Суть изобретения
Изобретение относится к информационно-измерительной технике и может быть использовано в системе освещения надводной обстановки, для расширения радиотехнического и оптического горизонта потребителя информации, с целью обзора надводной обстановки с помощью аппаратуры определения радиотехнических характеристик источников излучения радиоволн и системы оптического наблюдения, управляемой в реальном масштабе времени потребителем, и последующей передачей полученных данных потребителю в реальном масштабе времени, с учетом рефракционной картины, с возможностью многократного использования заявленного устройства благодаря системе спасения, сигнализации о местоположении, прогнозированию района приземления с исключением попадания данного устройства в руки другой стороны и обеспечением возможности посадки в назначенном районе с помощью используемой в составе устройства управляемой парашютной системы.
Описание изобретения
Изобретение относится к информационно-измерительной технике и может быть использовано в системе освещения надводной обстановки, для расширения радиотехнического и оптического горизонта потребителя информации, с целью обзора надводной обстановки с помощью аппаратуры определения радиотехнических характеристик источников излучения радиоволн и системы оптического наблюдения, управляемой в реальном масштабе времени потребителем, и последующей передачей полученных данных потребителю в реальном масштабе времени, с учетом рефракционной картины, с возможностью многократного использования заявленного устройства благодаря системе спасения, сигнализации о местоположении, прогнозированию района приземления с исключением попадания данного устройства в руки другой стороны и обеспечением возможности посадки в назначенном районе с помощью используемой в составе устройства управляемой парашютной системы.
В настоящее время для решения разнообразных задач наблюдения земной поверхности известны способы, системы и устройства для видеонаблюдения и радиотехнического наблюдения за наземной обстановкой, а именно:
- патент РФ RU 2.279.999 С2, B64D 47/08, опубликован 20.07.2006;
- патент РФ RU 2.272.753 С2, В64С 39/02, опубликован 27.03.2006;
- патент РФ RU 2.248.307 C1, В64С 29/00, G08C 21/00, опубликован 20.03.2005;
- патент США US 6.712.312 ВА, В64С 33/02, опубликован 30.03.2004;
- патент США US 5.575.438 A, B64D 47/00, опубликован 19.11.1994;
- патент Франции FR 02.707.386 A1, F41H 13/00, В64С 39/10, В64С 39/02, B64D 47/00, опубликован 13.01.1995;
- патент ЕПВ ЕР 1.391.681 A1, F41G 3/02, опубликован 25.02.2004;
- РОСТИЧ Р. Разработка в США перспективных беспилотных летательных аппаратов для ВМС // Зарубежное военное обозрение. 2003, №7, с.61-63. Патент РФ RU 2.248.307 C1, В64С 29/00, G08C 21/00, опубликован 20.03.2005.
Из известных систем и устройств близким, в том числе, является патент RU 2387584 G01V 8/00, опубликованный 27.04.2010.
Изобретение относится к технике видеонаблюдения и может быть использовано для оперативного изучения окружающей обстановки в условиях ограниченных возможностей наблюдения из-за наличия естественных и искусственных препятствий. Система видеонаблюдения за наземной обстановкой содержит связанную с парашютом малогабаритную неуправляемую нестабилизированную платформу для размещения бортового комплекса наблюдения. Последний включает в себя последовательно соединенные бортовую камеру наблюдения, аналого-цифровой преобразователь, бортовое форматирующее устройство, блок сжатия данных, помехоустойчивый кодер, блок расширения спектра, фазовый модулятор и передатчик с передающей антенной. Наземный комплекс включает в себя последовательно соединенные радиоприемник с приемной антенной, согласованный фильтр, декодер помехоустойчивого кода, блок формирования видеосигнала изображения и монитор.
По результатам анализа данной системы необходимо отметить, что из-за отсутствия гиростабилизации естественные колебания камеры наблюдения, вызванные изменчивым характером воздушной среды, как по плотности, так и по скорости перемещения в ней воздушных масс, значительно затрудняют обзор выбранного пространства или объекта наблюдения, в ряде случаев делая это невозможным. Отсутствует управление оптическим прибором по пеленгу и углу места, что не позволяет производить наблюдения за объектом в случае изменения его положения или выхода данного объекта из области обзора оптических средств наблюдения. Ввиду отсутствия аппаратуры определения радиотехнических характеристик источников излучения радиоволн, в составе заявленного устройства, становится невозможным освещение обстановки над районом в условиях плохой видимости. Отсутствие устройства для определения собственных координат лишает возможности определения точного местоположения как самого устройства, так и наблюдаемого объекта. Без системы самоликвидации данная техника может попасть в руки другой стороны. При приземлении на твердую поверхность или в водную среду устройство наблюдения будет выведено из строя или безвозвратно утрачено ввиду отсутствия у него системы спасения, обеспечивающей положительную плавучесть и уменьшение силы удара о поверхность в допустимых пределах для сохранения работоспособности устройства. В состав данного устройства не входит система сигнализации о местоположении, что может привести к утрате устройства и невозможности его многократного использования. Наличие передатчика в составе бортовой аппаратуры не позволяет производить потребителю управление данным устройством. Применение неуправляемой парашютной системы, входящей в состав устройства, при использовании на всем отрезке снижения приведет к значительному сносу устройства от места его запуска в результате воздействия ветра, что значительно увеличит время, необходимое на его поиск, а в ряде случаев сделает это невозможным. В этом случае становится невозможным посадка данного устройства в заданном районе. Отсутствие датчиков скорости и направления ветра делает невозможным прогнозирование района приземления устройства для его дальнейшего спасения. Наличие передатчика в составе бортовой аппаратуры не позволяет производить потребителю управление данным устройством.
Наиболее близким к предлагаемому изобретению следует считать «Устройство для определения наличия или отсутствия сигнала РЛС на разных высотах над водной поверхностью» патент РФ №2477868, G01S 13/00, опубликовано 20.03.2013. Устройство состоит из приборного отсека, в состав которого входит аппаратура, определяющая радиотехнические характеристики принимаемого сигнала, непосредственно связанная с радиовысотомером, определяющим высоту наличия или отсутствия радиолокационного сигнала на разных высотах, а также датчики температуры воздуха влажности и давления, в составе приборного отсека также имеется блок питания, радиопередающая аппаратура, осуществляющая передачу полученных данных потребителю, предлагаемое стабилизирующее устройство, в зависимости от необходимой скорости регистрации наличия или отсутствия радиолокационного сигнала на разных высотах, может одновременно выполнять функции тормозящего устройства, когда устройство находится в полете, позволяющем фиксировать наличия или отсутствия радиолокационного сигнала на разных высотах.
Нахождение в составе бортовой аппаратуры для освещения надводной обстановки только лишь устройства, определяющего радиотехнические характеристики источников излучения радиоволн, не предоставляет полной картины. В случае, если на носителях отсутствуют источники излучения или они не работают, то обнаружение таких объектов невозможно. Отсутствие устройства для определения собственных координат лишает возможности определения точного местоположения как самого устройства, так и наблюдаемого объекта. Без системы самоликвидации, данная техника может попасть в руки другой стороны. При приземлении на твердую поверхность или в водную среду устройство будет выведено из строя или безвозвратно утрачено ввиду отсутствия у него системы спасения, обеспечивающей положительную плавучесть и уменьшение силы удара о поверхность в допустимых приделах для сохранения работоспособности устройства. В состав данного устройства не входит система сигнализации о местоположении, что может привести к утрате устройства и невозможности его многократного использования. Применение одной тормозной и стабилизирующей системы, входящей в состав устройства, при использовании на всем отрезке снижения приведет к значительному сносу устройства от места его запуска в результате воздействия ветра, что значительно увеличит время, необходимое на его спасение, а в ряде случаев сделает это невозможным. В данном устройстве для обеспечения необходимых условий работы аппаратуры выбрано устройство, обеспечивающее торможение в атмосфере и стабилизацию. Подобные функции могут выполнять, в том числе, парашютные системы с нейтральным парашютом, т.е. парашютом, не имеющим собственной горизонтальной скорости. Применение парашюта, имеющего аэродинамическое качество, в составе данного устройства малоэффективно, а в определенных случаях невозможно из-за отсутствия органов управления им. Таким образом, отсутствие парашюта, имеющего аэродинамическое качество и устройства управления им, приводит к невозможности посадки данного устройства в назначенном районе с ограниченными размерами. Наличие передатчика, в составе бортовой аппаратуры, не позволяет производить потребителю управление данным устройством. Отсутствие датчиков скорости и направления ветра делает невозможным прогнозирование района приземления устройства для его дальнейшего спасения в случае выхода из строя системы управления устройством или навигационной системы.
Задачей предлагаемого изобретения является создание спускаемого разведывательного модуля, лишенного вышеназванных недостатков, с целью увеличения информативности, качества предоставляемой информации, расширения области применения, с возможностью многократного использования данного устройства без возможности попадания его в руки других пользователей и обеспечения возможности посадки в назначенном районе.
Устранение вышеназванных недостатков прототипа и указанный технический результат достигается тем, что в состав заявляемого устройства вводится парашютная система с аэродинамическим качеством и система управления им, система оптического наблюдения, состоящая из оптического устройства, гиростабилизированной платформы, подсистемы управления оптическим устройством по пеленгу и углу места, навигационной системы, определяющей местоположение устройства в пространстве, системы управления заявленным устройством на базе микроЭВМ, с передачей данных по средствам приемо-передающего устройства потребителю в реальном масштабе времени. Также в состав устройства входит система самоликвидации, состоящая из боеприпаса с детонатором, предохранительно-исполнительного механизма, датчика воды, датчика перегрузки; система спасения, состоящая из емкостей, которые обеспечивают положительную плавучесть и уменьшение силы удара о поверхность в допустимых пределах для сохранения работоспособности устройства, резервуаров с рабочим газом, пироклапанов; системы световой сигнализации о местоположении устройства, датчиков скорости ветра и направления ветра.
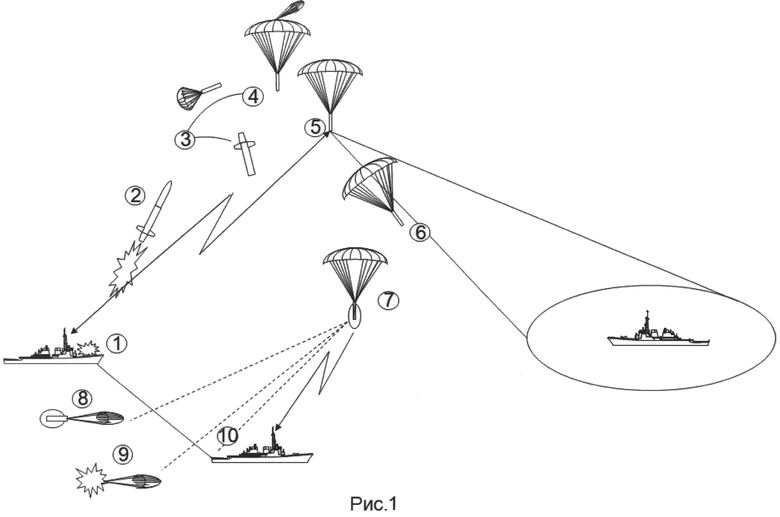
Описанное устройство работает следующим образом. Осуществляется старт носителя с заявленным устройством (Рис.1.1). В заданной точке траектории полета зенитной ракеты (Рис.1.2), или какой-либо иной ракеты земля-воздух, воздух-воздух или реактивного снаряда (PC), или с помощью сброса с летательного или космических аппаратов, отделяют головную часть - спускаемый разведывательный модуль (Рис.1.3) от реактивного двигателя или любого другого носителя, находящегося на заданной высоте. После отделения в начальный момент времени устройство за счет начальных возмущений при разделении совершает нестабилизированный полет. Затем срабатывает устройство, стабилизирующее траекторию полета устройства, в зависимости от необходимой скорости, может из себя представлять парашют, выполняющий одновременно функцию тормозящего устройства, либо стабилизатор из твердого материала с необходимыми параметрами прочности.
После начала стабилизированного полета и достижения приемлемой скорости раскрывают основной парашют (например, «Крыло» он же «Парафойл»), имеющий аэродинамическое качество (Рис.1.4), затем начинает свою работу целевая аппаратура. Оптическая система наблюдения получает данные о надводной обстановке вместе с системой определения радиотехнических характеристик источников излучения радиоволн, передает их в систему управления заявленного устройства, где они комплексируются с данными навигационной системы, показаниями датчиков давления, температуры влажности, высотомера, позволяя определять гидрометеоусловия на разных высотах и учитывать рефракцию радиоволн известными способами для более точного определения параметров движения объектов наблюдения - источников излучения радиоволн. Полученные данные передают с помощью приемопередатчика на потребитель в реальном масштабе времени (Рис.1.5). Потребитель, получающий данные, обрабатывает их и производит управление системой оптического наблюдения по углу места и пеленгу, с помощью посылаемых команд на заявленное устройство, производит наблюдение за объектами, выявленными аппаратурой, определяющей радиотехнические характеристики источников излучения радиоволн, и осматривает горизонт в поисках объектов, не обнаруженных данной аппаратурой. Во время работы и после выполнения поставленной задачи целевой аппаратурой спускаемого разведывательного модуля «Светлячок» (далее для краткости СРМ - спускаемый разведывательный модуль) оператор управляет маневрированием (Рис.1.4-1,7) заявленного устройства в реальном масштабе времени с помощью воздействия на органы управления парашюта, манипуляторов системы управления парашютом, которые получают команды через систему управления СРМ от приемо-передающего устройства, которое, в свою очередь, получает необходимые команды от потребителя информации (например, оператора, осуществляющего управление устройством и прием от него данных). В случае, если обстановка располагает к дальнейшему использованию заявленного устройства, на заданной потребителем высоте или до запуска СРМ устанавливают (в системе управления) высоту, на которой начинает срабатывать система сигнализации местоположения (Рис.1.7). Сигнализирует спасательной команде, о своем местонахождении несколькими источниками света, работающими по периметру устройства, дополнительно система управления СРМ выдает потребителю собственные координаты, попутно включается система спасения после срабатывания пироклапанов, получивших команду от системы управления СРМ, надувая емкости с положительной плавучестью, рабочим газом из резервуаров, покрывая тем самым заявленное устройство и обеспечивая его приводнение или приземление с сохранением устройства для многоразового использования (Рис.1.8). Для прогнозирования места приземления в случае отказа системы управления и навигационной системы введены датчики скорости ветра и направления ветра.
В случае, если складывается неблагоприятная обстановка, определяемая потребителем, позволяющая другим лицам вместо потребителя, запустившего его, захватить данное устройство при его приводнении, то до запуска СРМ или во время проведения им полета устанавливается значение высоты, на которой снимают ступень предохранения с боеприпаса, осуществляющего ликвидацию СРМ. В случае срабатывания датчиков перегрузки и датчиков воды, сигнализирующих о приводнении СРМ, производится его самоликвидация подрывом (Рис.1.9).
Если позволяют условия, посадка СРМ может быть осуществлена на борт корабля, или на какую-либо другую ограниченную размерами территорию (Рис.1.10).
С помощью комбинированной работы системы оптического наблюдения и аппаратуры, определяющей радиотехнические характеристики источников излучения радиоволн, определяют параметры движения наблюдаемых объектов, классифицируются надводные, наземные или воздушные объекты, а также поступает другая информация, интересующая потребителя. Способы и алгоритмы определения данной информации выбирает потребитель в зависимости от преследуемых целей. Например, может производится определение тех или иных параметров объектов наблюдения как в системе управления СРМ, так и потребителем, получающим информацию в реальном масштабе времени, либо комбинированным способом, осуществляя определение одной части параметров в системе управления СРМ, а другую часть определяет потребитель. Определение тех или иных характеристик наблюдаемых объектов осуществляется известными способами, часть из которых приведена в книге ОСНОВЫ РАДИОПРОТИВОДЕЙСТВИЯ И РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ С.А. ВАКИН, Л.Н. ШУСТОВ. ИЗДАТЕЛЬСТВО «СОВЕТСКОЕ РАДИО», Москва, - 1968 (Глава №10).
Что касается оптического канала наблюдения, то определение параметров движения, а также принадлежности к объекту наблюдения определяют визуально, используя также известные способы. Однако, как было отмечено выше, непосредственно алгоритмы и способы обработки информации устанавливаются потребителем.
Таким образом, представленные описания и чертежи позволяют сделать заключение о том, что заявляемое изобретение обладает новизной, отличаясь от прототипа такими существенными признаками как наличие:
- парашютной системы с аэродинамическим качеством;
- системы управления парашютной системой;
- системы оптического наблюдения, состоящей из оптического устройства гиростабилизированной платформы подсистемы управления оптическим устройством по пеленгу и углу места;
- навигационной системы (обеспечивающей определение местоположение заявленного устройства в пространстве);
- системы самоликвидации, состоящей из боеприпаса с детонатором, предохранительно-исполнительного механизма, датчиков воды, датчиков перегрузки;
- системы спасения, состоящей из емкостей, обеспечивающих положительную плавучесть, покрывая заявленное устройство и уменьшая силу удара о поверхность в допустимых приделах, для сохранения работоспособности устройства, резервуаров с рабочим газом и пироклапанов;
- системы оптической сигнализации местоположения;
- системы управления СРМ на базе ЭВМ;
- приемо-передающего устройства.
Что позволяет выполнить поставленные задачи и сделать вывод о наличии изобретательского уровня и промышленной применимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ НАБЛЮДАТЕЛЯ ДО РАБОТАЮЩЕГО НА ИЗЛУЧЕНИЕ ИСТОЧНИКА РАДИОВОЛН | 2012 |
|
RU2523699C2 |
| Устройство радиомониторинга морских и воздушных объектов с применением привязного беспилотного летательного аппарата мультикоптерной схемы с электропитанием по тросу-кабелю | 2023 |
|
RU2813105C1 |
| МНОГОЦЕЛЕВАЯ АЭРОСТАТНАЯ СИСТЕМА УСКОРЕННОГО ВЫВОДА НА ЗАДАННУЮ ВЫСОТУ | 2013 |
|
RU2526633C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ИЛИ ОТСУТСТВИЯ СИГНАЛА РЛС НА РАЗНЫХ ВЫСОТАХ НАД ВОДНОЙ ПОВЕРХНОСТЬЮ | 2011 |
|
RU2477868C2 |
| СПОСОБ ПОСАДКИ СВЕРХЛЕГКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2307047C1 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| МАЛОГАБАРИТНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2008 |
|
RU2387584C1 |
| Подвесная система для людских десантных парашютных систем | 2020 |
|
RU2768066C1 |
| Способ пристрелки цели с использованием специального реактивного снаряда | 2019 |
|
RU2715466C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
Спускаемый разведывательный модуль относится к информационно-измерительной технике и может быть использован в системе освещения надводной обстановки. Достигаемый технический результат - увеличение информативности, качества информации, с возможностью многократного использования. Указанный результат достигается тем, что разведывательный модуль состоит из системы электропитания, системы определения радиотехнических характеристик источников излучения радиоволн, датчиков давления, влажности и температуры, высотомера, устройства, стабилизирующего полет и осуществляющего торможение падения, состоит также из парашютной системы, системы управления парашютом, системы оптического наблюдения, навигационной системы, системы самоликвидации, системы спасения, системы оптической сигнализации местоположения, системы управления спускаемого разведывательного модуля, приемо-передающего устройства. Перечисленные средства функционируют определенным образом в составе разведывательного модуля. 1 ил.
Спускаемый разведывательный модуль, состоящий из системы электропитания, системы определения радиотехнических характеристик источников излучения радиоволн, датчиков давления, влажности и температуры, высотомера, устройства, стабилизирующего полет и осуществляющего торможение падения, отличающийся тем, что введены дополнительно парашютная система, имеющая аэродинамическое качество, система управления парашютом, система оптического наблюдения, состоящая из оптического устройства, гиростабилизированной платформы, подсистемы управления оптическим устройством по пеленгу и углу места с передачей данных оптического наблюдения в систему управления, куда одновременно поступает информация от системы определения радиотехнических характеристик источников излучения радиоволн, навигационной системы, сигнализирующей о его текущем положении в пространстве и текущих значениях температуры, давления, влажности и высоты, позволяющих, определяя гидрометеоусловия на разных высотах, учитывать рефракцию радиоволн для более точного определения параметров движения объектов наблюдения - источников излучения радиоволн, с передачей данных потребителю в реальном масштабе времени с помощью приемо-передающего устройства, которое параллельно позволяет потребителю производить управление в реальном масштабе времени системой оптического наблюдения и выдавать команды на снятие ступени предохранения с системы самоликвидации, состоящей из боеприпаса с детонатором, предохранительно-исполнительного механизма, датчиков воды и датчиков перегрузки, позволяющей исключить попадание устройства к другим пользователям, для обеспечения многократного использования устройства в его состав введена системы спасения, состоящая из емкостей, которые обеспечивают положительную плавучесть и уменьшение силы удара о поверхность в допустимых приделах для сохранения работоспособности устройства, емкостей с рабочим газом, пироклапанов, для облегчения поиска введена система оптической сигнализации местоположения заявленного устройства, состоящая из источников яркого света и источника питания, для прогнозирования места приземления в случае отказа системы управления и навигационной системы введены датчики скорости ветра и направления ветра.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ИЛИ ОТСУТСТВИЯ СИГНАЛА РЛС НА РАЗНЫХ ВЫСОТАХ НАД ВОДНОЙ ПОВЕРХНОСТЬЮ | 2011 |
|
RU2477868C2 |
| МАЛОГАБАРИТНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2008 |
|
RU2387584C1 |
| ИНТЕГРИРОВАННЫЙ МЕХАНИЗМ "ВИППЕР" ПОДГОТОВКИ И ОСУЩЕСТВЛЕНИЯ ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ, ОСНАЩАЕМЫЙ БЛОЧНО-МОДУЛЬНЫМ ОБОРУДОВАНИЕМ И МАШИНОЧИТАЕМЫМИ НОСИТЕЛЯМИ БАЗ ДАННЫХ И БИБЛИОТЕК СМЕННЫХ ПРОГРАММНЫХ МОДУЛЕЙ | 2005 |
|
RU2315258C2 |
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |
| US 6219620 B1, 17.04.2001 | |||
| Связующее для минераловатных плит | 1974 |
|
SU516662A1 |
| US 5119341 A, 02.08.1992 | |||

