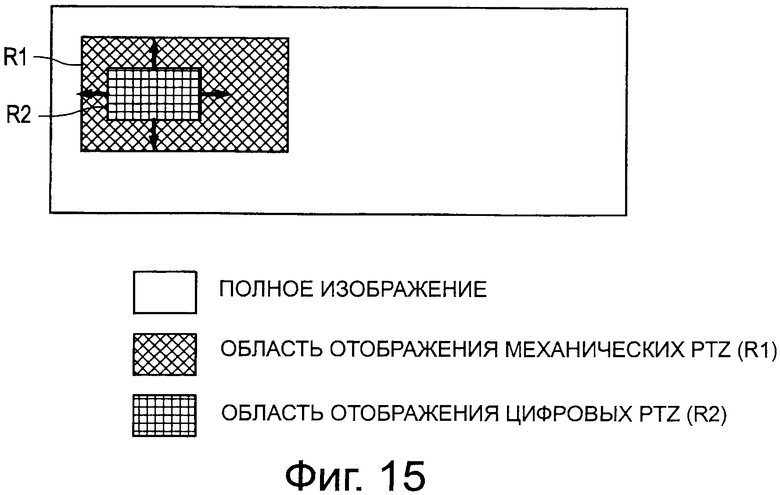
Фиг.15 представляет собой схему, которая показывает случай, в котором клиентский терминал имеет право управления цифровыми PTZ, а другой клиентский терминал имеет право управления механическими PTZ; и
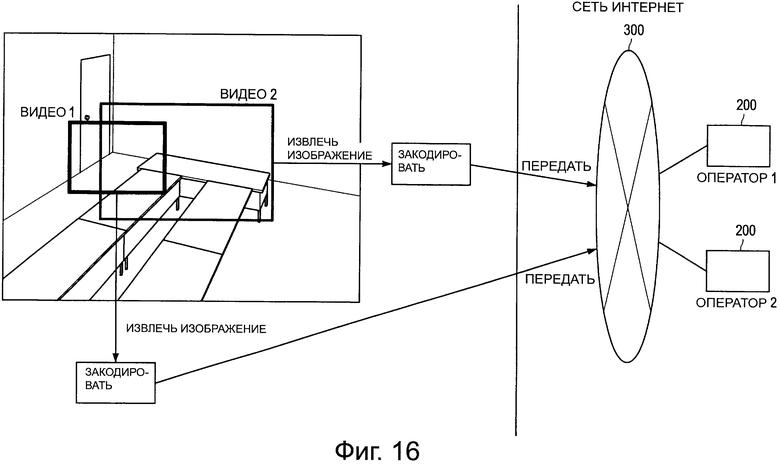
Фиг.16 представляет собой схему, которая показывает состояние, в котором два различных видео, видео 1 и видео 2, соответствующие области R2 изображения, передаются на каждый из клиентских терминалов.
Подробное описание варианта(-ов) осуществления
Далее будут подробно описаны предпочтительные варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. Необходимо принять во внимание, что в данном описании изобретения и прилагаемых чертежах структурные элементы, которые по существу имеют одну и ту же функцию и структуру, обозначены одними и теми же ссылочными позициями, и повторное разъяснение этих структурных элементов опущено.
Необходимо принять во внимание, что описание будет дано в следующем порядке.
1. Первый вариант осуществления
1) Пример конфигурации системы формирования изображения
2) Обработка в настоящем варианте осуществления
3) Способ управления 1
4) Способ управления 2
2. Второй вариант осуществления
1) Обзор второго варианта осуществления
2) Способ управления 1
3) Способ управления 2
3. Третий вариант осуществления
1) Отображение и управление, когда назначают право управления
2) Пример назначения права управления
3) Обработка, относящаяся к назначению права управления
1. Первый вариант осуществления
1) Пример конфигурации системы формирования изображения
Фиг.1 представляет собой схему, которая показывает общую конфигурацию системы 500 формирования изображения согласно варианту осуществления настоящего изобретения. Система 500 формирования изображения включает в себя терминальное устройство 100 камеры (IP камеру) и множество клиентских терминалов 200. Терминальное устройство 100 камеры и каждый из клиентских терминалов 200 соединены посредством вычислительной сети 300, такой как Интернет. При этом сервер 400 соединен с вычислительной сетью 300, и сервер 400 соединен посредством вычислительной сети 300 с терминальным устройством 100 камеры и множеством клиентских терминалов 200.
Терминальное устройство 100 камеры представляет собой, например, камеру наблюдения, которая установлена в помещении или на улице, и терминальное устройство 100 камеры предложено с блоком 102 камеры, который включает в себя линзовую оптическую систему, формирующую изображение объекта, и элемент изображения, преобразующий фотоэлектрическим способом сформированное изображение объекта. Терминальное устройство 100 камеры дополнительно предложено с блоком 104 обработки изображения, блоком 106 передачи/получения, блоком 108 управления, блоком 110 настройки и таймером 112.
Клиентский терминал 200 представляет собой, например, устройство, такое как персональный компьютер (ПК). Клиентский терминал 200 снабжен блоком 202 передачи/получения, блоком 204 управления, блоком 206 ввода и блоком 208 отображения. Необходимо принять во внимание, что каждый из функциональных блоков терминального устройства 100 камеры и клиентского терминала 200, показанных на фиг.1, образован аппаратными средствами (интегральными схемами) или арифметическим процессором, таким как центральный процессор (ЦП), и программными средствами (программой), которая заставляет арифметический процессор функционировать. В последнем случае программа может храниться в памяти, предусмотренной в терминальном устройстве 100 камеры или в клиентском терминале 200, или программа может храниться на носителе информации, таком как внешняя память, который вставляется снаружи. Сервер 400 снабжен функциями обработки изображения, подобными функциям терминального устройства 100 камеры, и сервер 400 может записывать изображения, полученные терминальным устройством 100 камеры. Сервер 400 может также быть снабжен функциями клиентского терминала 200.
Кроме того, функции сервера 400 могут быть объединены с терминальным устройством 100 камеры.
Фиг.2 представляет собой схему, которая показывает обработку, выполненную системой 500 формирования изображения. Здесь в качестве примера терминальное устройство 100 камеры установлено в конференц-зале. Как показано на фиг.2, блок 102 камеры терминального устройства 100 камеры фиксирует в качестве полного изображения относительно широкий диапазон в пределах конференц-зала.
Полное изображение, например, передается на клиентские терминалы 200 в виде данных видеокадра, но настоящее изобретение не ограничено этим примером. Прямая видеосъемка может передаваться на клиентские терминалы 200, и каждый из клиентских терминалов 200, принимающих эту прямую видеосъемку, может извлекать видеокадры. Пользователь может использовать данный клиентский терминал 200 для определения требуемого диапазона из полного изображения. Например, когда область А, показанная на фиг.2, определена клиентским терминалом 200, терминальное устройство 100 камеры кодирует данные прямой видеосъемки области А и передает эти закодированные данные на клиентский терминал 200.
В частности, полное изображение видеокадра (не прямая видеосъемка в данном случае), которое передается заранее из терминального устройства 100 камеры, отображается в блоке 208 отображения клиентского терминала 200 путем обработки, выполняемой блоком 204 управления. Когда пользователь управляет блоком 206 ввода клиентского терминала 200 и определяет выбранную область А из полного изображения, информация области А передается в блок 204 управления. На основе команды блока 204 управления блок 202 передачи/получения клиентского терминала 200 передает информацию области А в терминальное устройство 100 камеры. Далее на основе команды блока 204 управления информация области А (соответствующей области R2 изображения, что будет объяснено позднее) отображается в пределах полного изображения блока 208 отображения.
Когда блок 106 передачи/получения терминального устройства 100 камеры получает посредством вычислительной сети 300 информацию, относящуюся к области А (названной вторая информация в формуле изобретения), он передает эту информацию блоку 108 управления. Блок 108 управления выдает команду блоку 104 обработки изображения извлечь и выполнить обработку кодирования только для части области А изображения (прямая видеосъемка), переданного из блока 102 камеры. Блок 106 передачи/получения получает прямую видеосъемку закодированной области А из блока 104 обработки изображения и передает прямую видеосъемку клиентскому терминалу 200 посредством вычислительной сети 300.
Когда блок 202 передачи/получения клиентского терминала 200 получает прямую видеосъемку области А из терминального устройства 100 камеры, он передает эти данные блоку 203 обработки изображения. В блоке 203 обработки изображения информация области А декодируется, и блок 204 управления проводит обработку для выполнения отображения в блоке 208 отображения. Необходимо принять во внимание, что в данном случае область А соответствует области R2 изображения, что будет объяснено позднее.
Таким образом, пользователь управляет клиентским терминалом 200 и определяет выбранную область из полного изображения, и может таким образом выполнять в цифровой форме операции, которые эквивалентны выполнению механических операций панорамирования, наклона, масштабирования (PTZ). В результате может быть получено видео выбранной области.
В частности, за последние годы увеличена емкость вычислительной сети 300, и, таким образом, возможно передавать видео высокой четкости с более высоким числом пикселей. Однако когда все данные полного изображения посылаются в виде прямой видеосъемки, объем этих данных является огромным. Путем передачи только необходимых данных области, определенной пользователем, как в настоящем варианте осуществления, возможно смотреть видео высокой четкости для выбранной области.
Следует отметить, что извлечение области А с помощью обработки изображения может быть выполнено на стороне клиентского терминала 200. В данном случае блок 203 обработки изображения (который соответствует блоку 104 обработки изображения) предусмотрен в клиентском терминале 200, и терминальное устройство 100 камеры кодирует изображение (прямую видеосъемку), переданное из блока 102 камеры, и передает закодированные данные из блока 106 передачи/получения в вычислительную сеть 300. Когда пользователь управляет блоком 206 ввода клиентского терминала 200 и определяет выбранную область А из полного изображения, блок 204 управления подает команду блоку 203 обработки изображения извлечь область А. Когда блок 202 получения/передачи клиентского терминала 200 получает прямую видеосъемку, он передает данные прямой видеосъемки блоку 203 обработки изображения, и область А извлекается блоком 203 обработки изображения. Изображение извлеченной области А передается из блока 204 управления блоку 208 отображения и отображается в блоке 208 отображения.
Далее в системе настоящего варианта осуществления в дополнение к цифровым операциям панорамирования, наклона, масштабирования могут быть выполнены механические операции панорамирования, наклона, масштабирования. Как показано на фиг.2, терминальное устройство 100 камеры снабжено механическим устройством, которое может изменять направление оптической оси оптической системы формирования изображения в направлениях панорамирования и наклона. Кроме того, терминальное устройство 100 камеры снабжено механическим устройством, которое может перемещать оптическую систему с переменным фокусным расстоянием оптической системы формирования изображения в направлении оптической оси. Данные механические устройства включены в блок 102 камеры, показанный на фиг.2, и образованы приводными механизмами, такими как двигатель и редукторы. Механические операции панорамирования, наклона, масштабирования могут выполняться блоком 102 камеры терминального устройства 100 камеры, которое управляет данными механическими устройствами в соответствии с командами блока 108 управления.
Аналогично вышеописанным цифровым операциям панорамирования, наклона, масштабирования механическими операциями панорамирования, наклона, масштабирования можно управлять со стороны клиентского терминала 200 путем определения области в пределах полного изображения клиентского терминала 200.
В частности, когда пользователь управляет блоком 206 ввода клиентского терминала 200 и определяет выбранную область А из полного изображения, блок 202 передачи/получения клиентского терминала 200 передает информацию (первая информация) области А на терминальное устройство 100 камеры на основе команды блока 204 управления. Более того, на основе команды блока 204 управления информация из области А (соответствующей области R1 изображения, что будет объяснено позднее) отображается в пределах полного изображения в блоке 208 отображения.
Когда блок 106 передачи/получения терминального устройства 100 камеры получает посредством вычислительной сети 300 информацию, относящуюся к области А (первая информация), он передает информацию блоку 108 управления. На основе информации области А блок 108 управления выдает команду для позиций панорамирования, наклона, масштабирования блока 102 камеры блоку 102 камеры. В это время блок 108 управления может выдать команду для позиций панорамирования, наклона, масштабирования в соответствии с положением области А в пределах полного изображения и в соответствии с размером области А. Блок 102 камеры управляет механическими позициями панорамирования, наклона, масштабирования на основе информации области А. Необходимо принять во внимание, что в данном случае область А соответствует области R1 изображения, что будет объяснено позднее.
Фиг.3 представляет собой схему, которая показывает состояние, в котором множество клиентских терминалов 200 соединено с вычислительной сетью 300. Каждый из клиентских терминалов 200, показанных на фиг.3, может выполнять и механические операции PTZ, и цифровые операции PTZ путем определения выбранной области из полного изображения. Следует отметить, что в данном случае предполагается, что команды от каждого из клиентских терминалов 200 вступают в противоречие, и эта ситуация будет описана более подробно в третьем варианте осуществления.
2) Обработка в настоящем варианте осуществления
Далее будет объяснена обработка согласно настоящему варианту осуществления. Фиг.4 представляет собой схему, которая показывает экраны дисплея каждого из клиентских терминалов 200. Вышеописанные полное изображение и неполное изображение - оба отображаются на каждом из клиентских терминалов 200. На фиг.4 общее полное изображение отображается на всех клиентских терминалах 200, а индивидуальное неполное изображение отображается на каждом из клиентских терминалов 200.
Полное изображение представляет собой широкодиапазонное изображение, зафиксированное заблаговременно терминальным устройством 100 камеры, и представляет собой, например, панорамное изображение, зафиксированное в самом широком диапазоне, для которого возможно выполнение механических операций панорамирования, наклона, масштабирования терминальным устройством 100 камеры. Полное изображение может быть получено, например, путем выполнения механических операций PTZ терминального устройства 100 камеры для фиксирования множества изображений с различными направлениями оптической оси и соединения этого множества изображений.
С другой стороны, каждое из неполных изображений представляет собой изображение отдельного диапазона, которое определено из полного изображения пользователем каждого из клиентских терминалов 200, и возможен выбор другого диапазона для каждого из клиентских терминалов 200. Фиг.4 представляет собой схему, которая показывает положение, в котором полное изображение и неполные изображения показаны на каждом из терминалов клиентов А, В и С, соответствующих каждому из клиентских терминалов 200. В примере на фиг.4 неполное изображение, соответствующее области А полного изображения, отображается на терминале клиента А, а неполное изображение, соответствующее области В полного изображения, отображается на терминале клиента В. Аналогично клиенту А неполное изображение, соответствующее области А полного изображения, отображается на терминале клиента С.
И полное изображение, и неполное изображение отображаются в блоке 208 отображения каждого из терминалов клиентов. В примере, показанном на фиг.4, неполное изображение клиента А и полное изображение отображаются на терминале клиента А, а неполные изображения других клиентов не отображаются. Однако, в случае использования администратором или т.п., неполные изображения других клиентов могут отображаться на терминале клиента А. Далее, как будет описано позднее, возможно отобразить области, соответствующие неполным изображениям других клиентов в пределах полного изображения, отображенного на терминале клиента А. Таким образом, на терминале клиента А могут быть обнаружены области неполных изображений других клиентов.
Фиг.5 представляет собой схему, которая показывает полное изображение и неполное изображение, отображенные на каждом из клиентских терминалов 200. Как показано на фиг.5, и область R1 изображения, образованная механическими PTZ, и область R2 изображения, образованная цифровыми PTZ, отображаются на полном изображении, отображенном на каждом из клиентских терминалов 200. Область R1 изображения, образованная механическими PTZ, указывает область изображения, образованную механическим перемещением терминального устройства 100 камеры, и указывает область изображения в положении, в котором цифровые операции PTZ не выполняются. Другими словами, область R1 изображения, образованная механическими PTZ, соответствует области изображения, которая выводится, когда позиции панорамирования, наклона, масштабирования в соответствии с механической обработкой терминальным устройством 100 камеры являются неизменными. Таким образом, когда механические позиции панорамирования, наклона, масштабирования терминального устройства 100 камеры изменяются, диапазон области изображения R1, образованной механическими PTZ, изменяется.
Как описано выше со ссылкой на фиг.3, в системе настоящего варианта осуществления множество клиентских терминалов 200 соединено с одним терминальным устройством 100 камеры. Следовательно, область R1 изображения, образованная механическими PTZ, соответствует механическим позициям панорамирования, наклона, масштабирования одного терминального устройства 100 камеры и имеет такой же диапазон на каждом из клиентских терминалов 200. Таким образом, одинаковая область R1 изображения отображается в пределах полного изображения, отображенного на каждом из клиентских терминалов 200.
С другой стороны, область R2 изображения, образованная цифровыми PTZ, соответствует области изображения, которая представляет собой секцию, извлекаемую цифровыми операциями из области R1 изображения, образованной механическими PTZ. В результате, в основном, область R2 изображения, образованная цифровыми PTZ, представляет собой более узкий диапазон, чем область R1 изображения, образованная механическими PTZ. Когда область R2 изображения, образованная цифровыми PTZ, задана в пределах области R1 изображения, образованной механическими PTZ, область R2 изображения извлекают из области R1 изображения и отображают путем обработки изображения, выполненной терминальным устройством 100 камеры или клиентским терминалом 200. Неполные изображения, показанные на фиг.4 и фиг.5, соответствуют области R2 изображения, образованной цифровыми PTZ, которую извлекают в соответствии с определением пользователем, из области R1 изображения, образованной механическими PTZ. Блок 204 управления клиентского терминала 200 может выполнять управление для осуществления отображения в блоке 208 отображения так, что состояния отображения области R1 изображения и области R2 изображения различны. Например, отображение может быть выполнено так, что внешние очертания области R1 изображения и области R2 изображения имеют разный цвет. Таким образом, пользователь может визуально различать область R1 изображения и область R2 изображения.
Как показано на фиг.5, в пределах полного изображения, отображенного на каждом из клиентских терминалов 200, вместе с областью R1 изображения, которая является общей для всех клиентских терминалов 200 и которая образована механическими PTZ, также отображается область R2 изображения, которая образуется цифровыми PTZ и задается в пределах области R1 изображения. Путем управления блоком 206 ввода (который представляет собой мышь, клавиатуру или т.п.) клиентского терминала 200 пользователь может задавать область R1 изображения и область R2 изображения из полного изображения и может изменять область R1 изображения и область R2 изображения на выбранный диапазон. Далее более подробно будут объяснены определение и изменение области R1 изображения и области R2 изображения.
3) Способ управления 1
Фиг.6 представляет собой схему, которая показывает способ управления 1 областью R1 изображения и областью R2 изображения. В способе управления 1, для того чтобы задать область R1 изображения и область R2 изображения, выполняются по отдельности два типа PTZ операций. Далее будет объяснен случай, в котором пользователь выполняет операции PTZ путем управления мышью.
В случае, в котором пользователь задает область R2 изображения и выполняет цифровые PTZ операции, когда управление областью R2 изображения выполняется в пределах области отображения области R1 изображения, операции, которые изменяют область R2 изображения, выполняются, пока область R1 изображения остается в неизменном состоянии. Когда пользователь задает область R2 изображения в пределах диапазона области R1 изображения, область R1 изображения не изменяется, и механические позиции PTZ терминального устройства 100 камеры не изменяются. Таким образом, когда пользователь выбирает область R2 изображения в пределах диапазона области R1 изображения, область R2 изображения, заданная из области R1 изображения путем обработки изображения, извлекается и отображается в виде неполного изображения без выполнения механических операций. В таком случае, когда область R1 изображения не изменяется, даже если другой пользователь, такой как клиент В, показанный на фиг.4, отображает в виде неполного изображения изображение области R2 другого изображения, этот другой пользователь может продолжать без проблем видеть неполное изображение.
Кроме того, когда пользователь задает область R1 изображения и выполняет операции PTZ, пока область отображения области R2 изображения находится в пределах диапазона изображения, цифровые операции РТ определены, и механические операции РТ выполняются для изменения области R1 изображения.
Далее в случае, в котором пользователь задает область R2 изображения и выполняет цифровые операции РТ, когда панорамирование и наклон выполняются за пределами области отображения механических операций РТ, т.е. когда пользователь пытается расширить определение области R2 изображения за пределы диапазона области R1 изображения, механические операции РТ выполняются совместно с цифровыми операциями РТ, и область R1 изображения обусловлена изменением так, что область R2 изображения находится в пределах области R1 изображения. Таким образом, когда пользователь управляет областью R2 изображения и выполняет операции PTZ за пределами области отображения области R1 изображения, задают изображение за пределами диапазона области R1 изображения, и таким образом выполняются операции для изменения механических позиций PTZ терминального устройства 100 камеры.
При этом, как отдельный пример, когда управляют областью R2 изображения, операции РТ области R1 изображения могут быть выполнены вне зависимости от того, находится область R2 изображения в пределах области R1 изображения или нет.
Кроме того, в случае, в котором пользователь задает область R1 изображения и выполняет механические операции РТ, когда область R2 изображения, образованная цифровыми РТ, находится за пределами области отображения области R1 изображения, цифровые операции РТ выполняются совместно с механическими операциями РТ, таким образом обуславливая изменение области R2 изображения так, что область R2 изображения находится в пределах области R1 изображения.
С помощью вышеописанных операций пользователь может выполнять механические операции РТ или цифровые операции РТ путем определения соответственно области R1 изображения и области R2 изображения. При этом, в случае, в котором управление одной из областей, областью R1 изображения или областью R2 изображения, затрудняет отображение другой области изображения, путем совместного изменения этой другой области изображения возможно постоянно задать область R2 изображения в пределах области R1 изображения.
Определение и изменение области R1 изображения и области R2 изображения достигается пользователем с помощью мыши для выполнения операций выбора и перетаскивания на полном изображении. Например, в положении, в котором выбрана область R1 изображения (или область R2 изображения), выполняя щелчок мышью на выбранной точке в пределах полного изображения, пользователь может переместить центр области R1 изображения (или области R2 изображения) на позицию этой отмеченной точки. И наоборот, в положении, в котором выбрана область R1 изображения (или область R2 изображения), пользователь может выполнять операцию перетаскивания, чтобы заставить область R1 изображения (или область R2 изображения) переместиться на выбранную позицию.
При этом, когда выбранная точка отмечена на полном изображении, если отмеченная точка находится в пределах области R1 изображения, центр области R2 изображения (цифровые РТ) может совпадать с отмеченной позицией, в то время как область R1 изображения (механические РТ) является неизменной. Если эта отмеченная позиция находится за пределами области отображения области R1 изображения, и механические, и цифровые операции могут быть выполнены так, что центры и механических, и цифровых областей отображения будут совпадать с отмеченной позицией.
В этом случае центр области R2 изображения, образованной цифровыми РТ, совпадает с отмеченной позицией, в то время как центр области R1 изображения, образованной механическими РТ, не обязательно является отмеченной позицией. И наоборот, механические РТ могут быть выполнены так, что область R2 изображения точно вмещается в область R1 изображения. Таким образом, возможно свести к минимуму величину управления механическими РТ.
В том, что касается операций масштабирования, в основном, когда заданы механические или цифровые операции масштабирования (когда задана область R1 изображения или область R2 изображения), управление масштабированием выполняется только для масштабирования на заданной стороне подобно вышеописанным операциям РТ.
Далее, если механические или цифровые операции масштабирования не заданы, когда издана команда для выполнения операций масштабирования, сначала выполняется механическое масштабирование в пределах диапазона, в котором возможно механическое масштабирование, таким образом изменяя область R1 изображения. Так изображения и в пределах области R1 изображения, и в пределах области R2 изображения увеличиваются, и диапазон, соответствующий области R2 изображения, отображается в виде неполного изображения. Далее, когда механическое масштабирование достигло максимума в направлении фотографического телеобъектива (увеличение масштаба) (когда механическое масштабирование достигло крайнего положения фотографического телеобъектива), для дальнейшего увеличения диапазона области R2 изображения выполняется обработка с помощью цифрового масштабирования.
В способе управления 1, когда область R2 изображения задана и область R2 изображения перемещается, тогда как область R1 изображения перемещается только на минимальный диапазон, нагрузка на другой клиентский терминал 200 может быть минимизирована, если другой клиентский терминал 200 выполняет цифровые операции PTZ.
4) Способ управления 2
Фиг.7 представляет собой схему, которая показывает способ управления 2 области R1 изображения и области R2 изображения. В способе управления 2 механическими операциями PTZ и цифровыми операциями PTZ необходимо управлять во взаимодействии друг с другом. На фиг.7 даже в случае, в котором задана одна из областей - область R1 изображения (механические РТ) или область R2 изображения (цифровые РТ) - и эта область перемещается, взаимное расположение области R1 изображения и области R2 изображения сохраняется в том же состоянии, и область R1 изображения и область R2 изображения перемещаются параллельно.
Например, в состоянии, в котором выбрана область R1 изображения (или область R2 изображения), если пользователь отмечает выбранную точку на полном изображении, возможно переместить центр области R2 изображения на отмеченную точку при сохранении взаимного расположения области R1 изображения и области R2 изображения в том же состоянии.
Далее при выполнении также операции масштабирования, если задана одна из областей - область R1 изображения (механические РТ) или область R2 изображения (цифровые РТ) - и эта область перемещается, операция масштабирования выполняется так, что соотношение масштабов области R1 изображения и области R2 изображения является постоянным.
В способе управления 2, когда терминальное устройство 100 камеры отслеживает и фиксирует заданный объект, по мере того как область R1 изображения и область R2 изображения сдвигаются, отслеживаемый объект можно надежно отслеживать в пределах области R1 изображения. При этом, даже если отслеживаемый объект временно перемещается за пределы области R2 изображения, по мере того как область R1 изображения сдвигается с областью R2 изображения, путем постоянной записи области R1 изображения, возможно последовательно получить объект, который не может быть отслежен.
Как описано выше, согласно первому варианту осуществления возможно для клиентского терминала 200 задать механическую операцию масштабирования и цифровую операцию масштабирования и выполнить выбранное управление. В результате в системе, в которой возможны механические и цифровые операции масштабирования, возможно получить изображение требуемого диапазона. 2. Второй вариант осуществления
1) Обзор второго варианта осуществления
Далее будет объяснен второй вариант осуществления настоящего изобретения. Во втором варианте осуществления терминальное устройство 100 камеры не имеет механических функций панорамирования и наклона и имеет только механическую функцию масштабирования (оптического масштабирования). Фиг.8 представляет собой схему, которая показывает конфигурацию терминального устройства 100 камеры, когда терминальное устройство 100 камеры имеет только механическую функцию масштабирования.
Как показано на фиг.8, цифровые операции PTZ выполняются в пределах видео, которое получают объективом камеры терминального устройства 100 камеры. В данном случае в соответствии с командой со стороны клиентского терминала 200 часть видео (область А, показанная на фиг.8), полученная с объектива камеры терминального устройства 100 камеры, извлекают и передают на клиентский терминал 200. Следует отметить, что при передаче видео также возможно, что все видео, полученные с объектива камеры, передают на клиентский терминал 200, и область А извлекают из всего видео и отображают получающей стороной клиентского терминала 200.
Фиг.9 представляет собой схему, которая показывает полное изображение на каждом из клиентских терминалов 200. Аналогично первому варианту осуществления вместе с областью R1 изображения, образованной механическим Z, область R2 изображения, которая задана в пределах области R1 изображения и которая образована цифровыми PTZ, также отображается в пределах полного изображения. Во втором варианте осуществления механические операции панорамирования и наклона не могут выполняться, и таким образом область R1 изображения, образованная механическими PTZ, постоянно отображается в центре полного изображения. Следует отметить, что на фиг.9 показано только полное изображение, но аналогично фиг.5, и полное изображение, и неполное изображение оба отображаются в блоке 208 отображения каждого из клиентских терминалов 200.
2) Способ управления 1
Фиг.10А-10Е представляют собой схемы, которые показывают способ управления 1 областью R1 изображения и областью R2 изображения согласно второму варианту осуществления. В способе управления 1 определение области R1 изображения, образованной механической операцией оптического масштабирования, и определение области R2 изображения, образованной цифровыми операциями PTZ, выполняются по отдельности.
Прежде всего, на фиг.10А, если цифровые операции РТ области R2 изображения находятся в пределах области отображения механического масштабирования области R1 изображения, цифровые операции PTZ области R2 изображения выполняются, пока область R1 изображения находится в неизменном состоянии. Далее фиг.10 В показывает определение области R1 изображения, образованной операцией оптического масштабирования. На фиг.10В в диапазоне, в котором область R2 изображения, образованная цифровыми операциями PTZ, включена в область R1 изображения, область R1 изображения может быть изменена механическими операциями РТ в пределах диапазона, обозначенного стрелкой.
Фиг.10С показывает случай, в котором, когда область R2 изображения изменяют цифровыми операциями PTZ, выполняется операция, в которой предпринята попытка продолжить область R2 изображения за пределы области отображения области R1 изображения. В данном случае операция выполняется во взаимодействии, в котором операция оптического масштабирования используется для расширения области R1 изображения так, что область R2 изображения включена в область R1 изображения.
Фиг.10D показывает случай, в котором когда коэффициент отображения области R1 изображения оптического масштабирования становится больше, чем заданное значение по отношению к полному изображению, механическое масштабирование перемещает сторону фотографического телеобъектива в соответствии с областью R2 изображения. В данном случае, когда область R2 изображения перемещается цифровыми операциями РТ в направлении центра полного изображения, оптическое масштабирование выполняется так, что коэффициент отображения приближается к вышеописанному заданному значению за счет оптического масштабирования на стороне фотографического телеобъектива в пределах диапазона, в котором область R2 изображения включена в область R1 изображения. Таким образом, возможно подавление области из области R1 изображения, образованной оптическим масштабированием, которая становится более расширенной, чем необходимо, и таким образом улучшить разрешающую способность.
Фиг.10Е показывает случай, в котором пока областью R1 изображения управляют с помощью операции оптического масштабирования, часть области R2 изображения, образованной цифровыми PTZ, продолжается за пределами области R1 изображения. В данном случае цифровые операции РТ выполняются во взаимодействии так, что область R2 изображения находится в пределах области R1 изображения.
Далее по отношению также к операции масштабирования, даже когда задана одна из областей - область R1 изображения (оптическое масштабирование) или область R2 изображения (цифровое масштабирование) - и эта заданная область перемещается, операция масштабирования выполняется так, что соотношение масштабов области R1 изображения и области R2 изображения сохраняет постоянное значение.
При этом, когда выполняется операция масштабирования, сначала оптическое масштабирование выполняется в пределах диапазона оптического масштабирования. Затем, когда оптическое масштабирование увеличивается до максимума в направлении фотографического телеобъектива, если операция масштабирования далее выполняется в направлении фотографического телеобъектива, выполняется цифровое масштабирование.
3) Способ управления 2
Фиг.11 представляет собой схему, которая показывает способ управления 2 областью R1 изображения и областью R2 изображения согласно второму варианту осуществления. В способе управления 2 оптическое масштабирование и цифровое масштабирование могут быть выполнены во взаимодействии друг с другом. На фиг.11 операция масштабирования выполняется так, что соотношение масштабов области R1 изображения, образованной оптическим масштабированием, и области R2 изображения, образованной цифровым масштабированием, сохраняет постоянное значение.
В данном случае, даже если задано или механическое масштабирование, или цифровое масштабирование, центры области R1 изображения и области R2 изображения являются относительно постоянными, и масштабирование выполняется, пока соотношение масштабов области R1 изображения и области R2 изображения является постоянным.
Как описано выше, согласно второму варианту осуществления, даже когда терминальное устройство 100 камеры не имеет механических функций панорамирования и наклона, возможно получить изображение требуемого диапазона с помощью функции оптического масштабирования терминального устройства 100 камеры и цифровых операций PTZ.
3. Третий вариант осуществления
1) Отображение и управление, когда назначают право управления
Далее будет объяснен третий вариант осуществления настоящего изобретения. Третий вариант осуществления относится к случаю, когда имеет место конфликт между командами от каждого из вышеописанных клиентских терминалов 200, как описано выше. В данном случае в третьем варианте осуществления право управления назначается одному из множества клиентских терминалов 200, и клиентский терминал 200, который имеет право управления, выполняет операции PTZ. Другими словами, в третьем варианте осуществления только клиентский терминал 200, который имеет право управления, исключительно управляет операциями PTZ.
В настоящем варианте осуществления также, аналогично первому и второму вариантам осуществления, могут выполняться и механические операции PTZ, и цифровые операции PTZ. По этой причине в настоящем варианте осуществления право исключительного управления может быть назначено по отношению и к механическим операциям PTZ, и к цифровым операциям PTZ.
В данном случае, когда в системе имеется одно терминальное устройство 100 камеры, право управления механическими операциями PTZ может удерживаться выбранным клиентским терминалом 200. С другой стороны, возможно назначить право управления цифровыми операциями PTZ только выбранному клиентскому терминалу 200 или назначить право управления цифровыми операциями PTZ множеству клиентских терминалов 200. Здесь это будет объяснено более подробно со ссылкой на фиг.12-15.
Фиг.12 показывает случай, в котором один клиентский терминал 200 имеет право управления и областью R1 изображения, и областью R2 изображения, а другой клиентский терминал 200 не имеют права управления. В данном случае, как показано на фиг.12, клиентский терминал 200, который имеет право управления областью R1 изображения и областью R2 изображения, может выполнять и механические операции PTZ, и цифровые операции PTZ и может свободно управлять и областью R1 изображения, и областью R2 изображения. В данном случае возможно свободно управлять областью R1 изображения с помощью механических операций PTZ. Далее возможно свободно управлять регулированием области R2 изображения в области R1 изображения с помощью цифровых операций PTZ.
Здесь, когда область R1 изображения изменяется клиентским терминалом 200, который имеет право управления механическими операциями PTZ, другой клиентский терминал 200 (который не имеет права управления механическими операциями PTZ и имеет право управления только цифровыми операциями PTZ) может управлять областью R2 изображения в пределах измененной области R1 изображения.
Таким образом, когда один клиентский терминал 200 имеет право управления и механическими операциями PTZ, и цифровыми операциями PTZ, область R1 изображения и область R2 изображения можно свободно переместить, как показано на фиг.12.
Фиг.13 показывает случай, в котором один клиентский терминал 200 имеет право управления и областью R1 изображения, и областью R2 изображения, а другой клиентский терминал 200 (в данном случае один из других клиентских терминалов 200) имеет право управления цифровыми операциями PTZ.
В данном случае, если механические операции PTZ не ограничены, другой клиентский терминал 200, который имеет право управления цифровыми операциями PTZ, не может выполнять требуемые цифровые операции PTZ. По этой причине область R2 изображения (показанная в виде области R2a изображения на фиг.13), образованная цифровыми операциями PTZ, право управления которыми имеет другой клиентский терминал 200, отображается на клиентском терминале 200, который имеет право управления механическими операциями PTZ. Затем чтобы обеспечить отображение области R2a изображения на другом клиентском терминале 200, область R2a изображения и область, которая включает область R2a изображения (прямоугольный диапазон С, обозначенный пунктирными линиями на фиг.13), отображаются на клиентском терминале 200, который имеет право управления механическими операциями PTZ, и механические операции PTZ возможны только в пределах диапазона пунктирных линий. За счет введения ограничений управления клиентским терминалом 200, который таким образом имеет право управления механическими операциями PTZ, даже когда выполняются механические операции PTZ, область R2 изображения, образованная цифровыми операциями PTZ, право управления которыми имеет другой клиентский терминал 200, постоянно включена в область R1 изображения, и таким образом другой клиентский терминал 200 может продолжать получать неполное изображение области R2a изображения.
Аналогично фиг.12, в случае, также показанном на фиг.13, на клиентском терминале 200, который имеет право управления механическими операциями PTZ, область R2 изображения может быть задана в пределах области R1 изображения с помощью цифровых операций PTZ и может быть получена в виде неполного изображения. Далее, как показано на фиг.13, имеется случай, в котором один клиентский терминал имеет право управления областями R1 и R2 изображения, а другой клиентский терминал 200 имеет право управления областью R2 изображения, при этом оба клиентских терминала 200, таким образом, имеют право управления областью R2 изображения. В данном случае возможно свободное управление на стороне одного клиентского терминала 200, независимо от того, имеет клиентский терминал 200 право управления областью R2 изображения или нет. Таким образом, например, когда необходимо срочно посмотреть видео определенного места, в то время как право управления имеет другой клиентский терминал 200, есть вероятность избежать невозможности выполнения механических операций PTZ в той области.
Следует отметить, что поскольку обычно нет необходимости в отображении области R2a изображения и диапазона С, обозначенного пунктирными линиями, также возможно, что область R2a изображения и диапазон С отображаются на клиентском терминале 200, который имеет право управления механическими операциями PTZ, только когда пользователь выполняет операции PTZ.
Далее, поскольку область R1 изображения не может быть сделана большей, чем диапазон прямоугольного диапазона С, область за пределами диапазона С становится областью, для которой не назначено управление. По этой причине, как показано на фиг.13, область за пределами диапазона С отображается белым цветом (как вариант, это может быть отображение серым цветом или т.п.), так что можно зрительно распознать область, которой не назначено право управления.
Фиг.14 показывает случай, в котором клиентский терминал 200 имеет право управления механическими операциями PTZ, а другой клиентский терминал 200 имеет право управления цифровыми операциями PTZ. В данном случае диапазон, в котором могут быть выполнены механические операции PTZ, представляет собой диапазон (прямоугольный диапазон С, обозначенный пунктирной линией на фиг.14), который включает область R2 изображения (обозначенную как область R2a изображения на фиг.14), для которой право управления цифровыми операциями PTZ принадлежит другому клиентскому терминалу 200.
В примере, показанном также на фиг.14, поскольку обычно не обязательно отображать область R2a изображения и диапазон С, обозначенный пунктирной линией, также возможно, что область R2a изображения и диапазон С отображаются на другом клиентском терминале 200, который имеет право управления механическими операциями PTZ, только когда пользователь выполняет операции PTZ.
Далее в примере, также показанном на фиг.14, область за пределами диапазона С отображается белым цветом (как вариант, это может быть отображение серым цветом или т.п.), так что можно зрительно распознать область, которой не назначено право управления.
Фиг.15 показывает случай, в котором клиентский терминал 200 имеет право управления цифровыми операциями PTZ, а другой клиентский терминал 200 имеет право управления механическими операциями PTZ. В данном случае диапазон, в котором возможно управление областью R2 изображения, образованной цифровыми операциями PTZ, находится в пределах диапазона механических PTZ (область R1 изображения), который задан другим клиентским терминалом 200. Область R1 изображения изменяется путем управления со стороны клиентского терминала 200, который имеет право управления механическими операциями PTZ. Следует отметить, что когда другой клиентский терминал 200 имеет право управления механическими операциями PTZ, изображение области R1 изображения можно смотреть на более позднем этапе, например, путем записи изображения (изображение отдельно от области R2 изображения), которое не может быть заблаговременно отображено в виде прямой видеосъемки в области неполного изображения на сервере.
2) Пример назначения права управления
Как описано выше, с учетом области R2 изображения, образованной цифровыми операциями PTZ, путем передачи множества потоков изображения из терминального устройства 100 камеры посредством вычислительной сети 300, множество разных клиентских терминалов 200 может получать видео разных областей R2 изображения. Фиг.16 представляет собой схему, показывающую состояние, в котором два разных видео (видео 1 и видео 2), соответствующие области R2 изображения, передаются на каждый из клиентских терминалов 200. Здесь предполагается, например, что видео 1 соответствует области R2 изображения, показанной на фиг.13, а видео 2 соответствует области R2a изображения, показанной на фиг.13.
Как показано на фиг.16, при возможности управления двумя видео (видео 1 и видео 2), если доступно управление или видео 1, или видео 2, доступное право управления видео назначается следующему клиентскому терминалу 200, который вступает к управлению видео.
Например, когда доступно право управления и видео 1, и видео 2, первый вступивший клиентский терминал 200 (здесь оператор 1) может получить право управления одним из видео - видео 1 или видео 2. Здесь предполагается, что оператор 1 получает право управления видео 1 и управляет видео 1. За время, в течение которого оператор 1 удерживает право управления видео 1, в соответствии с вышеописанной обработкой, оператор 1 может свободно управлять диапазоном видео 1 и может получить прямую видеосъемку требуемой области.
Далее в состоянии, в котором оператор 1 удерживает право управления видео 1, недавно вступивший клиентский терминал 200 (здесь оператор 2) получает право управления видео 2, так как доступно право управления видео 2. Таким образом, за время, в течение которого оператор 2 удерживает право управления видео 2, оператор 2 может свободно управлять диапазоном видео 2 и может получить прямую видеосъемку требуемой области. Следует отметить, что когда право управления видео 1 недоступно, даже если доступно право управления видео 2, также возможно подождать, пока право управления видео 1 не станет доступным.
Далее в состоянии, в котором оператор 1 удерживает право управления видео 1, а оператор 2 удерживает право управления видео 2, следующий вступающий клиентский терминал 200 (здесь, оператор 3) не может получить право управления, так как право управления и видео 1, и видео 2 удерживается оператором 1 и оператором 2. По этой причине оператор 3 находится в состоянии готовности, пока право управления видео 1 или видео 2 не станет доступным. Касательно терминала клиента С, показанного на фиг.4, находясь в состоянии готовности, клиентский терминал 200 обычно видит то же видео, что и другой клиентский терминал 200, который обладает управлением, такой как терминал клиента А. При этом, когда после этого вступает оператор 4, управление получают по порядку от клиентского терминала 200, вступающего в более раннее время, когда управление становится доступным.
Время, в течение которого удерживается право управления, может быть установлено, например, заранее. Таймер 112 терминального устройства 100 камеры подсчитывает время, в течение которого каждый из операторов соответственно удерживает право управления, и когда период времени, который установлен заранее, истекает, право управления оператора аннулируется. Приведем в качестве примера, когда период времени для удержания права управления составляет 15 минут; в вышеописанном примере, когда с момента получения оператором 1 права управления видео 1 истекает 15 минут, право управления видео 1 оператором 1 аннулируется. В результате оператор 3, который находится в состоянии готовности, имеет возможность получить право управления видео 1 и управлять видео 1. Далее, с момента получения оператором 2 права управления видео 2 истекает 15 минут, право управления видео 2 оператором 2 аннулируется. В результате оператор 4, который находится в состоянии готовности, имеет возможность получить право управления видео 2 и управлять видео 2.
Подобная процедура может быть выполнена, когда право управления назначается также с учетом механической области R1 изображения. Однако, следует отметить, что поскольку в системе имеется одно терминальное устройство 100 камеры, право управления областью R1 изображения назначается только одному клиентскому терминалу 200. Когда, например, доступно право управления областью R1 изображения, первый вступающий клиентский терминал 200 (здесь оператор 1) может получить право управления областью R1 изображения. Клиентский терминал 200 (здесь оператор 2), который вступает в состоянии, в котором оператор 1 удерживает право управления областью R1 изображения, находится в состоянии готовности, пока право управления областью R1 изображения не станет доступным.
3) Обработка, относящаяся к назначению права управления
При попытке получения права управления пользователь выполняет управление на стороне клиентского терминала 200 для выбора области R1 изображения или области R2 изображения. Случай, объясненный здесь - когда выбранный клиентский терминал 200, показанный на фиг.15, получает право управления видео 1 области R2 изображения. Управление в данном случае выполняется, например, путем использования блока 206 ввода, такого как мышь, клавиатура и т.п., для определения внешней рамки видео 1, отображенного в блоке 208 отображения. Однако настоящее изобретение не ограничено данным примером. В ответ на вышеописанную операцию блок 202 получения/передачи передает терминальному устройству 100 камеры информацию (информацию запроса управления), обозначающую, что клиентский терминал 200 пытается получить право управления видео 1.
Следует отметить, что когда клиентский терминал 200 пытается получить право управления видео 2, информация (информация запроса управления), обозначающая, что клиентский терминал 200 пытается получить право управления видео 2, передается в терминальное устройство 100 камеры.
Информация запроса управления передается посредством вычислительной сети 300 на терминальное устройство 100 камеры, ее получает блок 106 передачи/получения, и затем она передается блоку 108 управления. Когда право управления не было назначено видео 1 или видео 2, для которого выдан запрос управления, блок 108 управления назначает право управления клиентскому терминалу 200, который передал информацию запроса управления, и записывает IP-адрес клиентского терминала 200. Таким образом, когда блок 108 управления получает информацию, которая задает область видео 1 из клиентского терминала 200, для которого назначено право управления, блок 108 управления извлекает секцию, соответствующую заданной области из полного изображения (прямая видеосъемка), которое передается из блока 102 камеры, и выдает команду закодировать только извлеченную секцию этой области. Блок 106 передачи/получения получает прямую видеосъемку области А, для которой была выполнена обработка кодирования, из блока 104 обработки изображения и передает посредством вычислительной сети 300 закодированную область А клиентскому терминалу 200, который имеет право управления.
Назначение права управления механической областью R1 изображения может быть выполнено аналогичным образом. Пользователь выполняет управление со стороны клиентского терминала 200 для выбора области R1 изображения. Операция выполняется, например, путем использования блока 206 ввода, такого как мышь, клавиатура или т.п., для задания внешней рамки области R1 изображения, отображенной в блоке 208 отображения. Однако настоящее изобретение не ограничено данным примером. В ответ на вышеописанную операцию блок 202 передачи/получения передает терминальному устройству 100 камеры информацию (информация запроса управления), обозначающую, что клиентский терминал 200 пытается получить право управления областью R1 изображения.
Информация запроса управления передается посредством вычислительной сети 300 на терминальное устройство 100 камеры, ее получает блок 106 получения/передачи, и затем она передается блоку 108 управления. Когда право управления не было назначено области R1 изображения, для которой выдана управляющая информация, блок 108 управления назначает право управления клиентскому терминалу 200, который передал информацию запроса управления, и записывает IP-адрес клиентского терминала 200. Таким образом, когда блок 108 управления получает информацию, которая задает область из области R1 изображения клиентского терминала 200, которому назначено право управления, блок 108 управления механическим образом управляет панорамированием, наклоном и масштабированием блока 102 камеры. Блок 102 камеры, таким образом, передает видео, соответствующее области R1 изображения, блоку 104 обработки изображения. Из прямой видеосъемки, переданной из блока 102 камеры, блок 104 обработки изображения извлекает секцию, соответствующую области, заданной областью R2 изображения, и выполняет обработку кодирования только для извлеченной секции этой области. Блок 106 передачи/получения получает прямую видеосъемку области R2 изображения, для которой выполнена обработка кодирования, из блока 104 обработки изображения и передает посредством вычислительной сети 300 закодированную область R2 изображения клиентскому терминалу 200, который имеет право управления. Следует отметить, что когда видео извлекается блоком 203 обработки изображения клиентского терминала 200, после того как прямая видеосъемка, полученная блоком 102 камеры, была закодирована, закодированная прямая видеосъемка передается клиентскому терминалу 200 посредством вычислительной сети 300, и видео извлекается блоком 203 обработки изображения.
Следует отметить, что настройки управления согласно третьему варианту осуществления могут быть применены и для первого варианта осуществления, и для второго варианта осуществления.
Согласно вышеописанному третьему варианту осуществления в зависимости от присутствия или отсутствия соответствующих прав управления механическими операциями PTZ и цифровыми операциями PTZ, возможно оптимально управлять областью R1 изображения и областью R2 изображения на клиентском терминале 200.
Примеры вариантов осуществления настоящего изобретения описаны подробно выше со ссылкой на прилагаемые чертежи. Однако настоящее изобретение не ограничено вышеописанными примерами. Специалистам должно быть понятно, что различные модификации, комбинации, подкомбинации и изменения могут иметь место в зависимости от требований к дизайну и других факторов в объеме приложенной формулы изобретения или ее эквивалентов.
Настоящее изобретение содержит объект, связанный с объектом, раскрытым в приоритетной заявке на патент Японии JP 2010-171344, зарегистрированной в Патентном бюро Японии 30 июля 2010 года, полное содержание которой включено в настоящую заявку путем ссылки на нее.
Изобретение относится к средствам управления камерой. Технический результат заключается в увеличении диапазона полученного изображения. Получают первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного блоком камеры. Получают вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения. Управляют механическим перемещением блока камеры на основе первой информации. Получают изображение первой области из полного изображения, зафиксированного блоком камеры, и извлекают изображение второй области из первой области на основе второй информации. 5 н. и 13 з.п. ф-лы, 20 ил.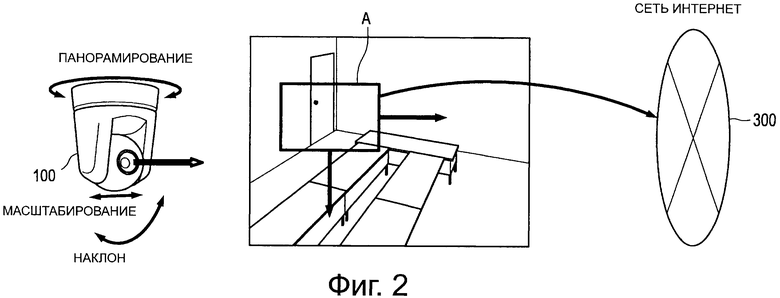
1. Съемочное устройство, содержащее:
Блок получения первой информации, который получает первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного блоком камеры;
блок получения второй информации, который получает вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения;
блок управления, который управляет механическим перемещением блока камеры на основе первой информации; и
блок обработки изображения, который получает изображение первой области из полного изображения, зафиксированного блоком камеры, и который извлекает изображение второй области из первой области на основе второй информации.
2. Съемочное устройство по п.1, в котором, когда изменение первой области не задано первой информацией и вторая область изменяется в пределах первой области, блок управления фиксирует перемещение блока камеры, и блок обработки изображения извлекает изображение второй области, которое изменяется в пределах первой области.
3. Съемочное устройство по п.1, в котором, когда первая область изменяется в диапазоне, который включает в себя вторую область, блок обработки изображения не изменяет положение второй области и извлекает изображение второй области из первой области.
4. Съемочное устройство по п.1, в котором блок управления управляет перемещением блока камеры на основе первой информации и также, когда вторая область задана так, что она превышает диапазон первой области, блок управления управляет перемещением блока камеры на основе второй информации.
5. Съемочное устройство по п.1, в котором, когда вторая область перемещается в соответствии с перемещением блока камеры и расположена за пределами первой области, блок обработки изображения изменяет вторую область так, что вторая область находится в пределах первой области, и извлекает изображение второй области.
6. Съемочное устройство по п.1, в котором, когда вторая область изменяется, блок управления управляет перемещением блока камеры так, что взаимное расположение первой области и второй области сохраняется в том же состоянии.
7. Съемочное устройство по п.1, в котором, когда первая область изменяется, блок обработки изображения изменяет вторую область так, что взаимное расположение первой области и второй области сохраняется в том же состоянии, и извлекает изображение второй области.
8. Система камеры, в которой терминальное устройство камеры, фиксирующее изображения, и клиентское терминальное устройство, которое управляет терминальным устройством камеры, соединены посредством вычислительной сети, в которой терминальное устройство камеры содержит:
блок получения первой информации, который получает первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного блоком камеры;
блок получения второй информации, который получает вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения;
блок управления, который управляет механическим перемещением блока камеры на основе первой информации; и
блок обработки изображения, который получает изображение первой области из полного изображения, зафиксированного блоком камеры, и который извлекает изображение второй области из первой области на основе второй информации.
9. Устройство управления камерой, содержащее:
блок получения первой информации, который получает первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного терминальным устройством камеры;
блок получения второй информации, который получает вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения;
блок передачи, который передает терминальному устройству камеры информацию, используемую для управления механическим перемещением блока камеры на основе первой информации; и
блок обработки изображения, который получает изображение первой области из полного изображения, зафиксированного блоком камеры, и который извлекает изображение второй области из первой области на основе второй информации.
10. Устройство управления по п.9, дополнительно содержащее блок отображения, который отображает и полное изображение, и неполное изображение, соответствующее изображению второй области.
11. Устройство управления по п.9, в котором блок передачи передает управляющую информацию для управления перемещением блока камеры на основе первой информации и также для управления перемещением блока камеры на основе второй информации, когда вторая область задана так, что вторая область превышает диапазон первой области.
12. Устройство управления по п.9, в котором, когда вторая область перемещается в соответствии с перемещением блока камеры и расположена за пределами первой области, блок обработки изображения изменяет вторую область так, что вторая область находится в пределах первой области, и извлекает изображение второй области.
13. Устройство управления по п.9, в котором, когда изменяют вторую область, блок передачи передает управляющую информацию для управления перемещением блока камеры так, что взаимное расположение первой области и второй области сохраняется в том же состоянии.
14. Устройство управления по п.9, в котором, когда изменяют первую область, блок обработки изображения изменяет вторую область так, что взаимное расположение первой области и второй области сохраняется в том же состоянии, и извлекает изображение второй области.
15. Носитель записи, содержащий записанную на нем программу, которая содержит команды, заставляющие компьютер функционировать как:
блок, который получает первую информацию, используемую для управления первой областью, которая задана в пределах полного изображения, зафиксированного блоком камеры;
блок, который получает вторую информацию, используемую для управления второй областью, которая задана в пределах полного изображения;
блок, который управляет механическим перемещением блока камеры на основе первой информации; и
блок, который получает изображение первой области из полного изображения, зафиксированного блоком камеры, и извлекает изображение второй области из первой области на основе второй информации.
16. Устройство управления камерой, содержащее:
блок управления отображением, который выполняет управление так, что отображается область полного изображения, при этом область полного изображения отображает полное изображение, зафиксированное камерой; и
блок управления камерой, который управляет камерой так, что камера фиксирует направление, соответствующее первой области, заданной для полного изображения, и в котором блок управления отображением отображает область неполного изображения, в которой изображение отображается путем увеличения второй области, включенной в первую область, и выполняет управление так, что первая область и вторая область отображаются в разных состояниях отображения на полном изображении.
17. Устройство управления по п.16, в котором блок управления отображением выполняет управление так, что вторая область является непостоянной, когда вторая область находится в пределах диапазона первой области.
18. Устройство управления по п.16, в котором при управлении и изменении второй области, когда предпринимается попытка изменить вторую область так, что вторая область превышает диапазон первой области, блок управления отображением изменяет также первую область и выполняет управление так, что вторая область включена в диапазон первой области; и в котором блок управления камерой выполняет управление так, что фиксируется направление, соответствующее измененной первой области
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 7450840 B2, 11.11.2008 | |||
| УСТРОЙСТВО КОДИРОВАНИЯ ДВИЖУЩИХСЯ ИЗОБРАЖЕНИЙ, СПОСОБ И ПРОГРАММА УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2004 |
|
RU2335859C2 |

