ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству преобразования мощности, выполненному с возможностью управления электродвигателем.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Устройства преобразования мощности, выполненные с возможностью управления, например, электродвигателями компрессоров, широко известны.
Например, в Патентном документе 1 описано устройство преобразования мощности, выполненное с возможностью изменения выходного крутящего момента электродвигателя в зависимости от пульсации крутящего момента нагрузки компрессора в соответствии с его вращением. То есть в соответствии, например, с фиг. 18 в одноцилиндровом компрессоре крутящий момент сжатия изменяется в зависимости от угла поворота поршня в соответствии с его вращением, и, следовательно, крутящий момент нагрузки электродвигателя пульсирует в соответствии с изменением крутящего момента сжатия. Таким образом, в устройстве преобразования мощности, описанном в Патентном документе 1, выходной крутящий момент электродвигателя изменяется синхронно с пульсацией крутящего момента нагрузки. Посредством этого снижается вибрация во время работы компрессора.
В Патентном документе 2 описано устройство преобразования мощности, в котором емкость конденсатора, выполненного с возможностью сглаживания выходного напряжения, крайне мала. В частности, устройство преобразования мощности включает в себя схему преобразователя, звено постоянного тока, подключенное параллельно схеме преобразователя, и схему инвертора, содержащую множество переключающих устройств. В схеме преобразователя выполняется двухполупериодное выпрямление напряжения питания переменного тока для выдачи выпрямленного напряжения в звено постоянного тока. К звену постоянного тока подключен конденсатор, имеющий крайне малую электростатическую емкость. В частности, такой конденсатор имеет емкость лишь около одной сотой от емкости типичного сглаживающего конденсатора. Таким образом, звено постоянного тока выдает в качестве напряжения постоянного тока выпрямленное напряжение, которое пульсирует без сглаживания. Схема инвертора преобразует такое напряжение постоянного тока в мощность переменного тока и подает такую мощность в электродвигатель для приведения электродвигателя в действие. В устройстве преобразования мощности, описанном в Патентном документе 2, конденсатор, имеющий малую емкость, как описано выше, сокращает размеры устройства преобразования мощности и расходы на устройство преобразования мощности.
Кроме того, в Патентном документе 3 описано, что вышеупомянутое управление крутящим моментом выполняется для устройства преобразования мощности с конденсатором, имеющим малую емкость, как описано в Патентном документе 2. То есть, если конденсатор, подключенный к звену постоянного тока, имеет малую электростатическую емкость, напряжение, выдаваемое в схему инвертора, содержит пульсирующую составляющую. То есть в Патентном документе 3 выходной крутящий момент изменяется в зависимости от крутящего момента нагрузки электродвигателя и пульсирующей составляющей выходного напряжения источника питания. Таким образом, снижается вибрация компрессора.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЙ ДОКУМЕНТ 1: Публикация патента Японии № 2005-046000
ПАТЕНТНЫЙ ДОКУМЕНТ 2: Публикация патента Японии № 2002-051589
ПАТЕНТНЫЙ ДОКУМЕНТ 3: Патент Японии № 4192979
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
При управлении крутящим моментом, описанном в Патентном документе 3, значение тока электродвигателя повышается с увеличением выходного крутящего момента в момент времени, когда пиковое значение пульсирующей составляющей крутящего момента нагрузки электродвигателя и пиковое значение пульсирующей составляющей напряжения звена постоянного тока, синхронизированного с напряжением питания, совпадают друг с другом. В результате этого в связи с увеличением величины тока электродвигателя возникает отказ переключающего устройства и размагничивание магнита электродвигателя. Например, в Патентном документе 3 в качестве мер по предотвращению вышеупомянутых нарушений работоспособности описано управление, с помощью которого обнаруживается значение тока электродвигателя и снижается выходной крутящий момент в тех случаях, когда такое значение тока превышает заданный верхний предел.
Однако ввиду того, что пульсирующая составляющая напряжения звена постоянного тока и пульсирующая составляющая крутящего момента нагрузки пульсируют с различными частотами, моменты времени пиковых значений обеих составляющих не всегда совпадают друг с другом. В связи с этим даже в случае, если ток электродвигателя обнаруживается в момент времени, в который пиковые значения смещены относительно друг друга, формируется относительно низкая величина тока, и, следовательно, требуемый пиковый ток не может быть обнаружен. В результате диапазон изменения выходного крутящего момента электродвигателя не может быть точно ограничен, поэтому могут произойти вышеупомянутые нарушения работоспособности.
Настоящее изобретение было сделано с учетом вышеизложенного, и задачей настоящего изобретения является создание устройства преобразования мощности, способного обеспечивать обнаружение увеличения тока электродвигателя во время управления крутящим моментом.
Первый аспект изобретения относится к устройству преобразования мощности, включающему в себя секцию (20) преобразования, содержащую множество переключающих устройств (Sr, Ss, St, Su, Sv, Sw, Sx, Sy, Sz) и выполненную с возможностью преобразования, путем переключения переключающих устройств (Sr, Ss, St, Su, Sv, Sw, Sx, Sy, Sz), мощности от источника (6) питания переменного тока в мощность переменного тока, имеющую заданную частоту, для выдачи мощности переменного тока в электродвигатель (5); и контроллер (40), выполненный с возможностью выполнения управления крутящим моментом таким образом, что выходной крутящий момент электродвигателя (5) содержит пульсирующую составляющую источника питания, которая представляет собой пульсирующую составляющую с частотой, кратной в целое число раз частоте выходного напряжения источника (6) питания переменного тока, и что выходной крутящий момент электродвигателя (5) изменяется в соответствии с изменением крутящего момента нагрузки электродвигателя (5), и выполненный с возможностью нахождения пикового значения тока, когда момент времени пикового значения пульсирующей составляющей источника питания и момент времени пикового значения пульсирующей составляющей крутящего момента нагрузки совпадают или практически совпадают друг с другом, и уменьшения диапазона изменения выходного крутящего момента таким образом, что пиковое значение тока не превышает заданного верхнего предела.
Необходимо отметить, что выходное напряжение описанного в данном документе источника (6) питания переменного тока также означает, например, выходное напряжение (т.е. выходное напряжение, содержащее пульсирующую составляющую, синхронизированную с источником (6) питания переменного тока) звена постоянного тока в том случае, когда устройство преобразования мощности включает в себя звено постоянного тока.
В первом аспекте изобретения контроллер (40) заставляет пульсировать выходной крутящий момент электродвигателя (5) таким образом, что выходной крутящий момент электродвигателя (5) содержит пульсирующую составляющую выходного напряжения источника (6) питания переменного тока. Кроме того, контроллер (40) выполняет управление крутящим моментом, с помощью которого выходной крутящий момент электродвигателя (5) изменяется в зависимости от изменения крутящего момента нагрузки электродвигателя (5).
Второй аспект изобретения относится к устройству преобразования мощности первого аспекта изобретения, в котором контроллер (40) содержит блок (55) удержания пикового значения, выполненный с возможностью удержания пикового значния тока в течение заданного периода определения, и регулятор (54) величины управления крутящим моментом, выполненный с возможностью уменьшения диапазона изменения выходного крутящего момента электродвигателя (5), когда величина пикового тока, удерживаемая блоком (55) удержания пикового значения, превышает заданный верхний предел.
При управлении крутящим моментом ввиду того, что блок (55) удержания пикового значения удерживает максимальное значение тока электродвигателя (5) в качестве пикового тока, может быть обеспечено нахождение пикового тока электродвигателя (5). Данный вопрос подробно рассматривается ниже.
Как описано выше, ток электродвигателя (5) является наибольшим, когда момент времени пикового значения крутящего момента нагрузки электродвигателя (5) и момент времени пикового значения выходного напряжения источника (6) питания переменного тока совпадают друг с другом. Однако цикл пульсации крутящего момента нагрузки электродвигателя (5) и цикл пульсации выходного напряжения источника (6) питания переменного тока не всегда являются одинаковыми. При этом даже если ток электродвигателя (5) обнаруживается в момент времени, в который пиковые значения не совпадают друг с другом, такое значение тока является относительно небольшим. То есть до тех пор, пока ток электродвигателя (5) обнаруживается в момент времени, в который пиковые значения совпадают друг с другом, не может быть обеспечено нахождение пикового тока электродвигателя (5), создаваемого при управлении крутящим моментом.
По вышеуказанной причине в настоящем изобретении блок (55) удержания пикового значения удерживает пиковое значение тока электродвигателя (5) в течение каждого заданного периода определения. Так, пиковый ток может быть найден в момент времени, в который пиковое значение крутящего момента нагрузки электродвигателя (5) и пиковое значение выходного напряжения источника питания практически совпадают друг с другом. Когда пиковый ток, найденный, как описано выше, превышает заданный верхний предел, регулятор (54) величины управления крутящим моментом выполняет управление для уменьшения диапазона изменения выходного крутящего момента электродвигателя (5).
Третий аспект изобретения относится к устройству преобразования мощности второго аспекта изобретения, в котором контроллер (40) дополнительно содержит регулятор (72) опорной скорости, выполненный с возможностью регулирования рабочей частоты (fc) электродвигателя (5) таким образом, что момент времени пикового значения пульсирующей составляющей крутящего момента нагрузки и момент времени пикового значения пульсирующей составляющей источника питания совпадают или практически совпадают друг с другом во время периода определения блока (55) удержания пикового значения.
В третьем аспекте изобретения регулятор (72) опорной скорости обеспечивает в период определения для удержания пикового значения совпадение или практически совпадение друг с другом момента времени пикового значения крутящего момента нагрузки электродвигателя и момента времени пикового значения выходного напряжения звена (15) постоянного тока. В результате можно обеспечить, чтобы пиковый ток электродвигателя (5) был найден в период определения.
Четвертый аспект изобретения относится к устройству преобразования мощности второго или третьего аспекта изобретения, в котором контроллер (40) дополнительно содержит блок (71) нахождения цикла, выполненный с возможностью нахождения, на основе частоты выходного напряжения источника (6) питания переменного тока и рабочей частоты электродвигателя (5), цикла с моментом времени, в который пиковое значение крутящего момента нагрузки электродвигателя (5) и пиковое значение выходного напряжения источника (6) питания переменного тока совпадают или практически совпадают друг с другом, и регулятор (72) опорной скорости, регулирующий рабочую частоту электродвигателя (5) таким образом, что цикл, найденный блоком (71) нахождения цикла, равен или меньше периода определения блока (55) удержания пикового значения.
В четвертом аспекте изобретения блок (71) нахождения цикла находит на основе частоты выходного напряжения источника (6) питания переменного тока и рабочей частоты электродвигателя (5), цикл, в котором момент времени пикового значения выходного напряжения источника (6) питания переменного тока и момент времени пикового значения крутящего момента нагрузки электродвигателя (5) совпадают или практически совпадают друг с другом. Регулятор (72) опорной скорости регулирует рабочую частоту электродвигателя (5) таким образом, что цикл, найденный, как описано выше, равен или меньше периода определения блока (55) удержания пикового значения. В результате в период определения пиковое значение тока может быть найдено в состоянии, в котором момент времени пикового значения выходного напряжения источника (6) питания переменного тока и момент времени пикового значения крутящего момента нагрузки электродвигателя (5) совпадают друг с другом.
Пятый аспект изобретения относится к устройству преобразования мощности первого аспекта изобретения, в котором контроллер (40) оценивает пиковое значение тока и уменьшает диапазон изменения выходного крутящего момента электродвигателя (5) таким образом, чтобы оцененное пиковое значение тока не превышало заданного верхнего предела.
В соответствии с такой конфигурацией выполняется оценка для нахождения пикового значения тока.
Шестой аспект изобретения относится к устройству преобразования мощности любого из аспектов изобретения с первого по пятый, которое дополнительно содержит схему (11) преобразователя, выполненную с возможностью выпрямления напряжения от источника (6) питания переменного тока; звено (15) постоянного тока, содержащее конденсатор (16), подключенный параллельно выходу схемы (11) преобразователя; и схему (20) инвертора, служащую в качестве секции преобразования и выполненную с возможностью преобразования напряжения, выдаваемого со звена (15) постоянного тока, в напряжение переменного тока для выдачи напряжения переменного тока в электродвигатель (5). Величина емкости конденсатора (16) устанавливается такой, чтобы напряжение, подаваемое на схему (20) инвертора, имело большую пульсацию.
В устройстве преобразования мощности шестого аспекта изобретения конденсатор (16) имеет крайне малую электростатическую емкость, а напряжение, подаваемое на схему (20) инвертора, имеет большую пульсацию.
В соответствии с первым аспектом изобретения в тех случаях, когда пиковый ток электродвигателя (5) превышает заданное значение, выходной крутящий момент электродвигателя (5) снижается. Благодаря этому можно заранее избежать повреждения переключающих устройств и т.д. из-за крайне высокого значения тока электродвигателя (5).
В частности, во втором аспекте изобретения ввиду того, что выполняется удержание пикового значения для удержания значения тока электродвигателя (5) в заданный период определения, пиковый ток может быть найден в момент времени, в который пиковое значение крутящего момента нагрузки и пиковое значение напряжения источника питания совпадают или практически совпадают друг с другом. Благодаря этому можно обеспечить обнаружение увеличения значения тока электродвигателя (5) и защиту переключающих устройств и т.д.
В частности, в третьем или четвертом аспекте изобретения рабочая частота электродвигателя (5) регулируется таким образом, что момент времени пикового значения крутящего момента нагрузки и момент времени пикового значения напряжения звена постоянного тока в период определения совпадают или практически совпадают друг с другом. Рабочая частота обычно определяется на основе частоты источника питания. Благодаря этому, например, в случае, когда частота источника (6) питания переменного тока изменяется относительно требуемой частоты (например, 50 Гц или 60 Гц), может быть сформировано биение с требуемым циклом. Кроме того, например, в случае, если изменяется тактирование микрокомпьютера, может быть сформировано биение с требуемым циклом. В результате может быть обеспечено, чтобы пиковое значение тока в период определения было найдено в момент времени, в который пиковое значение крутящего момента нагрузки и пиковое значение напряжения звена постоянного тока совпадают или практически совпадают друг с другом.
В пятом аспекте изобретения пиковое значение тока легко может быть найдено.
В шестом аспекте изобретения, в так называемом «безконденсаторном устройстве преобразования мощности», в котором конденсатор имеет крайне малую электростатическую емкость, может быть обеспечено обнаружение увеличения значения тока электродвигателя (5) и защита переключающих устройств и т.д.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
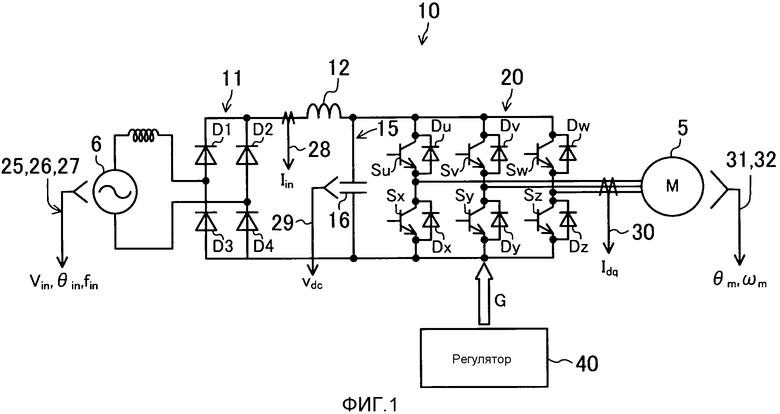
Фиг. 1 представляет собой принципиальную электрическую схему устройства преобразования мощности одного варианта осуществления.
Фиг. 2 представляет собой блок-схему, детально иллюстрирующую контроллер устройства преобразования мощности.
Фиг. 3 представляет собой блок-схему, детально иллюстрирующую контроллер крутящего момента устройства преобразования мощности.
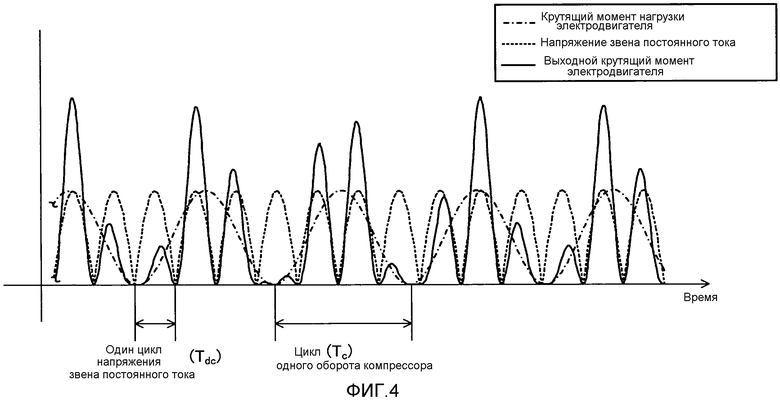
Фиг. 4 представляет собой диаграмму, иллюстрирующую при управлении крутящим моментом (величина управления крутящим моментом=100%) форму сигнала крутящего момента нагрузки электродвигателя, форму сигнала напряжения звена постоянного тока и форму сигнала выходного крутящего момента электродвигателя.
Фиг. 5 представляет собой диаграмму, иллюстрирующую при управлении крутящим моментом (величина управления крутящим моментом=150%) форму сигнала крутящего момента нагрузки электродвигателя, форму сигнала напряжения звена постоянного тока и форму сигнала выходного крутящего момента электродвигателя в состоянии, в котором ограничителем не ограничивается отрицательный крутящий момент.
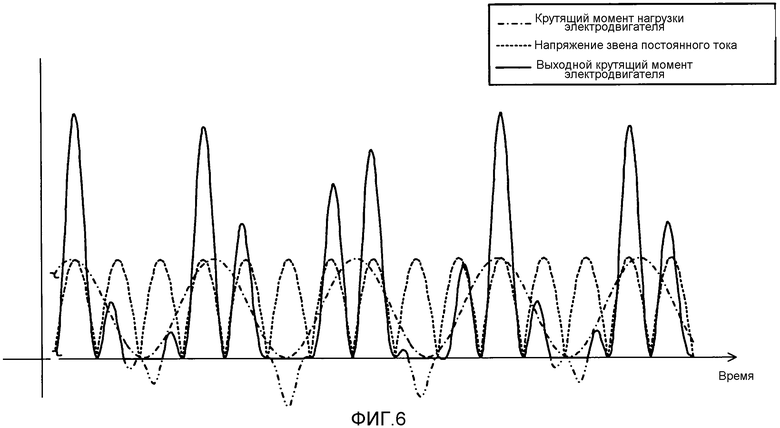
Фиг. 6 представляет собой диаграмму, иллюстрирующую при управлении крутящим моментом (величина управления крутящим моментом=150%) форму сигнала крутящего момента нагрузки электродвигателя, форму сигнала напряжения звена постоянного тока и форму сигнала выходного крутящего момента электродвигателя в состоянии, в котором ограничителем ограничивается отрицательный крутящий момент.
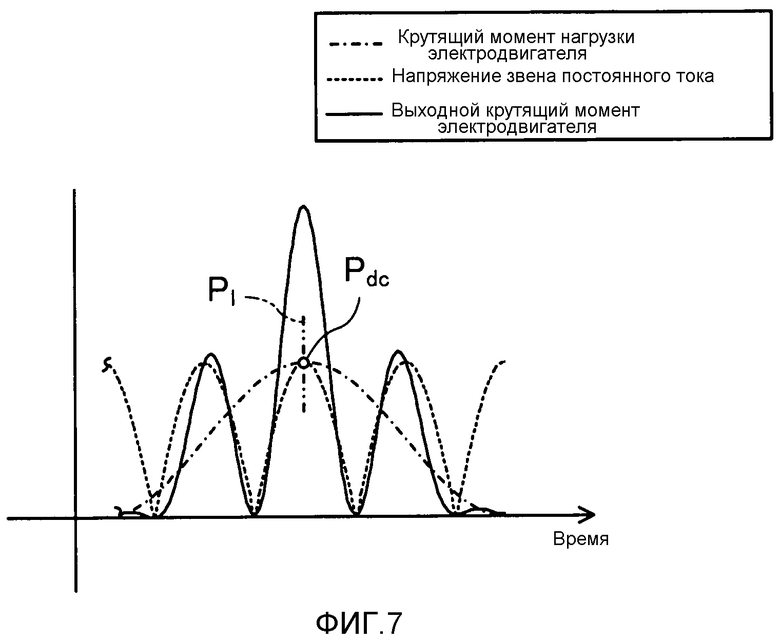
Фиг. 7 представляет собой диаграмму, иллюстрирующую при управлении крутящим моментом форму сигнала крутящего момента нагрузки электродвигателя, форму сигнала напряжения звена постоянного тока и форму сигнала выходного крутящего момента электродвигателя в состоянии, в котором пиковое значение крутящего момента нагрузки и пиковое значение напряжения звена постоянного тока совпадают друг с другом.
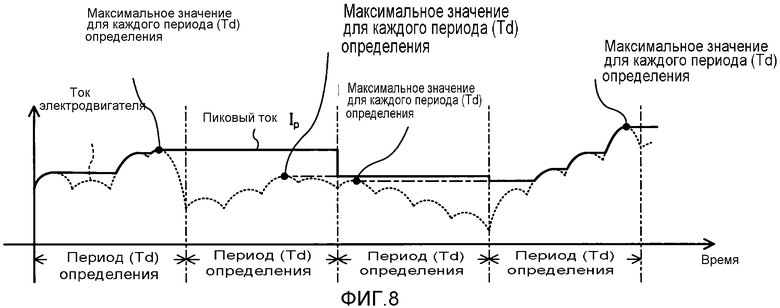
Фиг. 8 представляет собой диаграмму, иллюстрирующую операцию удержания пикового значения при управлении крутящим моментом.
Фиг. 9 представляет собой диаграмму, иллюстрирующую состояние, в котором пиковое значение крутящего момента нагрузки электродвигателя и пиковое значение напряжения звена постоянного тока постепенно смещаются относительно друг друга.
Фиг. 10 представляет собой блок-схему контроллера опорной скорости.
Фиг. 11 представляет собой диаграмму, иллюстрирующую цикл возникновения биения и период определения для операции удержания пикового значения в состоянии, в котором биение не формируется в каждом периоде определения.
Фиг. 12 представляет собой структурную схему, иллюстрирующую управление, выполняемое контроллером опорной скорости.
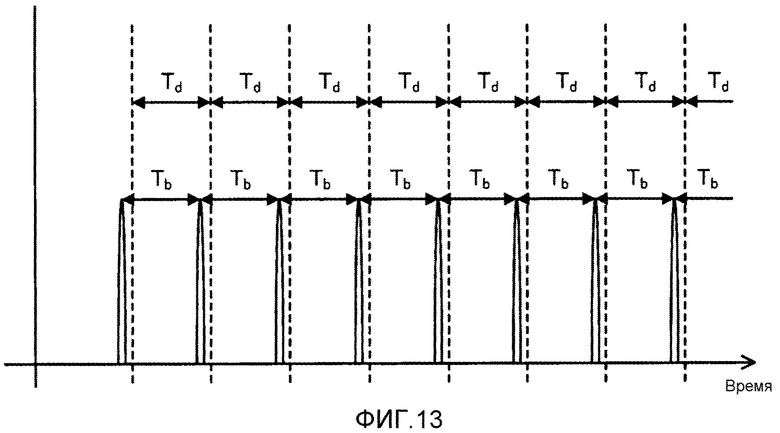
Фиг. 13 представляет собой диаграмму, иллюстрирующую цикл возникновения биения и период определения для операции удержания пикового значения в состоянии, в котором биение формируется в каждом периоде определения.
Фиг. 14 представляет собой диаграмму, иллюстрирующую в качестве примера увеличение напряжения звена постоянного тока в связи с резонансом между дросселем и конденсатором.
Фиг. 15 представляет собой принципиальную электрическую схему устройства преобразования мощности первой модификации.
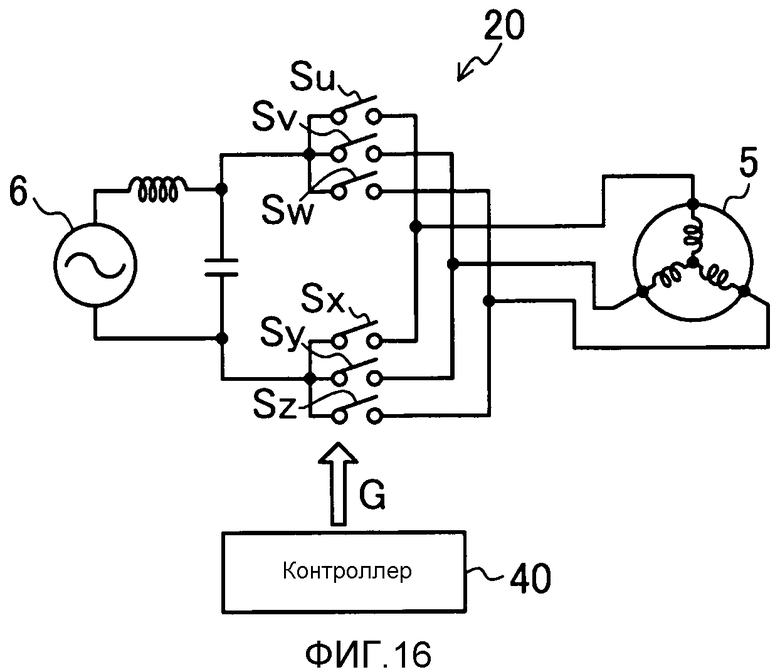
Фиг. 16 представляет собой электрическую схему устройства преобразования мощности второй модификации.
Фиг. 17 представляет собой электрическую схему устройства преобразования мощности третьей модификации.
Фиг. 18 представляет собой диаграмму, иллюстрирующую пример изменения крутящего момента сжатия.
Фиг. 19 представляет собой блок-схему, иллюстрирующую конфигурацию контроллера второго варианта осуществления настоящего изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже со ссылками на чертежи подробно описываются варианты осуществления настоящего изобретения. Необходимо отметить, что описываемые ниже варианты осуществления излагаются лишь с целью представления предпочтительных по характеру примеров и не предполагают ограничения объема, применений и использования изобретения.
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Устройство (10) преобразования мощности настоящего изобретения подключается, например, к трехфазному электродвигателю (5) переменного тока компрессора, подключенного к схеме циркуляции хладагента установки кондиционирования воздуха. Компрессор представляет собой, например, роторный компрессор, содержащий один цилиндр. То есть в таком компрессоре крутящий момент сжатия (т.е. крутящий момент нагрузки электродвигателя (5)) пульсирует в течение одного оборота приводного вала. Электродвигатель (5) представляет собой, например, 4-полюсный 6-пазовый бесщеточный электродвигатель постоянного тока с концентрированной обмоткой. Как описывается ниже, устройство (10) преобразования мощности выполнено таким образом, чтобы выполнять управление крутящим моментом для управления крутящим моментом, создаваемым в электродвигателе (5) для снижения вибрации электродвигателя (5).
ОБЩАЯ КОНФИГУРАЦИЯ УСТРОЙСТВА ПРЕОБРАЗОВАНИЯ МОЩНОСТИ
В соответствии с фиг. 1 устройство (10) преобразования мощности содержит схему (11) преобразователя, звено (15) постоянного тока, схему (20) инвертора и контроллер (40). Устройство (10) преобразования мощности преобразует мощность переменного тока, поступающую с однофазного источника (6) питания переменного тока, в мощность, имеющую заданную частоту, а затем подает мощность в электродвигатель (5).
Схема (11) преобразователя соединена с источником (6) питания переменного тока. Схема (11) преобразователя представляет собой так называемую «схему диодного моста», в которой множество диодов (D1-D4) (четыре в настоящем варианте осуществления) соединены друг с другом в конфигурации моста. Схема (11) преобразователя представляет собой схему двухполупериодного выпрямления, выполненную с возможностью двухполупериодного выпрямления выходного сигнала переменного тока источника (6) питания переменного тока в постоянный ток.
Звено (15) постоянного тока подключено параллельно выходной стороне схемы (11) преобразователя. Дроссель (12) подключен между схемой (11) преобразователя и звеном (15) постоянного тока. Звено (15) постоянного тока содержит конденсатор (16). Напряжение постоянного тока (напряжение Vdc звена постоянного тока), создаваемое на обоих концах конденсатора (16), подается на входные узлы схемы (20) инвертора.
Конденсатор (16) представляет собой, например, пленочный конденсатор. Конденсатор (16) выполнен таким образом, чтобы иметь относительно низкую электростатическую емкость (например, десятки мкФ). В частности, конденсатор (16) имеет такую электростатическую емкость, что при работе переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz) схемы (20) инвертора пульсирующее напряжение (колебание напряжения), создаваемое в связи с работой переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz), может сглаживаться. Кроме того, конденсатор (16) имеет такую электростатическую емкость, что напряжение (колебание напряжения из-за напряжения источника питания), выпрямляемое схемой (11) преобразователя, не может сглаживаться. Благодаря этому звено (15) постоянного тока принимает выходной сигнал схемы (11) преобразователя, при этом напряжение Vdc звена постоянного тока, пульсирующее с частотой, вдвое превышающей напряжение Vin питания источника (6) питания переменного тока, выдается через оба вывода конденсатора (16). Напряжение Vdc звена постоянного тока, выдаваемое со звена (15) постоянного тока, имеет столь большую пульсацию, что его максимальное значение составляет не менее его двойного минимального значения.
Схема (20) инвертора служит в качестве секции преобразования. Входной узел схемы (20) инвертора подключен параллельно конденсатору (16) звена (15) постоянного тока. Схема (20) инвертора преобразует выход звена (15) постоянного тока в трехфазный переменный ток путем переключения и подает такой переменный ток на соединенный с ней электродвигатель (5). Схема (20) инвертора настоящего варианта осуществления выполнена таким образом, что множество переключающих устройств соединено друг с другом в конфигурации моста. Поскольку схема (20) инвертора выдает трехфазный переменный ток в электродвигатель (5), схема (20) инвертора имеет шесть переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz). В частности, схема (20) инвертора содержит три переключающие ветви, в каждой из которых два переключающих устройства последовательно соединены друг с другом. Каждая из переключающих ветвей соединена с фазной обмоткой (не показана на чертеже) электродвигателя (5) в средней точке между переключающим устройством (Su, Sv, Sw) верхнего плеча и переключающим устройством (Sx, Sy, Sz) нижнего плеча. Каждый из обратных диодов (Du, Dv, Dw, Dx, Dy, Dz) соединен встречно-параллельно с соответствующим одним из переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz). Схема (20) инвертора переключает переключающие устройства (Su, Sv, Sw, Sx, Sy, Sz) между включением и выключением для преобразования напряжения (Vdc) звена постоянного тока, выдаваемого со звена (15) постоянного тока, в трехфазное напряжение переменного тока, а затем подает такое напряжение на электродвигатель (5).
Устройство (10) преобразования мощности содержит различные детекторы. В частности, устройство (10) преобразования мощности содержит детектор (25) напряжения источника питания, выполненный с возможностью обнаружения напряжения (Vin) источника (6) питания переменного тока, детектор (26) фазы источника питания, выполненный с возможностью обнаружения фазы (θin) источника (6) питания переменного тока, и детектор (27) частоты источника питания, выполненный с возможностью обнаружения частоты (fin) источника (6) питания переменного тока. Кроме того, устройство (10) преобразования мощности дополнительно содержит детектор (28) входного тока, выполненный с возможностью обнаружения входного тока (Iin) схемы (11) преобразователя, и детектор (29) напряжения звена постоянного тока, выполненный с возможностью обнаружения напряжения (Vdc) звена (15) постоянного тока. Кроме того, устройство (10) преобразования мощности дополнительно содержит детектор (30) тока электродвигателя, выполненный с возможностью обнаружения тока (Idq), протекающего через электродвигатель (5) (в частности, тока, протекающего через каждую фазу электродвигателя (5)), детектор (31) фазы электродвигателя, выполненный с возможностью обнаружения фазы (θm) электродвигателя (5), и детектор (32) скорости вращения, выполненный с возможностью обнаружения фактической скорости (ωm) вращения электродвигателя (5).
Контроллер (40) выдает в схему (20) инвертора отпирающий сигнал (G) для управления переключением (включением/выключением) схемы (20) инвертора. Контроллер (40) настоящего варианта осуществления выполнен таким образом, чтобы выполнять управление крутящим моментом, с помощью которого пульсирующая составляющая напряжения источника питания объединяется с выходным крутящим моментом электродвигателя (5), а выходной крутящий момент электродвигателя (5) изменяется в зависимости от изменения крутящего момента нагрузки электродвигателя (5).
ДЕТАЛЬНАЯ КОНФИГУРАЦИЯ КОНТРОЛЛЕРА
В соответствии с фиг. 2 контроллер (40) содержит контроллер (41) скорости вращения, контроллер (50) крутящего момента, блок (42) наложения управления крутящим моментом, модулятор (43) опорного крутящего момента, сумматор (44) составляющих двойной частоты, опорный генератор (45) входного тока, усилитель (46), ограничитель (60), контроллер (47) тока и оператор (48) широтно-импульсной модуляции (ШИМ).
В вычитателе (34) отклонение находится путем вычитания фактической скорости (ωm) вращения электродвигателя (5) из опорной скорости (ω∗) вращения электродвигателя. Затем такое отклонение вводится в качестве входных данных в контроллер (41) скорости вращения. Контроллер (41) скорости вращения выполняет пропорционально-интегральное вычисление (ПИ вычисление) отклонения между фактической скоростью (ωm) вращения и опорной скоростью (ω∗) вращения, посредством чего вычисляется среднее значение (средний крутящий момент) крутящего момента нагрузки электродвигателя (5). Средний крутящий момент представляет собой среднее значение крутящего момента нагрузки, пульсирующего с заданным циклом. Контроллер (41) скорости вращения выдает в качестве опорного значения (среднего опорного значения крутящего момента (Tave∗)) средний крутящий момент в блок (42) наложения управления крутящим моментом.
В блоке (42) наложения управления крутящим моментом среднее опорное значение крутящего момента (Tave∗) умножается на опорное значение, выдаваемое с контроллера (50) крутящего момента, который подробно описывается ниже. Таким образом, в блоке (42) наложения управления крутящим моментом формируется опорное значение (Т∗) крутящего момента, объединенного с пульсирующей составляющей крутящего момента нагрузки электродвигателя (5). Опорное значение, сформированное в блоке (42) наложения управления крутящим моментом, вводится в модулятор (43) опорного крутящего момента.
Модулятор (43) опорного крутящего момента генерирует значение синуса sinθin по вводимому в него фазовому углу (фазе источника питания (θin)) источника (6) питания переменного тока. Затем модулятор (43) опорного крутящего момента умножает опорное значение (Т∗) крутящего момента на коэффициент r модуляции, соответствующий значению синуса sinθin, а затем выдает найденное значение в сумматор (44) составляющих двойной частоты. Сумматор (44) составляющих двойной частоты добавляет частотную составляющую с частотой вдвое выше частоты источника питания в выходное значение модулятора (43) опорного крутящего момента таким образом, что выходная мощность электродвигателя (5) приобретает синусоидальный характер. Коэффициент r модуляции составляет, например, |sin(θin)| или sin2(θin). Необходимо отметить, что коэффициент r модуляции может варьироваться в зависимости от частоты источника питания (50 Гц или 60 Гц) с целью приближения выходной мощности электродвигателя (5) к синусоидальной волне. В соответствии с другим вариантом коэффициент r модуляции может определяться в зависимости от значения синуса sin(θin+Δ), находимого путем сдвига фазы (θin) на заданную величину Δ таким образом, что выходная мощность электродвигателя (5) приобретает синусоидальный характер. Посредством этого реализуются преимущества, практически аналогичные преимуществам в том случае, когда добавляется частотная составляющая с частотой вдвое выше частоты источника питания.
При этом генератор (45) опорного входного тока выполняет преобразование Фурье входного тока (Iin) для извлечения основной частотной составляющей и умножает основную частотную составляющую на sin(θin) для формирования опорного значения (Iin∗) для входного тока. После того как абсолютное значение (|Iin|) для входного тока вычитается из опорного значения (Iin∗) в вычитателе (35), найденное значение выдается в усилитель (46). В усилителе (46) выходное значение, найденное путем вычитания, умножается на заданный коэффициент усиления.
Выходное значение с сумматора (44) составляющих двойной частоты и выходное значение с усилителя (46) суммируются друг с другом в сумматоре (36). После того как опорное значение, найденное суммированием, обработано в ограничителе (60), который подробно описывается ниже, найденное значение вводится в вычитатель (37). В вычитателе (37) фактический ток (Idq) электродвигателя вычитается из опорного значения, выдаваемого с ограничителя (60), и найденное значение выдается в контроллер (47) тока. Контроллер (47) тока генерирует опорное значение напряжения (Vdq∗) на основе опорного значения тока и выдает опорное значение напряжения (Vdq∗) в оператор (48) ШИМ.
Оператор (48) ШИМ на основе опорного значения напряжения (Vdq∗) генерирует отпирающий сигнал (G) для управления включением/выключением переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz). Это обеспечивает включение/выключение переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz) с заданным рабочим циклом.
БАЗОВАЯ КОНФИГУРАЦИЯ КОНТРОЛЛЕРА КРУТЯЩЕГО МОМЕНТА
Контроллер (50) крутящего момента выполнен с возможностью определения/выдачи на основе, например, крутящего момента нагрузки электродвигателя (5) величины управления для вышеупомянутого опорного значения крутящего момента. В соответствии с фиг. 3 контроллер (50) крутящего момента содержит блок (52) извлечения основной составляющей, усилитель (53), регулятор (54) величины управления крутящим моментом и блок (55) удержания пикового значения.
Средство (52) извлечения основной составляющей выполняет преобразование Фурье для извлечения из пульсирующей составляющей крутящего момента нагрузки электродвигателя (5) основной составляющей (фундаментальной частотной составляющей), которой больше всего подвержена вибрация электродвигателя (5). Усилитель (53) умножает основную составляющую, извлеченную с помощью блока (52) извлечения основной составляющей, на заданный коэффициент усиления и выдает найденное значение в регулятор (54) величины управления крутящим моментом.
Регулятор (54) величины управления крутящим моментом выдает в качестве конечной величины управления крутящим моментом опорное значение, подлежащее умножению на среднее опорное значение крутящего момента (Tave∗), в блок (42) наложения управления крутящим моментом. При этом блок (42) наложения управления крутящим моментом выдает опорное значение крутящего момента (T∗), диапазон изменений которого больше, чем у среднего опорного значения крутящего момента (Tave∗). В том случае, когда диапазон изменений опорного значения крутящего момента (T∗), найденного умножением, равен диапазону изменений среднего опорного значения крутящего момента (Tave∗), диапазон изменений выходного крутящего момента электродвигателя (5) соответствует среднему значению (среднему крутящему моменту) крутящего момента нагрузки. В таком случае отношение диапазона изменений выходного крутящего момента к диапазону изменений среднего крутящего момента, т.е. величина управления крутящим моментом составляет 100%. В настоящем варианте осуществления основная составляющая, которая является главной составляющей вибрации электродвигателя (5), больше среднего крутящего момента. Таким образом, если управление крутящим моментом выполняется таким образом, чтобы в достаточной степени уменьшить вибрацию, величина управления крутящим моментом, как правило, составляет не менее 100%. То есть в соответствии с настоящим вариантом осуществления при управлении крутящим моментом выходной крутящий момент электродвигателя (5) управляется с тем, чтобы иметь форму колебаний с диапазоном изменений больше среднего значения крутящего момента нагрузки электродвигателя (5).
Блок (55) удержания пикового значения, изображенный на фиг. 3, служит в качестве блока нахождения пикового значения тока, выполненного с возможностью удержания в течение заданного периода определения максимальной величины тока (Idq), протекающего через электродвигатель (5), и нахождения пикового значения тока. В тех случаях, когда пиковое значение тока превышает заданный верхний предел, регулятор (54) величины управления крутящим моментом регулирует выходное опорное значение таким образом, что величина управления крутящим моментом уменьшается. Кроме того, регулятор (54) величины управления крутящим моментом регулирует выходное опорное значение для величины управления крутящим моментом на основе напряжения (Vdc) звена постоянного тока, обнаруженного детектором (29) напряжения звена постоянного тока.
БАЗОВАЯ ОПЕРАЦИЯ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ
Ниже подробно описывается управление крутящим моментом. Входное опорное значение контроллера (47) тока объединяется с опорным значением крутящего момента для создания выходного крутящего момента, уменьшающего крутящий момент нагрузки электродвигателя (5). Таким образом, при управлении крутящим моментом выходной крутящий момент электродвигателя (5) управляется, как показано, например, на фиг. 4. Необходимо отметить, что фиг. 4 иллюстрирует хронологическое изменение крутящего момента нагрузки электродвигателя (5), напряжения (Vdc) звена постоянного тока, выдаваемого из звена (15) постоянного тока, и выходного крутящего момента электродвигателя (5) в условиях, когда частота fin источника (6) питания переменного тока=50 Гц, скорость вращения электродвигателя (5) =30 оборотов в секунду, а величина управления крутящим моментом =100%.
В устройстве (10) преобразования мощности настоящего варианта осуществления напряжение (Vdc) звена постоянного тока пульсирует с циклом (Tdc), при этом крутящий момент нагрузки электродвигателя (5) также пульсирует с циклом (Tdc). Таким образом, выходной крутящий момент управляется таким образом, что пульсация напряжения питания источника (6) питания переменного тока и пульсация крутящего момента нагрузки объединяются друг с другом. В результате выходной крутящий момент является относительно большим, например, в момент времени, в который пиковое значение напряжения (Vdc) звена постоянного тока и пиковое значение крутящего момента нагрузки относительно близки друг к другу. Поскольку выходной крутящий момент электродвигателя (5) управляется таким образом, чтобы объединяться с крутящим моментом нагрузки, изменение скорости вращения электродвигателя (5) уменьшается, и, следовательно, вибрация электродвигателя (5) уменьшается. В частности, в настоящем варианте осуществления виду того, что выходной крутящий момент электродвигателя (5) управляется таким образом, что основная частотная составляющая крутящего момента нагрузки, которая является главным фактором для вибрации, уменьшается, вибрация электродвигателя (5) может быть эффективно понижена.
ОГРАНИЧИТЕЛЬ
При вышеизложенном управлении крутящим моментом величина управления крутящим моментом составляет не менее 100% с целью уменьшения основной составляющей вибрации электродвигателя (5). По этой причине при управлении крутящим моментом, вероятно, диапазон изменения (амплитуда) выходного крутящего момента электродвигателя (5) возрастает. Таким образом, в тех случаях, когда амплитуда выходного крутящего момента возрастает, как описано выше, а выходной крутящий момент достигает отрицательной величины, возможно возникновение рекуперации электродвигателя (5).
В частности, например, изображенный на фиг. 5 пример иллюстрирует хронологическое изменение крутящего момента нагрузки электродвигателя (5), напряжения (Vdc) звена постоянного тока, выдаваемого из звена (15) постоянного тока, и выходного крутящего момента электродвигателя (5) в условиях, когда частота fin источника (6) питания переменного тока=50 Гц, скорость вращения электродвигателя (5)=30 оборотов в секунду, а величина управления крутящим моментом=150%. В таком примере диапазон изменения выходного крутящего момента увеличивается ввиду увеличения величины управления крутящим моментом. В связи с таким увеличением выходной крутящий момент падает ниже нуля и изменяется на отрицательное значение. В результате рекуперация электродвигателя (5) происходит в диапазонах, каждый из которых на фиг. 5 окружен пунктирной линией.
С другой стороны, в устройстве (10) преобразования мощности настоящего варианта осуществления электростатическая емкость конденсатора (16) звена (15) постоянного тока устанавливается равной крайне малому значению. При этом в тех случаях, когда происходит рекуперация электродвигателя (5), как описано выше, возможно возникновение перенапряжения звена (15) постоянного тока ввиду недостаточного поглощения энергии рекуперации конденсатором (16) и поэтому, например, повреждение переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz). По этой причине в настоящем варианте осуществления в соответствии с фиг. 2 в контроллере (40) предусмотрен ограничитель (60) для предотвращения достижения выходным крутящим моментом отрицательного значения. То есть ограничитель (60) для вводимого в него опорного значения формирует опорное значение для ограничения отрицательного выходного крутящего момента таким образом, что выходной крутящий момент электродвигателя (5) не достигает отрицательного значения. При этом выходной крутящий момент (выходной крутящий момент, показанный на фиг. 6 двойной штрих-пунктирной линией), изменяющийся на отрицательное значение в прототипе, в соответствии, например, с фиг. 6 сохраняется на уровне выше отрицательного значения (например, выходной крутящий момент=0). В результате обеспечивается снижение или предотвращение рекуперации электродвигателя (5) и защита, например, переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz). При управлении, выполняемом ограничителем (60), на положительный выходной крутящий момент ограничение не налагается. Таким образом, при управления крутящим моментом может быть найден достаточный выходной крутящий момент электродвигателя (5), а вибрация электродвигателя (5) может быть эффективно уменьшена.
В настоящем варианте осуществления ввиду того, что ограничитель (60) предусмотрен непосредственно перед входной стороной контроллера (47) тока, обеспечивается предотвращение достижения выходным крутящим моментом отрицательного значения. Однако ограничитель (60) может быть предусмотрен на другой части на входной стороне контроллера (47) тока. В частности, ограничитель (60) может быть предусмотрен на выходной стороне регулятора (54) величины управления крутящим моментом контроллера (50) крутящего момента.
УМЕНЬШЕНИЕ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ ПОСЛЕ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ
При вышеизложенном управлении крутящим моментом ток (Idq) электродвигателя возрастает ввиду увеличения выходного крутящего момента электродвигателя (5). В частности, в соответствии с фиг. 7, когда момент времени пикового значения (пикового значения (pl), показанного на фиг. 7 двойной штрих-пунктирной линией) крутящего момента нагрузки электродвигателя (5) и момент времени пикового значения (пикового значения (Pdc), показанного на фиг. 7 белым кругом) напряжения (Vdc) звена постоянного тока совпадают или практически совпадают друг с другом, выходной крутящий момент электродвигателя (5) крайне высок. При этом в тех случаях, когда моменты времени пиковых значений (Pl Pdc) совпадают друг с другом, ток электродвигателя (5) резко возрастает. Когда ток электродвигателя (5) резко возрастает, как описано выше, величина тока переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz) превышает максимально допустимую величину номинального тока, что приводит к повреждению переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz) или размагничиванию магнита электродвигателя (5). Кроме того, если в качестве мер по предотвращению вышеуказанного нарушения работоспособности допустимая нагрузка по току устройства повышается, расходы на устройство (10) преобразования мощности увеличиваются.
В качестве мер по предотвращению вышеуказанного нарушения работоспособности предусматривается, что величина тока электродвигателя (5) произвольно обнаруживается и величина управления крутящим моментом регулятора (54) величины управления крутящим моментом управляется таким образом, что величина тока не превышает заданный верхний предел. Однако в настоящем варианте осуществления ввиду того, что напряжение (Vdc) звена постоянного тока пульсирует с заданной частотой, как описано выше, момент времени пикового значения (Pdc) напряжения (Vdc) звена постоянного тока и момент времени пикового значения (Pl) крутящего момента нагрузки не всегда совпадают друг с другом (см., например, фиг. 4). При этом даже если ток электродвигателя (5) обнаруживается в момент времени, в который пиковые значения (Pdc, Pl) смещены относительно друг друга, величина такого тока электродвигателя (5) относительно невелика, и требуемый пиковый ток не может быть обнаружен.
По вышеуказанной причине в регуляторе (40) настоящего варианта осуществления предусмотрен блок (55) удержания пикового значения, поэтому может быть обеспечено обнаружение пикового тока электродвигателя (5).
Блок (55) удержания пикового значения выполнен с возможностью удержания в течение заданного периода определения (Td), установленного заранее, максимального значения тока электродвигателя, обнаруженного детектором (30) тока электродвигателя (в строгом понимании, пикового значения фазного тока электродвигателя (5) в каждом цикле управления). Данный вопрос подробно рассматривается ниже со ссылкой на фиг. 8.
Ток электродвигателя произвольно вводится в блок (55) удержания пикового значения. Блок (55) удержания пикового значения находит максимальную величину тока электродвигателя (например, пиковый ток (Ip)) в течение каждого заданного периода определения (Td). В настоящем варианте осуществления пиковый ток (Ip), находимый в некоторый период определения, также удерживается в следующем периоде определения (Td). Поскольку пиковый ток (Ip) удерживается в заданном периоде определения (Td), легче обнаруживать ток электродвигателя (5) в момент времени, в который момент времени пикового значения (Pl) крутящего момента нагрузки и момент времени пикового значения (Pdc) напряжения (Vdc) звена постоянного тока совпадают друг с другом. Необходимо отметить, что период определения (Td) устанавливается такой длительности (например, 1 секунда), что момент времени, в который пиковые значения (Pl, Pdc) совпадают друг с другом, с успехом может быть обнаружен.
В соответствии с фиг. 8, если обнаруженный ток электродвигателя выше пикового тока (Ip) предыдущего периода (Td) определения в некотором периоде (Td) определения, пиковый ток (Ip) обновляется. То есть в некотором периоде (Td) определения пиковый ток (Ip) обновляется таким образом, что максимальное значение тока электродвигателя отслеживается произвольно. Таким образом, даже в случае, если средний крутящий момент резко возрастает в периоде (Td) определения, пиковое значение тока может быть оперативно обнаружено.
Пиковый ток (Ip), обнаруживаемый блоком (55) удержания пикового значения, выдается в регулятор (54) величины управления крутящим моментом. Регулятор (54) величины управления крутящим моментом при превышении пиковым током (Ip) заданного верхнего предела управляет величиной управления крутящим моментом для уменьшения выходного крутящего момента электродвигателя (5). В результате предотвращается избыточный ток при управлении крутящим моментом, и, следовательно, вышеупомянутого нарушения работоспособности можно избежать заранее. Необходимо отметить, что верхний предел для пикового тока (Ip) устанавливается на заданном уровне ниже, например, максимально допустимого номинального значения тока для переключающих устройств (Su, Sv, Sw, Sx, Sy, Sz).
РЕГУЛИРОВАНИЕ ОПОРНОЙ СКОРОСТИ ВРАЩЕНИЯ ПРИ УПРАВЛЕНИИ КРУТЯЩИМ МОМЕНТОМ
Как описано выше, даже если блок (55) удержания пикового значения удерживает в течение каждого периода (Td) определения пиковый ток (Ip) для тока электродвигателя, а период (Td) определения является крайне длительным, управляемость величины управления крутящим моментом может ухудшиться. В частности, предположим, что пиковый ток (Ip) удерживается в течение периода (Td) определения, и средний крутящий момент уменьшается в течение такого периода (Td) определения. Хотя в действительности величина управления крутящим моментом может быть несколько понижена, величина управления крутящим моментом ограничена, как описано выше. При этом эффективность управления крутящим моментом снижается.
Данный вопрос подробно рассматривается ниже со ссылкой на фиг. 9. Фиг. 9 иллюстрирует пример формы колебаний напряжения (Vdc) звена постоянного тока и формы колебаний крутящего момента нагрузки электродвигателя (5). В данном примере момент времени пикового значения (Pdc) напряжения (Vdc) звена постоянного тока и момент времени пикового значения (Pl) крутящего момента нагрузки электродвигателя (5) совпадают друг с другом в момент t1. Кроме того, в данном примере частота (fdc) напряжения звена постоянного тока и n-кратное - где n является целым числом - частоты (т.е. рабочей частоты fc электродвигателя (5)) крутящего момента нагрузки незначительно смещены относительно друг друга. При этом на фиг. 9 после того, как пиковые значения (Pl, Pdc) совпадают друг с другом, пиковое значение (Pdc) напряжения (Vdc) звена постоянного тока и пиковое значение (Pl) крутящего момента нагрузки постепенно смещаются относительно друг друга, и смещение (ΔТ, изображенное на фиг. 9) между пиковым значениями постепенно увеличивается. При таких условиях менее вероятно, что моменты времени пиковых значений совпадут друг с другом, и, следовательно, пиковый ток (Ip) не может быть обнаружен в течение длительного периода времени. И наоборот, если установлен длительный период определения (Td) с целью обеспечения обнаружения пикового тока (Ip) в вышеописанных условиях, эффективность управления крутящим моментом понижается, как описано выше.
По вышеуказанным причинам в контроллере (40) настоящего варианта осуществления предусмотрен контроллер (70) опорной скорости, выполненный с возможностью обеспечения обнаружения пикового тока (Ip) в вышеописанных условиях (см. фиг. 10). Контроллер (70) опорной скорости содержит вычислитель (71) цикла биения и регулятор (72) опорной скорости. Вычислитель (71) цикла биения служит в качестве средства нахождения цикла, выполненного с возможностью нахождения, при управления крутящим моментом, цикла (называемого далее циклом (Tb) биения) момента времени, в который момент времени пикового значения (Pdc) напряжения (Vdc) звена постоянного тока и момент времени пикового значения (Pl) крутящего момента нагрузки совпадают или практически совпадают друг с другом. Регулятор (72) опорной скорости выполнен с возможностью управления опорной скоростью (ω∗) электродвигателя (5) на основе цикла (Tb) биения, находимого вычислителем (71) цикла биения для коррекции рабочей частоты (fc) электродвигателя (5).
В частности, например, при управлении крутящим моментом предположим, что пиковое значение (Pdc) напряжения (Vdc) звена постоянного тока и пиковое значение (Pl) крутящего момента нагрузки не совпадают друг с другом в некоторый период (Td) определения, как схематически иллюстрируется на фиг. 11, а цикл (Tb) биения значительно продолжительнее периода (Td) определения блока (55) удержания пикового значения. При таких условиях даже в случае, если выполняется вышеуказанное удержание пикового значения, обнаружение пикового тока (Ip) не может быть обеспечено.
Таким образом, контроллер (70) опорной скорости выполняет управление, изображенное на фиг. 12. На этапе S1 вычислитель (71) цикла биения находит частоту (fdc) пульсации напряжения (Vdc) звена постоянного тока. Частота (fdc) пульсации напряжения (Vdc) звена постоянного тока вычисляется, например, таким образом, что частота (fin) пульсации напряжения источника (6) питания переменного тока, обнаруживаемая детектором (27) частоты источника питания, удваивается (fdc=fin×2).
Затем на этапе S2 вычислитель (71) цикла биения вычисляет целое число n, к которому больше всего приближаются частота (fdc) пульсации напряжения (Vdc) звена постоянного тока и кратное целому числу (n-кратное) рабочей частоты (fc) электродвигателя (5). Предположим, что частота (fin) напряжения источника (6) питания переменного тока составляет 50,1 Гц, частота (fdc) пульсации напряжения (Vdc) составляет 100,2 Гц, а рабочая частота (fc) составляет 25 Гц. Целое число n равно 4.
Далее на этапе S3 вычислитель (71) цикла биения вычисляет в соответствии с приведенным ниже уравнением (1) частоту (частоту (fb) биения)), с которой формируется биение:
fb=fdc-(fc×n) Уравнение (1)
Затем на этапе S4 вычислитель (71) цикла биения находит обратную величину вычисленной частоты (fb) биения для вычисления цикла (Tb) биения. Предположим, что вычисленная частота (fdc) напряжения звена постоянного тока составляет 100,2 Гц, рабочая частота (fc) электродвигателя (5) составляет 25 Гц, а целое число n равно 4. В соответствии с уравнением (1) частота (fb) биения составляет 100,2 Гц-25 Гц×4=0,2 Гц. Таким образом, цикл (Tb) биения составляет 5 секунд.
На этапе S5 регулятор (72) опорной скорости сравнивает вычисленный цикл (Tb) биения и период (Td) определения блока (55) удержания пикового значения. Предположим, что цикл (Tb) биения составляет 5 секунд, период (Td) определения составляет 1 секунду, а цикл (Tb) биения продолжительнее периода (Td) определения. Невозможно обеспечить, чтобы ток электродвигателя в момент времени, в который пиковое значение (Pdc) напряжения (Vdc) звена постоянного тока и пиковое значение (Pl) крутящего момента нагрузки совпадают друг с другом, не мог обнаруживаться для каждого периода (Td) определения как пиковый ток (Ip). При этом на этапе S5 в случае, если Tb>Td, процесс переходит на этап S6, и опорная скорость (ω∗) регулируется таким образом, что регулируется рабочая частота (fc) электродвигателя (5).
В частности, на этапе S6 корректор (72) опорной скорости вращения вычисляет в соответствии с нижеследующим уравнением (2) рабочую частоту (fc∗) для уравнивания цикла (Tb) биения и периода (Td) определения:
fc∗=(fdc-(1/Td))/n Уравнение (2)
Предположим, что частота (fdc) пульсации напряжения (Vdc) звена постоянного тока составляет 100,2 Гц, период (Td) определения составляет 1 секунду, а целое число n равно 4. В соответствии с уравнением (2) рабочая частота (fc∗) для уравнивания цикла (Tb) биения и периода (Td) определения составляет (100,2 Гц-1,0 Гц)/4=24,8 Гц. Регулятор (72) опорной скорости вращения регулирует входную опорную скорость (ω∗) таким образом, что текущая рабочая частота (например, рабочая частота fc, равная 25 Гц) приводится в соответствие с вычисленной рабочей частотой (например, рабочей частотой fc∗, равной 24,8 Гц). Посредством этого уравниваются цикл (Tb) биения и период (Td) определения при последующей операции. Таким образом, в соответствии, например, с фиг. 13 пиковый ток (Ip) может быть найден в течение каждого периода (Td) определения в состоянии, в котором момент времени пикового значения (Pdc) напряжения (Vdc) звена постоянного тока и момент времени пикового значения (Pl) крутящего момента нагрузки совпадают или практически совпадают друг с другом, по меньшей мере, однократно.
Если цикл (Tb) биения дольше периода (Td) определения, регулятор (72) опорной скорости настоящего варианта осуществления регулирует рабочую частоту (fc) электродвигателя (5) таким образом, что цикл (Tb) биения и период (Td) определения равны друг другу. Однако в том случае, если цикл (Tb) биения дольше периода (Td) определения, регулятор (72) опорной скорости вращения может регулировать рабочую частоту (fc) таким образом, что цикл (Tb) биения короче периода (Td) определения. То есть в течение периода (Td) определения момент времени пикового значения (Pdc) напряжения (Vdc) звена постоянного тока и момент времени пикового значения (Pl) крутящего момента нагрузки совпадают или практически совпадают друг с другом, по меньшей мере, однократно.
РЕГУЛИРОВАНИЕ ВЕЛИЧИНЫ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ НА ОСНОВЕ НАПРЯЖЕНИЯ ЗВЕНА ПОСТОЯННОГО ТОКА
Если при управлении крутящим моментом выходной крутящий момент становится чрезмерным при условиях, когда напряжение (Vin) питания источника (6) питания переменного тока является относительно высоким или относительно низким, существует вероятность нарушения (нарушений) работоспособности. В частности, в том случае, когда величина управления крутящим моментом является относительно большой при условиях, в которых напряжение (Vin) питания источника (6) питания переменного тока является относительно высоким и, следовательно, напряжение (Vdc) звена постоянного тока также является относительно высоким, резонанс между дросселем (12) и конденсатором (16) может увеличиться, приводя к крайне высокому напряжению (Vdc) звена постоянного тока (см., например, фиг. 14). Кроме того, в том случае, когда величина управления крутящим моментом является относительно большой при условиях, в которых напряжение (Vin) питания является относительно низким и, следовательно, напряжение (Vdc) звена постоянного тока также является относительно низким, скважность импульсного сигнала оператора (48) ШИМ увеличивается с целью нахождения заданного выходного крутящего момента. В результате существует вероятность того, что управляемость крутящего момента ухудшится ввиду запаздывания ответной реакции при управлении током.
По вышеуказанным причинам в настоящем варианте осуществления регулятор (54) величины управления крутящим моментом регулирует величину управления крутящим моментом на основе пикового значения напряжения (Vdc) звена постоянного тока в половине цикла электропитания. В частности, например, если пиковое значение напряжения (Vdc) звена постоянного тока в половине цикла электропитания превышает заданный верхний предел, регулятор (54) величины управления крутящим моментом уменьшает величину управления крутящим моментом таким образом, что не происходит перенапряжения на звене (15) постоянного тока. Таким образом, в регуляторе (54) величины управления крутящим моментом опорное значение величины управления крутящим моментом ограничено заданной величиной (такой величиной, что напряжение Vdc звена постоянного тока не является перенапряжением). В результате вышеуказанный резонанс между дросселем (12) и конденсатором (16) уменьшается, при этом уменьшается возрастание напряжения (Vdc) звена постоянного тока, как иллюстрируется на фиг. 14.
С другой стороны, например, если пиковое значение напряжения (Vdc) звена постоянного тока в половине цикла электропитания падает ниже заданного нижнего предела, регулятор (54) величины управления крутящим моментом уменьшает величину управления крутящим моментом. Таким образом, в регуляторе (54) величины управления крутящим моментом опорное значение величины управления крутящим моментом ограничено заданной величиной. В результате значительное возрастание скважности импульсного сигнала оператора (48) ШИМ может быть уменьшено, и, следовательно, ухудшение управляемости крутящего момента может быть предотвращено.
Регулятор (54) величины управления крутящим моментом ограничивает величину управления крутящим моментом на основе напряжения (Vdc) звена постоянного тока, обнаруживаемого детектором (29) напряжения звена постоянного тока. Однако величина управления крутящим моментом может ограничиваться способом, аналогичным вышеуказанному способу на основе, например, напряжения (Vin) питания источника (6) питания переменного тока.
ПРЕИМУЩЕСТВА ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
В соответствии с вышеизложенным вариантом осуществления при управлении крутящим моментом ограничитель (60) ограничивает выходной крутящий момент таким образом, что выходной крутящий момент электродвигателя (5) не достигает отрицательного значения (см. фиг. 6). Таким образом, можно обеспечить, чтобы рекуперация электродвигателя (5) была уменьшена или предотвращена, и чтобы переключающие устройства (Su, Sv, Sw, Sx, Sy, Sz) и т.д. были защищены.
В соответствии с вышеизложенным вариантом осуществления при управлении крутящим моментом максимальное значение тока электродвигателя (5) удерживается блоком (55) удержания пикового значения таким образом, что может быть найден пиковый ток (Ip) (см. фиг. 8). Таким образом, величина тока электродвигателя, когда пиковое значение выходного крутящего момента и пиковое значение напряжения (Vdc) звена постоянного тока совпадают друг с другом, легко формируется в виде пикового тока (Ip). Когда пиковый ток (Ip) превышает заданное значение, диапазон изменения выходного крутящего момента уменьшается, и, следовательно, можно обеспечить, чтобы переключающие устройства (Su, Sv, Sw, Sx, Sy, Sz) и т.д. были защищены.
Кроме того, при условиях, когда менее вероятно, что пиковое значение (Pdc) напряжения (Vdc) звена постоянного тока и пиковое значение (Pl) крутящего момента нагрузки совпадают друг с другом в период (Td) определения блока (55) удержания пикового значения, рабочая частота электродвигателя (5) регулируется таким образом, что цикл (Tb) биения и период (Td) определения равны друг другу. Таким образом, в соответствии, например, с фиг. 13 можно обеспечить, чтобы пиковые значения (Pdc, Pl) совпадали друг с другом в каждый период (Td) определения для нахождения пикового тока (Ip).
В соответствии с вышеизложенным вариантом осуществления в случае, если пиковое значение напряжения (Vdc) звена постоянного тока в половине цикла электропитания превышает заданный верхний предел, величина управления крутящим моментом ограничивается заданным значением. Посредством этого заранее сокращается или предотвращается возрастание напряжения (Vdc) звена постоянного тока из-за резонанса между дросселем (12) и конденсатором (16). Кроме того, если пиковое значение напряжения (Vdc) звена постоянного тока в половине цикла электропитания падает ниже заданного нижнего предела, величина управления крутящим моментом также ограничивается заданным значением. Посредством этого уменьшается или предотвращается ухудшение управляемости крутящего момента из-за увеличения скважности оператора (48) ШИМ.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фиг. 19 представляет собой блок-схему, иллюстрирующую конфигурацию контроллера (50) крутящего момента второго варианта осуществления настоящего изобретения. Контроллер (50) крутящего момента настоящего варианта осуществления содержит блок (80) оценки пикового тока вместо того, чтобы содержать блок (55) удержания пикового значения контроллера (50) крутящего момента первого варианта осуществления. Контроллер (50) крутящего момента уменьшает диапазон изменения выходного крутящего момента электродвигателя (5) таким образом, что величина пикового тока, оцениваемая блоком (80) оценки пикового тока, не превышает заданного верхнего предела.
Предположим, что выходное значение сумматора (44) составляющих двойной частоты представлено в виде “Idq1∗”. Соотношение между средним опорным значением крутящего момента (Tave∗), опорным значением крутящего момента (T∗) и выходной величиной (Idq1∗) можно представить с помощью следующих уравнений:
T∗=CT×Tave∗,
Idq1∗=CV×T∗=CV×CT×Tave∗,
где “СТ” соответствует составляющей изменения из-за изменения крутящего момента нагрузки, а “CV” соответствует составляющей изменения из-за пульсации напряжения. Модуль выходной величины (Idq1∗) изменяется в зависимости от вышеуказанных составляющих изменения. Выходная величина (Idq1∗) соответствует модулю тока электродвигателя. Таким образом, в случае нахождения пикового значения выходной величины (Idq1∗) может быть оценена величина пикового тока в схеме (20) инвертора после управления крутящим моментом.
Предположим, что удовлетворяются следующие уравнения:
CT=1+kT×sin(θm),
где “kT” соответствует величине управления крутящим моментом, а “θm” соответствует фазе электродвигателя (механический радиан); и
CV=kV×|sin(θin)|,
где “kV” соответствует величине изменения составляющей пульсации напряжения, а “θin” соответствует фазе напряжения источника питания. Выходная величина (Idq1∗) становится максимальной, когда каждая из фазы (θm) и фазы напряжения источника питания (θin) составляет 90° или 270°. Такая максимальная величина может быть представлена следующим уравнением:
Idq1∗=kV×(1+kT)×Tave.
Таким образом, если найдены kV, kT и Tave, может быть оценена величина пикового тока электродвигателя, изменяющегося в соответствии с картиной биений.
Блок (80) оценки пикового тока находит величину пикового тока в соответствии с приведенными выше уравнениями отношений. Как описано выше, если найдена величина пикового тока, диапазон изменений выходного крутящего момента электродвигателя (5) уменьшается таким образом, что величина пикового тока не превышает заданного верхнего предела, и, следовательно, могут быть реализованы преимущества, аналогичные преимуществам первого варианта осуществления.
ДРУГОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
В вышеизложенных вариантах осуществления в качестве источника питания используется однофазный источник (6) питания переменного тока, но настоящее изобретение не ограничено вышеизложенным. Может использоваться трехфазный источник питания переменного тока, как в примере (первой модификации), изображенном на фиг. 15. Схема (11) преобразователя, изображенная на фиг. 15, представляет собой схему диодного моста, в которой шесть диодов (D1-D6) соединены друг с другом в конфигурации моста.
Кроме того, в вышеизложенных вариантах осуществления настоящее изобретение предназначено для устройства преобразования мощности, содержащего схему (11) преобразователя и схему (20) инвертора, но не ограничено таким устройством. Настоящее изобретение может быть предназначено для матричного преобразователя (20), как, например, в примере (второй модификации), изображенном на фиг. 16, или примере (третьей модификации), изображенном на фиг. 17. Матричный преобразователь (20) служит в качестве секции преобразования, выполненной с возможностью преобразования мощности от источника (6) питания переменного тока в мощность переменного тока, имеющую заданную частоту. В качестве переключающих устройств (Sr, Ss, St, Su, Sv, Sw, Sx, Sy, Sz) матричного преобразователя (20) могут использоваться транзисторы и т.д.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Как описано выше, настоящее изобретение целесообразно применять в устройстве преобразования мощности, выполненном с возможностью управлени крутящим моментом электродвигателя.
РАСШИФРОВКА ССЫЛОЧНЫХ ПОЗИЦИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2012 |
|
RU2543502C1 |
| ПРЕОБРАЗОВАТЕЛЬ МОЩНОСТИ И СИСТЕМА ТЕПЛОВОГО НАСОСА, СНАБЖЕННАЯ ИМ | 2021 |
|
RU2817330C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 2003 |
|
RU2320069C2 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДВИГАТЕЛЯ | 2016 |
|
RU2678834C1 |
| ГИБРИДНОЕ ГЕНЕРАТОРНОЕ УСТРОЙСТВО | 1997 |
|
RU2216847C2 |
| СИСТЕМА И СПОСОБ ДИНАМИЧЕСКОГО РЕГУЛИРОВАНИЯ АКТИВНОЙ МОЩНОСТИ НА НАГРУЗКЕ | 2010 |
|
RU2528621C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОЭНЕРГИИ | 2009 |
|
RU2462806C1 |
| ИСТОЧНИК БЕСПЕРЕБОЙНОГО ПИТАНИЯ (ИБП) С ЧИСТЫМИ ВХОДАМИ, С БЫСТРОДЕЙСТВУЮЩИМ РЕГУЛИРОВАНИЕМ ВЫПРЯМИТЕЛЯ И УВЕЛИЧЕННЫМ СРОКОМ СЛУЖБЫ АККУМУЛЯТОРНОЙ БАТАРЕИ | 2008 |
|
RU2460197C2 |
| СИЛОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2408971C2 |
| СИЛОВОЕ ПРЕОБРАЗОВАТЕЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2466040C1 |











Изобретение относится к области электротехники и может быть использовано в устройствах преобразования мощности для управления электродвигателем. Секция (20) преобразования выполнена с возможностью преобразования посредством переключения множества переключающих устройств (Sr, Ss, St, Su, Sv, Sw, Sx, Sy, Sz) мощности от источника (6) питания переменного тока в мощность переменного тока, имеющую заданную частоту, для выдачи мощности переменного тока в электродвигатель (5). Контроллер (40) выполнен с возможностью управления крутящим моментом таким образом, что выходной крутящий момент электродвигателя (5) содержит пульсирующую составляющую источника питания, представляющую собой пульсирующую составляющую с частотой, кратной в целое число раз частоте выходного напряжения источника (6) питания переменного тока. Выходной крутящий момент электродвигателя (5) изменяется в соответствии с изменением крутящего момента нагрузки электродвигателя (5). Контроллер выполнен с возможностью получения пикового значения тока, когда момент времени пикового значения пульсирующей составляющей источника питания и момент времени пикового значения пульсирующей составляющей крутящего момента нагрузки совпадают или практически совпадают друг с другом, и уменьшения диапазона изменения выходного крутящего момента таким образом, что пиковое значение тока не превышает заданного верхнего предела. 5 з.п. ф-лы, 19 ил.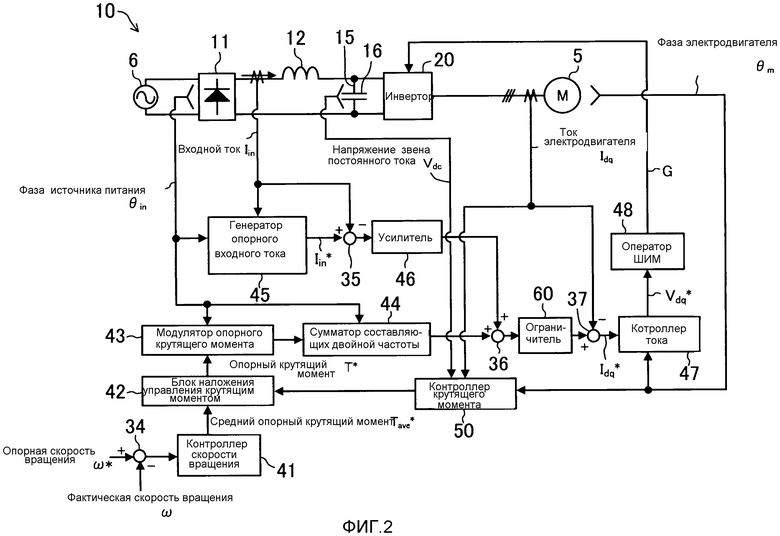
1. Устройство преобразования мощности, содержащее:
секцию (20) преобразования, содержащую множество переключающих устройств (Sr, Ss, St, Su, Sv, Sw, Sx, Sy, Sz) и выполненную с возможностью преобразования, посредством переключения переключающих устройств (Sr, Ss, St, Su, Sv, Sw, Sx, Sy, Sz), мощности от источника (6) питания переменного тока в мощность переменного тока, имеющую заданную частоту, для выдачи мощности переменного тока в электродвигатель (5); и
контроллер (40), выполненный с возможностью выполнения управления крутящим моментом таким образом, что выходной крутящий момент электродвигателя (5) содержит пульсирующую составляющую источника питания, которая представляет собой пульсирующую составляющую с частотой, кратной в целое число раз частоте выходного напряжения источника (6) питания переменного тока, и что выходной крутящий момент электродвигателя (5) изменяется в соответствии с изменением крутящего момента нагрузки электродвигателя (5), и выполненный с возможностью получения пикового значения тока, когда момент времени пикового значения пульсирующей составляющей источника питания и момент времени пикового значения пульсирующей составляющей крутящего момента нагрузки совпадают или практически совпадают друг с другом, и уменьшения диапазона изменения выходного крутящего момента таким образом, что пиковое значение тока не превышает заданного верхнего предела.
2. Устройство преобразования мощности по п. 1, в котором контроллер (40) содержит
блок (55) удержания пикового значения, выполненный с возможностью удержания пикового значения тока в течение заданного периода определения, и
регулятор (54) величины управления крутящим моментом, выполненный с возможностью уменьшения диапазона изменения выходного крутящего момента электродвигателя (5), когда пиковое значение тока, удерживаемое блоком (55) удержания пикового значения, превышает заданный верхний предел.
3. Устройство преобразования мощности по п. 2, в котором контроллер (40) дополнительно включает в себя
регулятор (72) опорной скорости, выполненный с возможностью регулирования рабочей частоты (fc) электродвигателя (5) таким образом, что момент времени пикового значения пульсирующей составляющей крутящего момента нагрузки и момент времени пикового значения пульсирующей составляющей источника питания совпадают или практически совпадают друг с другом во время периода определения блока (55) удержания пикового значения.
4. Устройство преобразования мощности по п. 2 или 3, в котором контроллер (40) дополнительно включает в себя
блок (71) нахождения цикла, выполненный с возможностью нахождения, на основе частоты выходного напряжения источника (6) питания переменного тока и рабочей частоты электродвигателя (5), цикла с моментом времени, в который пиковое значение крутящего момента нагрузки электродвигателя (5) и пиковое значение выходного напряжения источника (6) питания переменного тока совпадают или практически совпадают друг с другом, и
регулятор (72) опорной скорости регулирует рабочую частоту электродвигателя (5) таким образом, что цикл, найденный блоком (71) нахождения цикла, равен или меньше периода определения блока (55) удержания пикового значения.
5. Устройство преобразования мощности по п. 1, в котором контроллер (40) оценивает пиковое значение тока и уменьшает диапазон изменения выходного крутящего момента электродвигателя (5) таким образом, чтобы оцененное пиковое значение тока не превышало заданного верхнего предела.
6. Устройство преобразования мощности по п. 1, дополнительно содержащее
схему (11) преобразователя, выполненную с возможностью выпрямления напряжения от источника питания переменного тока;
звено (15) постоянного тока, содержащее конденсатор (16), подключенный параллельно выходу схемы (11) преобразователя; и
схему (20) инвертора, служащую в качестве секции преобразования и выполненную с возможностью преобразования напряжения, выдаваемого со звена (15) постоянного тока, в напряжение переменного тока для выдачи напряжения переменного тока в электродвигатель (5),
при этом величина емкости конденсатора (16) устанавливается такой, чтобы значение напряжения, подаваемого на схему (20) инвертора, имело большую пульсацию.
| УНИВЕРСАЛЬНЫЙ ЭЛЕКТРОПРИВОД ДЛЯ ШВЕЙНЫХ МАШИН | 1994 |
|
RU2073759C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| Электромагнитный осциллограф | 1947 |
|
SU82077A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259428A1 |
| JP 2008061409 A, 13.03.2008 | |||
| DE 102005007553 A1, 29.09.2005 | |||
| US 6525497 B2, 25.02.2003 | |||
| EP 1919064 A2, 07.05.2008 | |||

