Изобретение относится к способам посадки беспилотных летательных аппаратов (БЛА), в частности к способам посадки сверхлегких (массой не более одного килограмма) БЛА, оснащенных бортовыми электронными устройствами наблюдения, навигации и автоматического управления полетом.
Известен способ посадки БЛА с помощью парашютной системы (например, информационный бюллетень "Иностранная печать об экономическом, научно-техническом и военном потенциале...", серия "Технические средства разведывательных служб капиталистических государств", Москва, №6, 1998, с.21), при котором на БЛА предварительно устанавливают парашютную систему, при посадке раскрывают парашют и с его помощью гасят скорость приземления БЛА до допустимого значения.
Недостатком этого способа является увеличение общей массы БЛА за счет массы парашютной системы, приводящее к необходимости существенного уменьшения массы полезной нагрузки. Из-за указанных массогабаритных ограничений использование парашютной системы для посадки сверхлегких БЛА затруднительно.
Другой известный способ посадки БЛА (как малой, так и большой массы) основан на гашении относительной скорости за счет скоординированного с полетом БЛА движения посадочной площадки. К этому классу технических решений относится, например, способ посадки БЛА по японскому патенту JP №2001354199, В64F 1/00, В63В 35/50, В64С 13/18. Этот способ основан на движении посадочной площадки, роль которой выполняет палуба надводного судна (например, корабля, баржи), со скоростью, близкой к горизонтальной составляющей скорости БЛА, на заключительном участке посадки. Согласно указанному способу, измеряют горизонтальную составляющую скорости БЛА и регулируют скорость движения судна таким образом, чтобы относительная скорость сближения БЛА и поверхности палубы судна стремилась к нулю.
Очевидно, что такой способ может иметь весьма ограниченное применение, поскольку создает значительные неудобства для объекта, используемого в качестве посадочной площадки.
Для устранения этого недостатка в качестве посадочной площадки используют подвижную платформу, на которой устанавливают вертикальную раму с посадочной сетью, выполненную с возможностью поворота вокруг вертикальной оси и горизонтального перемещения по закрепленным на платформе направляющим. На борту БЛА и на платформе устанавливают специальные электронные посадочные средства (оптические или радиолокационные). Эти средства позволяют дистанционно контролировать относительное местоположение и скорость сближения БЛА с сетью и управлять как движением рамы с сетью, так и полетом БЛА на конечном участке захода на посадку таким образом, чтобы БЛА при посадке не получил бы механических повреждений.
Так, в известном способе посадки БЛА путем улавливания его в вертикальную сеть, описанном в обзоре "Дистанционно пилотируемые летательные аппараты капиталистических стран"./Под редакцией Федосова Е.А., Москва, Научно-информационный центр, 1989, с.51-61, в носовой части БЛА устанавливают импульсный источник излучения, работающий в ближней инфракрасной (ИК) области спектра. На посадочной площадке устанавливают платформу с направляющими, которая в процессе посадки БЛА остается неподвижной. На платформу устанавливают вертикальную раму, выполненную с возможностью вращения вокруг вертикальной оси, и привод для этого вращения. На раму устанавливают два ИК-приемника, вертикальную посадочную сеть, выполненную с возможностью ее горизонтального перемещения по направляющим, закрепленным на платформе, вычислитель и тормозное устройство, которое тросами соединяют с сетью. На конечном участке захода БЛА на посадку путем дистанционного управления с земли выводят его в зону действия ИК-приемников, измеряют с их помощью угол возвышения и боковое смещение БЛА относительно центра сети, вычисляют значения отклонений БЛА от запрограммированной траектории захода на посадку и передают эти данные на борт БЛА для обеспечения его попадания в сеть. При входе БЛА в сеть перемещают последнюю вдоль направляющих рамы, гасят кинетическую энергию движения БЛА за счет вытягивания тросов тормозного устройства и высвобождают из сети попавшийся в нее БЛА.
Как видно из вышеприведенного описания, для реализации способа посадки БЛА в сеть требуется довольно сложное и громоздкое наземное оборудование. Это ограничивает сферу возможного применения указанных способов, особенно в тех случаях, когда БЛА должен иметь небольшую стоимость, малые массу и габариты. Для таких БЛА ни по тактическим, ни по экономическим соображениям не оправдано применение сложных посадочных устройств.
Что касается обычного самолетного способа горизонтальной посадки, то для сверхлегких БЛА он неприемлем, поскольку требует наличия взлетно-посадочной полосы. Более интересен для БЛА способ вертикальной посадки, используемый вертолетами и специальными самолетами с вертикальным взлетом и посадкой. Однако эти летательные аппараты сложны в эксплуатации и управлении, дороги и обычно используются лишь в пилотируемой авиации.
Следует отметить, что в истории авиации предпринимались многочисленные попытки создания гибридных летательных аппаратов нетрадиционных схем, которые могли бы безопасно садиться в любом месте земной поверхности (например, книга Бауэре П. "Летательные аппараты нетрадиционных схем", Москва, "Мир", 1991).
Так, например, в основе изобретения по патенту RU №2278801, В64С 29/02, В64С 25/40 лежит идея использования при посадке сверхлегкого БЛА явления авторотации.
Согласно этому способу, до начала полета БЛА на его борту устанавливают электронную аппаратуру наведения, а на посадочной площадке размещают наземное посадочное оборудование, в самолетном режиме осуществляют горизонтальный полет и заход на посадку, на заключительном участке посадки с помощью бортовой электронной аппаратуры наведения и наземного посадочного оборудования наводят БЛА на посадочную площадку и путем гашения кинетической энергии движения БЛА с использованием тормозного механизма осуществляют мягкую посадку БЛА на посадочную площадку, - при этом после начала наведения БЛА на посадочную площадку с помощью силовой установки и аэродинамических органов управления БЛА переводят его в режим авторотации с прецессией относительно вертикально направленного вектора скорости его поступательного движения, после чего с помощью аэродинамических органов управления БЛА уменьшают скорость его вертикального движения относительно земли до значений, обеспечивающих возможность полного гашения кинетической энергии БЛА при его мягкой посадке.
В качестве бортовой электронной аппаратуры наведения используют систему видеонаведения, содержащую бортовой датчик - видеомодуль, в состав которого входят видеокамера с оптической системой и видеопроцессор изображений. В качестве наземного посадочного оборудования используют один или несколько оптических отражателей, например, зеркал, которые располагают, соответственно, в желаемом месте приземления, например, в виде заданной геометрической фигуры - по периметру или внутри посадочной площадки. Для перевода БЛА в режим авторотации синхронно поворачивают плоскости его крыльев во встречных направлениях относительно их продольных осей на углы, не превышающие 90 градусов, а после перевода БЛА в режим авторотации выставляют плоскости крыльев перпендикулярно продольной оси БЛА. В качестве тормозного механизма используют механическую пружину, которую перед началом полета БЛА устанавливают в носовой части БЛА вдоль его продольной оси, при приземлении БЛА по команде системы видеонаведения непосредственно перед касанием поверхности посадочной площадки выпускают механическую пружину и за счет ее действия окончательно гасят кинетическую энергию БЛА, обеспечивая его мягкую посадку в вертикальном положении.
Обеспечиваемый технический результат заключается в использовании эффекта авторотации для уменьшения до безопасных пределов вертикальной скорости снижения БЛА (парашютный эффект) и одновременно в использовании возникающей при этом прецессии для сканирования поверхности земли датчиком бортовой электронной аппаратуры наведения. При снижении БЛА в режиме авторотации под действием воздушного потока его крылья и корпус вращаются подобно несущему винту вертолета, создавая подъемную силу. Движение самого БЛА напоминает при этом падение семени клена.
Описанный выше способ является ближайшим аналогом настоящего изобретения.
Недостатком ближайшего аналога является сложность практической реализации процедуры посадки, требующей использования электронной аппаратуры наведения, а также скоординированного управления двигателем, аэродинамическими органами управления и механическим тормозным устройством (пружиной).
Настоящее изобретение направлено на устранение указанного недостатка ближайшего аналога - на максимально возможное упрощение реализации процедуры посадки.
Предметом изобретения является способ посадки сверхлегкого БЛА, при котором осуществляют горизонтальный полет БЛА над земной поверхностью, по заранее заданной программе или путем дистанционного управления с земли выводят БЛА в район посадки, и после контакта БЛА с земной поверхностью, эвакуируют его из района посадки, - при этом до начала полета БЛА устанавливают на его борту маячковый передатчик с датчиком удара, выполненным с возможностью фиксации момента контакта БЛА с земной поверхностью при выключенной двигательной установке, после вывода БЛА в район посадки выключают его двигательную установку и обеспечивают его падение под воздействием силы тяжести, в момент контакта БЛА с земной поверхностью по сигналу от датчика удара активируют маячковый передатчик, путем радиопеленгации маячкового передатчика определяют местоположение приземлившегося БЛА и осуществляют его розыск для последующей эвакуации.
Частным существенным признаком является то, что радиопеленгацию маячкового передатчика БЛА осуществляют с помощью аппаратуры, аналогичной пеленгатору, используемому в соревнованиях "охота на лис".
Задачей настоящего изобретения является создание такой процедуры посадки сверхлегкого БЛА, которая позволяла бы обойтись без сложной электронной бортовой аппаратуры наведения и размещаемых на местности посадочных оптических устройств.
Обеспечиваемый технический результат заключается в возможности осуществления посадки БЛА практически на любые необорудованные участки земной поверхности.
Суть изобретения поясняется на фиг.1-фиг.3.
На фиг.1 представлен в трех проекциях эскиз конструкции возможного варианта построения сверхлегкого БЛА для реализации заявленного способа.
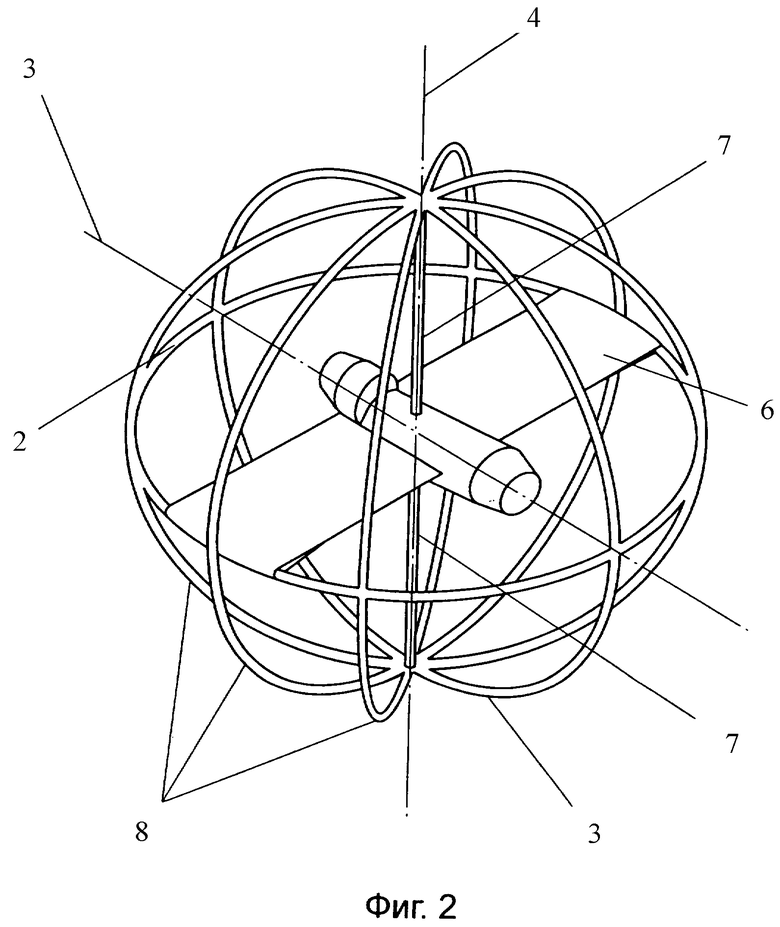
На фиг.2 представлена изометрическая проекция модифицированного варианта конструкции сверхлегкого БЛА для реализации заявленного способа.
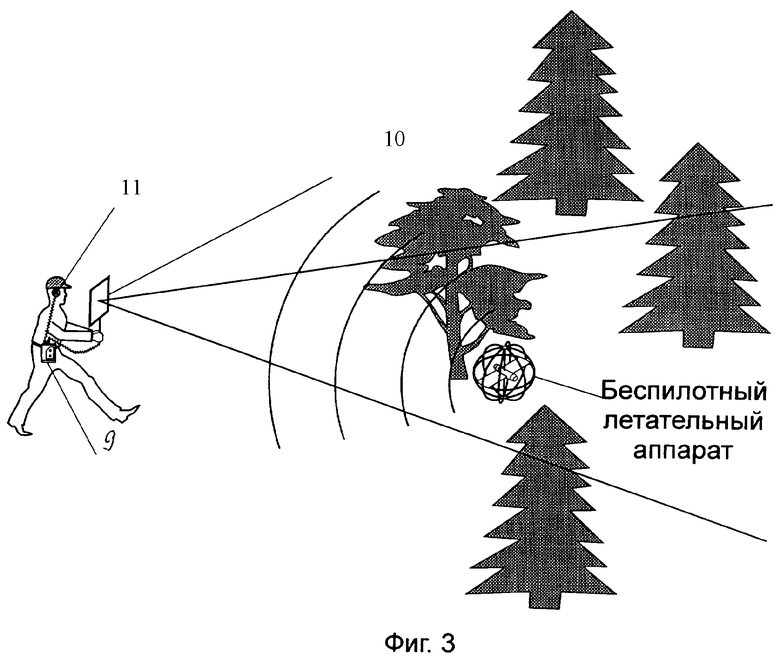
Фиг.3 иллюстрирует процесс поиска БЛА с использованием носимого пеленгатора.
На фиг.1-фиг.3 использованы следующие обозначения: 1 - управляемый импеллер; 2 - первый защитный обруч; 3 - второй защитный обруч; 4 - центральный связующий узел; 5 - отсек для полезной нагрузки; 6 - крыло; 7 - растяжка; 8 - дополнительный защитный обруч; 9 - радиоприемник; 10 - антенна пеленгатора; 11 - наушники.
Рассматриваемый сверхлегкий БЛА, который реализует заявленный способ посадки, имеет нетрадиционную схему построения (фиг.1 и фиг.2).
Сверхлегкий БЛА содержит удлиненный в продольном направлении центральный связующий узел 4, в задней части которого установлена двигательная установка - управляемый импеллер 1, а в передней части расположен отсек 5 для полезной нагрузки. К боковым сторонам центрального связующего узла 4 прикреплены крылья 6.
Продольные оси крыльев 6 перпендикулярны продольной оси центрального связующего узла 4 и лежат с этой осью в одной горизонтальной плоскости, проходящей через центр масс центрального связующего узла 4.
Управляемый импеллер 1 состоит из турбины, приводимой в действие двигателем (например, электрическим), и самого этого двигателя, снабженного реле автоматического включения/выключения, установленным внутри корпуса турбины (на фиг.1 и фиг.2 турбина, двигатель и реле автоматического включения/выключения не показаны).
Полезная нагрузка включает в себя различные электронные устройства, такие как система автоматического управления полетом, средства связи, навигации и видеонаблюдения, а также маячковый передатчик с датчиком удара, срабатывание которого разрешено только при выключенном положении реле автоматического включения/выключения. Датчик удара фиксирует удар при падении БЛА на землю с выключенным двигателем.
Состав полезной нагрузки может варьироваться, в зависимости от задач, решаемых БЛА, и в данном случае не конкретизируется (за исключением обязательного для реализации заявляемого способа датчика удара). Центральный связующий узел 4 с отсеком 5 для полезной нагрузки выполнен из прочного легкого материала, например, из углепластика или стеклопластика.
Особенностью рассматриваемого БЛА является наличие в нем специального посадочного приспособления, выполненного с возможностью поглощения кинетической энергии БЛА при его контакте с земной поверхностью или с каким-либо посторонним предметом, например деревом или столбом.
Указанное посадочное приспособление содержит идентичные защитные обручи, выполненные из жесткого упругого материала, например из углепластиковой трубки. Минимально возможное количество таких защитных обручей - два (фиг.1). Первый защитный обруч 2 расположен в горизонтальной плоскости, проходящей через продольную ось центрального связующего узла 4. Второй защитный обруч 3 расположен в вертикальной плоскости, также проходящей через продольную ось центрального связующего узла 4. Первый 2 и второй 3 защитные обручи жестко скреплены друг с другом в двух точках пересечения.
Крылья 6 БЛА выполнены из прочной синтетической ткани, например, лавсана. Каждое крыло 6 представляет собой полоску прочной ткани, один край которой крепится к соответствующей боковой стороне центрального связующего узла 4, а другой натягивается на противоположный сегмент первого защитного обруча 2, загибается и подшивается к изнаночной части того же крыла 6. Места такой подшивки показаны точечными линиями на фиг.1 (вид сверху). За счет упругости первого защитного обруча 2 ткань крыльев 6 всегда находится в натянутом состоянии.
Верхняя и нижняя точки первого защитного обруча 2 соединены с центральным связующим узлом 4 растяжками 7, выполненными, например, в виде штырей из углепластиковой трубки или натянутых (за счет упругости второго защитного обруча 3) прочных упругих тросов из синтетического материала (например, лавсана). Растяжки 7 расположены на одной оси с поперечной осью центрального связующего узла 4, проходящей в вертикальной плоскости через его центр масс.
В варианте конструкции, показанном на фиг.2, первый 2 и второй 3 защитные обручи дополнены несколькими идентичными дополнительными защитными обручами 8. Каждый дополнительный защитный обруч 8 располагается, как и второй защитный обруч 3, в вертикальной плоскости. Но плоскости расположения каждого из дополнительных защитных обручей 8 повернуты вокруг поперечной оси центрального связующего узла 4 на некоторый угол относительно той плоскости, в которой расположен второй защитный обруч 3. Каждый дополнительный защитный обруч 8 жестко скреплен с первым 2 и вторым 3 защитными обручами в точках пересечения с ними.
Таким образом, конструкция БЛА обладает одновременно и жесткостью и упругостью. Жесткость всей конструкции БЛА - необходимое условие для осуществления устойчивого управляемого полета. Упругость - необходимое и достаточное условие для "смягчения" удара при посадке или при столкновении с посторонними предметами. Применение дополнительных защитных обручей 8 (фиг.2) повышает степень жесткости и упругости конструкции БЛА. Кроме того, уменьшается вероятность повреждения БЛА при столкновении с малоразмерным объектом на земле, при котором этот объект может проскочить мимо первого 2 и второго 3 защитных обручей и повредить центральный связующий узел 4. Очевидно, однако, что применение дополнительных защитных обручей 8 (фиг.2) утяжеляет БЛА и приводит к ухудшению его аэродинамических характеристик. Поэтому на практике выбор количества дополнительных защитных обручей 8 должен быть предметом разумного компромисса между летными характеристиками и безопасностью БЛА с учетом решаемых им задач.
Процедура посадки БЛА включает в себя также действия оператора по поиску приземлившегося и укатившегося в неизвестном направлении БЛА на земной поверхности. БЛА может закатиться под дерево либо застрять в густой траве и быть невидимым оператору.
Для ускорения поиска служит радиопоисковая аппаратура, которой оснащен оператор. Может быть использован, например, простейший пеленгатор, применяемый в известных соревнованиях "охоте на лис". Информация об указанной аппаратуре приведена, например, на сайте www.urfiwz.grz.ru.
Используемый в "охоте на лис" пеленгатор представляет собой радиоприемник 9 с антенной 10 пеленгатора и наушниками 11.
В рассматриваемом случае может быть использован простейший вариант построения носимого пеленгатора, показанный на фиг.3.
Путем поворота антенны 10 пеленгатора оператор может определить направление (азимут) на источник излучения, соответствующее максимуму громкости (или частоты повторения) прослушиваемых в наушниках сигналов. Расстояние до БЛА может быть также грубо оценено, например, по частоте прослушиваемых звуковых сигналов. Для более точных измерений может быть использован индикатор, например стрелочный указатель типа компаса.
Предлагаемый способ посадки описанного выше варианта сверхлегкого БЛА заключается в следующем.
После выполнения полетного задания БЛА выводят, например, по заранее заданной программе в район предполагаемой посадки, в котором находится оператор. В заданной точке двигательная установка, роль которой в рассматриваемом варианте построения БЛА играет управляемый импеллер 1, выключается. Под воздействием силы тяжести БЛА начинает быстро снижаться, сохраняя горизонтальную составляющую скорости движения, то есть падать вниз по некоторой наклонной траектории.
При касании земли происходит взаимодействие жестко скрепленных друг с другом первого 2 и второго 3 защитных обручей с земной поверхностью. Первый 2 и второй 3 защитные обручи прогибаются, в них возникает деформация, при которой первый 2 и второй 3 защитные обручи стремятся оттолкнуться от земной поверхности.
Горизонтальная составляющая скорости БЛА при контакте с земной поверхностью не изменяется. БЛА продолжает двигаться, однако, на нижнюю часть обручей начинает действовать тормозящая сила трения. Кроме того, на конструкцию БЛА действует и сила тяжести, направленная вертикально вниз. БЛА переходит в режим качения, то есть начинает катиться по поверхности земли, как мяч. При этом БЛА может несколько раз подпрыгнуть, а затем остановиться. Во время этого торможения БЛА, центральный связующий узел 4 (с жестко соединенными с ним управляемым импеллером 1 и отсеком 5 для полезной нагрузки) продолжает свое движение по инерции. Однако это движение тормозится силой упругости как крыльев 6, так и растяжек 7.
Не достигая первого 2 и второго 3 защитных обручей, центральный связующий узел 4 останавливается внутри конструкции БЛА. В это же время первый 2 и второй 3 защитные обручи отталкиваются от земли. Однако за счет движения центрального связующего узла 4 внутри конструкции БЛА отталкивание первого 2 и второго 3 защитных обручей от земли получается неупругим. Внутри БЛА центральный связующий узел 4 переходит в возвратно-поступательное движение с уменьшающейся амплитудой. Это движение обусловлено упругостью как крыльев 6, так и растяжек 7. В конце концов, БЛА останавливается, а возвратно-поступательное движение центрального связующего узла 4 внутри конструкции БЛА прекращается. В результате БЛА оказывается вблизи от точки первоначального контакта с поверхностью земли, а корпус центрального связующего узла 4 БЛА, управляемый импеллер 1, крылья 6 и аппаратура, находящаяся в отсеке 5 для полезной нагрузки центрального связующего узла 4, остаются неповрежденными. Это объясняется наличием упругих внутренних колебаний центрального связующего узла 4, приводящих к снижению результирующих перегрузок для полезной нагрузки БЛА.
В отличие от других известных способов посадки сверхлегких БЛА с нетрадиционными схемами построения (например, по патентам RU №2278801, В64С 29/02, В64С 25/40, В64F 1/18 и RU №2278060, В64F 1/02, В64F 1/18), в рассматриваемом способе на заключительном участке полета не требуется точного вывода БЛА в заданный район. Достаточно лишь выключить двигательную установку.
Это существенно упрощает всю процедуру посадки, однако требует принятия дополнительных мер для ускоренного нахождения БЛА на земле. В данном изобретении предлагается применить для поиска БЛА оператором процедуру радиопеленгации. Для этого до начала полета БЛА устанавливают на его борту, например, в отсеке 5 для полезной нагрузки, маячковый передатчик с датчиком удара.
Датчик удара срабатывает только при выключенном управляемом импеллере 1. Необходимость этого состоит в том, что в процессе выполнения полетного задания сверхлегкий БЛА может испытывать столкновения (например, со столбами, с деревьями или с поверхностью холма). Такие столкновения не являются опасными для полезной нагрузки БЛА. Удары от столкновения гасятся первым 2 и вторым 3 защитными обручами, упругими крыльями 6 и растяжками 7, а также дополнительными защитными обручами 8, если они входят в состав БЛА. После гашения энергии удара БЛА спокойно продолжает выполнение полетного задания. Однако при таких столкновениях включенный управляемый импеллер 1 запрещает срабатывание датчика удара и включение маячкового передатчика. Это необходимо для экономии энергии, вырабатываемой специальной батарейкой (аккумулятором) и потребляемой маячковым передатчиком.
При выключенном управляемом импеллере 1 датчик удара срабатывает после удара БЛА о земную поверхность. При этом автоматически включается маячковый передатчик, который начинает периодически посылать в эфир радиосигналы. Оператор, на которого возложена задача поиска и эвакуации БЛА из района посадки, оснащен (фиг.3) носимым пеленгатором - радиоприемником 9 с антенной 10 пеленгатора и наушниками 11. Эти устройства аналогичны пеленгатору, применяемому в известных соревнованиях "охоте на лис". Впрочем, тип пеленгатора для данного изобретения не играет существенной роли.
Радиоприемник 9 настроен на несущую частоту радиосигналов маячкового передатчика БЛА. При приеме этих радиосигналов (через антенну 10 пеленгатора) радиоприемник 9 преобразует их и передает в наушники 11 для формирования звуковых сигналов. При преобразовании радиосигналов радиоприемник 9 учитывает их интенсивность таким образом, что громкость (или частота повторения) сигналов в наушниках 11 пропорциональна интенсивности радиосигнала, принимаемого радиоприемником 9. То есть по типу сигналов в наушниках 11 оператор может судить о расстоянии до приземлившегося БЛА и о точности направления наведения на БЛА плоскости антенны 10 пеленгатора. Как показано на фиг.3, путем поворота плоскости антенны 10 пеленгатора и прослушивания звуковых сигналов в наушниках 11 оператор выходит на источник излучения и может достаточно быстро разыскать приземлившийся БЛА, например закатившийся под дерево.
Таким образом, нетрадиционная схема построения сверхлегкого БЛА и применение при поиске приземлившегося БЛА процедуры радиопеленгации позволяют решить поставленную задачу - максимально упростить реализацию процедуры посадки. Достаточно сказать, что для управления полетом БЛА на заключительном этапе не используется никаких других операций, кроме автоматического выключения двигательной установки, а на земле не требуется никаких посадочных и вспомогательных средств, кроме простейшего пеленгатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА ПРИЗЕМЛИВШЕГОСЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2546393C1 |
| СВЕРХЛЕГКИЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2293043C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| Приспособление для посадки беспилотного летательного аппарата и его фиксации | 2023 |
|
RU2801371C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2278060C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ РАКЕТНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2718560C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| СПОСОБ ЭКСТРЕННОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ ОБЪЕКТАМ СПАСЕНИЯ, ПОПАВШИМ В ЭКСТРЕМАЛЬНЫЕ УСЛОВИЯ И ТЕРПЯЩИМ БЕДСТВИЕ В УДАЛЕННЫХ БЕЗЛЮДНЫХ РАЙОНАХ ЗЕМНОГО ШАРА С НЕТОЧНО ИЗВЕСТНЫМИ КООРДИНАТАМИ И АЭРОБАЛЛИСТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2076759C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
Изобретение относится к способам посадки беспилотных летательных аппаратов (БЛА), в частности к способам посадки сверхлегких (массой не более одного килограмма) БЛА, оснащенных бортовыми электронными устройствами наблюдения, навигации и автоматического управления полетом. Согласно предложенному способу, до начала полета БЛА устанавливают на его борту маячковый передатчик с датчиком удара, выполненным с возможностью фиксации момента контакта БЛА с земной поверхностью при выключенной двигательной установке, и осуществляют горизонтальный полет БЛА над земной поверхностью. По заданной программе или путем дистанционного управления с земли выводят БЛА в район посадки. После вывода БЛА в район посадки выключают его двигательную установку и обеспечивают падение БЛА под воздействием силы тяжести. В момент контакта БЛА с земной поверхностью по сигналу от датчика удара активируют маячковый передатчик. Путем радиопеленгации маячкового передатчика определяют местоположение приземлившегося БЛА и осуществляют его розыск для последующей эвакуации. Максимально упрощенная процедура посадки БЛА по предложенному способу позволяет обойтись без сложной электронной бортовой аппаратуры наведения и размещаемых на местности посадочных оптических устройств. Технический результат заключается в возможности осуществления посадки БЛА практически на любые необорудованные участки земной поверхности. 1 з.п. ф-лы. 3 ил.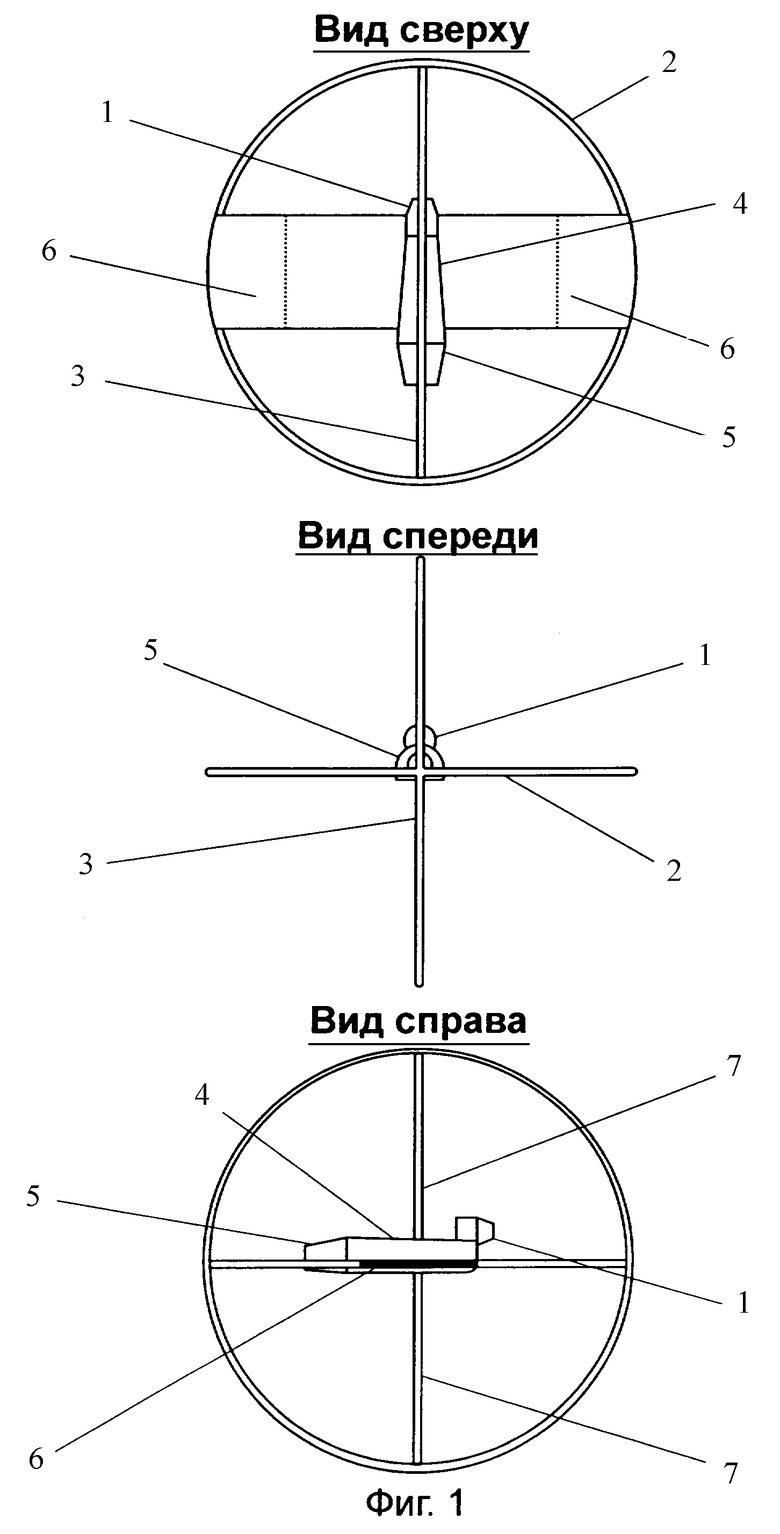
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| JP 2001354199, 25.12.2001 | |||
| АВТОЖИР-КОНВЕРТОПЛАН (ВЕРТОПЛАН) | 2002 |
|
RU2229421C2 |
| US 6089501 A, 18.07.2000. | |||

