Область техники, к которой относится изобретение
Настоящее изобретение относится к векторным регуляторам для синхронных электродвигателей с постоянными магнитами.
Уровень техники
Технологии векторного управления для синхронных электродвигателей с постоянными магнитами (в дальнейшем называемых сокращенно электродвигателем) с использованием инвертора широко используют в промышленности. При раздельном регулировании величины и фазы выходного напряжения инвертора оптимально регулируется вектор тока электродвигателя, так что вращающий момент электродвигателя является малоинерционным и мгновенно регулируемым. Синхронные электродвигатели с постоянными магнитами известны как высокоэффективные электродвигатели по сравнению с асинхронными двигателями, поскольку не требуется ток возбуждения вследствие создания магнитного поля постоянным магнитом и не возникают вторичные потери в меди вследствие отсутствия тока ротора. По этой причине в последние годы проводятся исследования относительно применения синхронных электродвигателей с постоянными магнитами для электрических железнодорожных вагонов.
При применении синхронных электродвигателей с постоянными магнитами для электрических железнодорожных вагонов их снабжают регуляторами, чтобы реализовывать устойчивую работу с ослаблением поля до диапазона высоких скоростей и чтобы получать устойчивый переход к одноимпульсному режиму, в котором потери инвертора могут быть минимизированы, а напряжение, подводимое к электродвигателям, может быть максимально повышено. Одноимпульсный режим представляет собой режим работы инверторов, в котором выходные напряжения инвертора, как, например, его выходное линейное напряжение, представляют собой прямоугольные волны, имеющие положительные и отрицательные максимальные прямоугольные напряжения длительностью 120° каждое, которые повторяются одно за другим с периодом 60° нулевого напряжения между ними в течение одного цикла, то есть 360°.
Нижеследующий способ раскрыт в первом патентном документе, относящемся к предшествующему уровню техники. Предусмотрен блок установки напряжения, который принимает фиксированную команду напряжения и команду напряжения, вычисленную на основании команды тока. При вводе фиксированной команды напряжения с блока установки напряжения выводится команда напряжения в качестве новой команды напряжения с установкой ее величины заранее определенного установленного значения напряжения. Далее команда тока (по d-оси) направления магнитного поля корректируется с использованием корректирующего значения тока (по d-оси) направления магнитного поля, полученного путем осуществления пропорционально-интегрального регулирования разности между командой напряжения, вычисленной по команде тока и новой команды напряжения. Затем, чтобы управлять инвертором, коэффициент модуляции для инвертора вычисляется по команде напряжения, так что осуществляется работа с ослаблением поля.
Первый патентный документ: выложенная заявка №Н09-84399 на патент Японии (см. абзацы [0023]-[0029]).
Раскрытие изобретения
Однако в первом патентном документе, приведенном выше, не раскрыто создание фиксированной команды напряжения, а блок установки напряжения необходимо предусматривать заново. Кроме того, напряжение конденсатора всегда колеблется, так что максимальное напряжение, которое инвертор может выдавать, также соответственно колеблется. В соответствии со способом, раскрытым в первом патентном документе, для максимального повышения напряжения, подводимого к электродвигателю, необходимо изменять временную привязку создания фиксированной команды напряжения и изменять установленное значение напряжения в зависимости от колебания напряжения конденсатора, что включает в себя осуществление сложного регулирования.
Кроме того, в качестве корректирующего значения тока по d-оси направления поля используют значение, которое получают, осуществляя пропорционально-интегральное регулирование отклонения между командой напряжения, вычисленной на основании команды тока, и новой командой напряжения, величина которой устанавливается фиксированной командой напряжения. В соответствии с этим, когда отклонение между командой напряжения и новой командой напряжения не равно нулю, то есть во время ввода в пропорционально-интегральное регулирование оно остается ненулевым, операция регулирования непрерывно накапливает значение интегрирования. По этой причине, когда команде напряжения, теоретически вычисленной на основании команды тока, не может быть установлено меньшее значение, чем вновь установленная команда напряжения, например, когда команда вращающего момента является чрезмерно большой для скорости вращения электродвигателя, то, даже если ток направления магнитного поля корректируется с использованием корректирующего значения тока направления магнитного поля, разности между командой напряжения и вновь установленной командой напряжения не может быть установлено, нулевое значение, и значение интегрирования при пропорционально-интегральном регулировании непрерывно накапливается, так что корректирующее значение тока направления магнитного поля чрезмерно возрастает с ходом времени. Когда корректирующее значение тока направления магнитного поля становится чрезмерно большим, векторное регулирование не может нормально выполняться. Поэтому при практическом использовании необходима сложная операция, такая как ограничение значения интегрирования до меньшего значения, чем верхний предел, или при определенных условиях повторная установка значения интегрирования.
Настоящее изобретение создано для разрешения описанных выше проблем и обеспечивает векторный регулятор для синхронного электродвигателя с постоянными магнитами, который при упрощенной конфигурации может реализовывать устойчивое регулирование в одноимпульсном режиме с ослаблением поля в диапазоне высоких скоростей.
Средство для разрешения проблемы
Согласно настоящему изобретению векторный регулятор для синхронного электродвигателя с постоянными магнитами регулирует переменный ток от инвертора, который приводит в движение синхронный электродвигатель с постоянными магнитами, так, чтобы довести до совпадения с командой тока, и обеспечен блоком вычисления опорного фазового угла для создания опорного фазового угла синхронного электродвигателя с постоянными магнитами; блоком создания команды тока для создания команды тока с использованием заданной команды вращающего момента; блоком регулирования тока для производства контрольного вычисления погрешности тока между командой тока и током через синхронный электродвигатель с постоянными магнитами с выводом вычисленной погрешности тока; блоком вычисления развязывающего напряжения для вычисления упреждающего напряжения с использованием параметров двигателя синхронного электродвигателя с постоянными магнитами и команды тока; блоком вычисления коэффициента модуляции для вывода коэффициента модуляции для инвертора при приеме напряжения постоянного тока на инверторе и команды напряжения, которая является суммой погрешности тока и упреждающего напряжения; блоком вычисления регулирующего фазового угла для вывода регулирующего фазового угла для инвертора при приеме команды напряжения и опорного фазового угла; блоком создания сигнала с широтно-импульсной модуляцией для создания сигналов с широтно-импульсной модуляцией для инвертора с использованием коэффициента модуляции и регулирующего фазового угла; и компенсатором команды тока для коррекции команды тока с использованием скорректированной команды тока, вычисленной на основании коэффициента модуляции, при этом компенсатор команды тока устанавливает скорректированной команде тока значение, полученное путем обработки с помощью элемента временной задержки и путем умножения разности между коэффициентом модуляции и заранее определенным установленным значением коэффициента модуляции на заранее определенную постоянную.
Результаты изобретения
Согласно изобретению векторный регулятор для синхронного электродвигателя с постоянными магнитами регулирует переменный ток от инвертора, который приводит в движение синхронный электродвигатель с постоянными магнитами, так, чтобы довести до совпадения с командой тока, и обеспечен блоком вычисления опорного фазового угла для создания опорного фазового угла синхронного электродвигателя с постоянными магнитами; блоком создания команды тока для создания команды тока с использованием заданной команды вращающего момента; блоком регулирования тока для производства контрольного вычисления погрешности тока между командой тока и током через синхронный электродвигатель с постоянными магнитами с выводом вычисленной погрешности тока; блоком вычисления развязывающего напряжения для вычисления упреждающего напряжения с использованием параметров двигателя синхронного электродвигателя с постоянными магнитами и команды тока; блоком вычисления коэффициента модуляции для вывода коэффициента модуляции для инвертора при приеме напряжения постоянного тока на инверторе и команды напряжения, которая является суммой погрешности тока и упреждающего напряжения; блоком вычисления регулирующего фазового угла для вывода регулирующего фазового угла для инвертора при приеме команды напряжения и опорного фазового угла; блоком создания сигнала с широтно-импульсной модуляцией для создания сигналов с широтно-импульсной модуляцией для инвертора с использованием коэффициента модуляции и регулирующего фазового угла; и компенсатором команды тока для коррекции команды тока с использованием скорректированной команды тока, вычисленной на основании коэффициента модуляции, при этом компенсатор команды тока устанавливает скорректированной команде тока значение, полученное путем обработки с помощью элемента временной задержки и путем умножения разности между коэффициентом модуляции и заранее определенным заданным значением коэффициента модуляции на заранее определенную постоянную. Поэтому достигаемый результат заключается в том, что в случае упрощенной конфигурации можно реализовывать устойчивое регулирование в одноимпульсном режиме с ослаблением поля в диапазоне высоких частот скоростей.
Краткое описание чертежей
На чертежах:
фиг.1 - структурная схема, иллюстрирующая пример конфигурации векторного регулятора для синхронного электродвигателя с постоянными магнитами, согласно первому варианту осуществления настоящего изобретения;
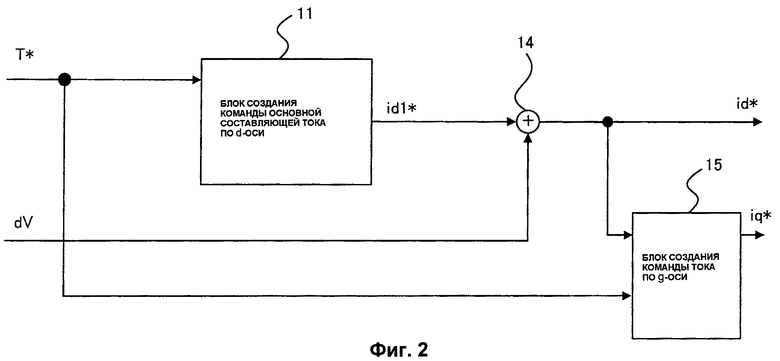
фиг.2 - структурная схема, иллюстрирующая пример конфигурации блока создания команды тока из первого варианта осуществления изобретения;
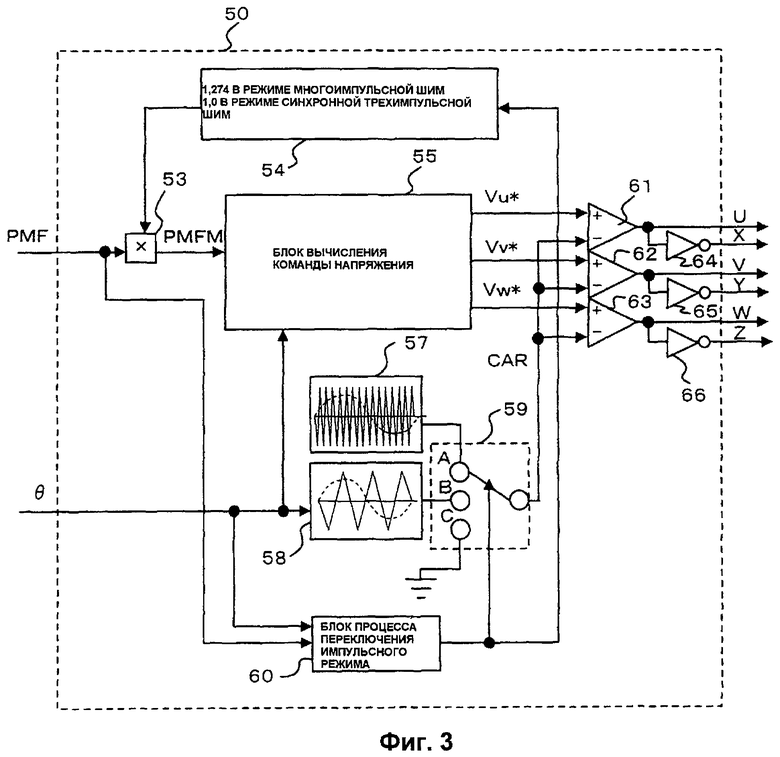
фиг.3 - структурная схема, иллюстрирующая пример конфигурации блока создания сигнала с широтно-импульсной модуляцией из первого варианта осуществления изобретения;
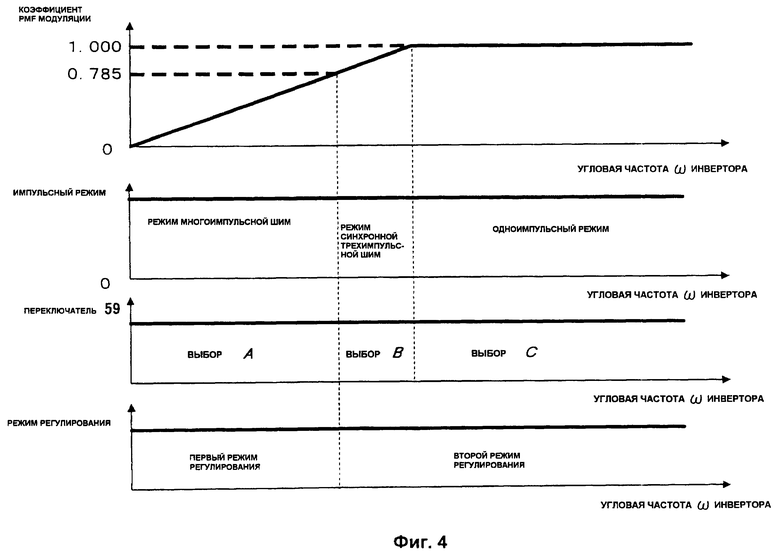
фиг.4 - диаграммы для иллюстрации коэффициента PMF модуляции, переходов импульсного режима, операций переключения и перехода режима регулирования, в зависимости от угловой частоты ω инвертора, согласно первому варианту осуществления изобретения;
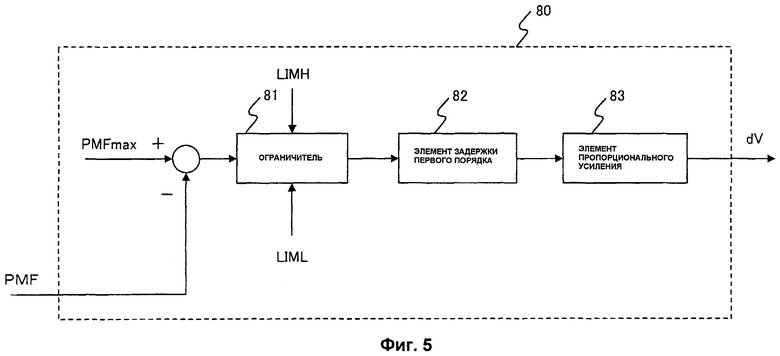
фиг.5 - структурная схема, иллюстрирующая пример конфигурации компенсатора команды тока из первого варианта осуществления изобретения;
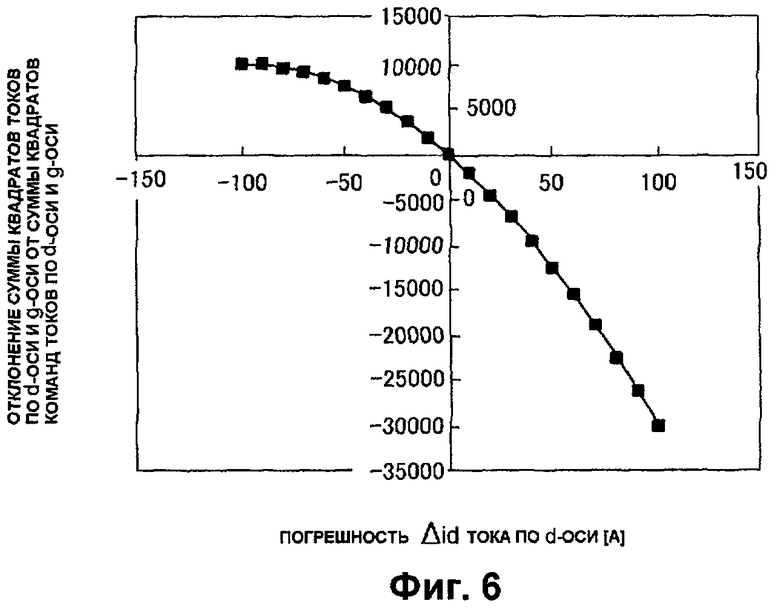
фиг.6 - график, иллюстрирующий зависимость отклонения между суммой квадратов команд тока по dq-осям и суммой квадратов токов по dq-осям от погрешности тока по d-оси, согласно первому варианту осуществления изобретения;
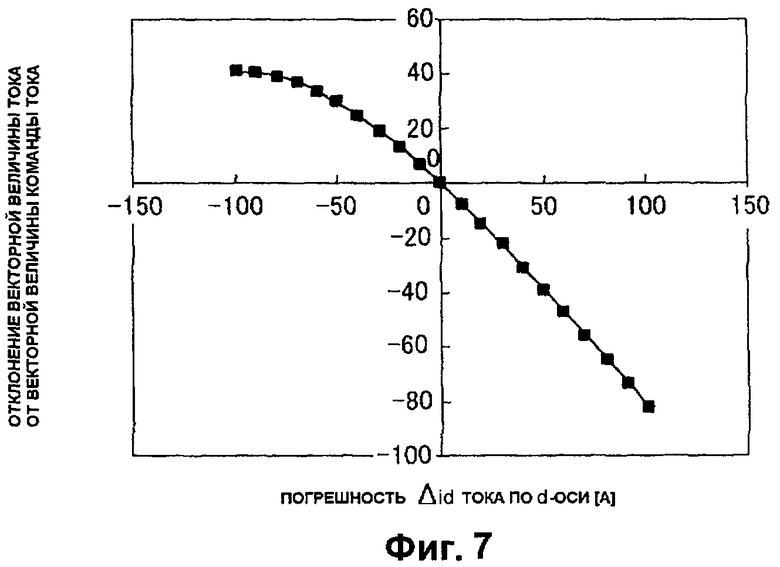
фиг.7 - график, иллюстрирующий зависимость отклонения между величиной векторов команды тока и величиной векторов тока от погрешности тока по d-оси, согласно первому варианту осуществления изобретения;
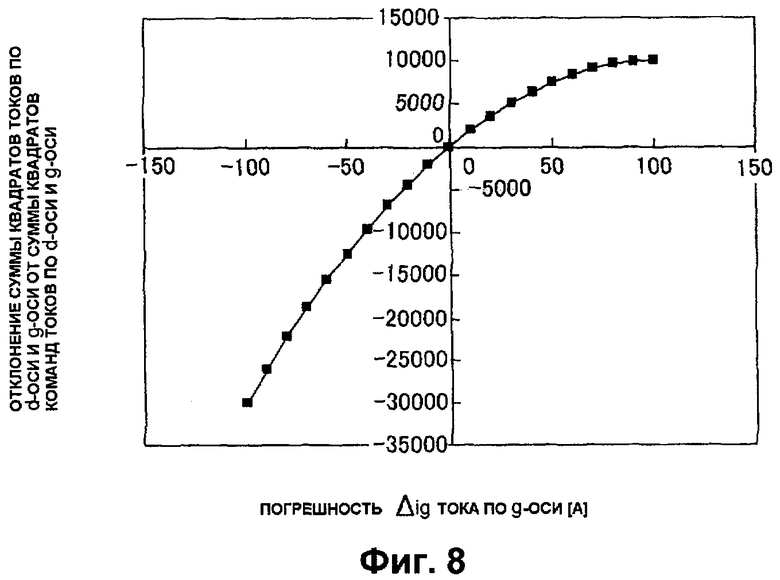
фиг.8 - график, иллюстрирующий зависимость отклонения между суммой квадратов команд тока по dq-осям и суммой квадратов тока по dq-осям от погрешности тока по q-оси, согласно первому варианту осуществления изобретения;
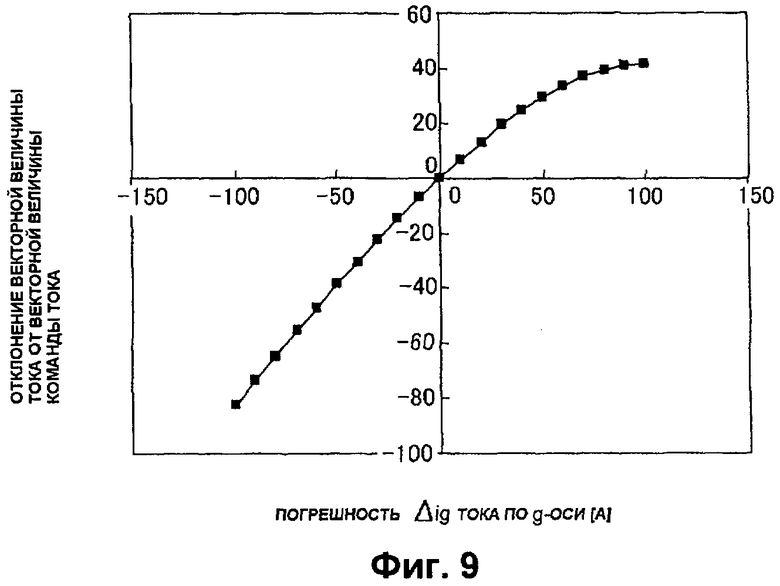
фиг.9 - график, иллюстрирующий зависимость отклонения между величиной векторов команд тока и величиной векторов тока от погрешности тока по q-оси, согласно первому варианту осуществления изобретения;
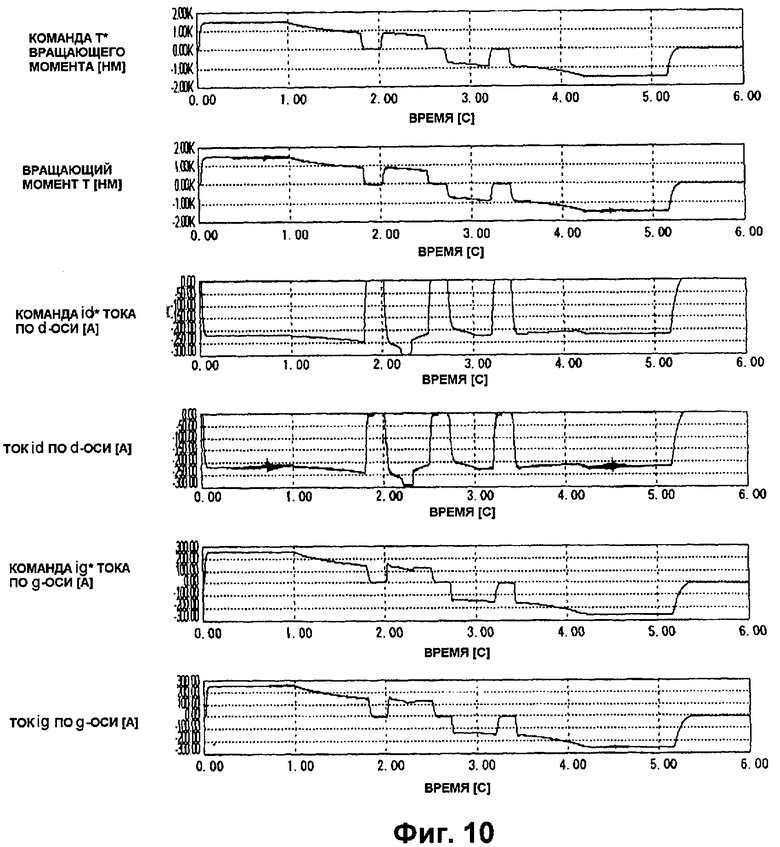
фиг.10 - графики, иллюстрирующие полученные моделированием рабочие формы волн сигналов команд вращающего момента, вращающих моментов, команд тока по d-оси, токов по d-оси, команд тока по q-оси и токов по q-оси, согласно первому варианту осуществления изобретения; и
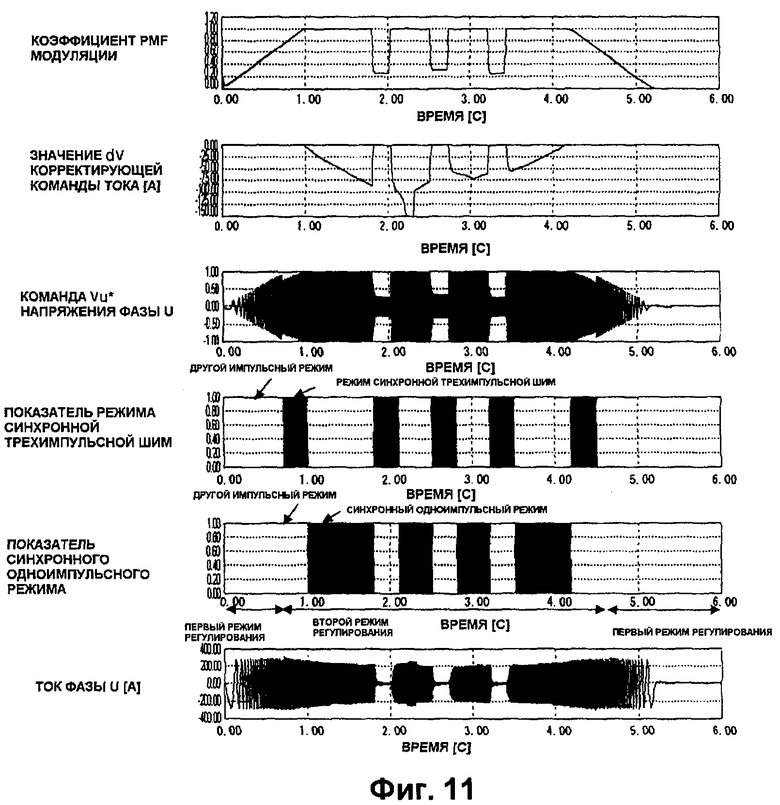
фиг.11 - графики, иллюстрирующие полученные моделированием рабочие формы волн сигналов коэффициентов модуляции, скорректированных команд тока, команд напряжения фазы U, показателей режима синхронной трехимпульсной широтно-импульсной модуляции и токов фазы U, согласно первому варианту осуществления изобретения.
Позиционные обозначения
1: конденсатор,
2: инвертор,
3, 4, 5: датчик тока,
6: электродвигатель,
7: круговой датчик положения,
8: датчик напряжения,
10: блок создания команды тока,
11: блок создания команды основной составляющей тока по d-оси,
14: сумматор,
15: блок создания команды тока по q-оси,
20: блок регулирования тока по d-оси,
21: блок вычисления развязки по q-оси (блок вычисления развязки),
22: блок вычисления развязки по d-оси (блок вычисления развязки),
23: блок регулирования тока по q-оси,
30: блок вычисления коэффициента модуляции,
40: блок вычисления регулирующего фазового угла,
50: блок создания сигнала с широтно-импульсной модуляцией,
53: мультипликатор,
54: таблица регулировки усиления,
55: блок вычисления команды напряжения,
57: блок создания многоимпульсного сигнала несущей частоты,
58: блок создания синхронного трехимпульсного сигнала несущей частоты,
59: переключатель,
60: блок процесса переключения импульсного режима,
61, 62, 63: компаратор,
64, 65, 66: логическая схема НЕ
70: блок вычисления угловой частоты инвертора,
80: компенсатор команды тока,
81: ограничитель,
82: элемент задержки первого порядка,
83: элемент пропорционального усиления,
85: блок коррекции отклонения параметра,
90: блок координатного преобразования трех фаз в dq-оси,
95: блок вычисления опорного фазового угла, и
100: векторный регулятор.
Лучший вариант осуществления изобретения
Первый вариант осуществления
На фиг.1 представлена структурная схема, иллюстрирующая пример конфигурации векторного регулятора для синхронного двигателя с постоянными магнитами согласно первому варианту осуществления настоящего изобретения. Как показано на фиг.1, основная схема выполнена с использованием конденсатора 1, который является источником энергии постоянного тока, инвертора 2, который преобразует напряжение постоянного тока конденсатора 1 в напряжение переменного тока любой заданной частоты, и синхронного электродвигателя 6 с постоянными магнитами (в дальнейшем называемого просто «электродвигателем»).
Основная схема также снабжена датчиком 8 напряжения, который воспринимает напряжение конденсатора 1, датчиками 3, 4 и 5 тока, которые воспринимают токи iu, iv и iw в выходных линиях инвертора 2. Электродвигатель 6 снабжен круговым датчиком 7 положения, который воспринимает механический угол θm ротора. Каждый из этих воспринимаемых сигналов вводится в векторный регулятор 100.
Круговой датчик 7 положения может быть заменен кодером, или может быть использован способ позиционирования без датчиков, в котором сигнал положения вычисляют на основании воспринимаемого напряжения, тока или тому подобного вместо сигнала положения, получаемого с помощью кругового датчика 7 положения. В этих случаях круговой датчик 7 положения не является необходимым, иначе говоря, получение сигнала положения не ограничено использованием кругового датчика 7 положения.
Что касается датчиков 3, 4 и 5 тока, то может быть использована конфигурация, в которой датчики предусмотрены для, по меньшей мере, двух фазных линий, поскольку ток в другой фазной линии может быть определен вычислением, или соответствующие токи определены путем моделирования выходных токов инвертора 2 по току на его стороне постоянного тока.
Инвертор 2 принимает отпирающие сигналы U, V, W и X, Y, Z, которые создаются векторным регулятором 100, чтобы осуществлять широтно-импульсное модуляционное управление переключающими элементами, встроенными в инвертор 2. Инвертор источника напряжения с широтно-импульсной модуляцией (ШИМ) пригоден для инвертора 2, и поскольку его конфигурация является общеизвестной, подробное описание его опускается.
Векторный регулятор 100 принимает команду Т* вращающего момента с внешнего регулятора, непоказанного, и управляет инвертором 2 так, чтобы вращающий момент Т, создаваемый электродвигателем 6, был доведен до совпадения с командой Т* вращающего момента.
Далее описывается конфигурация векторного регулятора 100. Векторный регулятор 100 выполнен с блоком 95 вычисления опорного фазового угла, который вычисляет опорный фазовый угол θе по механическому углу θm ротора; блоком 90 координатного преобразования трех фаз в dq-оси, который создает ток id по d-оси и ток iq по q-оси на основании трехфазных токов iu, iv и iw, воспринимаемых датчиками тока 3, 4 и 5, соответственно, и на основании опорного фазового угла θе; блоком 70 вычисления угловой частоты инвертора, который вычисляет угловую частоту ω инвертора на основании опорного фазового угла θе; блоком 10 создания команды тока, который создает команду id* тока по d-оси и команду iq* тока по q-оси на основании команды Т* вращающего момента, вводимой извне, и скорректированной команды dV* тока, описанной ниже, блоком 20 регулирования тока по d-оси, который создает погрешность pde тока по d-оси путем осуществления пропорционально-интегрального регулирования разности между командой id* тока по d-оси и током id по d-оси; блоком 23 регулирования тока по q-оси, который создает погрешность pqe тока по q-оси путем осуществления пропорционально-интегрального регулирования разности между командой iq* тока по q-оси и током iq по q-оси; блоком 21 вычисления развязки по q-оси, который вычисляет упреждающее напряжение VqFF по q-оси на основании команды id* тока по d-оси и угловой частоты ω инвертора; блоком 22 вычисления развязки по d-оси, который вычисляет упреждающее напряжение VdFF по d-оси на основании команды iq* тока по q-оси и угловой частоты ω инвертора; блоком 30 вычисления коэффициента модуляции, который вычисляет коэффициент PMF модуляции; блоком 40 вычисления регулирующего фазового угла, который вычисляет регулирующий фазовый угол θ на основании команды Vd* напряжения по d-оси, которая является суммой погрешности pde тока по d-оси и упреждающего напряжения VdFF по d-оси, команды Vq* напряжения по q-оси, которая является суммой погрешности pqe тока по q-оси и упреждающего напряжения VqFF по q-оси, опорного фазового угла θе и на основании корректирующего значения dTHV регулирующего фазового угла, описанного ниже; блоком 50 создания сигналов с ШИМ, который создает отпирающие сигналы U, V, W и X, Y, Z для инвертора 2; компенсатором 80 команды тока для вычисления скорректированной команды dV тока при приеме коэффициента PMF модуляции; и блоком 85 коррекции погрешности параметра, который вычисляет корректирующее значение dTHV регулирующего фазового угла на основании тока id по d-оси, тока iq по q-оси, команды id* тока по d-оси и команды iq* тока по q-оси.
В данном случае блок 30 вычисления коэффициента модуляции принимает команду Vd* напряжения по d-оси, которая является суммой погрешности pde тока по d-оси и упреждающего напряжения VdFF по d-оси, команду Vq* напряжения по q-оси, которая является суммой погрешности pqe тока по q-оси и упреждающего напряжения VqFF по q-оси, опорный фазовый угол θе и напряжение EFC конденсатора 1. Блок 50 создания сигналов с ШИМ принимает коэффициент PMF модуляции и регулирующий фазовый угол θ.
Далее будут описаны детальные конфигурации каждого из управляющих блоков, упомянутых выше. По механическому углу θm ротора блок 95 вычисления опорного фазового угла вычисляет опорный фазовый угол θе, то есть электрический угол, исходя из следующего уравнения (1):

где РР обозначает число пар полюсов электродвигателя 6.
Блок 90 координатного преобразования трех фаз в dq-оси создает ток id по d-оси и ток iq по q-оси на основании трехфазных токов iu, iv и iw и опорного фазового угла θе, исходя из следующего уравнения (2):

Блок 70 вычисления угловой частоты инвертора вычисляет угловую частоту ω инвертора путем дифференцирования опорного фазового угла θе, исходя из следующего уравнения (3):

Описывается конфигурация блока 10 создания команды тока. На фиг.2 представлена структурная схема, иллюстрирующая пример конфигурации блока 10 создания команд тока, согласно первому варианту осуществления изобретения. Блок 11 создания команды основной составляющей тока по d-оси принимает команду Т* вращающего момента, чтобы создать команду id1* основной составляющей тока по d-оси. Способ регулирования максимального вращающего момента, с помощью которого можно создавать желаемый вращающий момент электродвигателя 6 при минимальном токе, известен как способ создания команды id1* основной составляющей тока по d-оси, в котором оптимальную команду id1* основной составляющей тока по d-оси получают привязкой координат на основании команды Т* вращающего момента или путем использования арифметического выражения. Поскольку блок может быть выполнен известным из уровня техники способом, подробное описание блока в настоящей заявке опущено.
Затем после создания команды id1* основной составляющей тока по d-оси с помощью сумматора 14 получают команду id* тока по d-оси путем суммирования скорректированной команды dV тока с командой id1* основной составляющей тока по d-оси. Скорректированную команду dV тока получают для так называемого управления с ослаблением поля. Корректирующее значение dV имеет отрицательное значение при коррекции значения id1* в отрицательном направлении, так что команда id* тока по d-оси возрастает в отрицательном направлении; в результате этого магнитное поле создается в таком направлении, что подавляет магнитное поле, образуемое постоянным магнитом электродвигателя 6, так что потокосцепление электродвигателя 6 ослабляется, то есть реализуется управление с ослаблением поля. Поскольку способ создания скорректированной команды dV тока является ключевой особенностью изобретения, он будет описан ниже.
Наконец, команда iq* тока по q-оси создается блоком 15 создания команды тока по q-оси на основании команды id* тока по d-оси и значения Т* команды вращающего момента. Что касается способа создания команды тока по q-оси, то также имеется способ, в котором оптимальную команду iq* тока по q-оси получают, как упоминалось выше, привязкой координат или путем использования арифметического выражения. Поскольку блок создания может быть выполнен известным из уровня техники способом, подробное описание блока в настоящей заявке опущено.
Блок 23 регулирования тока по q-оси и блок 20 регулирования тока по d-оси создают погрешность pqe тока по q-оси и погрешность pde тока по d-оси, получаемые с помощью пропорционально-интегрального усиления разностей между командой iq* тока по q-оси и током по q-оси и между командой id* тока по d-оси и током по d-оси, исходя из следующих уравнений (4) и (5), соответственно:


где K1 и K3 - пропорциональные коэффициенты усиления, а K2 и K4 - интегральные коэффициенты усиления.
Как описано ниже, погрешность pqe тока по q-оси и погрешность pde тока по d-оси постепенно снижаются до нуля после перехода из первого режима регулирования (описанного ниже) ко второму режиму регулирования (описанному ниже) и наоборот, постепенно возрастают, когда производится переход из второго режима регулирования к первому режиму регулирования.
Блок 22 вычисления развязки по d-оси и блок 21 вычисления развязки по q-оси, которые являются блоками, вычисляющими развязывающие напряжения, вычисляют упреждающее напряжение VdFF по d-оси и упреждающее напряжение VqFF по q-оси, исходя из следующих уравнений (6) и (7), соответственно:


где R1 обозначает сопротивление (Ом) первичной обмотки, Ld и Lq обозначают индуктивность (Гн) по d-оси и индуктивность (Гн) по q-оси, соответственно, ϕа - магнитный поток (Вб) постоянного магнита и s - дифференциальный оператор.
В настоящей заявке коэффициент PMF модуляции означает отношение командной векторной величины VM* выходного напряжения для инвертора к максимальному напряжению VMmax, которое инвертор способен выдать, и PMF=1,0 указывает на то, что командная векторная величина VM* выходного напряжения равна максимальному напряжению VMmax.
При таком определении коэффициента PMF модуляции коэффициент PMF модуляции становится нулевым, когда командная векторная величина VM* выходного напряжения равна нулю, и становится 1,0 при условии, что инвертор выдает максимальное напряжение. Вследствие этого отношение на выходе инвертора легко обнаружить интуитивно, что дает преимущество, благодаря которому легко конструировать и устанавливать процессы управления, которые имеют отношение к коэффициенту PMF модуляции, например, описанные ниже процессы переключения импульсных режимов и режимов управления.
Согласно упомянутому ранее определению коэффициента PMF модуляции блок 30 вычисления коэффициента модуляции вычисляет коэффициент PMF модуляции на основании команды Vd* напряжения по d-оси, которая является суммой погрешности pde тока по d-оси и упреждающего напряжения VdFF по d-оси, команды Vq* напряжения по q-оси, которая является суммой погрешности pqe тока по q-оси и упреждающего напряжения VqFF по q-оси, опорного фазового угла θе и напряжения EFC конденсатора 1, исходя из следующего уравнения (8):

где


Блок 40 вычисления регулирующего фазового угла вычисляет регулирующий фазовый угол (на основании команды Vd* напряжения по d-оси, которая является суммой погрешности pde тока по d-оси и упреждающего напряжения VdFF по d-оси, команды Vq* напряжения по q-оси, которая является суммой погрешности pqe тока по q-оси и упреждающего напряжения VqFF по q-оси, опорного фазового угла θе и корректирующего значения dTHV регулирующего фазового угла, исходя из следующего уравнения (11):

где

Далее описывается конфигурация блока 50 создания сигналов с ШИМ. На фиг.3 представлена структурная схема, иллюстрирующая пример конфигурации блока 50 создания сигналов с ШИМ согласно первому варианту осуществления изобретения. Как показано на фиг.3, блок 55 создания командного напряжения создает на основании коэффициента PMF модуляции и регулирующего фазового угла (значение Vu* командного напряжения фазы U, значение Vv* командного напряжения фазы V и значение Vw* командного напряжения фазы W, которые являются командными трехфазными напряжениями, исходя из следующих уравнений с (13) по (15):



В данном случае коэффициент PMFM представляет собой амплитуду команды напряжения, полученную путем умножения коэффициента PMF модуляции на выходной сигнал таблицы 54 регулировки усиления с помощью мультипликатора 53. Таблица 54 регулировки усиления предназначена для коррекции разности между отношением выходного напряжения VM инвертора к коэффициенту PMF модуляции в режиме многоимпульсной ШИМ и тем же отношением в режиме синхронной трехимпульсной ШИМ. Коррекция изложена ниже.
Максимальное напряжение (среднеквадратичное значение), которое инвертор может выдавать без искажения, равно 0,612·EFC в режиме многоимпульсной ШИМ и составляет VMmax(=0,7797·EFC) в режиме синхронной трехимпульсной ШИМ. А именно, выходное напряжение инвертора для коэффициента PMF модуляции в режиме многоимпульсной ШИМ становится 1/1,274 по сравнению с напряжением в режиме синхронной трехимпульсной ШИМ. Для компенсации разницы коэффициент PMF модуляции в режиме многоимпульсной ШИМ умножается на 1,274, чтобы вывести выходной сигнал в виде амплитуды PMFM командного напряжения в упомянутый выше блок 55 вычисления команды напряжения.
Далее значение Vu* напряжения команды фазы U, значение Vv* напряжения команды фазы V и значение Vw* напряжения команды фазы W сравниваются по величине с сигналами CAR несущей частоты с помощью компараторов 61, 62 и 63, так что создаются отпирающие сигналы U, V и W, соответственно. Кроме того, на основании отпирающих сигналов U, V и W с помощью логических схем НЕ, 64, 65 и 66, соответственно, создаются отпирающие сигналы X, Y и Z. Сигналы CAR несущей частоты представляют собой сигналы, каждый из которых выбирается переключателем 59 с помощью блока 60 переключения процесса импульсного режима из числа многоимпульсного сигнала А несущей частоты (обычно около 1 кГц), создаваемого в блоке 57 создания многоимпульсного сигнала несущей частоты, синхронного трехимпульсного сигнала В несущей частоты, создаваемого в блоке 58 создания синхронного трехимпульсного сигнала несущей частоты, и нулевого значения С, используемого в одноимпульсном режиме. Каждый из многоимпульсного сигнала А несущей частоты и синхронного трехимпульсного сигнала В несущей частоты принимает значения в пределах от -1,0 до 1,0, центрированные около нуля.
Кроме того, в зависимости от коэффициента PMF модуляции и регулирующего фазового угла θ блок 60 процесса переключения импульсного режима меняет переключатель 59 со стороны асинхронной несущей А частоты, когда коэффициент PMF модуляции находится в диапазоне небольших значений (равен или меньше чем 0,785), к синхронной трехимпульсной несущей В частоте, когда он находится в диапазоне от 0,785 до меньше чем 1,0, и к нулевому значению С, когда он достигает 1,0, соответственно.
Такая конфигурация позволяет автоматически осуществлять изменение импульсного режима к одноимпульсному режиму в момент времени, когда коэффициент PMF модуляции равен 1,0, и наоборот, автоматически осуществлять изменение к синхронному трехимпульсному режиму, когда коэффициент PMF модуляции становится ниже 1,0. То есть можно легко изменять выходное напряжение инвертора 2 от минимального до максимального.
Хотя порог для коэффициента PMF модуляции установлен в значение 0,785, при котором осуществляется переключение асинхронной несущей частоты и синхронной трехимпульсной несущей частоты, порог может быть ниже этого значения.
Упоминаемый в настоящей заявке режим синхронной трехимпульсной ШИМ относится к импульсному режиму, необходимому для вывода напряжения, соответствующего коэффициенту PMF модуляции, равному или большему чем 0,785, и это напряжение невозможно вывести в режиме многоимпульсной ШИМ. Хотя такое напряжение, соответствующее синхронному трехимпульсному режиму, также может быть выведено при использовании такой конфигурации, в которой способ перемодуляции применяется в режиме многоимпульсной ШИМ, синхронном пятиимпульсном режиме, синхронном девятиимпульсном режиме или подобном, выходной сигнал инвертора 2 становится существенно нелинейным в зависимости от коэффициента PMF модуляции, который необходимо повышать для коррекции нелинейности, что делает конфигурацию сложной.
Каждое из расчетных уравнений, показанных выше, обычно обрабатывается микрокомпьютером с использованием программного обеспечения. Однако, когда вычисления производятся с низкой точностью (с небольшим числом единиц), для уменьшения вычислительной нагрузки на микрокомпьютер коэффициент PMF модуляции может не достигать точно 1,0, а может иметь меньшее значение, например 0,999, в момент времени, когда командная векторная величина VM* выходного напряжения для инвертора становится максимальным напряжением VMmax. В этом случае, хотя это влечет за собой некоторый скачок напряжения, практически возможно, чтобы импульсный режим изменялся к одноимпульсному режиму, когда коэффициент PMF модуляции становится, например, 0,95 или больше.
Кроме того, момент изменения импульсного режима можно плавно регулировать, используя регулирующий фазовый угол θ. Путем тонкой регулировки может быть предотвращена пульсация тока через электродвигатель при изменении импульсного режима.
На фиг.4 показаны диаграммы для иллюстрации коэффициента PMF модуляции, переходов через импульсные режимы, работы переключателя 59 и перехода через режимы регулирования в зависимости от угловой частоты ω инвертора, согласно варианту осуществления изобретения. Как показано на фиг.4, когда электрические железнодорожные вагоны движутся с небольшой скоростью, то есть угловая частота ω инвертора является низкой, коэффициент PMF модуляции небольшой, и переключателем 59 выбрана сторона А, то есть в качестве импульсного режима устанавливается режим многоимпульсной ШИМ. Наряду с этим в качестве режима регулирования устанавливается первый режим регулирования, и блок 23 регулирования тока по q-оси и блок 20 регулирования тока по d-оси работают в соответствии с приведенными выше уравнениями (4) и (5), соответственно. Когда при повышении скорости электрического железнодорожного вагона коэффициент PMF модуляции равен 0,785 или больше, то, поскольку выходное напряжение инвертора 2 становится предельным в режиме многоимпульсной ШИМ, переключатель 59 изменяет положение на сторону В для установки импульсного режима, соответствующего режиму синхронной трехимпульсной ШИМ.
Наряду с этим в качестве режима регулирования выбирается второй режим регулирования, и блок 20 регулирования тока по d-оси и блок 23 регулирования тока по q-оси прекращают вычисления, так что их выходные сигналы снижаются до нуля. Причина снижения до нуля заключается в следующем. Число импульсов на каждую половину цикла выходного напряжения инвертора уменьшается с десяти или более в режиме многоимпульсной ШИМ до трех в режиме синхронной трехимпульсной ШИМ, так что задержка регулирования возрастает. В случае если блок 20 регулирования тока по d-оси и блок 23 регулирования тока по q-оси продолжают вычисления, возникает возможность, что система управления станет нестабильной. Поэтому блок 20 регулирования тока по d-оси и блок 23 регулирования тока по q-оси прекращают производить вычисления.
Кроме того, для исключения ударного воздействия, создаваемого изменением режима, предпочтительно, чтобы во время процесса восстановления выходные сигналы блока 20 регулирования тока по d-оси и блока 23 регулирования тока по q-оси постепенно снижались к нулю с заранее определенной постоянной времени.
Во втором режиме регулирования рассогласование между параметрами электродвигателя и параметрами регулирования возникает в результате прекращения вычислений блоком 20 регулирования тока по d-оси и блоком 23 регулирования тока по q-оси. В результате этого рассогласования и т.п.образуются отклонения вращающего момента и тока через электродвигатель 6 от их командных значений. Погрешности регулирования, например отклонения, могут быть исключены коррекцией регулирующего фазового угла θ с использованием корректирующего значения dTHV регулирующего фазового угла, создаваемого блоком 85 коррекции погрешности параметра с использованием тока id по d-оси, тока iq по q-оси, команды id* тока по d-оси и команды iq* тока по q-оси. Детальная конфигурация блока 85 коррекции погрешности параметра будет описана ниже.
Кроме того, выходной сигнал блока 85 коррекции погрешности параметра возрастает после изменения от первого режима регулирования ко второму режиму регулирования, и наоборот, снижается до нуля после изменения из второго режима регулирования к первому режиму регулирования. Предпочтительно, чтобы возрастание и снижение осуществлялись медленно с заранее определенной постоянной времени. Тем самым будет исключаться неустойчивое регулирование, являющееся результатом конкуренции выходного сигнала блока 20 регулирования тока по d-оси или блока 23 регулирования тока по q-оси с выходным сигналом блока 85 коррекции погрешности параметра.
Когда коэффициент PMF модуляции становится равным 1,0 или большим при дополнительном возрастании скорости электрического железнодорожного вагона, импульсный режим изменяется к одноимпульсному режиму путем изменения переключателя 59 на положение к стороне С. Режимом регулирования все еще остается второй режим регулирования. Когда электрический железнодорожный вагон замедляется с помощью рекуперативных тормозов, которые не показаны, осуществляется переход импульсного режима от одноимпульсного режима к режиму многоимпульсной ШИМ через режим синхронной трехимпульсной ШИМ, и переключатель 59 изменяет положение со стороны С к стороне А через сторону В в последовательности, обратной указанной выше, так что режим регулирования переходит от второго режима регулирования к первому режиму регулирования.
Далее выполняется описание конфигурации компенсатора 80 команды тока, который является ключевым компонентом для демонстрации результатов изобретения. На фиг.5 представлена структурная схема, иллюстрирующая пример конфигурации компенсатора 80 команды тока согласно первому варианту осуществления изобретения. Как показано на фиг.5, разность между установленным значением PMFmax коэффициента модуляции и коэффициентом PMF модуляции вводится в ограничитель 81, который может ограничивать разность до диапазона между верхним пределом и нижним пределом. Ограничитель 81 выполнен так, что может ограничивать входной сигнал в диапазоне между установленным значением LIMH верхнего предела отклонения и установленным значением LIML нижнего предела отклонения с выводом ограниченного сигнала. Выходной сигнал ограничителя 81 вводится в элемент 82 задержки первого порядка. Выходной сигнал элемента 82 задержки первого порядка вводится в элемент 83 пропорционального усиления и умножается на коэффициент K усиления, который является заранее определенным коэффициентом, с выводом скорректированной команды dV тока. При наличии элемента 82 задержки первого порядка, даже если разность между установленным значением PMFmax коэффициента модуляции и коэффициентом PMF модуляции быстро повышается, скорректированная команда dV тока возрастает с заранее определенной постоянной времени.
Как описывалось выше, скорректированная команда dV тока выражается следующим уравнением (16):

где LIMHL() обозначает функцию, которая ограничивает значение в скобках диапазоном между установленным значением LIMH верхнего предела отклонения и установленным значением LIML нижнего предела отклонения, и τ обозначает постоянную времени задержки первого порядка. Постоянная τ времени составляет по порядку величины от 10 мс до 100 мс.
Предпочтительные установки установленного значения PMFmax коэффициента модуляции, установленного значения LIMH верхнего предела отклонения и установленного значения LIML нижнего предела отклонения согласно варианту осуществления являются следующими. Установленное значение PMFmax коэффициента модуляции предпочтительно устанавливают равным 1,0. Это потому, что в момент времени, когда коэффициент PMF модуляции достигает 1,0, то есть выходное напряжение инвертора 2 достигает максимального напряжения, входной сигнал ограничителя 81 становится нулевым или меньшим, вследствие чего может быть создана отрицательная скорректированная команда dV тока, которая является предпочтительной для осуществления управления с ослабленным полем, и в то же время выходное напряжение инвертора 2 является максимальным.
Установленному значению LIMH верхнего предела отклонения предпочтительно устанавливают значение, которое получается при делении на коэффициент K усиления максимального тока Idmax по d-оси (известного как «максимальный ток ослабления поля»), который вычисляется заранее, требуемое для протекания через электродвигатель 6 при формировании команды Т* желаемого вращающего момента с учетом диапазона колебания напряжения EFC конденсатора. Например, когда максимальный ток Idmax по d-оси составляет 100 А и коэффициент K усиления установлен 100000, установленное значение LIMH верхнего предела отклонения становится 0,001. Установленное значение LIML нижнего предела отклонения предпочтительно устанавливают равным нулю. При таких установках установленных значений, когда коэффициент PMF модуляции равен 1,0 или меньше, то есть когда существует различие между командой напряжения и максимальным выходным напряжением инвертора 2, скорректированная команда dV тока не выводится. В момент времени, когда коэффициент PMF модуляции превышает 1,0, то есть когда команда напряжения несколько превышает максимальное выходное напряжение инвертора 2, ограничитель 81 создает отрицательное выходное значение, так что выводится скорректированная команда dV тока. Поэтому нет необходимости в том, чтобы протекал ток id по d-оси, что позволяет минимизировать ток через электродвигатель 6.
При таком создании скорректированной команды dV тока на основании коэффициента PMF модуляции, то есть значения, полученного нормированием величины командного вектора выходного напряжения для инвертора по напряжению EFC конденсатора 1, соответствующую скорректированную команду dV тока можно получать независимо от величины напряжения EFC конденсатора 1, но в зависимости от избыточного отношения командной векторной величины выходного напряжения для инвертора к максимальному напряжению, которое инвертор 2 может выдать. В соответствии с этим можно получать устойчивую работу применительно к электрическим железнодорожным вагонам, когда напряжение EFC конденсатора 1 колеблется.
Кроме того, при создании скорректированной команды dV тока с использованием сочетания элемента 83 пропорционального усиления и элемента 82 задержки первого порядка устойчивая работа может осуществляться даже в случае, когда электрический двигатель 6 попадает в рабочий диапазон, где управление с ослаблением поля теоретически неприменимо, например, когда команда Т* вращающего момента является чрезмерной для скорости вращения электродвигателя 6. В такой ситуации, даже если команда id* тока по d-оси корректируется до отрицательной с помощью скорректированной команды dV тока, величина командного вектора выходного напряжения для инвертора не может быть снижена в соответствии с максимальным напряжением или меньшим, которое инвертор может выдавать. А именно при наличии сочетания элемента 83 пропорционального усиления и элемента 82 задержки первого порядка, даже в ситуации, когда коэффициент PMF модуляции остается больше 1,0, в конфигурации изобретения конечное значение скорректированной команды dV тока никогда не продолжит возрастать до предельно большого значения, поскольку корректирующее значение dV приходит к соответствующему значению, определяемому на основании коэффициента PMF модуляции, установленного значения LIMH верхнего предела отклонения и коэффициента K усиления. Иначе говоря, даже когда команда Т* вращающего момента является завышенной, соответствующее управление с ослаблением поля может осуществляться.
В случае конфигурации, выполненной с пропорционально-интегральным регулятором, имеющим интегральный элемент, показанный в примерах известных конфигураций, вместо упомянутого выше сочетания коэффициента K усиления и элемента 82 задержки первого порядка, когда коэффициент PMF модуляции остается больше 1,0, значение интегрирования накапливается в интегральном элементе, и скорректированная команда dV тока продолжает возрастать до предельно большого значения по мере протекания времени, так что электродвигатель 6 не может управляться надлежащим образом. Кроме того, даже когда двигатель возвращается из такого неуправляемого состояния к нормальному состоянию, затрачивается время на снижение чрезмерно накопленного значения интегрирования до надлежащего значения, что приводит к плохому управлению во время этого переходного периода. По этой причине при практической эксплуатации требуется сложная операция, например, установка верхнего предела для значения интегрирования или сброс значения интегрирования в заранее определенный момент времени.
Напротив, согласно изобретению для осуществления стабильного управления с ослаблением поля сложная операция не требуется.
Далее описывается конфигурация блока 85 коррекции погрешности параметра, который является ключевым компонентом для демонстрации результатов изобретения. Блок 85 коррекции погрешности параметра вычисляет корректирующее значение dTHV регулирующего фазового угла на основании тока id по d-оси, тока iq по q-оси, команды id* тока по d-оси и команды iq* тока по q-оси, исходя из следующего уравнения (17):

где K5 и K6 обозначают пропорциональный коэффициент усиления и интегральный коэффициент усиления, соответственно, при этом блок коррекции работает как пропорционально-интегральный регулятор.
Первый член в правой части уравнения (17) выражает сумму квадратов команды id* тока по d-оси и команды iq* тока по q-оси и обозначает квадрат величины командного вектора тока. Второй член в правой части выражает сумму квадратов тока id по d-оси и тока iq по q-оси и обозначает квадрат величины вектора тока.
Ток id по d-оси и ток iq по q-оси, которые являются токами электродвигателя, иногда могут отклоняться от команды id* тока по d-оси и команды iq* тока по q-оси, которые являются командами тока, соответственно, при изменении потока ϕа постоянных магнитов и изменении параметров электродвигателя вследствие возрастания температуры и тока через электродвигатель. В этом случае путем вычитания квадрата величины вектора тока из квадрата командной величины вектора тока и осуществления пропорционально-интегрального регулирования результата вычитания регулирующий фазовый угол θ корректируют, используя корректирующее значение dTHV регулирующего фазового угла, соответствующее отклонению. При этом операцию можно выполнить так, что ток электродвигателя совпадет с командой тока, и это позволит предотвратить отклонение вращающего момента Т электродвигателя 6 от команды Т* вращающего момента.
Вместо использования уравнения (17) корректирующее значение dTHV регулирующего фазового угла можно вычислять, используя уравнение (18):

Первый член в правой части уравнения (18) выражает квадратный корень из суммы квадратов команды id* тока по d-оси и команды iq* тока по q-оси и обозначает величину командного вектора тока. Второй член в правой части выражает квадратный корень из суммы квадратов тока id по d-оси и тока iq по q-оси и обозначает величину вектора тока.
Ток id по d-оси и ток iq по q-оси, которые являются токами электродвигателя, могут иногда отклоняться от команды id* тока по d-оси и команды iq* тока по q-оси, которые являются командами тока, соответственно, при изменении потока ϕа постоянных магнитов и изменении параметров электродвигателя вследствие возрастания температуры и тока через электродвигатель. В этом случае путем вычитания величины вектора тока из командной величины вектора тока и осуществления пропорционально-интегрального регулирования результата вычитания, регулирующий фазовый угол θ корректируют, используя корректирующее значение dTHV регулирующего фазового угла, соответствующее отклонению. При этом операцию можно выполнить так, что ток электродвигателя совпадет с командой тока, и это позволит предотвратить отклонение вращающего момента Т электродвигателя 6 от команды Т* вращающего момента.
Кроме того, поскольку уравнение (18) является сложным уравнением по сравнению с уравнением (17) вследствие включения в него двух операций с квадратными корнями, вычисление требует времени и представляет собой значительную нагрузку на микрокомпьютер. В соответствии с этим предпочтительно использовать уравнение (17).
Различие между корректирующим значением dTHV регулирующего фазового угла, вычисляемым с использованием уравнения (17), и значением, вычисляемым с использованием уравнения (18), поясняется ниже. На фиг.6 представлен график, иллюстрирующий зависимость (полученную с использованием уравнения (17)) отклонения между суммой квадратов команд токов по dq-осям и суммой квадратов токов по dq-осям от погрешности тока по d-оси, согласно первому варианту осуществления изобретения. На фиг.7 представлен график, иллюстрирующий зависимость (полученную с использованием уравнения (18)) отклонения между величиной командного вектора тока и величиной вектора тока от погрешности тока по d-оси, согласно первому варианту осуществления изобретения. На фиг.8 представлен график, иллюстрирующий зависимость (полученную с использованием уравнения (17)) отклонения между суммой квадратов команд токов по dq-осям и суммой квадратов токов по dq-осям от погрешности тока по q-оси, согласно первому варианту осуществления изобретения. На фиг.9 представлен график, иллюстрирующий зависимость (полученную с использованием уравнения (18)) отклонения между величиной командного вектора тока и величиной вектора тока от погрешности тока по q-оси, согласно первому варианту осуществления изобретения.
На фигурах 6 и 7 соответственно показаны отношение отклонения (вертикальная ось) суммы квадратов токов по dq-осям от суммы квадратов команд токов по dq-осям и отношение отклонения (вертикальная ось) величины вектора тока от командной величины вектора тока в зависимости от погрешности Δid (горизонтальная ось) тока по d-оси, когда существует погрешность между током id по d-оси и командой id* тока по d-оси в ситуации равенства тока iq по q-оси и команды iq* тока по q-оси, то есть в ситуации равенства нулю погрешности тока по q-оси. В данном случае погрешность Δid тока по d-оси означает вычитание тока id по d-оси из команды id* тока по d-оси.
Из показанного на фигурах 6 и 7 установлено, что оба отклонения имеют аналогичную характеристику, так что они являются по существу линейными относительно погрешности Δid тока по d-оси в небольшом диапазоне (в пределах ±50 А), хотя вертикальные шкалы являются различными. Кроме того, различие вертикальных шкал является несущественным, поскольку его можно отрегулировать с помощью коэффициента K5 усиления в уравнении (17).
На фигурах 8 и 9 соответственно показаны отношение отклонения (вертикальная ось) суммы квадратов токов по dq-осям от суммы квадратов команд токов по dq-осям и отношение отклонения (вертикальная ось) величины вектора тока от командной величины вектора тока в зависимости от погрешности Δiq (горизонтальная ось) тока по q-оси, когда существует погрешность между током iq по q-оси и командой iq* тока по q-оси в ситуации равенства тока id по d-оси и команды id* тока по d-оси, то есть в ситуации равенства нулю погрешности тока по d-оси. В данном случае погрешность Δiq тока по q-оси означает вычитание команды iq* тока по q-оси из тока iq по q-оси.
Из показанного на фигурах 8 и 9 установлено, что оба отклонения имеют аналогичную характеристику, так что отклонения являются по существу линейными относительно погрешности Δiq тока по q-оси в небольшом диапазоне (в пределах ±50 А), хотя вертикальные шкалы являются различными. Кроме того, различие вертикальных шкал является несущественным, поскольку его можно скорректировать с помощью коэффициента K5 усиления в уравнении (17).
Как описывалось выше, путем использования уравнения (17) корректирующее значение dTHV регулирующего фазового угла можно вычислять без увеличения продолжительности времени вычислений и без значительной нагрузки на микрокомпьютер.
На фигурах 10 и 11 показаны графики, иллюстрирующие полученные моделированием рабочие формы волн сигнала согласно первому варианту осуществления изобретения. На фиг.10 показаны полученные моделированием рабочие формы волн сигнала команд вращающего момента, вращающих моментов, команд тока по d-оси, токов по d-оси, команд тока по q-оси и токов по q-оси, а на фиг.11 полученные моделированием рабочие формы волн сигнала коэффициентов модуляции, скорректированных команд тока, команд напряжения фазы U, показателей режима синхронной трехимпульсной ШИМ, показателей синхронного одноимпульсного режима и тока фазы U. Из показанного на фигурах 10 и 11 установлено, что устойчивая работа достигается в продолжение работы под нагрузкой (в течение временного интервала от 0 с до 2,5 с) и рекуперативной работы (в течение временного интервала от 2,7 с до 5,3 с), что подробно описывается ниже.
В течение периода времени от 0 с и до около 0,7 с напряжение, приложенное к электродвигателю 6, и также коэффициент PMF модуляции возрастают линейно, и выбираются режим многоимпульсной ШИМ (показатель режима на чертежах не показан) и первый режим регулирования.
Поскольку коэффициент PMF модуляции равен заранее определенному значению или превышает его в момент времени около 0,7 с, то выбираются режим синхронной трехимпульсной ШИМ и второй режим регулирования. В течение периода времени от около 0,7 с до около 1,0 с коэффициент PMF модуляции дополнительно возрастает линейно, но его величина меньше 1,0.
Кроме того, величина команды Vu* напряжения фазы U уменьшается сразу же после выполнения изменения к режиму синхронной трехимпульсной ШИМ в момент времени около 0,7 с, это обусловлено командной величиной PMFM напряжения, которая умножается на 1,274 с помощью таблицы 54 регулировки усиления в режиме многоимпульсной ШИМ, а при изменении умножается, как описано выше, на 1,0.
На протяжении времени от начального запуска до момента времени около 1,0 с регулирование максимального вращающего момента осуществляется блоком 10 создания команды тока, и команда id* тока по d-оси и команда iq* тока по q-оси являются постоянными, поскольку команда Т* вращающего момента является постоянной.
В момент времени около 1,0 с, поскольку коэффициент PMF модуляции достигает 1,0, синхронный одноимпульсный режим выбирается в качестве импульсного режима, и скорректированная команда dV тока отрицательно возрастает, так что команда id* тока по d-оси также соответственно отрицательно возрастает. Ток id по d-оси отслеживает команду id* тока по d-оси, отрицательно возрастает. На основании этого установлено, что желательно осуществлять управление с ослаблением поля, а также поддерживать значение коэффициента PMF модуляции бесконечно близким к 1,0, то есть поддерживать напряжение на выводах электродвигателя 6 постоянным.
На основании того, что вращающий момент отслеживает команду Т* вращающего момента, установлено, что скорость вращения электродвигателя 6 устойчиво возрастает, поскольку команда Т* вращающего момента уменьшается обратно пропорционально скорости вращения, чтобы электродвигатель 6 работал с постоянной выходной мощностью.
В момент времени около 1,8 с команда Т* вращающего момента сразу снижается до нуля для остановки инвертора 2 (все отпирающие сигналы U, V, W и X, Y, Z выключаются). Затем инвертор перезапускается в режиме работы под нагрузкой в момент времени около 2,0 с и работает в режиме работы под нагрузкой до момента времени около 2,5 с. Установлено, что в продолжение ряда таких операций вращающий момент Т совпадает с командой Т* вращающего момента при условии, что осуществляется нормальная работа.
Кроме того, поскольку импульсные режимы переключаются в зависимости от коэффициента PMF модуляции, то на основании показателей режима синхронной трехимпульсной ШИМ и показателей режима синхронной одноимпульсной ШИМ установлено, что импульсный режим автоматически изменяется к режиму синхронной трехимпульсной ШИМ, когда коэффициент PMF модуляции становится меньше 1,0 в продолжение процессов снижения команды Т* вращающего момента и перезапуска.
На протяжении времени от около 2,2 с до около 2,3 с команда Т* вращающего момента становится большой по сравнению со скоростью вращения, так что электродвигатель 6 работает в диапазоне, где управление с ослаблением поля теоретически не реализуется. В этом диапазоне, даже если команда id* тока по d-оси корректируется в сторону отрицательного значения с использованием скорректированной команды dV тока, величина командного вектора выходного напряжения для инвертора не может быть снижена до максимального напряжения или меньшего, которое инвертор может выдавать. Однако установлено, что поскольку скорректированная команда dV тока ограничена постоянным значением (-150 А), которое определяется коэффициентом PMF модуляции, установленным значением LIMH верхнего предела отклонения и коэффициентом K усиления, то скорректированная команда dV тока не становится чрезмерно большой.
В момент времени около 2,7 с команде Т* вращающего момента устанавливается отрицательное значение, и инвертор запускается в рекуперативном режиме работы. В момент времени около 3,2 с команда Т* вращающего момента сразу устанавливается равной нулю для остановки инвертора 2 (отпирающие сигналы U, V, W и X, Y, Z выключаются), и затем инвертор перезапускается в момент времени около 3,4 с. Установлено, что в продолжение ряда таких операций вращающий момент Т также совпадает с командой Т* вращающего момента при условии, что осуществляется нормальная работа.
Кроме того, установлено, что поскольку коэффициент PMF модуляции становится меньше 1,0 в течение процессов повышения и снижения команды Т* вращающего момента, то импульсный режим автоматически изменяется к режиму синхронной трехимпульсной ШИМ, и что режим синхронной одноимпульсной ШИМ автоматически выбирается на стадии, когда коэффициент PMF модуляции достигает 1,0.
Несмотря на то что рекуперативная работа непрерывно осуществляется после момента времени около 3,4 с, команда id* тока по d-оси регулируется, чтобы она была отрицательной величиной, путем использования скорректированной команды dV тока, так что управление с ослаблением поля нормально осуществляется до момента времени около 4,2 с.
После момента времени около 4,2 с, поскольку напряжение на выводах электродвигателя 6 уменьшается вследствие снижения его скорости вращения, то коэффициент PMF модуляции становится меньше 1,0, и скорректированная команда dV тока автоматически становится нулевой. В то же самое время импульсный режим изменяется к режиму синхронной трехимпульсной ШИМ. При дальнейшем уменьшении коэффициента PMF модуляции в момент времени около 4,5 с импульсный режим изменяется к режиму многоимпульсной ШИМ и одновременно выбирается первый режим регулирования.
Таким образом, установлено, что устойчивая работа может осуществляться даже в диапазоне работы с ослаблением поля и переходы между диапазоном работы с ослаблением поля и другими диапазонами также стабильно достигаются. Кроме того, установлено, что переходы между режимами регулирования и между импульсными режимами могут стабильно достигаться.
Как описывалось выше, настоящим изобретением может предоставляться векторный регулятор для синхронного электродвигателя с постоянными магнитами, который может осуществлять устойчивые переходы в режиме работы в диапазоне скорости вращения электродвигателя 6 от низкой до высокой с переключением импульсных режимов и режимов регулирования инвертора 2 с более простой конфигурацией, по сравнению с известной, может осуществлять устойчивую работу с ослаблением поля в одноимпульсном режиме, в котором выходное напряжение инвертора 2 может быть максимально увеличено в области высокой скорости вращения.
Импульсные режимы и режимы регулирования могут переключаться не на основании коэффициента модуляции, а на основании команды напряжения, частоты двигателя, частоты инвертора, скорости железнодорожного вагона и т.п.
Конфигурация, описанная в осуществлении, является примером объекта настоящего изобретения и может сочетаться с другой конфигурацией из предшествующего уровня техники. Конфигурация, модифицированная, например, путем отбрасывания части ее, также может находиться в объеме изобретения.
Хотя в описании объект изобретения рассмотрен применительно к регулятору для электрических железнодорожных вагонов, области применения не ограничены ими. Изобретение может быть применено в различных родственных областях, таких как электромобили и подъемные устройства.
Изобретение относится к области электротехники и может быть использовано для векторного управления синхронных электродвигателей с постоянными магнитами. Техническим результатом является упрощение и повышение устойчивости регулирования. Векторный регулятор для синхронного электродвигателя с постоянными магнитами может быть реализован в упрощенной конфигурации для работы с ослаблением поля в одноимпульсном режиме в диапазоне высоких скоростей путем обеспечения компенсатором команды тока коррекции команды тока с помощью скорректированной команды тока, вычисленной на основании коэффициента модуляции. 15 з.п. ф-лы, 11 ил.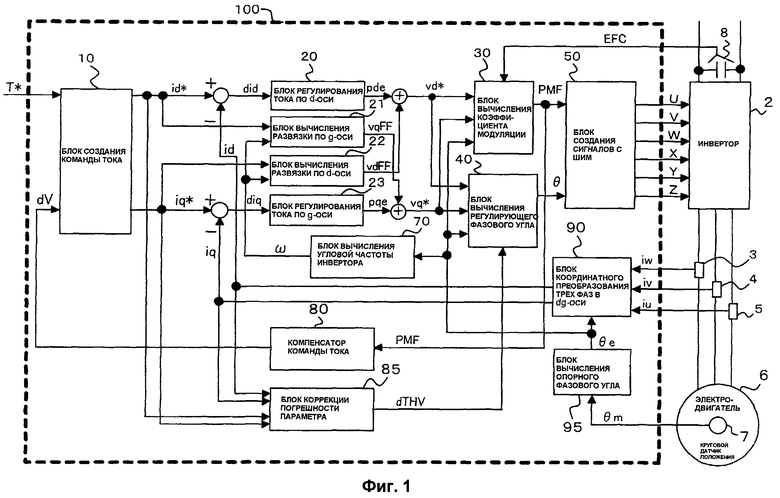
1. Векторный регулятор для синхронного электродвигателя с постоянными магнитами, который регулирует переменный ток от инвертора, который приводит в движение синхронный электродвигатель с постоянными магнитами так, чтобы довести до совпадения с командой тока, содержащий: блок вычисления опорного фазового угла для создания опорного фазового угла синхронного электродвигателя с постоянными магнитами; блок создания команды тока для создания команды тока с использованием заданной команды вращающего момента; блок регулирования тока для производства контрольного вычисления погрешности тока между командой тока и током через синхронный электродвигатель с постоянными магнитами с выводом вычисленной погрешности тока; блок вычисления развязывающего напряжения для вычисления упреждающего напряжения с использованием параметров двигателя синхронного электродвигателя с постоянными магнитами и команды тока; блок вычисления коэффициента модуляции для вывода коэффициента модуляции для инвертора при приеме напряжения постоянного тока на инверторе и команды напряжения, которая является суммой погрешности тока и упреждающего напряжения; блок вычисления регулирующего фазового угла для вывода регулирующего фазового угла для инвертора при приеме команды напряжения и опорного фазового угла; блок создания сигнала с широтно-импульсной модуляцией для создания сигналов с широтно-импульсной модуляцией для инвертора с использованием коэффициента модуляции и регулирующего фазового угла и компенсатор команды тока для коррекции команды тока с использованием скорректированной команды тока, вычисленной на основании коэффициента модуляции; в котором компенсатор команды тока устанавливает скорректированной команде тока значение, полученное путем обработки с помощью элемента временной задержки и путем умножения разности между коэффициентом модуляции и заранее определенным установленным значением коэффициента модуляции на заранее определенную постоянную.
2. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.1, в котором компенсатор команды тока до умножения разности между коэффициентом модуляции и заранее определенным установленным значением коэффициента модуляции на заранее определенную постоянную ограничивает разность диапазоном между установленными значениями верхнего и нижнего пределов отклонения.
3. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.1, в котором коэффициент модуляции определен как имеющий значение единицы, когда инвертор выводит прямоугольные волны, чья основная волновая составляющая линейного напряжения инвертора достигает максимума.
4. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.1, в котором установленное значение коэффициента модуляции устанавливается коэффициентом модуляции, в результате чего инвертор выводит прямоугольные волны, чья основная волновая составляющая линейного напряжения инвертора достигает максимума.
5. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.2, в котором установленное значение верхнего предела отклонения больше нуля и установленное значение нижнего предела отклонения равно нулю или меньше нуля.
6. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.2, в котором установленное значение верхнего предела отклонения устанавливается на основании тока максимального ослабления поля, необходимого для синхронного электродвигателя с постоянными магнитами, для создания командного вращающего момента в диапазоне изменения напряжения постоянного тока на инверторе.
7. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.1, в котором блок создания сигнала с широтно-импульсной модуляцией переключает импульсные режимы инвертора в зависимости от коэффициента модуляции.
8. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.1, в котором блок создания сигнала с широтно-импульсной модуляцией может удерживать сигнал несущей частоты на нуле в зависимости от коэффициента модуляции.
9. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.1, дополнительно содержащий блок коррекции отклонения параметра для вычисления по команде тока и току через синхронный электродвигатель с постоянными магнитами корректирующего значения регулирующего фазового угла, используемого для коррекции регулирующего фазового угла.
10. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.9, в котором корректирующее значение регулирующего фазового угла вычисляется путем расчета векторного управления во вращающейся системе координат, имеющей d-ось и q-ось, ортогональные друг к другу, на основании суммы квадратов составляющих команды тока по d-оси и q-оси и на основании квадратов составляющих тока по d-оси и q-оси через синхронный электродвигатель с постоянными магнитами.
11. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.9, в котором блок коррекции погрешности параметра определяет, производится ли вычисление на основании заранее определенного сигнала.
12. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.11, в котором заранее определенный сигнал представляет собой коэффициент модуляции.
13. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.1, в котором блок регулирования тока определяет, производится ли вычисление на основании заранее определенного сигнала.
14. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.13, в котором заранее определенный сигнал представляет собой коэффициент модуляции.
15. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.10, в котором корректирующее значение регулирующего фазового угла вычисляется при осуществлении пропорционально-интегрального регулирования разности между суммой квадратов составляющих команды тока по d-оси и q-оси и суммой квадратов составляющих тока по d-оси и q-оси через синхронный электродвигатель с постоянными магнитами.
16. Векторный регулятор для синхронного электродвигателя с постоянными магнитами по п.12, в котором блок создания сигнала с широтно-импульсной модуляцией переключает импульсные режимы инвертора в зависимости от коэффициента модуляции и, когда коэффициент модуляции выше, чем коэффициент модуляции, соответствующий нижнему пределу, при котором для инвертора выбирается режим синхронной трехимпульсной широтно-импульсной модуляции, блок регулирования тока не производит вычисление и вместо этого блок коррекции погрешности параметра производит вычисление, и когда коэффициент модуляции ниже, чем коэффициент модуляции, соответствующий нижнему пределу, при котором для инвертора выбирается режим синхронной трехимпульсной широтно-импульсной модуляции, блок регулирования тока производит вычисление, а блок коррекции погрешности параметра не производит вычисление.
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| US 5854547 А, 29.12.1998 | |||
| DE 19636784 А1, 13.03.1997 | |||
| JP 200681287 A, 23.03.2006 | |||
| JP 2003309993 A, 31.10.2003 | |||
| JP 2004064939 A, 26.02.2004. | |||

