ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к управлению питанием, а в частности, к выравниванию токов между параллельными инверторами, используемыми в архитектуре с модульными преобразователями.
[002] Современные транспортные средства используют большое количество электронных средств, двигателей, нагревателей и другого оборудования с электрическим приводом. В частности, электродвигатели очень широко применяются в современных транспортных средствах, включая летательные аппараты, и приводят в движение все, начиная от гидравлических насосов до вентиляторов салона. Обычно каждый из этих электродвигателей приводится в движение независимым контроллером двигателя. Размеры каждого контроллера двигателя обеспечивают проведение максимального тока, необходимого для питания своего соответствующего двигателя при полной мощности в течение длительного периода времени (при этом контроллер двигателя, как правило, дополнительно имеет некий запас по производительности для обеспечения безопасности) без перегрева или неисправности.
[003] В результате, каждый летательный аппарат несет чрезмерное количество контроллеров двигателей, каждый из которых может иметь слишком большие размеры и недостаточно использоваться большую часть времени. Иными словами, контроллер двигателя имеет достаточную производительность для обеспечения работы двигателя при полной мощности в течение длительного периода времени плюс запас на безопасность, однако двигатели редко, если вообще когда-либо, работают с полной нагрузкой. Это происходит потому, что сами двигатели имеют некоторый встроенный запас обеспечения безопасности, и потому, что, большую часть времени двигатели работают в режиме запроса небольших ресурсов (например, вентилятор салона не всегда включен на максимальную производительность). Кроме того, некоторые двигатели используются только время от времени или во время конкретных участков полета и не используются остальное время. В результате, многие из используемых тяжелых и дорогих контроллеров двигателей летательных аппаратов большую часть своего срока службы оказываются либо незадействованными, либо работающими на уровне, значительно меньшем, чем позволяют их номинальные выходные мощности.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[004] Один пример, раскрытый в настоящем документе, представляет собой систему для выравнивания токов, содержащую множество инвертирующих усилителей мощности, каждый из которых содержится в соответствующей токовой петле и выполнен с возможностью выработки соответствующей величины тока. Система для выравнивания токов также содержит множество контроллеров инверторов, при этом каждый контроллер инвертора связан с соответствующим усилителем из указанного множества инвертирующих усилителей мощности и выполнен с возможностью приема преобразованной в системе координат указанной соответствующей величины тока. Каждый контроллер инвертора выполнен с возможностью независимого управления соответствующей величиной тока, подаваемого на нагрузку.
[005] Еще один пример, раскрытый в настоящем документе, представляет собой способ управления получением тока множеством инвертирующих усилителей мощности, управляемых множеством контроллеров инверторов. Способ включает определение множества величин тока, каждую из которых получают соответствующим усилителем из указанного множества инвертирующих усилителей мощности. Способ также включает преобразование системы координат каждой из указанного множества величин тока с получением множества преобразованных величин тока, и выработку, на основе указанного множества преобразованных величин тока, принятых указанным множеством контроллеров инверторов, команд управления вентилем для указанного множества инвертирующих усилителей мощности. Применение вырабатываемых команд управления вентилем обеспечивает регулировку по меньшей мере одной из указанного множества величин тока с уменьшением таким образом дисбаланса токов по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности.
[006] Еще один пример обеспечивает создание некратковременного компьютерочитаемого носителя, содержащего компьютерный программный код, который при исполнении в процессе работы одного или более компьютерных процессоров, реализует операцию управления получением тока множеством инвертирующих усилителей мощности, управляемых множеством контроллеров инверторов. Указанная операция включает определение множества величин тока, каждую из которых получают соответствующим усилителем из указанного множества инвертирующих усилителей мощности. Указанная операция также включает преобразование системы координат каждой из указанного множества величин тока с получением множества преобразованных величин тока, и выработку, на основе указанного множества преобразованных величин тока, принятых указанным множеством контроллеров инверторов, команд управления вентилем для указанного множества инвертирующих усилителей мощности. Применение вырабатываемых команд управления вентилем обеспечивает регулировку по меньшей мере одной из указанного множества величин тока с уменьшением таким образом дисбаланса токов по меньшей мере между двумя из указанного множества инверторов.
[007] Свойства, функции и преимущества, которые были описаны выше, могут быть получены независимо в различных примерах или могут быть скомбинированы еще в одних примерах, дальнейшие подробности которых будут раскрыты со ссылкой на сопровождающее описание и фигуры чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[008] Для того чтобы обеспечить детальное понимание признаков раскрытия настоящего изобретения, может быть приведено более подробное описание настоящего раскрытия, кратко описанного выше, посредством ссылок на примеры, некоторые из которых проиллюстрированы на прилагаемых чертежах. Следует отметить, однако, что прилагаемые чертежи иллюстрируют только типичные примеры этого раскрытия и поэтому не должны рассматриваться как ограничивающие его объем, поскольку раскрытие может допускать другие одинаково действующие примеры.
[009] На ФИГ. 1 показана система параллельных модульных преобразователей, согласно одному или более примерам, описанным в настоящем документе.
[0010] На ФИГ. 2 и 3 показаны примеры архитектур управления для уменьшения тока циркуляции между инвертирующими усилителями мощности системы модульных преобразователей, согласно одному или более примерам, описанным в настоящем документе.
[0011] На ФИГ. 4 показана система для выравнивания токов для использования в системе параллельных модульных преобразователей, согласно одному или более примерам, описанным в настоящем документе.
[0012] На ФИГ. 5 показан пример конфигурации, в которой множество инвертирующих усилителей мощности выполнены с возможностью подачи питания на общую нагрузку, согласно одному или более примерам, описанным в настоящем документе.
[0013] На ФИГ. 6 показан способ управления получением тока множеством инвертирующих усилителей мощности, управляемых множеством контроллеров инверторов, согласно одному или более примерам, описанным в настоящем документе.
[0014] Для облегчения понимания, по возможности были использованы одинаковые ссылочные номера для обозначения идентичных элементов, которые являются общими для фигур чертежей. Предполагается, что элементы, раскрытые в одном примере, могут быть использованы в других примерах без специального упоминания. Иллюстрации, приведенные в настоящем документе, не следует рассматривать как выполненные в масштабе, если иное специально не оговорено. Кроме того, фигуры чертежей зачастую выполнены упрощенными, а их подробности или компоненты опущены для ясности представления и объяснения. Чертежи и описание служат для объяснения принципов, раскрытых ниже, где одинаковые обозначения обозначают одинаковые элементы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0015] Чтобы лучше использовать функциональные возможности контроллера двигателя, система модульных преобразователей обеспечивает возможность работы с множеством модульных переназначаемых и динамически реконфигурируемых контроллеров двигателей, которые могут работать отдельно или параллельно с другими параллельными контроллерами двигателей для обеспечения необходимого управления питанием. Преобразовательная система обеспечивает подключение одного или более контроллеров, соединенных параллельно, к каждой активной электрической нагрузке в летательном аппарате по мере необходимости для удовлетворения существующей потребности в питании. Повышенное использование контроллеров двигателей может обеспечить соответствующее снижение веса и стоимости системы.
[0016] Во время работы системы модульных преобразователей, множество параллельных инверторов могут работать параллельно для питания электродвигателя или иной электрической нагрузки (иных электрических нагрузок). Однако нагружение параллельных инверторов может варьироваться вследствие производственных допусков и вариантов инверторов, а также паразитных элементов, вызванных сопротивлением проводки и индуктивностью и/или другими подключенными компонентами. В результате, приведение в действие параллельных инверторов одинаковыми приводными сигналами может вызвать неравномерное нагружение. Хотя ток от каждого из параллельных инверторов может быть выровнен с использованием индукторов на выходах, такие индукторы обычно выполнены неприемлемо большими и работают с потерями при использовании в высокомощных приложениях.
[0017] Для обеспечения выравнивания токов между параллельными первым и вторым инверторными блоками системы модульных преобразователей, система для выравнивания токов содержит множество инвертирующих усилителей мощности, каждый из которых содержится в соответствующей токовой петле и выполнен с возможностью выработки соответствующей величины тока. Система для выравнивания токов также содержит множество контроллеров инверторов, при этом каждый контроллер инвертора связан с соответствующим усилителем из указанного множества инвертирующих усилителей мощности. Каждый контроллер инвертора выполнен с возможностью приема преобразованной в системе координат величины указанной соответствующей величины тока, благодаря чему каждый контроллер инвертора выполнен с возможностью независимого управления соответствующей величиной тока, подаваемого на нагрузку.
[0018] В некоторых примерах для обеспечения выравнивания токов системный контроллер системы для выравнивания токов определяет множество величин тока, каждую из которых получают соответствующим усилителем из указанного множества инвертирующих усилителей мощности. Системный контроллер преобразует системы координат каждой из указанного множества величин тока с получением множества преобразованных величин тока, и вырабатывает, на основе указанного множества преобразованных величин тока, принятых указанным множеством контроллеров инверторов, команды управления вентилем для указанного множества инвертирующих усилителей мощности. Выработанные команды управления вентилем обеспечивают уменьшение дисбаланса токов по меньшей мере между двумя из указанного множества инверторов.
[0019] Со ссылкой на ФИГ. 1, система 100 параллельных модульных преобразователей (также упоминаемая как "система модульных преобразователей", "система преобразователей", "система") выполнена с возможностью управления системой параллельных модульных инверторов 1251, 1252, …, 125n (также упоминаемых как "инверторные модули", "инверторные блоки", "инвертирующие усилители мощности", "инверторы"; в целом инверторы 125) для приведения в действие множества и/или различных типов машин переменного (АС) или постоянного (DC) тока, таких как показанные нагрузки 140 (то есть двигатели M1, М2, …, Mj). Система 100 параллельных модульных преобразователей содержит указанное множество инверторов 125, которые подключены параллельно, каждый из которых выполнен с возможностью получения любого из множества алгоритмов 115А, 115В, 115С управления двигателем (также "алгоритмы управления", "алгоритмы"), встроенных в систему 110 управления двигателем посредством имеющей изменяемую конфигурацию сети (control switching network, CSN) 120 переключения управления. Система 110 управления двигателем может содержать одну или более схем управления двигателем, каждая из которых выполнена с возможностью работы с одной или более нагрузками (то есть двигателями) 140. Каждый из параллельных модульных инверторов 125 может быть выполнен с возможностью приведения в действие одной или более из указанного множества электрических нагрузок 140 (например, машин переменного или постоянного тока, таких как двигатели M1, M2, …, Mj), на стороне нагрузки посредством имеющей изменяемую конфигурацию сети 130 (PSN) переключения питания. В некоторых примерах на выходе каждого параллельного модульного инвертора 125 выдается однофазное питание для электрических нагрузок 140. В других примерах на выходе каждого параллельного модульного инвертора 125 выдается многофазное питание (например, трехфазный переменный ток) для электрических нагрузок 140. Например, инвертор 125 может включать в себя три фазных вывода, каждый из которых выполнен с возможностью выдачи отдельной фазы трехфазного сигнала для приведения в действие выбранных электрических нагрузок 140.
[0020] Показанные конфигурации обеспечивают, например, возможность динамического изменения конфигурации как сети 120 переключения управления, так и сети 130 переключения питания. Кроме того, любой из инверторов указанного множества инверторов 125 доступен для приведения в действие любой из электрических нагрузок 140 на стороне нагрузки и любого алгоритма управления из множества алгоритмов 115А, 115В, 115С управления, встроенных в систему 110 управления двигателем, доступных для управления любым из указанного множества инверторов 125. В результате этого, один или более инверторов 125 могут быть выполнены с возможностью приведения в действие одной нагрузки 140 так, как это необходимо, для соответствия требованиям к нагрузке, и/или для приведения в действие одновременно множества нагрузок 140, каждая из которых может быть приведена в действие с использованием одного или более инверторов 125. Кроме того, множество нагрузок 140 на стороне нагрузки могут быть приведены в действие одновременно с помощью одного и того же алгоритма (например, 115А) управления двигателем или различных алгоритмов управления двигателем (например, некоторые с помощью алгоритма 115А управления двигателем, некоторые с помощью алгоритма 115В управления двигателем).
[0021] Как показано на ФИГ. 1, система 100 параллельных модульных преобразователей содержит системный контроллер 105, выполненный с возможностью связи с контроллером 102 транспортного средства для приема рабочих команд контроллера 102 транспортного средства и для выдачи в контроллер 102 транспортного средства сигналов состояния, относящихся к работе системы 100 модульных преобразователей, и/или другой информации. В некоторых примерах системный контроллер 105 также может изменять конфигурацию сети 130 переключения питания, чтобы обеспечивать параллельное подключение подходящего количества инверторных модулей 125 для приведения в действие конкретной нагрузки 140 в реальном времени. Иными словами, при увеличении нагружения нагрузки 140 системный контроллер 105 может выдавать сигнал в сеть 130 переключения питания на подключение большего количества инверторов 125 параллельно. И наоборот, при уменьшении нагружения системный контроллер 105 может выдавать сигнал в сеть 130 переключения питания на отключение одного или более указанных инверторов 125. При необходимости системный контроллер 105 может затем подключать их параллельно с другими инверторами 125 для приведения в действие других нагрузок 140.
[0022] В некоторых примерах системный контроллер 105 также может изменять конфигурацию сети 120 переключения управления с использованием сигналов управления 122 сети (CSN) переключения управления с выдачей соответствующих алгоритмов 115А, 115В, 115С управления двигателем в качестве сигналов 117 управления двигателем в один или более указанных инверторов 125, приводящих в действие двигатели одного или более типов. Инверторы 125 также могут выдавать сигналы 127 обратной связи, такие как значения тока и/или напряжение, в систему 110 управления двигателем и выбранный алгоритм 115А, 115В, 115С управления двигателем. Некоторые неограничивающие примеры алгоритмов 115А, 115В, 115С управления двигателем, обеспечиваемые системным контроллером 105, включают в себя управление с ориентацией по полю (field-oriented control, FOC), прямое управление моментом (direct torque control, DTC) и вольт-герцовое управление (V/f). Различные алгоритмы управления двигателем могут быть использованы для эффективного приведения в действие двигателей различных типов соответствующего транспортного средства (например, асинхронные двигатели, синхронные двигатели, синхронные двигатели на постоянных магнитах, бесщеточные двигатели постоянного тока и т.д.). Например, типичный летательный аппарат может включать в себя стартерный двигатель-генератор для основных двигателей (двигатель на постоянных магнитах), вентилятор с приводом от набегающего потока (асинхронный двигатель), двигатель (двигатель на постоянных магнитах) компрессора системы управления окружающей средой (ECS) и одного или более синхронных двигателей, все из которых могут иметь разные требования к мощности.
[0023] В некоторых примерах системный контроллер 105 также может отправлять, например и без ограничения, опорные значения частоты вращения двигателя, момента или мощности в соответствующие нагрузки 140 (например, через систему 110 управления двигателем). В некоторых примерах системный контроллер 105 может храниться и запускаться на встроенном контроллере. Системный контроллер 105 может содержать, например и без ограничения, микроконтроллер, процессор, программируемую логическую матрицу типа FPGA или специализированную интегральную схему (ASIC). В некоторых примерах системный контроллер 105 может использовать имитатор/эмулятор в реальном времени или может работать в режиме реального времени.
[0024] В некоторых примерах количество алгоритмов 115А, 115В, 115С управления двигателем может быть определено количеством различных нагрузок в виде двигателя. Например, если система 100 имеет для приведения в действие три нагрузки разных типов (то есть двигателя) 140, могут быть разработаны три алгоритма 115А, 115В, 115С управления двигателем, при этом каждый алгоритм 115А, 115В, 115С управления двигателем будет специфичным для нагрузки (то есть двигателя) 140. В другом примере, если три нагрузки 140 выполняют одну и ту же функцию, возможно, что все три нагрузки могут быть запитаны с использованием одного алгоритма 115А, 115В или 115С управления двигателем.
[0025] Сеть 120 переключения управления может динамически конфигурировать один или более инверторов 125, каждый из которых может быть приведен в действие конкретным алгоритмом 115А, 115В, 115С управления или общим алгоритмом 115А, 115В, 115С управления, который направляется через сеть 120 переключения управления согласно сигналам 122 управления сети (CSN) переключения управления, выдаваемым системным контроллером 105. В некоторых примерах временная задержка между сигналами, поступающими в сети 120 переключения управления и выходящими из нее, может быть сведена к минимуму для повышения производительности двигателя.
[0026] Сеть 120 переключения управления может иметь программную или аппаратную реализацию. В некоторых примерах программно-кодированная сеть 120 переключения управления может быть запущена, например и без ограничения, на встроенном контроллере, симуляторе реального времени или компьютере. В других примерах сеть 120 переключения управления может быть реализована с использованием аппаратного устройства, такого как, например и без ограничения, сложные программируемые логические устройства (complex programmable logic device, CPLD), специализированные интегральные схемы (ASIC) или программируемые логические матрицы типа FPGA.
[0027] В некоторых примерах сеть 130 переключения питания может быть динамически сконфигурирована с использованием сигналов 132 управления сети (PSN) переключения питания от системного контроллера 105 для подключения одного или более инверторов 125 для приведения в действие одной или более нагрузок 140 в расчете на один или более конкретных алгоритмов 115А, 115В, 115С управления, поступающих из системы 110 управления двигателем. В некоторых примерах сеть 130 переключения питания может выступать в качестве устройства защиты от короткого замыкания и/или перегрузки по току. В этом случае выключатель (выключатели) питания сети 130 (PSN) переключения питания, которые связаны с имеющей короткое замыкание и/или перегрузку по току нагрузкой 140, размыкаются при обнаружении неисправности.
[0028] Сеть 130 переключения питания может быть реализована с использованием выключателей питания, некоторые неограничивающие примеры которых включают в себя твердотельные реле, механические реле, транзисторы и другие управляемые выключатели питания. Системный контроллер 105 управляет каждым выключателем питания с использованием сигналов 132 управления сети (PSN) переключения питания. Инверторы 125 преобразуют питание постоянного тока (то есть VDC на ФИГ. 1) в необходимое на выходе питание переменного тока (например, с различными уровнями напряжения, частотами, формы волны и т.д.) для приведения в действие различных машин переменного тока (например, нагрузок 140) согласно алгоритму 115А, 115В, 115С двигателя, выбранному с помощью системного контроллера 105. Инверторы 125 могут содержать, например и без ограничения, биполярные транзисторы с изолированным затвором (insulated-gate bipolar transistor, IGBT), полевые транзисторы с металлическим оксидом и полупроводником (metal-oxide-semiconductor field-effect transistor, MOSFET) и биполярные переходные транзисторы (bipolar junction transistor, BJT).
[0029] Сеть 120 переключения управления включает в себя достаточное количество управляющих переключателей, так что каждый алгоритм 115А, 115В, 115С управления двигателем может быть по выбору и динамически подключен к любому одному или более инверторам 125. Однако в других примерах некоторые комбинации инверторов 125 и алгоритмов 115А, 115В, 115С управления двигателем могут быть опущены как ненужные, что может уменьшить количество управляющих переключателей, содержащихся в сети 120 переключения управления. В некоторых случаях конкретная нагрузка в виде двигателя предпочтительно управляется посредством конкретного алгоритма 115А, 115В, 115С управления двигателем. Например, для работы асинхронного двигателя, приводящего в действие вентилятор, может быть предпочтителен алгоритм скалярного (вольт-герцового, V/f) управления, с тем чтобы уменьшить вычислительную нагрузку. Выключатели питания сети 130 (PSN) переключения питания, которые могут прокладывать маршрут для других алгоритмов 115А, 115В, 115С управления двигателем к этому двигателю, не являются необходимыми и могут быть опущены для простоты. Сеть 130 переключения питания включает в себя достаточное количество выключателей питания, так что каждый из инверторов 125 может быть по выбору и динамически подключен к любым одной или более электрическим нагрузкам 140 (то есть двигателями M1, М2, …, Mj). Схожим образом, в других примерах некоторые комбинации инверторов 125 и электрических нагрузок 140 могут быть опущены для уменьшения количества выключателей питания, содержащихся в сети 130 переключения питания. В одном неограничивающем примере система 100 включает в себя три (3) алгоритма 115А-115С управления двигателем, три (3) нагрузки 140 и пять (5) инверторов 125. В этом случае пятнадцать (15) управляющих переключателей содержатся в сети 120 переключения управления (соответствующих трем алгоритмам 115 управления двигателем и пяти инверторам 125), и пятнадцать (15) выключателей питания содержатся в сети 130 (PSN) переключения питания (соответствующих пяти инверторам 125 и трем нагрузкам 140), но приведенные количества могут изменяться в зависимости от реализации. Например, количество n параллельных инверторов 125 может быть любым подходящим числом. Следовательно, размер сети 120 переключения управления в этом примере будет (3 × n), а размер сети 130 переключения питания будет (n × 3). Схожим образом, количество нагрузок 140 может быть больше трех, например, составлять число j. Следовательно, размер сети 130 переключения питания будет (n × j).
[0030] В некоторых примерах система 100 модульных преобразователей разделена на множество каскадов. Как показано, система 100 модульных преобразователей включает в себя каскад 145 контроллеров и силовой каскад 150. Компоненты в каскаде 145 контроллеров (например, системный контроллер 105, система 110 управления двигателем) могут работать в режиме питания, отличающемся от режима питания компонентов в силовом каскаде 150. Например, каскад 145 контроллеров может быть запитан относительно низким напряжением (например, примерно от 1 вольта (В) до 20 В), которое подходит для управления каскадом 145 контроллеров компонентов, в то время как силовой каскад 150 запитан относительно высокими напряжениями (например, примерно от 100 В до 1000 В или более), подходящими для получения на выходе питания, необходимого для приведения в действие нагрузок 140. Кроме того, в некоторых примерах силовой каскад 150 выполнен с возможностью выдачи многофазного питания (например, выдачи трехфазного переменного тока) для приведения в действие нагрузок 140. В таких примерах каждое подключение между инверторами 125, сетью 130 переключения питания и нагрузками 140 может представлять собой подключение для подачи трехфазного питания. Посредством разделения компонентов системы 100 модульных преобразователей на множество каскадов устраняется необходимость задания размеров компонентов каскада 145 контроллеров, с тем чтобы обеспечить работу с высокими напряжениями и/или токами, выдаваемыми силовым каскадом 150. Благодаря этому, каскад 145 контроллеров может, в целом, содержать компоненты меньших размеров и/или работающих с меньшими потерями, что приводит к уменьшению веса и повышению эффективности системы 100 модульных преобразователей.
[0031] Управляющие сигналы и/или сигналы обратной связи, передаваемые между каскадом 145 контроллеров и силовым каскадом 150, могут пересекать изолирующий барьер, выполненный с возможностью предотвращения воздействия высоких напряжений (например, больших напряжений постоянного тока) силового каскада 150 на компоненты низкого напряжения в каскаде 145 контроллеров. Как показано, системный контроллер 105 передает управляющие сигналы 107 в систему 110 управления двигателем для выбора конкретных алгоритмов 115 управления двигателем. Система 110 управления двигателем выдает выбранный алгоритм (выбранные алгоритмы) в качестве сигналов 117 управления двигателем, которые передаются по выбранному каналу (каналам) в сети 120 переключения управления и подаются в качестве управляющих сигналов 123 на инверторы 125. Нагрузки 140 выдают один или более сигналов 142 обратной связи с двигателями в алгоритмы 115 управления двигателем для обновления управления. Некоторые неограничивающие примеры сигналов 142 обратной связи с двигателями включают значения тока, напряжения, скорости и положения.
[0032] Еще в одних примерах система 100 модульных преобразователей может назначать нагрузки 140 на основе показателя приоритета нагрузки. Иными словами, если, например, количество нагрузок 140, запрашиваемых внешними системами летательного аппарата (то есть контроллером 102 транспортного средства) больше, чем может быть обеспечено системой 100 модульных преобразователей, система 100 модульных преобразователей может назначать нагрузки посредством показателя приоритета нагрузки, причем более высокоприоритетные нагрузки 140 получают питание до нагрузок с более низким приоритетом. Если летательный аппарат (через контроллер 102 транспортного средства) подает запрос на относительно большую нагрузку, например, для опускания шасси, система 100 может временно переназначить некоторые или все инверторы 125 для питания нагрузки (нагрузок) 140, связанной (связанных) с шасси. Когда шасси выпущено и зафиксировано, система 100 модульных преобразователей, в свою очередь, может переназначить инверторы 125 на свои предыдущие нагрузки 140 (или на новые существующие нагрузки). Например, вентилятор салона может быть временно отключен для опускания шасси и снова включен, когда шасси опущено.
[0033] В некоторых случаях, например, когда имеется избыток низкоприоритетных нагрузок 140, которые в совокупности превышают номинальную мощность системы 100 модульных преобразователей, система 100 модульных преобразователей может подавать питание на некоторые или все нагрузки 140 с уменьшенными заданными значениями. Таким образом, питание подается на все нагрузки 140, которые, при этом, работают с меньшей скоростью или производительностью. Так, например, вентиляторы салона летательного аппарата, освещение и бортовая развлекательная система могут одновременно запросить мощность, превышающую номинальную мощность системы 100 модульных преобразователей. В результате, система 100 модульных преобразователей может, например, обеспечивать полную мощность для развлекательной системы, но несколько уменьшать скорость вентиляторов салона и интенсивность освещения, чтобы снизить общую потребляемую мощность.
[0034] На ФИГ. 2 и 3 показаны примеры архитектур управления для уменьшения тока циркуляции между инвертирующими усилителями мощности системы модульных преобразователей, согласно примерам, описанным в настоящем документе. В общем случае, архитектуры 200 и 300 представляют собой примерные реализации системного контроллера 105 по ФИГ. 1. В соответствии с приведенным выше раскрытию системный контроллер 105 может включать в себя дополнительные функции, такие как прием команд контроллера транспортного средства, интерпретация команд, определение нагрузок и распределение мощности, и выработку сигналов для соответствующих контроллеров двигателей. Различные логические схемы и модули, проиллюстрированные в архитектурах 200, 300, могут быть реализованы в аппаратных средствах, программном обеспечении и/или прошивках.
[0035] Архитектура 200 содержит каскад 205 общего контроллера и каскад 210 контроллеров инверторов. Каскад 205 общего контроллера содержит модуль 215 тока циркуляции, выполненный с возможностью приема величин Iabc (1, 2, …, n) тока, получаемых посредством указанного множества инвертирующих усилителей мощности. Модуль 215 тока циркуляции также выполнен с возможностью сравнения различных величин Iabc (1, 2, …, n) тока для определения наличия дисбаланса токов между инвертирующими усилителями мощности.
[0036] В модульной системе электрические характеристики некоторых инвертирующих усилителей мощности могут отличаться от электрических характеристик других инвертирующих усилителей мощности. Например, различия электрических характеристик могут возникать вследствие работы инверторного модуля с течением времени и/или замены инверторного модуля (достижение практически точного согласования может быть неосуществимым или невозможным). Различные электрические характеристики могут привести к неравномерной обработке тока инвертирующими усилителями мощности. Например, один и тот же заданный ток для первого и второго инвертирующих усилителей мощности на практике могут приводить к получению различного тока первым и вторым инвертирующими усилителями мощности. Дисбалансы токов, возникающие вследствие различных электрических свойств, могут привести к ухудшению производительности и/или повреждению инвертирующих усилителей мощности.
[0037] В некоторых примерах модуль 215 тока циркуляции также выполнен с возможностью определения наличия тока Icirculation (1, 2, …, n) циркуляции по меньшей мере между двумя инвертирующими усилителями мощности. В общем случае, ток циркуляции получают инвертирующим усилителем мощности, который вместо поступления на нагрузку (нагрузки), связанную (связанные) с инвертирующим усилителем мощности, циркулирует между одним или более другими инвертирующими усилителями мощности, выполненными параллельно. Значение мощности, соответствующее токам циркуляции, может считаться «потерянной» мощностью, поскольку она недоступна для питания соответствующей нагрузки (соответствующих нагрузок).
[0038] Таким образом, минимизация токов циркуляции в общем случае способствует эффективной работе системы модульных преобразователей. В некоторых примерах минимизация токов циркуляции может также обеспечивать уменьшение дисбаланса токов в инвертирующих усилителях мощности, потерь мощности инвертирующих усилителей мощности и/или электрических помех, создаваемых инвертирующими усилителями мощности. В некоторых примерах минимизация потерь мощности от токов циркуляции позволяет использовать инверторные модули меньшей производительности, что позволяет уменьшить размер и/или вес системы модульных преобразователей.
[0039] Каскад 205 общего контроллера также включает в себя модуль 220 тока нулевой последовательности, выполненный с возможностью расчета значений токов нулевой последовательности, которые показаны как Idq_0, но альтернативно могут быть представлены как Id_0 и Iq_0. Каскад 205 общего контроллера также включает в себя модуль 225 применения команд управления, выполненный с возможностью определения на основе величин Iabc (1, 2, …, n) тока наличия каких-либо дисбалансов токов в системе модульных преобразователей, и выработки разрешающих сигналов (включ.) 230 (1, 2, …, n) для задействования управления смещением выбранных инвертирующих усилителей мощности с использованием контроллеров 270(1)-270(n) инверторов.
[0040] Каскад 205 общего контроллера также выполнен с возможностью приема в суммирующем блоке 242 команды 235, задающей частоту вращения, а также измеренной частоты 240 вращения двигателя. Разность между командой 235, задающей частоту вращения, и частотой 240 вращения двигателя является входным сигналом в пропорционально-интегральный (ПИ) блок 245, который выдает величину Iq_system общего тока системы для выполнения команды 235, задающей частоту вращения. Хотя команда 235, задающая частоту вращения, и частота 240 вращения двигателя относятся к частоте вращения двигателя, альтернативные примеры могут включать любые другие подходящие рабочие параметры и/или управляющие сигналы, относящиеся к другим типам нагрузок. Кроме того, альтернативные примеры могут включать контроллеры обратной связи отличающихся типов, такие как пропорционально-интегрально-дифференцирующий (ПИД) блок.
[0041] Каскад 205 общего контроллера также выполнен с возможностью приема тока Iabc_motor двигателя и измеренного положения 250 ротора в модуле (abc-dq0) 255 преобразования системы координат. Ток Iabc_motor двигателя в целом представляет собой статорный ток управляемого двигателя и содержит сумму токов от параллельных инвертирующих усилителей мощности (некоторых или всех Iabc (1, 2, …, n)). Модуль (abc-dq0) 255 преобразования системы координат выполнен с возможностью определения величин Idq тока, которые альтернативно могут быть представлены как Id and Iq. В рамках архитектуры 200 модуль 255 преобразования системы координат включен на общем уровне, а полученные величины Idq тока на системном уровне являются входными сигналами в каждый из контроллеров 270(1)-270(n) инверторов.
[0042] В пределах каскада 210 контроллеров инверторов каждый из множества контроллеров 270(1), …, 270(n) инверторов выполнен с возможностью приема тока Icirculation (1, 2, …, n) циркуляции, величин Idq тока, напряжения VDC, подаваемого на соответствующий инверторный модуль для питания нагрузки, и положения 250 ротора. Контроллеры 270(1)-270(n) инверторов выполнены с возможностью выработки команд 275(1)-275(n) управления вентилем для управления переключением соответствующих инверторных модулей. В некоторых примерах команды 275(1)-275(n) управления вентилем представляют собой широтномодулированные (ШИМ) сигналы для переключающих элементов соответствующего инвертирующего усилителя мощности. Например, каждый инвертирующий усилитель может содержать шесть транзисторов для выработки трехфазного питания, и в этом случае каждая команда 275(1), …, 275(n) управления вентилем содержит шесть сигналов для приведения в действие затворов указанных шести транзисторов.
[0043] Как показано, каскад 210 контроллеров инверторов также включает в себя блоки 260A-260D умножения и суммирующие блоки 265A-265D. Каждый контроллер 270(1), …, 270(n) инверторов также выполнен с возможностью приема сигналов, содержащих команды Iq_command и Iq_command управления током. В некоторых примерах величина Iq_system общего тока системы является входным сигналом в каждый из контроллеров 270(1), …, 270(n) инверторов в качестве команды Iq_command управления током. В общем случае, значения Iq_command могут изменяться на основе типа приводимой в действие нагрузки.
[0044] Пример работы каскада 210 контроллеров инвертеров будет описан со ссылкой на контроллер 270(1) инверторов, и специалисту в данной области техники будет понятно, что эти принципы могут быть схожим образом применены к другим контроллерам 270 инверторов. Когда модуль 225 применения команд управления определяет отсутствие дисбалансов токов в системе модульных преобразователей, или по меньшей мере отсутствие необходимости управления смещением для контроллера 270(1) инверторов, значение разрешающего сигнала 230(1) может быть установлено на логический ноль. В результате этого, выходные сигналы каждого блока 260А, 260В умножения равны нулю. В свою очередь, суммирующие блоки 265А, 265В соответственно выдают значения Iq_command и Iq_command в контроллер 270(1) инверторов. Однако, когда разрешающий сигнал 230(1) установлен на логическую единицу, что означает необходимость управления смещением для контроллера 270(1) инверторов, в суммирующем блоке 265А выполняют сложение значения Iq_0 с Iq_command, а в суммирующем блоке 265В выполняют сложение Id_0 с Iq_command. Выходной сигнал из суммирующих блоков 265А, 265В является входным сигналом для контроллера 270(1) инверторов, который затем адаптирует команды 275(1) управления вентилем таким образом, чтобы уменьшить дисбаланс токов.
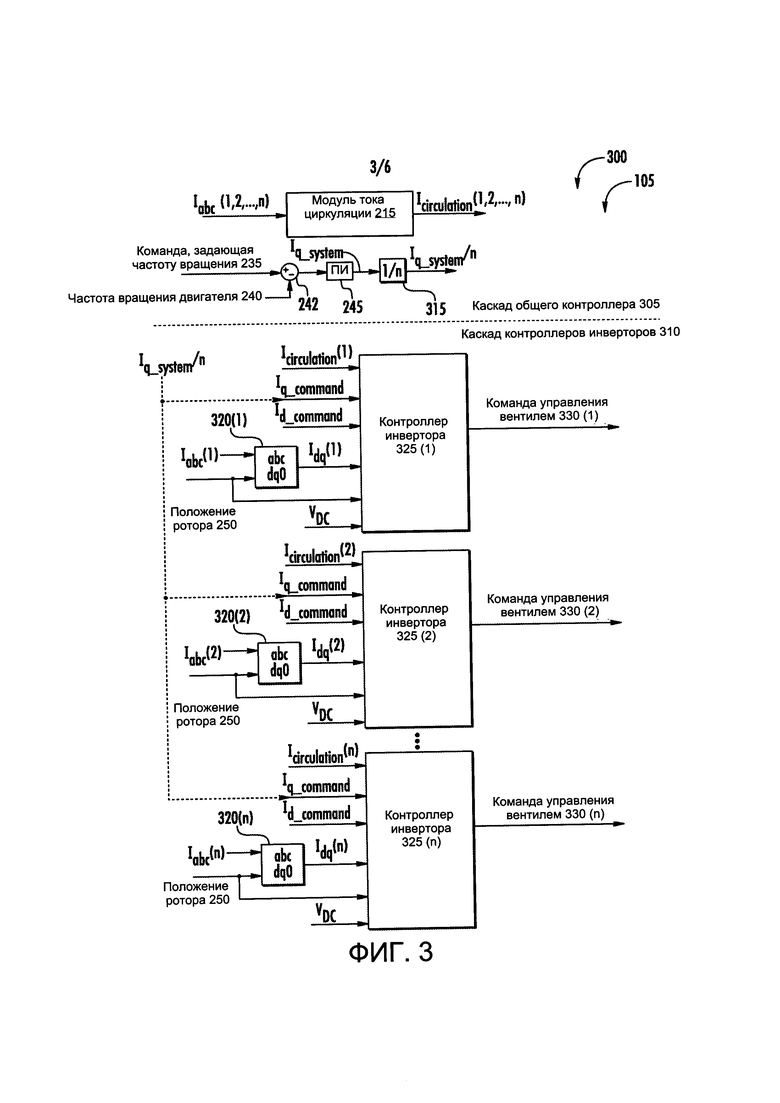
[0045] На ФИГ. 3 показана архитектура 300, представляющая еще один пример реализации системного контроллера 105. За исключением явно оговоренных случаев, предполагается, что элементы, общие с архитектурой 200, работают схожим образом.
[0046] Архитектура 300 содержит каскад 305 общего контроллера и каскад 310 контроллеров инверторов. Каскад 305 общего контроллера содержит модуль 215 тока циркуляции, выполненный с возможностью для определения наличия тока Icirculation (1, 2. …, n) циркуляции по меньшей мере между двумя инвертирующими усилителями мощности. Величину Iq_system общего тока системы продолжают обрабатывать в каскаде 305 общего контроллера, посредством блока 315 деления, который выполнен с возможностью равномерного распределения частей величины Iq_system общего тока системы среди выбранных контроллеров 325(1)-325(n) инверторов. Как показано, блок 315 деления выполнен с возможностью деления величины Iq_system общего тока системы на количество n контроллеров 325(1)-325(n) инверторов, с распределением значения (Iq_system/n) для каждого из контроллеров 325(1)-325(n) инверторов. В других примерах делитель блока 315 деления может отличаться от n, например, быть другим целым числом, представляющим выбранное подмножество n контроллеров 325(1)-325(n) инверторов.
[0047] В пределах каскада 310 контроллеров инвертеров каждый из множества контроллеров 325(1), …, 325(n) инверторов выполнен с возможностью приема тока Icirculation (1, 2, …, n) циркуляции, напряжения VDC, подаваемого на соответствующий инверторный модуль для питания нагрузки, и положения 250 ротора. Как раскрыто выше, контроллеры 325(1), …, 325(n) инверторов выполнены с возможностью приема соответствующих значений Iq_command, которые в некоторых случаях могут составлять (Iq_system/n) или другие подходящие значения, для равномерного распределения величины Iq_system общего тока системы. Контроллеры 325(1)-325(n) инверторов выполнены с возможностью выработки команд 330(1)-330(n) управления вентилем для управления переключением соответствующих инверторных модулей. В некоторых примерах команды 330(1)-330(n) управления вентилем представляют собой широтномодулированные (ШИМ) сигналы для переключающих элементов соответствующих инвертирующему усилителю мощности.
[0048] Каскад 310 контроллеров инвертеров также включает в себя множество модулей (abc-dq0) 320(1), 320(2), …, 320(n) преобразования системы координат. Каждый модуль 320(1), 320(2), …, 320(n) преобразования системы координат выполнен с возможностью приема соответствующей величины Iabc (1, 2, …, n) тока и положения 250 ротора и определения соответствующих величин Idq (1), Idq (2), …, Idq (n) тока. Каждая величина Idq (1), Idq (2), …, Idq (n) тока является входным сигналом в соответствующий контроллер 325(1), 325(2), …, 325(n) инверторов.
[0049] Пример, показанный в архитектуре 300, обеспечивает несколько преимуществ по сравнению с архитектурой 200. Архитектура 300 не требует выполнения расчета тока нулевой последовательности (то есть модуля 220 тока нулевой последовательности) или дополнительной логической схемы применения команд управления для определения необходимости задействования управления смещением для инвертирующих усилителей мощности. Уменьшение величины тока нулевой последовательности обеспечивает преимущество, заключающееся в повышении эффективности работы системы модульных преобразователей, поскольку на подключенную нагрузку может быть подан больший ток, вырабатываемый инвертирующими усилителями мощности.
[0050] Кроме того, посредством использования одного модуля 320(1), 320(2), …, 320(n) преобразования системы координат для каждого инвертирующего усилителя мощности, в архитектуре 300 обеспечено образование одной токовой петли для каждого инвертирующего усилителя мощности. Обеспечение отдельных токовых петель для каждого инвертирующего усилителя мощности обеспечивает для соответствующего контроллера 325(1), 325(2), …, 325(n) инверторов возможность независимого управления величиной тока, подаваемого на конкретную нагрузку. Благодаря независимому управлению каждый контроллер 325(1), 325(2), …, 325(n) инверторов выполнен с возможностью уменьшения дисбалансов токов соответствующего инвертирующего усилителя мощности, а также уменьшения серьезности ошибок управления током, что позволяет избежать ухудшения характеристик инвертирующего усилителя мощности и/или его повреждения.
[0051] В некоторых примерах независимое управление каждым инвертирующим усилителем мощности обеспечивает возможность продолжения нормальной работы системы модульных преобразователей, несмотря на множество инвертирующих усилителей мощности, имеющих различные дисбалансы токов. Дисбалансы токов, существующие между указанным множеством инвертирующих усилителей мощности, могут возникать вследствие изменений при производстве инвертирующих усилителей мощности, например, обусловливающих различие импедансов инвертирующих усилителей мощности. В некоторых примерах инвертирующие усилители мощности системы модульных преобразователей могут быть выбраны из различных партий компонентов, или один или более инвертирующих усилителей мощности могут быть заменены. Инвертирующие усилители мощности могут иметь любые подходящие параметры для описания дисбаланса токов, такие как параметр усиления (например, представляющий масштабирование сигнала тока) и/или параметр смещения (например, представляющий смещение сигнала тока). При рассогласовании импедансов инвертирующих усилителей мощности получаемый дисбаланс токов может обусловливать создание определенным инвертирующим усилителем (определенными инвертирующими усилителями) мощности токов относительно больших значений, которые могут привести к повреждению инвертирующего усилителя (инвертирующих усилителей) мощности или постоянному срабатыванию токовой защиты инвертирующего усилителя (инвертирующих усилителей) мощности.
[0052] На ФИГ. 4 показана система выравнивания токов для использования в системе параллельных модульных преобразователей, согласно примерам, описанным в настоящем документе. Система 400 для выравнивания токов представляет собой один из возможных вариантов реализации каскада 310 контроллеров инвертеров согласно топологии 300 и иллюстрирует независимое управление одним инвертирующим усилителем 125k мощности с использованием одного контроллера 325(k) инверторов. Различные логические схемы и модули, проиллюстрированные в системе 400 для выравнивания, могут быть реализованы в аппаратных средствах, прошивках и/или программном обеспечении.
[0053] Напряжение VDC постоянного тока подается через входной фильтр 404 электромагнитных помех для питания инвертирующего усилителя 125k мощности. Датчик 402 напряжения выдает значение VDC в модуль 420 аналого-цифровых преобразователей (ADC), и затем значение VDC вводится в контроллер 325(k) инверторов.
[0054] На основе команд 330(k) управления вентилем драйвер 415 управления затвором управляет переключателями инвертирующего усилителя 125(k) мощности для получения величины Iabc (k) тока, который фильтруют на выходном фильтре 406 электромагнитных помех и направляют через сеть 130 переключения питания на конкретную нагрузку, такую как двигатель Mk. Датчик 408 тока выдает величину Iabc (k) в модуль 424 АЦП, которая затем вводится в контроллер 325(k) инверторов. Датчик 410 положения выдает величину положения ротора в модуль 426 кодового датчика, которое затем вводится в контроллер 325(k) инверторов в качестве положения 250 ротора.
[0055] Величина Iabc (k) тока и положение 250 ротора являются входными сигналами для модулей (abc-dq0) 320(k) преобразования системы координат, которые вырабатывают значения Iq (k) и Id (k). Суммирующий блок 430А, используемый в контроллере 325(k) инвертора, сравнивает Iq (k) с заданным током Iq_command и выдает разность через ПИ-блок 435А. Суммирующий блок 430В сравнивает Id (k) с заданным током Iq_command и выдает разность через ПИ-блок 435В. Блок 440 насыщения выполнен с возможностью ограничения выходного сигнала в пределах ±VDC и вырабатывает величины iq и id тока.
[0056] Величины iq, id тока и положение 250 ротора являются входными сигналами для модулей (dq0-abc) 442 преобразования системы координат, которые выдают значения iabc тока. Значения iabc складывают с током Icirculation (k) циркуляции в суммирующем блоке 444, выходной сигнал которого подается в блок 446 умножения. Выходной сигнал суммирующего блока 444 делят на напряжение VDC постоянного тока и подают в модуль 448 формирования ШИМ, который вырабатывает команды 330(k) управления вентилем для драйвера 415 управления затвором. Таким образом, система 400 для выравнивания токов образует токовую петлю 422(k) для инвертора 125k.
[0057] В одном иллюстративном примере системный контроллер вырабатывает первоначальные команды управления током (например, Iq_command и/или Iq_command) таким образом, что величина общего тока системы равномерно распределена среди указанного множества инвертирующих усилителей мощности. Например, команда Iq_command управления током может быть разделена на количество n инвертирующих усилителей мощности, а значение (Iq_command/n) подано на каждый контроллер 325(k) инверторов. После выработки соответствующих команд 330(k) управления вентилем и их применения к инвертирующему усилителю 125k мощности для драйвера 415 управления затвором, системный контроллер в ответ на это определяет величину Iabc(k) тока, вырабатываемого инвертирующим усилителем 125k мощности. При определении дисбаланса токов по меньшей мере для одного инвертирующего усилителя 125k мощности системы модульных преобразователей, например, вызванного током Icirculation (k) циркуляции, контроллер 325(k) инверторов адаптирует последующие команды 330(k) управления вентилем так, чтобы уменьшить дисбаланс токов.
[0058] На ФИГ. 5 показан пример конфигурации, в которой множество инвертирующих усилителей мощности выполнено с возможностью подачи питания на общую нагрузку, согласно примерам, описанным в настоящем документе. Топология 500 в общем случае иллюстрирует пример конфигурации системы 100 модульных преобразователей по ФИГ. 1. В топологии 500 каждый инвертирующий усилитель 1251, 1252, …, 125n мощности вырабатывает соответствующую величину Iabc(1), Iabc(2), …, Iabc(n) тока, которая является входным сигналом для сети 130 (PSN) переключения питания. На основе сигналов 132 управления сети (PSN) переключения питания, инвертирующие усилители 1251, 1252 мощности подключаются к общей нагрузке 505 (то есть, двигателю M1), которая принимает сумму величин Iabc (1), Iabc (2) тока. Вторая нагрузка 510 (то есть, двигатель Mj) подключается к инвертирующему усилителю 125n мощности и принимает величину Iabc (n) тока. Для простоты описания, другие инвертирующие усилители мощности и нагрузки не показаны.
[0059] На ФИГ. 6 показан способ управления получением тока множеством инвертирующих усилителей мощности, управляемых множеством контроллеров инверторов, согласно примерам, описанным в настоящем документе. Способ 600 в общем случае реализуют системным контроллером, связанным с системой модульных преобразователей, таким как в соответствии с архитектурой 300, показанной на ФИГ. 3.
[0060] Способ 600 начинают в необязательном блоке 605, в котором системный контроллер определяет величину общего тока системы для достижения заданной частоты вращения двигателя. В альтернативном примере нагрузка может быть другого типа, а не двигателем, и системный контроллер определяет величину общего тока системы на основе соответствия любым другим подходящим рабочим параметрам и/или управляющим сигналам.
[0061] В необязательном блоке 610 системный контроллер вырабатывает первоначальные команды управления током для распределения величины общего тока системы равномерно среди указанного множества инвертирующих усилителей мощности. В одном примере величину общего тока системы делят на количество инвертирующих усилителей мощности, выполненных параллельно конкретной нагрузке, которых в некоторых случаях может быть меньше, чем общее количество инвертирующих усилителей мощности, содержащихся в системе модульных преобразователей. В блоке 615 системный контроллер определяет множество величин тока, каждую из которых вырабатывают соответствующим усилителем из указанного множества инвертирующих усилителей мощности.
[0062] В необязательном блоке 620 системный контроллер сравнивает, в ответ на выработку первоначальных команд управления током, соответствующую величину тока каждого из указанного множества инвертирующих усилителей мощности. В необязательном блоке 625 системный контроллер определяет дисбаланс токов на основе проведенного сравнения.
[0063] В блоке 630 системный контроллер преобразует систему координат каждой из указанного множества величин тока с получением множества преобразованных величин тока. В одном примере преобразование координат выполняют для каждого инвертирующего усилителя мощности, и оно включено в отдельную токовую петлю каждого инвертирующего усилителя мощности. Отдельные токовые петли обеспечивают для соответствующего контроллера инвертора возможность независимого управления величиной тока, подаваемого на конкретную нагрузку. Благодаря независимому управлению каждый контроллер инвертора системного контроллера выполнен с возможностью уменьшения дисбалансов токов соответствующего инвертирующего усилителя мощности, а также уменьшения серьезности ошибок управления током, что позволяет избежать ухудшения характеристик инвертирующего усилителя мощности и/или его повреждения.
[0064] В блоке 635 системный контроллер вырабатывает, на основе указанного множества преобразованных величин тока, принятых указанным множеством контроллеров инверторов, команды управления вентилем для указанного множества инвертирующих усилителей мощности. В блоке 640 системный контроллер обеспечивает, с использованием вырабатываемых команд управления вентилем, принятых указанным множеством инвертирующих усилителей мощности, подачу питания от указанного множества инвертирующих усилителей мощности на общую нагрузку. Способ 600 заканчивают после завершения блока 640.
[0065] Описание различных примеров реализации настоящего изобретения было представлено в целях иллюстрации и не претендует на исчерпывающий характер или не ограничивается раскрытыми примерами. Многие возможные модификации и варианты будут очевидны специалистам в данной области техники без отступления от объема и идей описанных примеров. Терминология, использованная в настоящем документе, была выбрана, чтобы наилучшим образом объяснить принципы приведенных примеров, практическое применение или техническое усовершенствование по сравнению с существующими технологиями или дать возможность другим специалистам в этой области техники понять примеры, раскрытые в настоящем документе.
[0066] Как будет понятно специалисту в данной области техники, аспекты раскрытия настоящего изобретения могут быть реализованы в качестве системы, способа или компьютерного программного продукта. Соответственно, аспекты раскрытия настоящего изобретения могут быть представлены в виде полностью аппаратного примера, полностью программного примера (в том числе прошивки, резидентного программного обеспечения, микрокода и т.д.) или примера, объединяющего программные и аппаратные аспекты, которые в целом могут в общем случае быть упомянуты в настоящем документе как "схема", "модуль" или "система". Кроме того, аспекты раскрытия настоящего изобретения могут быть представлены в виде компьютерного программного продукта, реализованного в одном или более компьютерочитаемых носителях с реализованным на них компьютерочитаемым программным кодом.
[0067] Может быть использована любая комбинация одного или более компьютерочитаемых носителей. Компьютерочитаемый носитель может быть компьютерочитаемым носителем сигналов или компьютерочитаемым носителем для хранения. Компьютерочитаемый носитель для хранения может представлять собой, например, но без ограничения, электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, устройство или прибор или любую подходящую комбинацию из вышеперечисленного. Более конкретные примеры (неисчерпывающий перечень) компьютерочитаемого носителя для хранения могут включать в себя: электрическое подключенение, имеющее один или более проводов, портативную компьютерную дискету, жесткий диск, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM или флеш-память), оптическое волокно, портативный компакт-диск только для чтения (CD-ROM), оптическое устройство для хранения, магнитное устройство для хранения или любое подходящее сочетание из вышеперечисленного. В контексте данного документа компьютерочитаемый носитель для хранения может представлять собой любой материальный носитель, который может содержать или сохранять программу для использования системой, устройством или прибором исполнения инструкций или в связи с системой, устройством или прибором исполнения инструкций.
[0068] Компьютерочитаемый носитель сигналов может включать в себя распространяемый сигнал данных с компьютерочитаемым программным кодом, встроенным в него, например, в полосе частот или в качестве части несущей волны. Такой распространяемый сигнал может принимать любую из различных форм, включающую, но без ограничения, электрическую, электромагнитную, магнитную, оптическую или любую подходящую их комбинацию. Компьютерочитаемый носитель сигналов может представлять собой любой компьютерочитаемый носитель, который не является компьютерочитаемым носителем для хранения и который может передавать, распространять или перемещать программу для использования системой, устройством или прибором исполнения инструкций или в связи с системой, устройством или прибором исполнения инструкций.
[0069] Программный код, реализованный на компьютерочитаемом носителе сигнала, может быть передан с использованием подходящего носителя, включая, но без ограничения, проводной и беспроводной, волоконно-оптический кабель, радиочастоты (RF) или тому подобное или любое подходящее сочетание из вышеперечисленного.
[0070] Компьютерный программный код для осуществления операций согласно аспектам настоящего изобретения может быть написан с помощью сочетания одного или большего количества языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, С++ или т.п., и обычные процедурные языки программирования, такие как язык программирования "С" или подобные языки программирования. Программный код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии, удаленный компьютер может быть соединен с компьютером пользователя посредством сети любого типа, включающей локальную сеть (LAN) или глобальную сеть (WAN), или может быть установлена связь с внешним компьютером (например, посредством сети Интернет с помощью интернет-провайдера).
[0071] Аспекты раскрытия настоящего изобретения описаны выше со ссылкой на показанные блок-схемы и/или структурные схемы способов, устройств (систем) и компьютерных программных продуктов согласно примерам раскрытия настоящего изобретения. Следует понимать, что каждый блок показанных блок-схем и/или структурных схем, а также комбинации блоков показанных блок-схем и/или структурных схем, могут быть реализованы инструкциями компьютерных программ. Эти инструкции компьютерных программ могут быть поданы на процессор компьютера общего назначения, компьютера специального назначения или иного программируемого устройства обработки данных для получения такой машины, что инструкции, при их исполнении процессором компьютера или иного программируемого устройства обработки данных, создают средства для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или структурной схемы.
[0072] Эти инструкции компьютерных программ также могут быть сохранены на компьютерочитаемом носителе, выполненном с возможностью управления компьютером, иным программируемым устройством обработки данных или иными устройствами для обеспечения работы конкретным образом так, что инструкции, сохраненные на компьютерочитаемом носителе, обеспечивают получение изделия, включающего инструкции, которые реализуют функции/действия, указанные в блоке или блоках блок-схемы и/или структурной схемы.
[0073] Инструкции компьютерных программ также могут быть загружены на компьютер, иное программируемое устройство обработки данных или иные устройства, чтобы вызывать последовательное выполнение рабочих операций на компьютере, ином программируемом устройстве обработки данных или иных устройствах для получения реализуемых на компьютере процессов таким образом, что инструкции, исполняемые на компьютере или другом программируемом устройстве, обеспечивают процессы для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или структурной схемы.
[0074] Представленные на фигурах чертежей блок-схемы и структурные блок-схемы иллюстрируют архитектуру, функциональность и работу возможных вариантов осуществления систем, способов и компьютерных программных продуктов согласно различным вариантам раскрытия настоящего изобретения. В этой связи каждый блок в блок-схеме или структурных блок-схемах может представлять модуль, сегмент или часть инструкций, который или которая содержит одну или более инструкций, подлежащих выполнению, для реализации конкретной логической функции (функций). В некоторых альтернативных вариантах осуществления функции, представленные в блоке, могут быть реализованы вне порядка, показанного на фигурах чертежей. Например, два блока, показанных последовательно, в действительности могут быть выполнены по существу одновременно, или указанные блоки могут быть выполнены в обратном порядке, в зависимости от задействованной функциональности. Следует также отметить, что каждый блок показанных структурных схем и/или блок-схем и комбинации блоков в показанных структурных блок-схемах и/или блок-схемах, может быть реализован с помощью систем на основе специализированных аппаратных средств, которые реализуют конкретные функции или действия или реализуют комбинации специализированных аппаратных средств и компьютерных инструкций.
Кроме того, раскрытие настоящего изобретения содержит варианты реализации согласно следующим пунктам:
Пункт 1. Система (100, 400) для выравнивания токов, содержащая:
множество инвертирующих усилителей (1251, 1252, …, 125n) мощности, каждый из которых содержится в соответствующей токовой петле (422(k)) и выполнен с возможностью выработки соответствующей величины (Iabc(k)) тока; и
множество контроллеров (325(1), 325(2), …, 325(n)) инверторов, при этом каждый контроллер (325(k)) инвертора связан с соответствующим инвертирующим усилителем мощности из указанного множества инвертирующих усилителей мощности и выполнен с возможностью приема преобразованной в системе координат величины (Id (k), Iq (k)) указанной соответствующей величины тока, благодаря чему каждый контроллер инвертора выполнен с возможностью независимого управления соответствующей величиной тока, подаваемого на нагрузку (140).
Пункт 2. Система по пункту 1, в которой по меньшей мере первый инвертирующий усилитель мощности из указанного множества инвертирующих усилителей мощности имеет электрические характеристики, отличающиеся от электрических характеристик по меньшей мере второго инвертирующего усилителя мощности из указанного множества инвертирующих усилителей мощности, причем
одно и то же заданное значение (Iq_command) тока, подаваемое на первый инвертирующий усилитель мощности и на второй инвертирующий усилитель мощности приводит к неравномерной обработке тока среди указанного множества инвертирующих усилителей мощности.
Пункт 3. Система по пункту 1, в которой независимое управление соответствующей величиной тока, подаваемого на нагрузку, обеспечивает уменьшение:
дисбаланса токов в указанном множестве инвертирующих усилителей мощности;
потерь мощности указанного множества инвертирующих усилителей мощности;
тока циркуляции по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности и/или
электрических помех, создаваемых указанным множеством инвертирующих усилителей мощности.
Пункт 4. Система по пункту 1, в которой по меньшей мере два из указанного множества инвертирующих усилителей мощности выполнены с возможностью подачи питания на общую нагрузку (505).
Пункт 5. Система по пункту 4, в которой общая нагрузка содержит двигатель (M1, М2, …, Mj).
Пункт 6. Система по пункту 1, в которой указанное множество контроллеров инверторов содержится в системном контроллере (105), причем
системный контроллер также содержит каскад (305) общего контроллера, выполненный с возможностью:
определения (605) величины (Iq_system) общего тока системы для достижения заданной частоты (235) вращения двигателя и
выработки (610) команд (Iq_command) управления током для распределения величины общего тока системы равномерно (Iq_system/n) среди указанного множества инвертирующих усилителей мощности.
Пункт 7. Система по пункту 6, в которой каскад общего контроллера также содержит модуль (215) тока циркуляции, выполненный с возможностью:
сравнения (620), в ответ на выработку команд управления током, величин тока, соответствующих каждому из указанного множества инвертирующих усилителей мощности; и
определения (625), на основе проведенного сравнения, тока (Icirculation(1), Icirculation(2), Icirculation(n)), циркуляции, существующего по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности,
причем указанное множество контроллеров инверторов также выполнены с возможностью регулировки соответствующей величины тока, подаваемого на нагрузку, на основе определенного тока циркуляции.
Пункт 8. Способ (600) управления получением тока множеством инвертирующих усилителей (1251, 1252, …, 125n) мощности, управляемых множеством контроллеров (325(1), 325(2), …, 325(n)) инверторов, включающий:
определение (615) множества величин (Iabc(1), Iabc(2), …, Iabc(n)) тока, каждую из которых получают соответствующим инвертирующим усилителем мощности из указанного множества инвертирующих усилителей мощности;
преобразование (630) системы координат каждой из указанного множества величин тока с получением множества преобразованных величин (Idq(1), Idq(2), …, Idq(n)) тока и
выработку (635), на основе указанного множества преобразованных величин тока, принятых указанным множеством контроллеров инверторов, команд (330(1), 330(2), …, 330(n)) управления вентилем для указанного множества инвертирующих усилителей мощности,
причем применение вырабатываемых команд управления вентилем обеспечивает регулировку по меньшей мере одной из указанного множества величин тока с уменьшением таким образом дисбаланса токов по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности.
Пункт 9. Способ по пункту 8, согласно которому применение вырабатываемых команд управления вентилем также обеспечивает уменьшение:
потерь мощности указанного множества инвертирующих усилителей мощности;
ток циркуляции по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности и/или
электрических помех, создаваемых указанным множеством инвертирующих усилителей мощности.
Пункт 10. Способ по пункту 8, согласно которому по меньшей мере первый инвертирующий усилитель мощности из указанного множества инвертирующих усилителей мощности имеет электрические характеристики, отличающиеся от электрических характеристик по меньшей мере второго инвертирующего усилителя мощности из указанного множества инвертирующих усилителей мощности, причем
одно и то же заданное значение (Iq_command) тока, подаваемое на первый инвертирующий усилитель мощности и на второй инвертирующий усилитель мощности, приводит к неравномерной обработке тока среди указанного множества инвертирующих усилителей мощности.
Пункт 11. Способ по пункту 8, также включающий:
определение (605) величины (Iq_system) общего тока системы для достижения заданной частоты (235) вращения двигателя; и
выработку (610) первоначальных команд (Iq_command) управления током для распределения величины общего тока системы равномерно (Iq_system/n) среди указанного множества инвертирующих усилителей мощности с использованием множества первоначальных команд управления вентилем,
причем определение указанного множества величин тока выполняют в ответ на применение первоначальных команд управления вентилем.
Пункт 12. Способ по пункту 11, также включающий:
сравнение (620), в ответ на применение первоначальных команд управления вентилем, соответствующей величины тока, получаемого каждым из указанного множества инвертирующих усилителей мощности; и
определение (625) наличия дисбаланса токов на основе проведенного сравнения.
Пункт 13. Способ по пункту 8, также включающий:
обеспечение (640), с использованием вырабатываемых команд управления вентилем, принятых указанным множеством инвертирующих усилителей мощности, подачи питания от указанного множества инвертирующих усилителей мощности на общую нагрузку (505).
Пункт 14. Способ по пункту 13, согласно которому общая нагрузка содержит двигатель (M1, M2, …, Mj).
Пункт 15. Некратковременный компьютерочитаемый носитель, содержащий компьютерный программный код, который при исполнении в процессе работы одного или более компьютерных процессоров, реализует операцию (600) управления получением тока множеством инвертирующих усилителей (1251, 1252, …, 125n) мощности, управляемых множеством контроллеров (325(1), 325(2), …, 325(n)) инверторов, при этом указанная операция включает:
определение (615) множества величин (Iabc(1), Iabc(2), …, Iabc(n)) тока, каждая из которых получена соответствующим инвертирующим усилителем мощности из указанного множества инвертирующих усилителей мощности;
преобразование (630) системы координат каждой из указанного множества величин тока с получением множества преобразованных величин (Idq(1), Idq(2), …, Idq(n)) тока и
выработку (635), на основе указанного множества преобразованных величин тока, принятых указанным множеством контроллеров инверторов, команд (330(1), 330(2), …, 330(n)) управления вентилем для указанного множества инвертирующих усилителей мощности,
причем применение вырабатываемых команд управления вентилем обеспечивает регулировку по меньшей мере одной из указанного множества величин тока с уменьшением таким образом дисбаланса токов по меньшей мере между двумя из указанного множества инверторов.
Пункт 16. Компьютерочитаемый носитель по пункту 15, причем применение вырабатываемых команд управления вентилем также обеспечивает уменьшение:
потерь мощности указанного множества инвертирующих усилителей мощности;
тока циркуляции по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности и/или
электрических помех, создаваемых указанным множеством инвертирующих усилителей мощности.
Пункт 17. Компьютерочитаемый носитель по пункту 15, причем указанная операция также включает:
определение (605) величины (Iq_system) общего тока системы для достижения заданной частоты (235) вращения двигателя и
выработку (610) первоначальных команд (Iq_command) управления током для распределения величины общего тока системы равномерно (Iq_system/n) среди указанного множества инвертирующих усилителей мощности с использованием множества первоначальных команд управления вентилем,
причем определение указанного множества величин тока обеспечено в ответ на применение первоначальных команд управления вентилем.
Пункт 18. Компьютерочитаемый носитель по пункту 17, причем указанная операция также включает:
сравнение (620), в ответ на применение первоначальных команд управления вентилем, соответствующей величины тока, получаемого каждым из указанного множества инвертирующих усилителей мощности; и
определение (625) наличия дисбаланса токов на основе проведенного сравнения.
Пункт 19. Компьютерочитаемый носитель по пункту 15, причем указанная операция также включает:
обеспечение (640), с использованием вырабатываемых команд управления вентилем, принятых указанным множеством инвертирующих усилителей мощности, подачи питания от указанного множества инвертирующих усилителей мощности на общую нагрузку (505).
Пункт 20. Компьютерочитаемый носитель по пункту 19, причем общая нагрузка содержит двигатель (M1, M2, …, Mj).
Хотя вышеизложенное направлено на примеры раскрытия настоящего изобретения, могут быть разработаны другие дополнительные примеры изобретения без отхода от его основного объема, который определен формулой изобретения, представленной ниже.





Изобретение относится к управлению питанием, а в частности к выравниванию токов между параллельными инверторами, используемыми в архитектуре с модульными преобразователями. Сущность: система для выравнивания токов содержит множество инвертирующих усилителей мощности, каждый из которых содержится в соответствующей токовой петле и выполнен с возможностью выработки соответствующей величины тока, множество контроллеров инверторов. Каждый контроллер инвертора связан с соответствующим усилителем из указанного множества инвертирующих усилителей мощности и выполнен с возможностью приема преобразованной в системе координат величины указанной соответствующей величины тока. Каждый контроллер инвертора выполнен с возможностью независимого управления соответствующей величиной тока, подаваемого на нагрузку. 3 н. и 17 з.п. ф-лы, 6 ил.
1. Система (100, 400) для выравнивания токов, содержащая:
множество инвертирующих усилителей (1251, 1252, …, 125n) мощности, каждый из которых содержится в соответствующей токовой петле (422(k)) и выполнен с возможностью выработки соответствующей величины (Iabc(k)) тока; и
множество контроллеров (325(1), 325(2), …, 325(n)) инверторов, при этом каждый контроллер (325(k)) инвертора связан с соответствующим инвертирующим усилителем мощности из указанного множества инвертирующих усилителей мощности и выполнен с возможностью приема преобразованной в системе координат величины (Id (k), Iq (к)) указанной соответствующей величины тока, благодаря чему каждый контроллер инвертора выполнен с возможностью независимого управления соответствующей величиной тока, подаваемого на нагрузку (140).
2. Система по п. 1, в которой по меньшей мере первый инвертирующий усилитель мощности из указанного множества инвертирующих усилителей мощности имеет электрические характеристики, отличающиеся от электрических характеристик по меньшей мере второго инвертирующего усилителя мощности из указанного множества инвертирующих усилителей мощности, причем
одно и то же заданное значение (Iq_command) тока, подаваемое на первый инвертирующий усилитель мощности и на второй инвертирующий усилитель мощности, приводит к неравномерной обработке тока среди указанного множества инвертирующих усилителей мощности.
3. Система по п. 1 или 2, в которой независимое управление соответствующей величиной тока, подаваемого на нагрузку, обеспечивает уменьшение:
дисбаланса токов в указанном множестве инвертирующих усилителей мощности;
потерь мощности указанного множества инвертирующих усилителей мощности;
тока циркуляции по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности и/или
электрических помех, создаваемых указанным множеством инвертирующих усилителей мощности.
4. Система по п. 1 или 2, в которой по меньшей мере два из указанного множества инвертирующих усилителей мощности выполнены с возможностью подачи питания на общую нагрузку (505).
5. Система по п. 4, в которой общая нагрузка содержит двигатель (M1, М2, …, Mj).
6. Система по п. 1 или 2, в которой указанное множество контроллеров инверторов содержится в системном контроллере (105), причем
системный контроллер также содержит каскад (305) общего контроллера, выполненный с возможностью:
определения (605) величины (Iq_system) общего тока системы для достижения заданной частоты (235) вращения двигателя и
выработки (610) команд (Iq_command) управления током для распределения величины общего тока системы равномерно (Iq_system/n) среди указанного множества инвертирующих усилителей мощности.
7. Система по п. 6, в которой каскад общего контроллера также содержит модуль (215) тока циркуляции, выполненный с возможностью:
сравнения (620), в ответ на выработку команд управления током, величин тока, соответствующих каждому из указанного множества инвертирующих усилителей мощности; и
определения (625), на основе проведенного сравнения, тока (Icirculation(1), Icirculation(2), …, Icirculation(n)) циркуляции, существующего по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности,
причем указанное множество контроллеров инверторов также выполнены с возможностью регулировки соответствующей величины тока, подаваемого на нагрузку, на основе определенного тока циркуляции.
8. Способ (600) управления получением тока множеством инвертирующих усилителей (1251, 1252, …, 125n) мощности, управляемых множеством контроллеров (325(1), 325(2), …, 325(n)) инверторов, включающий:
определение (615) множества величин (Iabc(1), Iabc(2), …, Iabc(n)) тока, каждую из которых получают соответствующим инвертирующим усилителем мощности из указанного множества инвертирующих усилителей мощности;
преобразование (630) системы координат каждой из указанного множества величин тока с получением множества преобразованных величин (Idq(1), Idq(2), …, Idq(n)) тока и
выработку (635), на основе указанного множества преобразованных величин тока, принятых указанным множеством контроллеров инверторов, команд (330(1), 330(2), …, 330(n)) управления вентилем для указанного множества инвертирующих усилителей мощности,
причем применение вырабатываемых команд управления вентилем обеспечивает регулировку по меньшей мере одной из указанного множества величин тока с уменьшением таким образом дисбаланса токов по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности.
9. Способ по п. 8, согласно которому применение вырабатываемых команд управления вентилем также обеспечивает уменьшение:
потерь мощности указанного множества инвертирующих усилителей мощности;
тока циркуляции по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности и/или
электрических помех, создаваемых указанным множеством инвертирующих усилителей мощности.
10. Способ по п. 8 или 9, согласно которому по меньшей мере первый инвертирующий усилитель мощности из указанного множества инвертирующих усилителей мощности имеет электрические характеристики, отличающиеся от электрических характеристик по меньшей мере второго инвертирующего усилителя мощности из указанного множества инвертирующих усилителей мощности, причем
одно и то же заданное значение (Iq_command) тока, подаваемое на первый инвертирующий усилитель мощности и на второй инвертирующий усилитель мощности, приводит к неравномерной обработке тока среди указанного множества инвертирующих усилителей мощности.
11. Способ по п. 8 или 9, также включающий:
определение (605) величины (Iq_system) общего тока системы для достижения заданной частоты (235) вращения двигателя и
выработку (610) первоначальных команд (Iq_command) управления током для распределения величины общего тока системы равномерно (Iq_system/n) среди указанного множества инвертирующих усилителей мощности с использованием множества первоначальных команд управления вентилем,
причем определение указанного множества величин тока выполняют в ответ на применение первоначальных команд управления вентилем.
12. Способ по п. 11, также включающий:
сравнение (620), в ответ на применение первоначальных команд управления вентилем, соответствующей величины тока, получаемого каждым из указанного множества инвертирующих усилителей мощности; и
определение (625) наличия дисбаланса токов на основе проведенного сравнения.
13. Способ по п. 8 или 9, также включающий:
обеспечение (640), с использованием вырабатываемых команд управления вентилем, принятых указанным множеством инвертирующих усилителей мощности, подачи питания от указанного множества инвертирующих усилителей мощности на общую нагрузку (505).
14. Способ по п. 13, согласно которому общая нагрузка содержит двигатель (M1, М2, …, Mj).
15. Энергонезависимый компьютерочитаемый носитель, содержащий компьютерный программный код, который при исполнении в процессе работы одного или более компьютерных процессоров, реализует операцию (600) управления получением тока множеством инвертирующих усилителей (1251, 1252, …, 125n) мощности, управляемых множеством контроллеров (325(1), 325(2), …, 325(n)) инверторов, при этом указанная операция включает:
определение (615) множества величин (Iabc(1), Iabc(2), …, Iabc(n)) тока, каждая из которых получена соответствующим инвертирующим усилителем мощности из указанного множества инвертирующих усилителей мощности;
преобразование (630) системы координат каждой из указанного множества величин тока с получением множества преобразованных величин (Idq(1), Idq(2), …, Idq(n)) тока и
выработку (635), на основе указанного множества преобразованных величин тока, принятых указанным множеством контроллеров инверторов, команд (330(1), 330(2), …, 330(n)) управления вентилем для указанного множества инвертирующих усилителей мощности,
причем применение вырабатываемых команд управления вентилем обеспечивает регулировку по меньшей мере одной из указанного множества величин тока с уменьшением таким образом дисбаланса токов по меньшей мере между двумя из указанного множества инверторов.
16. Компьютерочитаемый носитель по п. 15, причем применение вырабатываемых команд управления вентилем также обеспечивает уменьшение:
потерь мощности указанного множества инвертирующих усилителей мощности;
тока циркуляции по меньшей мере между двумя из указанного множества инвертирующих усилителей мощности и/или
электрических помех, создаваемых указанным множеством инвертирующих усилителей мощности.
17. Компьютерочитаемый носитель по п. 15 или 16, причем указанная операция также включает:
определение (605) величины (Iq_system) общего тока системы для достижения заданной частоты (235) вращения двигателя; и
выработку (610) первоначальных команд (Iq_command) управления током для распределения величины общего тока системы равномерно (Iq_system/n) среди указанного множества инвертирующих усилителей мощности с использованием множества первоначальных команд управления вентилем,
причем определение указанного множества величин тока обеспечено в ответ на применение первоначальных команд управления вентилем.
18. Компьютерочитаемый носитель по п. 17, причем указанная операция также включает:
сравнение (620), в ответ на применение первоначальных команд управления вентилем, соответствующей величины тока, получаемого каждым из указанного множества инвертирующих усилителей мощности; и
определение (625) наличия дисбаланса токов на основе проведенного сравнения.
19. Компьютерочитаемый носитель по п. 15 или 16, причем указанная операция также включает:
обеспечение (640), с использованием вырабатываемых команд управления вентилем, принятых указанным множеством инвертирующих усилителей мощности, подачи питания от указанного множества инвертирующих усилителей мощности на общую нагрузку (505).
20. Компьютерочитаемый носитель по п. 19, причем общая нагрузка содержит двигатель (M1, М2, …, Mj).
| DE 4105868 А1, 05.09.1991 | |||
| JP 2001112295 А, 20.04.2001 | |||
| JP 4325893 А, 16.11.1992 | |||
| US 20110156623 А1, 30.06.2011 | |||
| WEI YONGQING et al, Control of parallel inverters based on CAN bus in large capacity motor drives, ELECTRIC UTILITY DEREGULATION AND RESTRUCTURING AND POWER TECHNOLOGIES, 2008, p | |||
| Устройство для охлаждения пневматических колесных шин | 1924 |
|
SU1375A1 |

