ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Нижеследующее относится к областям техники визуализации, областям техники медицинской визуализации, областям техники обработки изображений, областям техники обработки медицинских изображений и связанных областей техники.
УРОВЕНЬ ТЕХНИКИ
Размытие из-за конечного разрешения детектора присутствует в методах медицинской визуализации, например однофотонной эмиссионной компьютерной томографии (SPECT), позитронной эмиссионной томографии (PET), трансмиссионной компьютерной томографии (CT) и других методах медицинской визуализации. Используя томографию SPECT в качестве наглядного примера, если идеальный точечный источник излучения отображается гамма-камерой, изображение размывается из-за конечного коллимационного отверстия коллиматора излучения. Для коллиматора веерного или конического пучка лучей размытие пространственно зависит и от расстояния от компоновки коллиматора/детектора, и от поперечного положения на лицевой стороне компоновки коллиматора/детектора. В томографии PET подобное размытие возникает из-за конечной пространственной точности (то есть ненулевой площади или объема локализации) событий обнаружения гамма-кванта в 511 кэВ в сцинтиллирующем кристалле. Конечная пространственная точность также существует в томографии CT.
Проблема размытия может решаться на аппаратном уровне посредством улучшенной конструкции системы визуализации. Например, в томографии SPECT более длинные отверстия коллиматора могут улучшить коллимацию для уменьшения размытия, хотя и за счет уменьшенной скорости счета. В томографии PET иногда используется логика Ангера для улучшения пространственной точности, но некоторое размытие остается. В томографии CT может использоваться более высокая интенсивность рентгеновского излучения, но это увеличивает радиоактивное облучение пациента. Аналогично, увеличение вводимой дозы радиоактивного медицинского препарата может быть полезным в томографии SPECT и PET. Однако для визуализации человека соображения безопасности и юрисдикционные правительственные постановления обычно ограничивают допустимую экспозицию рентгеновского излучения или радиофармацевтическую дозу.
Размытие можно также математически компенсировать во время процесса реконструкции изображения. Некоторые существующие технические приемы коррекции размытия для томографии SPECT с расходящимся пучком не зависят от смещения, а это означает, что они учитывают зависимость размытия от расстояния, но предполагают, что размытие не зависит от поперечного положения на лицевой стороне блока коллиматора/детектора.
Ниже приводятся новые и улучшенные устройства и способы, которые преодолевают вышеупомянутые и иные проблемы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В соответствии с одним раскрытым аспектом устройство содержит: модуль трассировки лучей, который содержит цифровой процессор, выполненный с возможностью выполнять операцию проецирования для детектора, имеющего изменяющееся со смещением размытие посредством (i) вычисления приращения луча между плоскостями, параллельными лицевой стороне детектора, (ii) вычисления стационарных приращений зерен размытия, соответствующих приращениям луча, (iii) пошагового суммирования приращений луча, свернутых с соответствующими стационарными приращениями зерен размытия, для получения проекции и (iv) корректировки проекции на изменяющееся со смещением размытие; и итеративный модуль реконструкции изображения, который содержит цифровой процессор, выполненный с возможностью создавать реконструированное изображение по проекционным данным с использованием итеративной реконструкции, которая включает операцию проецирования, выполняемую модулем трассировки лучей.
В соответствии с другим раскрытым аспектом, как указано в непосредственно предшествующем абзаце, раскрывается устройство, в котором операция проецирования, выполняемая модулем трассировки лучей, включает в себя выполнение корректировки (iv) посредством свертки с нестационарным зерном размытия в плоскости, ближайшей к лицевой стороне детектора для создания проекции, включающей в себя изменяющееся со смещением размытие.
В соответствии с другим раскрытым аспектом способ реконструкции изображения включает в себя: реконструкцию изображения с использованием итеративного способа реконструкции; и вычисление проекции, используемой в реконструкции посредством (i) вычисления приращений лучей между соседними плоскостями параллельными лицевой стороне детектора, имеющего изменяющееся со смещением размытие, (ii) вычисления стационарных приращений зерен размытия между соседними плоскостями параллельными лицевой стороне детектора, которое основано на расстоянии между соседними параллельными плоскостями, (iii) пошагового суммирования приращений лучей, свернутых с соответствующими стационарными приращениями зерен размытия, для вычисления проекции и (iv) корректировки проекции на изменяющееся со смещением размытие.
В соответствии с другим раскрытым аспектом, как указано в непосредственно предшествующем абзаце, раскрывается способ реконструкции изображения, в котором корректировка (iv) содержит свертку с нестационарным зерном размытия в одной из выбранных соседних плоскостей.
В соответствии с другим раскрытым аспектом способ реконструкции изображения содержит: реконструкцию изображения с использованием итеративного способа реконструкции; и вычисление проекции, используемой в реконструкции, посредством (i) суммирования приращений лучей между соседними плоскостями, параллельными лицевой стороне детектора, имеющего изменяющееся со смещением размытие, со стационарным приращением размытия, соответствующим каждому приращению луча, вычисленным на основании расстояния между соседними параллельными плоскостями, и (ii) с учетом изменяющегося со смещением размытия по меньшей мере в одном направлении, параллельном соседним параллельным плоскостям.
В соответствии с другим раскрытым аспектом, как указано в непосредственно предшествующем абзаце, раскрывается способ реконструкции изображения, в котором операция (ii) включает в себя свертку с нестационарным зерном размытия в плоскости, ближайшей к лицевой стороне детектора, для учета изменяющегося со смещением размытия по меньшей мере в одном направлении, параллельном соседним параллельным плоскостям.
В соответствии с другим раскрытым аспектом процессор реконструкции изображения запрограммирован выполнять способ реконструкции изображения, как указано в любом из четырех непосредственно предшествующих абзацев. В соответствии с другим раскрытым аспектом носитель данных хранит инструкции, исполняемые цифровым процессором, для выполнения способа реконструкции изображения, как указано в любом из четырех непосредственно предшествующих абзацев.
Одно из преимуществ состоит в обеспечении эффективной в вычислительном отношении коррекции изменяющегося со смещением размытия.
Еще одно преимущество состоит в обеспечении улучшенного качества изображения.
Другие преимущества будут очевидны специалистам в области техники после чтения и понимания следующего подробного описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 схематически изображает систему визуализации, которая включает в себя реконструкцию изображения с учетом коррекции изменяющегося со смещением размытия.
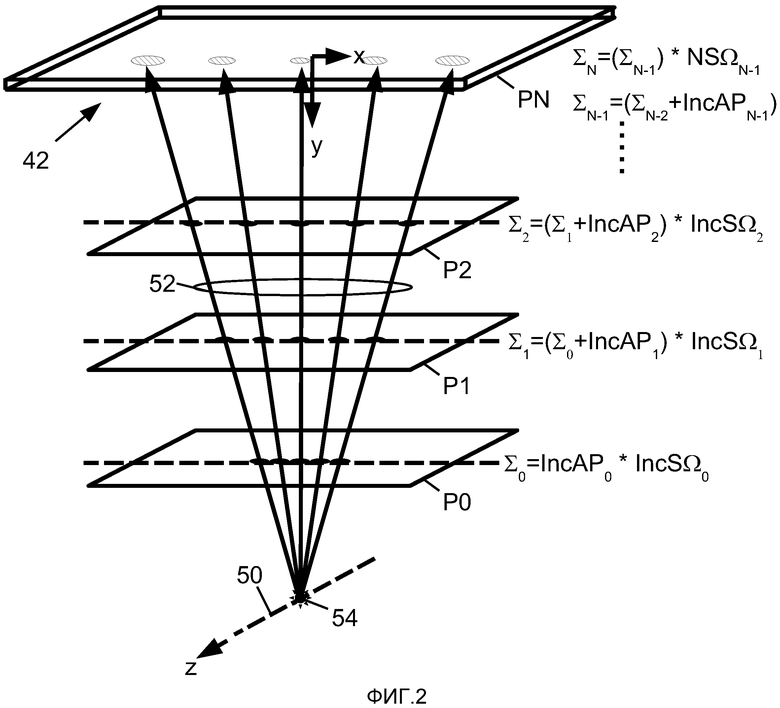
Фиг. 2 схематически изображает операцию проецирования, вычисленную посредством итеративной трассировки лучей и учитывающую изменяющееся со смещением размытие.
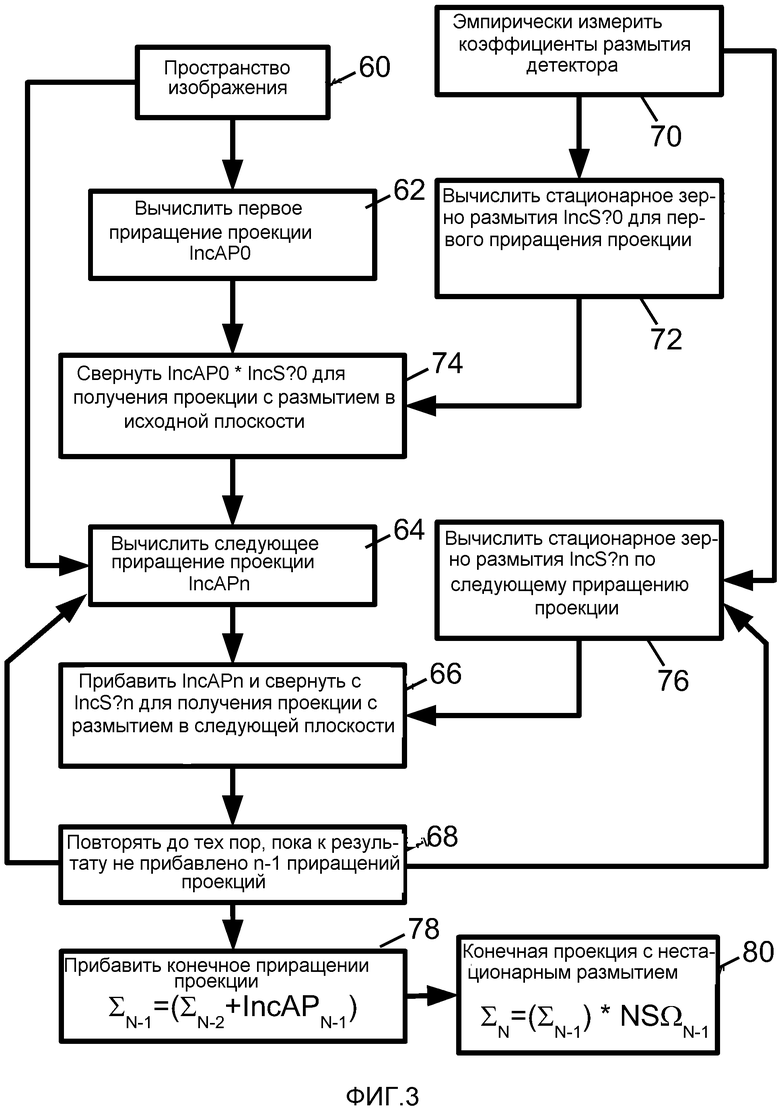
Фиг. 3 схематически изображает работу модуля трассировки лучей по выполнению операции проецирования с учетом изменяющегося со смещением размытия Фиг. 1.
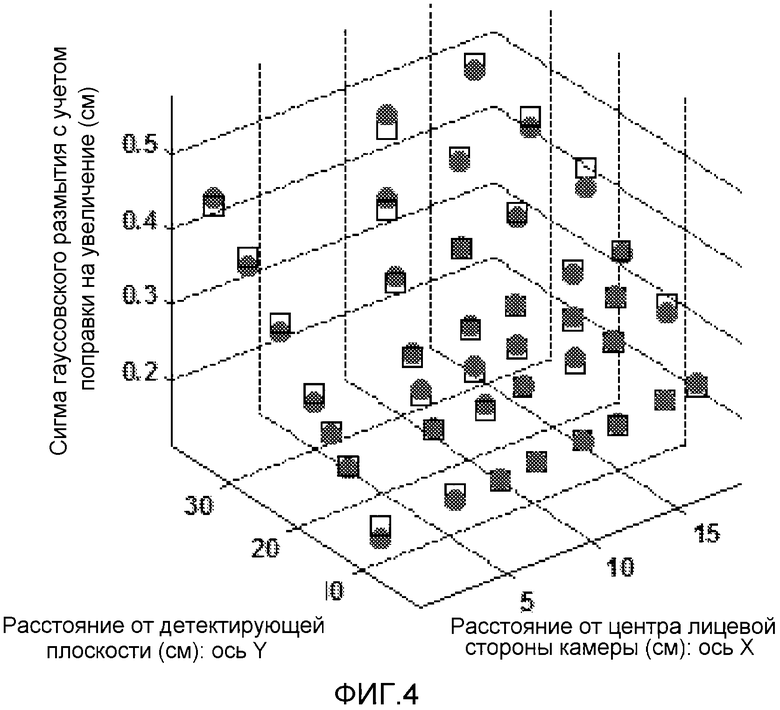
Фиг. 4 схематически показывает линейную регрессивную подгонку сигмы гауссовского размытия с поправкой на увеличение.
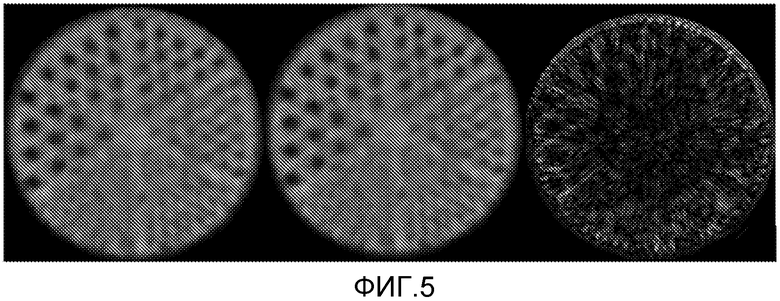
Фиг. 5 показывает результаты визуализации, полученные для фантома.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на Фиг. 1 система визуализации включает в себя устройство 10 визуализации, которое в изображенном варианте осуществления является гамма-камерой, настроенной на получение проекционных данных однофотонной эмиссионной компьютерной томографии (SPECT). Изображенная гамма-камера 10 в значительной степени подобна SKYLight сцинтилляционной камере без гентри, доступной от Koninklijke Philips Electronics N.V. (Эйндховен, Нидерланды), и включает в себя детекторы 12, 14 излучения, смонтированные на соответствующих роботизированных руках 16, 18. Альтернативно, может использоваться сцинтилляционная камера на основе гентри, в которой детекторы 12, 14 смонтированы на гентри 20 (показан пунктиром для указания альтернативного варианта осуществления), как правило, вместе с дополнительными манипуляторами для обеспечения поворотов, наклонов или иных манипуляций с детекторами излучения. Примером гамма-камеры на основе гентри является устройство для визуализации BrightView SPECT, также доступное от Koninklijke Philips Electronics N.V. (Эйндховен, Нидерланды). Пациент для визуализации помещается или располагается на столе 22 для пациента так, чтобы быть расположенным для осмотра детекторами 12, 14 излучения.
Устройство визуализации может генерировать проекционные данные другого метода медицинской визуализации помимо томографии SPECT, примерами могут служить сканер позитронной эмиссионной томографии (PET), генерирующий проекционные данные томографии PET, или сканер трансмиссионной компьютерной томографии (CT), генерирующий проекционные данные томографии CT, и так далее. В случае томографии SPECT и CT используются коллиматоры для пространственного определения проекций, тогда как проекции томографии PET определяются одновременным обнаружением (или в значительной степени одновременным обнаружением в случае времяпролетной томографии PET) двух противоположно направленных гамма-частиц с энергией 511 кэВ, излучаемых в результате события электронно-позитронной аннигиляции.
В случае томографии SPECT и PET радиоактивный медицинский препарат, содержащий радиоизотоп, вводится внутрь пациента, радиоактивный медицинский препарат преимущественно накапливается в интересующем органе или ткани, а детекторы 12, 14 излучения обнаруживают радиоизлучение радиоизотопа. Следовательно, в томографии SPECT и PET проекционные данные соответствуют распределению радиоактивного медицинского препарата в пациенте. В случае томографии CT рентгеновская трубка генерирует луч рентгеновского излучения, который проходит через пациента и принимается массивом детекторов излучения после прохождения через пациента. Следовательно, в томографии CT проекционные данные соответствуют поглощению рентгеновских лучей пациентом.
Устройство 10 визуализации работает под управлением контроллера 24, который для изображенной роботизированной гамма-камеры 10 представляет собой контроллер роботизированных рук и другую управляющую электронику. Контроллер 24 управляет гамма-камерой 10 для получения проекционных данных томографии SPECT с помощью детекторов 12, 14 излучения, расположенных в различных точках вокруг пациента для получения 180°, 360° или другого требуемого углового охвата проекционных данных. Сбором проекционных данных обычно управляет радиолог или другой пользователь посредством подходящего пользовательского интерфейса, например изображенного компьютера 26. Полученные проекционные данные томографии SPECT сохраняются в памяти 28 данных томографии SPECT. В случае сканера томографии PET обычно используется стационарное кольцо детекторов излучения. В случае томографии CT кольцо детекторов может использоваться в сочетании с рентгеновской трубкой, которая вращается вокруг пациента, или сборки рентгеновской трубки и противоположно расположенного массива детекторов излучения, которые могут поворачиваться так, что рентгеновская трубка и массив детекторов излучения вращаются согласованно вокруг пациента. Также предусмотрены другие конфигурации стационарных или подвижных детекторов излучения и источников радиации, внутренних или внешних по отношению к пациенту. Полученные проекционные данные реконструируются модулем 30 итеративной реконструкции изображения для получения реконструированного изображения, которое сохраняется в памяти 32 реконструированных изображений, выводится на экран 34 изображенного компьютера 26 или другого устройства отображения, печатается с использованием механизма печати, передается через интернет или больничную сеть передачи данных, сохраняется в системе архивирования изображений и связи (PACS) или используются иным образом.
С дальнейшей ссылкой на Фиг. 1 изображенная гамма-камера 10 использует два детектора 12, 14 излучения, определяющих соответствующие лицевые стороны 40, 42 детекторов. В целом, устройство визуализации использует один или более детекторов излучения, каждый из которых задает одну или более лицевых сторон детектора. В томографии PET, например, используется кольцо детекторов, чьи детектирующие лицевые стороны формируют кусочную аппроксимацию кольца или цилиндра вокруг пациента. В общем, проекция, детектируемая детектором 12, 14 излучения, размыта на величину, которая меняется в зависимости от расстояния до лицевой стороны 40, 42 детектора. Например, физический линейный коллиматор не может коллимировать к идеальной линии, а скорее коллимирует к конусу малого угла, площадь которого увеличивается с увеличением расстояния от лицевой стороны 40, 42 детектора. Детекторы 12, 14 также имеют изменяющееся со смещением размытие. В изменяющемся со смещением размытии величина размытия также меняется в зависимости от поперечного положения относительно лицевой стороны 40, 42 детектора, где была детектирована проекция. Источниками зависимости размытия от смещения может быть использование коллиматоров конического или веерного пучка лучей, источника рентгеновского излучения конического или веерного пучка лучей в случае трансмиссионной томографии CT, вариации пространственной точности локализации детекторов в томографии PET относительно лицевой стороны детектора и т.д.
Модуль 30 итеративной реконструкции изображения использует итеративный алгоритм реконструкции. В итеративной реконструкции начальное изображение корректируется итеративным образом до тех пор, пока оно в значительной степени не соответствует полученным проекционным данным. В некоторых таких алгоритмах начальное изображение может быть просто равномерным распределением в пространстве изображения. Для улучшения сходимости опционально может использоваться априорное знание для обеспечения начального изображения, которое ближе к ожидаемому конечному изображению. Например, известный контур пациента или его части, который, как ожидается, будет представлен реконструированным изображением, может использоваться в качестве начального изображения. Чтобы сравнить начальное изображение с полученными проекционными данными, модуль итеративной реконструкции изображения использует модуль 44 трассировки лучей, который проецирует изображение для получения проекционных данных, которые могут быть непосредственно сравнены с полученными проекционными данными. Посредством процесса обратного проецирования начальное изображение корректируется на основании сравнения проецируемого начального изображения и полученных проекционных данных для получения улучшенного изображения. Улучшенное изображение снова проецируется модулем 44 трассировки лучей и сравнивается с полученными проекционными данными, выполняется дальнейшая корректировка изображения и т.д. итеративным образом до тех пор, пока итеративно улучшенное изображение при проецировании модулем 44 трассировки лучей не становится в достаточной мере близко к полученным проекционным данным, как это измерено подходящим критерием остановки.
Чтобы обеспечить более точную реконструкцию, модуль 44 трассировки лучей (Фиг. 1) учитывает размытие. Другими словами, при расчете проекций изображения модуль 44 трассировки лучей вводит размытие в проекцию так, чтобы имитировать размытие, которое, как ожидается, будет присутствовать в полученных проекционных данных из-за физических ограничений в коллимации или других источников размытия.
С дальнейшей ссылкой на Фиг. 1 и с дополнительной ссылкой на Фиг. 2 далее описывается работа модуля 44 трассировки лучей. В нижеследующем описывается работа модуля 44 трассировки лучей в качестве проектора, однако работа в качестве обратного проектора аналогична. Фиг. 2 схематически изображает лицевую сторону 42 детектора 14 излучения Фиг. 1, которая в наглядном примере, показанном на Фиг. 2, как предполагается, обеспечивает веерную коллимацию. Выбирается система координат, в которой расстояние от лицевой стороны 42 детектора измеряется вдоль координаты Y, ориентированной перпендикулярно к лицевой стороне 42 детектора. Веерная коллимация происходит вдоль координаты X, ориентированной параллельно лицевой стороне 42 детектора. У веерной коллимации есть фокальная линия 50, лежащая перпендикулярно к обеим координатам X и Y. Для иллюстративных целей показан ряд проекций 52, исходящих из точки 54, лежащей на фокальной линии 50. Проекция вычисляется посредством деления пространства между источником 54 и лицевой поверхностью 42 детектора, в котором находится пациент, на множество параллельных плоскостей, каждая из которых параллельна лицевой стороне 42 детектора. Для иллюстративных целей Фиг. 2 изображает три таких плоскости, обозначенные P0, P1, P2. Без потери общности предполагается, что через визуализируемого пациента (или другой элемент в поле обзора, который вносит вклад в проекции) проходит N таких плоскостей с номерами 0,...,N-1. Лицевая сторона 42 детектора совпадает с N-ой плоскостью, которая обозначена на Фиг. 2 как PN. Плоскости P0, P1, P2,..., PN параллельны друг другу и лицевой стороне 42 детектора, и для вычисления проекции используется прием проецирования с помощью трассировки лучей. Направление Y является перпендикулярным к плоскостям P0, P1, P2,..., PN, а направление X параллельно плоскостями P0, P1, P2,..., PN.
С дальнейшей ссылкой на Фиг. 1 и 2 и дополнительной ссылкой на Фиг. 3 модуль 44 трассировки лучей выполняет операцию проецирования для вычисления одной из проекций 52. Как исходная точка рассмотрения вычисляется проекция для заданной конфигурации (заданной направлением, длиной и конечной точкой на лицевой стороне 42 детектора) в пространстве 60 изображения. Пространством 60 изображения может, например, быть начальное изображение, используемое для начала итеративной реконструкции изображения, или может быть одно из многократно улучшенных изображений, генерируемых в ходе итеративной реконструкции. Плотность в пространстве 60 изображения представляет то, что было измерено при получении проекционных данных. Для данных томографии SPECT или PET плотность пространства 60 изображения представляет собой плотность радиоактивного медицинского препарата. Для данных томографии CT плотность пространства 60 изображения представляет собой поглощение рентгеновских лучей (или эквивалентную величину, например обратную поглощению рентгеновских лучей).
С продолжающимся особым акцентом на Фиг. 3, вычисляется проекция посредством трассировки лучей итеративным образом путем вычисления приращений луча (то есть приращений проекций в случае операции проецирования) между последовательными соседними плоскостями P0, P1, P2,..., параллельными лицевой стороне 42 детектора. На Фиг. 3 приращение проекции от источника 54 к первой параллельной плоскости P0 (в пространстве 60 изображения) вычисляется в ходе операции 62. Это первое приращение проекции обозначено в настоящем документе как IncAP0. Приращение проекции от плоскости P0 к плоскости P1 (опять же в пространстве 60 изображения) вычисляется в ходе операции 64 и обозначается как IncAP1, и это приращение проекции IncAP1 прибавляется к приращению проекции IncAP0 от источника 54 к первой параллельной плоскости P0 в ходе операции 66 суммирования. Операция 68 цикла повторяет операции 64, 66 для приращений от плоскости P1 к плоскости P2 и т.д. для сложения приращений проекций IncAP0, IncAP1, IncAP2,..., до тех пор пока не будет прибавлено приращение IncAPN-1 от плоскости (N-2) к плоскости (N-1).
С дальнейшей ссылкой на Фиг. 2 и 3 теперь обсуждается учет размытия. Символ σx(x,y) используется для обозначения размытия вдоль направления X в пространственной координате (x,y). Сначала кратко описывается схема учета размытия без приращений. Эта схема без приращений не показана на Фиг. 1 и не изображена никаким иным образом и описывается только с целью сравнения. В схеме без приращений σx(x,y) вычисляется для каждой параллельной плоскости P0, P1, P2,... и для каждой точки пересечения проекции с лицевой стороной 42 детектора. Поскольку размытие σx(x,y) в общем зависит от смещения, размытие в данной плоскости представлено через NSΩ, которое обозначает нестационарное зерно размытия. В этой схеме без приращений инкрементная проекция IncAP для каждой плоскости сворачивается с нестационарным зерном NSΩ размытия для этой плоскости, и это накапливается для всех плоскостей, давая в итоге прямую проекцию.
У схемы без приращений для учета размытия есть существенные недостатки с точки зрения использования памяти (так как нестационарное размытие σx(x,y) должно быть вычислено и сохранено для каждой параллельной плоскости P0, P1, P2,... и для каждой точки пересечения проекции с лицевой стороной 42 детектора). Соответственно, схема с приращениями для вычисления проекций в контексте пространственно неоднородного детектора (например, детектора веерного пучка лучей, детектора конического пучка лучей или другого детектора пространственно расходящегося пучка лучей), учитывающая неизменяющееся со смещением размытие, раскрыта в настоящем документе и изображена на Фиг. 2 и 3. Схема с приращениями опционально дополнительно включает изменяющееся со смещением размытие в операции свертки с нестационарным зерном, которое выполняется в плоскости N-1, ближайшей к лицевой стороне 42 детектора.
Предполагается, что в схеме с приращениями размытие σx(x,y) представлено моделью изменяющегося со смещением размытия на лицевой стороне 42 детектора, которая имеет (для иллюстративного случая одномерной веерной коллимации вдоль направления X, как изображено на Фиг. 2) следующий вид:
где x обозначает направление изменения смещения, параллельное лицевой стороне 42 детектора, y обозначает направление, перпендикулярное лицевой стороне 42 детектора и перпендикулярное плоскостям P0, P2, P2,..., PN, которые параллельны лицевой стороне 42 детектора, bxy, bx0 и bxx обозначают скалярные коэффициенты размытия, а σx(x,y) является показателем размытия вдоль направления X в пространственной координате (x,y). Скалярные коэффициенты размытия могут быть определены эмпирически посредством побуждения контроллером 24 получения устройством 10 визуализации калибровочных проекционных данных с использованием детектора 14 излучения, определяющего лицевую сторону 42 детектора. Затем контроллер 24 генерирует модель изменяющегося со смещением размытия лицевой стороны 42 детектора на основании полученных калибровочных проекционных данных.
В подходящем подходе функция отклика (то есть модель изменяющегося со смещением размытия) коллиматора веерного пучка лучей соответственно измеряется с использованием множества (например, 8) линейных источников радиации (например, линейных источников, заполненных 99mTc), расположенных перед лицевой стороной 42 детектора в двух направлениях: параллельном оси вращения камеры для измерения размытия в направлении веера пучка или направлении X и параллельном вееру пучка или направлению X для измерения размытия в направлении, перпендикулярном и направлению X и направлению Y (обозначенном в настоящем документе как направление Z). В наглядном примере, который в действительности выполнялся, чтобы предоставить данные для моделирования зависимого от расстояния разрешения, линейные источники имели внутренний диаметр 1,14 мм и отображались на нескольких расстояниях от коллиматора, в пределах от 3 до 28 см с интервалом в 5 см. Каждый линейный источник был аппроксимирован рядом гауссовских функций, перпендикулярных линии, и было получено среднее σ всех гауссианов, подогнанных к каждому линейному источнику. Число линий в поле обзора (FOV) в направлении веера пучка уменьшается с расстоянием от лицевой стороны 42 детектора так, что были видны только 3 линии при максимальном Y-расстоянии. Таким образом, использовались только 39 точек данных для оценки размытия σx вдоль направления X. Этот процесс повторялся для горизонтально ориентированных линейных источников для оценки σz. Измеренное размытие сравнивалось с полученным аналитически, включая эффект удлинения отверстий. Обратим внимание, что измеренная функция отклика детектора включает в себя внутреннее разрешение детектора. Регрессионная модель для σx была определена как функция поперечного расстояния вдоль направления X от центра лицевой стороны 42 детектора и как функция расстояния от лицевой стороны 42 детектора вдоль направления Y для получения подогнанных значений для скалярных коэффициентов размытия bxy, bx0 и bxx уравнения (1).
С краткой ссылкой на Фиг. 4 показано изменение среднеквадратичного отклонения размытия σx (без учета увеличения) для коллиматора веерного пучка лучей с расстоянием вдоль направления Y от панели коллиматора и расстоянием от центра лицевой стороны детектора вдоль направления X. Точки, полученные из подгонки регрессии, показаны как темные кружки, в то время как точки результатов измерений показаны квадратами. Было определено, что чувствительность коллиматора изменяется лишь незначительно вдоль лицевой поверхности (<1%).
С дальнейшей ссылкой на Фиг. 2 в схеме с приращениями приращение размытия между последовательными (то есть соседними) параллельными плоскостями одинаково для всех приращений проекций между параллельными плоскостями. Это можно видеть из модели размытия в уравнении (1), где для любой отдельной проекции член bxxx является постоянным от одной параллельной плоскости к следующей соседней параллельной плоскости. На основании этого наблюдения компонент изменяющегося со смещением размытия обрабатывается отдельно от компонента неизменяющегося со смещением размытия. В этом подходе приращение размытия между соседним параллельным плоскостям для каждого приращения проекции полагается компонентом неизменяющегося со смещением (и поэтому стационарного) размытия, который изменяется только в зависимости от вертикального расстояния (то есть расстояния вдоль направления Y) между плоскостями. Это расстояние обозначается в настоящем документе как ∆y. Стационарное приращение зерна размытия между плоскостью с индексом n и следующей соседней плоскостью с индексом n+1 обозначается как IncSΩn и дается выражением:

Иначе говоря, IncSΩn обозначает приращение зерна размытия, примененное к приращению проекции IncAPn между плоскостями n-1 и n.
С дальнейшей ссылкой на Фиг. 2 и 3 неизменяющееся со смещением размытие может быть включено в проекцию детектора, имеющего изменяющееся со смещением размытие, на основании этой концепции приращения размытия, как показано на Фиг. 3. Коэффициенты размытия детектора bxy, bx0 и bxx уравнения (1) определяются эмпирически в ходе операции 70. Стационарное зерно размытия IncSΩ0, соответствующее первому приращению проекции IncAP0, вычисляется в ходе операции 72. Первое приращение проекции IncAP0 сворачивается с соответствующим стационарным зерном размытия IncSΩ0 в ходе операции 74. Это соответственно представляется математически как:
Σ0=IncAP0*IncSΩ0(3),
где символ "*" используется в настоящем документе для обозначения операции свертки. Другими словами, Σ0 представляет собой размытую версию первого приращения проекции IncAP0. В более общем смысле в ходе операции 76 стационарное зерно размытия IncSΩn, соответствующее приращению проекции IncAPn, вычисляется на основании модели изменяющегося со смещением размытия на лицевой стороне 42 детектора (например, как дано в уравнении (1) для иллюстративного коллиматора веерного пучка лучей), а операция 66 суммирования модифицируется так, чтобы пошагово суммировать приращения проекций IncAPn, свернутые с соответствующими приращениями зерен размытия IncSΩn вплоть до приращения проекции от плоскости (N-3) к плоскости (N-2). В более математических терминах схема размытия с приращениями, реализованная как изображено на Фиг. 3, может быть сформулирована следующим образом. Пошаговое суммирование 66, выполняемое модулем 44 трассировки лучей, вычисляет проекционные значения, количественно эквивалентные Σn=(Σn-1+IncAPn)*IncSΩn для n=0,...,N-2, где n является индексом плоскостей P0, P1, P2,..., параллельных лицевой стороне 42 детектора, IncAPn обозначает приращение проекции между плоскостями с индексами n и n-1 и IncSΩn обозначает соответствующее приращение зерна размытия (вычисленное в уравнении (2) для иллюстративного примера коллиматора веерного пучка лучей).
Последнее приращение проекции от плоскости (Ν-2) к плоскости (N-1) обрабатывается немного по-другому. Поскольку пациент (или другой элемент, дающий вклад в проекцию) заканчивается в плоскости N-1, нет никакого стационарного приращения компонента размытия IncSΩN-1. Соответственно, в ходе операции 78 последнее приращение проекции (достигающее детектора) добавляется в виде ΣN-1=(ΣN-2+IncAPN-1).
Проекция на чувствительный элемент, включая не изменяющееся со смещением размытие, является выходом операции 80, но со стационарным зерном размытия, соответствующим плоскости N-1 ΣN=(ΣN-1)*SΩN-1. В некоторых вариантах осуществления это считается достаточно точным и берется в качестве конечной проекции. Другими словами, в этих вариантах осуществления компонентом изменяющегося со смещением размытия детекторов 12, 14, имеющих изменяющееся со смещением размытие, пренебрегают, и считается, что вычисленная проекция с компенсированным неизменяющимся со смещением размытием имеет приемлемую точность.
Альтернативно, нестационарный компонент размытия уравнения (1) также может быть принят во внимание для того, чтобы компенсировать размытие, включающее и компоненты неизменяющегося и изменяющегося со смещением размытия. Это делается, принимая во внимание тот факт, что для любой отдельной проекции член bxxx является постоянным от одной параллельной плоскости к следующей соседней параллельной плоскости. В результате компонент изменяющегося со смещением размытия может быть учтен посредством его вычисления для последней плоскости пациента, то есть для плоскости N-1. Это делается на Фиг. 3 в операции 80, которая применяет нестационарное размытие NSΩN-1 в плоскости Ν-1 к конечной проекции согласно выражению ΣN=(ΣN-1)*NSΩN-1, где нестационарное размытие NSΩN-1 в плоскости Ν-1 получается путем вычисления уравнения (1) в плоскости Ν-1 для получения конечной проекции, включающей в себя изменяющееся со смещением размытие.
Работа модуля 44 трассировки лучей по выполнению операции обратного проецирования выполняется в обратном направлении. В случае обратного проецирования конечная проекция (без размытия) является отправной точкой, и трассировка лучей начинается с плоскости Ν-1 ближайшей к детектору и идет назад к начальной плоскости 0. Приращение зерна размытия используется для пошагового прибавления стационарного размытия для каждого приращения луча (то есть, приращения обратной проекции в случае обратного проецирования). Конечная обратная проекция является содержимым изображения с неизменяющимся со смещением размытием. Если требуется включить изменяющееся со смещением размытие, то вначале учитывается нестационарное зерно посредством свертки в плоскости Ν-1, ближайшей к детектору так, чтобы конечная обратная проекция содержала изображение с изменяющимся со смещением размытием.
Наглядный пример легко модифицируется для включения других моделей размытия, которые моделируют другие типы лицевых сторон детектора. Например, модель изменяющегося со смещением размытия на лицевой стороне детектора может включать в себя зависимость от смещения в двух не параллельных направлениях, оба из которых параллельны лицевой стороне детектора. Это подходит, например, для моделирования лицевой стороны детектора, имеющего коническую коллимацию. В этом случае модель изменяющегося со смещением размытия включает в себя член σα(α,β,y), являющийся показателем размытия вдоль направления α в пространственной координате (α,β,y) вида bα0 + bαyy + bααα, где α обозначает одно из двух направлений изменения смещения, параллельное лицевой стороне детектора, y обозначает направление, перпендикулярное к лицевой стороне детектора и перпендикулярное к плоскостям, параллельным лицевой стороне детектора, и bαy, bα0 и bαα обозначают скалярные коэффициенты размытия. Модель изменяющегося со смещением размытия дополнительно включает в себя член σβ(α,β,y), являющийся показателем размытия вдоль направления β в пространственной координате (α,β,y) вида bβ0+bβyy+bβββ, где β обозначает второе из двух направлений изменения смещения, параллельное лицевой стороне детектора, и bβy, bβ0 и bββ обозначают скалярные коэффициенты размытия. Опять же, приращение размытия между последовательными (то есть соседними) параллельным плоскостям одинаково для всех приращений лучей, имеющих место между параллельным плоскостями для данной проекции, как видно из модели размытия, где для любого отдельного приращения луча каждый из членов bααα и bβββ являются константами от одной параллельной плоскости до следующей соседней параллельной плоскости. И тогда стационарное приращение размытия может быть записано аналогично тому, как показано в уравнении (2), и пошаговое суммирование Σn=(Σn-1+IncAPn)*IncSΩn применяется так же, как в показанном варианте осуществления, в некоторых случаях сопровождаемое конечным включением нестационарного компонента размытия посредством операции свертки ΣN = (ΣN-1) * NSΩN-1 операции 80 Фиг. 3.
Со ссылкой на Фиг. 5 показано сравнение реконструкций изображения, полученных с фантома проекционных данных, реконструированных с использованием коррекций неизменяющегося и изменяющегося со смещением размытия. Использовался фантом QC корпорации Data Spectrum. Фиг. 5 показывает одинаковые части изображения, взятые из реконструированных изображений фантома QC с и без коррекцией изменяющегося со смещением размытия. Крайнее левое изображение было реконструировано с коррекцией неизменяющегося со смещением размытия. Среднее изображение было реконструировано с коррекцией изменяющегося со смещением размытия. Самое правое изображение является изображением разности. Изображения были реконструированы с меньшим размером пикселя (~60%), чем получены, таким образом изображение разности не показывает существенного изменения в реконструированном изображении. Однако обратите внимание на более четкое обозначение отверстий вблизи внешней границы фантома и в 5-ом наименьшем размере стержней с использованием изменяющегося со смещением моделирования на лицевой стороне в реконструкции.
Схема с приращениями размытия более эффективна с точки зрения скорости вычислений и использования памяти для реализации коррекции изменяющегося со смещением размытия. Скорость вычислений в 1.5 раза больше, чем скорость для схемы без приращений. Использование памяти составляет приблизительно лишь 1% от использования памяти в схеме без приращений.
Возвращаясь к ссылке на Фиг. 1, модуль 30 итеративной реконструкции изображения, который включает в себя модуль 44 трассировки лучей, учитывающий изменяющееся со смещением размытие путем использования подхода к размытию с приращениями, раскрытого в настоящем документе, соответственно воплощен цифровым процессором, запрограммированным выполнять итеративную реконструкцию изображения, которая включает в себя операцию проецирования, включающую размытие, как описано со ссылкой на Фиг. 2 и 3. Цифровой процессор может, например, быть воплощен в виде центрального процессора (который может быть многоядерным процессором) компьютера 26 или графическим процессором (GPU), микропроцессором, микроконтроллером и так далее или их различными комбинациями. Компоненты 30, 44 могут быть воплощены в виде одного процессора или отдельными процессорами. Кроме того, раскрытые технические приемы могут быть воплощены как носитель данных, хранящий инструкции, выполняемые цифровым процессором, для выполнения способа реконструкции изображения, который включает в себя коррекцию размытия, как указано в настоящем документе. Носитель данных может, например, включать в себя один или больше элементов из следующего: накопитель на жестких магнитных дисках или другой магнитный носитель данных; оптический диск или другой оптический носитель данных; оперативная память (RAM), постоянное запоминающее устройство (ROM), флэш-память или другой электронный носитель данных; и так далее.
В этой заявке был описан один или более предпочтительных вариантов осуществления. Возможны модификации и изменения после прочтения и понимания предшествующего подробного описания. Предполагается, что заявка может быть истолкована как включающая все такие модификации и изменения, поскольку они находятся в рамках прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к средствам реконструкции изображения. Техническим результатом является компенсация размытия изображения при его реконструкции. Устройство содержит модуль (44) трассировки лучей, содержащий цифровой процессор, осуществляющий проецирование для детектора (14), имеющего изменяющееся со смещением размытие, посредством вычисления приращений лучей между плоскостями (Р0, P1, Р2, …PN), параллельными лицевой стороне (42) детектора, вычисления стационарных приращений зерен размытия, пошагового суммирования приращений лучей, корректировки проекции на изменяющееся со смещением размытие; итеративный модуль (30) реконструкции изображения, генерирующий реконструированное изображение из проекционных данных. 4 н. и 11 з.п. ф-лы, 5 ил.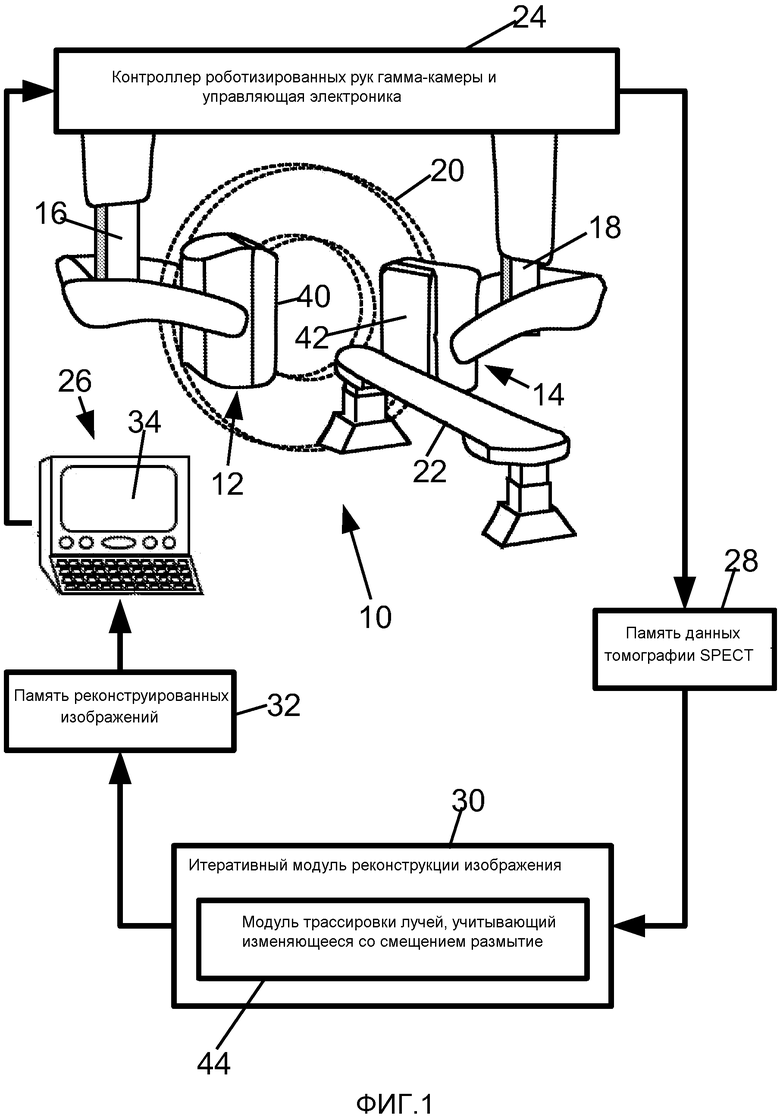
1. Устройство реконструкции изображения, содержащее:
модуль (44) трассировки лучей, который содержит цифровой процессор, выполненный с возможностью осуществлять операцию проецирования для детектора (14), имеющего изменяющееся со смещением размытие, посредством (i) вычисления приращений лучей между плоскостями (Р0, P1, Р2, …PN), параллельными лицевой стороне (42) детектора, (ii) вычисления стационарных приращений зерен размытия, соответствующих приращениям лучей, (iii) пошагового суммирования приращений лучей, подвергнутых свертке с соответствующими стационарными приращениями зерен размытия для получения проекции, и (iv) корректировки проекции на изменяющееся со смещением размытие; и
итеративный модуль (30) реконструкции изображения, который содержит цифровой процессор, выполненный с возможностью генерировать реконструированное изображение из проекционных данных с использованием итеративной реконструкции, которая включает в себя операции проецирования, выполняемые модулем трассировки лучей.
2. Устройство по п.1, в котором операция проецирования, выполняемая модулем (44) трассировки лучей, включает в себя выполнение корректировки (iv) посредством свертки с нестационарным зерном размытия в плоскости, ближайшей к лицевой стороне (42) детектора, для получения проекции с учетом изменяющегося со смещением размытия.
3. Устройство по п.2, в котором нестационарное зерно размытия включает в себя изменение смещения в одном направлении, параллельном лицевой стороне детектора.
4. Устройство по п.3, в котором нестационарное зерно размытия моделирует коллиматор веерного пучка лучей.
5. Устройство по п.2, в котором нестационарное зерно размытия включает в себя изменение смещения в двух непараллельных направлениях, оба из которых параллельны лицевой стороне детектора.
6. Устройство по п.5, в котором модель изменяющегося со смещением размытия на лицевой стороне детектора моделирует коллиматор конического пучка лучей.
7. Устройство по любому из пп.1-6, дополнительно содержащее:
устройство (10) визуализации, которое включает в себя детектор (14) излучения, который определяет лицевую сторону (42) детектора; и
контроллер (24), выполненный с возможностью побуждать устройство визуализации получать проекционные данные и побуждать итеративный модуль (30) реконструкции изображения генерировать реконструированное изображение из полученных проекционных данных.
8. Устройство по п.7, в котором контроллер (24) дополнительно выполнен с возможностью побуждать устройство (10) визуализации получать калибровочные проекционные данные с помощью детектора (14) излучения, определяющего лицевую сторону (42) детектора, и в котором контроллер дополнительно выполнен с возможностью генерировать зерна размытия на основании полученных калибровочных проекционных данных.
9. Устройство по п.7, в котором устройство (10) визуализации содержит один из следующих элементов: (i) гамма-камеру, выполненную с возможностью осуществлять однофотонную эмиссионную компьютерную томографию (SPECT), (ii) сканер позитронной эмиссионной томографии (PET) или (iii) сканер трансмиссионной компьютерной томографии (СТ).
10. Устройство по любому из пп.1-6, в котором операция вычисления стационарных приращений зерен размытия, соответствующих приращениям лучей, пространственно зависит только от координаты у вдоль направления, перпендикулярного лицевой стороне (42) детектора и перпендикулярного плоскостям (Р0, P1, Р2, …PN), параллельным лицевой стороне детектора.
11. Способ реконструкции изображения, включающий в себя:
реконструкцию изображения с помощью итеративного способа реконструкции; и
вычисление проекции, используемой в реконструкции, посредством (i) вычисления приращений лучей между соседними плоскостями (Р0, P1, Р2, …PN), параллельными лицевой стороне (42) детектора (14), имеющего изменяющееся со смещением размытие, (ii) вычисления стационарных приращений зерен размытия между соседними плоскостями, параллельными лицевой стороне детектора, на основании расстояния между соседними параллельными плоскостями, (iii) пошагового суммирования приращений лучей, подвергнутых свертке с соответствующими стационарными зернами размытия для вычисления проекции, и (iv) корректировки проекции на изменяющееся со смещением размытие.
12. Способ реконструкции изображения по п.11, в котором вычисление проекции, используемой в реконструкции, включает в себя:
(i) вычисление приращений лучей IncAPn между соседними плоскостями (Р0, P1, Р2, …PN), параллельными лицевой стороне (42) детектора;
(ii) вычисление приращений зерен размытия IncSΩn между соседними плоскостями, параллельными лицевой стороне детектора, на основании расстояния между соседними параллельными плоскостями; и
(iii) пошаговое суммирование приращений лучей, подвергнутых свертке с соответствующими приращениями зерен размытия.
13. Способ реконструкции изображения по любому из пп.11-12, в котором корректировка (iv) включает в себя:
свертку с нестационарным зерном размытия в одной из выбранных соседних плоскостей (Р0, P1, Р2 …PN).
14. Процессор (26) реконструкции изображения, запрограммированный выполнять способ реконструкции изображения по любому из пп.11-13.
15. Носитель данных, на котором хранятся инструкции, исполняемые цифровым процессором (26) для выполнения способа реконструкции изображения по любому из пп.11-13.
| US 20080166063 A1, 10.07.2008 | |||
| US 20080028403 A1, 29.01.2009 | |||
| US 20060101106 A1, 11.05.2006 | |||
| US 20080037846 A1, 14.02.2008 | |||
| JP 20011250131 A, 14.09.2001 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ С НЕТОЧЕЧНЫМ ИСТОЧНИКОМ | 2006 |
|
RU2313780C1 |

