Область техники
Изобретение относится к способу определения загрузки насоса бытового прибора, перекачивающего текучую среду и приводящегося от электродвигателя.
Уровень техники
В посудомоечных машинах известным образом применяются насосы для моющего раствора, приводящиеся от электродвигателей с расщепленными полюсами или синхронных двигателей с однофазной обмоткой. Электродвигатели таких насосов представляют собой двигатели с однофазной обмоткой, рассчитанные под дискретную рабочую точку и непосредственно подключенные к сети электропитания. В этом случае получение информации о текущей загрузке таких насосов является дорогостоящей или сложной задачей.
Раскрытие изобретения
Задачей изобретения является разработка способа определения режима / загрузки насоса бытового прибора, приводящегося от электродвигателя (электродвигателя постоянного тока с электронным коммутатором, то есть ЕС-двигателя).
Согласно изобретению задача решается за счет того, что насос приводится от синхронного электродвигателя, причем на основании моментообразующей составляющей тока определяется, по меньшей мере, загрузка (т.е. состояние нагрузки) насоса. В результате насос бытового прибора согласно изобретению приводится от специального электродвигателя, а именно от трехфазного синхронного двигателя с трехфазной обмоткой и возбуждением от постоянных магнитов, причем двигатель насоса имеет предпочтительно векторное управление. При этом синхронный двигатель питается от преобразователя с трехфазной системой напряжений с широтно-импульсной модуляцией, которая позволяет задавать частоту, фазу и амплитуду. Модулятором называется часть программного обеспечения, которая отвечает за генерацию синусоидального напряжения. За ним следует таймер двигателя, являющийся физической частью микроконтроллера для генерации ШИМ-импульсов, а за ним, со стороны выхода, узлы выходного каскада В6. В упомянутой системе векторного управления происходит перемещение пространственного вектора, который вращается вместе с валом ротора. При этом имеет место обратная связь в форме контура регулирования и последовательной трансформации сигнала. Благодаря трансформации по осям d/q в векторном управлении крутящий момент синхронного двигателя регулируется только посредством составляющей тока статора по оси q, а составляющая по оси d в идеальном случае приближается к нулю. Благодаря измерению тока, использованию модели двигателя и целенаправленному регулированию синхронного двигателя с помощью трехфазной системы, которая, как упоминалось выше, позволяет задавать частоту, фазу и амплитуду, образуется замкнутый регулирующий контур. Внутри этой системы составляющая iq тока прямо пропорциональна загрузке насоса. Следовательно, по характеристике составляющей iq тока можно сделать вывод о нагрузке насоса, приводимого от синхронного двигателя.
В частности, загрузка определяется по зависимости составляющей iq тока от времени.
Согласно следующему варианту исполнения изобретения в качестве состояний загрузки определяется нагрузка насоса, холостой ход насоса, блокировка прохождения текучей среды через насос и/или перекачанное количество текучей среды. Если бытовой прибор представляет собой, например, посудомоечную машину, то опорожнение прибора производится при помощи так называемого насоса для моющего раствора. Этот насос полностью выкачивает текучую среду, в частности воду, из бытового прибора. После этого в посудомоечных машинах уровня техники насос продолжал работать на холостом ходу и в этом режиме служил причиной повышения уровня шума и бесполезных электрических потерь. Если в таком насосе происходит закупорка сливного шланга, то насос работает хотя и с пониженной нагрузкой, но безрезультатно. Изобретение позволяет определять холостой ход и закупорку, благодаря чему насос может быть своевременно отключен, а в случае закупорки - аварийно отключен. Кроме того, выгодным образом количество перекачанной текучей среды можно определить по составляющей iq тока. По существу, результатом будет снижение уровня шума, экономия энергии и распознавание неисправностей. Кроме того, можно целенаправленно откачивать определенное количество текучей среды, в частности воды. По существу можно сказать, что согласно изобретению насос вместе со своим приводом работает как датчик, чтобы контролировать упомянутые нежелательные или желательные режимы работы.
Согласно следующему варианту исполнения загрузка насоса определяется на основании последовательных минимума и максимума тока на графике составляющей iq тока. Таким образом, загрузка насоса определяется по такому графику минимумов и максимумов.
Если после определения загрузки заданное значение отрицательного изменения составляющей iq тока оказалось превышено, то это означает холостой ход насоса. При распознавании холостого хода управляющий блок бытового прибора может отключить насос, так как считается, что текучая среда уже откачана полностью.
Можно использовать только разность тока нагрузки и тока холостого хода (составляющей iq тока) для расчета интеграла. Согласно предпочтительному варианту исполнения на основании интеграла по времени составляющей iq тока можно рассчитать перекачанное количество текучей среды. Благодаря этому можно определять количество целенаправленно откачанной текучей среды. В частности, на основании интеграла по времени разности между величиной составляющей iq тока в случае нагрузки и величиной составляющей iq тока в случае холостого хода можно определить перекачанное количество текучей среды.
В частности, выгоден вариант, в котором на основании измерения длительности работы насоса и того факта, что минимальная заданная величина составляющей iq тока в случае нагрузки не достигнута, а состояние холостого хода не распознано, определяется блокировка прохождения текучей среды через насос. В посудомоечной машине или стиральной машине при этом речь может идти, например, о заблокированном / закупоренном сливном шланге.
В особенно предпочтительном варианте в качестве составляющей iq тока используется составляющая iq тока с отфильтрованными нижними частотами, так как благодаря фильтрации нижних частот можно сделать особенно точные выводы о загрузке насоса.
Предпочтительно насос представляет собой насос посудомоечной или стиральной машины. В частности, насос может представлять собой насос для моющего раствора, предпочтительно насос для моющего / стирального раствора посудомоечной / стиральной машины. Текучая среда, перекачиваемая насосом, представляет собой, в частности, жидкую среду, предпочтительно воду или моющий / стиральный раствор.
Кроме того, изобретение относится к устройству для определения загрузки насоса бытового прибора, перекачивающего текучую среду и приводящегося от электродвигателя, в частности, к устройству для осуществления описанного выше способа, с трехфазным синхронным электродвигателем с трехфазной обмоткой и возбуждением от постоянных магнитов, от которого приводится насос, с устройством векторного управления синхронным двигателем и с детекторной схемой, которая на основании моментообразующей составляющей iq тока системы векторного управления определяет, по меньшей мере, загрузку насоса.
Кроме того, изобретение относится к бытовому прибору, в частности к посудомоечной или стиральной машине, которая оснащена устройством указанного типа.
Наконец, изобретение относится к бытовому прибору, в частности к посудомоечной или стиральной машине, которая оснащена устройством и насосом указанного выше типа.
Краткое описание чертежей
Вариант исполнения изобретения показан на фигурах, на которых изображено:
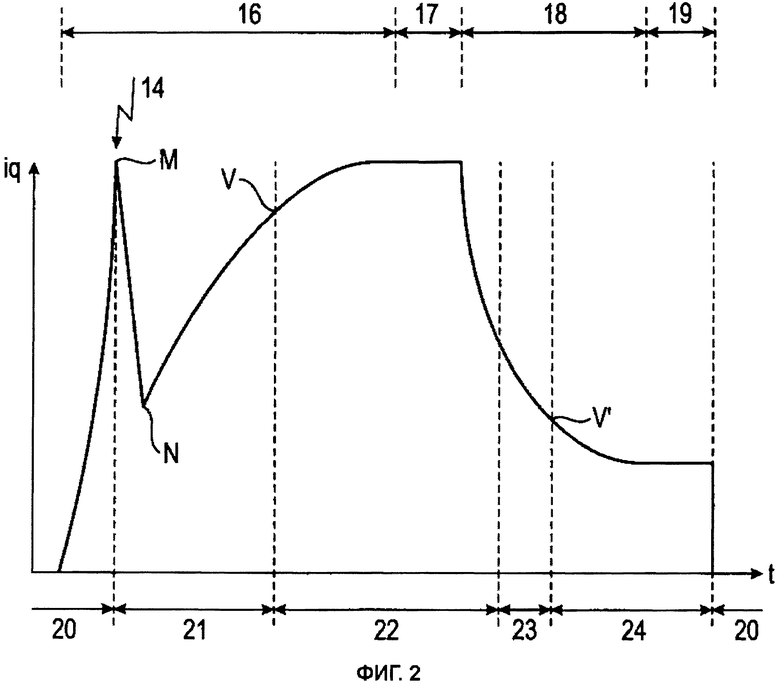
Фигура 1: эквивалентная схема регулятора системы векторного управления для трехфазного синхронного двигателя насоса с возбуждением от постоянных магнитов.
Фигура 2: диаграмма зависимости тока от времени для составляющей iq тока системы векторного управления.
Осуществление изобретения
Изобретение основывается на насосе бытового прибора, в частности посудомоечной машины, который работает предпочтительно в качестве насоса для моющего раствора и отвечает за опорожнение посудомоечной машины, то есть за откачивание используемой текучей среды, в частности жидкости, предпочтительно воды. Этот насос приводится от трехфазного синхронного электродвигателя с трехфазной обмоткой и возбуждением от постоянных магнитов, причем трехфазная обмотка синхронного двигателя в предлагаемом варианте исполнения включена по схеме звезды. Эта звезда содержит центральную точку звезды. Так как суммарный ток точки звезды равен нулю, достаточно замерить электрический ток в двух из трех обмоток. При этом речь идет о двух токах обмотки, ia и ib. С помощью двух токов ia, ib обмотки можно рассчитать всю трехфазную систему. Также следует заметить, что понятие «обмотки» подразумевает обмотки двигателя, если речь идет о физической системе обмоток. Если же речь идет о создании системы напряжений, то, напротив, используется понятие «фазы».
Для управления синхронным двигателем используется система векторного управления. Для этого рассчитывается трехфазная система тока, число n оборотов синхронного двигателя и тем самым насоса и положение ротора синхронного двигателя, в частности угол φ выбега ротора. В частности, в целях упрощения, число n оборотов и угол φ выбега ротора рассчитываются по токам посредством модели двигателя. На этом мы остановимся позже. Следовательно, дальше речь пойдет об измерении двух из трех токов ia, ib обмотки в описанной системе на входе регулирующего контура и о расчете на основании этих токов трехфазной системы токов, числа n оборотов и угла φ выбега ротора с помощью модели двигателя, отображающей синхронный двигатель.
На фиг.1 представлена эквивалентная схема регулирующего контура системы векторного управления. В трехфазной системе токов, содержащей смещенные на 120° токи, измеряются два тока ia, ib обмотки. С помощью трансформации 1 Парка два реальных, смещенных на 120° тока ia, ib обмотки преобразуются в сложную, прямоугольную, ориентированную на статор систему координат, то есть теперь имеет место двухфазная 90°-система, которая содержит составляющие iα и iβ тока. Две этих составляющих iα и iβ тока при помощи трансформации 2 Кларка поворачиваются на угол φ выбега ротора в систему координат ротора. В результате получаем повернутые составляющие id и iq тока, причем id соответствует току возбуждения, a iq - току синхронного двигателя, образующему крутящий момент. Во включенных далее регулирующих ПИ-каскадах 3 и 4 эти составляющие id и iq тока доводятся до различных заданных значений id soil и iq soil. Затем происходит обратная трансформация 5, которая, помимо составляющих uα и uβ, напряжения для модели 6 двигателя, определяет значения амплитуды для модулятора 7. Под модулятором 7 понимается элемент, который способен создать трехфазную систему напряжений с широтно-импульсной модуляцией, в которой можно регулировать частоту, фазу и амплитуду. Для получения амплитуд составляющих uα и uβ напряжения на входе модулятора 7 предусмотрен генератор 8 абсолютных величин. Уже упоминавшийся роторный угол φ (угол выбега ротора) не измеряется непосредственно на синхронном электродвигателе, а рассчитывается с помощью модели 6 двигателя на основании составляющих iα и iβ тока и составляющих uα и uβ напряжения. Модель 6 двигателя имитирует синхронный электродвигатель. На основании временного дифференцирования роторного угла рассчитывается число n оборотов. Это обозначено как 9. Зная дискретную длительность шага модуляции, по числу n оборотов можно рассчитать текущий угол для модулятора 7. Так как в момент пуска синхронного электродвигателя информация о токе и числе оборотов отсутствует, синхронный электродвигатель запускается в управляемом режиме. Для этого предусмотрена ступенчатая модель 10, которая после задания начальной крутизны выдает текущее целевое число оборотов и текущий угол. Заданные значения обеих составляющих id и iq тока являются фиксированными. На фигуре 1 показаны три переключателя 11, 12 и 13, каждый из которых занимает на фигуре то положение, которое необходимо для запуска синхронного электродвигателя. Когда синхронный двигатель запущен, они переключаются. При пуске модулятор 7 проходит таблицу синусов для генерации образца выходного напряжения с дискретой углового перемещения ступенчатой модели 10 и амплитудой, взятой из регулирующих контуров тока для заданных пусковых значений. По достижении установленного числа n оборотов, при котором могут быть гарантированно измерены токи ia, ib обмотки и может быть гарантированно рассчитана модель 6 двигателя, производится переключение из управляемого режима в регулируемый режим, то есть переключатели 11-13 перекидываются, и возникает точка 14 синхронизации (см. фиг.2). Затем регулятор 15 числа оборотов, выполненный в виде ПИ-регулятора, после задания имеющегося отклонения числа оборотов рассчитывает заданное значение iq soil для моментообразующей составляющей iq тока. Возбуждающая составляющая id тока сводится к нулю.
В отношении измерения токов iα и iβ обмотки следует заметить, что они измеряются при помощи двух шунтирующих сопротивлений в основаниях полумостовых схем фаз U и V синхронного двигателя. В частности, в модуляторе 7 предусмотрена мостовая схема В6. Падение напряжения на упомянутых шунтирующих сопротивлениях прямо пропорционально токам в соответствующих обмотках U и V двигателя. Падение напряжения на обоих шунтирующих сопротивлениях доводится до измерительного диапазона микроконтроллера (от 0 до 5 В) с помощью двух быстрых усилителей. Усилители идентичны друг другу, а их размеры выбраны таким образом, чтобы можно было без задержки измерять ток с шагом широтно-импульсной модуляции. Поскольку на обоих основаниях нужно измерять положительный и отрицательный ток равной амплитуды, каждый из усилителей обладает напряжением смещения, которое приходится на середину возможного диапазона модуляции. Соответствующее напряжение смещения постоянно измеряется при остановке двигателя и проверяется на достоверность. Для минимизации влияния помех в напряжениях смещения фильтруются нижние частоты. В случае недостоверности напряжения смещения программное обеспечение преобразователя переходит в состояние ошибки, в котором управление насосом невозможно.
Сканирование токов ia и ib обмотки управляется прерываниями и выполняется с частотой широтно-импульсной модуляции широтно-импульсного модулятора преобразователя. Момент сканирования приходится на середину настройки трех низкоуровневых мощных полупроводников преобразователя. К этому моменту трехфазная обмотка синхронного двигателя замыкается накоротко через мощные полупроводники и может быть измерен ток свободного хода в обмотке двигателя. Так как запуск сканирования приходится в точности на середину импульса, влияние помех, обусловленных синхронизирующими фронтами широтно-импульсной модуляции, сводится к минимуму. Во время одного цикла широтно-импульсной модуляции всегда сканируется только один ток. Оба тока измеряются со смещением по времени на период цикла широтно-импульсной модуляции перед расчетом модели двигателя. При этом предполагается, что ток в фазах синхронного двигателя не меняется во время цикла широтно-импульсной модуляции. Частота широтно-импульсной модуляции выбирается таким образом, чтобы выполнялось это условие. Определение токов происходит с шагом аналого-цифрового преобразователя, равным 10 бит. С таким шагом отображается значение двойной амплитуды фазных токов.
Модуляция выходных напряжений преобразователя реализована в соответствии с таблицей поиска (LUT). Текущий угол выходного напряжения сохраняется в фазовом аккумуляторе (16 бит) и циклично корректируется регулирующим алгоритмом каждые 600 мкс. В промежутках между коррекциями угол модуляции имеет постоянную угловую скорость. Таблица поиска LUT имеет шаг 16 бит и заложена в память контроллера с 256 опорными точками. Обновление значений широтно-импульсной модуляции происходит в каждом втором цикле широтно-импульсной модуляции. Значения выходного напряжения корректируются с помощью напряжения промежуточного контура преобразователя при каждой коррекции значения модуляции. Это позволяет в максимально возможной степени компенсировать воздействие пульсации напряжения в промежуточном контуре преобразователя.
Концепция регулирования согласно изобретению, а именно векторное управление, позволяет получить моментообразующую составляющую iq тока и возбуждающую составляющую id тока непосредственно во время работы двигателя. Таким образом, загрузка модулятора 7 (преобразователя) непосредственно отражается составляющей iq тока. Составляющая iq тока подвергается фильтрации нижних частот (SW), после чего согласно изобретению используется как мера загрузки насоса, то есть используется для распознавания загрузки насоса.
На фиг.2 представлен характеристический график составляющей iq тока относительно процесса откачивания моющего раствора / воды из бытового прибора, в частности из посудомоечной машины.
На фиг.2 показана зависимость составляющей iq тока от времени t для процесса откачивания насоса, работающего согласно изобретению. Обозначены различные периоды. При этом речь идет о времени 16 запуска насоса, следующем за ним периоде 17 полного объемного расхода и следующем за ним периоде 18 снижающегося объемного расхода. Далее наступает период 19, в котором объемный расход отсутствует. В периоде 20 насос не активен с точки зрения перекачивания текучей среды. Период 21 обозначает распознавание загрузки, период 22 - работу под нагрузкой, период 23 - работу с пониженной нагрузкой, период 24 - холостой ход.
Описанные ниже действия автоматически выполняются при каждом запуске насоса, в частности насоса для моющего раствора, причем заново выполняется распознавание холостого хода и распознавание объема. При этом способ согласно изобретению ориентируется на график составляющей iq тока согласно фигуре 2. Во время управляемого запуска в период 20 (на фиг.2 слева) составляющая iq тока достигает максимума М. После управляемого запуска в момент 14 синхронизации, обозначенный на фиг.2 молнией, начинается распознавание загрузки и холостого хода насоса. После максимума М тока составляющая iq тока падает до минимума N тока, который распознается. В результате получается положительное изменение тока определенной высоты, то есть положительное значение diq. Если это значение превышает заданное значение V, имеет место расчетный случай загрузки, то есть конструкция находится в состоянии распознавания загрузки. После этого происходит определение объема, то есть определение объема текучей среды, перекачиваемой насосом. Для этого берется интеграл разности (iqLast-iqLeer), который пропорционален объему откачанной текучей среды. Ток холостого хода известен из предыдущего процесса откачивания. Если интеграл достигает заданного значения объема, которое может быть задано для соответствующего процесса откачивания, то откачивание объема подтверждается, то есть откачан заданный объем воды. Одновременно определяется и постоянно обновляется максимум тока в режиме загрузки. Отклонение от этого максимума тока, то есть отрицательное значение diq, используется для последующего распознавания холостого хода. Если значение не достигает заданного значения V', насос начинает работать в холостом режиме и запускается таймер выбега (безопасного периода холостого хода), по истечении которого происходит распознавание холостого хода. После этого дополнительно может быть выполнено калибровочное измерение. Для этого запускается еще один таймер, который позволяет переждать время установления холостого хода насоса и после этого замерить ток холостого хода. Измеренное значение сохраняется и служит базовым значением тока холостого хода для последующих процессов откачивания.
При распознавании блокировки прохождения текучей среды через насос изобретение исходит из того, что длительность откачивания максимального объема текучей среды из бытового прибора даже в самом худшем случае не превышает известного заданного времени. Такой самый худший случай определяется высотой сливного шланга, максимально допустимым сечением загрязненного, частично закупоренного или слегка пережатого сливного шланга, а также консистенцией откачиваемой жидкой среды, например грязной воды. Составляющая iq тока при сниженном потоке через насос будет соответственно ниже составляющей iq тока в нормальном режиме работы. Если составляющая iq тока по истечении максимального заданного времени все еще ниже определенного минимального тока загрузки, а холостой ход не был распознан, делается вывод о блокировке сливного шланга или подобной неисправности. Отсчет этого максимального заданного времени начинается с запуском таймера в точке 14 синхронизации. Если по истечении заданного времени по таймеру не был распознан холостой ход, а определяемое значение составляющей iq тока меньше определенного заданного значения, то распознается блокировка сливного шланга или блокировка прохождения текучей среды. Предварительное распознавание загрузки не требуется, то есть распознавание производится независимо от распознавания загрузки.
Изобретение относится к способу определения загрузки насоса бытового прибора, перекачивающего текучую среду и приводимого электродвигателем. Согласно изобретению насос приводится синхронным электродвигателем с возбуждением от постоянных магнитов, причем на основании моментообразующей составляющей iq тока определяется, по меньшей мере, загрузка насоса. Технический результат - возможность определения загрузки насоса на основании моментообразующей составляющей тока. 4 н. и 11 з.п. ф-лы, 2 ил.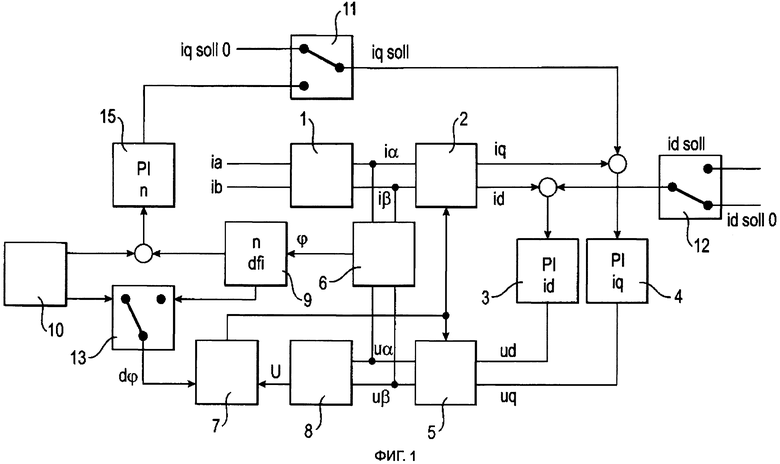
1. Способ определения загрузки насоса бытового прибора, перекачивающего текучую среду и приводимого от электродвигателя, отличающийся тем, что насос приводится от имеющего векторное управление трехфазного синхронного электродвигателя с трехфазной обмоткой и возбуждением от постоянных магнитов, причем посредством векторного управления на основании двух (ia, ib) из трех токов обмоток определяют моментообразующую составляющую (iq) тока, на основании которой определяют, по меньшей мере, одно состояние загрузки насоса.
2. Способ по п.1, отличающийся тем, что загрузку определяют по графику составляющей iq тока.
3. Способ по п.1, отличающийся тем, что в качестве состояний загрузки определяют нагрузку насоса, холостой ход насоса, блокировку прохождения текучей среды через насос и/или перекачанное количество текучей среды.
4. Способ по п.1, отличающийся тем, что загрузку насоса определяют на основании последовательных минимума и максимума тока на графике составляющей iq тока.
5. Способ по п.1, отличающийся тем, что холостой ход насоса определяют на основании превышения заданного значения V′ отрицательного изменения составляющей iq тока, произошедшего после нагрузки.
6. Способ по п.1, отличающийся тем, что перекачанное количество текучей среды определяют на основании интеграла по времени составляющей iq тока.
7. Способ по п.1, отличающийся тем, что перекачанное количество текучей среды определяют на основании интеграла по времени разности между величиной составляющей iq тока в случае нагрузки и величиной составляющей iq тока в случае холостого хода.
8. Способ по п.1, отличающийся тем, что на основании измерения длительности работы насоса и того факта, что минимальная заданная величина составляющей iq тока в случае нагрузки не достигнута, а состояние холостого хода не распознано, определяют блокировку прохождения текучей среды через насос.
9. Способ по одному из пп.1-8, отличающийся тем, что в качестве составляющей iq тока используют составляющую iq тока с отфильтрованными нижними частотами.
10. Способ по одному из пп.1-8, отличающийся тем, что насос представляет собой насос посудомоечной или стиральной машины.
11. Способ по одному из пп.1-8, отличающийся тем, что насос представляет собой насос для моющего раствора, в частности насос для моющего / стирального раствора посудомоечной / стиральной машины.
12. Способ по одному из пп.1-8, отличающийся тем, что текучая среда, перекачиваемая насосом, представляет собой жидкую среду, в частности воду или моющий / стиральный раствор.
13. Устройство для определения загрузки насоса бытового прибора, перекачивающего текучую среду и приводимого от электродвигателя, в частности устройство для осуществления способа, заявленного в одном или нескольких предыдущих пунктах, отличающееся тем, что насос приводится от имеющего векторное управление трехфазного синхронного электродвигателя с трехфазной обмоткой и возбуждением от постоянных магнитов, а устройство содержит детекторную схему, выполненную с возможностью определения посредством векторного управления на основании двух (ia, ib) из трех токов обмоток моментообразующей составляющей (iq) тока системы векторного управления и определения на ее основании, по меньшей мере, одного состояния загрузки насоса.
14. Бытовой прибор, в частности посудомоечная или стиральная машина, который оснащен устройством, заявленным в п.13.
15. Бытовой прибор, в частности посудомоечная или стиральная машина, который оснащен устройством и насосом, заявленными в одном или нескольких предыдущих пунктах.
| DE102004060206B3,14.06.2006 | |||
| СПОСОБ ЭЛЕКТРОПИТАНИЯ В ПУСКОВОМ И УСТАНОВИВШЕМСЯ РЕЖИМАХ СИНХРОННОГО ДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ, В ЧАСТНОСТИ, ПРЕДНАЗНАЧЕННОГО ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ГИДРАВЛИЧЕСКОГО НАСОСА | 1999 |
|
RU2222862C2 |
| Устройство для управления солевыми насосами | 1977 |
|
SU682672A1 |

