Предлагаемая малогабаритная система относится к области видеонаблюдения и может быть использована для оперативного изучения окружающей обстановки в условиях ограниченных возможностей наблюдения из-за наличия естественных и искусственных препятствий, в частности горных структур, лесных массивов, карьеров, дамб и т.д. При этом предлагаемая малогабаритная система видеонаблюдения может быть использована для решения следующих задач:
- оперативная рекогносцировка на незнакомой местности, в частности обнаружение засады при движении колонны в опасных местах;
- обнаружение естественных и искусственных образований (водоемы, постройки, карьеры и т.п.) в непосредственной близости от места дислокации;
- обнаружение брошенной, угнанной или замаскированной техники (автомобили и т.п.);
- обнаружение пропавших туристов, угнанных животных (например, отара овец или стадо крупного рогатого скота) и т.п.
В настоящее время для решения разнообразных задач наблюдения земной поверхности известны способы, системы и устройства для видеонаблюдения за наземной обстановкой, а именно:
- патент РФ RU 2.279.999 С2, B64D 47/08, опубликован 20.07.2006;
- патент РФ RU 2.272.753 С2, В64С 39/02, опубликован 27.03.2006;
- патент РФ RU 2.248.307 C1, B64C 29/00, G08C 21/00, опубликован 20.03.2005;
- патент США US 6.712.312 ВА, В64С 33/02, опубликован 30.03.2004;
- патент США US 5.575.438 A, B64D 47/00, опубликован 19.11.1994;
- патент Франции FR 02.707.386 A1, F41H 13/00, В64С 39/10, В64С 39/02, B64D 47/00, опубликован 13.01.1995;
- патент ЕПВ ЕР 1.391.681 A1, F41G 3/02, опубликован 25.02.2004;
- РОСТИЧ Р. Разработка в США перспективных беспилотных летательных аппаратов для ВМС // Зарубежное военное обозрение. 2003, № 7, с.61-63.
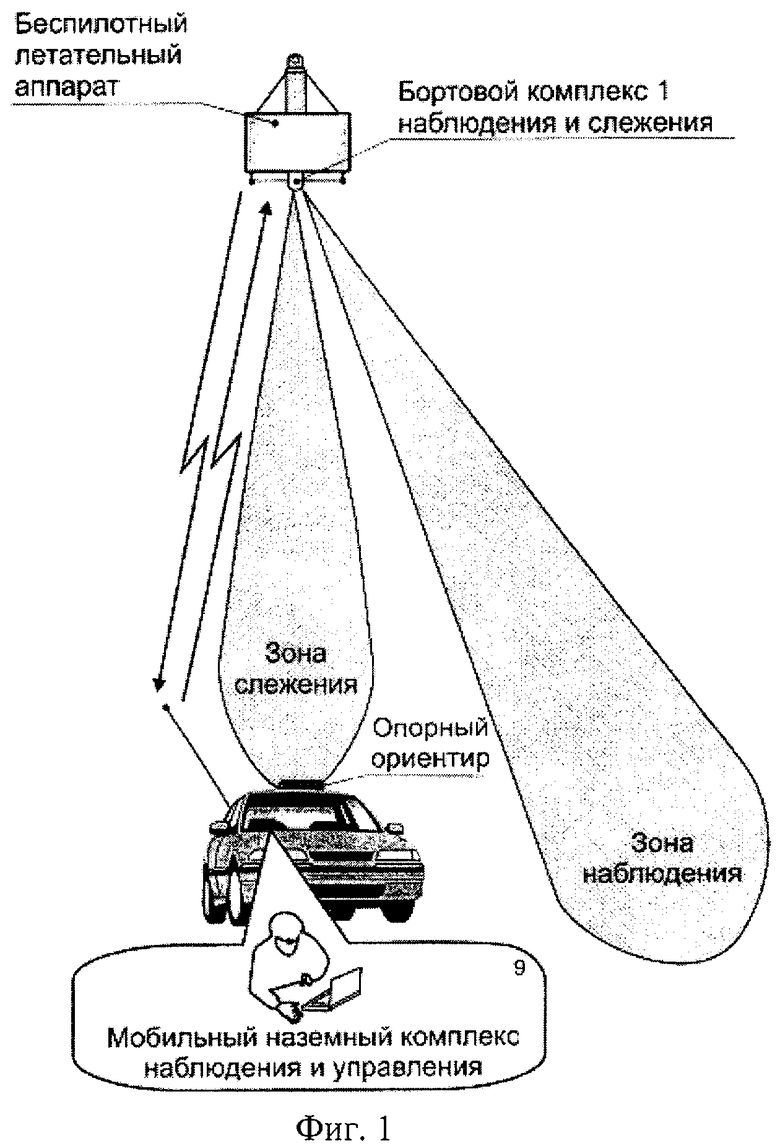
Из известных систем и устройств для видеонаблюдения земной поверхности наиболее близким решением к предлагаемой системе является «Система наблюдения за наземной обстановкой» (патент РФ RU 2.248.307 С1, B64C 29/00, G08C 21/00, опубликован 20.03.2005), выбранная в качестве базового объекта.
Базовая система-прототип относится к системам, использующим беспилотные летательные аппараты (БЛА) для наблюдения с воздуха за участками местности и объектами на ней и передачи видеоизображений земной поверхности и объектов на мобильный наземный комплекс наблюдения и управления (наземный терминал).
Для передачи сигналов изображения участков местности и объектов в поле зрения аппаратуры наблюдения на БЛА установлен бортовой комплекс наблюдения и слежения, включающий в себя камеры наблюдения и слежения, аналого-цифровой преобразователь, бортовое форматирующее устройство, блок сжатия данных и передатчик изображений (передатчик информационного сигнала), обеспечивающий передачу информационного сигнала по радиоканалу на мобильный наземный комплекс наблюдения и управления.
Кроме того, бортовой комплекс наблюдения и слежения содержит высотомер, бесплатформенный инерциальный блок, два блока памяти, корреляционное устройство, микропроцессор, блок рулевых машинок и исполнительные устройства. При этом корреляционное устройство обеспечивает формирования сигнала корреляционной функции двух изображений, поступающих из блоков памяти, и подачи этого сигнала на один из входов микропроцессора, который преобразует указанный сигнал корреляционной функции в команды управления блоком рулевых машинок БЛА.
В мобильном наземном комплексе наблюдения и управления имеются приемник изображений, обеспечивающий прием по радиоканалу информационных сигналов изображения от передатчика изображений, и портативный персональный компьютер, предназначенный для отображения получаемых изображений местности и объектов, находящихся в поле зрения аппаратуры наблюдения.
Кроме того, мобильный наземный комплекс наблюдения и управления содержит передатчик, обеспечивающий передачу по радиоканалу сигналов управления (команд) полетом БЛА и ориентацией его в пространстве на приемник команд, расположенный на борту БЛА, а также формирователь кадра.
Технический результат от применения прототипа выражается в упрощении системы, снижении габаритов бортовой аппаратуры БЛА и наземной части, а также в повышении удобства применения.
Схема, отображающая структуру и принцип применения базовой системы-прототипа, изображена на фигуре 1.
Базовая система-прототип работает следующим образом.
После запуска БЛА путем передачи сигналов управления (команд), формируемых в мобильном наземном комплексе наблюдения и управления и передаваемых по радиоканалу с помощью передатчика команд на приемник команд, находящийся на борту БЛА, выводится оператором в район применения (в район расположения интересующих объектов). В районе применения БЛА управляется сигналами управления, которые вырабатываются с помощью корреляционного устройства и микропроцессора и подаются в блок рулевых машинок БЛА. В процессе полета БЛА в районе применения с помощью бортового комплекса наблюдения и слежения, содержащего камеры наблюдения и слежения, формируются изображения участков местности и объектов в поле зрения аппаратуры наблюдения. Полученные изображения преобразуются в информационные сигналы, которые с помощью передатчика информационного сигнала передаются по радиоканалу на мобильный наземный комплекс наблюдения и управления. Оператор мобильного наземного комплекса наблюдения и управления имеет возможность наблюдать получаемое изображение на экране монитора портативного персонального компьютера. Изображение объекта передается с борта дистанционно управляемого БЛА в текущем времени.
Описанная базовая система-прототип предназначена для применения на оперативно-тактическом уровне и характеризуется таким применением БЛА, когда носитель аппаратуры наблюдения может преодолевать десятки и даже сотни километров до объектов наблюдения. Кроме того, БЛА может обеспечить длительное время наблюдения, определяемое его тактико-техническими характеристиками. В таких условиях достигаемый эффект (результативность системы наблюдения) оправдывает затраты на запуск БЛА, его управление, стоимость самого БЛА и обеспечивает должный уровень критерия «Эффективность-стоимость». Вместе с тем применение подобной системы наблюдения за участками местности и объектами на тактическом уровне совершенно неэффективно. Дело в том, что решение задач небольшой подвижной группой, как правило, проводится на участках местности размерами от сотен метров до одного-двух километров. В таких условиях запускать БЛА, выводить его на малый участок местности, который БЛА будет пролетать очень быстро, возвращать обратно и многократно повторять указанные операции неэффективно, особенно с точки зрения затрат времени на проведение операции по рекогносцировке. Кроме того, существующие БЛА, в том числе БЛА в системе-прототипе, являются громоздкими для транспортировки малочисленной мобильной группой и дорогими системами с точки зрения тактического уровня применения.
Для устранения указанных недостатков системы-прототипа предлагается малогабаритная система видеонаблюдения за наземной обстановкой.
Предлагаемая малогабаритная система видеонаблюдения за наземной обстановкой включает в свой состав малогабаритную неуправляемую нестабилизированную платформу, механически соединенную с парашютом, бортовой комплекс наблюдения, включающий в себя камеру наблюдения, аналого-цифровой преобразователь, бортовое форматирующее устройство, блок сжатия данных (оптико-электронный блок) и тракт передачи изображений (информационного сигнала), обеспечивающий передачу информационного сигнала по радиоканалу на наземный мобильный комплекс наблюдения. Кроме того, предлагаемая малогабаритная система видеонаблюдения имеет мобильный наземный комплекс наблюдения (наземный терминал), содержащий тракт приема изображений, обеспечивающий прием по радиоканалу информационных сигналов изображения от передатчика изображений, и портативный персональный компьютер, предназначенный для отображения получаемых изображений местности и объектов, находящихся в поле зрения аппаратуры наблюдения.
Тракт передачи изображений (информационного сигнала) содержит последовательно соединенные помехоустойчивый кодер, блок расширения спектра информационных сигналов, фазовый модулятор, собственно передатчик и передающую антенну. Помехоустойчивый кодер и блок расширения спектра передаваемого сигнала в совокупности обеспечивают требуемое качество передачи изображений (информационного сигнала). Действительно, использование в радиолинии помехоустойчивого кодирования позволяет на приемной стороне обнаруживать и исправлять определенное число ошибок, которые могут иметь место при передаче сигналов по радиоканалу. Число обнаруживаемых и исправляемых ошибок определяется типом и параметрами используемого помехоустойчивого кода. Процедура расширения спектра передаваемого сигнала (формирование сложного сигнала) в совокупности с оптимальным приемом с помощью согласованного фильтра в наземном терминале обеспечивают улучшение отношения сигнал/шум и тем самым повышение качества передачи сигналов. Применение мер для повышения помехозащищенности радиолинии в предлагаемой малогабаритной системе видеонаблюдения за наземной обстановкой имеет принципиальный характер в силу следующих факторов:
- значительное уменьшение амплитуды передаваемого сигнала, которое может иметь место в радиолинии при работе с подвижными нестабилизированными объектами;
- низкая мощность передатчика, расположенного на малогабаритной платформе, где сложно обеспечить сколько-нибудь значительную мощность источника питания.
Тракт приема информационного сигнала в наземном терминале содержит приемную антенну, радиоприемник, согласованный фильтр, в котором осуществляется сжатие сложного сигнала и тем самым улучшение отношения сигнал/шум, декодер помехоустойчивого кода, блок формирования видеосигнала изображения, который поступает на монитор для восстановления изображения, получаемого в бортовом комплексе наблюдения.
Технический результат от применения предлагаемой малогабаритной системы оперативного видеонаблюдения за наземной обстановкой выражается в повышении оперативности (сокращении времени) проведения операции рекогносцировки на местности, снижении массогабаритных характеристик бортовой аппаратуры, в повышении удобства применения системы, а также в существенном снижении стоимости данной системы применительно к решаемому уровню задач. Предлагаемая малогабаритная система оперативного видеонаблюдения за наземной обстановкой является на сегодняшний день единственным вариантом решения задач подобного уровня.
Структурные схемы бортового комплекса наблюдения и приемного тракта наземного терминала предлагаемой малогабаритной системы видеонаблюдения за наземной обстановкой представлены на фиг.2.
На фигуре 2 приняты следующие обозначения:
- 1 - камера наблюдения;
- 2 - аналого-цифровой преобразователь;
- 3 - бортовое форматирующее устройство;
- 4 - блок сжатия данных;
- 5 - помехоустойчивый кодер;
- 6 - блок расширения спектра;
- 7 - фазовый модулятор;
- 8 - передатчик, подключенный к передающей антенне;
- 9 - радиоприемник с приемной антенной;
- 10 - согласованный фильтр для фазоманипулированного сигнала;
- 11 - декодер помехоустойчивого кода;
- 12 - блок формирования видеосигнала изображения;
- 13 - монитор (ПЭВМ).
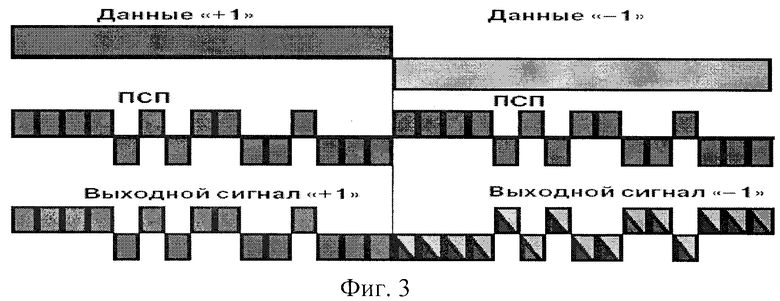
Принцип расширения спектра информационного сигнала (сигнала изображения) представлен на фиг.3.
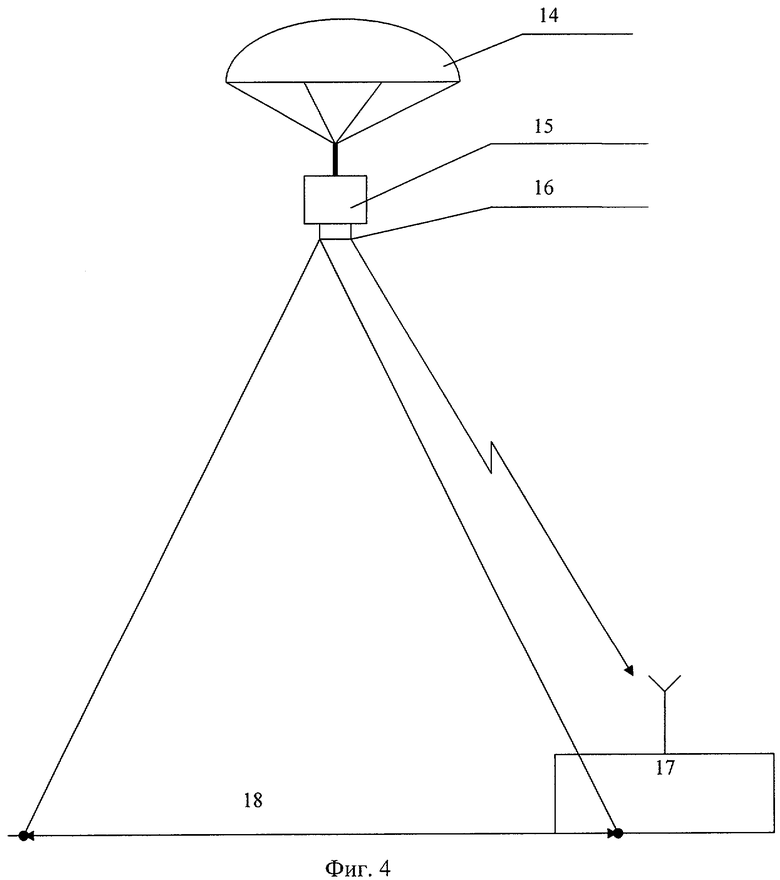
Схема, отображающая структуру и принцип применения предлагаемой малогабаритной системы видеонаблюдения за наземной обстановкой, изображена на фиг.4, где приняты следующие обозначения:
- 14 - парашют;
- 15 - малогабаритная неуправляемая нестабилизированная платформа;
- 16 - камера;
- 17 - мобильный наземный комплекс наблюдения (наземный терминал);
- 18 - зона наблюдения.
Бортовой комплекс наблюдения предлагаемой малогабаритной системы видеонаблюдения за наземной обстановкой содержит последовательно соединенные камеру наблюдения 1, аналого-цифровой преобразователь 2, бортовое форматирующее устройство 3, блок сжатия данных 4, помехоустойчивый кодер 5, блок расширения спектра 6, фазовый модулятор 7 и передатчик 8, выход которого подключен к передающей антенне.
В свою очередь, приемный тракт наземного терминала предлагаемой малогабаритной системы видеонаблюдения за наземной обстановкой содержит последовательно включенные приемную антенну, радиоприемник 9, согласованный фильтр 10, декодер помехоустойчивого кода 11, блок формирования видеосигнала изображения 12 и монитор 13.
В таком составе радиолиния передачи изображений с малогабаритной платформы на наземный терминал обеспечивает качество передачи изображений не хуже, чем в прототипе, в условиях подвижной нестабилизированной платформы и низкого энергообеспечения системы.
В состав предлагаемой малогабаритной системы видеонаблюдения входят следующие основные элементы (фиг.4).
Парашют 14 механически соединяется с малогабаритной неуправляемой (нестабилизированной) платформой 15, на которой размещается бортовой комплекс наблюдения, включающий камеру 16 и передающий тракт.
Мобильный наземный комплекс наблюдения (наземный терминал) 17 содержит тракт приема сигналов изображения, обеспечивающий прием по радиоканалу информационных сигналов изображения от передатчика изображений, и портативный персональный компьютер, предназначенный для отображения на мониторе получаемых изображений местности (зона наблюдения) 18 и объектов.
Предлагаемая малогабаритная система видеонаблюдения за наземной обстановкой функционирует следующим образом.
Малогабаритная неуправляемая нестабилизированная платформа с бортовым комплексом наблюдения и передающим трактом 15 с помощью порохового заряда и пускового устройства (по аналогии с осветительными ракетами) выводится на требуемую высоту (например, на высоту 200 м). На заданной высоте раскрывается парашютное устройство 14, и малогабаритная неуправляемая нестабилизированная платформа 15 начинает плавный спуск (например, со скоростью 0,5 м/с), что обеспечивает зависание платформы над исследуемой местностью (зона наблюдения) 18. Так, например, при скорости снижения 0,5 м/с снижение с высоты 200 м до высоты 150 м происходит за 100 с. Указанного времени вполне достаточно для формирования устойчивого изображения камерой 16, его обработки и регистрации на наземном терминале 17 для последующего изучения и анализа оператором.
В зависимости от задач и местных условий запуск малогабаритной неуправляемой платформы можно осуществлять с выносом вправо (влево), вперед, вправо вперед (влево вперед) по ходу движения или по месту дислокации (фиг.4).
После вывода платформы и ее зависания включается бортовой комплекс наблюдения и передающий тракт. При этом изображение местности в пространстве оптической системы камеры наблюдения 16 преобразуется в электрические сигналы в цифровом виде (блоки 1 и 2), которые подвергаются форматированию с целью формирования цифрового потока изображения (блок 3) и дополнительной обработке с целью сокращения избыточности представления данных (сжатие данных) (блок 4).
Подготовленный для передачи цифровой сигнал изображения с выхода блока сжатия данных подвергается помехоустойчивому кодированию (блок 5) и расширению спектра (блок 6). При этом для расширения спектра передаваемого сигнала используется процедура перемножения информационных символов (сигналы изображения) и символов псевдослучайной последовательности при мультипликативном представлении символов (х∈{1,-1}), (фиг.3) или процедура сложения по модулю два при аддитивном представлении символов (х∈{0,1}). Для иллюстрации на фиг.3 представлена процедура расширения спектра данных (х∈{1,-1}) с помощью линейной рекуррентной последовательности максимальной длины (М-последовательность) с формирующим полиномом А(Х)=X4+X1+1 и длиной N=15. Расширение спектра информационных сигналов позволяет сформировать несущие сигналы с большой базой, равной длине N расширяющей псевдослучайной последовательности.
Цифровой информационный поток с выхода блока расширения спектра подается в фазовый модулятор с целью переноса спектра цифрового сигнала на радиочастоту (несущую частоту), откуда поступает в передатчик и излучается передающей антенной.
На приемной стороне радиолинии происходит прием и усиление радиосигналов в радиоприемнике (блок 9), выделение символов информационного сообщения (изображения) с помощью согласованного фильтра 10, декодирование помехоустойчивого кода с целью обнаружения и исправления ошибок (блок 11), формирование сигналов изображения (процедура, обратная процедуре сжатия данных) (блок 12) и отображение на мониторе (блок 13).
Параметры радиолинии, мощность излучения, вид и параметры помехоустойчивого кода, вид и параметры расширяющей псевдослучайной последовательности выбираются и обосновываются на этапе разработки и создания малогабаритной системы видеонаблюдения. При этом наличие блока прямого расширения спектра и согласованного фильтра является принципиальным отличием предлагаемой системы от базовой системы-прототипа.
Указанное обстоятельство обусловлено необходимостью обеспечения требуемого качества передачи изображения в условиях ограниченного энергообеспечения и возможного резкого уменьшения амплитуды радиосигналов. Ограниченное энергообеспечение и возможность резкого уменьшения амплитуды радиосигналов являются следствием перехода к малогабаритной нестабилизированной платформе. Вместе с тем применение несущих сигналов с большой базой, равной длине N расширяющей последовательности, за счет расширения спектра информационных сигналов обеспечивает на выходе согласованного фильтра улучшение отношения сигнал/шум в 2·N раз (при когерентной согласованной фильтрации) и в N раз - при некогерентной согласованной фильтрации. Указанное обстоятельство является важнейшим инструментом обеспечения требуемого качества передачи изображений.
Таким образом, предлагаемая малогабаритная система видеонаблюдения за наземной обстановкой по сравнению с базовой системой-прототипом и другими аналогичными системами применительно к ситуациям тактического уровня существенно сокращает время рекогносцировки (в некоторых ситуациях временной фактор может быть чрезвычайно критичным), упрощает процедуру управления системой видеонаблюдения, существенно уменьшает массогабаритные характеристики несущей платформы, а также имеет значительно меньшую стоимость и при этом сохраняет качество передачи изображений.
Технический результат от применения предлагаемой малогабаритной системы видеонаблюдения за наземной обстановкой выражается в существенном сокращении времени рекогносцировки, упрощении процедуры управления системой видеонаблюдения, уменьшении массогабаритных характеристик несущей платформы при сохранении качества передачи изображений, а также в существенном снижении стоимости данной системы применительно к решаемому уровню задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАГОРИЗОНТНОГО ЦЕЛЕУКАЗАНИЯ И ВИДЕОНАБЛЮДЕНИЯ | 2014 |
|
RU2578494C1 |
| СПУСКАЕМЫЙ РАЗВЕДЫВАТЕЛЬНЫЙ МОДУЛЬ "СВЕТЛЯЧОК" | 2013 |
|
RU2543084C2 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВОЗДУШНОГО МОНИТОРИНГА | 2015 |
|
RU2612754C1 |
| Роботизированный поиск источников ионизирующего излучения на местности | 2023 |
|
RU2836638C1 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
Изобретение относится к технике видеонаблюдения и может быть использовано для оперативного изучения окружающей обстановки в условиях ограниченных возможностей наблюдения из-за наличия естественных и искусственных препятствий. Система видеонаблюдения за наземной обстановкой содержит связанную с парашютом малогабаритную неуправляемую нестабилизированную платформу для размещения бортового комплекса наблюдения. Последний включает в себя последовательно соединенные бортовую камеру наблюдения, аналого-цифровой преобразователь, бортовое форматирующее устройство, блок сжатия данных, помехоустойчивый кодер, блок расширения спектра, фазовый модулятор и передатчик с передающей антенной. Наземный комплекс включает в себя последовательно соединенные радиоприемник с приемной антенной, согласованный фильтр, декодер помехоустойчивого кода, блок формирования видеосигнала изображения и монитор. Изобретение позволяет сократить время рекогносцировки, упростить процедуру управления системой видеонаблюдения и уменьшить массогабаритные характеристики несущей платформы при сохранении качества передачи изображений. 4 ил.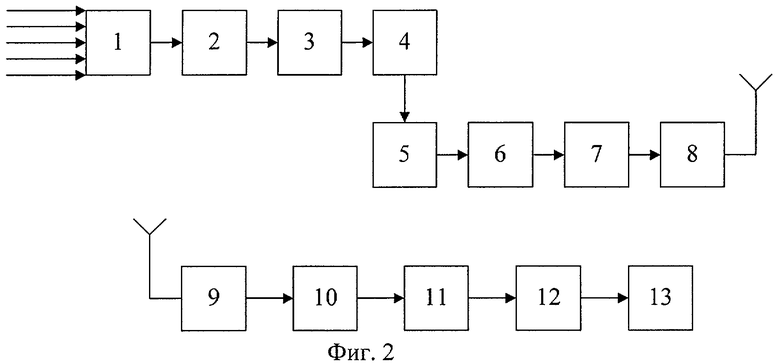
Малогабаритная система видеонаблюдения за наземной обстановкой, содержащая последовательно соединенные бортовую камеру наблюдения, аналого-цифровой преобразователь, бортовое форматирующее устройство и блок сжатия данных, последовательно соединенные бортовой передатчик и передающую антенну, а также последовательно соединенные приемную антенну и радиоприемник и последовательно соединенные блок формирования видеосигнала изображения и монитор, отличающаяся тем, что в нее введены парашют, малогабаритная неуправляемая нестабилизированная платформа для размещения бортового комплекса наблюдения, последовательно соединенные помехоустойчивый кодер, блок расширения спектра и фазовый модулятор, а также последовательно соединенные согласованный фильтр и декодер помехоустойчивого кода, при этом малогабаритная неуправляемая нестабилизированная платформа механически соединена с парашютом, выход блока сжатия данных подключен к входу помехоустойчивого кодера, выход фазового модулятора соединен с входом передатчика, выход радиоприемника подключен к входу согласованного фильтра, а выход декодера помехоустойчивого кода соединен с входом блока формирования видеосигнала изображения.
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| FR 2843848 А1, 27.02.2004 | |||
| US 2002166442 А1, 14.11.2002 | |||
| US 3866858 A, 18.02.1975. | |||

