Область техники, к которой относится изобретение
Настоящее изобретение относится в целом, к регуляторам и, в частности, к способам и устройству для ограничения изменения величины запуска электропневматического регулятора.
Уровень техники
Электронные управляющие устройства (например, электромеханический регулятор, программируемые контроллеры, аналоговые управляющие схемы и т.д.) обычно используются для управления устройствами контроля рабочих процессов (например, контрольными клапанами, насосами, воздушными клапанами и т.д.). Эти электронные управляющие устройства определяют заданное функционирование устройств контроля рабочих процессов. В целях безопасности, достижения рентабельности и надежности многие пневматические приводы мембранного или поршневого типа используются для приведения в действие устройств контроля рабочих процессов и обычно подключаются к общей системе контроля рабочих процессов с помощью электропневматического регулятора. Электропневматические регуляторы обычно конфигурируются под получение одного или нескольких управляющих сигналов и их преобразование в давление, подаваемое на пневматический привод для вызова нужной операции устройства контроля рабочего процесса, подсоединенного к пневматическому приводу. Например, если согласно стандартной программе контроля рабочего процесса требуется, чтобы пневматически активируемый клапан пропустил больший объем рабочей текучей среды, величина управляющего сигнала, подаваемого на связанный с клапаном электропневматический регулятор, может возрасти (например, от 10 миллиампер (мА) до 15 мА в том случае, когда электропневматический регулятор конфигурируется под получение управляющего сигнала на 4-20 мА).
Электропневматические регуляторы обычно используют сигнал обратной связи, генерируемый системой датчиков обратной связи или элементом (например, датчиком положения), который считывает или обнаруживает рабочий ответный сигнал от пневматически активируемого устройства управления. Например, в случае пневматически активируемого клапана сигнал обратной связи может соответствовать положению клапана при измереннном и определенном положении рабочего органа, сделанным датчиком. Электропневматический регулятор сравнивает сигнал обратной связи с требуемым установочным значением или управляющим сигналом и использует процесс управления положением рабочего органа для формирования величины запуска, основанной на сигнале обратной связи и на управляющем сигнале (например, на разности между ними). Эта величина запуска соответствует давлению, которое должно быть подано на пневматический регулятор для выполнения управляющим устройством, подсоединенным к пневматическому приводу, требуемой работы (например, перемещения клапана в требуемое положение).
Раскрытие изобретения
Описаны приведенные в примере способы и устройства, предназначенные для ограничения изменения величины запуска в электропневматическом регуляторе. Приведенный в примере способ включает прием управляющего сигнала и сигнала обратной связи, вычисление на основании управляющего сигнала и сигнала обратной связи величины запуска и определение, является ли разность между величиной запуска и предыдущей величиной запуска большей, чем предел нарастания запуска электропневматического регулятора. Приведенный в примере способ далее включает изменение вычисленной величины запуска, основанной на пределе нарастания помех.
Приведенное в примере устройство, раскрытое в этой работе, включает ограничитель нарастания тока запуска, предназначенный для получения величины запуска и предыдущей величины запуска, определения превышения разности между величиной запуска и предыдущей величиной предела нарастания электропневматического регулятора, и для изменения вычисленной величины запуска, основанной на пределе нарастания. Приведенное в примере устройство также может включать процессор управления сервомеханизмом для получения управляющего сигнала и сигнала обратной связи, вычисления величины запуска на основании управляющего сигнала и сигнала обратной связи, подачи сигнала этой величины запуска на ограничитель нарастания тока запуска и передачи измененной величины запуска на измерительный преобразователь электропневматического регулятора.
Краткое описание чертежей
На ФИГ.1 показана графическая схема приведенной в примере сборки клапанного управляющего устройства, включая приведенное в примере клапанное управляющее устройство и сам клапан.
На ФИГ.2 показана блок-схема приведенного в примере блока управления и приведенного в примере ограничителя нарастания тока запуска для электропневматического преобразователя из ФИГ.1.
На ФИГ.3А представлены графики вычисленных и фактических значений тока запуска электропневматического преобразователя применительно к клапанному управляющему устройству из ФИГ.1, необорудованному приведенным в примере ограничителем нарастания тока запуска электропневматического преобразователя из ФИГ.1 и 2.
На ФИГ.3В представлены графики вычисленных и фактических значений тока запуска электропневматического преобразователя применительно к клапанному управляющему устройству из ФИГ.1, включающему приведенный в примере ограничитель нарастания тока запуска электропневматического преобразователя из ФИГ.1 и 2.
ФИГ.4А и 4В - это графики предела нарастания, основанные на средних значениях токов запуска электропневматического преобразователя.
ФИГ. 5, 6 и 7 - это блок-схемы приведенных в примерах способов, которые можно использовать для реализации приведенного в примере ограничителя нарастания тока запуска для электропневматического преобразователя, приведенного в примере процессора управления сервомеханизмом, приведенной в примере печатной платы и/или цифрового клапанного управляющего устройства из ФИГ.1 и 2.
ФИГ.8 - это блок-схема приведенной в примере системы процессора, которая может быть использована для реализации приведенных в примерах способов и устройств, описанных в данной работе.
Осуществление изобретения
Следует отметить, что приведенные ниже в примере способы и устройства, включая среди прочих компонентов программное и/или микропрограммное обеспечения, записанные на аппаратное обеспечение, носят только иллюстративный характер и не должны рассматриваться как ограничительные. Например, предполагается, что любой или все из этих компонентов аппаратного, программного и микропрограммного обеспечения могут быть воплощены исключительно в аппаратное обеспечение, исключительно в программное обеспечение или в любую комбинацию программного и аппаратного обеспечении. Соответственно, приведенные ниже в примере способы и устройства не являются единственным способом реализации таких способов и устройства.
На рабочие характеристики процесса управления положением рабочего органа может отрицательно повлиять высокая индуктивность катушечной обмотки (например, обмотки соленоида), установленной в электропневматическом регуляторе. В частности, эта высокая индуктивность может ограничить скорость возрастания электрического тока в соленоиде или в обмотке электропневматического регулятора в результате изменения характеристик электропитания, подаваемого на обмотку. Однако, когда величина тока, проходящего через обмотку или соленоид, уменьшается, скорость такого снижения может быть ограничена стабилитроном, который можно использовать для установки уровня фиксации напряжения соленоида или обмотки, а не ограничивать такое уменьшение за счет других характеристик, присущих схеме регулирования величины тока. Напряжение обычно фиксируется на более высоком уровне, чем напряжение электропитания, что позволяет величине тока снижаться с более высокой скоростью, чем возрастать.
В результате разности скоростей возрастания или снижения электрического тока в обмотке или в соленоиде, электропневматический регулятор проявляет асимметричное регулирующее воздействие, вызывающее в некоторых условиях изменение или отклонение среднего тока соленоида (которое, например, становится компенсирующим) от предписанной величины тока соленоида или величины запуска, обусловленных процессом управления положением рабочего органа. Другими словами, высокая индуктивность в обмотке или в соленоиде электропневматического регулятора приводит к общему ограничению нарастания для электропневматического регулятора, которое может определяться по скорости возрастания тока в обмотке или в соленоиде. Более низкий предел нарастания, связанный с возрастанием величины тока в обмотке или соленоиде, относительно скорости нарастания выходного напряжения, связанной со снижением величины тока в обмотке или соленоиде, приводит к асимметричному регулирующему воздействию на электропневматический регулятор. Это асимметричное регулирующее воздействие электропневматического регулятора в некоторых условиях может, в конечном счете, привести к постепенному ухудшению точности управления положением пневматического привода, подсоединенного к электропневматическому регулятору.
Кроме того, на процесс управления положением рабочего органа могут оказать отрицательное воздействие помехи сигнала обратной связи и/или управляющего сигнала. Например, при уровне помех, которые приводят к превышению результата вычислений величины запуска на 100%, но не приводят к их падению ниже 0%, или же в случае превышения величиной запуска обоих пределов на асимметричную величину, фактическая средняя выходная величина запуска отличается от средней вычисленной величины запуска. Эта разница приводит к смещению действующего выходного сигнала процесса управления положением рабочего органа, приводя к ошибке управления положением в пневматическом приводе и в управляющем устройстве.
Приведенные в примере способы и устройства, описанные в данной работе, и, в частности клапанное управляющее устройство можно использовать для коррекции асимметричного регулирующего воздействия, возникающего в результате высокой индуктивности соленоида или обмотки электропневматического регулятора и/или по причине помех сигнала обратной связи и/или управляющего сигнала. Более обобщенно, приведенные в примере способы и устройство, описанные в данной работе, можно использовать для коррекци асимметричного регулирующего воздействия электропневматического регулятора, возникающего, например, в результате рабочих ограничений на работу электропневматического регулятора (например, сложности, связанные с запуском индуктивных нагрузок в работу), рабочих ограничений на работу клапана, высокочастотных помех системы, наводок из окружающей среды и/или задержки управления.
Электропневматический регулятор обычно включает блок управления, который обеспечивает подачу тока в электропневматический преобразователь, такой как преобразователь величины тока в пневматическое воздействие (I/P). Блок управления вычисляет сигнал запуска, основанный на управляющем сигнале и сигнале обратной связи. Такой управляющий сигнал соответствует установочному значению управляющего устройства (например, клапана), а сигнал обратной связи - положению и/или давлению со стороны управляющего устройства. Разность или сигнал ошибки между управляющим сигналом и сигналом обратной связи соответствует величине запуска (например, напряжения), которое используется для перемещения привода, подсоединенного к управляющему устройству, преобразователем с целью достижения указанной установочной точки. В частности, блок управления использует величину запуска для генерирования и/или контроля тока, проходящего через соленоид или катушку в электропневматическом преобразователе, в соответствии с которым создается пневматическое давление.
После этого может быть создано пневматическое усилие, используемое в дальнейшем для приведения в действие управляющего устройства (например, клапана).
Электропневматический преобразователь функционирует как измерительный преобразователь, предназначенный для преобразования тока в пневматическое давление с помощью соленоида (например, посредством катушки или индуктора с высокой индуктивностью). Соленоид магнитным способом управляет дроссельной заслонкой, которая регулирует работу выпускного отверстия с целью изменения объема потока, проходящего через выпускное отверстие/дроссельную заслонку, для обеспечения подачи пневматического давления, изменяемого в соответствии со средним значением тока, проходящего через соленоид. Высокий индуктивный импеданс соленоида и характеристики электропитания, подаваемого на соленоид, ограничивают скорость (то есть определяют скорость нарастания выходного напряжения) возрастания величины тока, проходящего через соленоид электропневматического преобразователя. Однако, как отмечено выше, высокий импеданс не ограничивает таким же образом скорость снижения тока вследствие более высокого напряжения фиксации на стороне соленоида, которая противоположна источнику электропитания. Эта разница в скоростях увеличения и снижения тока, вызванная высоким импедансом электропневматического преобразователя, создает асимметричное ограничение по управлению, поскольку, в условиях вычисления возрастания тока в блоке управления, высокие индукционные ограничения электропневматического преобразователя сдерживают скорость увеличения тока (то есть определяют предел нарастания), которая, в случае непринятия ее во внимание в процессе управления положением рабочего органа, осуществляемого электропневматическим преобразователем, приводит к несоответствию между вычисленной величиной тока в соленоиде, необходимой для управления положением рабочего органа, и фактической величиной тока в соленоиде. Это несоответствие или разница приводят к снижению точности управления положением, например, пневматического привода, подсоединенного к такому управляющему устройству, как клапан.
Приведенные в примере способы и устройство, описанные в данной работе, могут быть использованы для коррекции вышеупомянутого асимметричного регулирующего воздействия электропневматического регулятора за счет ограничения изменения величины запуска в блоке управления электропневматического регулятора, где изменение величины запуска соответствует изменению величины тока в соленоиде электропневматического регулятора. В частности, приведенные в примере способы и устройство, описанные в данной работе, могут быть реализованы получением управляющего сигнала и сигнала обратной связи, вычислением величины запуска на основании управляющего сигнала и сигнала обратной связи, вычислением предела нарастания и определением превышения разностью между величиной запуска и предыдущей величиной запуска вычисленного предела нарастания тока для электропневматического регулятора. После этого приведенный в примере способ и устройство могут изменять вычисленную величину запуска, основанную на вычисленном пределе нарастания.
Предел нарастания может быть предопределенной величиной, основанной на характеристиках и/или предельных величинах электропневматического регулятора, электропневматического преобразователя в составе электропневматического регулятора и/или управляющего устройства, подсоединенного к пневматическому приводу. Предел нарастания может быть взят отдельно значением или в качестве альтернативы - функцией вычисленной величины запуска. Кроме того, предел нарастания может быть функцией уровня помех (например, вычисленные помехи) электропневматического регулятора и/или сигнала обратной связи, и/или управляющего сигнала.
Способы и устройство, раскрытые в этой работе, как правило, имеют отношение к ограничению изменения величины запуска электропневматического регулятора. В то время как способы и устройство, раскрытые в этой работе, описаны в сочетании с примерами, включающими участие пневматически активируемого клапана, они могут быть реализованы с помощью клапанов, активируемых другим способом, и/или с помощью устройств управления рабочим процессом, отличных от других клапанов.
На ФИГ. 1 показана схема сборки регулирующего клапана 100, включающего клапанное управляющее устройство 102 (например, электропневматический регулятор) и клапан 104 (например, устройство управления рабочим процессом). Клапан 104 и клапанное управляющее устройство 102 могут быть физически и/или с помощью средств соединения связаны со сборкой приведенного в примере регулирующего клапана 100. В качестве альтернативы клапан 104 и клапанное управляющее устройство 102 могут быть отдельными компонентами, которые контактно и/или пневматически связаны друг с другом. В других примерах клапанное управляющее устройство 102 может быть подсоединено к одному или нескольким другим клапанам, и/или клапан 104 может быть подсоединен к одному или нескольких клапанным управляющим устройствам 102.
Сборка приведенного в примере регулирующего клапана 100 включает разъем 106, подсоединенный к клапанному управляющему устройству 102. Клапанное управляющее устройство 102 получает силовой и управляющий сигналы через разъем 106. Силовой и/или управляющий сигналы могут быть заведены на разъем 106 через канал связи 107. Питание может быть подано от внешнего источника, системы управления, генератора солнечной энергии, батареи и так далее. Кроме того, управляющие сигналы (например, входные сигналы) могут содержать, например, сигнал в 4-20 мА, сигнал в 0-10 В постоянного тока и/или цифровые управляющие сигналы и так далее. Клапанное управляющее устройство 102 может быть сконфигурировано на прием одного или нескольких управляющих сигналов, полученных от внешнего источника (например, от ведущей системы, расположенной в диспетчерской), с которым оно может поддерживать связь. Управляющие сигналы задаются или соответствуют состоянию клапана, например клапана 104. Например, управляющие сигналы могут вызывать открывание, закрывание или переход в некоторое промежуточное положение пневматического привода 105, подсоединенного к клапану 104.
Силовой и/или управляющий сигналы могут проходить по одному проводу в пределах канала связи 107, или в качестве альтернативы силовой и/или управляющий сигналы могут быть приняты на разъем 106 через многочисленные провода в составе канала связи 107. Например, в том случае, когда управляющий сигнал составляет 4-20 мА, для связи с клапанным управляющим устройством 102 можно использовать известный протокол предачи цифровых данных Дистанционного Преобразователя с Адресацией по Магистральному Каналу (HART). Такую связь для передачи цифровых данных можно использовать в общей системе управления рабочими процессами для извлечения из клапанного управляющего устройства 102 идентификационной информации, информации о статусе операций и диагностической информации. Например, в случае использования связи по протоколу HART и двухпроводной конфигурации канала, управляющий сигнал в виде цифровых данных комбинируется с силовым сигналом от клапанного управляющего устройства 102, поступающим через отдельную скрученную пару проводов. Силовой сигнал, подаваемый на клапанное управляющее устройство 102 и цифровые данные, накладываемые на аналоговый управляющий сигнал в 4-20 мА, могут быть переданы из ведущей системы, такой как, например, система, расположенная в диспетчерской, и отфильтрованы для разделения силового и управляющего сигналов. В качестве альтернативы или дополнительной возможности цифровая связь может быть использована для контроля или управления работой клапанного управляющего устройства 102 с целью исполнения им одной или нескольких управляющих функций.
В других примерах управляющим сигналом может быть сигнал в 0-10 В постоянного тока. Помимо этого, канал связи 107 может содержать отдельные силовые провода или линии электропередачи (например, 24 В постоянного тока или 24 В переменного тока) на подачи электропитания на клапанное управляющее устройство 102. В других примерах силовой и/или управляющий сигнал может разделять провода и/или линии электропередачи с сигналами цифровых данных. Например, двухпроводная конфигурация может быть реализована с помощью приведенного в примере регулирующего клапана 100, использующего цифровой протокол связи для промышленной шины, где передача цифровых данных комбинируется с силовым сигналом в двухпроводной конфигурации.
Помимо этого, разъем 106 может быть заменен или дополнен одним или несколькими беспроводными каналами связи. Например, клапанное управляющее устройство 102 может содержать один или несколько узлов приемопередатчиков для возможности клапанному управляющему устройству 102 обмениваться управляющей информацией (установочным значением (значениями), информацией о рабочем состоянии и т.д.) с общей системой управления рабочими процессами. В том случае, когда клапанное управляющее устройство 102 использует один или несколько приемопередатчиков, электропитание может быть подано на клапанное управляющее устройство через, например, провода, подсоединенные к местному или удаленному источнику питания.
Приведенный в примере клапан 104 включает седло клапана, определяющее положение измерительной диафрагмы, которая формирует перепускной канал для протекания потока текучей среды между впускным и выпускным отверстиями. Клапаном 104 может быть, например, поворотный клапан, клапан на четверть оборота, клапан с электроприводом, заслонка или другое управляющее устройство или блок. Пневматический привод 105, подсоединенный к клапану 104, во время работы подключается к элементу управления потоком текучей среды с помощью штока клапана, который передвигает элемент управления потоком текучей жидкости в первом направлении (например, в сторону от гнезда клапана) для придания возможности движения выше указанному потоку между впускным и выпускным отверстиями и во втором направлении (например, в направлении седла клапана) с целью ограничения протекания потока текучей среды между впускным и выпускным отверстиями.
Привод 105, подсоединенный к приведенному в примере клапану 104, может включать привод с поршнем двустороннего действия, мембрану с пружинным возвратом однократного действия или поршневой исполнительный механизм либо любой другой исполнительный привод или устройство управления рабочим процессом. Для управления скоростью прохождения потока текучей среды через клапан 104 последний охватывает систему датчиков сигналов обратной связи 111 (например, датчик положения, датчик давления, и/или передающее устройство сигнала положения), таких как, например, потенциометр, матрица магнитных датчиков и так далее. Система датчиков сигналов обратной связи 111 обнаруживает положение привода 105 и позиционирует элемент управления потоком текучей среды относительно гнезда клапана (например, в открытое положение, закрытое положение, промежуточное положение и так далее). Система датчиков сигналов обратной связи 111 конфигурируется для обеспечения подачи или генерирования сигнала обратной связи, такого как, например, механический сигнал, электрический сигнал и т.д., в клапанное управляющее устройство 102 посредством клапанного канала сигнала обратной связи 103. Сигнал обратной связи может отражать положение привода 105, подсоединенного к клапану 104, и, таким образом, положение самого клапана 104. Сигнал давления, поданный на привод 105, управляет положением клапана 104. Сигнал давления может включать сигналы выходных давлений 116 и 118.
Приведенное в примере клапанное управляющее устройство 102 из ФИГ.1 включает блок управления 108, ограничитель нарастания тока запуска электропневматического преобразователя 110, электропневматический преобразователь 112 и пневматическое реле 114. В других примерах клапанное управляющее устройство 102 может включать любые другие компоненты для контроля и/или подачи давления на исполнительный механизм клапана 105. В качестве дополнительной возможности или альтернативы, хотя и без отображения на фигурах, блок управления 108 и/или клапанное управляющее устройство 102 может охватывать другие компоненты обработки сигнала, такие как, например, аналого-цифровые преобразователи, фильтры (например, низкочастотные фильтры, высокочастотные фильтры и цифровые фильтры), усилители и так далее. Например, управляющий сигнал может быть отфильтрован (например, с помощью низко/высокочастотного фильтра) до обработки ограничителем нарастания тока запуска электропневматического преобразователя 110.
Приведенные в примере блок управления 108, ограничитель нарастания тока запуска электропневматического преобразователя 110, электропневматический преобразователь 112 и/или пневматическое реле 114 могут быть подсоединены друг к другу с помощью канала связи так, как показано, или иным другим подходящим образом. Приведенное в примере клапанное управляющее устройство 102 показано в виде электропневматического регулятора. Однако в других примерах клапанное управляющее устройство 102 может быть датчиком давления или любым другим подходящим регулирующим устройством или оборудованием, предназначенным для управления клапаном 104.
Блок управления 108 получает сигнал обратной связи, сгенерированный клапаном 104, через канал для передачи сигнала обратной связи о перемещении клапана 103, и управляющий сигнал, сгенерированный регулятором системы управления рабочими процессами. Блок управления 108 может использовать управляющий сигнал в качестве установочного или опорного сигнала, соответствующего требуемой работе (например, перемещению рабочего органа в положение, соответствующее проценту открывания/закрывания управляющего клапана 104) клапана 104. Блок управления 108 сравнивает этот сигнал обратной связи с управляющим или опорным сигналом посредством использования управляющего сигнала и сигнала обратной связи в качестве значений для алгоритма или процесса контроля положения рабочего органа с целью определения величины запуска (например, величины запуска электропневматического преобразователя), который необходимо подать на электропневматический преобразователь 112. Процесс управления положением рабочего органа, осуществляемый блоком управления 108, определяет (например, вычисляет) величину запуска, основанную на разности между сигналом обратной связи и управляющим сигналом. Эта вычисленная разность соответствует величине, на которую клапанное управляющее устройство 102 должно изменить положение привода 105, подсоединенного к клапану 104. Вычисленная величина запуска также соответствует току, сгенерированному блоком управления 108 для активации электропневматического преобразователя 112 на создание пневматического давления, которое должно быть подано на пневматическое реле 114. Ток может быть сгенерирован, например, одним или несколькими транзисторами, установленными в блоке управления 108. Вычисленная величина запуска (например, напряжение) может быть подана на транзистор, регулирующий протекание тока через транзисторы. Соленоид 113, установленный в электропневматическом преобразователе 112, подсоединяется к этому транзистору через канал связи 109 таким образом, чтобы через соленоид 113 и транзистор протекал ток одинаковой величины. Посредством этого величина запуска управляет величиной тока, протекающего через соленоид 113.
Величины запуска, которые увеличивают значение тока, генерируемого блоком управления 108, могут активировать пневматическое реле 114 с целью повышения значения пневматического давления, подаваемого на пневматический привод 105, для активации привода 105 на позиционирование клапана 104 в направлении закрытого положения. Аналогично этому величины запуска, которые уменьшают величину тока, сгенерированного блоком управления 108, могут вынудить пневматическое реле 114 уменьшить пневматическое давление, прилагаемое к пневматическому приводу 105 для его активации на позиционирование клапана 104 в направлении открытого положения. После вычисления величины запуска, приведенный в примере ограничитель нарастания тока запуска электропневматического преобразователя 110 определяет, посредством вычитания вычисленной величины запуска из предыдущей величины запуска, не превышает ли вычисленный сигнал запуска предел нарастания.
Разность между вычисленной и предыдущей величинами запуска является изменением величины запуска. Значительные изменения в вычисленной величине запуска в течение относительно небольших периодов времени приводят к возникновению ошибок управления положением рабочего органа в результате большего временного интервала, необходимого для повышения величины тока в пределах соленоида 113 электропневматического преобразователя 112 (например, в результате вышеотмеченного нарастания тока). Высокая индуктивность соленоида 113 и характеристики (например, выходной импеданс, напряжение и так далее) источника питания, подающего напряжение на соленоид, ограничивают увеличение тока в соленоиде 113 таким образом, чтобы в процессе управления рабочим органом, выполняемым блоком управления 108, можно было вычислить величины запуска и скорости увеличения тока в соленоиде 113, превышающие данный предел нарастания. Однако уменьшения величины тока не возникают подобно тому, как это происходит в результате высокой индуктивности соленоида 113 и/или характеристик источника питания. В результате на практике электропневматический преобразователь 112 может снизить фактическое значение тока так же быстро, как блок управления 108 - вычисленный ток.
Соленоид 113, расположенный внутри электропневматического преобразователя 112, использует ток запуска, сгенерированный блоком управления 108 для формирования магнитного поля. Это магнитное поле используется для управления дроссельной заслонкой, которая контролирует ограничение потока текучей среды через сливной наконечник. По мере увеличения тока запуска в соленоиде 113 магнитное поле, образованное соленоидом 113, увеличивается, вынуждая дроссельную заслонку отклоняться в направлении сливного наконечника. Дроссельная заслонка, отклоняемая в направлении сливного наконечника в соленоиде 113, приводит к повышению пневматического давления, образуемого электропневматическим преобразователем 112 и подаваемого на пневматическое реле 114. Например, электропневматический преобразователь 112 может быть сконфигурирован таким образом, чтобы ток запуска величиной 0,75 мА преобразовывался в давление 42 фунта на квадратный дюйм (PSI), ток запуска величиной 1,25 мА - в давление величиной 57 фунтов на квадратный дюйм.
Кроме того, поскольку электропневматический преобразователь 112 преобразует ток в пневматическое давление с помощью соленоида 113, ответное действие на подачу тока находит свое более точное отражение в среднем токе, проходящем через соленоид 113. Например, наиболее быстрые изменения фактического тока от 0.9 до 1.10 мА в течение определенного периода времени могут соответствовать протеканию через соленоид 113 среднего тока 1.0 мА. Таким образом, если для тока запуска используется напряжение затвора транзистора, необходимое для генерирования тока, изменяющегося между 0.9 и 1.1 мА, то через соленоид 113, расположенный в электропневматическом преобразователе 112, может проходить ток средней величины, равный 1.0 мА.
В тех случаях, когда в сигнале обратной связи и/или в управляющем сигнале присутствуют помехи, блок управления 108 может усилить некоторую часть этих помех во время вычисления величины запуска для процесса управления положением рабочего органа. Такое усиление помех может привести к вычислениям величин запуска, которые превышают предельные значения величины запуска. Если уровень помех превышает предельные значения величины запуска асимметричным образом (например, присутствие помех при средних смещениях постоянного тока), то среднее значение величин запуска выходного сигнала тока может отличаться от средней вычисленной величины запуска. Такая разность между фактической средней величиной запуска и вычисленной средней величиной также может привести к ошибке управления положением клапана 104.
Приведенный в примере ограничитель возрастания тока запуска электропневматического преобразователя 110 может скорректировать асимметрию от помех и/или асимметричные увеличения силы тока в соленоиде 113 электропневматического преобразователя 112 посредством сравнения изменения вычисленной величины запуска с пределом нарастания клапанного управляющего устройства 102. Предел нарастания может быть пределом изменения предопределенной величины запуска, установленной в ограничителе нарастания тока запуска электропневматического ограничителя 110. Предел нарастания может быть сконфигурирован или выставлен на основе увеличения максимальной силы фактического тока, достижимого в электропневматическом преобразователе 112. В качестве альтернативы предел нарастания может быть функцией вычисленного среднего значения тока запуска в соленоиде. Например, предел нарастания может основываться, по меньшей мере, на одном из следующего: на квадратичном соотношении, линейном соотношении, экспоненциальном соотношении, логарифмическом соотношении или на пошаговом соотношении с вычисленной средней величиной тока запуска. Кроме того, в других реализациях предел нарастания может основываться на предыдущей величине запуска, разности между величиной запуска и предыдущей величиной запуска, на управляющем сигнале, сигнале обратной связи, среднем вычисленном значении тока или на среднем значении фактического тока.
Приведенный в примере блок управления 108 из ФИГ.1 может контролировать уровень помех в сигнале обратной связи и/или в управляющем сигнале. Если блок управления 108 обнаруживает помехи выше предопределенного порогового значения, то блок управления 108 может реализовать предельную величину нарастания помех и/или отрегулировать ее с учетом уровня обнаруженных помех. В других примерах нарастания может включать коррекцию помех, основанную на измерениях среднего уровня помех в тех случаях, когда клапанное управляющее устройство 102 находится в тех или иных рабочих состояниях.
Если вычисленное изменение величины запуска выше предела нарастания, то ограничитель нарастания тока запуска электропневматического преобразователя 110 изменяет вычисленную величину запуска на величину, которая основана на пределе нарастания. Например, в тех случаях, когда вычисленная величина тока возрастает, а изменение величины запуска соответствует превышающему предел нарастания изменению тока в соленоиде 113, то ограничитель нарастания тока запуска электропневматического преобразователя 110 снижает величину запуска таким образом, чтобы разность между измененной величиной запуска и предыдущей величиной запуска привела к скорости увеличения тока в соленоиде 113, которая окажется меньше и/или равной пределу нарастания. Аналогично в тех случаях, когда вычисленное значение тока снижается, абсолютное значение изменения величины запуска может превысить предел нарастания. Если абсолютное значение изменения величины запуска превышает предел нарастания, то ограничитель нарастания тока запуска электропневматического преобразователя 110 может увеличить величину запуска с тем, чтобы изменение величины запуска соответствовало изменению тока, которое меньше и/или равно пределу нарастания.
После сравнения и/или увеличения величины запуска, основанного на пределе нарастания, блок управления 108 преобразует величину запуска в сигнал запуска (например, в ток, проходящий через транзистор) и подает его на соленоид 113, расположенный в электропневматическом преобразователе 112, через канал связи 109. Величина тока соответствует величине запуска. Электропневматический преобразователь 112 может быть измерительным преобразователем типа «ток-давление», в котором сигнал запуска является током, который изменяется, например, с помощью тиристора, установленного в блоке управления 108, для достижения требуемого состояния (например, положения) клапана 104. В качестве альтернативы электропневматический преобразователь 112 может быть измерительным преобразователем типа «ток-давление», в котором сигнал запуска является напряжением, которое изменяется для обеспечения изменения выходного давления, с целью управления клапаном 104. Электропневматический преобразователь 112 подсоединяется к источнику подачи давления 120 (например, к источнику подачи сжатого воздуха) посредством канала текучей среды и преобразует сигнал запуска, поступающий из блока управления 108, в сигнал давления, используя давление сжатой текучей среды (например, сжатого воздуха, гидравлической жидкости и т.д.), поступающей из источника подачи давления. Электропневматический преобразователь 112 конфигурируется под подачу сигнала давления на пневматическое реле 114.
На ФИГ.2 показана блок-схема 200 блока управления 108 и приведенного в примере ограничителя нарастания тока запуска для электропневматического преобразователя 110 из ФИГ.1. Для получения управляющих сигналов из системы управления рабочим процессом через канал связи 107, приведенный в примере блок управления 108 содержит устройство приема входного сигнала 202. Устройство приема входного сигнала 202 получает электрические управляющие сигналы и преобразует их в цифровую информацию для последующей обработки. Электрические сигналы могут включать аналоговую, дискретную и/или цифровую информацию, направляемую из системы управления рабочим процессом.
Кроме того, устройство приема входного сигнала 202 может быть реализовано с помощью протокола Дистанционного Преобразователя с Адресацией по Магистральному Каналу (HART), предназначенного для организации связи системы управления рабочим процессом с блоком управления 108. Кроме того, приведенное в примере устройство приема входного сигнала 202 может отфильтровать из управляющих сигналов любую электромагнитную помеху, связанную с производственной средой. После получения и/или обработки управляющего сигнала устройство приема входного сигнала 202 пересылает управляющий сигнал и/или данные управляющего сигнала в детектор помех 206.
Для приема сигналов обратной связи, вызванных перемещением клапана, через канал связи 103, предназначенный для сигналов обратной связи, вызванных перемещением клапана, приведенный в примере блок управления 108 содержит устройство приема сигналов обратной связи 204. Устройство приема сигналов обратной связи 204 может включать интерфейс с датчиком положения рабочего органа для обработки сигналов положения, поступающих из клапана 104 на ФИГ. 1. Кроме того, приведенное в примере устройство приема сигналов обратной связи 204 может содержать интерфейс с датчиком давления для приема сигналов давления от клапана 104. Устройство приема сигналов обратной связи 204 может быть реализовано с помощью протокола HART для установления связи между клапаном 104 и блоком управления 108. Кроме того, приведенное в примере устройство приема сигналов обратной связи 204 может отфильтровать любую электромагнитную помеху, связанную с производственной средой, из сигналов обратной связи (например, из сигнала давления и/или положения рабочего органа). После получения и/или обработки сигнала обратной связи устройство приема сигналов обратной связи 204 пересылает управляющий сигнал и/или данные управляющего сигнала в детектор помех 206.
Для обнаружения помех в управляющем сигнале или в сигнале обратной связи приведенный в примере блок управления 108 из ФИГ.2 содержит детектор помех 206. Кроме того, в самом блоке управления 108 детектор помех 206 может обнаруживать помехи, наведенные внешними источниками окружающей среды и/или внутренними компонентами, расположенными в блоке управления 108 (например, в микропроцессоре 210). В других примерах, где предел нарастания не базируется на уровне помех, приведенный в примере блок управления 108 может не содержать детектора помех 206.
Приведенный в примере детектор помех 206 определяет их присутствие в управляющем сигнале или в сигнале обратной связи с помощью выявления превышения порогового уровня помех амплитудой или средним значением помех. Пороговый уровень помех может быть определен регулятором системы управления рабочим процессом и/или может быть вычислен в разных рабочих условиях на основании функционирования клапанного управляющего устройства 102. После определения присутствия помех в управляющем сигнале и/или в сигнале обратной связи детектор помех 206 направляет управляющий сигнал и/или сигнал обратной связи в процессор управления положением рабочего органа 208. Кроме того, если детектор помех 206 определяет их присутствие в управляющем сигнале и/или сигнале обратной связи, детектор помех 206 передает сообщение об этом в процессор управления положением рабочего органа 208. Сообщение может содержать указание о том, что помехи в управляющем сигнале и/или в сигнале обратной связи превышают их пороговый уровень. Кроме того, сообщение может содержать приблизительное значение величины, на которую помехи превышают их пороговые уровни, указание на сигнал, содержащий помехи, частотные составляющие помехи и/или другую релевантную информацию о помехах.
Для выполнения алгоритма управления позиционированием или процесса вычисления величин запуска электропневматического преобразователя приведенный в примере блок управления 108 содержит процессор управления положением рабочего органа 208 (например, процессор управления сервомеханизмом). Процессор управления положением рабочего органа 208 принимает сигнал обратной связи и управляющий сигнал через детектор помех 206. Процессор управления положением рабочего органа 208 может содержать сервомеханизм управления таким положением и сервомеханизм управления давлением для вычисления величины запуска электропневматического преобразователя на основании сигнала обратной связи, включающего сигнал позиционирования, сигнала давления и управляющего сигнала.
Приведенный в примере процессор управления положением рабочего органа 208 может реализовываться сервомеханизмом управления положением рабочего органа или сервомеханизмом управления давлением с помощью пропорционального, интегрального и дифференциального регулирования (PID) по сигналу обратной связи, основанного на значениях сигнала обратной связи и управляющего сигнала. Например, PID-регулирование может производить сравнение между управляющим сигналом и сигналом обратной связи для получения сигнала ошибки (например, в виде разности между сигналом обратной связи и управляющим сигналом). Этот сигнал ошибки обрабатывается в пропорциональном регуляторе, содержащем усилитель с коэффициентом усиления, установленным или настроенным соответствующим образом для формирования сигнала, пропорционального сигналу ошибки. Коэффициент усиления каждого соответствующего модуля управления сервомеханизмом может различаться, базируясь на разном характере сигнала обратной связи и других аспектов схемы управления по сигналу обратной связи.
Помимо того, процессор управления положением рабочего органа 208 может содержать усилитель с коэффициентом усиления, который формирует сигнал ошибки для регистра-накопителя, в котором выполняется интегрирование ошибки во времени. Регистр-накопитель, в свою очередь, содержит сумматор и элемент задержки, который хранит предыдущую полученную после интегрирования величину и возвращает ее обратно в сумматор. Сигналы, генерируемые пропорциональными и интегральными регуляторами, передаются вместе с сигналом, сгенерированным дифференциальным регулятором, в сумматор для получения величины запуска, направляемой в ограничитель нарастания тока запуска электропневматического преобразователя 110. Каждый дифференциальный регулятор содержит устройство выполнения дифференцирования, которое генерирует значение производной по времени для сигнала обратной связи, и усилитель с соответствующим коэффициентом усиления. Кроме того, процессор управления положением рабочего органа 208 с помощью микропроцессора 210 может хранить каждую вычисленную величину запуска электропневматического преобразователя в памяти 214. Помимо того, после вычисления величины запуска электропневматического преобразователя процессор управления положением рабочего органа 208 передает величину запуска электропневматического преобразователя на ограничитель нарастания тока запуска электропневматического преобразователя 110.
Для ограничения изменения величины запуска электропневматического преобразователя приведенный в примере блок управления 108 содержит ограничитель нарастания тока запуска электропневматического преобразователя 110. Ограничитель нарастания тока запуска электропневматического преобразователя 110 принимает величину запуска электропневматического преобразователя от процессора управления положением рабочего органа 208. После этого ограничитель нарастания тока запуска электропневматического преобразователя 110 вычисляет разность между величиной запуска электропневматического преобразователя и предыдущей величиной запуска электропневматического преобразователя. Эта разность является значением изменения величины запуска электропневматического преобразователя. Ограничитель нарастания тока запуска электропневматического преобразователя 110 может получить предыдущую величину запуска электропневматического преобразователя, обратившись к памяти 214. Предыдущей величиной запуска электропневматического преобразователя является самая ранняя величина запуска электропневматического преобразователя, переданная на электропневматический преобразователь 112.
После этого ограничитель нарастания тока запуска электропневматического преобразователя 110 определяет наличие превышения предела нарастания, связанного с электропневматическим преобразователем 112, абсолютной величиной изменения величины запуска для электропневматического преобразователя. Если абсолютная величина изменения величины запуска для электропневматического преобразователя превышает предел нарастания, то ограничитель нарастания тока запуска электропневматического преобразователя 110 уменьшает или увеличивает величину запуска электропневматического преобразователя так, чтобы изменение величины запуска электропневматического преобразователя соответствовало изменению тока в соленоиде 113, равному или меньшему пределу нарастания. После изменения величины запуска электропневматического преобразователя или определения отсутствия необходимости в таком изменении ограничитель нарастания тока запуска электропневматического преобразователя 110 передает величину запуска электропневматического преобразователя в процессор управления положением рабочего органа 208 для ее последующей пересылки в генератор тока запуска электропневматического преобразователя 216.
В том случае, когда предел нарастания основан на вычисленном среднем значении тока, ограничитель нарастания тока запуска электропневматического преобразователя 110 вычисляет предел нарастания до сравнения изменения величины запуска электропневматического преобразователя с пределом нарастания. Например, предел нарастания может основываться, как минимум, на одном из следующего: на квадратичном соотношении, линейном соотношении, экспоненциальном соотношении, логарифмическом соотношении или на пошаговом соотношении с вычисленной средней величиной тока запуска электропневматического преобразователя. Кроме того, в других реализациях предел нарастания может основываться на предыдущей величине запуска, разности между величиной запуска и предыдущей величиной запуска, управляющем сигнале, сигнале обратной связи, среднем вычисленном значении тока или на среднем значении фактического тока. В других случаях предел нарастания может быть основан на измеренном наборе максимальных значений изменения тока соленоида 113 в электропневматическом преобразователе 112. Предел нарастания и/или функция, связывающая предел нарастания со средним значением тока запуска, может храниться в ограничителе нарастания тока запуска электропневматического преобразователя 110 или, как альтернатива, в памяти 214.
Помимо этого, если ограничитель нарастания тока запуска электропневматического преобразователя 110 получает сообщение, формируемое детектором помех 206 и указывающее на то, что сигнал обратной связи и/или управляющий сигнал содержит помехи, то ограничитель нарастания тока запуска электропневматического преобразователя 110 может вычислить предельное значение нарастания помех и/или использовать его в вычисленной величине запуска электропневматического преобразователя. Предел нарастания помех может быть предопределен характером помех в управляющем сигнале и/или в сигнале обратной связи во время разных условий работы клапанного управляющего устройства 104. Предел нарастания помех может быть отдельной величиной или, как альтернатива, основан на величине помех управляющего сигнала и/или сигнала обратной связи. Кроме этого предел нарастания помех может храниться в ограничителе нарастания тока запуска электропневматического преобразователя 110 или в памяти 214.
Для генерирования тока запуска на основе величины запуска электропневматического преобразователя (например, напряжения), приведенный в качестве примера блок управления 108 из ФИГ.2 содержит генератор тока запуска электропневматического преобразователя 216. Приведенный в примере генератор тока запуска электропневматического преобразователя 216 получает сигнал ограниченной по нарастанию величины запуска из процессора управления положением рабочего органа 208. После получения величины запуска электропневматического преобразователя генератор тока запуска электропневматического преобразователя 216 генерирует ток величиной, соответствующей величине запуска электропневматического преобразователя. Генератор тока запуска электропневматического преобразователя 216 может генерировать ток, используя для этого транзистор, источник тока, цифроаналоговый преобразователь (DAC) и/или любую другую составляющую, способную генерировать регулируемый сигнал тока. После генерирования тока запуска генератор тока запуска электропневматического преобразователя 216 через канал связи 109 активирует протекание тока запуска в соленоиде 113 преобразователя 112. Например, генератор тока запуска электропневматического преобразователя 216 может содержать транзистор, который управляется с помощью величины запуска. По мере подачи величины запуска на транзистор, ток запуска, основанный на прилагаемом напряжении величины запуска, протекает через транзистор и соленоид 113. Как альтернатива, в примерах, где электропневматический преобразователь 112 требует подачи сигнала напряжения, генератор тока запуска электропневматического преобразователя 216 может содержать составляющие для генерирования напряжения, включая информацию, полученную на основе величины запуска электропневматического преобразователя.
Для управления диагностикой, передачей сигналов и другими общими функциональными возможностями управления, приведенный в примере блок управления 108 содержит микропроцессор 210. Приведенный в примере микропроцессор 210 может быть реализован на любом типе микропроцессора, микроконтроллера, управляющей логики, процессора цифровой обработки сигналов, интегральной схемы специального применения и/или на любом другом типе компонента, способного осуществлять контроль работы блока управления 108.
Приведенный в примере микропроцессор 210 принимает от процессора управления положением рабочего органа 208 сигналы ограниченных по нарастанию величин запуска электропневматического преобразователя и сохраняет их в памяти 214. Помимо этого микропроцессор 210 обрабатывает любые коммуникационные сообщения, пересланные из системы управления рабочим процессом в блок управления 108 через канал связи 107. В этих коммуникационных сообщениях может запрашиваться рабочий статус блока управления 108, диагностическая информация блока управления 108, вычисленные величины запуска электропневматического преобразователя, фактические величины запуска электропневматического преобразователя, информация о среднем токе запуска, информация об уровне помех и/или любая другая информация о функционировании преобразователя. После получения коммуникационного сообщения микропроцессор 210 генерирует соответствующее ответное действие и пересылает его в устройство передачи выходного сигнала 212.
Приведенный в примере микропроцессор 210 может контролировать выполнение функций в пределах блока управления 108 и обеспечивать любые обновления статуса этих функций для системы управления рабочим процессом. Например, микропроцессор 210 может контролировать рабочий процесс управления положением рабочего органа в процессоре управления положением рабочего органа 208 для верификации корректности такого процесса. В другом примере микропроцессор 210 может контролировать появление значительных уровней помех в сигнале обратной связи или в управляющем сигнале. Еще в одном примере микропроцессор 210 может определять факт неполучения управляющих сигналов и/или сигналов обратной связи блоком управления 108. Помимо этого, микропроцессор 210 может контролировать функционирование ограничителя нарастания тока запуска для электропневматического преобразователя 110 в случае каких-либо отклонений от наложения предела нарастания на вычисленную величину запуска электропневматического преобразователя. И далее, микропроцессор 210 может контролировать функционирование генератора тока запуска электропневматического преобразователя 216 для определения генерирования вероятного избыточного тока, возникающего при условиях возможного короткого замыкания в электропневматическом преобразователе 112.
Для передачи сообщений, исходящих из микропроцессора 210, приведенный в примере блок управления 108 содержит устройство передачи выходного сигнала 212. Приведенное в примере устройство передачи выходного сигнала 212 преобразует сообщения из микропроцессора 210 в аналоговый и/или цифровой формат для передачи его в систему управления рабочим процессом через канал связи 107. Устройство передачи выходного сигнала 212 может форматировать данные, совместимые с Ethernet, универсальной последовательной шиной (USB), каналом стандарта IEEE (Институт инженеров по электротехнике и электронике) 1394 и так далее. В качестве альтернативы устройство передачи выходного сигнала 212 может беспроводным способом связываться с системой управления рабочим процессом, используя среду беспроводной связи (например, беспроводные Ethernet, IEEE-802.11, Wi-Fi®, Bluetooth® и т.д.).
Для хранения вычисленных величин запуска электропневматического преобразователя, ограниченных по нарастанию величин запуска электропневматического преобразователя, пределов нарастания, пределов нарастания уровня помех и функций предела нарастания блок управления 108 из ФИГ.2 содержит память 214. Приведенная в примере память может быть реализована на базе EEPROM (электронно-перепрограммируемой постоянной памяти), RAM (оперативной памяти), ROM (постоянной памяти) и/или на базе любого другого типа памяти. Через канал связи 220 память 214 напрямую подсоединена к системе управления рабочим процессом. Оператор системы управления рабочим процессом может хранить пределы нарастания и/или функции, описывающие пределы нарастания, в памяти, передавая их туда через канал 220. Кроме того, оператор может модифицировать и/или изменять пределы нарастания и/или функции, описывающие пределы нарастания, которые хранятся в памяти 214.
В то время как приведенный в примере способ реализации блока управления 108 представлен на ФИГ.2, один или несколько интерфейсов, структур данных, элементов, процессов и/или устройств, проиллюстрированных на ФИГ.2, могут быть скомбинированы, разделены, перестроены, пропущены, устранены и/или реализованы любым другим способом. Например, приведенные в примере устройство приема входных сигналов 202, устройство приема сигналов обратной связи 204, детектор помех 206, процессор управления положением рабочего органа 208, микропроцессор 210, устройство передачи выходного сигнала 212, ограничитель нарастания тока для запуска электропневматического преобразователя 110, и/или генератор тока запуска электропневматического преобразователя 216, показанные на ФИГ.2, могут быть реализованы отдельно и/или в любой комбинации, используя, например, извлекаемые или считываемые машинным способом инструкции, выполняемые одним или несколькими вычислительными устройствами и/или вычислительными платформами (например, платформа обработки данных 810 из ФИГ.8).
В дальнейшем, приведенные в примере устройство приема входных сигналов 202, устройство приема сигналов обратной связи 204, детектор помех 206, процессор управления положением рабочего органа 208, микропроцессор 210, устройство передачи выходного сигнала 212, ограничитель нарастания тока для запуска электропневматического преобразователя 110 и/или генератор тока запуска электропневматического преобразователя 216 и/или в более общем случае блок управления 108 могут быть реализованы с помощью аппаратного обеспечения, программного обеспечения, программно-аппаратного обеспечения и/или посредством любой комбинации аппаратного, программного и/или программно-аппаратного обеспечении. Таким образом, любое из устройств приведенных в примере, а именно: устройство приема входных сигналов 202, устройство приема сигналов обратной связи 204, детектор помех 206, процессор управления положением рабочего органа 208, микропроцессор 210, устройство передачи выходного сигнала 212, ограничитель нарастания тока для запуска электропневматического преобразователя 110 и/или генератор тока запуска электропневматического преобразователя 216 и/или в более общем случае блок управления 108 могут быть реализованы на одной схеме или на нескольких схемах, на программируемом процессоре (процессорах), на специальной прикладной интегральной схеме (ASIC), на устройстве (устройствах) программируемой логики (PLD) и/или на логическом устройстве (устройствах), программируемых пользователем (FPLD), и т.д.
На ФИГ.3А показан график 300 вычисленного значения тока запуска электропневматического преобразователя 302 и фактического тока запуска электропневматического преобразователя 304 клапанного управляющего устройства 102 из ФИГ. 1 без приведенного в примере ограничителя нарастания тока для запуска электропневматического преобразователя 110 из ФИГ.1 и 2. График тока запуска 300 содержит ось Х в масштабе времени и ось Y в масштабе тока. Ось времени может быть отмасштабирована в минутах, секундах, миллисекундах, микросекундах, наносекундах и так далее. Ось тока может быть отмасштабирована в амперах, миллиамперах, микроамперах, наноамперах и так далее. Помимо этого, в других примерах, где блок управления 108 генерирует напряжение запуска, ось Y может содержать напряжение. В примерах клапанного управляющего устройства 102 из ФИГ.1 график тока запуска 300 из ФИГ.3 включает время TI, равное 100 миллисекундам, время Т5, равное 1500 миллисекундам, ток 11, равный 0,8 миллиамперам, и ток 14, равный 1,20 миллиамперам.
На приведенном в примере графике 300 токов запуска показаны изменяющиеся во времени вычисленный ток запуска электропневматического преобразователя 302 и фактический ток запуска электропневматического преобразователя 304. Вычисленный ток запуска электропневматического преобразователя 302 соответствует вычисленной величине запуска электропневматического преобразователя в блоке управления 108. Фактический ток запуска электропневматического преобразователя 304 - это ток, подаваемый на электропневматический преобразователь 112. Для ясности вычисленный ток запуска электропневматического преобразователя 302 и фактический ток запуска электропневматического преобразователя 304 для проведения между ними различия в некоторых примерах показаны как расположенные рядом друг с другом. В этих примерах токи запуска электропневматического преобразователя 302 и 304 должны накладываться друг на друга.
На графике токов запуска 300 показано, что вычисленный ток запуска электропневматического преобразователя 302 возникает при токе I1. В момент времени TI блок управления увеличивает вычисленный ток запуска электропневматического преобразователя 302 до тех пор, пока вычисленный ток запуска электропневматического преобразователя 302 не достигнет тока 14. С момента времени Т2 до момента времени Т3 блок управления 108 поддерживает значение вычисленного тока запуска электропневматического преобразователя 302 на уровне I4. Затем в момент времени Т4 блок управления 108 уменьшает вычисленный ток запуска электропневматического преобразователя 302 до тех пор, пока он не достигнет тока I1 в момент времени Т5. Однако пока блок управления 108 вычисляет ток запуска электропневматического преобразователя через электропневматический преобразователь 112 проходит фактический ток, показанный как фактический ток запуска электропневматического преобразователя 304. В момент времени TI электропневматический преобразователь 112 не в состоянии увеличивать свой ток с такой же скоростью, как и вычисленный ток запуска электропневматического преобразователя 302. В связи с тем, что в этом примере блок управления 108 не содержит ограничитель нарастания тока запуска электропневматического преобразователя 110, вычисленный ток запуска электропневматического преобразователя 302 не ограничивается предельными значениями максимального увеличения тока (то есть пределом нарастания) в электропневматическом преобразователе 112. В результате фактический ток запуска электропневматического преобразователя 304 возрастает с меньшей скоростью и не достигает тока 14 до момента времени Т3, который наступает после момента времени Т2. Разность между токами запуска электропневматического преобразователя 302 и 304 в период Т1-Т3 может привести к ошибке управления позиционированием привода, подсоединенного к клапану 104 из ФИГ.1. Также из-за индуктивности соленоида 113 электропневматическом преобразователя 112 последний не ограничивает таким же способом скорость уменьшения фактического тока запуска электропневматического преобразователя 304, и фактический ток запуска электропневматического преобразователя 304 соответствует вычисленному току запуска электропневматического преобразователя 302 между моментами времени Т4 и Т5.
Кроме того, на приведенном в примере графике токов запуска 300 показаны средние значения токов запуска 306 и 308 для соответствующих токов запуска электропневматического преобразователя 302 и 304. Вычисленный средний ток запуска 306 соответствует вычисленному току запуска электропневматического преобразователя 302, а фактический средний ток запуска 308 соответствует фактическому току запуска электропневматического преобразователя 304. Средние токи запуска 306 и 308 показаны в виде прямых линий, потому что они усредняются на протяжении более продолжительного периода времени, чем тот, который показан на графике тока запуска 300. Фактический средний ток запуска 308 содержит ток I2, тогда как вычисленный средний ток запуска 306 содержит 13. Фактический средний ток запуска 308 ниже вычисленного среднего тока запуска 306 из-за того, что фактический ток запуска электропневматического преобразователя 304 ограничен по скорости нарастания выходного напряжения и требует больше времени (например, Т3-Т2) для достижения значения тока 14.
На ФИГ.3В показан график токов запуска 350 для вычисленного значения тока запуска электропневматического преобразователя 352 и фактического тока запуска электропневматического преобразователя 354 для цифрового клапанного управляющего устройства 102, включая приведенный в примере ограничитель нарастания тока запуска электропневматического преобразователя 110 из ФИГ.1 и 2. График токов запуска 350 аналогичен графику токов запуска 300 из ФИГ.3А за исключением того, что вычисленный ток запуска электропневматического преобразователя 352 ограничивается на основе предела нарастания. В графике токов запуска 350 из ФИГ.3В, ограничитель нарастания тока запуска электропневматического преобразователя 110 включает установку предела нарастания, которая соответствует максимальному достижимому увеличению интенсивности возрастания тока в электропневматическом преобразователе 112, как показано в случае фактического тока запуска электропневматического преобразователя 304 в течение времени Т2-Т3 из ФИГ. 3А.
В результате наличия предела нарастания, используемого в ограничителе нарастания тока запуска электропневматического преобразователя 110, вычисленный ток запуска электропневматического преобразователя 352 ограничен по скорости нарастания, основанной на максимальном достижимом возрастании тока в электропневматическом преобразователе 112. Таким образом, фактический ток запуска электропневматического преобразователя 354 соответствует вычисленному току запуска электропневматического преобразователя 352 в течение всех периодов времени от T1 до Т5. Предел нарастания также применяется для снижения тока запуска электропневматического преобразователя в течение периода времени Т4-Т5 для обеспечения симметричного регулирования тока запуска электропневматического преобразователя. Соответствие между фактическим током запуска электропневматического преобразователя 354 и вычисленным током запуска электропневматического преобразователя 352 и симметричное регулирование обеспечивают точное управление позиционированием привода, подсоединенного к клапану 104 из ФИГ.1.
Помимо этого, график токов запуска 350 из ФИГ.3В включает вычисленный средний ток запуска 356, соответствующий вычисленному току запуска электропневматического преобразователя 352, а фактический средний ток запуска 358 - фактическому току запуска электропневматического преобразователя 354. Вследствие того, что вычисленный и фактический токи запуска электропневматического преобразователя 352 и 354 согласованы и в основном равны, согласованы и в основном равны вычисленный и фактический средний токи запуска 356 и 358.
На ФИГ. 4А и 4В показаны графики пределов нарастания 400 и 425, основанные на средних значениях тока запуска электропневматического преобразователя. На оси Х графиков предела нарастания 400 и 425 показан средний ток запуска. Ток запуска может быть отмасштабирован в амперах, миллиамперах, микроамперах, наноамперах и т.д. Кроме того, на оси Y графиков пределов нарастания 400 и 425 показаны изменения величины запуска для электропневматического преобразователя. Изменение величины запуска электропневматического преобразователя может быть отмасштабировано в амперах/секунда, миллиамперах/секунда, миллиамперах/миллисекунда и так далее. Изменение величины запуска для электропневматического преобразователя равняется разности между текущей и предыдущей величиной запуска электропневматического преобразователя (например, скорость изменения текущей величины запуска по сравнению с предыдущей величиной запуска электропневматического преобразователя). Кроме того, на графиках предела нарастания 400 и 425 показаны пределы нарастания 402 и 426 для двунаправленных изменений величины запуска электропневматического преобразователя.
На графике предела нарастания 400 из ФИГ. 4А показан предел нарастания 402 для изменения величины запуска электропневматического преобразователя DI при использовании любого значения тока запуска от СI до С2. Предел нарастания 402 может быть вычисленным максимальным изменением тока запуска электропневматического преобразователя 112. Кроме того, этот предел нарастания 402 может быть определен с помощью приведенного в примере способа 500 из ФИГ.5. В примере из ФИГ.4А вычисленное изменение величины запуска электропневматического преобразователя 404 превышает предел нарастания 402. Ограничитель нарастания тока запуска для электропневматического преобразователя 110 меняет вычисленное изменение величины запуска электропневматического преобразователя 404 за счет его снижения до величины изменения запуска электропневматического преобразователя 406 в пределе нарастания. В других примерах величина запуска электропневматического преобразователя 404 может быть снижена ниже предела нарастания 402.
На графике предела нарастания 425 из ФИГ.4В показан предел нарастания 426, который основан на среднем значении тока запуска. В этом примере предел нарастания линейно уменьшается от D2 до DI по мере увеличения среднего значения тока запуска от С1 до С2. Это линейное уменьшение может быть результатом максимального изменения тока в электропневматическом преобразователе 112. Например, по мере приближения среднего значения тока электропневматического преобразователя 112 к значению тока питания, подаваемого на электропневматический преобразователь 112, максимальный ток уменьшается. В других примерах предел нарастания 426 может описываться квадратичным соотношением, линейным соотношением, экспоненциальным соотношением, логарифмическим соотношением или пошаговым соотношением со средней величиной тока запуска. Кроме того, предел нарастания может основываться на вычисленной величине запуска, предыдущей величине запуска, разности между величиной запуска и предыдущей величиной запуска, управляющем сигнале, сигнале обратной связи, среднем вычисленном значении тока и/или на среднем значении фактического тока. И еще в других примерах предел нарастания 426 может основываться на уровне помех в сигнале обратной связи и/или в управляющем сигнале.
На приведенном в примере графике предела нарастания 425 вычисленное изменение в величине запуска электропневматического преобразователя 428 превышает предел нарастания 426. Ограничитель нарастания тока запуска электропневматического преобразователя 110 снижает вычисленное изменение величины запуска электропневматического преобразователя 428 на отрегулированное изменение величины запуска электропневматического преобразователя 430 в пределе нарастания 426. В этом примере вычисленное изменение величины запуска электропневматического преобразователя 428 происходит при среднем значении тока С3. Это среднее значение тока С3 может быть средним значением тока при вычисленном изменении величины запуска электропневматического преобразователя 428 или при изменении величины запуска электропневматического преобразователя 430. В качестве альтернативы среднее значение тока запуска С3 может соответствовать фактическому среднему значению тока запуска до принятия во внимание вычисленной величины запуска электропневматического преобразователя, соответствующей вычисленному изменению величины запуска электропневматического преобразователя 428.
На ФИГ.5, 6 и 7 показаны блок-схемы приведенных в примере способов, которые могут быть применены для реализации приведенных в примере цифрового клапанного управляющего устройства 104, печатной платы 108, ограничителя нарастания тока запуска электропневматического преобразователя 110, детектора помех 206, процессора управления сервомеханизмом 208 и/или микропроцессора 210 из ФИГ.1 и/или ФИГ.2. Приведенные в примере способы из ФИГ. 5, 6 и 7 могут быть реализованы в процессоре, регуляторе или в любом другом подходящем обрабатывающем устройстве. Например, приведенные в примере способы из ФИГ. 5, 6 и 7 могут быть воплощены в закодированных инструкциях, хранимых на любом материальном и машинно-читаемом носителе, таком как флэш-память, компакт-диск, цифровой видеодиск, гибкий диск, ПЗУ, ОЗУ, программируемое ПЗУ (PROM), стираемое программируемое ПЗУ (EPROM), электронно-стираемое ППЗУ (EEPROM), диск оптической памяти, устройство оптической памяти, диск магнитной памяти, устройство магнитной памяти и/или любой другой носитель, который может быть использовать для переноса или хранения программного кода и/или инструкций в форме способов или структур данных и может быть доступным для обращения к процессору, компьютеру общего или специального назначения или к другому устройству, оборудованному процессором (например, процессорной платформе 810, обсуждаемой ниже при рассмотрении ФИГ.8). Вышеуказанные комбинации также включены в номенклатуру машиночитаемых носителей. Например, способы охватывают инструкции и/или данные, которые задают функционирование процессора, компьютера общего назначения, компьютера специального назначения или обрабатывающего устройства специального назначения, предназначенные для реализации одного или нескольких особых способов. Как альтернатива, приведенные в примере способы из ФИГ. 5, 6 и 7 могут быть реализованы с использованием любой комбинации ASIC, PLD, FPLD, дискретной логики, аппаратного и программно-аппаратного обеспечения и так далее. Также некоторые или все приведенные в примере способы из ФИГ.5, 6 и 7 вместо этого могут быть реализованы, используя ручные операции, или в виде любой комбинации каких-либо способов, например, любой комбинации программно-аппаратного обеспечения, программного обеспечения, дискретной логики и/или аппаратного обеспечения. В дальнейшем могут быть задействованы многие другие способы реализации приведенных в примере операций из ФИГ. 5, 6 и 7. Например, может быть изменен порядок исполнения блоков, и/или один или несколько описанных блоков могут быть изменены, устранены, подразделены или объединены. В дополнение к этому любой или все приведенные в примере способы из ФИГ.5, 6 и 7 могут быть применены последовательно и/или параллельно, например, с помощью отдельных цепочек выполняемых задач обработки данных, процессоров, устройств, дискретной логики, схем и т.д.
Приведенный в примере способ 500 из ФИГ.5 определяет предел нарастания для ограничителя нарастания тока запуска электропневматического преобразователя 110 из ФИГ. 1. Приведенный в примере способ 500 из ФИГ. 5 вычисляет предел нарастания в рабочих условиях для отдельного набора клапанного управляющего устройства 102. Другие приведенные в примере способы 500 могут быть реализованы для определения пределов нарастания в других рабочих условиях клапанного управляющего устройства 102. Кроме того, один или несколько пределов нарастания, вычисленных с помощью приведенного в примере способа 500, могут быть объединены для формирования взаимосвязи величины предела нарастания и условий работы клапанного управляющего устройства 102. Помимо этого, приведенный в примере способ 500 может быть использован для определения функциональной взаимосвязи между пределом нарастания и фактическим током, подаваемым на электропневматический преобразователь 112.
Приведенный в примере способ 500 начинает работать, когда сборка регулирующего клапана 100 активируется, и выполняется измерение индуктивности соленоида 113 в электропневматическом преобразователе 112 (блок 502). После этого на основании измеренной индуктивности и характеристик источника питания, подаваемого на электропневматический преобразователь 112 (блок 504), вычисляется предел нарастания. В других примерах предел нарастания может быть вычислен на основании изменения скорости фактического максимального тока в электропневматическом преобразователе 112. А еще в других примерах предел нарастания может быть вычислен как функция изменения скорости максимального тока в электропневматическом преобразователе 112 для различных средних значений тока запуска.
После вычисления предела нарастания (блок 504) измеряется уровень помех сигнала обратной связи о перемещении клапана (блок 506). Затем измеряются помехи в управляющем сигнале (блок 508), и регистрируется рабочая точка клапанного управляющего устройства 102 (блок 510). Помимо этого, можно измерить уровень помех в клапанном управляющем устройстве 102, блоке управления 108 и/или на разъеме 106. В некоторых приведенных в примерах реализациях вычисление предела нарастания (блок 504) и измерение уровня помех в сигнале обратной связи и в управляющем сигнале (блоки 506 и 508) может быть повторено в различных рабочих точках клапанного управляющего устройства 102 (блок 510) или, как альтернатива, проводиться через постоянные интервалы времени, включая, например, каждый случай измерения сигнала обратной связи и управляющего сигнала.
Приведенный в примере способ 500 из ФИГ. 5 продолжает применяться, когда выполняется вычисление нового предела нарастания или регулировка предыдущего предела нарастания на основании измеренных помех в рабочей точке клапанного управляющего устройства 102 (блок 512). В тех случаях, когда клапанное управляющее устройство 102 обнаруживает помехи в управляющем сигнале и/или в сигнале обратной связи и регулирует предел нарастания, основанный на выявленном уровне помех, можно вычислять новый предел нарастания. В других примерах после обнаружения помех в сигнале обратной связи и/или в управляющем сигнале клапанное управляющее устройство 102 может активировать контроль предела нарастания. Применение приведенного в примере способа 500 завершается, когда вычисленный предел (пределы) нарастания запоминается в памяти 214, встроенной в блок управления 108 (блок 514).
Приведенный в примере способ 600 из ФИГ.6 ограничивает изменение величины запуска, вычисленное алгоритмом или в процессе управления положением рабочего органа в блоке управления 108 из ФИГ.1. Приведенный в примере способ 600 представляет отдельное вычисление величины запуска и ее сравнение с пределом нарастания. Однако приведенный в примере способ 600 можно инициировать для каждого случая полученного управляющего сигнала и/или полученного сигнала обратной связи о перемещении клапана. Приведенный в примере способ 600 начинается тогда, когда сборка регулирующего клапана 100 из ФИГ.1 находится в рабочем состоянии, а клапанное управляющее устройство 102 принимает управляющий сигнал и сигнал обратной связи (блоки 602 и 604). Затем на основании разности между сигналом обратной связи и управляющим сигналом (блок 606) вычисляется величина запуска электропневматического преобразователя. Эта величина запуска электропневматического преобразователя равняется уровню, до которого клапанное управляющее устройство 102 должно открывать или закрывать привод, подсоединенный к клапану 104.
После вычисления величина запуска электропневматического преобразователя на основании разности между величиной запуска электропневматического преобразователя и его предыдущей величиной запуска вычисляется изменение величины запуска электропневматического преобразователя (блок 608). Предыдущая величина запуска электропневматического преобразователя - это величина запуска электропневматического преобразователя, которая передается в электропневматический преобразователь 112 до приема клапанным управляющим устройством 102 самого последнего управляющего сигнала и сигнала обратной связи. Предыдущая величина запуска электропневматического преобразователя также может быть изменена на основании предела нарастания. После этого изменение величины запуска электропневматического преобразователя сравнивается с пределом нарастания (блок 610). Предел нарастания может базироваться (например. как функция) на изменении величины запуска электропневматического преобразователя, среднем вычисленном токе при использовании величины запуска электропневматического преобразователя, величине запуска электропневматического преобразователя и/или на среднем значении вычисленного тока до добавления величины запуска электропневматического преобразователя. В качестве альтернативы, предел нарастания может быть величиной, соответствующей максимальному изменению величины запуска электропневматического преобразователя 112.
В тех случаях, когда изменение величины запуска электропневматического преобразователя положительно, а изменение в величине запуска электропневматического преобразователя меньше предела нарастания (блок 610), величина запуска электропневматического преобразователя не модифицируется, а блок управления 108 передает величину запуска электропневматического преобразователя в виде тока на электропневматический преобразователь 112 (блок 614). Кроме того, в случаях, когда изменение величины запуска электропневматического преобразователя отрицательно (например, уменьшение величины запуска электропневматического преобразователя), и ниже предела нарастания (блок 610), то величина запуска электропневматического преобразователя не модифицируется, и блок управления 108 передает величину запуска электропневматического преобразователя в виде тока на электропневматический преобразователь 112 (блок 614). Однако, если изменение величины запуска для электропневматического преобразователя положительно и превышает предел нарастания (блок 610), или же изменение величины запуска электропневматического преобразователя отрицательно и выше порога нарастания (блок 610), то величина запуска электропневматического преобразователя изменяется на основании предела нарастания (блок 612). В случаях положительного изменения величины запуска электропневматического преобразователя величина запуска электропневматического преобразователя уменьшается до предыдущего значения плюс предел нарастания или снижается до значения, меньше предыдущего значения величины запуска электропневматического преобразователя, плюс предел нарастания. Аналогично в случаях отрицательного изменения величины запуска электропневматического преобразователя величина запуска электропневматического преобразователя возрастает до своего предыдущего значения минус предел нарастания или снижается до значения меньше своего предыдущего значения минус предел нарастания. Применение приведенного в примере способа завершается, когда измененная величина запуска электропневматического преобразователя подается в виде тока на электропневматический преобразователь 112 (блок 614).
Приведенный в примере способ 700 из ФИГ. 7 ограничивает изменение величины запуска в результате помех сигнала обратной связи и/или управляющего сигнала. Приведенный в примере способ 700 представляет отдельное вычисление величины запуска и ее сравнение с пределом нарастания. Однако приведенный в примере способ 700 можно применить для каждого случая полученного управляющего сигнала и/или полученного сигнала обратной связи о перемещении клапана. В других реализациях приведенный в примере способ 700 может установить предел нарастания, основанный на обнаруженных помехах клапанного управляющего устройства 102 и/или на уровне внешних помех окружающей среды, воздействующих на разъем 106. Приведенный в примере способ 700 начинается, когда сборка регулирующего клапана 100 из ФИГ. 1 находится в рабочем состоянии, а клапанное управляющее устройство 102 принимает управляющий сигнал и сигнал обратной связи (блоки 702 и 704). Затем сигнал обратной связи и/или управляющий сигнал проверяются на присутствие в них помех (блок 706). Проверка на присутствие помех в сигналах может включать выявление превышения амплитудой или средним значением помех их порогового значения. В некоторых примерах проверка на присутствие помех может выполняться после фильтрации управляющего сигнала и/или сигнала обратной связи в клапанном управляющем устройстве 102 и/или в блоке управления 108. В других примерах проверку на присутствие помех можно проводить до любой фильтрации.
После этого на основании измеренного уровня помех (блок 708) устанавливают предел нарастания. Соотношение предела нарастания с уровнем помех может быть определено с помощью приведенного в примере способа 500 из ФИГ.5. В тех случаях, когда помехи не превышают пороговое значение, предел нарастания может основываться только на изменении величины запуска электропневматического преобразователя и/или на среднем значении тока, вычисленного при величине запуска электропневматического преобразователя. В качестве альтернативы предел нарастания может соответствовать максимальному изменению тока в электропневматическом преобразователе 112. В тех случаях, когда уровень помех превышает пороговое значение, предел нарастания помех может базироваться на уровне помех, на изменении величины запуска электропневматического преобразователя и/или на среднем значении вычисленного тока. После этого на основании разности между сигналом обратной связи и управляющим сигналом вычисляется величина запуска электропневматического преобразователя (блок 710). После вычисления величины запуска электропневматического преобразователя на основании разности между величиной запуска электропневматического преобразователя и предыдущей величиной запуска электропневматического преобразователя вычисляется изменение величины запуска электропневматического преобразователя (блок 712).
Приведенный в примере способ 700 из ФИГ.7 продолжает применяться, когда изменение величины запуска электропневматического преобразователя сравнивается с пределом нарастания помех (блок 714). В случаях, когда изменение величины запуска электропневматического преобразователя положительно и меньше предела нарастания помех, величина запуска электропневматического преобразователя не модифицируется, а блок управления 108 передает величину запуска электропневматического преобразователя в виде тока, поступающего на электропневматический преобразователь 112 (блок 718). Помимо этого, в тех случаях, когда изменение величины запуска электропневматического преобразователя отрицательно (например, уменьшение величины запуска электропневматического преобразователя) и ниже предела нарастания помех (блок 714), величина запуска электропневматического преобразователя не модифицируется, а блок управления 108 передает величину запуска электропневматического преобразователя в виде тока, поступающего на электропневматический преобразователь 112.
Однако если изменение величины запуска электропневматического преобразователя положительно и превышает предел нарастания помех, или же изменение величины запуска электропневматического преобразователя отрицательно и выше предела нарастания помех (блок 714), то величина запуска электропневматического преобразователя изменяется на основании предела нарастания помех (блок 716). В случаях положительного изменения величины запуска электропневматического преобразователя величина запуска электропневматического преобразователя уменьшается до предыдущего значения плюс предел нарастания помех или снижается до значения, меньшего предыдущего значения величины запуска электропневматического преобразователя, плюс предел нарастания помех. Аналогично в случаях отрицательного изменения величины запуска электропневматического преобразователя величина такого запуска возрастает до своего предыдущего значения минус предел нарастания помех или возрастает до значения, большего своего предыдущего значения, минус предел нарастания. Приведенный в примере способ завершается, когда измененная величина запуска электропневматического преобразователя передается в виде тока на электропневматический преобразователь 112 (блок 718).
На ФИГ. 8 показана блок-схема приведенной в примере процессорной системы 810, которую можно использовать для реализации приведенных в примере способов и устройства, описанных здесь. Например, процессорные системы, подобные или идентичные приведенной в примере процессорной системе 810, можно использовать для реализации приведенных в примере цифрового клапанного управляющего устройства 104, печатной платы 108, ограничителя нарастания тока запуска электропневматического преобразователя 110, детектора помех 206, процессора управления сервомеханизмом 208 и/или микропроцессора 210 из ФИГ.1 и/или 2. Хотя приведенная в примере процессорная система 810 описывается ниже как содержащая множество периферийных устройств, интерфейсов, чипов, элементов памяти и так далее, один или несколько из этих элементов могут быть устранены из других приведенных в примере процессорных систем, используемых для реализации одного или нескольких устройств типа цифрового клапанного управляющего устройства 104, печатной платы 108, ограничителя нарастания тока запуска электропневматического преобразователя 110, детектора помех 206, процессора управления сервомеханизмом 208 и/или микропроцессора 210.
Как показано на ФИГ. 8, процессорная система 810 содержит процессор 812, который подключен к соединительной шине 814. Процессор 812 содержит набор регистров или регистровое пространство 816, отображенное на ФИГ.8 как набор, полностью встроенный в ИС, однако этот набор в качестве альтернативы может располагаться полностью или частично вне ИС или непосредственно подсоединяться к процессору 812 с помощью специализированных электрических соединений и/или с помощью соединительной шины 814. Процессор 812 может быть любым подходящим процессором, обрабатывающим блоком или микропроцессором. Хотя и непоказанная на ФИГ. 8, система 810 может быть мультипроцессорной системой и, таким образом, содержать один или несколько процессоров, которые идентичны и подобны процессору 812 и через канал связи подключены к соединительной шине 814.
Процессор 812 из ФИГ. 8 подсоединяется к набору чипов 818, который содержит контроллер памяти 820 и контроллер периферийных входных/выходных устройств (I/O) 822. Широко известно, что набор чипов обычно обеспечивает функции управления памятью и устройствами ввода/вывода, а также множеством регистров общего и/или специального назначения, таймерами и т.д., которые доступны или используются одним или несколькими процессорами, подсоединенными к набору чипов 818. Контроллер памяти 820 выполняет функции, которые позволяют процессору 812 (или процессорам в случае мультипроцессорной системы) обращаться к системной памяти 824 и к внешней памяти большей емкости 825.
Системная память 824 может содержать любой нужный тип энергозависимой и/или энергонезависимой памяти, такой как, например, статическая память с произвольным доступом (SRAM), динамическая память с произвольным доступом (DRAM), флэш-память, постоянная память (ROM) и т.д. Внешняя память большей емкости 825 может включать любой требуемый тип устройства внешней памяти большой емкости. Например, если приведенная в примере процессорная система 810 используется для реализации цифрового клапанного управляющего устройства 104 (ФИГ.1), то в состав внешней памяти большей емкости 825 могут входить накопитель на жестком диске, накопитель на оптическом диске, накопитель на магнитной ленте и т.д. Как альтернатива, если приведенная в примере процессорная система 810 используется для реализации печатной платы 108, ограничителя нарастания тока запуска электропневматического преобразователя 110, детектора помех 206, процессора управления сервомеханизмом 208 и/или микропроцессора 210, то внешняя память большей емкости 825 может содержать твердотельное запоминающее устройство (например, флэш-память, ОЗУ и т.д.), магнитное ЗУ (например, накопитель на жестком диске) или любое другое ЗУ, пригодное для организации внешней памяти большой емкости на печатной плате 108, в ограничителе нарастания тока запуска электропневматического преобразователя 110, детекторе помех 206, процессоре управления сервомеханизмом 208 и/или в микропроцессоре 210.
Контроллер периферийных устройств 822 выполняет функции, которые позволяют процессору 812 связываться с периферийными устройствами ввода/вывода (I/O) 826 и 828 и с сетевым интерфейсом 830 через шину периферийных устройств ввода/вывода 832. Устройства ввода/вывода 826 и 828 могут принадлежать к любому необходимому типу устройств ввода/вывода, как, например, клавиатура, дисплей (например, жидкокристаллический дисплей (LCD), дисплей на электронно-лучевой трубке (CRT) и так далее), устройство управления курсором (например, мышь, шаровой манипулятор, емкостный сенсорный планшет, джойстик и т.д.) и т.д. Сетевой интерфейс 830 может быть, например, устройством Ethernet, устройством, работающим в режиме асинхронной передачи (ATM), устройством 802.11, модемом цифровой абонентской линии, кабельным модемом, модемом сотовой связи и так далее, которые позволяют процессорной системе 810 связываться с другой процессорной системой.
Хотя контроллер памяти 820 и контроллер устройств ввода/вывода 822 показаны на ФИГ. 8 в виде отдельных функциональных блоков внутри набора чипов 818, функции, выполняемые этими блоками, могут быть объединены в отдельной полупроводниковой схеме или реализованы с помощью двух или нескольких отдельных интегральных схем.
По меньшей мере, некоторые из вышеописанных и приведенных в примерах способов и/или систем реализованы с помощью одного или нескольких наборов программного и/или программно-аппаратного обеспечения, выполняемого процессором компьютера. Однако реализации специализированного программного обеспечения, включая, но, не ограничиваясь, специальными прикладными интегральными схемами, устройствами программируемой логики и другими устройства аппаратного обеспечения, могут быть скомпонованы аналогичным образом либо целиком, либо частично для применения некоторых или всех приведенных в примере способов и/или устройства, описанных в данной работе. Кроме того, альтернативные программные реализации, включая, но, не ограничиваясь, распределенной обработкой или распределенной обработкой компонентов/объектов, параллельной обработкой или виртуальной машинной обработкой, могут быть также скомпонованы для применения приведенных в примере способов и/или систем, описанных в данной работе.
Также следует отметить, что приведенные в примере программные и/или программно-аппаратные реализации, описанные в данной работе, хранятся на материальных носителях памяти, таких как магнитный носитель (например, магнитный диск или магнитная лента); магнитно-оптический или оптический носитель, такой как оптический диск; на твердотельном носителе, таком как плата памяти или другой комплект, в котором размещается одно или несколько (энергонезависимых) ПЗУ, ЗУ с произвольной выборкой, или на других перезаписываемых (энергозависимых) ПЗУ. Соответственно приведенное в примере программное и/или программно-аппаратное обеспечение, описанное в данной работе, может храниться на материальном носителе памяти, таком как описан выше, или являться альтернативным носителем. До той степени, с которой в вышеуказанной спецификации описываются приведенные в примере компоненты и функции со ссылкой на конкретные стандарты и протоколы, становится понятным, что объем данного патента не ограничивается такими стандартами и протоколами. Например, каждый из стандартов Интернет и других средств передачи данных в сети с коммутацией пакетов (например, Протокол Управления Передачей (ТСР)/Протокол Интернет (IP), Протокол Передачи Дейтаграмм Пользователя (UDP)/IP, Язык Разметки Гипертекста (HTML), Протокол Передачи Гипертекста (HTTP)) представляют собой примеры текущего положения дел в предметной области. Такие стандарты периодически меняются на более быстрые и более эффективные эквиваленты, обладающие такими же общими функциональными возможностями. Соответственно идущие на замену стандарты и протоколы с такими же функциями являются эквивалентами, которые рассматриваются в этом патенте и предназначены для включения в область сопроводительной патентной формулы.
Кроме того, хотя в этом патенте и раскрываются приведенные в примере способы и устройство, включая программное или программно-аппаратное обеспечение, выполняемое на аппаратном обеспечении, следует отметить, что такие системы носят лишь иллюстративный характер и не должны рассматриваться как ограничительные. Например, предполагается, что любой или все из этих компонентов аппаратного и программного обеспечения могут быть воплощены исключительно в аппаратном обеспечении, исключительно в программном обеспечении, исключительно в программно-аппаратном обеспечении или в некоторых комбинациях аппаратного, программно-аппаратного и/или программного обеспечения. Соответственно, в то время как в вышеприведенной спецификации описаны приведенные в качестве примера способы, системы и машинно-доступная среда, примеры не являются единственным способом реализации таких систем, способов и машинно-доступной среды. Следовательно, несмотря на то, что определенные приведенные в примерах способы, системы и машинно-доступная среда описаны в данной работе, область покрытия этого патента этим не ограничивается. Напротив, этот патент покрывает все способы, системы и машинно-доступную среду, которые однозначно попадают в рамки прилагаемой патентной формулы либо буквально, либо согласно теории эквивалентов.

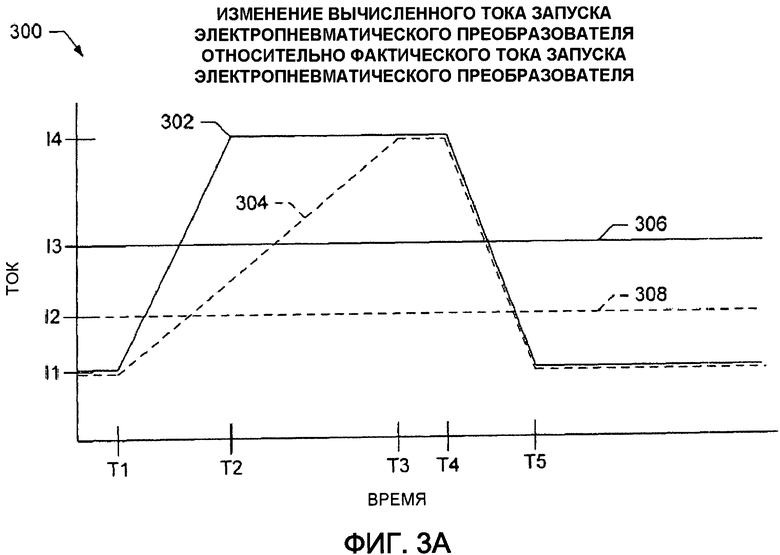

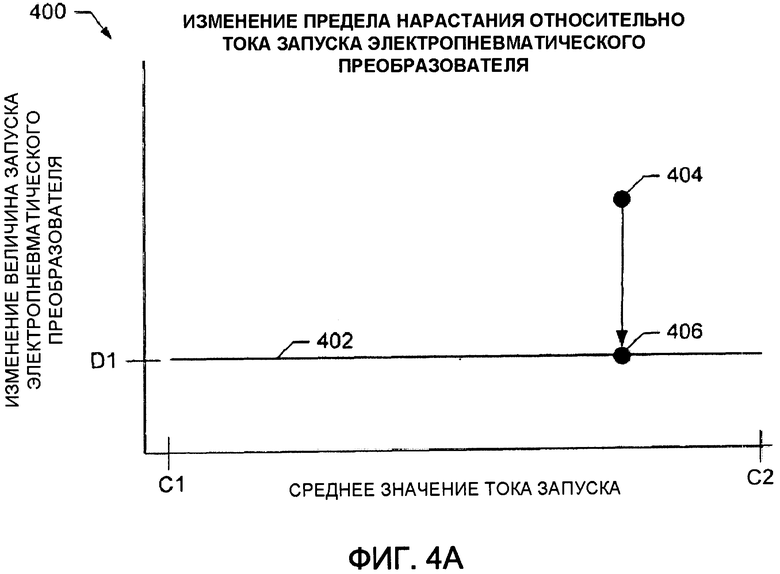
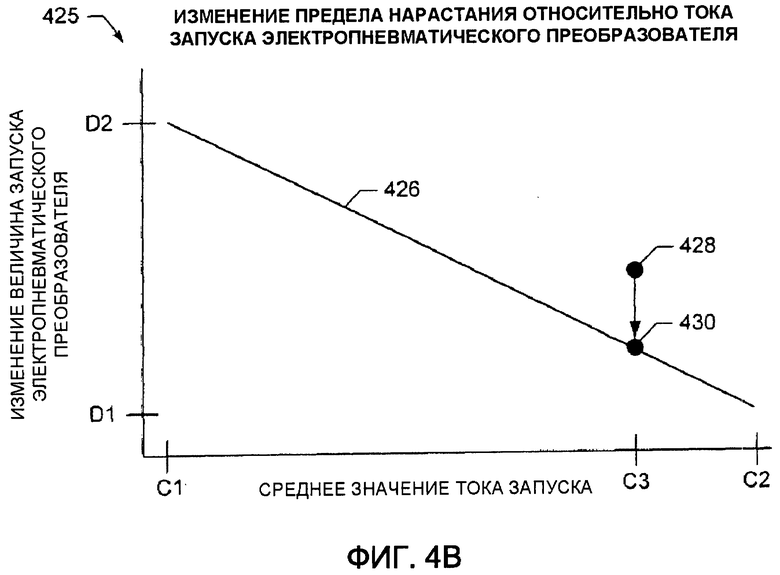
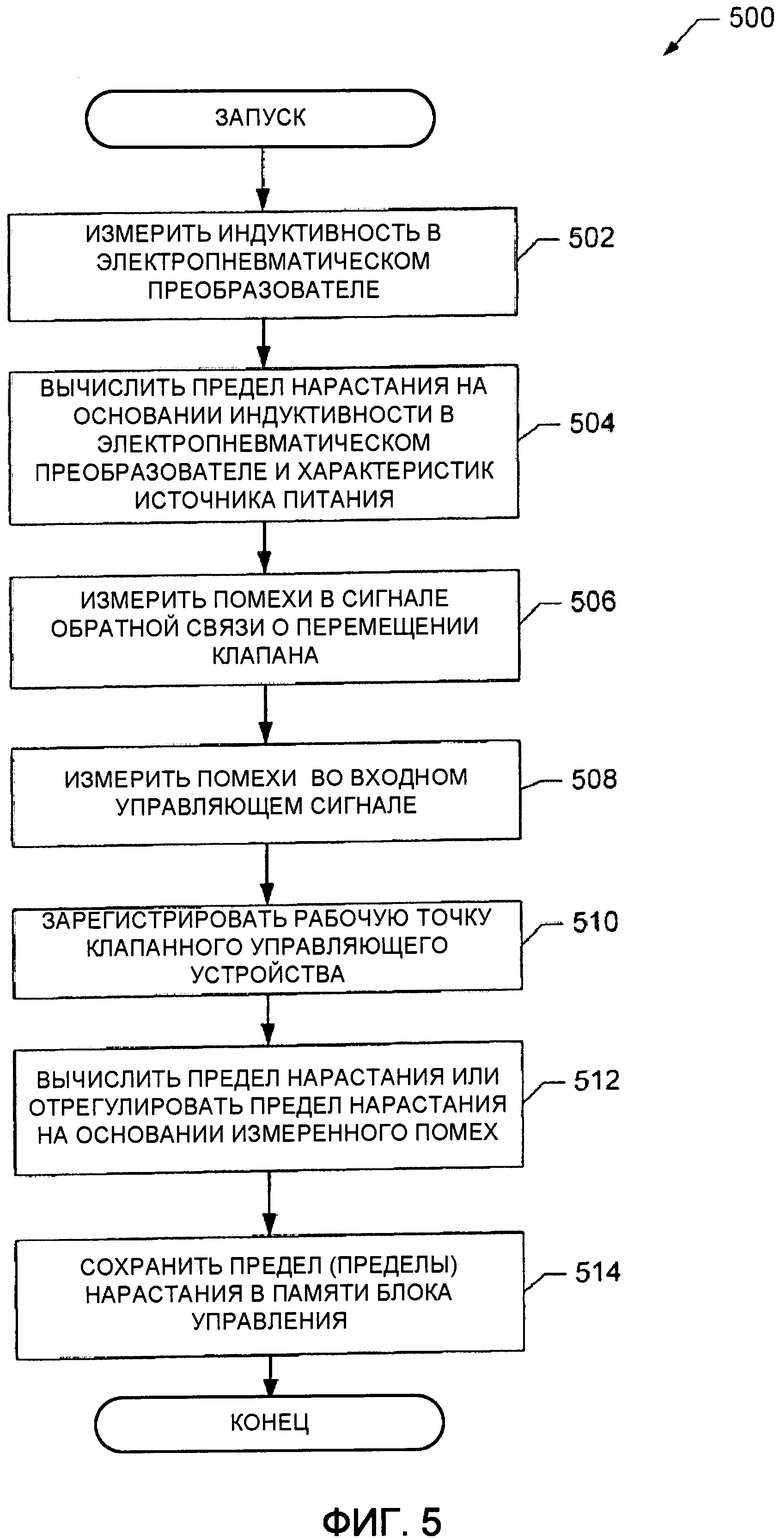
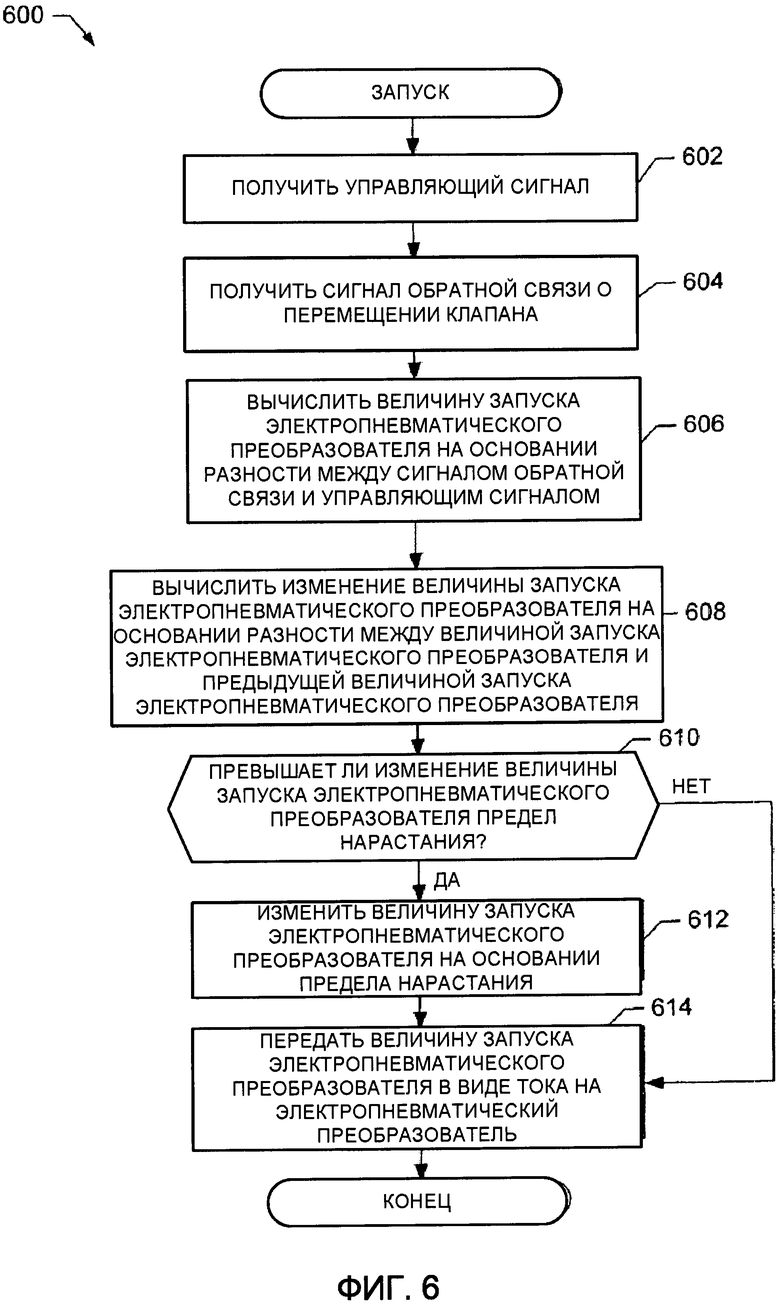
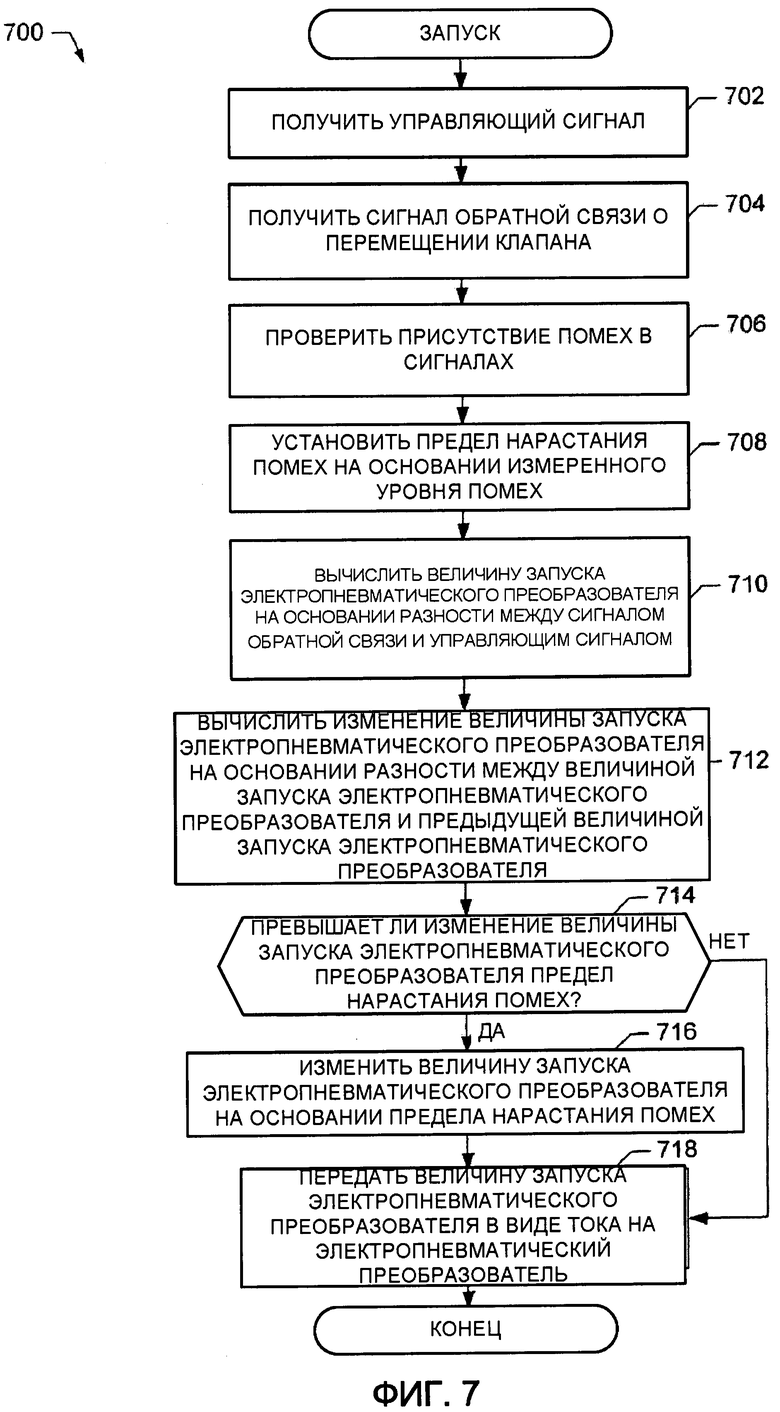

Изобретение относится к регуляторам, в частности к способу и устройству для ограничения изменения величины запуска электропневматического регулятора. Технический результат - ограничение изменения величины запуска в электропневматическом регуляторе. Приведенный в примере и раскрытый способ включает получение управляющего сигнала и сигнала обратной связи, вычисление величины запуска на основании управляющего сигнала и сигнала обратной связи, вычисление предела нарастания, определение превышения предела нарастания разностью между величиной запуска и предыдущей величиной запуска электропневматического регулятора и изменение вычисленной величины запуска на основании вычисленного предела нарастания. 3 н. и 22 з.п. ф-лы, 10 ил.
1. Способ ограничения изменения величины запуска в электропневматическом регуляторе, включающий:
получение управляющего сигнала и сигнала обратной связи;
вычисление величины запуска на основании управляющего сигнала и сигнала обратной связи;
вычисление предела нарастания, по меньшей мере, частично на основании, по меньшей мере, одного из следующего: величина запуска, предыдущая величина запуска, разность между величиной запуска и предыдущей величиной запуска, управляющий сигнал, сигнал обратной связи, средняя вычисленная величина запуска, средняя фактическая величина запуска, обнаруженные помехи, по меньшей мере, в одном из: управляющий сигнал и сигнал обратной связи;
определение является ли разность между величиной запуска и предыдущей величиной запуска большей, чем вычисленный предел нарастания электропневматического регулятора; и
изменение вычисленной величины запуска, основанной на вычисленном пределе нарастания.
2. Способ по п. 1, отличающийся тем, что дополнительно включает подачу измененной величины запуска на измерительный преобразователь электропневматического регулятора.
3. Способ по п. 1, отличающийся тем, что процесс определения превышения вычисленного предела нарастания разностью между величиной запуска и предыдущей величиной запуска состоит из:
вычисления разности между величиной запуска и предыдущей величиной запуска; и сравнения разности с вычисленным пределом нарастания.
4. Способ по п. 1, отличающийся тем, что вычисление предела нарастания основывается, по меньшей мере, на одном из следующего: на квадратичном соотношении, линейном соотношении, экспоненциальном соотношении, логарифмическом соотношении или на пошаговом соотношении, по меньшей мере, с одним из таких параметров, как величина запуска, предыдущая величина запуска, управляющий сигнал, сигнал обратной связи, средняя вычисленная величина запуска или средняя фактическая величина запуска.
5. Способ по п. 1, отличающийся тем, что вычисленный предел нарастания является изменением предопределенной максимальной величины запуска в течение цикла процесса управления сервомеханизмом.
6. Способ по п. 1, отличающийся тем, что управляющий сигнал содержит инструкцию установки электропневматического привода в заданное положение, при этом сигнал обратной связи соответствует положению электропневматического привода.
7. Способ по п. 1, отличающийся тем, что предыдущей величиной запуска является ранее вычисленная величина запуска, которая была передана до получения, по меньшей мере, одного сигнала обратной связи или управляющего сигнала.
8. Способ по п. 1 отличающийся тем, что дополнительно включает:
идентификацию помех, по меньшей мере, в одном из сигналов - в управляющем сигнале или в сигнале обратной связи;
установку предела нарастания уровня помех на основе идентифицированного значения помех;
определение является ли разность между величиной запуска и предыдущей величиной запуска большей, чем предел нарастания уровня помех; и
изменение вычисленной величины запуска на основании предела нарастания уровня помех.
9. Способ по п. 8, отличающийся тем, что идентификация помех включает определение превышения порогового значения помех, по меньшей мере, одним из параметров - амплитудой или средним значением уровня помех.
10. Устройство для ограничения изменения величины запуска электропневматического регулятора, включающее ограничитель нарастания тока запуска, выполненный с возможностью:
получения величины запуска и предыдущей величины запуска;
вычисления предела нарастания, по меньшей мере, частично на основании, по меньшей мере, одного из следующего: величина запуска, предыдущая величина запуска, разность между величиной запуска и предыдущей величиной запуска, управляющий сигнал, сигнал обратной связи, средняя вычисленная величина запуска, средняя фактическая величина запуска, обнаруженные помехи, по меньшей мере, в одном из: управляющий сигнал и сигнал обратной связи;
определения превышения вычисленного предела нарастания электропневматического регулятора разностью между величиной запуска и предыдущей величиной запуска; и
изменения вычисленной величины запуска, основанной на вычисленном пределе нарастания.
11. Устройство по п. 10, отличающееся тем, что дополнительно включает процессор управления положением рабочего органа для:
получения управляющего сигнала и сигнала обратной связи;
вычисления величины запуска на основании управляющего сигнала и сигнала обратной связи и передачи величины запуска на ограничитель нарастания тока запуска; и
подачи измененной величины запуска на измерительный преобразователь электропневматического регулятора.
12. Устройство по п. 11, отличающееся тем, что дополнительно включает детектор помех, предназначенный для идентификации помех, по меньшей мере, в одном из сигналов - управляющем сигнале или сигнале обратной связи - посредством определения превышения, по меньшей мере, одним из параметров - амплитудой или средним значением уровня помех - порогового значения помех.
13. Устройство по п. 12, отличающееся тем, что ограничитель нарастания тока запуска должен:
установить предел нарастания уровня помех, основанный на идентифицированном уровне помех;
определить является ли разность между величиной запуска и предыдущей величиной запуска большей, чем предел нарастания уровня помех; и
изменить вычисленную величину запуска на основании предела нарастания помех.
14. Устройство по п. 11, отличающееся тем, что дополнительно включает:
генератор тока запуска для получения измененной величины запуска из процессора управления положением рабочего органа и генерирования сигнала, включающего измененную величину запуска, которая передается в измерительный преобразователь; и
память для хранения, по меньшей мере, одной предыдущей величины запуска, величины запуска или вычисленного предела нарастания для ограничителя нарастания тока запуска.
15. Устройство по п. 14, отличающееся тем, что память хранит вычисленный предел нарастания в виде изменения предопределенной максимальной величины запуска в течение цикла процесса управления сервомеханизмом.
16. Устройство по п. 14, отличающееся тем, что ограничитель нарастания тока запуска хранит предыдущий сигнал запуска в памяти как ранее вычисленный сигнал запуска, который был передан до получения, по меньшей мере, одного из сигналов - сигнала обратной связи или управляющего сигнала.
17. Устройство по п. 10, отличающееся тем, что ограничитель нарастания тока запуска определяет превышение вычисленного предела нарастания разностью между величиной запуска и предыдущей величиной запуска посредством:
вычисления разности между величиной запуска и предыдущей величиной запуска; и сравнения разности с вычисленным пределом нарастания.
18. Устройство по п. 10, отличающееся тем, что ограничитель нарастания тока запуска должен вычислять предел нарастания на основании, по меньшей мере, одного из следующего: квадратичного соотношения, линейного соотношения, экспоненциального соотношения, логарифмического соотношения или пошагового соотношения, по меньшей мере, с одним из таких параметров, как величина запуска, предыдущая величина запуска, управляющий сигнал, сигнал обратной связи, средняя вычисленная величина запуска или средняя фактическая величина запуска.
19. Устройство по п. 10, отличающееся тем, что сигнал обратной связи соответствует положению электропневматического привода, и при этом управляющий сигнал содержит инструкцию установки клапанного управляющего устройства в заданное положение.
20. Машинно-доступный носитель с хранимыми в нем инструкциями, которые после своего исполнения, активируют машину на:
получение управляющего сигнала и сигнала обратной связи;
вычисление величины запуска на основании управляющего сигнала и сигнала обратной связи;
вычисление предела нарастания, по меньшей мере, частично на основании, по меньшей мере, одного из следующего: величина запуска, предыдущая величина запуска, разность между величиной запуска и предыдущей величиной запуска, управляющий сигнал, сигнал обратной связи, средняя вычисленная величина запуска, средняя фактическая величина запуска, обнаруженные помехи, по меньшей мере, в одном из: управляющий сигнал и сигнал обратной связи;
определение является ли разность между величиной запуска и предыдущей величиной запуска большей, чем вычисленный предел нарастания электропневматического регулятора; и
изменение вычисленной величины запуска на основании вычисленного предела нарастания.
21. Машинно-доступный носитель по п. 20, отличающийся тем, что машинно-доступные инструкции после своего выполнения активируют машину на передачу измененной величины запуска в измерительный преобразователь электропневматического регулятора.
22. Машинно-доступный носитель по п. 20, отличающийся тем, что машинно-доступные инструкции после своего выполнения активируют машину на определение превышения вычисленного предела нарастания разностью между величиной запуска и предыдущей величиной запуска посредством:
вычисления разности между величиной запуска и предыдущей величиной запуска; и сравнения разности с вычисленным пределом нарастания.
23. Машинно-доступный носитель по п. 20, отличающийся тем, что машинно-доступные инструкции после своего выполнения активируют машину на вычисление предела нарастания, основываясь, по меньшей мере, на одном из следующего: на квадратичном соотношении, линейном соотношении, экспоненциальном соотношении, логарифмическом соотношении или на пошаговом соотношении, по меньшей мере, с одним из таких параметров, как величина запуска, предыдущая величина запуска, управляющий сигнал, сигнал обратной связи, средняя вычисленная величина запуска или средняя фактическая величина запуска.
24. Машинно-доступный носитель по п. 20, отличающийся тем, что предыдущей величиной запуска является ранее вычисленная величина запуска, которая была передана до получения, по меньшей мере, одного из следующих сигналов - сигнала обратной связи или управляющего сигнала.
25. Машинно-доступный носитель по п. 20, отличающийся тем, что машинно-доступные инструкции после своего выполнения активируют машину на:
идентификацию помех, по меньшей мере, в одном из сигналов - в управляющем сигнале или в сигнале обратной связи;
установку предела нарастания уровня помех на основе идентифицированного уровня помех;
определение является ли разность между величиной запуска и предыдущей величиной запуска большей, чем предел нарастания помех; и
изменение вычисленной величины запуска на основании предела нарастания уровня помех.
| US 6267349 B1, 31.07.2001 | |||
| Устройство для управления приводом запорного органа | 1982 |
|
SU1078487A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Устройство для формирования топа к табакорезальным станкам | 1979 |
|
SU867362A1 |

