ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение в целом относится к запорной арматуре и, в частности, к способам и устройствам для беспроводной связи запорной арматуры и контроллера в системе управления технологическим процессом.
УРОВЕНЬ ТЕХНИКИ
[0002] Электронные устройства управления (например, электропневматический контроллер, программируемые контроллеры, аналоговые схемы управления и т.д.) обычно используются для контроля устройств для управления технологическим процессом (например, регулирующих клапанов, насосов, задвижек и т.д.). Данные электронные устройства управления активируют определенные функции устройств для управления технологическим процессом. В целях безопасности, экономичности и надежности для приведения в действие устройств для управления технологическим процессом используется множество известных мембранных или поршневых пневматических приводов, которые, как правило, соединены с системой управления всего технологического процесса с помощью электропневматического контроллера. Электропневматические контроллеры обычно выполняют с возможностью приема одного или более управляющих сигналов и преобразования этих управляющих сигналов в давление, которое приводит в действие пневматический привод для активации желаемой функции устройства для управления технологическим процессом, соединенного с пневмоприводом. Например, в случае если согласно алгоритму управления технологическим процессом требуется, чтобы клапан с пневматическим приводом пропускал больший объем рабочей жидкости, может быть увеличена величина управляющего сигнала для электропневматического контроллера, связанного с клапаном (например, с 10 миллиампер (мА) до 15 мА в случае, если электропневматический контроллер выполнен с возможностью приема сигнала управления 4-20 мА).
[0003] В электропневматических контроллерах обычно используют сигнал обратной связи, формируемый системой датчиков или элементом (например, датчиком положения), который выполнен с возможностью распознавания или обнаружения активного выходного сигнала устройства управления пневматическим приводом. Например, в случае с запорной арматурой с пневматическим приводом сигналом обратной связи является токовый сигнал, соответствующий положению запорной арматуры, измеренному или определенному датчиком положения. Как правило, токовый сигнал обратной связи, соответствующий положению запорной арматуры передают контроллеру с помощью проводного соединения, при этом положение запорной арматуры вычисляется контроллером на основании дифференциального напряжения на резисторе на двух входах контроллера.
[0004] В некоторых системах пневматически-активируемая запорная арматура с помощью проводов одновременно подключается к электрическому изолятору и к электропневматическому контроллеру. Электрический изолятор также с помощью проводов подключается к электропневматическому контроллеру. Соответственно, первым подключением запорной арматуры является прямое подключение непосредственно к контроллеру, а вторым является подключение к контроллеру через электрический изолятор. Электрический изолятор обеспечивает электропитание запорной арматуры и контроллера от источника переменного тока по трехпроводному кабелю, благодаря чему формируются токовые сигналы обратной связи от запорной арматуры и подаются через резистор на контроллер. Поскольку запорная арматура и контроллер получают электропитание от одного источника, с помощью электрического изолятора минимизируют возникновение паразитных контуров заземления.
[0005] С помощью контроллера определяют дифференциальное напряжение между двумя входными электрическими входами запорной арматуры, т.е. между первым проводным соединением, на которое токовый сигнал обратной связи поступает непосредственно от запорной арматуры, и вторым проводным соединением, на которое токовый сигнал обратной связи поступает от запорной арматуры через резистор, связанный с электрическим изолятором. Затем дифференциальное напряжение используют в контроллере для вычисления положения привода запорной арматуры, для сравнения вычисленного положения с желаемым заданным положением или управляющим сигналом, при этом используют процесс позиционирования для формирования параметра привода на основании (например, разности) вычисленного положения и управляющего сигнала. Параметр привода соответствует значению давления, воздействующего на пневматический привод для выполнения желаемой операции устройства управления (например, желаемого положения запорной арматуры), соединенного с пневмоприводом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Согласно первому аспекту изобретения способ включает преобразование движения привода запорного устройства в величину, указывающую на положение привода, причем преобразование выполняется беспроводным преобразователем положения, при этом беспроводной преобразователь положения функционально связан с запорной арматурой. Способ включает заполнение поля сигнала значением, указывающим на положение привода, при этом заполнение выполняется беспроводным преобразователем положения, а также активацию сигнала для передачи беспроводным способом электропневматическому контроллеру запорной арматуры, при этом сигнал передается беспроводным способом с помощью беспроводного преобразователя положения. С помощью электропневматического контроллера запорной арматуры вычисляют положение привода, исключительно на основании заполненного значения, которое содержится в сигнале, при этом электропневматический контроллер запорной арматуры управляет запорной арматурой на основании вычисленного положения привода.
[0007] Согласно второму аспекту изобретения преобразователь положения, используемый в системе управления технологическим процессом, содержит преобразователь положения для определения положения привода, соединенного с устройством управления. Устройство управления используется или предусмотрено для использования при управлении технологическим процессом в системе управления технологическим процессом. Интерфейс связи выполнен с возможностью передачи беспроводного сигнала, указывающего на положение привода, причем интерфейс связи функционально связан с беспроводным каналом связи, при этом беспроводной канал связи образует монопольное соединение между преобразователем положения и контроллером устройства управления. Для питания интерфейса связи предусмотрено подзаряжаемое устройство накопления энергии.
[0008] Согласно третьему аспекту изобретения контроллер запорной арматуры содержит первый вход для приема управляющего сигнала, соответствующего запорной арматуре, а также второй вход для приема беспроводного сигнала позиционирования от беспроводного преобразователя положения по беспроводному каналу связи, причем беспроводной сигнал позиционирования указывает положение привода запорной арматуры. С выхода контроллера запорной арматуры передается сигнал привода для управления приводом запорной арматуры, причем сигнал привода вычисляется контроллером запорной арматуры на основании управляющего сигнала и беспроводного сигнала позиционирования. Беспроводной канал связи является выделенным соединением между беспроводным преобразователем положения и контроллером запорной арматуры.
[0009] Кроме того, в соответствии с любым одним или более вышеуказанными аспектами способ формирования беспроводного сигнала позиционирования, преобразователь положения и/или контроллер запорной арматуры могут дополнительно включать любую одну или более следующих предпочтительных форм реализации, в любой желаемой комбинации.
[0010] В одной предпочтительной форме реализации изобретения способ может включать питание беспроводного преобразователя положения от устройства накопления энергии, входящего в состав беспроводного преобразователя положения или находящегося рядом с ним.
[0011] В другой предпочтительной форме реализации изобретения способ может включать подзарядку устройства накопления энергии с помощью по меньшей мере одного из следующих источников, солнечной энергии, временного подключения устройства накопления энергии к источнику энергии, возвращенной энергии от локальной вибрации или движения, или индукции от бесконтактного зарядного устройства.
[0012] В следующей предпочтительной форме реализации изобретения способ может включать активацию сигнала для беспроводной передачи, которая включает активацию сигнала для беспроводной передачи по беспроводному каналу связи, отличающуюся тем, что беспроводной канал связи является выделенным соединением между беспроводным преобразователем положения и электропневматическим контроллером.
[0013] В другой предпочтительной форме реализации изобретения способ может включать активацию сигнала для беспроводной передачи, которая включает активацию сигнала для беспроводной передачи по ячеистой сети передачи данных с помощью беспроводного протокола HART.
[0014] В следующей предпочтительной форме реализации изобретения способ может включать активацию сигнала для беспроводной передачи посредством сети передачи данных главному управляющему компьютеру технологического процесса, причем технологический процесс содержит запорный клапан и электропневматический контроллер.
[0015] В другой предпочтительной форме реализации изобретения беспроводной сигнал может передаваться по меньшей мере одним из контроллеров устройства управления или главным компьютером системы управления или системы управления технологическим процессом.
[0016] В другой предпочтительной форме реализации изобретения значение, содержащееся в поле беспроводного сигнала, указывает положение привода, и получатель беспроводного сигнала определяет положение привода исключительно на основании значения, содержащегося в поле беспроводного сигнала.
[0017] В следующей предпочтительной форме реализации изобретения беспроводной сигнал соответствует беспроводному протоколу HART, причем беспроводной канал связи входит в состав частной беспроводной ячеистой сети передачи данных системы управления технологическим процессом.
[0018] В другой предпочтительной форме реализации изобретения беспроводной сигнал передается в соответствии с расписанием, которое определяется сетевым менеджером беспроводной ячеистой сети передачи данных.
[0019] В следующей предпочтительной форме реализации изобретения датчик положения содержит по меньшей мере один из следующих компонентов: потенциометр, магнитный датчик, пьезоэлектрический датчик, датчик Холла или потенциометрический датчик.
[0020] В другой предпочтительной форме реализации изобретения устройство управления является запорной арматурой.
[0021] В следующей предпочтительной форме реализации изобретения управляющий сигнал может соответствовать беспроводному протоколу HART, а также беспроводной сигнал позиционирования может соответствовать беспроводному протоколу HART, при этом первый вход может быть соединен с беспроводной ячеистой сетью с возможностью передачи данных, а управляющий сигнал принимается в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сети, и/или второй вход может быть соединен с беспроводной ячеистой сетью с возможностью передачи данных, а беспроводной сигнал позиционирования принимается в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сети.
[0022] В другой предпочтительной форме реализации изобретения беспроводной сигнал позиционирования соответствует беспроводному протоколу HART.
[0023] Еще в одной предпочтительной форме реализации изобретения беспроводной канал связи входит в состав в беспроводной ячеистой сети, отличающийся тем, что беспроводной сигнал позиционирования принимается в соответствии с сетевым расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сети.
[0024] Еще в одной предпочтительной форме реализации контроллер запорной арматуры вычисляет сигнал привода в зависимости от значения, содержащегося в поле беспроводного сигнала позиционирования.
[0025] Еще в одной предпочтительной форме реализации беспроводной преобразователь положения и контроллер находятся в различных средах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
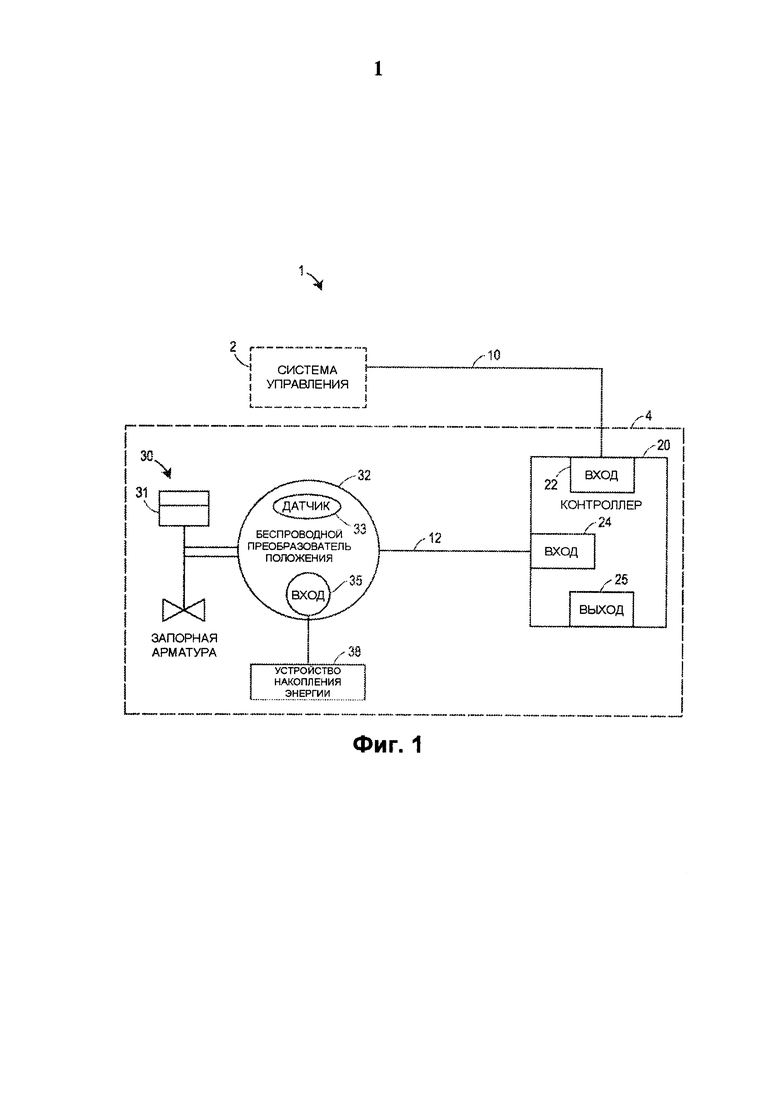
[0026] На Фиг. 1 проиллюстрирована функциональная схема типовой системы управления технологическим процессом, содержащей беспроводной преобразователь положения, который связан с контроллером устройства управления беспроводным способом;
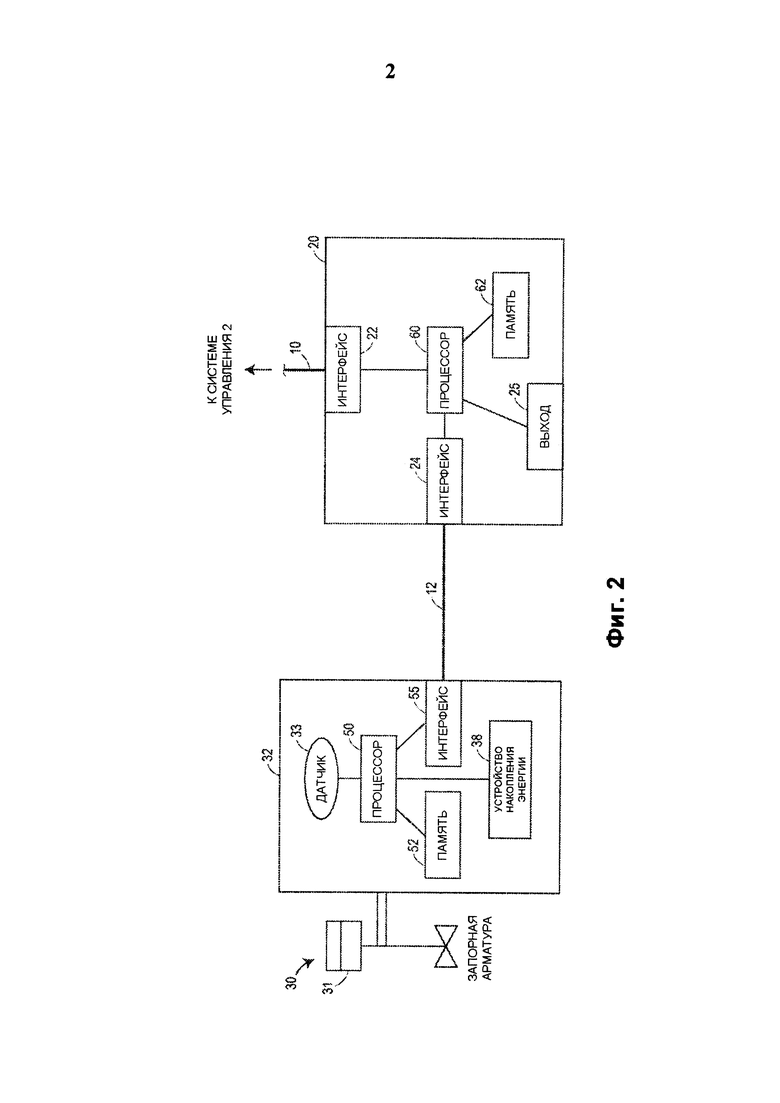
[0027] на Фиг. 2 проиллюстрирована подробная функциональная схема беспроводного преобразователя положения и контроллера, проиллюстрированного на Фиг. 1;
[0028] на Фиг. 3 представлена функциональная схема, которая иллюстрирует типовую систему управления технологическим процессом с использованием беспроводной сети связи для обеспечения беспроводной связи между устройствами управления, контроллерами, маршрутизаторами и другими сетевыми устройствами;
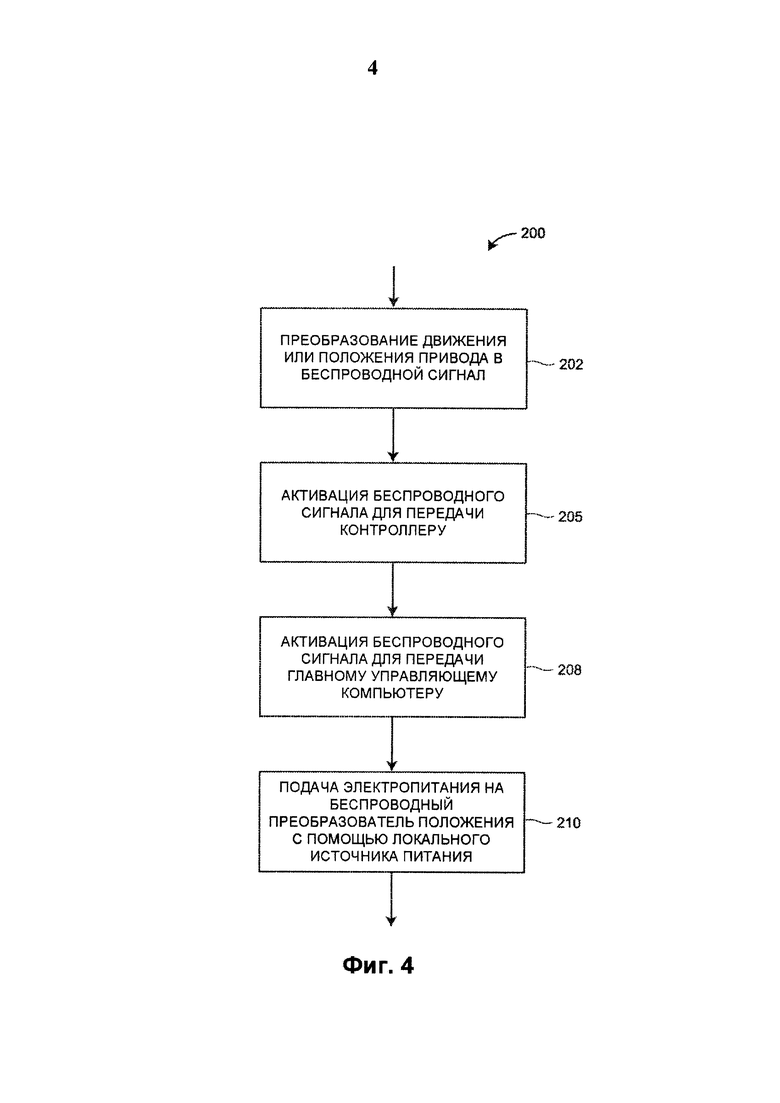
[0029] на Фиг. 4 проиллюстрирован типовой способ передачи беспроводного сигнала позиционирования контроллеру.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0030] Хотя ниже описаны типовые способы и устройства, содержащие, кроме других компонентов, программное обеспечение и/или микропрограммное обеспечение, выполняемое на аппаратных средствах, следует отметить, что данные системы приводятся исключительно в иллюстративных целях и не должны рассматриваться в качестве ограничивающих объем изобретения. Например, предполагается, что любой или все из данных аппаратных и программных компонентов могут быть реализованы исключительно в виде аппаратных средств, исключительно в виде программного обеспечения или в виде комбинации аппаратных средств и программного обеспечения. Таким образом, хотя ниже описываются типовые способы и устройства, приведенные примеры не являются единственным способом реализации данных способов и устройств.
[0031] Как правило, в системе управления технологическим процессом контроллер (например, электропневматический контроллер) непосредственно соединен с устройством управления (например, регулирующим клапаном, насосом, задвижкой и др.). Датчик положения, соединенный с устройством управления, измеряет движение привода, соединенного с устройством управления и формирует на резистивном выходе сигнал для контроллера устройства управления, указывающий движение или положение привода. Контроллер вычисляет положение привода на основании дифференциального напряжения на резистивном выходе, путем сравнения положения с желаемым управляющим сигналом или заданным положением, а затем на основании сопоставления выдает сигнал для управления устройством управления.
[0032] Однако в случае некоторых применений в проводах, по которым передаются сигналы указания положения, наводятся шумы. Эти электрические шумы могут влиять на выходной сигнал датчика в такой степени, что в некоторых случаях устройство управления может включаться, даже если не было команды для включения. Иными словами, электрические шумы, наводимые в проводах, могут привести к появлению ошибочных значений, принимаемых контроллером устройства управления. Таким образом, из-за ошибочных значений процесс, управляемый устройством управления, может стать неконтролируемым.
[0033] В других применениях проводные соединения между датчиком положения и контроллером являются крайне дорогими и сложными, если не невозможными из-за условий окружающей среды, таких как недоступность, температура, влажность, радиация, вибрация и тому подобное.
[0034] Среди вариантов реализации устройства и способов, описанных в данной заявке, предоставлен способ, в котором преобразователь положения устройства управления может быть беспроводным способом соединен с контроллером с возможностью передачи данных. Беспроводное соединение контроллера с преобразователем положения позволяет контроллеру получать по беспроводной сети сигнал указания положения от преобразователя положения так, чтобы минимизировать влияние ошибочных сигналов, вызванных электрическими шумами, наведенными в проводах, и неблагоприятными условиями окружающей среды. Кроме того, типовые способы и устройства, описанные в данной заявке, обеспечивают гибкость при установке и размещении контроллера в условиях эксплуатации, отличных от условий эксплуатации преобразователя положения. По этой причине производительность системы управления технологическим процессом может быть увеличена, а затраты на монтажные работы автоматизированной системы управления технологическим процессом могут быть снижены.
[0035] Наряду с тем что приведенные способы и устройства описаны ниже вместе с примерами использования цифрового электропневматического контроллера запорной арматуры и пневматически активируемой запорной арматуры, описанные способы и устройство могут быть реализованы с использованием контроллеров другого типа, запорной арматуры, которая активируется другим способом, и/или устройств управления технологическим процессом, отличных от запорной арматуры.
[0036] На Фиг. 1 проиллюстрирована схема системы управления технологическим процессом 1, содержащая систему управления 2 и зону управления технологическим процессом 4. Система управления технологическим процессом 1 может входить в состав технологического процесса, например, нефтеперерабатывающего, химического и/или другого промышленного технологического процесса, причем система управления технологическим процессом 1 может управлять одним или более процессами, выполняемыми технологическим оборудованием. Система управления 2 может содержать рабочие станции, контроллеры, кроссовые шкафы, платы ввода/вывода и/или управляющие компоненты системы управления технологическим процессом любого другого типа (не показаны на Фиг. 1). Как правило, система управления 2 находится в зоне, отличающейся от зоны управления технологическим процессом 4, например в закрытом помещении, например, для защиты системы управления технологическим процессом 2 от шума, пыли, перегрева, а также других неблагоприятных условий окружающей среды. Система управления 2 может быть соединена с возможностью передачи данных с электропневматическим контроллером 12, расположенным в зоне управления технологическим процессом 4. Система управления 2 может быть выполнена с возможностью подачи электропитания на электропневматический контроллер 20, или электропневматический контроллер 20 может получать электропитание от локального источника энергии, например, внешнего источника напряжения, солнечной энергии, аккумулятора, конденсатора и т.д.
[0037] Электропневматический контроллер 20 содержит интерфейс связи 22, выполненный с возможностью приема и передачи сигналов от системы управления 2 и/или к системе управления 2 посредством одного или более каналов связи 10. К одному или более каналам связи 10 могут относиться проводной канал связи, беспроводной канал связи или проводной и беспроводной каналы связи. Соответственно, интерфейс 22 может быть проводным интерфейсом, беспроводным интерфейсом или как проводным, так и беспроводным интерфейсом. Интерфейс 22 может быть выполнен с возможностью взаимодействия с главным управляющим компьютером, другими контроллерами и/или другими элементами, содержащимися в системе управления 2. В одном из вариантов реализации интерфейс 22 выполнен с возможностью взаимодействия с другими контроллерами и/или элементами, находящимися в зоне управления технологическим процессом 4.
[0038] В одном из вариантов реализации интерфейс 22 выполнен с возможностью получения управляющих сигналов от системы управления 2 посредством канала(ов) 10, которые определяют или соответствуют состоянию запорной арматуры 30, расположенного в зоне управления технологическим процессом 4. Например, с помощью управляющих сигналов, полученных электропневматическим контроллером 20 посредством интерфейса 22, может быть активирован пневмопривод 31, соединенный с запорной арматурой 30, для открытия, закрытия или движения в некоторое промежуточное положение.
[0039] Управляющие сигналы (например, входные сигналы), принятые посредством интерфейса 22, могут содержать, например, токовый сигнал 4-20 мА, сигнал постоянного тока 0-10 В, беспроводной сигнал и/или цифровые команды и т.д. Например, в случае если управляющим сигналом является токовый сигнал 4-20 мА, для связи с электропневматическим контроллером 20 посредством проводного соединения 10 может использоваться цифровой протокол передачи данных, например общеизвестный протокол дистанционно управляемого измерительного преобразователя, адресуемого через магистраль (HART). В другом примере сигнал управления может быть беспроводным управляющим сигналом, принимаемым по беспроводному каналу связи 10 с использованием беспроводного протокола HART. В других примерах управляющий сигнал может быть сигналом постоянного тока 0-10 В или сигналом другого типа. Данные протоколы цифровой передачи данных могут использоваться системой управления 2 для получения от электропневматического контроллера 20 идентификационной информации, информации о состоянии операции и диагностической информации. В качестве дополнительного или альтернативного варианта реализации изобретения, данные протоколы цифровой передачи данных могут использоваться в системе управления 2 с целью осуществления управления запорной арматурой 30 с помощью соответствующего контроллера 20.
[0040] Типовой электропневматический контроллер 20, проиллюстрированный на Фиг. 1, может быть выполнен с возможностью управления положением привода 31 и, таким образом, положением запорной арматуры 30. Электропневматический контроллер 20 может содержать, хотя это не проиллюстрировано, устройство управления, преобразователь ток-давление (I/P) и пневматическое реле. В других примерах электропневматический контроллер 20 может содержать любые другие компоненты для управления и/или подачи давления на привод запорной арматуры 31. Кроме того, электропневматический контроллер 20 может содержать другие компоненты обработки сигналов такие как, например, аналого-цифровые преобразователи, фильтры (например, фильтры нижних частот, фильтры верхних частот и цифровые фильтры), усилители и т.д. Например, управляющий сигнал, полученный от системы управления 2, перед обработкой блоком управления в электропневматическом контроллере 20 может быть отфильтрован (например, с помощью фильтра нижних/верхних частот).
[0041] В частности, электропневматический контроллер 20 может управлять положением привода 31 путем сопоставления сигнала беспроводной обратной связи или сигнала положения, генерируемого беспроводным преобразователем положения 32 с управляющим сигналом, поступающим от системы управления 2. Беспроводной сигнал обратной связи, генерируемый беспроводным преобразователем положения 32, может, например, соответствовать беспроводному протоколу HART или другому подходящему беспроводному протоколу, и может передаваться от преобразователя 32 контроллеру 20 с помощью одного или более беспроводных каналов связи 12.
[0042] Беспроводной сигнал обратной связи, генерируемый беспроводным преобразователем положения 32, может приниматься электропневматическим контроллером 20 на втором интерфейсе связи 24, соединенном с беспроводным(и) каналом(ми) связи 12. Интерфейс 24 может содержать беспроводной приемопередатчик или беспроводной приемник. Электропневматический контроллер 20 может вычислять сигнал обратной связи на основании беспроводного сигнала обратной связи или сигнала положения, принимаемого от беспроводного преобразователя положения 32 посредством второго интерфейса 24. В одном из вариантов реализации первый интерфейс 22 и второй интерфейс 24 могут быть объединены в один беспроводной интерфейс.
[0043] Управляющий сигнал, передаваемый системой управления 2, может использоваться электропневматическим контроллером 20 как заданное положение или опорный сигнал, соответствующий требуемой операции (например, требуемому положению, которое соответствует степени раскрытия регулирующей запорной арматуры 30 в процентах) запорной арматуры 30. Блок управления (не показан), содержащийся в электропневматическом контроллере 20, выполнен с возможностью сопоставления беспроводного сигнала обратной связи с сигналом управления с использованием управляющего сигнала и беспроводного сигнала обратной связи в качестве исходных значений в алгоритме позиционирования или процессе определения параметра привода. Во время процесса позиционирования, выполняемого с помощью блока управления, можно определить (например, вычислить) параметр привода на основании разности между сигналом обратной связи и управляющим сигналом. В одном из вариантов реализации изобретения данная вычисленная разница соответствует величине, вычисленной электропневматическим контроллером 20 для изменения положения привода 31, соединенного с запорной арматурой 30. В одном из вариантов реализации изобретения вычисленный параметр привода также соответствует току, формируемому блоком управления для активации I/P преобразователя в электропневматическом контроллере 20 для создания давления воздуха. Например, электропневматический контроллер 20 выдает сигнал привода на выходе 25 для управления запорной арматурой 30.
[0044] В одном из вариантов реализации I/P преобразователь в электропневматическом контроллере 20 соединен с выходом 25. I/P преобразователь может быть преобразователем типа ток-давление, который создает магнитное поле в зависимости от тока, протекающего через соленоид. Соленоид с помощью магнитного поля может управлять заслонкой, которая перемещается относительно сопла с целью изменения ограничения потока через сопло/заслонку для создания давления воздуха, зависящего от среднего значения тока, протекающего через соленоид. Это давление воздуха может быть усилено с помощью пневматического реле и подано на привод 31, соединенный с запорной арматурой 30. Пневматическое реле в электропневматическом контроллере 20 может быть пневматически соединено с приводом 31 для подачи давления воздуха на привод 31 (не показано).
[0045] Например, параметр привода, благодаря которому увеличивается ток, создаваемый блоком управления в электропневматическом контроллере 20, может привести к увеличению давления воздуха, подаваемого на пневматический привод 31 с целью активации привода 31 для перевода запорной арматуры 30 в закрытое положение. Подобным образом, параметры привода, благодаря которым уменьшается ток, создаваемый блоком управления, могут привести к снижению давления воздуха, подаваемого на пневматический привод 31, с целью активации привода 31 для перевода запорной арматуры 30 в открытое положение.
[0046] В других примерах выход 25 электропневматического контроллера 20 может содержать преобразователь типа напряжение-давление, при этом сигнал привода представляет собой напряжение, изменяемое с целью изменения давления на выходе для управления запорной арматурой 30. Кроме того, другие примеры выходов могут быть реализованы с использованием других видов жидкостей под давлением, включая сжатый воздух, гидравлическую жидкость и т.д.
[0047] Возвращаясь к примеру запорной арматуры 30, проиллюстрированной на Фиг. 1, в одном из вариантов реализации запорная арматура 30 может содержать седло клапана, которым определяется отверстие, обеспечивающее проход потока жидкости между входом и выходом запорной арматуры. В качестве запорной арматуры 30 может использоваться, например, поворотный клапан, клапан на четверть оборота, клапан с электроприводом, задвижка или любое другое регулирующее приспособление или устройство. Пневматический привод 31, соединенный с запорной арматурой 30, может быть функционально связан с элементом управления потоком посредством штока запорной арматуры, который перемещает элемент управления потоком в первом направлении (например, от седла клапана) для протекания жидкости между входом и выходом запорной арматуры и во втором направлении (например, к седлу клапана) для ограничения или прекращения потока жидкости между входом и выходом запорной арматуры.
[0048] К приводу 31, соединенному с типовой запорной арматурой 30, может относиться поршневой привод двойного действия, мембранный или поршневой привод одинарного действия с возвратной пружиной или любой другой подходящий привод или устройство управления технологическим процессом. Для управления потоком жидкости через запорную арматуру 30 запорная арматура соединена с беспроводным преобразователем положения 32. В одном из вариантов реализации беспроводной преобразователь положения 32 содержит датчик 33 для определения положения привода 31, соединенного с запорной арматурой 30, например датчик положения и/или датчик давления, к которым могут относиться, например, потенциометр и/или магнитный датчик. К датчику 33 может относиться потенциометр, магнитный датчик, пьезоэлектрический датчик, датчик Холла, потенциометрический датчик и т.д. В данной заявке термины "датчик" и "датчик положения" являются взаимозаменяемыми.
[0049] Датчик 33 беспроводного преобразователя положения 32 выполнен с возможностью определения положения привода 31 и, следовательно, положения элемента управления потоком относительно седла клапана (например, открытое положение, закрытое положение, промежуточное положение и т.д.). В одном из вариантов реализации изобретения датчик 33 в беспроводном преобразователе положения 32 выполнен с возможностью преобразования линейного движения привода 31, соответствующего положению привода 31, в беспроводной сигнал обратной связи. В одном из вариантов реализации датчик 33 в беспроводном преобразователе положения 32 выполнен с возможностью преобразования положения привода 31 в беспроводной сигнал обратной связи. Беспроводной преобразователь положения 32 может быть выполнен с возможностью активации беспроводного сигнала обратной связи для передачи электропневматическому контроллеру 20. Беспроводной сигнал обратной связи может соответствовать положению привода 31, соединенного с запорной арматурой 30, и, следовательно, положению запорной арматуры 30. Типовые технические средства, способы и устройства, описанные в данной заявке, позволяют реализовать электропневматический контроллер 20 для приема сигнала обратной связи от типового преобразователя положения 32 любого типа, проиллюстрированного на Фиг. 1, который может быть соединен с запорной арматурой 30.
[0050] Как правило, неблагоприятные условия окружающей среды существенно не влияют на датчик положения 33 беспроводного преобразователя положения 32. Беспроводной преобразователь положения 32 может содержать цепи подавления электромагнитных помех, цепи фильтрации шума, компоненты невосприимчивые к вибрации и/или компоненты, защищенные от радиоактивного излучения с целью дополнительной изоляции или защиты датчика положения 33 от неблагоприятных условий окружающей среды.
[0051] Беспроводной преобразователь положения 32 может содержать вход или подключение 35, выполненный с возможностью получения электропитания от локального источника питания или устройства накопления энергии 38. В одном из вариантов реализации изобретения локальный источник питания или устройство накопления энергии 38 является частью беспроводного преобразователя положения 32. В одном из вариантов реализации изобретения локальный источник питания или устройство накопления энергии 38 является аккумулятором. Локальным источником питания или устройством накопления энергии 38 может являться батарея, конденсатор или другое подзаряжаемое устройство накопления энергии. Могут использоваться любые известные способы подзарядки локального источника питания или устройства накопления энергии 38, например улавливание солнечной энергии; замена аккумулятора; восстановление энергии от локального источника тепла, вибрации и/или движения; временное подключение к разъему источника электропитания, например источнику питания переменного тока; индуктивная подзарядка с помощью бесконтактного зарядного устройства или любой другой способ подзарядки.
[0052] В то время как электропневматический контроллер 20 и беспроводной преобразователь положения 32 на Фиг. 1 проиллюстрированы как находящиеся в зоне управления технологическим процессом 4, электропневматический контроллер 20 и беспроводной преобразователь положения 32 могут находиться в соответствующих различных рабочих средах и соединены между собой с возможностью передачи данных посредством одного или более беспроводных каналов связи, например, посредством беспроводных каналов связи, которые являются частью беспроводной сети передачи данных технологического процесса или системы управления технологическим процессом 1. Например, беспроводной преобразователь положения 32 может находиться в среде с относительно высокой температурой и влажностью (например, влажность 90% и температура 180 градусов по Фаренгейту (°F)), при этом электропневматический контроллер 20 находится в контролируемых условиях внешней среды, которые выбраны как влажность 10% и 72°F.
[0053] Кроме того, в одном из вариантов реализации изобретения беспроводной канал связи 12 является выделенным соединением между беспроводным преобразователем положения 32 и контроллером 20. При этом нет необходимости в проводном соединении беспроводного преобразователя положения 32 и контроллера 20. В связи с этим беспроводному преобразователю положения 32 для подачи электропитания или взаимодействия с контроллером 20 не требуется каких-либо других соединений (кроме беспроводного канала связи 12). Более того, в случае использования технических средств, описанных в данной заявке, нет необходимости использовать электрический изолятор при подаче электропитания на беспроводной преобразователь положения 32. Напротив, поскольку беспроводной преобразователь положения 32 питается от локального источника питания 38 (который в некоторых вариантах реализации изобретения входит в состав беспроводного преобразователя положения 32), для питания преобразователя 32 не требуется прокладки громоздких проводов (а также нет необходимости в их обслуживании). Кроме того, поскольку преобразователь 32 и контроллер 20 получают электропитание от разных, отдельных и различных источников энергии, нет необходимости в использовании электрического изолятора для минимизации влияния паразитных контуров заземления.
[0054] Более того, в случае использования технических средств, описанных в данной заявке, также нет необходимости в использовании электрического изолятора для подачи токовых сигналов обратной связи, формируемых на резисторе преобразователем 32, для вычисления положения привода 31 преобразователя 32 с помощью контроллера 20. В частности, вместо требуемых двух входов контроллера 20 для определения дифференциального напряжения, а также требования, чтобы контроллер 20 вычислял положение привода 31 на основании определенного дифференциального напряжения, контроллер 20 только принимает сигнал (например, пакет) от беспроводного преобразователя положения 32 на вход 24, соединенный с беспроводным каналом 12. Из беспроводного сигнала контроллер 20 извлекает значение, содержащееся в поле сигнала, причем значение, содержащееся в поле сигнала, указывает положение привода 31. В одном из вариантов реализации значение, содержащееся в поле беспроводного сигнала, является единственным входным сигналом или значением, полученным от беспроводного преобразователя положения 32, причем данное значение используется контроллером 20 для определения положения привода 31; при этом нет необходимости во втором входном сигнале или значении от беспроводного преобразователя положения 32. Таким образом, в случае использования технических средств, описанных в данной заявке, не только отпадает необходимость использования электрического изолятора и проводов, соединяющих изолятор, привод и контроллер запорной арматуры, но также отпадает необходимость использования дополнительного оборудования, времени обработки и выделения ресурсов памяти контроллера для вычисления положения привода 31.
[0055] Подробная функциональная схема беспроводного преобразователя положения 32 проиллюстрирована на Фиг. 2. Как обсуждалось ранее, беспроводной преобразователь положения 32 может содержать датчик положения 33, соединенный с приводом 31 запорной арматуры 30. Беспроводной преобразователь положения 32 может дополнительно содержать процессор 50, соединенный с датчиком 33 и памятью 52. Память 52 может быть физической, энергонезависимой памятью, и может включать один или более машиночитаемых носителей информации. Например, память 52 может быть реализована в виде одного или более полупроводниковых модулей памяти, блоков памяти на магнитных носителях, блоков памяти на оптических носителях и/или любого другого подходящего физического, постоянного машиночитаемого носителя информации. В памяти 52 могут храниться исполняемые компьютером команды, которые выполняются процессором 50 с целью преобразования выходного сигнала датчика 33 в значение, указывающее положение привода 31 запорной арматуры 30, а также для добавления значения в поле беспроводного сигнала позиционирования. С целью активации передачи беспроводного сигнала позиционирования преобразователем 32 посредством беспроводного интерфейса 55 могут выполняться дополнительные исполняемые компьютером команды. Беспроводной интерфейс 55 может быть соединен с одним или более беспроводными каналами связи 12 с возможностью передачи данных, причем беспроводной интерфейс 55 может содержать приемопередатчик или содержать как передатчик, так и приемник.
[0056] В одном из вариантов реализации беспроводной сигнал позиционирования является пакетом, соответствующим беспроводному протоколу HART, при этом беспроводные каналы связи 12 входят в состав беспроводной ячеистой сети передачи данных системы управления технологическим процессом 1, причем пакет передается и принимается по беспроводному каналу связи 12 в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сети передачи данных. Например, менеджер сети может генерировать расписание передачи данных в сети (например, "сетевое расписание"), согласно которому определяют слоты для передачи пакетов, формируемые беспроводным преобразователем положения 32 так, что пакеты принимаются контроллером 20 для точного и безопасного управления запорной арматурой 30, причем процесс управления запорной арматурой 30 является неполным. В одном из вариантов реализации один или более элементов расписания, предназначенный для беспроводной ячейки преобразователя 32, может передаваться преобразователю 32 (например, от сетевого менеджера, посредством беспроводной сети передачи данных) и храниться в памяти 52 таким образом, что процессор 50 может активировать пакеты или сигналы для передачи контроллеру 20 на основании хранящегося в памяти расписания.
[0057] Для управления запорной арматурой 30 беспроводной сигнал позиционирования может передаваться электропневматическому контроллеру 20 посредством беспроводного интерфейса 55. В одном из вариантов реализации беспроводной сигнал позиционирования может дополнительно или альтернативно передаваться системе управления 2 посредством беспроводного интерфейса 55 с целью контроля позиционирования или других целей. Например, беспроводной сигнал позиционирования может передаваться хост-компьютеру системы управления 2. Для управления технологическим процессом предприятия или системы 1 беспроводной сигнал позиционирования может передаваться системе управления 2 непосредственно или через один или более промежуточных узлов, входящих в состав беспроводной сети передачи данных. В одном из вариантов реализации процессор выполнен с возможностью активации пакетов или сигналов, передаваемых системе управления 2 на основании расписания, хранящегося в памяти 55, причем расписание генерируется с помощью сетевого менеджера беспроводной сети передачи данных, соединенной с беспроводным интерфейсом 55.
[0058] На Фиг. 2 также проиллюстрирована подробная функциональная схема электропневматического регулятора 20, проиллюстрированного на Фиг. 1. Как уже говорилось ранее, контроллер 20 содержит первый вход или интерфейс 22 для приема управляющего сигнала от системы управления 2, а также второй вход или интерфейс 24 для приема беспроводного сигнала позиционирования от беспроводного преобразователя положения 32. Беспроводной интерфейс 24 может быть соединен с одним или более беспроводных каналов связи 12 с возможностью передачи данных, посредством которых принимают беспроводной сигнал позиционирования, генерируемый беспроводными преобразователем положения 32. Беспроводной интерфейс 24 может содержать приемопередатчик или может содержать как передатчик, так и приемник.
[0059] Первый интерфейс 22 может быть проводным интерфейсом, беспроводным интерфейсом или проводным и беспроводным интерфейсами, соединенными с одним или более каналами связи 10. В вариантах реализации, в которых первый интерфейс 22 содержит беспроводной интерфейс, первый интерфейс 22 и второй интерфейс 24 могут быть объединены в один беспроводной интерфейс. В одном из вариантов реализации один или более каналов связи 10 и/или один или более каналов связи 12 входят в состав беспроводной ячеистой сети передачи данных технологического процесса или системы 1.
[0060] Электропневматический контроллер 20 дополнительно содержит блок управления или процессор 60, соединенный с памятью 62, входами 22, 24, а также выходом 25. Память 62 может быть физической, постоянной памятью и может содержать один или более машиночитаемых носителей информации. Например, память 62 может быть реализована в виде одного или более полупроводниковых модулей памяти, блоков памяти на магнитных носителях, блоков памяти на оптических носителях и/или любого другого подходящего физического, постоянного машиночитаемого носителя информации. В памяти 62 могут храниться исполняемые компьютером команды, которые выполняются процессором 60, для вычисления значения сигнала привода, передаваемого через выход 25, для управления запорной арматурой 30 на основании принятого беспроводного сигнала позиционирования от второго интерфейса 24 и принятого управляющего сигнала от первого интерфейса 22. Например, исполняемые компьютером команды для вычисления сигнала привода содержат алгоритм позиционирования или процесс, который загружается во время конфигурации и/или в реальном времени из системы управления 2.
[0061] В одном из вариантов реализации беспроводной сигнал позиционирования является пакетом, соответствующим беспроводному протоколу HART, при этом беспроводные каналы связи 12 входят в состав беспроводной ячеистой сети передачи данных системы управления технологическим процессом 1, причем пакет передается и принимается по беспроводному каналу связи 12 в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сети передачи данных. Например, менеджер сети может создавать сетевое расписание, согласно которому определяют слоты для приема пакетов, принимаемых контроллером 20 от беспроводного преобразователя положения 32 для точного и безопасного управления запорной арматурой 30, причем процесс управления запорной арматурой 30 является неполным. В одном из вариантов реализации один или более элементов расписания, предназначенный для контроллера 20, может доставляться контроллеру 20 (например, от менеджера сети посредством беспроводной сети передачи данных) и храниться в памяти 62 так, чтобы контроллер 20 принимал пакеты или сигналы от беспроводного преобразователя положения 32 в соответствии с хранящимся в памяти расписанием.
[0062] На Фиг. 3 проиллюстрирована типовая сеть для управления технологическим процессом 100, которая может содержать беспроводной преобразователь положения 32. В одном из вариантов реализации сеть для управления технологическим процессом 100 входит в состав системы управления 1 на Фиг. 1. В частности, сеть 100 может содержать сеть производственной автоматизации 112 и сеть передачи данных 114. В одном из вариантов реализации сети для управления технологическим процессом 100, проиллюстрированной на Фиг. 1, сеть передачи данных 114 проиллюстрирована как беспроводная ячеистая сеть передачи данных. В одном из вариантов реализации сеть передачи данных 114 поддерживает беспроводной протокол HART (магистрального адресуемого удаленного преобразователя), например "беспроводная сеть HART ". При этом в некоторых вариантах реализации сети 100 сеть передачи данных 114 может поддерживать проводной протокол HART, например "проводная сеть HART ". В некоторых вариантах реализации сеть 100 может содержать как проводную, так и беспроводную сети HART 114.
[0063] Сеть производственной автоматизации 112 может содержать одну или более стационарных рабочих станций 116, а также одну или более портативных рабочих станций 118, соединенных магистральной линией связи 120. Рабочие станции 116, 118 упоминаются в данной заявке как синонимы выражений "рабочие станции", "хост-компьютеры системы управления", "управляющие хост-компьютеры" или "хост-компьютеры" сети для управления технологическим процессом 100. Магистральная линия связи 120 может быть реализована с помощью Ethernet, RS-485, Profibus DP или другого подходящего протокола связи.
[0064] Сеть производственной автоматизации 112 и беспроводная сеть HART 114 могут быть соединены посредством шлюза 122. В частности, шлюз 122 может быть соединен с магистральной линией связи 120 с помощью проводного подключения, а также может обмениваться данными с сетью производственной автоматизации 112 посредством любого подходящего общеизвестного протокола. Шлюз 122 может быть реализован в виде автономного устройства, в виде платы, устанавливаемой в слот расширения хост-компьютеров или рабочих станций 116 или 118, или как часть подсистемы ввода-вывода (10) системы программируемого контроллера (PLC) или распределенной системы управления (DCS) или любым другим образом. Шлюз 122 выполнен с возможностью предоставления доступа программным приложениям, выполняемым в сети 112, к различным сетевым устройствам беспроводной сети HART 114. Наряду с протоколом и преобразованием команд шлюз 122 выполнен с возможностью обеспечения тактовой синхронизации, путем использования временных интервалов и сверхциклов (совокупностей временных интервалов для информационного взаимодействия, расположенных через равные промежутки времени) схемы расписания беспроводной сети HART 114.
[0065] В некоторых случаях сети могут содержать более чем один шлюз 122. Эти несколько шлюзов могут использоваться с целью увеличения эффективной пропускной способности и надежности сети, при этом обеспечивается дополнительная пропускная способность для передачи данных между беспроводной сетью HART и сетью производственной автоматизации 112 или внешним миром. С другой стороны, может понадобиться увеличить пропускную способность шлюза 122 за счет соответствующей сетевой службы, в зависимости от коммуникационных требований к шлюзу в пределах сети HART. Шлюз 122 также может дополнительно заново определить необходимую пропускную способность при том, что система остается в рабочем состоянии. Например, шлюз 122 может принять запрос на получение большого объема данных от хост-компьютера, находящегося вне беспроводной сети HART 114. Затем для выполнения этой транзакции шлюз 122 может сделать запрос дополнительной пропускной способности за счет специализированной службы, например сетевого менеджера. Затем после завершения транзакции шлюз 122 может сделать запрос на освобождение неиспользуемой пропускной способности.
[0066] В некоторых вариантах реализации шлюз 122 функционально разделен на виртуальный шлюз 124 и одну или более точек доступа к сети 125а, 125b. Точки доступа к сети 125а, 125b могут быть отдельными физическими устройствами, соединенными со шлюзом 122 при помощи проводных линий связи с целью увеличения пропускной способности и общей надежности беспроводной сети HART 114. Хотя на Фиг. 1 проиллюстрировано проводное соединение 26 между физически отдельным шлюзом 122 и точками доступа 125а, 125b, будет понятно, что элементы 122-126 могут также быть предоставлены в виде единого устройства. Поскольку точки сетевого доступа 125а, 125b могут быть физически отделены от шлюза 122, каждая из точек доступа 125а, 125b из стратегических соображений может быть размещена в нескольких различных местах. Помимо увеличения пропускной способности несколько точек доступа 125а, 125b могут повысить общую надежность сети путем компенсации в одной или более точках доступа потенциально низкого качества сигнала в одной из точек доступа. Также в случае выхода из строя одной или более точек доступа 125а, 125b благодаря наличию нескольких точек доступа 125а, 125b обеспечивается резервирование.
[0067] Кроме того шлюз 122 может содержать программный модуль сетевого менеджера 127 (например, "сетевой менеджер") и программный модуль менеджера безопасности 128 (например, "менеджер безопасности"). В другом варианте реализации сетевой менеджер 127 и/или менеджер безопасности 128 могут выполняться на одном из хост-компьютеров управления технологическим процессом 116, 118 сети производственной автоматизации 112. Например, сетевой менеджер 127 может выполняться на хост-компьютере 116, а диспетчер безопасности 128 может выполняться на хост-компьютере 118. Сетевой менеджер 127 может отвечать за конфигурацию сети 114; распределение данных между устройствами, принадлежащими сети 114, например, беспроводными HART устройствами (например, планирование конфигурации сверхциклов); определение сетевого расписания передачи данных и активацию, по меньшей мере, элементов данного расписания для доставки устройствам-получателям и контроллерам; управление таблицами маршрутизации, мониторингом и формированием отчетов о состоянии беспроводной сети HART 114. Наряду с поддержкой резервирования сетевых менеджеров 127 предполагается, что для беспроводной сети HART 114 должен быть только один активный сетевой менеджер 127. В одном из возможных вариантов реализации сетевой менеджер 127 выполнен с возможностью анализа информации, соответствующей топологии сети, функциональным возможностям и скорости обновления каждого сетевого устройства, а также другой характерной информации. Также сетевой менеджер 127 выполнен с возможностью определения маршрутов и таблиц для передачи данных к сетевым устройствам, от сетевых устройств и между сетевыми устройствами, с учетом данных факторов. В одном из вариантов реализации сетевой менеджер 127 может входить в состав одного из управляющих хост-компьютеров 116, 118.
[0068] Возвращаясь к Фиг. 1, беспроводная сеть HART 114 может содержать одно или более полевых устройств или устройств управления 130-140. Как правило, подобные системы управления технологическим процессом используются в химических, нефтеперерабатывающих или других технологических процессах, включая полевые устройства, например запорные клапаны, позиционеры запорных клапанов, переключатели, датчики (например, температуры, давления и датчики скорости потока), насосы, вентиляторы и т.д. Полевые устройства выполнены с возможностью выполнения функций управления технологическим процессом, которыми можно управлять с помощью сети для управления технологическим процессом 100. Функция управления технологическим процессом может включать, например, открытие или закрытие запорной арматуры и/или мониторинг или измерение параметров технологического процесса. В беспроводной сети HART передачи данных 114 полевые устройства 130-140 являются отправителями и получателями беспроводных HART пакетов.
[0069] Внешний хост-компьютер 141 может быть подключен к сети 143, которая, в свою очередь, может быть подключена к сети производственной автоматизации 112 посредством маршрутизатора 144. Внешней сетью 143 может быть, например, всемирная компьютерная сеть (Интернет). Несмотря на то, что внешний хост-компьютер 141 не является частью сети производственной автоматизации 112 или беспроводной сети HART 114, внешний хост-компьютер 141 может иметь доступ к устройствам как сети 112, так и сети 114 через маршрутизатор 144. Соответственно, сеть передачи данных 114 и сеть производственной автоматизации 112 системы управления технологическим процессом 100 могут быть частными сетями, поэтому доступ к сетям 112, 114 является защищенным. Например, может понадобиться авторизация для устройств, желающих подключиться к сети 112 и/или сети 114. Подобным образом, внешний хост-компьютер 141 может управлять безопасным сетевым доступом для передачи данных из внешней сети 143.
[0070] Беспроводная сеть HART 114 может использовать протокол, обеспечивающий функциональные параметры такие же, как у проводных HART устройств. Практическое применение данного протокола может включать мониторинг технологических данных, мониторинг критических значений данных (с более жесткими функциональными требованиями), калибровку, мониторинг состояния и диагностики устройств, выявление неисправностей полевых устройств, пусконаладочные работы, а также диспетчерское управление технологическим процессом. Таким практическое применением предусматривают, что в беспроводной сети HART 114 используется протокол, обеспечивающий быстрое обновление и передачу больших массивов данных, а также поддержку сетевых устройств, являющихся частью сети HART 114 лишь временно при проведении пусконаладочных работ и технического обслуживания.
[0071] В одном из вариантов реализации беспроводной протокол, поддерживающий сеть HART 114 является расширенным вариантом HART, широко используемым промышленным стандартом, поддерживающим простые технологические процессы и технологии с использованием проводного оборудования. Беспроводной протокол HART может использоваться при реализации беспроводного стандарта передачи данных для технологического применения, а также для расширения сферы применения систем передачи, использующих протокол HART, причем благодаря этим преимуществам на производстве обеспечивают улучшение HART технологии для поддержки беспроводных средств автоматизации технологического процесса.
[0072] Возвращаясь к Фиг. 3, полевые устройства или устройства управления 130-136 могут быть беспроводными HART устройствами. Другими словами, полевые устройства 130, 132а, 132b, 134 или 136 могут быть выполнены в виде одного устройства, поддерживающего все уровни стека беспроводного протокола HART. В сети 100 полевое устройство 130 может являться беспроводным HART расходомером, полевое устройство 132b может являться беспроводным HART датчиком давления, а также полевое устройство 136 может являться беспроводным HART датчиком давления.
[0073] В частности, полевое устройство 134 может являться запорной арматурой или позиционером запорной арматуры, который содержит беспроводной преобразователь положения (например, беспроводной преобразователь положения 32 на Фиг. 1), а полевое устройство 132а может являться контроллером (например, контроллером 20 на Фиг. 1), который принимает указания положения от полевого устройства 134. В одном из вариантов реализации каждый управляющий хост-компьютер 116 и/или управляющий хост-компьютер 118 получает, по меньшей мере, некоторые указания положения от полевого устройства 134, например, посредством беспроводной ячеистой сети передачи данных 114, шлюза 122 и сети производственной автоматизации 120.
[0074] Кроме того, беспроводная сеть HART 114 может содержать маршрутизатор 160. Маршрутизатор 160 может быть выполнен как сетевое устройство, которое переадресовывает пакеты от одного сетевого устройства к другому. Сетевое устройство, действующее как маршрутизатор, выполнено с возможностью принятия решения, какому сетевому устройству следует переадресовывать определенный пакет на основании внутренних таблиц маршрутизации. В таких вариантах реализации в случае, если все устройства беспроводной сети HART 114 поддерживают маршрутизацию, нет необходимости в отдельных маршрутизаторах, например в маршрутизаторе 160. При этом может быть целесообразным добавить в сеть отдельный маршрутизатор 160 (например, для расширения сети или с целью экономии энергии полевых устройств в сети).
[0075] Все устройства, напрямую соединенные с беспроводной сетью HART114, могут рассматриваться как сетевые устройства. В частности, беспроводные полевые HART устройства 130-136, маршрутизаторы 160, шлюз 122, а также точки доступа 125а, 125b служат для маршрутизации и распределения сетевых устройств или узлов беспроводной сети HART 114. С целью обеспечения высокой надежности, а также масштабирования сети предусмотрено, что все сетевые устройства выполнены с возможностью поддержки маршрутизации, причем каждое сетевое устройство может быть глобально идентифицировано при помощи его HART адреса. Кроме того, каждое сетевое устройство может хранить информацию, связанную с периодичностью обновления, сеансами связи и ресурсами устройства. Иными словами, каждое сетевое устройство поддерживает актуальной информацию, относящуюся к маршрутизации и распределению. Сетевой менеджер 127 передает эту информацию сетевым устройствам после инициализации или повторной инициализации сетевых устройств в случае, если в сеть добавлено новое устройство, или в случае, если сетевой менеджер обнаружил или инициировал изменение топологии или расписание беспроводной сети HART 114.
[0076] Возвращаясь к Фиг. 3, в паре сетевых устройств, соединенных посредством прямого беспроводного соединения 165, каждое устройство распознает другие устройства как соседние. Следовательно, сетевые устройства беспроводной сети HART 114 могут создавать большое число соединений 165. Возможность и целесообразность установления прямого беспроводного соединения 165 между двумя сетевыми устройствами определяется несколькими факторами, например физическим расстоянием между узлами, препятствиями между узлами, мощностью сигнала в каждом из двух узлов и т.д. Также с помощью двух или более прямых беспроводных подключений 165 можно создавать пути между узлами, для которых невозможно создать прямое беспроводное соединение 165. Например, в случае прямого беспроводного соединения 165 между беспроводным портативным HART устройством 155 и беспроводным устройством HART 136 наряду со вторым прямым беспроводным соединением 165 между беспроводным устройством HART 136, маршрутизатор 160 создает канал связи между устройствами 155 и 160.
[0077] Каждое беспроводное соединение 165 характеризуется большим набором параметров, зависимых от частоты передачи, способа доступа к радиочастотному ресурсу и т.д. Специалисту в данной области техники будет понятно, что, как правило, протоколы беспроводной связи могут использоваться на выделенных частотах, например, назначенных Федеральной комиссией по связи (FCC) США, или в нелицензируемой части радиочастотного спектра (2,4 ГГц). Несмотря на то что система и способ, описанные в данной заявке могут быть применены к беспроводной сети, работающей на любой выделенной частоте или в диапазоне частот, описанная ниже реализация изобретения относится к беспроводной сети HART 114, работающей в нелицензируемой или общедоступной части радиочастотного спектра. В соответствии с данным вариантом реализации изобретения беспроводная сеть HART 114 при необходимости может быть легко активирована и настроена для работы в определенном нелицензируемом частотном диапазоне.
[0078] На Фиг. 4 проиллюстрирована блок-схема типового способа 200 передачи беспроводного сигнала позиционирования контроллеру устройства управления. Способ 200 может выполняться в сочетании с типовым электропневматическим контроллером 20, типовым беспроводным преобразователем положения 32, типовой конфигурацией, проиллюстрированной на Фиг. 1, 2 и/или 3, и/или с использованием других подходящих контроллеров, устройств управления и/или конфигураций. В одном из вариантов реализации изобретения один или более этапов способа 200 выполняются беспроводным преобразователем положения 32.
[0079] Способ 200 может быть реализован с использованием любой комбинации любых вышеуказанных технических средств, таких как, например, любая комбинация микропрограммного обеспечения, программного обеспечения, дискретной логики и/или аппаратных средств. Кроме того, могут использоваться многие другие способы реализации типовых операций, проиллюстрированных на Фиг. 4. Например, порядок выполнения этапов может быть изменен, и/или один или более описанных этапов могут быть изменены, пропущены или скомбинированы. Кроме того, любой из этапов или все этапы способа 200 могут осуществляться последовательно и/или параллельно, например, отдельными потоками обработки, процессорами, устройствами, дискретными логическими схемами и т.д.
[0080] Способ 200 включает преобразование движения привода запорной арматуры в сигнал (этап 202). Например, беспроводной датчик положения 32 соединен с запорной арматурой 30, при этом преобразователь 32 преобразует движение привода 31 запорной арматуры 30 в значение, указывающее на движение или положение привода. Значение, указывающее движение привода или положение, может быть записано в поле беспроводного сигнала позиционирования. В одном из вариантов реализации беспроводной сигнал позиционирования соответствует беспроводному протоколу HART.
[0081] Способ 200 также включает активацию беспроводным преобразователем положения беспроводного сигнала позиционирования для беспроводной передачи электропневматическому контроллеру запорной арматуры для управления запорной арматурой с использованием беспроводного протокола (этап 205). Например, беспроводной преобразователь положения 32 активирует беспроводной сигнал позиционирования для беспроводной передачи электропневматическому контроллеру 20 для управления запорной арматурой 30. В одном из вариантов реализации беспроводной сигнал позиционирования является единственным входным сигналом, принятым от запорной арматуры 30, который требуется контроллеру 20 для управления запорной арматурой 30. В одном из вариантов реализации беспроводной сигнал позиционирования соответствует беспроводному протоколу HART. В одном из вариантов реализации беспроводной сигнал положения передается электропневматическому контроллеру по каналу связи беспроводной ячеистой сети передачи данных в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сети передачи данных. В одном из вариантов реализации беспроводной канал связи, по которому передается сигнал, является единственным соединением между беспроводным преобразователем положения и контроллером.
[0082] Способ 200 может также включать активацию сигнала для беспроводной передачи управляющему хост-компьютеру технологического процесса или системы управления технологическим процессом, которая содержит запорную арматуру и электропневматический контроллер (этап 208). Например, беспроводной сигнал позиционирования может передаваться хост-компьютеру системы управления 116, 118 системы управления технологическим процессом 100. В одном из вариантов реализации изобретения беспроводной сигнал позиционирования передается хост-компьютеру системы управления по беспроводной ячеистой сети передачи данных в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сети передачи данных.
[0083] Некоторые варианты реализации способа 200 могут включать только один из этапов 205 и 208, при этом некоторые варианты реализации способа 200 могут включать как этап 205, так и этап 208.
[0084] В одном из вариантов реализации изобретения способ 200 включает подачу электропитания на беспроводной преобразователь положения от источника питания (этап 210). Например, беспроводной преобразователь положения 32 (например, процессор 50 и/или интерфейс связи 55 беспроводного преобразователя положения 32) получают электропитание от источника питания. Как правило, источником питания является локальный источник питания, который физически находится рядом с беспроводным преобразователем положения, обеспечивая прямое, локальное проводное подключение к источнику питания, например батарея, конденсатор или другой подходящий локальный источник питания. В некоторых вариантах реализации изобретения локальный источник питания входит в состав беспроводного преобразователя положения в качестве встроенного блока.
[0085] В некоторых вариантах реализации изобретения источник питания является подзаряжаемым устройством накопления энергии, при этом способ 200 включает подзарядку подзаряжаемого источника энергии с помощью любого известного способа подзарядки, например улавливания солнечной энергии; замены аккумулятора; восстановления энергии от локального источника тепла, вибрации и/или движения; временного подключение к разъему источника электропитания, например источнику питания переменного тока; индуктивной подзарядки с помощью бесконтактного зарядного устройства или любых других подходящих средств или механизмов подзарядки.
[0086] По меньшей мере, некоторые из ряда этапов, операций и способов, описанных выше, могут быть реализованы в виде аппаратного средства, микропрограммного обеспечения, выполняемого процессором, и/или программных команд или любой их комбинации. Например, по меньшей мере, элементы беспроводного преобразователя положения 32 могут быть реализованы в виде аппаратного средства, микропрограммного обеспечения, выполняемого процессором, и/или программных команд или любой их комбинации. Кроме того, по меньшей мере, часть этапов, проиллюстрированных на Фиг. 4, может быть реализована в виде аппаратного средства, микропрограммного обеспечения, выполняемого процессором, и/или программных команд или любой их комбинации.
[0087] В случае реализации изобретения с использованием программного и микропрограммного обеспечения, выполняемого процессором, команды программного и микропрограммного обеспечения могут храниться на любом постоянном, физическом машиночитаемом носителе информации, таком как магнитный диск, оптический диск, ОЗУ или ПЗУ или флэш-память, запоминающее устройство на магнитной ленте и т.д. Программные или микропрограммные команды могут включать машиночитаемые команды, хранящиеся в памяти или другом постоянном машиночитаемом носителе, причем выполнение данных команд процессором приводит к выполнению процессором различных операций.
[0088] В случае реализации изобретения с использованием аппаратных средств, аппаратные средства могут состоять из одного или более дискретных компонентов, интегральных схем, специализированных интегральных схем (ASIC), программируемых логических устройств и т.д.
[0089] Несмотря на приведенное выше подробное описание многочисленных различных реализаций изобретения следует понимать, что объем патентной охраны определяется пунктами формулы, описанными в конце данной заявки, а также их эквивалентами. Подробное описание приводится лишь в качестве примера и служит исключительно для пояснения, при этом не описывается каждый возможный вариант реализации изобретения, поскольку описание каждого возможного варианта реализации изобретения было бы нецелесообразным, если не невозможным. Многочисленные альтернативные варианты реализации изобретения могут быть реализованы при помощи существующей технологии или технологии, разработанной после даты регистрации настоящей заявки, которая могла бы попадать под действие пунктов формулы изобретения.

Изобретение относится к запорной арматуре и, в частности, к способам и устройствам для беспроводной связи запорной арматуры и контроллера в системе управления технологическим процессом. Беспроводной преобразователь положения для запорной арматуры в системе управления технологическим процессом преобразует движение или положение привода запорной арматуры в беспроводной сигнал, содержащий значение, указывающее положение привода. Преобразователь активирует беспроводной сигнал для передачи контроллеру запорной арматуры по беспроводному каналу связи, например, при помощи беспроводного протокола HART. Беспроводной канал связи является выделенным соединением между преобразователем и контроллером, причем преобразователь получает электропитание от локального подзаряжаемого устройства накопления энергии. Контроллер управляет запорной арматурой на основании значения, содержащегося в беспроводном сигнале. Преобразователь также может активировать беспроводной сигнал для передачи главному управляющему компьютеру системы управления технологическим процессом. Изобретение позволяет минимизировать влияние ошибочных сигналов, вызванных электрическими шумами в проводах, а также неблагоприятными условиями окружающей среды. 3 н. и 16 з.п. ф-лы, 4 ил.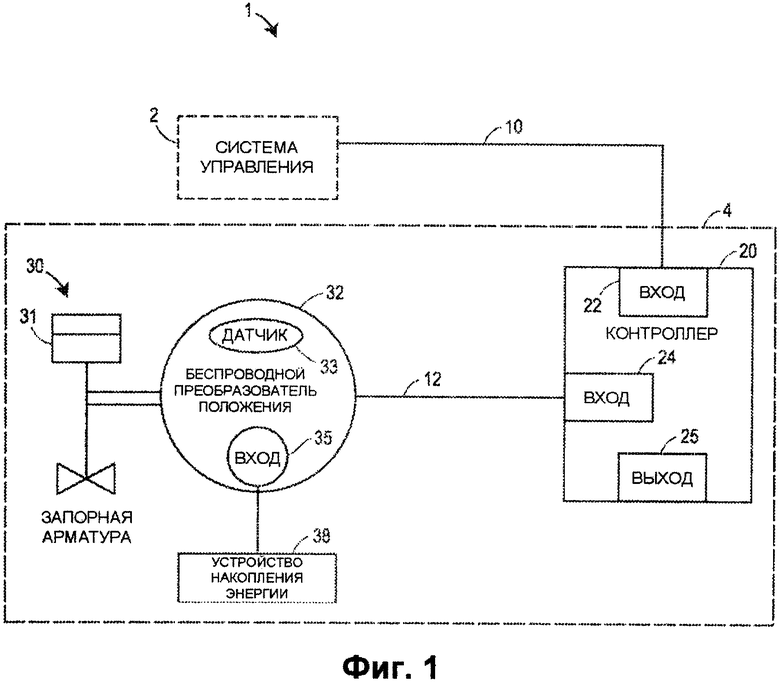
1. Способ управления запорной арматурой, включающий:
преобразование движения привода запорной арматуры в значение, указывающее положение привода,
причем преобразование выполняют с помощью беспроводного преобразователя положения, при этом
беспроводной преобразователь положения соединен с запорной арматурой;
заполнение поля беспроводного сигнала значением, указывающим положение привода,
причем заполнение поля беспроводного сигнала выполняют при помощи беспроводного преобразователя положения; и
активацию беспроводного сигнала для беспроводной передачи электропневматическому контроллеру запорной арматуры,
причем активацию беспроводного сигнала для беспроводной передачи выполняют при помощи беспроводного датчика положения,
при этом электропневматический контроллер запорной арматуры определяет положение привода исключительно на основании значения, содержащегося в поле беспроводного сигнала, причем
электропневматический контроллер запорной арматуры управляет запорной арматурой на основании указанного положения привода.
2. Способ по п. 1, дополнительно включающий электропитание беспроводного преобразователя положения от устройства накопления энергии, входящего в его состав или находящегося рядом с ним.
3. Способ по любому из пп. 1 или 2, дополнительно включающий подзарядку устройства накопления энергии с помощью по меньшей мере одного из источников энергии: солнечной энергии, временного подключения устройства накопления энергии к источнику энергии, возвращенной энергии от локальной вибрации или движения, или индукции от бесконтактного зарядного устройства.
4. Способ по любому из пп. 1 или 2, отличающийся тем, что активация беспроводного сигнала для беспроводной передачи включает активацию беспроводного сигнала для беспроводной передачи по беспроводному каналу связи, отличающуюся тем, что беспроводной канал связи является выделенным соединением между беспроводным преобразователем положения и электропневматическим контроллером.
5. Способ по любому из пп. 1 или 2, отличающийся тем, что активация беспроводного сигнала для беспроводной передачи включает активацию беспроводного сигнала для беспроводной передачи с помощью беспроводного протокола HART по ячеистой беспроводной сети передачи данных.
6. Способ по любому из пп. 1 или 2, дополнительно включающий активацию беспроводного сигнала для беспроводной передачи главному управляющему компьютеру технологического процесса по сети передачи данных, причем технологический процесс содержит запорную арматуру и электропневматический контроллер.
7. Преобразователь положения для использования в системе управления технологическим процессом, содержащий:
датчик положения для определения положения привода, соединенный с устройством управления, причем устройство управления используют в управлении технологическим процессом в системе управления производственным процессом;
интерфейс связи для передачи беспроводного сигнала, указывающего положение привода, причем значение поля, содержащееся в беспроводном сигнале, указывает положение привода;
интерфейс связи, соединенный с беспроводным каналом связи;
беспроводной канал связи, формирующий выделенное соединение между преобразователем положения и контроллером устройства управления; и
подзаряжаемое устройство накопления энергии для электропитания интерфейса связи.
8. Преобразователь положения по п. 7, отличающийся тем, что беспроводной сигнал передается по меньшей мере одним из следующих устройств: контроллером устройства управления, или компьютером системы управления, или системой управления технологическим процессом.
9. Преобразователь положения по любому из пп. 7 или 8, отличающийся тем, что получатель беспроводного сигнала определяет положение привода непосредственно на основании значения поля, содержащегося в беспроводном сигнале.
10. Преобразователь положения по любому из пп. 7 или 8, отличающийся тем, что беспроводной сигнал соответствует беспроводному протоколу HART.
11. Преобразователь положения по любому из пп. 7 или 8, отличающийся тем, что беспроводной канал связи входит в состав частной беспроводной ячеистой сети передачи данных системы управления технологическим процессом.
12. Преобразователь положения по любому из пп. 7 или 8, отличающийся тем, что беспроводной сигнал передается в соответствии с расписанием, которое определяется сетевым менеджером беспроводной ячеистой сети передачи данных.
13. Преобразователь положения по любому из пп. 7 или 8, отличающийся тем, что датчиком положения является по меньшей мере один из следующих компонентов: потенциометр, магнитный датчик, пьезоэлектрический датчик, датчик Холла или потенциометрический датчик.
14. Преобразователь положения по любому из пп. 7 или 8, отличающийся тем, что управляемым устройством является запорная арматура.
15. Контроллер запорной арматуры, содержащий:
первый вход для приема управляющего сигнала, соответствующего запорной арматуре;
второй вход для приема беспроводного сигнала позиционирования от беспроводного преобразователя положения по беспроводному каналу связи, причем беспроводной сигнал позиционирования указывает положение привода запорной арматуры;
выход для передачи сигнала привода для управления приводом запорной арматуры, причем сигнал привода определяется контроллером запорной арматуры на основании управляющего сигнала и беспроводного сигнала позиционирования, причем контроллер запорной арматуры вычисляет сигнал привода в зависимости от значения поля, содержащегося в беспроводном сигнале позиционирования; и
при этом беспроводной канал связи является выделенным соединением между беспроводным преобразователем положения и контроллером запорной арматуры.
16. Контроллер запорной арматуры по п. 15, отличающийся тем, что по меньшей мере один из:
управляющих сигналов соответствует беспроводному протоколу HART;
беспроводных сигналов позиционирования соответствует беспроводному протоколу HART;
первых входов соединен с беспроводной ячеистой сетью с возможностью передачи данных, причем управляющий сигнал принимают в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сетью; или
вторых входов соединен с беспроводной ячеистой сетью с возможностью передачи данных, причем беспроводной сигнал позиционирования принимают в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сетью.
17. Контроллер запорной арматуры по любому из пп. 15 или 16, отличающийся тем, что беспроводной сигнал позиционирования соответствует беспроводному протоколу HART.
18. Контроллер запорной арматуры по любому из пп. 15 или 16, отличающийся тем, что беспроводной канал связи входит в состав беспроводной ячеистой сети, и отличающийся тем, что беспроводной сигнал позиционирования принимают в соответствии с расписанием, сгенерированным сетевым менеджером беспроводной ячеистой сети.
19. Контроллер запорной арматуры по любому из пп. 15 или 16, отличающийся тем, что беспроводной преобразователь положения и контроллер запорной арматуры находятся в разных средах.
| US 2010264868 A1, 21.10.2010 | |||
| US 2007159161 A1, 12.07.2007 | |||
| СПОСОБ И УСТРОЙСТВО С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ УПРАВЛЯЮЩЕЙ СИСТЕМЫ | 2005 |
|
RU2393369C2 |
| US 5431182 A1, 11.07.1995. | |||

