Уровень техники
В системах управления полетом современных летательных аппаратах механические действия над командными рычагами (ручкой управления, рычагом ножного управления и т.д.) и/или информация от автопилота преобразуются в аналоговые сигналы, передаваемые на силовые приводы, перемещающие рулевые поверхности, обеспечивая вращение управляемого самолета вокруг трех его осей.
В настоящее время силовые приводы, наиболее широко использующиеся в авиации, представляют собой гидравлические сервоприводы «С/П». Гидравлический сервопривод представляет собой силовой привод, соединенный трубопроводами с гидравлической системой летательного аппарата. Он содержит сервоклапан, управляющий гидравлическим давлением, создаваемым гидравлическими насосами летательного аппарата, для перемещения штока силового привода, который соединен с рулевой поверхностью, например элероном, рулем высоты, рулем направления или аэродинамическим тормозом.
Гидравлическая система самолета может содержать несколько гидравлических контуров, содержащих резервуары, насосы, фильтры, коллекторы высокого давления и низкого давления и т.д., снабжающие множество гидравлических силовых приводов, которые управляются аналоговыми электрическими сигналами.
Гидравлический контур может снабжаться гидравлической жидкостью или с помощью гидромеханического насоса «НПД» (насос с приводом от двигателя), непосредственно соединенного с редуктором привода агрегатов (редуктором) и имеющегося на каждом двигателе, или с помощью насоса «НПЭ» (насос с приводом от электродвигателя).
На самолетах последнего поколения устанавливаются электрогидравлические силовые приводы «ЭРСП» (электрогидравлический резервный силовой привод) и «ЭСП» (электрогидростатический силовой привод).
Силовой привод ЭРСП представляет собой гибридный силовой привод, использующий электрическую и гидравлическую энергии. Это гидравлический сервопривод, к которому добавлен автономный электрический насос, позволяющий подавать гидравлическое давление к силовому приводу в случае выхода из строя главного гидравлического контура. Он присоединен как к гидравлической системе, так и к электрической системе самолета. Главный источник питания снабжен гидравлической системой. В случае дефекта гидравлической системы автономный электрический насос переключается с помощью электрических сигналов на питание и управление силовым приводом.
Электрогидростатический силовой привод ЭСП соединен с электрической сетью самолета и не соединен с гидравлической системой. Он автономно создает собственное гидравлическое давление с помощью резервуара и автономного электрогидравлического насоса, который вырабатывает гидравлическую энергию, необходимую для перемещения управляющего штока.
Структура системы управления полетом современного самолета содержит несколько гидравлических контуров.
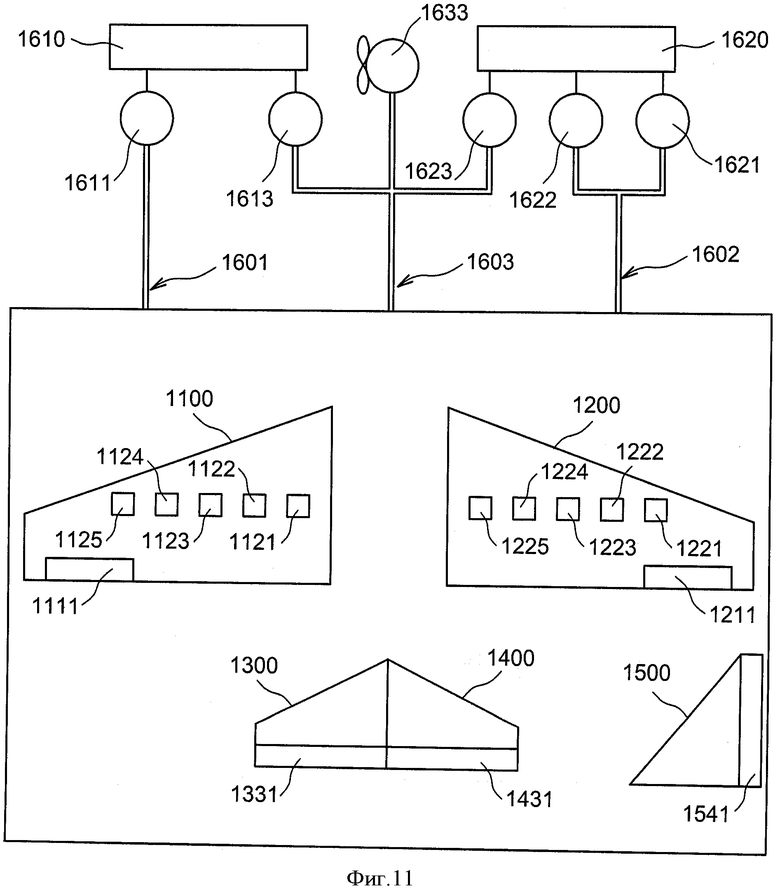
На фиг.11 представлена структура, называемая 3Н, используемая в самолете типа А320 и содержащая три гидравлических контура 1601, 1602, 1603, снабжаемые двумя независимыми двигателями 1610, 1620 самолета. Каждый контур содержит резервуар с гидравлической жидкостью, один или несколько насосов и гидравлические трубопроводы, соединенные с конкретными силовыми приводами (не показано). В каждом их двух контуров 1602 и 1601 давление нагнетается насосом НПД, а в третьем контуре 1603 давление нагнетается насосом НПЭ.
В частности, от первого двигателя 1610 мощность отбирается первым гидромеханическим насосом НПД 1611, который создает давление жидкости в первом контуре 1601.
Таким же образом от второго двигателя 1620 мощность отбирается вторым гидромеханическим насосом 1621, который создает давление жидкости во втором контуре 1602. Второй контур 1602 также может снабжаться гидравлической жидкостью с помощью электромеханического насоса НПЭ 1622, который обеспечивает альтернативно со вторым гидромеханическим насосом НПД 1621, когда двигатель остановлен, создание давления жидкости во втором контуре 1602, например, для открывания грузовой двери.
Кроме того, мощность отбирается от первого двигателя 1610 и/или второго двигателя 1620 электрическим генератором, который подает питание через электрическую шину на электромеханический насос НПЭ 1613 или 1623, который обеспечивает создание давления жидкости в третьем контуре 1603. Третий контур также может снабжаться гидравлической жидкостью с помощью турбины резервного энергоснабжения с приводом от набегающего потока РТ 1633.
На этой фигуре также показаны крылья 1100, 1200 и хвостовое оперение, содержащее горизонтальную плоскость 1300, 1400 и вертикальную плоскость 1500.
Система основного управления полетом самолета состоит из двух элеронов 1111, 1211 и десяти аэродинамических тормозов 1121-1225 на крыльях, двух рулей высоты (или органов управления высотой) 1331, 1431 в горизонтальной плоскости и руля направления 1541 в вертикальной плоскости (или киля).
Рулевые поверхности управляются с помощью гидравлических силовых приводов (не показаны), соединенных с различными гидравлическими контурами 1601, 1602 и 1603. В частности, каждый из элеронов 1111, 1211 и рулей высоты 1331, 1431 управляется двумя гидравлическими силовыми приводами. Руль направления 1541 управляется тремя гидравлическими силовыми приводами. Каждый из десяти аэродинамических тормозов 1121-1225 управляется одним гидравлическим силовым приводом.
Другая структура (не показана) относится к самолету типа A380, который содержит четыре двигателя, по одному насосу НПД на двигатель и два гидравлических контура, т.е. два насоса НПД на контур, к которым добавлено 2 насоса НПЭ на контур. Источники питания для силовых приводов составляют две электрических цепи. Эта структура носит наименование 2Н2Е.
Самолет большого размера требует большего количества рулевых поверхностей. Так, самолет A3 80 содержит шесть элеронов, шестнадцать аэродинамических тормозов, четыре руля высоты и два руля направления.
Эти типы летательных аппаратов используют гидравлические силовые приводы типа С/П, ЭСП или ЭРСП. Все эти гидравлические силовые приводы содержат гидроцилиндр и могут легко перемещать самые малые и самые большие рулевые поверхности летательного аппарата. Принцип их действия, основанный на скольжении гладкого поршня в камере, делает эти приводы, по существу, невосприимчивыми к заклиниванию, т.е. вероятность их заклинивания намного ниже 10-9 на час полета, т.е. крайне маловероятна с точки зрения безопасности полетов. Это очень важно, поскольку заклинивание определенных поверхностей при их выпуске рассматривается с точки зрения безопасности полетов как катастрофическое событие, т.е. вероятность такого события должна быть ниже 10-9 на час полета, что всегда обеспечивается при использовании гидравлических силовых приводов.
Однако гидравлические агрегаты (насосы, резервуары, коллекторы, всасывающие патрубки, соединители и т.д.) оказывают существенное влияние на общую массу летательного аппарата.
Кроме того, монтаж гидравлических трубопроводов на летательном аппарате является затруднительным и дорогостоящим делом из-за необходимости точного выравнивания соединений, необходимости соблюдения правил размещения относительно других систем (защита) и выполнения проверочных испытаний на герметичность.
Кроме того, техническое обслуживание гидравлической системы, когда необходимо открывать гидравлический контур, требует продолжительных операций, следовательно, требует вывода летательного аппарата из эксплуатации на длительное время и является дорогостоящим из-за необходимости изоляции открытого контура, защиты других систем от любого контакта с жидкостью, повторной герметизации и продувки после вмешательства и выполнения испытаний на герметичность.
В настоящее время существуют не содержащие никаких гидравлических агрегатов электромеханические силовые приводы ЭСП, которые требуют только источника электроэнергии для подачи питания. Силовой привод ЭСП может быть приводом линейного типа, содержащим, в частности, шариковый или роликовый ходовые винты, или может быть приводом вращательного типа, содержащим редукторы и подшипники.
Несмотря на это, силовой привод ЭСП может заклиниваться с вероятностью более 10-9 на час полета, и поэтому в настоящее время силовые приводы ЭСП установлены только на некоторых аэродинамических тормозах летательных аппаратов определенного типа, оборудованных большим количеством аэродинамических тормозов. Например, на самолете Боинг 787 силовые приводы ЭСП установлены на крыльях только двух из семи пар аэродинамических тормозов.
Задача настоящего изобретения состоит в создании надежной, прочной и простой системы управления полетом, позволяющей устранить вышеуказанные недостатки и не нуждающейся, в частности, ни в сложном монтаже, ни в длительных ограничивающих и дорогостоящих операциях технического обслуживания.
Раскрытие изобретения
Поставленная задача решена в системе управления полетом самолета, содержащей рулевые поверхности и связанные с ними силовые приводы для управления в полете функциями крена, рыскания, тангажа и аэродинамического торможения самолета; причем все силовые приводы, связанные с рулевыми поверхностями, управляющими по меньшей мере одной из указанных функций, представляют собой электромеханические силовые приводы, а часть указанных рулевых поверхностей, связанных с электромеханическими силовыми приводами, представляет собой разделенные рулевые поверхности, каждая из которых состоит из по меньшей мере двух независимых поверхностей.
Указанная часть разделенных рулевых поверхностей может содержать разделенные рули высоты, и/или разделенные рули направления, и/или разделенные элероны. Каждый разделенный руль высоты может состоять из двух независимых поверхностей руля высоты. Каждый разделенный руль направления может состоять из двух независимых поверхностей руля направления. Каждый разделенный элерон может состоять из двух независимых поверхностей элерона.
Как вариант каждый из разделенных рулей высоты, и/или рулей направления, и/или элеронов может состоять из трех независимых поверхностей.
Преимущественно каждая из независимых поверхностей разделенной рулевой поверхности управляется по меньшей мере одним электромеханическим силовым приводом.
В частности, каждая из независимых поверхностей разделенной рулевой поверхности может управляться по меньшей мере двумя электромеханическими силовыми приводами, содержащими по меньшей мере два электромеханических силовых привода, функционирующих одновременно.
Согласно частному варианту осуществления изобретения каждая из независимых поверхностей по меньшей мере одной группы разделенных рулевых поверхностей управляется одним электромеханическим силовым приводом, и по меньшей мере одна независимая поверхность принадлежит вышеуказанной группе разделенных рулевых поверхностей, содержащих средства балансировки.
Каждая рулевая поверхность, принадлежащая рулевой поверхности аэродинамического тормоза, управляющая функцией аэродинамического торможения самолета, может управляться одним электромеханическим силовым приводом.
Преимущественно указанный электромеханический силовой привод сконфигурирован по необратимой схеме передачи движения, причем необратимость этого электромеханического силового привода обеспечивается устройством преобразования вращательного движения в поступательное.
Согласно одному из вариантов осуществления изобретения каждая рулевая поверхность, принадлежащая рулевым поверхностям аэродинамических тормозов, управляющим функцией аэродинамического торможения летательного аппарата, может управляться по меньшей мере двумя электромеханическими силовыми приводами.
Преимущественно все электромеханические силовые приводы, связанные с рулевыми поверхностями, управляющими по меньшей мере двумя из указанных летных функций, являются идентичными.
Изобретение также относится к летательному аппарату, оборудованному системой управления его полетом согласно любой из вышеуказанных характеристик.
Краткое описание чертежей
На фиг.1 показана часть системы основного управления самолетом согласно изобретению;
на фиг.2А-3D показаны разделенные рулевые поверхности согласно изобретению;
на фиг.4А-4D показаны различные варианты распределения силовых приводов ЭСП и их мощности согласно изобретению;
на фиг.5А-8В показаны различные варианты разделения и распределения силовых приводов ЭСП согласно изобретению;
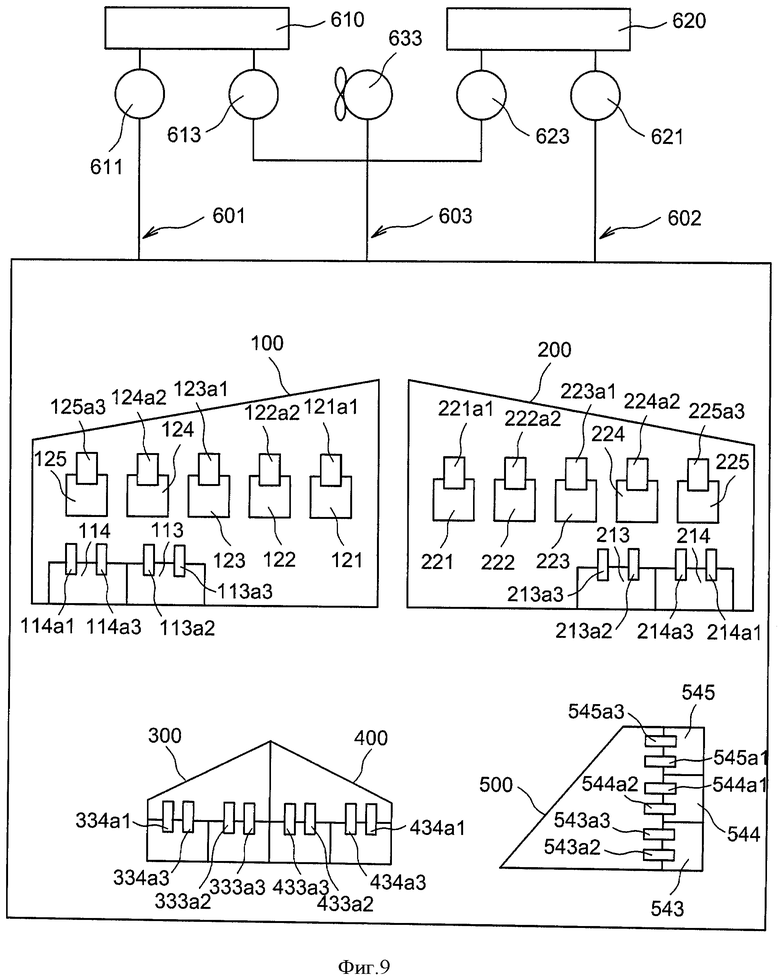
на фиг.9 показан вариант выполнения структуры управления полетом согласно изобретению в типовом самолете средней дальности;
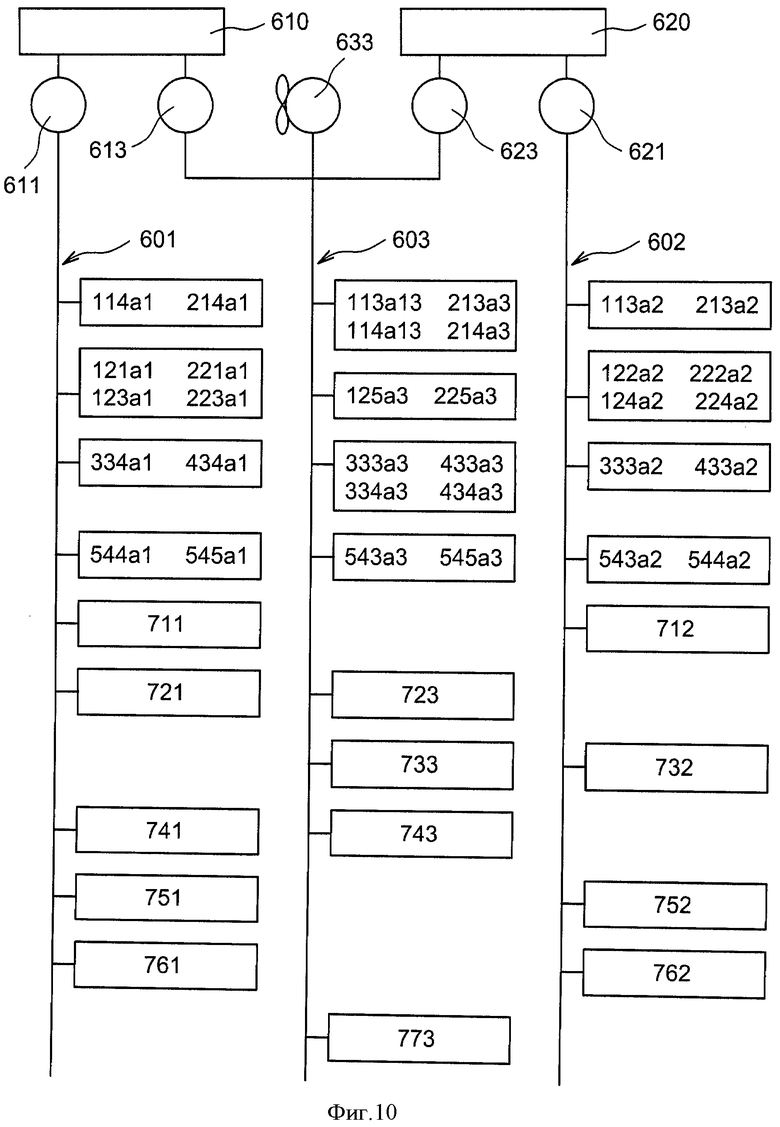
на фиг.10 показано распределение силовых приводов по электрическим контурам в структуре, показанной на фиг.9;
на фиг.11 показана известная структура системы основного управления полетом.
Осуществление изобретения
Основная идея изобретения состоит во все большем использовании ЭСП (электромеханических силовых приводов) в системе основного управления самолетом благодаря совместному действию силовых приводов, сгруппированных в определенных взаимосвязанных зонах самолета, и при необходимости благодаря специальной конфигурации поверхностей системы управления полетом.
Система основного управления самолетом содержит рулевые поверхности и связанные с ними силовые приводы для управления летными функциями крена, рыскания, тангажа и аэродинамического торможения.
Согласно изобретению все силовые приводы, связанные с рулевыми поверхностями, управляющими по меньшей мере одной летной функцией из перечисленных выше, являются электромеханическими силовыми приводами ЭСП.
Электромеханические силовые приводы позволяют получить более электрифицированный самолет за счет удаления по меньшей мере одной части гидравлического средства, относящегося к силовым приводам, связанным с рассматриваемой функцией. Следует отметить, что каждая летная функция обеспечивается соответствующей зоной самолета, что дает возможность удалить по меньшей мере одну часть гидравлической разводки в этой зоне, уменьшая в то же время размеры части, генерирующей гидравлическую энергию. Это дает возможность уменьшить вес самолета, облегчить техническое обслуживание и снизить расходы. Если требуется, это дает возможность получить отдельный образец электромеханических силовых приводов для по меньшей мере одной летной функции. Кроме того, электромеханические силовые приводы более надежны, чем электрогидростатические (ЭСП) и электрогидравлические резервные (ЭРСП), поскольку они содержат меньше механических частей и не содержат никаких гидравлических частей.
Следует отметить, что электромеханические силовые приводы также могут обеспечивать любую возможную комбинация двух, трех или четырех летных функций.
На фиг.1 показана часть системы основного управления полетом, относящаяся, в частности, к летным функциям крена и аэродинамического торможения согласно первому варианту осуществления изобретения.
На этой фигуре показаны левая и правая консоли 100 и 200 крыла. Левая консоль 100 крыла содержит левый элерон 111 и пять левых аэродинамических тормозов 121-125, а правая консоль 200 крыла содержит правый элерон 211 и пять правых аэродинамических тормозов 221-225. Каждый из элеронов 111, 211 и/или аэродинамических тормозов 121-125, 221-225 управляется по меньшей мере одним электромеханическим силовым приводом 111a1, 111а2, 211a1, 211а2 и 121а-225а.
Следует отметить, что вероятность заклинивания силового привода ЭСП составляет порядка 10-7 или даже 10-8 на час полета и соответственно вероятность одновременного заклинивания двух независимых силовых приводов (т.е. на двух независимых рулевых поверхностях) намного ниже 10-9 на час полета, т.е. крайне мала.
Кроме того, последствия заклинивания элерона остаются приемлемыми для безопасности летательного аппарата, поскольку заклинивание элерона может быть компенсировано за счет одновременного поддержания необходимого рабочего диапазона по оси крена другим элероном, все еще пригодным для использования, и при необходимости аэродинамическими тормозами.
Кроме того, последствия заклинивания аэродинамического тормоза остаются незначительными и могут быть легко компенсированы другими аэродинамическими тормозами, все еще пригодными для использования.
Таким образом, пример, соответствующий фиг.1, показывает, что функция аэродинамического торможения и/или летная функция крена могут обеспечиваться силовыми приводами ЭСП, позволяя удалить гидравлическую часть в центрах и/или на концах консолей 100 и 200 крыла. Преимущественно в случае когда обе функции обеспечиваются силовыми приводами ЭСП, имеется возможность удалить всю гидравлическую часть с крыльев летательного аппарата.
Поскольку потребность в электрических компонентах для летательных аппаратов постоянно увеличивается, бортовые электрические генераторы становятся все более многочисленными и мощными. Кроме того, внедрение различных электрических генераторов дает возможность рассматривать электричество как надежный источник энергии. И, наконец, ограничения, накладываемые гидравлическими системами (вес, сложности при техническом обслуживании, связанные с наличием жидкой среды и т.д.), делают необходимым замену гидравлических систем на электрические.
Таким образом, весьма, выгодно использовать силовые приводы ЭСП вместо гидравлических силовых приводов. Однако силовые приводы ЭСП намного более восприимчивы к заклиниванию, чем аналогичные гидравлические средства.
Для решения проблемы заклинивания силовых приводов ЭСП в настоящем изобретении предложено разделить по меньшей мере одну часть рулевых поверхностей системы основного управления самолетом. В частности, согласно изобретению по меньшей мере одна часть рулевых поверхностей, связанных с электромеханическими силовыми приводами, представляет собой разделенные рулевые поверхности, при этом каждая из разделенных рулевых поверхностей состоит из по меньшей мере двух механически независимых быстродействующих поверхностей.
Разделение рулевых поверхностей в случае заклинивания силового привода дает возможность иметь достаточно функциональные быстродействующие поверхности, чтобы противодействовать напряжениям, создаваемым поверхностью заклинивания, а также продолжить управление летательным аппаратом. Кроме того, при уменьшении размеров каждой независимой поверхности заклинивание одной из них создает меньшие потери аэродинамического лобового сопротивления, чем заклинивание цельной рулевой поверхности. Кроме того, разделение рулевых поверхностей на независимые поверхности дает возможность уменьшить мощность силовых приводов, следовательно, позволяет использовать силовые приводы небольшого размера, которые можно очень легко встраивать в хвостовое оперение и несущую поверхность самолета или летательного аппарата.
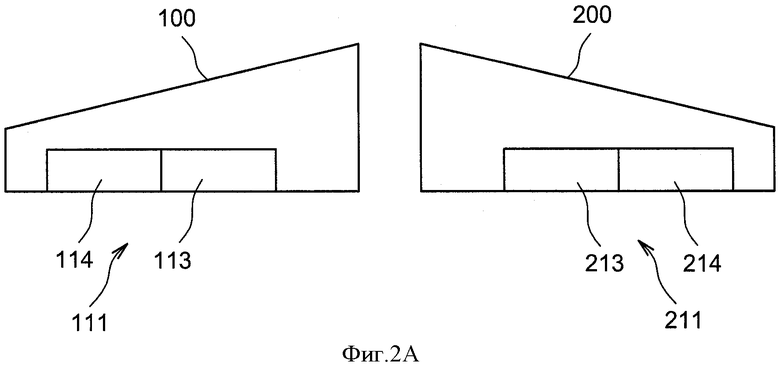
Примеры, изображенные на фиг.2А-3D, показывают, что часть разделенных рулевых поверхностей может содержать разделенные элероны, и/или разделенные рули высоты, и/или разделенные рули направления.
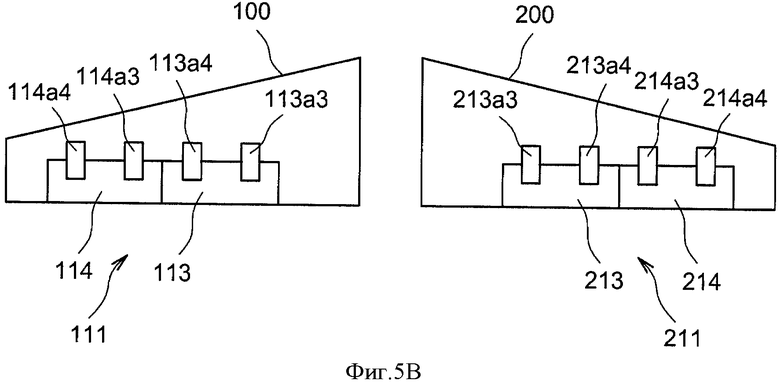
Как показано на фиг.2, каждый элерон может быть разделен на две независимые поверхности. В частности, на этой фигуре показано, что левый элерон 111 состоит из двух независимых поверхностей 113 и 114, а правый элерон 211 - из двух независимых поверхностей 213 и 214.
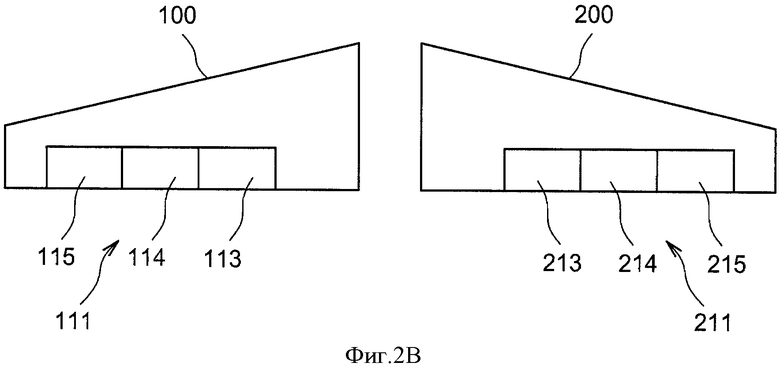
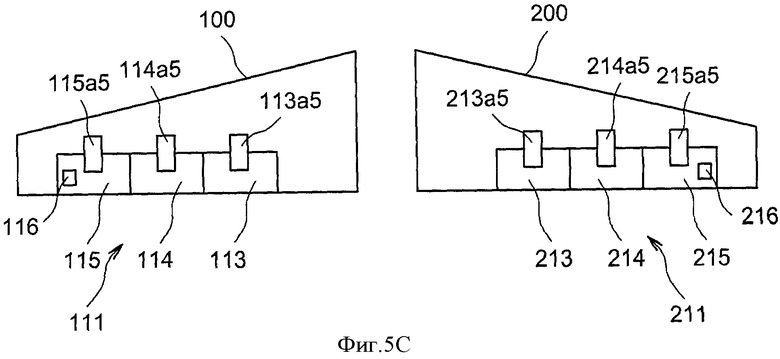
Согласно варианту, изображенному на фиг.2В, каждый элерон, т.е. левый элерон 111 и правый элерон 211 может быть разделен на три независимые поверхности (соответственно, 113-115 и 213-215).
Таким образом, разделение элеронов 111, 211 на независимые поверхности 113-215 позволяет уменьшить последствия заедания одной из этих поверхностей, обеспечивая в то же время исключение соответствующей гидравлической части.
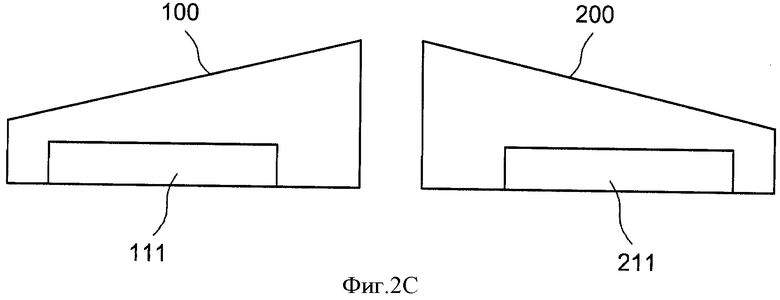
Вместе с тем, как показано на фиг.2С, каждый элерон 111, 211 можно не разделять на части, оставляя его цельным (как показано на фиг.1).
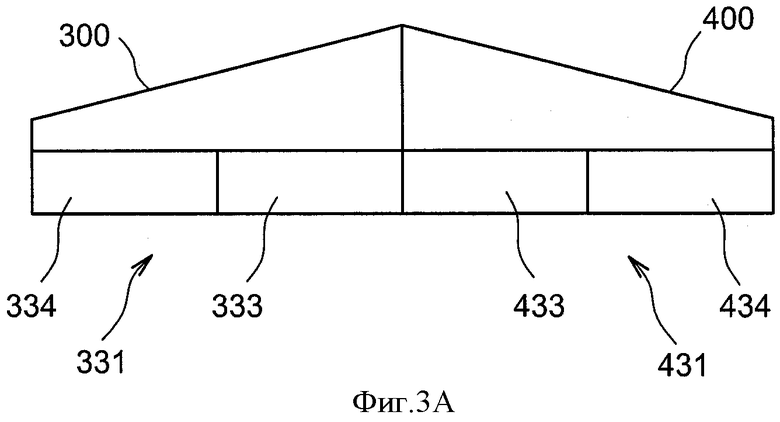
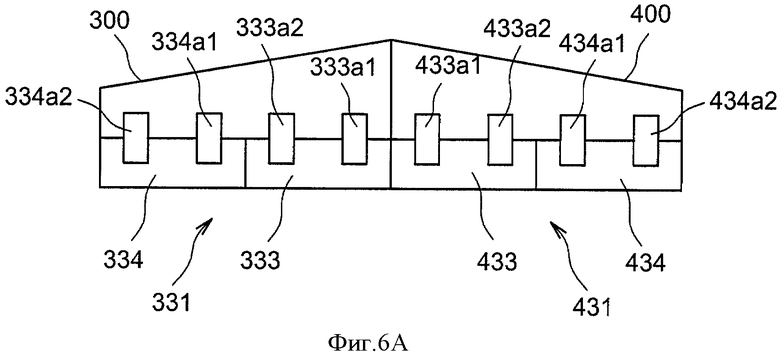
Как показано на фиг.3А, каждый руль высоты можно разделить на две независимые поверхности. В частности, левая и правая части 300 и 400 горизонтальной поверхности хвостового оперения содержат левый и правый рули 331 и 431 высоты. Левый руль 331 высоты состоит из двух независимых поверхностей 333 и 334, а правый руль высоты 431 - из двух независимых поверхностей 433 и 434.
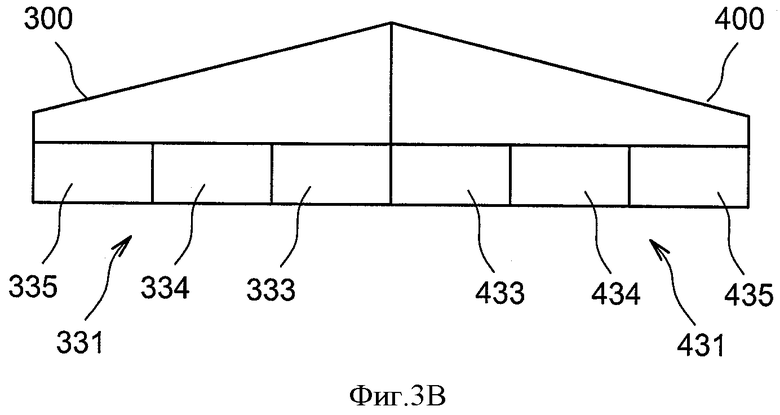
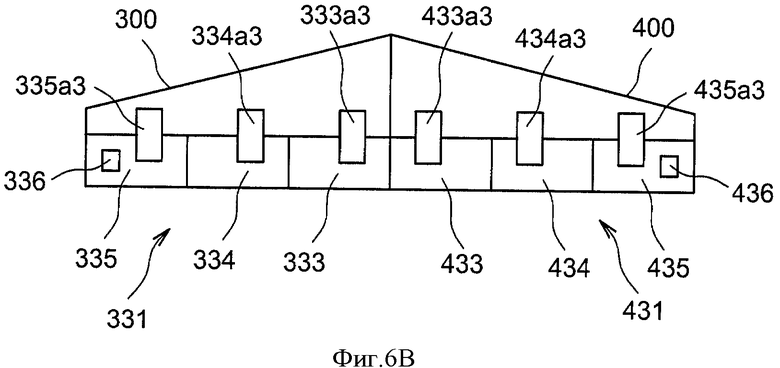
В варианте, изображенном на фиг.3В, показано, что каждый из рулей 331 и 431 высоты может быть разделен на три независимые поверхности 333-335 и 433-435 соответственно.
Разделение рулей 331 и 431 высоты позволяет использовать силовые приводы ЭСП и соответственно удалять гидравлическую часть из горизонтальной плоскости 300, 400 хвостового оперения.
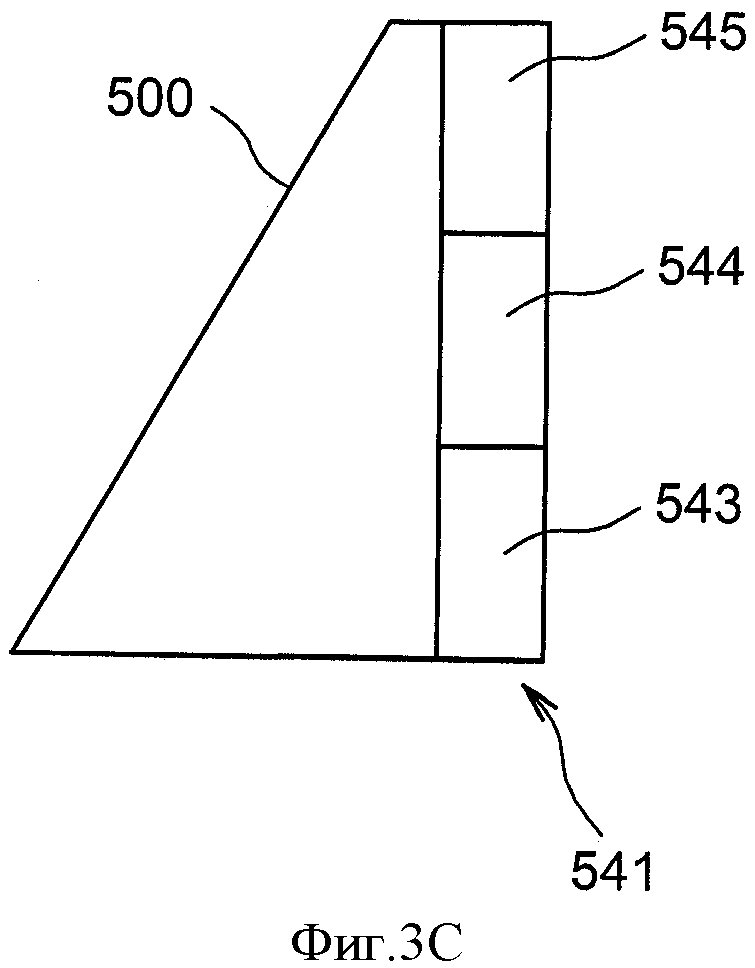
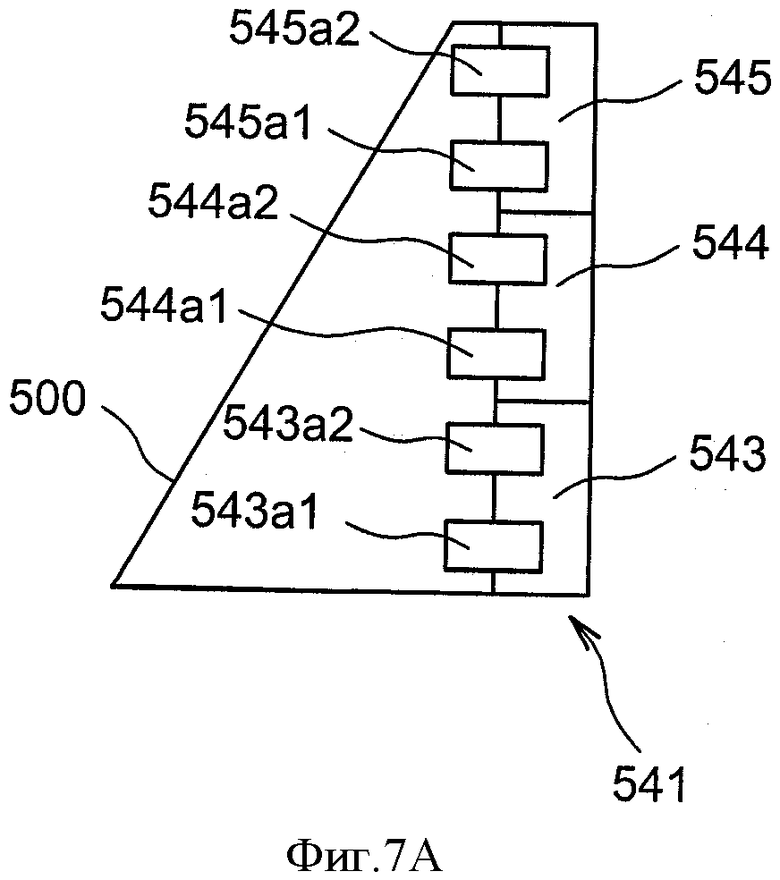
На фиг.3С показана вертикальная поверхность 500 хвостового оперения, содержащая руль 541 направления, состоящий из трех независимых поверхностей 543, 544 и 545. Преимущественно руль направления разделен на три независимые поверхности равной эффективности, и каждая независимая поверхность может приводиться в действие одним, двумя или даже большим количеством силовых приводов.
Таким образом, заклинивание одной независимой поверхности (например, 543) приводит к рысканью летательного аппарата. Однако вторая поверхность (например, 545), имеющая такую же эффективность по этой же оси, позволяет противодействовать рысканью за счет управления ее положением в противоположном направлении. Кроме того, третья поверхность 544 позволяет обеспечивать минимальное управление по рысканию.
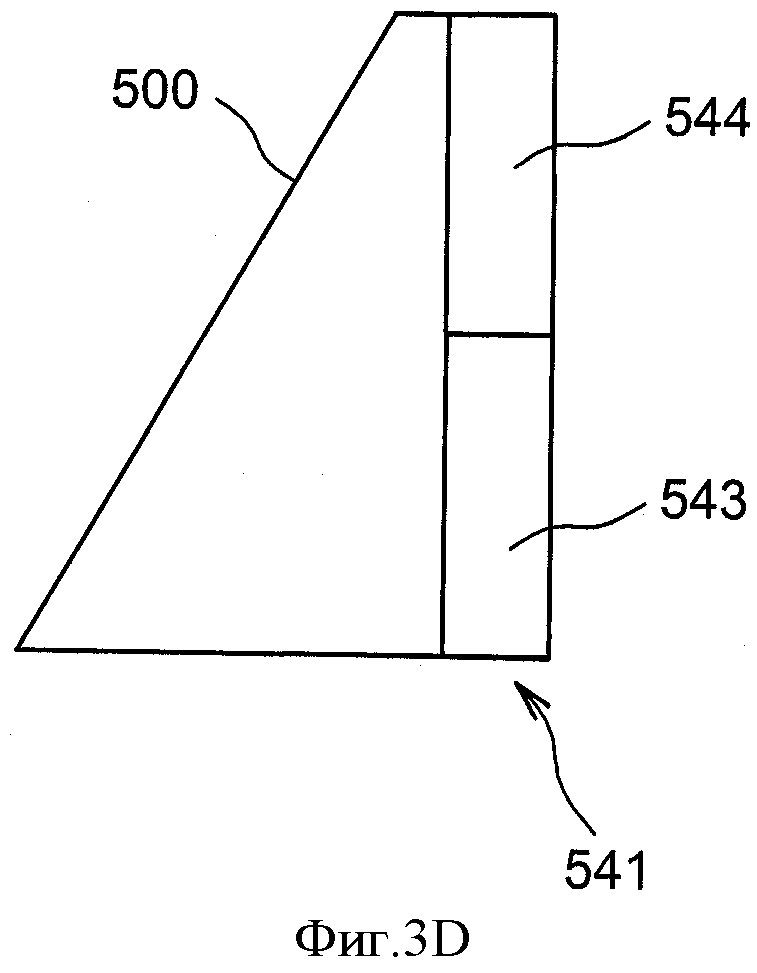
На фиг.3D представлен вариант, согласно которому руль 541 направления состоит из двух независимых поверхностей 543 и 544. Такой тип разделения может применяться в летательном аппарате с одним двигателем.
Разделение руля 541 направления позволяет использовать силовые приводы ЭСП и соответственно удалять гидравлическую часть из вертикальной плоскости 500 хвостового оперения. Преимущественно при разделении рулей высоты 331, 431 и рулей направления 541 может быть удалена гидравлическая часть из всего хвостового оперения.
Следует отметить, что каждая из независимых поверхностей может приводиться в действие одним, двумя и даже большим количеством силовых приводов ЭСП, которые могут быть распределены несколькими способами.
В общем, каждая из цельных рулевых поверхностей или независимых поверхностей разделенной рулевой поверхности управляется по меньшей мере одним силовым приводом ЭСП.
В частности, каждая из цельных рулевых поверхностей или независимых поверхностей может управляться по меньшей мере двумя силовыми приводами ЭСП, которые преимущественно могут содержать по меньшей мере два одновременно функционирующих силовых привода ЭСП. Это позволяет уменьшить размеры силовых приводов и облегчить тем самым их внедрение в конструкцию самолета.
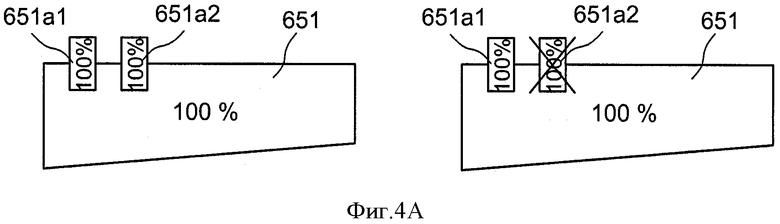
На фиг.4А-4D изображены различные варианты распределения силовых приводов и их мощности в случае, когда два силовых привода ЭСП используются для рулевой поверхности или независимой поверхности.
На фиг.4А изображен первый вариант, согласно которому два силовых привода ЭСП 651a1 и 651а2 направляют цельную рулевую поверхность 651. При этом каждый из двух силовых приводов ЭСП 651a1 и 651а2 сам по себе может обеспечивать все летно-технические характеристики. Таким образом, отказ силового привода не оказывает никакого непосредственного влияния на летно-технические характеристики летательного аппарата.
Согласно этому варианту номинальная располагаемая мощность составляет 200% по сравнению с требуемой мощностью, составляющей 100%. Соответственно располагаемая мощность после отказа силового привода 651а2 составляет 100%. В этом случае вес силовых приводов по сравнению с требуемой мощностью составляет 200% и соответственно эффективность конструкции, соответствующей этому варианту, составляет 50%. Эффективность конструкции определяется как соотношение между «располагаемой мощностью в случае отказа силового привода» и «весом силовых приводов по сравнению с требуемой мощностью».
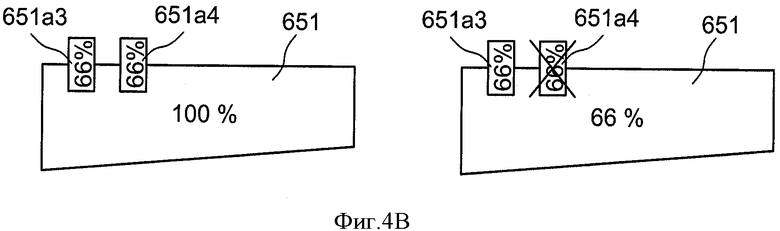
На фиг.4В показан второй вариант, согласно которому используются два силовых привода ЭСП меньшего размера, функционирующие одновременно для обеспечения всех летно-технических характеристик в номинальном режиме. В случае выхода из строя одного силового привода обеспечиваются пониженные летно-технические характеристики.
Следует отметить, что мощность силового привода, необходимая для движения заданной поверхности, пропорциональна площади этой поверхности. Аналогично вес силового привода пропорционален мощности этого силового привода. Таким образом, разделение привода, действующего на одну поверхность, на два одновременно действующих силовых привода ЭСП позволяет складывать их мощности и оптимизировать определение их мощности и уменьшать их размеры.
Фактически, на фиг.4В показано два силовых привода 651а3 и 651а4, одновременно направляющих рулевую поверхность 651, при этом каждый из двух силовых приводов ЭСП 651а3 и 651а4 обеспечивает 66% мощности. Согласно этому варианту номинальная располагаемая мощность составляет 133% по сравнению с требуемой, а в случае отказа силового привода 651а4 располагаемая мощность составляет 66%. В этом случае вес силовых приводов по сравнению с требуемой мощностью составляет 133% и соответственно эффективность конструкции, соответствующей этому варианту, составляет 50%.
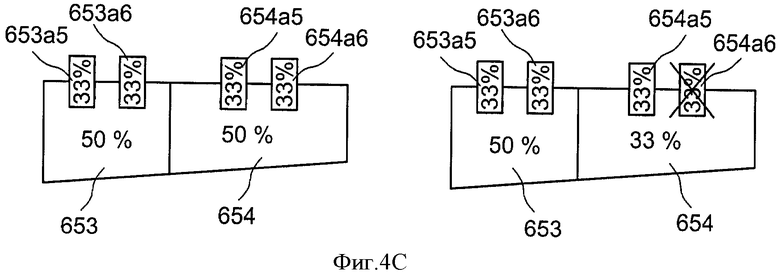
На фиг.4С показан третий вариант, согласно которому преимущество одновременного функционирования силовых приводов ЭСП комбинируется с преимуществом разделения рулевых поверхностей.
Фактически, разделение рулевых поверхностей вызывает меньшие потери аэродинамической эффективности при отказе силового привода, поскольку большинство быстродействующих поверхностей остается на 100% пригодным для использования. Это позволяет даже дополнительно оптимизировать мощность силовых приводов, предлагая режим «активный-активный» для всех фрагментов.
В частности, как показано на фиг.4С, рулевая поверхность 651 разделена на две независимые поверхности 653 и 654. Первая независимая поверхность 653 направляется двумя одновременно функционирующими силовыми приводами ЭСП 653а5 и 653а6, а вторая независимая поверхность 654 направляется двумя одновременно функционирующими силовыми приводами ЭСП 654а5 и 654а6. Каждый из силовых приводов ЭСП 653а5-654а6 обеспечивает 33% мощности.
Согласно этому варианту номинальная располагаемая мощность составляет 66% на каждую независимую поверхность 653 и 654 по сравнению с требуемой мощностью, которая составляет 50%. Соответственно располагаемая мощность на всех поверхностях в случае отказа силового привода 654а6 составляет 83%. В этом случае вес силовых приводов по сравнению с требуемой мощностью составляет 133% и соответственно эффективность конструкции, соответствующей этому варианту, составляет 62%.
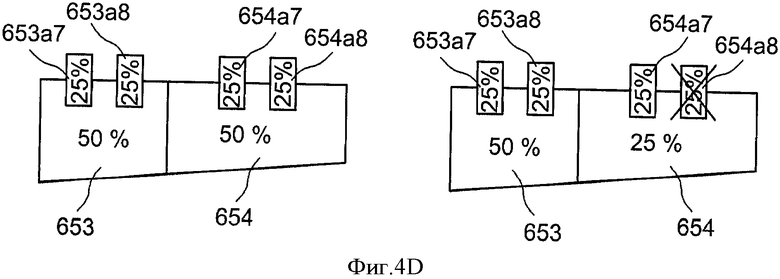
И, наконец, вариант, показанный на фиг.4D, является вариантом конструкции, показанной на фиг.4С, и содержащей две независимые поверхности 653 и 654. Каждая из независимых поверхностей 653 и 654 одновременно направляется двумя силовыми приводами ЭСП 653а7, 653а8 и 654а7, 654а8, при этом каждый из силовых приводов ЭСП 653а7-654а8 обеспечивает 25% мощности. Согласно этому четвертому варианту номинальная располагаемая мощность составляет 50% на каждую поверхность по сравнению с требуемой мощностью, которая также составляет 50%, и соответственно располагаемая мощность на всех поверхностях при отказе одного силового привода составляет 75%. В этом случае вес силовых приводов по сравнению с требуемой мощностью составляет 100% и соответственно эффективность конструкции, соответствующей этому варианту, составляет 75%.
Эти различные варианты позволяют сравнивать и тем самым оптимизировать определение мощности силовых приводов ЭСП. Следует отметить, что для этих вариантов не обязательно обеспечивать 100% требуемой мощности для перемещения рулевой поверхности. Обеспечение менее 100% мощности не препятствует перемещению рулевой поверхности, а просто снижает его динамику.
Кроме того, для рулевой или быстродействующей поверхности может использоваться только один силовой привод ЭСП. Такое решение позволяет значительно уменьшить количество силовых приводов на летательный аппарат.
Однако в этом случае преимущественно следует предотвратить возможность возникновения флаттера поверхностей при разрушении соединительного элемента силового привода.
В этом случае поверхность может быть сбалансирована, например, посредством расположения ее центра тяжести на оси шарнира для обеспечения затухания колебаний. Обычное решение состоит в использовании удлиненной хорды, например на элеронах, рулях высоты и рулях направления в диапазоне ATR.
Например, в случае когда каждая из независимых поверхностей по меньшей мере одной группы разделенных рулевых поверхностей управляется одним электромеханическим силовым приводом, можно обеспечить, чтобы по меньшей мере одна независимая поверхность, принадлежащая группе разделенных рулевых поверхностей, содержала средства балансировки.
В общем, наибольшей балансировки, прежде всего, требует быстродействующая поверхность, наиболее далеко расположенная от фюзеляжа летательного аппарата. Таким образом, средство балансировки может быть преимущественно установлено на каждой независимой поверхности, принадлежащей группе разделенных рулевых поверхностей, расположенной на наиболее удаленном конце по отношению к фюзеляжу летательного аппарата.
На фиг.5А-8В показаны различные варианты распределения силовых приводов ЭСП на различных разделенных или неразделенных рулевых поверхностях системы основного управления полетом.
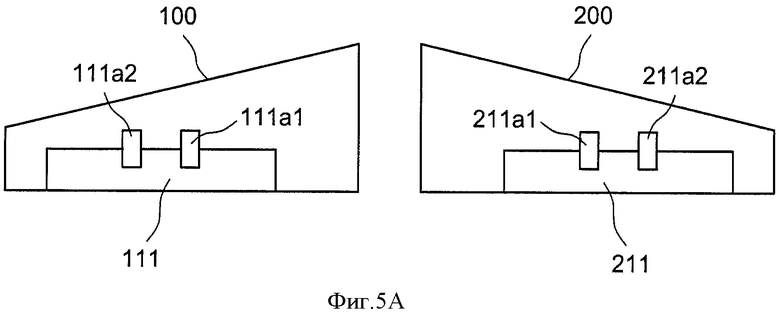
На фиг.5А изображен цельный левый элерон 111, приводимый в действие двумя одновременно функционирующими силовыми приводами ЭСП 111a1 и 111а2, и цельный правый элерон 211, приводимый в действие двумя одновременно функционирующими силовыми приводами ЭСП 211a1 и 211а2.
На фиг.5В показан левый элерон 111, состоящий из двух независимых поверхностей 113 и 114, и правый элерон 211, состоящий из двух независимых поверхностей 213 и 214. Каждая из независимых поверхностей 113, 114, 213 и 214 приводится в действие двумя силовыми приводами ЭСП 113а3 и 113а4, 114а3 и 114а4, 213а3 и 213а4 и 214а3 и 214а4 соответственно, предпочтительно функционирующими в режиме «активный - активный». Таким образом, согласно этой конфигурации восемь силовых приводов ЭСП используются для четырех независимых поверхностей элерона.
На фиг.5С показывает левый элерон 111, состоящий из трех независимых поверхностей 113, 114 и 115, и правый элерон 211, состоящий из трех независимых поверхностей 213, 214 и 215. Каждая из независимых поверхностей 113-215 приводится в действие одним силовым приводом ЭСП 113а5-215а5 соответственно. В зависимости от ситуации каждая из наиболее удаленных независимых поверхностей 115 и 215 содержит устройства 116 и 216 балансировки соответственно. Таким образом, согласно этой конфигурации шесть силовых приводов ЭСП используются для шести независимых поверхностей элерона, при этом для двух наружных поверхностей 115 и 215 используются два средства балансировки 116 и 216.
На фиг.6А показан левый руль высоты 331, разделенный на две независимые поверхности 333 и 334, и правый руль высоты 431, разделенный на две независимые поверхности 433 и 434. Каждая из независимых поверхностей 333-434 приводится в действие двумя силовыми приводами ЭСП 333а1 и 333а2, 334а1 и 334а2, 433а1 и 433а2, 434а1 и 434а2 соответственно, предпочтительно функционирующими в режиме «активный - активный». Таким образом, согласно этой конфигурации восемь силовых приводов ЭСП используются для четырех независимых поверхностей руля высоты.
На фиг.6В изображен левый руль высоты 331, разделенный на три независимые поверхности 333, 334 и 335, и правый руль высоты 431, разделенный на три независимые поверхности 433, 434 и 435. Каждая из независимых поверхностей 333-435 приводится в действие одним силовым приводом ЭСП 333а3-435а3 соответственно. В зависимости от ситуации каждая из наиболее удаленных независимых поверхностей 335 и 435 содержит устройства 336 и 436 балансировки соответственно. Таким образом, согласно этой конфигурации шесть силовых приводов ЭСП используются для шести независимых поверхностей руля высоты, и для двух наружных поверхностей 335 и 435 используются два средства 336 и 436 балансировки.
На фиг.7А показан руль 541 направления, разделенный на три независимые поверхности 543, 544 и 545. Каждая из независимых поверхностей 543-545 приводится в действие двумя силовыми приводами ЭСП 543а1 и 543а2, 544а1 и 544а2, 545а1 и 545а2 соответственно, предпочтительно функционирующими в режиме «активный - активный». Таким образом, согласно этой конфигурации шесть силовых приводов ЭСП используются для трех независимых поверхностей руля.
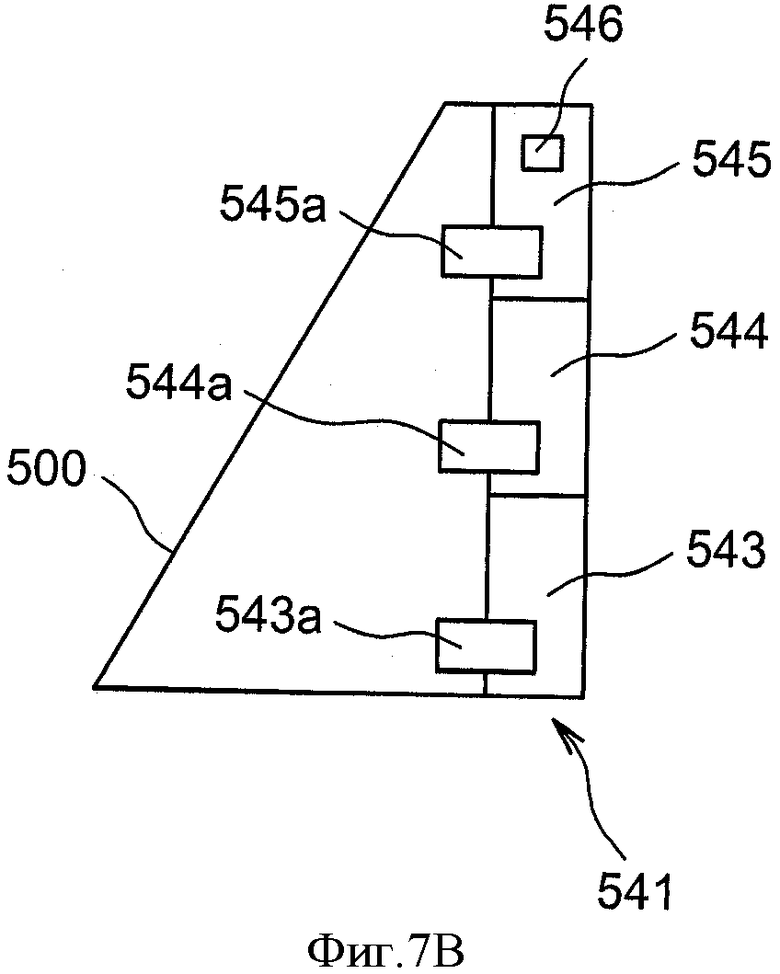
На фиг.7В изображен вариант, согласно которому каждая из трех независимых поверхностей 543-545 приводится в действие одним силовым приводом ЭСП 543а, 544а и 545а, а наиболее удаленная от фюзеляжа независимая поверхность 545 содержит средство 546 балансировки. Таким образом, согласно этой конфигурации три силовых привода ЭСП используются для трех независимых поверхностей руля, и достаточным является использование средства 546 балансировки только для независимой верхней поверхности 545.
Следует отметить, что конфигурации, изображенные на фиг.7А и 7В, также могут использоваться для руля направления, разделенного на две независимые поверхности, как показано на фиг.3D.
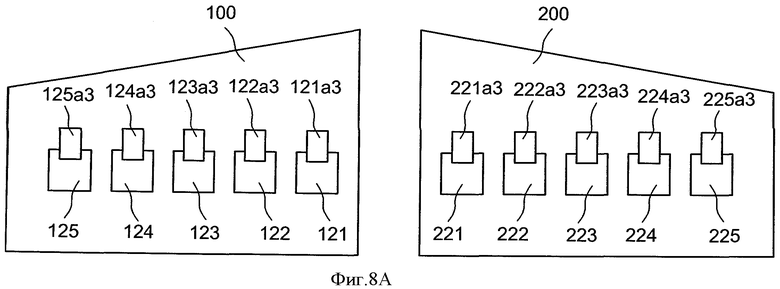
На фиг.8А показаны левые аэродинамические тормоза и правые аэродинамические тормоза. Эта фигура в качестве примера показывает пять аэродинамических тормозов 121-125 и 221-225 соответственно, на каждой из консолей 100 и 200 крыла. Каждый из этих аэродинамических тормозов 121-225 приводится в действие одним силовым приводом ЭСП 121а3-225а3. Если требуется, каждый аэродинамический тормоз может быть разделен на две независимые поверхности. Таким образом, имеется возможность, например, использовать десять силовых приводов ЭСП для десяти независимых поверхностей аэродинамических тормозов на консоль крыла.
Следует отметить, что аэродинамические тормоза являются быстродействующими поверхностями, которые должны оставаться зафиксированными в случае потери мощности силового привода. Классическое решение состоит в использовании средств предохранения от отключения питания или системы с храповым колесом.
В соответствии с настоящим изобретением используется силовой привод ЭСП, сконфигурированный по необратимой схеме передачи движения. Необратимость силового привода ЭСП может быть обеспечена средством преобразования вращательного движения в поступательное. Это средство преобразования может содержать шариковый или роликовый ходовой винт или даже простой винт. Необратимость устройства позволяет исключить средства, вызывающие потерю мощности, или храповое колесо.
Таким образом, в случае потери мощности нереверсивный силовой привод ЭСП может поддерживать аэродинамические тормоза в зафиксированном состоянии. Это дает возможность уменьшить расходы на преобразовательное устройство, в то же время исключая необходимость в наличии средств предохранения от отключения питания или какого-либо другого средства, предотвращающего движение.
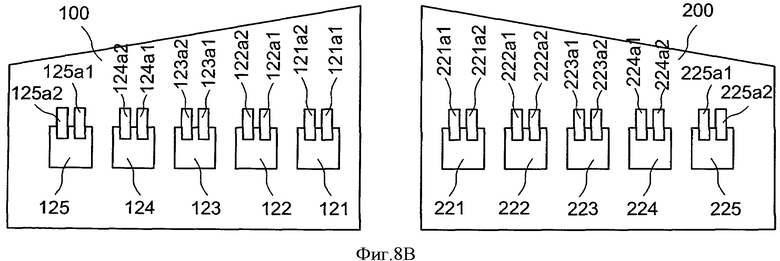
На фиг.8В показан вариант, согласно которому каждый аэродинамический тормоз 121-225 приводится в действие одновременно двумя силовыми приводами ЭСП с 121a1 и 121а2 по 225а1 и 225а2 соответственно. Например, для одной консоли крыла может использоваться от восьми до двадцати аэродинамических тормозов и соответственно от шестнадцати до сорока силовых приводов ЭСП.
Следует отметить, что во всех примерах, показанных на фиг.5А-7В и 8В, силовые приводы ЭСП являются реверсивными. В частности, в вариантах, в которых используются по меньшей мере два силовых привода ЭСП на цельную или независимую рулевую поверхность, реверсивные силовые приводы обеспечивают перемещения рулевой или независимой поверхности, если один из силовых приводов вышел из строя (за исключением заедания). Преимущественно различные силовые приводы, связанные с рулевой поверхностью, получают питание от по меньшей мере двух разных и раздельных источников питания так, чтобы вероятность потери мощности всех силовых приводов, связанных с вышеуказанной рулевой поверхностью, была ниже 10-9 на час полета. В примере, показанном на фиг.8В, преимущество состоит в том, что имеется возможность удалить известные средства предохранения от отключения питания или системы с храповым колесом.
Легко понять, что возможны все комбинации конфигураций, показанных на фиг.5А-8В. Преимущественно конфигурации могут быть скомбинированы так, чтобы все электромеханические силовые приводы, связанные с рулевыми поверхностями и управляющие по меньшей мере двумя летными функциями, были идентичными. Это дает возможность установить одинаковые электромеханические силовые приводы на всех поверхностях, требующих мощности одного порядка.
В частности, комбинация конфигураций, показанных на фиг.5В, 6А, 7А и 8В (соответственно на фиг.5С, 6В, 7В и 8А), позволяет установить один и тот же силовой привод ЭСП на всех быстродействующих поверхностях элеронов 111, 211, рулях высоты 331, 431 и рулях направления 541, а также аэродинамических тормозах 121-225. Эта стандартизация силовых приводов позволяет увеличить объемы производства, облегчить проектирование и техническое обслуживание и соответственно уменьшить расходы.
Кроме того, настоящее изобретение позволяет перейти к полностью электрифицированной системе основного управления полетом посредством использования силовых приводов ЭСП на аэродинамических тормозах 121-225 и элеронах 111, 211 (разделенных или неразделенных) и на разделенных рулях высоты 331, 431 и направления 541.
На фиг.9 показан вариант выполнения структуры системы управления согласно изобретению, которая может быть использована, например, в обычном летательном аппарате средней дальности. Эта структура содержит три электрические цепи 601, 602 и 603, подача питания к которым осуществляется двумя независимыми двигателями 610 и 620 летательного аппарата.
Первый и второй двигатели 610 и 620 приводят в действие соответственно первый и второй генераторы 611 и 621 переменной частоты (ГПЧ) и первый и второй генераторы 613 и 623 с постоянным магнитом (ГПМ).
Первый и второй генераторы ГПЧ 611 и 621 подают токи переменной частоты соответственно в первую и вторую электрические цепи 601 и 602.
Первый и второй генераторы ГПМ 613 и 623 подают токи постоянной частоты в третью электрическую цепь 603.
Генераторы ГПМ 613 и 623 могут использоваться совместно для питания третьей цепи 603. Как вариант третья цепь 603 может питаться от любого из генераторов ГПМ 613 и 623.
Преимущественно для питания третьей цепи 603 может использоваться турбина 633 резервного энергоснабжения (РТ) с приводом от набегающего потока.
На этой фигуре показана также система основного управления на консолях 100, 200 крыла и хвостовом оперении 300, 400 и 500 летательного аппарата.
Согласно этому варианту осуществления изобретения система основного управления содержит две независимые поверхности 113, 114 левого элерона 111, две независимые поверхности 213, 214 правого элерона 211, две независимые поверхности 333, 334 левого руля высоты 331, две независимые поверхности 433, 434 правого руля высоты 431 и три независимые поверхности 543, 544, 545 руля 541 направления.
Система основного управления также содержит пять левых аэродинамических тормозов 121-125 и пять правых аэродинамических тормозов 221-225.
Преимущественно каждая из трех электрических цепей 601, 602, 603 может использоваться для обеспечения отдельного управления полетом летательного аппарата по всем этим осям.
Например, каждая независимая поверхность элерона может управляться двумя силовыми приводами, соединенными соответственно с первой и третьей электрическими цепями 601, 603 или со второй и третьей электрическими цепями 602, 603. Десять аэродинамических тормозов 121-225 могут управляться десятью силовыми приводами, при этом четыре силовых привода соединены с первой электрической цепью 601, четыре других силовых привода соединены со второй электрической цепью 602, и два последних силовых привода соединены с третьей электрической цепью 603. Каждая из двух первых независимых поверхностей руля высоты может управляться двумя силовыми приводами, соединенными соответственно с первой и третьей электрическими цепями 601, 603, а каждая из двух вторых независимых поверхностей руля высоты может управляться двумя силовыми приводами, соединенными соответственно со второй и третьей электрическими цепями 602, 603. И, наконец, каждая независимая поверхность руля может управляться двумя силовыми приводами, соединенными соответственно с двумя электрическими цепями из трех различных комбинаций электрических цепей.
В частности, первая электрическая цепь 601 используется для управления одним из двух силовых приводов ЭСП, связанных с независимыми наружными поверхностями 114, 214 левого и правого элеронов (т.е. силовыми приводами 114а1 и 214а1), независимыми наружными поверхностями 334, 434 левого и правого рулей высоты (т.е. силовыми приводами 334а1 и 434а1) и независимыми промежуточной 544 и верхней 545 поверхностями руля (т.е. силовыми приводами 544а1 и 545а1). Первая электрическая цепь 601 также используется для управления силовыми приводами, связанными соответственно с двумя левыми аэродинамическими тормозами 121a1, 123a1 и двумя правыми аэродинамическими тормозами 22la1, 223a1.
Вторая электрическая цепь 602 используется для управления одним из двух силовых приводов ЭСП, связанных соответственно с независимыми внутренними поверхностями 113, 213 левого и правого элеронов (т.е. силовыми приводами 113а2 и 213а2), независимыми внутренними поверхностями 333, 433 левого и правого рулей высоты (т.е. силовыми приводами 333а2, 433а2), и независимыми нижней 543 и промежуточной 544 поверхностями руля (т.е. силовыми приводами 543а2 и 544а2). Вторая электрическая цепь 602 также используется для управления силовыми приводами 122а2, 124а2, 222а2 и 224а2, связанными соответственно с двумя левыми аэродинамическими тормозами 122, 124 и двумя правыми аэродинамическими тормозами 222, 224.
Третья электрическая цепь 603 используется для управления одним из двух силовых приводов ЭСП, связанных соответственно с независимыми внутренними 113, 213 и наружными 114, 214 поверхностями левого и правого элеронов (т.е. силовыми приводами 113а3, 213а3, 114а3 и 214а3), независимыми внутренними 333, 433 и наружными 334, 434 поверхностями левого и правого рулей высоты (т.е. силовыми приводами 333а3, 433а3, 334а3 и 434а3) и независимыми нижней 543 и верхней 545 поверхностями руля (т.е. силовыми приводами 543а3 и 545а3). Третья электрическая цепь 603 также используется для управления силовыми приводами 125а3, 225а3, связанными соответственно с левым аэродинамическим тормозом 125 и правым аэродинамическим тормозом 225.
На фиг.10 показано распределение силовых приводов по электрической цепи согласно примеру, представленному на фиг.9. В этом случае электрические цепи также могут подавать питание на другие органы управления самолета.
Рамки на этой фигуре относятся соответственно к органам управления элеронов 113-214; аэродинамических тормозов 121-225; рулей 333-434 высоты; руля 543-545 направления; регулируемого в горизонтальной плоскости силового привода РСП 711,712; предкрылков и тормозов концевого обтекателя крыла (ТК) 721, 723; закрылков и ТК 732, 733; тормозной системы 741, 743; реверсам 751, 752 тяги, главного шасси (ГШ) 761, 762, носового шасси (НШ) и управления носовым колесом (УНК) 773.
В частности, первая электрическая цепь 601 может использоваться для управления силовыми приводами, относящимися к левой стороне РСП 711, предкрылкам и ТК 721, тормозной системе 741, реверсам 751 тяги первого мотора 610 и левой стороне ГШ 761.
Вторая электрическая цепь 602 также может использоваться для управления силовыми приводами, относящимися к правой стороне РСП 712, закрылкам и ТК 732, реверсерам 752 тяги второго двигателя 620 и правой стороне ГШ 762.
Третья электрическая цепь 603 также может использоваться для управления силовыми приводами, относящимися к предкрылкам и ТК 723, закрылкам и ТК 733, тормозной системе 743 и НШ и УДК 773.
Изобретение также относится к самолету, оборудованному описанной выше системой управления полетом.
Таким образом, система управления полетом согласно изобретению позволяет получить более электрифицированный летательный аппарат (удалена гидравлическая система) с надежными и более дешевыми силовыми приводами ЭСП и обеспечивает стандартизацию силовых приводов ЭСП за счет выбора размеров панелей или независимых поверхностей, соотносимых с требуемой мощностью силовых приводов. Это позволяет устанавливать одни и те же силовые приводы на все быстродействующие поверхности летательного аппарата. Разделение рулевых поверхностей позволяет уменьшить требования к силовым приводам (в частности, в отношении заклинивания, защиты от выпуска и демпфирования) и позволяет использовать силовые приводы небольшого размера для их лучшего встраивания в конструкцию летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВЫХ ПРИВОДОВ ТРАНСПОРТНОГО САМОЛЕТА | 2016 |
|
RU2654654C2 |
| Система дистанционного управления региональным самолётом | 2022 |
|
RU2795074C1 |
| СИСТЕМА РУЛЕВЫХ ПОВЕРХНОСТЕЙ С ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРИВОДАМИ ДЛЯ УПРАВЛЕНИЯ ОСНОВНЫМИ ЛЕТНЫМИ ФУНКЦИЯМИ САМОЛЕТА | 2016 |
|
RU2622321C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2493053C1 |
| СПОСОБ ИЗМЕНЕНИЯ РЕЖИМА ПОЛЕТА ВОЗДУШНОГО СУДНА В ЗАПРЕТНОЙ ЗОНЕ | 2010 |
|
RU2445579C2 |
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| СИСТЕМА ЭНЕРГОПИТАНИЯ РУЛЕВЫХ ПРИВОДОВ ПЕРВИЧНЫХ ОРГАНОВ УПРАВЛЕНИЯ ПАССАЖИРСКОГО САМОЛЕТА | 2015 |
|
RU2598926C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2089447C1 |
Изобретение относится к области управления летательным аппаратом (ЛА) и касается системы основного управления ЛА. Система управления полетом содержит рулевые поверхности и связанные с ними силовые приводы для управления летными функциями крена, рыскания, тангажа и аэродинамического торможения ЛА. Все силовые приводы являются электромеханическими. При этом часть рулевых поверхностей, связанных с электромеханическими силовыми приводами, представляет собой разделенные рулевые поверхности, каждая из которых состоит из независимых поверхностей. Достигается надежность, прочность, простота системы управления полетом. 10 з.п. ф-лы, 24 ил.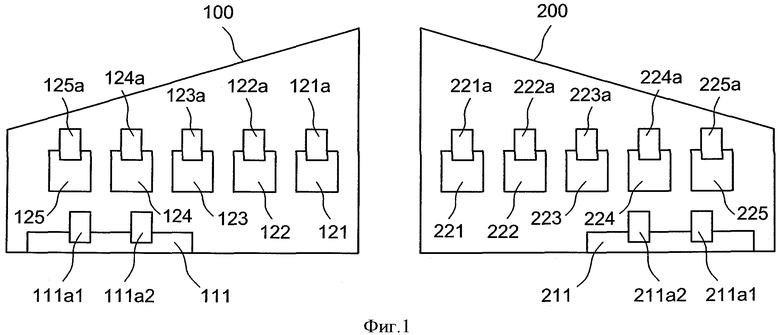
1. Система управления полетом летательного аппарата, содержащая рулевые поверхности (111, 211, 331, 431, 541, 121-225) и связанные с ними силовые приводы для управления летными функциями крена, рыскания, тангажа и аэродинамического торможения летательного аппарата, отличающаяся тем, что все силовые приводы (111a1-211а2, 121а-225а), связанные с рулевыми поверхностями, управляющими по меньшей мере одной из вышеуказанных летных функций, являются электромеханическими, а часть указанных рулевых поверхностей, связанных с электромеханическими силовыми приводами, представляет собой разделенные рулевые поверхности (111, 211, 331, 431, 541), каждая из которых состоит из по меньшей мере двух независимых поверхностей (113, 114, …, 545).
2. Система управления по п.1, отличающаяся тем, что указанная часть разделенных рулевых поверхностей содержит разделенные рули высоты (333, 334, 433, 434), и/или разделенные рули (543, 544, 545) направления, и/или разделенные элероны (113, 114, 115, 213, 214,215).
3. Система управления по п.1 или 2, отличающаяся тем, что указанная часть разделенных рулевых поверхностей содержит разделенные рули высоты, и/или рули направления, и/или элероны, причем каждый разделенный руль высоты состоит из двух независимых поверхностей (333, 334, 433 434) руля высоты, каждый разделенный руль направления состоит из двух независимых поверхностей (543, 544, 545) руля направления, а каждый разделенный элерон состоит из двух независимых поверхностей (113, 114, 213, 214) элерона.
4. Система управления по п.1 или 2, отличающаяся тем, что указанная часть разделенных рулевых поверхностей содержит рули высоты, и/или рули направления, и/или элероны, причем каждая из указанных разделенных рулевых поверхностей состоит из трех независимых поверхностей.
5. Система управления по п.1, отличающаяся тем, что каждая из независимых поверхностей разделенной рулевой поверхности управляется по меньшей мере одним электромеханическим силовым приводом.
6. Система управления по п.5, отличающаяся тем, что каждая из независимых поверхностей разделенной рулевой поверхности управляется по меньшей мере двумя электромеханическими силовыми приводами, включающими в себя по меньшей мере два одновременно функционирующих электромеханических силовых привода.
7. Система управления по любому из пп.1, 2, 5, отличающаяся тем, что каждая из независимых поверхностей по меньшей мере одной группы разделенных рулевых поверхностей управляется одним электромеханическим силовым приводом, причем по меньшей мере одна независимая поверхность (115, 215), принадлежащая указанной группе разделенных рулевых поверхностей, содержит средства (116, 216) балансировки.
8. Система управления по любому из пп.1, 2, 5, 6, отличающаяся тем, что каждая рулевая поверхность, принадлежащая рулевым поверхностям (121, …, 225) аэродинамических тормозов, управляющих функцией аэродинамического торможения летательного аппарата, управляется одним электромеханическим силовым приводом (121а, …, 225а).
9. Система управления по п.8, отличающаяся тем, что электромеханический силовой привод сконфигурирован по необратимой схеме передачи движения, причем необратимость этого электромеханического силового привода обеспечивается устройством преобразования вращательного движения в поступательное.
10. Система управления по любому из пп.1, 2, 5, 6, 9, отличающаяся тем, что каждая рулевая поверхность, принадлежащая рулевым поверхностям (121, …, 225) аэродинамических тормозов, управляющих функцией аэродинамического торможения летательного аппарата, управляется по меньшей мере двумя электромеханическими силовыми приводами (121а1, 121а2 …, 225а2).
11. Система управления по любому из пп.1, 2, 5, 6, 9, отличающаяся тем, что все электромеханические силовые приводы, связанные с рулевыми поверхностями, управляющими по меньшей мере двумя из указанных летных функций, идентичны.
| EP 1785346 A2, 16.05.2007 | |||
| СИСТЕМА ЩИТКОВ НА КРЫЛЕ САМОЛЕТА С ЖЕСТКИМ КРЫЛОМ | 2004 |
|
RU2346851C2 |
| US 5088661 A, 18.02.1992 | |||
| US 2006043242 A1, 02.03.2006 | |||

