Область техники, к которой относится изобретение
Настоящее изобретение относится в общем к автоматическим системам безопасности (АСБ), в частности, к аппаратам, способам и промышленным изделиям для испытания электромагнитных клапанов АСБ.
Уровень техники
Системы управления технологическими процессами, например, использующиеся в химических, нефтеперерабатывающих или других процессах, обычно имеют один или несколько централизованных технологических контроллеров, соединенных коммуникационными линиями с по меньшей мере одной главной или операторской рабочей станцией и одним или несколькими полевыми устройствами при помощи аналоговых, цифровых и/или комбинированных аналоговых/цифровых шин. Эти полевые устройства, которые могут представлять собой, например, клапаны, механизмы позиционирования клапанов, коммутаторы и/или преобразователи (например, датчики температуры, давления и расхода), выполняют технологические функции, такие как открывание и закрывание клапанов и/или измерение параметров процесса. Такие технологические контроллеры принимают сигналы, свидетельствующие о технологических измерениях, выполненных полевыми устройствами и/или другую информацию о полевых устройствах, используют эту информацию для выполнения управляющих программ, а затем генерируют управляющие сигналы, передаваемые по шинам и/или другим коммуникационным каналам на полевые устройства для управления протеканием процесса. Информация от полевых устройств и контроллеров может передаваться одному или нескольким приложениям, исполняемым оператором рабочей станции, с тем, чтобы дать возможность оператору выполнять желаемые функции в отношении процесса, такие как просмотр текущего состояния процесса, изменение протекания процесса и т.п.
Многие системы управления технологическими процессами также имеют одну или несколько станций приложений. Обычно эти станции приложений создают с использованием персонального компьютера, рабочей станции и т.п., соединенных коммуникационными линиями с контроллерами, операторскими рабочими станциями и другими системами внутри системы управления технологическим процессом посредством локальной сети (LAN). Каждая станция приложений может исполнять одно или несколько программных приложений, выполняющих функции управления кампаниями, управления поддержкой, виртуального контроля, диагностики, мониторинга в реальном времени, функций, связанных с безопасностью, функций конфигурирования и т.п. внутри системы управления технологическим процессом.
Некоторые системы управления технологическими процессами или их части могут представлять существенные риски с точки зрения безопасности. Например, химические предприятия, электростанции и т.п. могут использовать критические процессы, которые при отсутствии надлежащего управления ими и/или быстрого их отключения с использованием заранее определенной последовательности отключения, могут нанести существенный вред людям, окружающей среде и/или оборудованию. Для борьбы с рисками для безопасности, связанными с системами управления технологическими процессами, имеющими такие критические процессы, многие поставщики систем управления технологическими процессами предлагают продукцию, соответствующую нормам безопасности, таким как, например, стандарты Международной Электротехнической Комиссии (МЭК) (International Electrotechnical Commission (IEC)) 61508 и IEC 61511.
Системы управления технологическими процессами, соответствующие одному или нескольким известным стандартам безопасности, обычно внедряют с использованием архитектуры АСБ. В архитектурах АСБ контроллеры и полевые устройства, связанные с базовой системой управления технологическим процессом, отвечающей за непрерывное управление всем процессом, физически и логически отделены от других специальных полевых устройств и других специальных элементов управления, связанных с АСБ, отвечающей за выполнение автоматических функций безопасности, обеспечивающих безопасное отключение процесса при возникновении условий управления, представляющих существенный риск для безопасности. В частности, для обеспечения соответствия многим известным стандартам безопасности необходимо, чтобы базовая система управления технологическим процессом была оснащена специальными элементами управления, такими как логические решающие устройства, контроллеры АСБ, сертифицированные полевые устройства безопасности (например, датчики, конечные элементы управления, такие как, например, клапаны с пневматическим приводом и/или электромагнитные клапаны), устройства и программы обеспечения избыточности данных (например, избыточные связи, периодические проверки избыточности и т.п.), а также сертифицированное с точки зрения безопасности программное обеспечение или коды (например, сертифицированные приложения, функциональные модули, функциональные блоки и т.д.).
Некоторые технологические установки, кроме клапанов управления процессом, имеют также отсечной клапан безопасности (например, аварийный отсечной клапан) для каждого клапана управления процессом с целью быстрого перекрывания потока текучей среды в случае, например, аварии в системе. Эти отсечные клапаны безопасности управляются АСБ. Примером отсечного клапана безопасности является электромагнитный клапан, в котором АСБ выбирает электропитание обмотки для управления электромагнитным клапаном или регулирует его. При подаче питания на соленоид электромагнитного клапана он и, следовательно, весь электромагнитный клапан переходит в первое положение или состояние (например, "Открыто"). При отключении питания на соленоид электромагнитного клапана он и, следовательно, весь электромагнитный клапан переходит во второе положение или состояние (например, "Закрыто"). Электромагнитные клапаны обычно бывают двух типов: нормально открытые, которые при отключенном питании на соленоид находятся в положении "Открыто", и нормально закрытые, которые при отключенном питании на соленоид находятся в положении "Закрыто". Примерами таких электромагнитных клапанов являются электромагнитные клапаны EF8316 и EF8310 производства Asco® Valve, Inc.
Раскрытие изобретения
Здесь раскрыты варианты осуществления способа, аппарата и промышленным изделиям для испытания соленоидов автоматических систем безопасности. Раскрываемый аппарат управления положением клапана содержит реле для управления состоянием соленоида и механизм позиционирования клапана, включающий передатчик для передачи тестового сигнала соленоида на реле, электрические контакты для коммуникационной передачи тестового сигнала соленоида на реле по одному или нескольким проводам, тестер соленоида для генерации тестового сигнала соленоида и отслеживания отклика соленоида, когда тестовый сигнал соленоида подается на реле для проверки работы соленоида.
Вариант осуществлении способа включает выбор управляющего сигнала на отключение электропитания для выбора состояния соленоида автоматической системы безопасности (АСБ), передачу управляющего сигнала на отключение электропитания от контроллера клапана на реле по одному или нескольким проводам для перевода соленоида АСБ в выбранное состояние и отслеживания отклика соленоида АСБ в выбранном состоянии для проверки работы соленоида АСБ.
Краткое описание чертежей
ФИГ. 1 представляет собой схематическую иллюстрацию примера системы управления технологическим процессом, имеющей механизм позиционирования клапана в соответствии с одним или несколькими аспектами настоящего раскрытия.
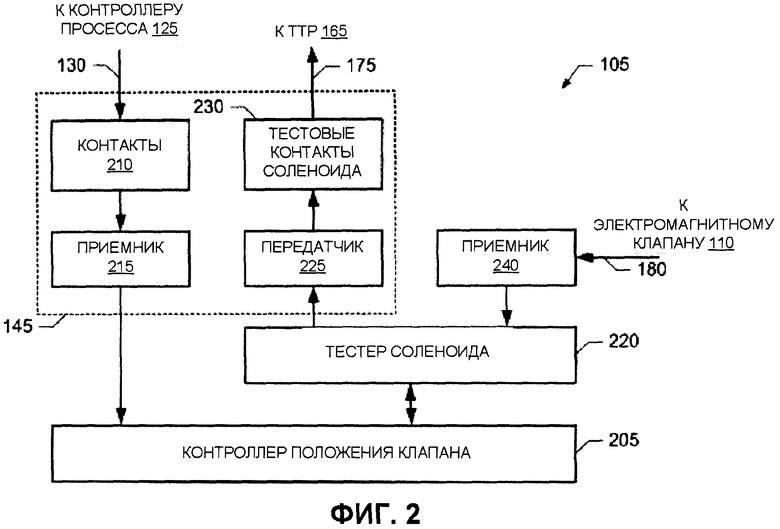
ФИГ. 2 иллюстрирует пример способа исполнения примера механизма позиционирования клапана по ФИГ. 1.
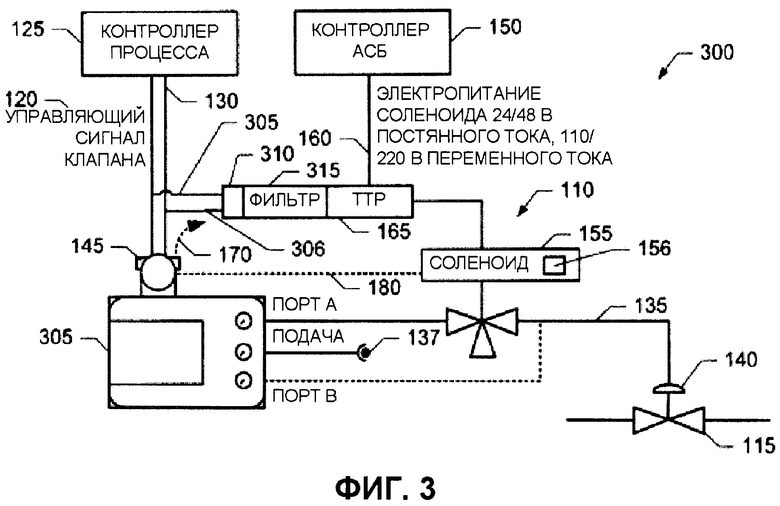
ФИГ. 3 представляет собой схематическую иллюстрацию другого примера системы управления технологическим процессом, имеющей механизм позиционирования клапана в соответствии с одним или несколькими аспектами настоящего раскрытия.
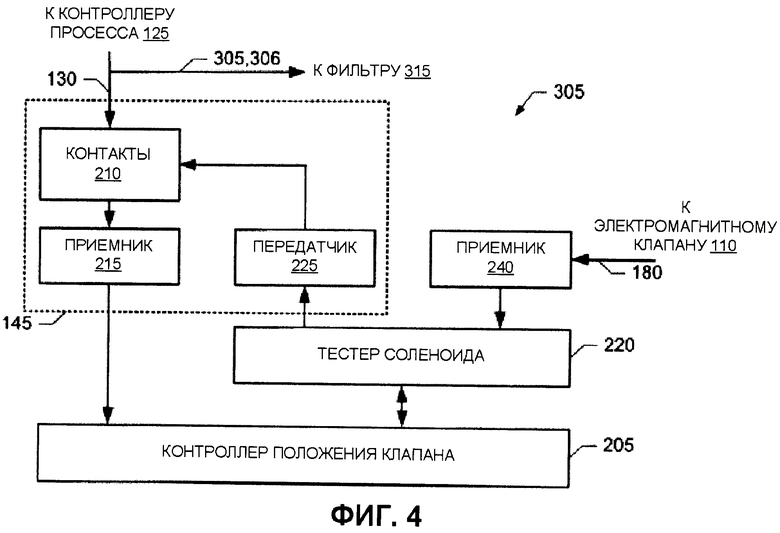
ФИГ. 4 иллюстрирует пример способа исполнения примера механизма позиционирования клапана по ФИГ. 3.
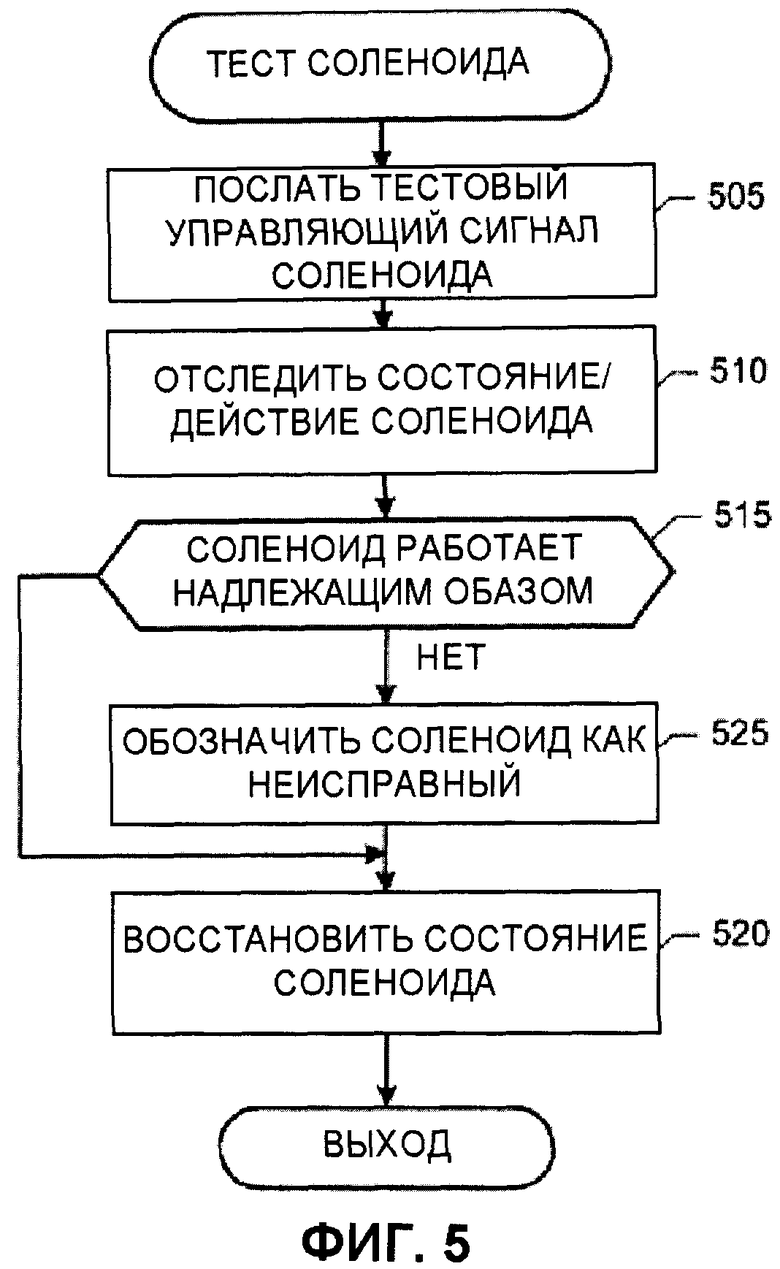
ФИГ. 5 представлена как блок-схема, представляющая пример выполнения способа, который можно провести для применения варианта осуществления механизма позиционирования клапана по ФИГ. 1-4.
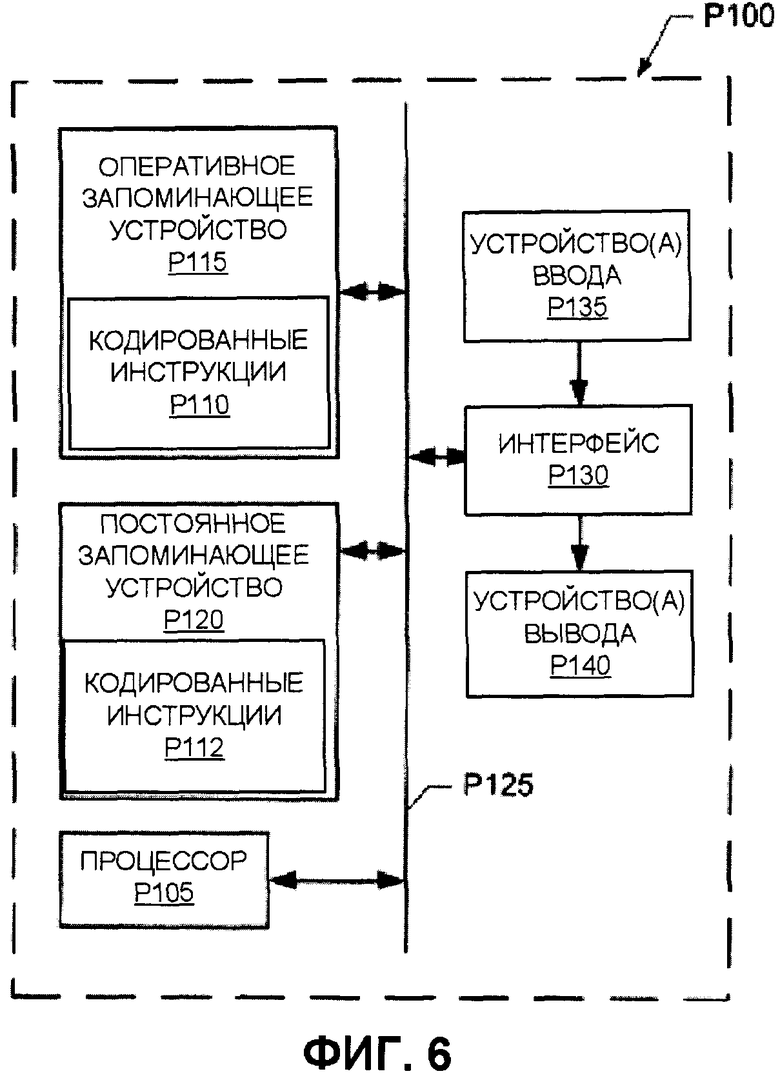
ФИГ. 6 представляет собой схематическую иллюстрацию варианта осуществления процессорной платформы, которую можно использовать и/или программировать для реализации примера процесса по ФИГ. 5 и/или реализации любого или всех раскрываемых здесь способов, аппарата и промышленных изделий.
Некоторые примеры показаны на упомянутых выше фигурах и подробно описаны далее. Фигуры не обязательно представлены в масштабе, и некоторые элементы и виды на фигурах могут быть показаны в увеличенном масштабе или схематично для ясности и/или выразительности. Следует понимать, что, хотя приведенное ниже описание изобретения обеспечивает множество различных воплощений или примеров внедрения различных особенностей разных воплощений, другие воплощения также возможны, и/или могут быть внесены структурные изменения, которые не следует воспринимать как выход за рамки сферы действия настоящего раскрытия. Кроме того, хотя далее приведены конкретные примеры описания компонентов и схем, они, разумеется, являются просто примерами и не подразумевают ограничения. Кроме того, в описании раскрытия условные номера или буквы в различных примерах могут повторяться. Такое повторение сделано с целью упрощения понимания и само по себе не определяет связей между различными воплощениями и/или обсуждаемыми примерами конфигураций. Кроме того, изображение или описание первого элемента над или на втором элементе может включать варианты воплощения, в которых первый и второй элементы находятся в непосредственном контакте, и может также включать варианты воплощения, в которых другие элементы находятся между первым и вторым элементами, так, что первый и второй элементы не могут находиться в непосредственном контакте.
Осуществление изобретения
Традиционно контроллеры автоматических систем безопасности (АСБ) тестируют работоспособность байпасирования/блокировки безопасности клапанов управления процессом путем кратковременного прерывания сигнала электропитания электромагнитного клапана. Такое временное прерывание сигнала электропитания электромагнитного клапана должно вызвать перемещение его запирающего элемента и заставить соответствующий клапан управления процессом начать движение в сторону положения безопасности (аварийного положения) (например, полностью "Закрыто" или полностью "Открыто", в зависимости от процесса). Если сигнал электропитания прерывается лишь на короткое время, клапан управления процессом отрабатывает лишь часть хода или частично перемещается в сторону положения безопасности или аварийного положения. Если будет выявлено, что клапан управления процессом движется в правильном направлении в ответ на кратковременное прерывание сигнала электропитания, контроллер АСБ может определить, что электромагнитный клапан и клапан управления процессом совместно работают надлежащим образом. В то же время, если будет выявлено, что клапан управления процессом не движется в надлежащем направлении, такой пример контроллера АСБ не сможет определить, какой именно клапан (электромагнитный или клапан управления процессом) работает неправильно. Такой вид проверки клапана управления процессом данным примером контроллера АСБ в отрасли часто называют "тестом частичного хода"(ТЧХ).
Для устранения по меньшей мере этих недостатков описанный здесь пример механизма позиционирования клапана имеет тестер соленоида для проверки соленоида и/или электромагнитного клапана отдельно от клапана управления процессом. Описанный здесь пример механизма позиционирования клапанов также имеет встроенные контакты, разъемы и/или соединители, которые можно использовать для электрической подачи контрольных сигналов от тестера соленоида на твердотельное реле (ТТР). Управление ТТР осуществляется при помощи управляющих сигналов, приводящих соленоид в движение. В одном примере осуществления тестер соленоида отслеживает действие, состояние и/или положение соленоида и/или электромагнитного клапана во время временного отключения питания соленоида для определения того, работают ли соленоид и/или электромагнитный клапан надлежащим образом. В некоторых примерах осуществления отслеживается действие соленоида и/или положение сердечника соленоида. В дополнение или вместо этого может отслеживаться пневматическое действие электромагнитного клапана.
На ФИГ. 1 показан пример системы управления технологическим процессом 100, имеющий механизм позиционирования клапана 105, предназначенный, помимо другого, для тестирования электромагнитного клапана АСБ 110 и/или соленоида АСБ 155, связанного с электромагнитным клапаном. ФИГ. 2 иллюстрирует пример осуществления механизма позиционирования клапана 105 по ФИГ. 1. Этот пример механизма позиционирования клапана 105 включает контроллер положения клапана 205 любого типа (ФИГ. 2) для управления положением (например, степенью открывания/закрывания в %) клапана управления процессом 115 на основании управляющего сигнала клапана 120, получаемого от технологического контроллера 125 по одному или нескольким проводам и/или коммуникационным шинам 130. Пример контроллера положения клапана 205 управляет положением примера клапана управления процессом 115 при помощи управления, корректировки и/или выбора давления пневматической управляющей линии 135. Давление пневматической управляющей линии 135 управляет положением привода 140, связанного с клапаном управления процессом 115 и, следовательно, положением клапана управления процессом 115. Давлением пневматической управляющей линии 135 можно управлять, регулируя поток текучей среды от пневматического подвода 137 в пневматическую управляющую линию 135. Данный пример осуществления контроллера положения клапана 205 принимает один или несколько сигналов, представляющих нынешнее или текущее положение клапана управления процессом 115 по любому количеству и/или виду(ам) коммуникационных сигналов и/или коммуникационных линий, которые не показаны на ФИГ. 1 или 2, чтобы не перегружать рисунок. Используя любое количество и/или тип(ы) алгоритма(ов), способа(ов) и/или логики, данный пример контроллера положения клапана 205 управляет давлением пневматической управляющей линии 135 таким образом, чтобы клапан управления процессом 115 имел положение, в основном соответствующее положению, определенному и/или указанному управляющим сигналом клапана 120.
В данном примере осуществления провод(а) и/или шина(ы) 130 электрически соединены с соединительной коробкой или корпусом 145 данного примера механизма позиционирования клапана 105 при помощи одного или нескольких контактов, соединителей и/или разъемов 210 (ФИГ. 2) внутри соединительного корпуса 145. Для приема управляющего сигнала клапана 120 данный пример соединительной коробки 145 также имеет приемник 215 для преобразования аналогового управляющего сигнала клапана 120 в цифровые значения и/или цифровые самплы, пригодные для обработки при помощи примера контроллера положения клапана 205. В некоторых примерах, имеющих два провода 130 и два контакта 210, управляющий сигнал клапана 120 представляет собой сигнал токовой петли 4-20 тА, передаваемый по двум проводам 130, а пример приемника 215 представляет собой магистральный адресуемый дистанционный преобразователь (МАДП)). Хотя в данном примере контакты 210, приемник 215, передатчик 225 и тестовые контакты соленоида 230 изображены на ФИГ. 2 установленными в данном примере соединительного корпуса 145, их можно устанавливать в другом месте внутри механизма позиционирования клапана 105.
Для обеспечения контроллеру АСБ 150 возможности быстрого перекрытия потока текучей среды(сред) и/или другого материала(ов) через клапан управления процессом 115 в случае, например, аварии или опасной ситуации в системе, данный пример электромагнитного клапана 110 пневматически врезается в пневматическую управляющую линию 135 между механизмом позиционирования клапана 105 и клапаном управления процессом 115. Управляя состоянием или положением соленоида 155 электромагнитного клапана 110, данный пример контроллера АСБ 150 может разрывать или сбрасывать давление в пневматической управляющей линии 135, управляя положением клапана управления процессом 115. Контроллер АСБ 150 управляет состоянием или положением соленоида 155 путем регулировки, выбора или корректировки сигнала электропитания 160 соленоида 155. Если выбран сигнал электропитания 160, имеющий первое значение напряжения (например, 24 В постоянного тока, 48 В постоянного тока, 110 В переменного тока или 220 В переменного тока), соленоид 155 переходит в первое состояние, давая возможность механизму позиционирования клапана 105 управлять давлением в пневматической управляющей линии 135. В то же время, если сигнал электропитания 160 прерван (например, равен 0 В), соленоид 155 переходит во второе или другое состояние, отсекая механизм позиционирования клапана 105 от пневматической управляющей линии 135. С другой стороны, сигнал электропитания 160 в 0 В может соответствовать первому состоянию, а ненулевое напряжение (например, 24 В постоянного тока, 48 В постоянного тока, 110 В переменного тока или 220 В переменного тока) - второму состоянию. Выбирая, корректируя и/или регулируя напряжение электропитания 160 соленоида 155, контроллер АСБ может преодолеть положение клапана управления процессом 115 по причинам, связанным с безопасностью или аварийной ситуацией.
Традиционно данный пример контроллера АСБ 150 тестирует байпасирование/блокировку безопасности клапана управления процессом 115 путем кратковременного прерывания сигнала электропитания 160. Такое временное прерывание сигнала электропитания 160 должно заставить клапан управления процессом 115 начать движение в сторону положения безопасности (аварийного положения) (например, полностью "Закрыто" или полностью "Открыто", в зависимости от процесса). В то же время, так как сигнал электропитания 160 прерывается лишь на короткое время, клапан управления процессом 115 выполняет лишь частичный ход или частично перемещается в сторону положения безопасности или аварийного положения. Если будет выявлено, что клапан управления процессом 115 движется в правильном направлении в ответ на кратковременное прерывание сигнала электропитания 160, контроллер АСБ 150 может определить, что электромагнитный клапан 110 и клапан управления процессом 115 совместно работают надлежащим образом. В то же время, если будет выявлено, что клапан управления процессом 115 не движется в надлежащем направлении, такой пример контроллера АСБ не сможет определить, какой именно клапан (электромагнитный клапан 110 или клапан управления процессом 115) работает неправильно.
Для того, чтобы механизм позиционирования клапана 105 имел возможность тестировать электромагнитный клапан 110 независимо от клапана управления процессом 115, система 100 по ФИГ. 1 включает ТТР 165. Пример ТТР 165 по ФИГ. 1 электрически установлен между сигналом электропитания 160, вырабатываемым контроллером АСБ 150, и электромагнитным клапаном 110. Тестер соленоида 220 (ФИГ. 2) механизма позиционирования клапана 105 сконфигурирован так, чтобы управлять состоянием или положением ТТР 165 при помощи управляющего сигнала 170. Такой пример тестера соленоида 220 может управлять ТТР 165 при помощи управляющего сигнала 170, приводя его в первое состояние, при котором сигнал электропитания 160 электрически соединен с электромагнитным клапаном 110, или во второе состояние, при котором сигнал электропитания 160 электрически изолирован от электромагнитного клапана 110. Иными словами, управляющий сигнал 170 представляет собой сигнал прерывания электропитания, который указывает ТТР 165, нужно ли прервать, разъединить и/или электрически изолировать сигнал электропитания 160 от электромагнитного клапана 110. Примерами твердотельных реле, которые можно использовать в качестве примера ТТР 165, являются фотореле, такие как модель №348-431 производства Radionics, трансформаторные реле, такие как модель №HDA-3V25 производства Power-IO™, и гибридные ТТР, такие как модель №24D25-17 производства Opto 22, но этими реле выбор не ограничивается.
Пример управляющего сигнала 170 передается на ТТР 165 при помощи преобразователя 225 через один или несколько тестовых контактов соленоида, разъемы и/или соединители 230 и соответствующие провода 175. Данный пример преобразователя 225 и пример тестовых контактов соленоида 230 можно устанавливать в соединительной коробке или корпусе 145, как показано на ФИГ. 2. Альтернативно передатчик 225 и/или пример тестовых контактов соленоида 230 можно устанавливать в другом месте внутри примера механизма позиционирования клапана 105.
Данный пример преобразователя 225 преобразует цифровые управляющие значения и/или цифровые управляющие самплы, сгенерированные тестером соленоида 220 в аналоговый управляющий сигнал 170, пригодный для передачи на ТТР 165 при помощи контакта(ов) 230 и провода(ов) 175. В некоторых примерах имеются два провода 175 и два тестовых контакта соленоида 230, при этом первый из проводов 175 проводит нулевой сигнал или напряжение, а второй провод 175 передает аналоговое управляющее напряжение, которое управляет состоянием соленоида 155.
В данном примере тестер соленоида 220 отслеживает положение, состояние и/или действие соленоида 155 и/или электромагнитного клапана 110 при помощи мониторингового сигнала 180. Примеры мониторинговых сигналов 180 включают сигнал, представляющий электрическое или пневматическое действие соленоида 155, используемое для управления положением электромагнитного клапана 110, и сигнал, представляющий положение сердечника соленоида, но не ограничиваются ими. Такие мониторинговые сигналы 180 могут использоваться тестером соленоида 220 для определения того, достаточно ли перемещается сердечник 156 соленоида 155 при прерывании электропитания 160 при помощи ТТР 165, чтобы привести в действие электромагнитный клапан 110 надлежащим образом при аварийных отключениях и остановках из соображений безопасности.
Приемник 240 (ФИГ. 2) преобразует мониторинговый сигнал 180 в цифровой сигнал и/или цифровые самплы, представляющие положение и/или состояние соленоида 155 и/или электромагнитного клапана 110. Отслеживая оцифрованный мониторинговый сигнал 180 при передаче тестового управляющего сигнала 170 на ТТР 165, данный пример тестера соленоида 220 может определить, работают ли соленоид 155 и/или электромагнитный клапан 110 надлежащим образом. Так как тестовый управляющий сигнал 170 используется только для временного перемещения или изменения состояния соленоида 155, положение клапана управления процессом 115 должно только временно измениться на небольшую величину и на короткий промежуток времени. Как только тестовый управляющий сигнал 170 снимается и/или используется для выдачи команды ТТР 165 на возвращение в номинальное состояние, механизм позиционирования клапана 105 может восстановить требуемое положение клапана управления процессом 115. Один из примеров процесса, выполняемого примером тестера соленоида 220 и/или, в более общем значении, примером механизма позиционирования клапана 105 для тестирования соленоида 155 и/или электромагнитного клапана 110, описан далее, применительно к ФИГ. 5.
В дополнение или вместо этого тестер соленоида 220 может отслеживать любое количество и/или вид(ы) дополнительных или альтернативных мониторинговых сигналов. Например, тестер соленоида 220 может отслеживать давление в пневматической управляющей линии 135 за электромагнитным клапаном 110. Если, например, привод 140 представляет собой привод одностороннего действия и, таким образом, только одна пневматическая управляющая линия 135 необходима для управления положением клапана 115, неиспользуемый пневматический порт В механизма позиционирования клапана 105 можно пневматически подключить к пневматической управляющей линии 135 для отслеживания давления в пневматической управляющей линии 135 за электромагнитным клапаном 110. В таком примере приемник 240 может содержать преобразователь давления. При изменении состояния соленоида 155 при помощи ТТР 165 тестер соленоида 220 может отслеживать ожидаемое изменение давления в порту В с целью определить, работают ли соленоид 155 и электромагнитный клапан 110 совместно надлежащим образом.
На ФИГ. 3 показан другой пример системы управления технологическим процессом 300, имеющий механизм позиционирования клапана 305, позволяющий, помимо прочего, тестировать работу электромагнитного клапана 110 автоматической системы безопасности (АСБ). ФИГ. 4 иллюстрирует пример способа исполнения примера механизма позиционирования клапана 305 по ФИГ. 3. Так как некоторые элементы примеров, показанных на ФИГ. 3 и 4, идентичны тем, что описаны выше применительно к ФИГ. 1 и 2, мы не будем здесь повторять описание идентичных элементов. Вместо этого идентичные элементы показаны под теми же условными номерами, что и на ФИГ. 1-4, и заинтересованный читатель может обратиться к описаниям, приведенным выше, применительно к ФИГ. 1 и 2, за полным описанием этих элементов, имеющих одинаковые номера.
В отличие от примера, показанного на ФИГ. 1 и 2, в примере системы управления технологическим процессом 300 по ФИГ. 3 пример преобразователя 225 передает управляющий сигнал 170 на ТТР 165 через те же контакты, разъемы и/или соединители 210, которые используются для электрического соединения технологического контроллера 125 с приемником 215 при помощи примера провода 130. Как таковые, провода 305 и 306 электрически соединены с соответствующими концами провода 130 и соответствующими разъемами, контактами или соединителями 310 фильтра 315. Иными словами, технологический контроллер 125, пример приемника 215, пример преобразователя 225 и пример фильтра 315 связаны при помощи и/или подключены на ту же коммуникационную шину 130, 305, 306. В некоторых примерах сигналы и/или команды передаются на общую шину 130, 305, 306 при помощи 4-20 mA петель тока, пример приемника 215 и пример фильтра 315 имеют соответствующие МАДП-приемники, а пример преобразователя 225 имеет МАДП-преобразователь.
Пример фильтра 315 фильтрует МАДП-команды, полученные по проводам 305 и 306, для идентификации и/или детектирования тест-команды 170 электромагнитного клапана. При выявлении тест-команды соленоида 170 на шине 305, 306 пример фильтра 315 изменяет состояние ТТР 165. В некоторых примерах первая МАДП-команда используется для изменения состояния ТТР 165 и его перевода в первое состояние, а вторая МАДП-команда используется для изменения состояния ТТР 165 и его перевода во второе или другое состояние. В других примерах МАДП-команда используется для переключения между первым и вторым состоянием ТТР 165. Хотя в некоторых описанных здесь примерах используются МАДП-коммуникации и/или команды, способы и аппарат, раскрытые здесь, могут использовать любое количество и/или тип(ы) добавочных и/или альтернативных коммуникационных протоколов и/или команд, подобных тем, что связаны с шинами Foundation Fieldbus и/или Profibus.
Хотя пример системы управления технологическими процессами 100 и 300 показан на ФИГ. 1-4, элементы, показанные на ФИГ. 1-4, можно комбинировать, разделять, переставлять, удалять и/или использовать по-другому. Кроме того, пример контроллера положения клапана 205, пример приемника 215, пример тестера соленоида 220, пример преобразователя 225, пример приемника 240, пример фильтра 315 и/или, в более общем понимании, пример механизмов позиционирования клапанов 105 и 305 можно использовать при помощи аппаратного и программного обеспечения, програмно-аппаратных средств и/или любого сочетания аппаратного и программного обеспечения и/или програмно-аппаратных средств. Так, например, любой из примеров - пример контроллера положения клапана 205, пример приемника 215, пример тестера соленоида 220, пример преобразователя 225, пример приемника 240, пример фильтра 315 и/или, в более общем понимании, пример механизмов позиционирования клапанов 105 и 305 - можно реализовать при помощи одной или нескольких цепей, программируемого процессора(ов), прикладной интегральной схемы(схем) (ASIC)), программируемого логического устройства(PLD) и/или полевых программируемых логических устройств(FPLD) и т.п. Если в добавочной формуле изобретения для аппарата речь идет об исполнении, построенном сугубо на базе программного обеспечения и/или програмно-аппаратных средств, по меньшей мере один из примеров - пример контроллера положения клапана 205, пример приемника 215, пример тестера соленоида 220, пример преобразователя 225, пример приемника 240, пример фильтра 315 и/или, в более общем понимании, пример механизмов позиционирования клапанов 105 и 305 - является посредством данного положения явно определенным как имеющий материальный носитель, такой как память, цифровой диск (DVD), компакт-диск (CD) и т.п. для хранения программного обеспечения и програмно-аппаратных средств. Кроме того, пример системы управления технологическими процессами 100 и 300 может содержать элементы в дополнение или вместо тех, что показаны на ФИГ. 1-4, и/или может иметь более чем одну единицу каждого или всех показанных на фигурах элементов. Например, хотя на ФИГ. 1 и 3 показан один механизм позиционирования клапана 105, один электромагнитный клапан 110 и один клапан управления процессом 115, пример системы управления технологическими процессами 100 и 300 может содержать любое количество и/или тип(ы) технологических контроллеров, контроллеров АСБ, механизмов позиционирования клапанов, электромагнитных клапанов и/или клапанов управления процессом. Любой из или все добавочные механизмы позиционирования клапанов могут иметь пример тестера соленоида 220, пример преобразователя 225, пример тест-контактов 230 и пример приемника 240 для проверки соответствующего электромагнитного клапана 110 при помощи соответствующего ТТР 165 и/или соответствующего фильтра 315.
На ФИГ. 5 представлена блок-схема, представляющая пример процесса, который можно выполнить для реализации примера тестера соленоида 220 и/или примера механизмов позиционирования клапанов 105 и 305 по ФИГ. 1-4. Пример процесса по ФИГ. 5 можно выполнить по команде примера технологического контроллера 125 и/или примера контроллера АСБ 150 и/или автоматически выполнить при помощи механизма позиционирования клапана 105, 305 на периодической или непериодической основе. Пример процесса по ФИГ. 5 можно выполнить при помощи процессора, контроллера и/или любого другого процессорного устройства. Например, процесс по ФИГ. 5 может быть воплощен посредством кодовых инструкций, хранящихся в любом промышленном изделии, таком как, например, материальный компьютерный носитель информации. Примером материального компьютерного носителя информации может быть, не ограничиваясь только указанными средствами, флэш-память, CD, DVD, флоппи-диск и ПЗУ (ROM), ОЗУ (RAM), программируемое ПЗУ, электронно-программируемое ПЗУ (EPROM) и/или электронно перезаписываемый PROM (EEPROM), оптический диск, оптическое устройство хранения данных, магнитный диск, устройство памяти на магнитных дисках и/или любой другой носитель, который можно использовать для переноски или хранения программного кода и/или инструкций в виде машинных инструкций или структур данных, которые можно электронно соединить с процессором, универсальным или специальным компьютером, или другой машиной с процессором (например, примером процессорной платформы Р100, обсуждаемом ниже применительно к ФИГ. 6). Комбинации указанных выше средств также относят к компьютерным носителям информации. Машинные инструкции включают, например, инструкции и/или данные, при помощи которых процессор, универсальный компьютер, специальный компьютер или специальное процессорное устройство может реализовать один или несколько отдельных процессов. Иначе, некоторые или все примеры процессов по ФИГ. 5 можно реализовать, используя любую из комбинаций ASIC, PLD, FPLD, дискретной логики, аппаратного обеспечения, аппаратно-программных средств и т.п. Также, некоторые или все примеры процессов по ФИГ. 5 можно вместо этого реализовать в ручном режиме или в любой комбинации описанных выше способов, например, любой комбинации аппаратно-программных средств, программного обеспечения, дискретной логики или аппаратного обеспечения. Кроме того, можно использовать многие другие способы реализации примера действий по ФИГ. 5. Например, порядок выполнения блоков может быть изменен и/или один или несколько описанных блоков можно изменить, удалить, разделить или объединить.
Кроме того, любой или все примеры процессов по ФИГ. 5 можно выполнить последовательно или параллельно, например, разделить процессорные потоки, процессоры, устройства, дискретную логику, микросхемы и т.д.
Пример процесса на ФИГ. 5 начинается с примера тестера соленоида 220, посылающего тестовый управляющий сигнал соленоида 170 на фильтр 315 и/или ТТР 165 при помощи примера преобразователя 225 (блок 505). Тестер соленоида 220 отслеживает положение, состояние и/или действие соленоида 155 и/или электромагнитного клапана 110 при помощи мониторингового сигнала 180 (блок 510). Например, тестер соленоида 220 может отслеживать положение сердечника соленоида 156.
Если мониторинговый сигнал 180 представляет планируемое действие соленоида 155 и/или электромагнитного клапана 110 (блок 515), пример тестера соленоида 220 посылает второй тестовый управляющий сигнал 170 на фильтр 315 и/или ТТР 165 для восстановления предыдущего состояния соленоида 155 и/или электромагнитного клапана 110 (блок 520). Затем производится выход из примера процесса по ФИГ. 5.
Если мониторинговый сигнал 180 не представляет планируемое действие соленоида 155 и/или электромагнитного клапана 110 (блок 515), соленоид 155 и/или электромагнитный клапан 110 снабжается признаком и/или идентифицируется как потенциально неисправный (блок 525). Затем управление передается блоку 520.
На ФИГ. 6 показано схематическое изображение примера процессорной платформы Р100, которую можно использовать и/или запрограммировать для реализации примера тестера соленоида 220 и/или примера механизмов позиционирования клапанов 105 и 305 по ФИГ. 1-4. Например, процессорную платформу Р100 можно реализовать при помощи одного или нескольких универсальных процессоров, процессорных ядер, микроконтроллеров и т.д.
Процессорная платформа Р100 по примеру, показанному на ФИГ. 6, имеет по меньшей мере один универсальный программируемый процессор Р105. Процессор Р105 выполняет кодированные и/или машинно-ориентированные инструкции Р110 и/или Р112, хранящиеся в главной памяти процессора Р105 (например, в RAM Р115 и/или ROM Р120). Процессор Р105 может быть процессорным устройством любого типа, таким как процессорное ядро, процессор и/или микроконтроллер. Процессор Р105 может исполнять, помимо прочего, пример процесса по ФИГ. 5, реализуя пример описанных здесь способов, аппарата и промышленных изделий.
Процессор Р105 находится в коммуникационной связи с главной памятью (включающей ROM Р120 и/или RAM Р115) посредством шины Р125. RAM Р115 может быть реализован при помощи DRAM, SDRAM и/или любого другого типа RAM-устройства, a ROM может быть реализован при помощи флэш-памяти и/или любого другого требуемого типа устройства памяти. Доступ к памяти Р115 и памяти Р120 может контролировать контроллер памяти (не показан).
Процессорная платформа Р100 также имеет интерфейсную микросхему Р125. Интерфейсная микросхема Р125 может быть реализована при помощи интерфейсного стандарта любого типа, такого как интерфейс внешней памяти, последовательный порт, универсальный порт входа/выхода и т.д. К интерфейсной схеме Р125 подключают одно или несколько устройств ввода Р130 и одно или несколько устройств вывода Р130. Устройства ввода Р135 могут быть использованы, например, для реализации примера приемников 215 и 240. Устройства вывода Р140 могут быть использованы, например, для реализации примера преобразователя 225.
Хотя здесь описаны отдельные примеры способов, аппарата и промышленных изделий, сфера действия данного патента ими не ограничивается. Наоборот, настоящий патент охватывает все способы, аппарат и промышленные изделия, попадающие в сферу действия приведенной ниже формулы изобретения как в буквальном смысле, так и в рамках доктрины эквивалентов.
Группа изобретений относится к способу, аппарату и промышленным изделиям для испытания соленоидов автоматических систем безопасности (АСБ). Раскрываемый аппарат управления положением клапана имеет реле для управления состоянием соленоида и механизм позиционирования клапана, включающий передатчик для передачи тестового сигнала соленоида на реле, электрические контакты для коммуникационной передачи тестового сигнала соленоида на реле, электрические контакты для коммуникационного соединения тестового сигнала соленоида с реле по одному или нескольким проводам и тестер соленоида для выработки тестового сигнала соленоида и отслеживания отклика соленоида при передаче тестового сигнала соленоида на реле для проверки работы соленоида. Группа изобретений позволяет повысить надежность АСБ. 3 н. и 14 з.п. ф-лы, 6 ил.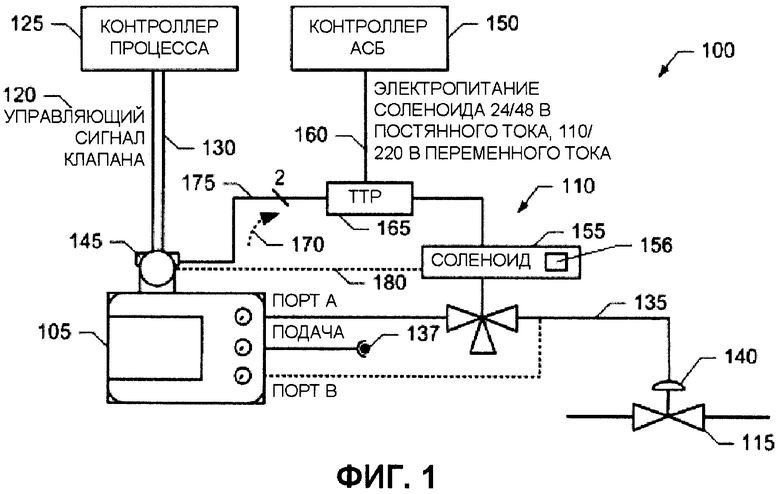
1. Аппарат управления положением клапана, содержащий:
реле для управления состоянием соленоида; и
механизм позиционирования клапана, включающий:
передатчик для передачи тестового сигнала соленоида на реле;
электрические контакты для коммуникационной передачи тестового сигнала соленоида на реле по одному или нескольким проводам; и
тестер соленоида для выработки тестового сигнала соленоида и отслеживания отклика соленоида, когда тестовый сигнал соленоида подается на реле для проверки работы соленоида.
2. Аппарат управления положением клапана по п.1, отличающийся тем, что дополнительно включает:
клапан управления процессом; и
контроллер автоматической системы безопасности (АСБ) для проверки работы клапана управления процессом в режиме безопасности путем выбора сигнала электропитания для соленоида и отслеживания положения клапана управления процессом в ответ на выбранный сигнал электропитания, при этом при помощи реле разрывается электрическое соединение между выбранным сигналом электропитания и соленоидом при получении тестового сигнала соленоида.
3. Аппарат управления положением клапана по п.1, отличающийся тем, что механизм позиционирования клапана дополнительно включает приемник для приема сигнала, представляющего положение сердечника соленоида, при этом тестером соленоида проверяется работа соленоида на основании полученного сигнала.
4. Аппарат управления положением клапана по п.1, отличающийся тем, что механизм позиционирования клапана дополнительно содержит приемник для приема сигнала, представляющего давление пневматического действия электромагнитного клапана, связанного с соленоидом, при этом тестером соленоида проверяется работа соленоида на основании полученного сигнала.
5. Аппарат управления положением клапана по п.1, отличающийся тем, что механизм позиционирования клапана дополнительно содержит:
приемник для приема управляющего сигнала положения клапана; и
контроллер положения клапана для управления положением клапана управления процессом в ответ на полученный управляющий сигнал положения клапана.
6. Аппарат управления положением клапана по п.1, отличающийся тем, что имеет реле для разрыва электрической связи между сигналом электропитания и соленоидом при получении тестового сигнала соленоида.
7. Аппарат управления положением клапана по п.1, отличающийся тем, что механизм позиционирования клапана дополнительно содержит:
приемник для приема управляющего сигнала положения клапана по одному или нескольким проводам; и
контроллер положения клапана для управления положением клапана управления процессом в ответ на полученный управляющий сигнал положения клапана, при этом передатчик имеет магистральный адресуемый дистанционный преобразователь (МАДП), а тестовый сигнал соленоида включает управляющий сигнал МАДП.
8. Аппарат управления положением клапана по п.7, отличающийся тем, что дополнительно содержит МАДП-преобразователь, соединенный коммуникационными линиями с реле, при этом МАДП-преобразователь получает тестовый сигнал соленоида от преобразователя по одному или нескольким проводам и управляет состоянием реле в ответ на тестовый сигнал соленоида.
9. Способ, включающий:
выбор управляющего сигнала на отключение электропитания для выбора состояния соленоида АСБ;
передачу управляющего сигнала на отключение электропитания от контроллера клапана на реле по одному или нескольким проводам для приведения соленоида АСБ в выбранное состояние; и
отслеживание отклика соленоида АСБ на выбранное состояние для проверки работы соленоида АСБ.
10. Способ по п.9, отличающийся тем, что передача управляющего сигнала на отключение электропитания на реле изменяет состояние реле и прерывает сигнал электропитания соленоида АСБ.
11. Способ по п.9, отличающийся тем, что отслеживание отклика соленоида АСБ на выбранное состояние включает:
получение сигнала, представляющего текущее состояние соленоида АСБ; и
определение того, привел ли управляющий сигнал на отключение электропитания соленоид АСБ в выбранное состояние на основании полученного сигнала.
12. Способ по п.9, отличающийся тем, что дополнительно включает:
получение управляющего сигнала положения клапана по одному или нескольким проводам; и
регулировку положения клапана управления процессом в ответ на полученный управляющий сигнал положения клапана.
13. Способ по п.9, отличающийся тем, что управляющий сигнал положения клапана содержит первую команду МАДП, а управляющий сигнал на отключение электропитания содержит вторую МАДП-команду.
14. Промышленное изделие для хранения машинно-ориентированных инструкций, обеспечивающих, при их исполнении, следующие действия машины:
выбор управляющего сигнала на отключение электропитания для выбора состояния соленоида автоматической системы безопасности (АСБ);
передачу управляющего сигнала на отключение электропитания от контроллера клапана на реле по одному или нескольким проводам для приведения соленоида АСБ в выбранное состояние; и
отслеживание отклика соленоида АСБ на выбранное состояние для проверки работы соленоида АСБ.
15. Промышленное изделие по п.14, отличающееся тем, что машинно-ориентированные инструкции, при их исполнении, обеспечивают передачу машиной управляющего сигнала на отключение электропитания на реле, что изменяет состояние реле и прерывает сигнал электропитания соленоида АСБ.
16. Промышленное изделие по п.14, отличающееся тем, что машинно-ориентированные инструкции, при их исполнении, обеспечивают отслеживание машиной отклика соленоида АСБ на выбранное состояние посредством:
получения сигнала, представляющего текущее состояние соленоида АСБ; и
определения того, привел ли управляющий сигнал на отключение электропитания соленоид АСБ в выбранное состояние на основании полученного сигнала.
17. Промышленное изделие по п.14, отличающееся тем, что машинно-ориентированные инструкции, при их исполнении, обеспечивают следующие действия машины:
получение управляющего сигнала положения клапана по одному или нескольким проводам; и
регулировку положения клапана управления процессом в ответ на полученный управляющий сигнал положения клапана.
| US 2007018127 A1 (FISHER CONTROLS INT [US]), 25.01.2007 | |||
| US 5665989 A (ATLANTIC RICHFIELD CO [US]), 09.09.1997 | |||
| WO 9917042 A1 (FISHER CONTROLS INT [US]), 08.04.1999 | |||
| СИГНАЛИЗАТОР КОНЕЧНЫХ ПОЛОЖЕНИЙ ЗАПОРНОГО ОРГАНА | 1995 |
|
RU2098708C1 |

