Изобретение относится к оборудованию летательных аппаратов и предназначено для построения системы управления полетом и реализации энергоснабжения рулевых агрегатов транспортного самолета с двумя маршевыми двигателями в нормальных и аварийных условиях полета.
Известна система рулевых приводов среднемагистрального самолета Ту-204 (http://www.aviadocs.net/RLE/). Система содержит основные электрогенераторы переменного тока, роторы которых соединены с роторами маршевых двигателей, резервный электрогенератор переменного тока, ротор которого соединен с ротором вспомогательной силовой установки, аккумуляторные батареи, преобразователи тока, выпрямители, гидравлические насосы с приводом от маршевых двигателей, турбонасосную установку с приводом от ветродвигателя, гидравлические насосные станции с электромоторами переменного тока, гидромеханические рулевые приводы элеронов, руля высоты, руля направления, интерцепторов, воздушных тормозов, стабилизатора, вращательные гидроприводы закрылков и предкрылков, гидроприводы реверса тяги двигателей, гидравлическую систему уборки-выпуска шасси, электрогидроцилиндр поворота носовой стойки шасси, гидравлические тормоза колес. В рамках указанной схемы не рассматриваются приводы вспомогательных систем: различных люков, стеклоочистителей и т.д.
К недостаткам такой системы следует отнести наличие механической проводки в каналах управления самолетом, которая значительно утяжеляет конструкцию летательного аппарата. Кроме того, механическая проводка требует дополнительного технического обслуживания, а рулевые приводы системы управления являются переразмеренными в отношении вес/развиваемое усилие. Самолет Ту-204 на сегодняшний день практически не используется отечественными авиакомпаниями.
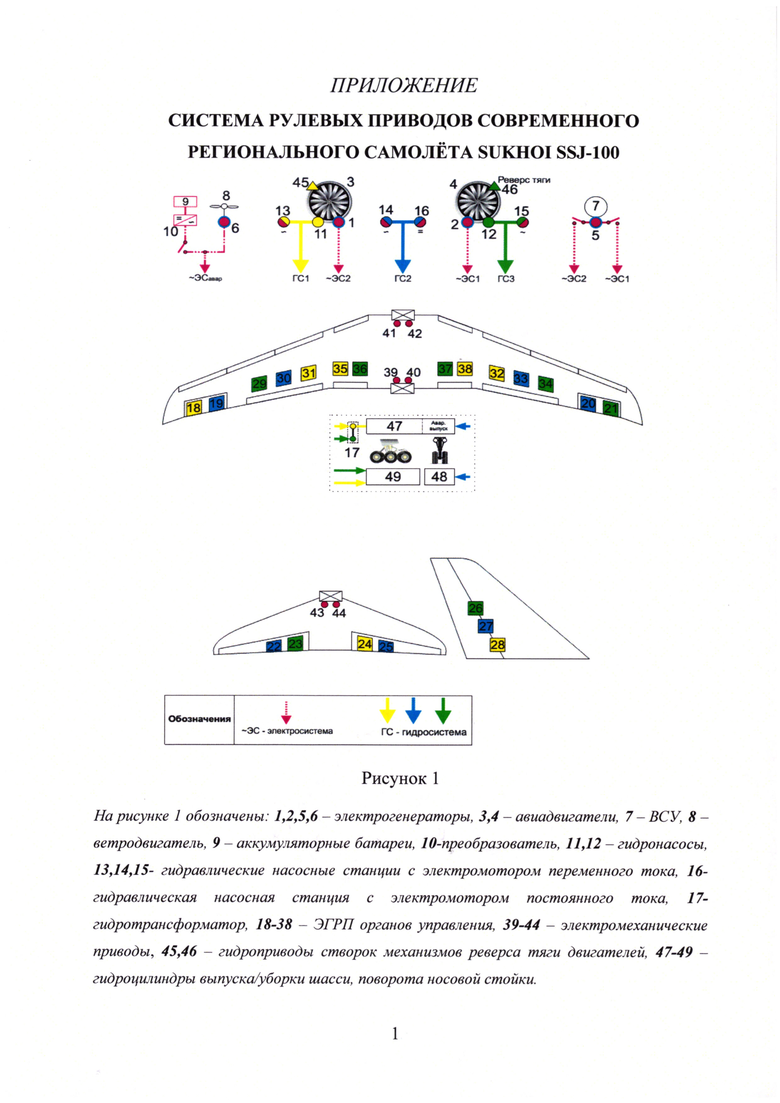
Известна также система рулевых приводов современного регионального самолета SSJ-100 (http://superj et.wikidot.com/), активно эксплуатируемого различными авиакомпаниями (см. приложение, рис. 1). Система содержит основные электрогенераторы переменного тока, роторы которых соединены с роторами маршевых двигателей, вспомогательные электрогенераторы переменного тока, роторы которых соединены с роторами вспомогательной силовой установки и турбинного агрегата, аккумуляторные батареи, преобразователи тока, гидравлические насосы с приводом от маршевых двигателей, гидравлические насосные станции с электромоторами переменного тока и аварийную гидравлическую насосную станцию с электромотором постоянного тока, гидротрансформатор, электрогидравлические рулевые приводы (ЭГРП) элеронов, руля высоты, руля направления, интерцепторов и гидроцилиндры воздушных тормозов, электромеханические рулевые приводы (ЭМРП) закрылков и предкрылков, ЭМРП стабилизатора, гидроприводы реверса тяги двигателей, гидроцилиндр уборки-выпуска шасси, гидропривод поворота носовой стойки шасси, гидравлическую тормозную систему колес.
Указанная система энергопитания предназначена для функционирования одного из трех гидравлических каналов, по которым вырабатывается энергия для питания ЭГРП. Приведенный набор электрических элементов в энергокомплексе также полностью обеспечивает нужды электроснабжения рулевых агрегатов самолета, в том числе и в аварийных ситуациях: питание ЭМРП вторичных органов управления, блоков управления ЭГРП и т.д. Такая схема считается традиционной в гражданской авиации: она широко распространена (лишь с небольшими отличиями) на различных магистральных самолетах: МС-21, Airbus A319/320, Boeing-737. В то же время именно такое схематическое решение обеспечивает прежде всего необходимый уровень безопасности полетов.
Недостаток такой системы заключается в том, что для современных самолетов приведенное построение системы рулевых приводов и бортовой системы энергоснабжения не является оптимальным и требует существенных затрат на ее эксплуатацию, вызывает значительные трудности при интеграции бортового оборудования нового поколения. Кроме того, указанная система не отличается высокими показателями весовой, энергетической и топливной эффективности. Как следует из [«Полностью электрический самолет» / С. Воронович, В. Каргопольцев, В. Кутахов // Статья в журнале «Авиапанорама». - 2009. - Вып. 2], перспективным направлением развития систем энергоснабжения самолетов следующего поколения является создание «полностью электрического самолета». На самолетах с полностью электрифицированным оборудованием гидравлические приводы, получающие энергию для своего функционирования от централизованных гидросистем (ГС), должны быть заменены на приводы с электрическим энергопитанием. Кроме того, развитие авиационной техники за рубежом, а именно появление таких самолетов, как Boeing-787, Airbus A380, свидетельствует о широком развитии концепции «более электрического» самолета.
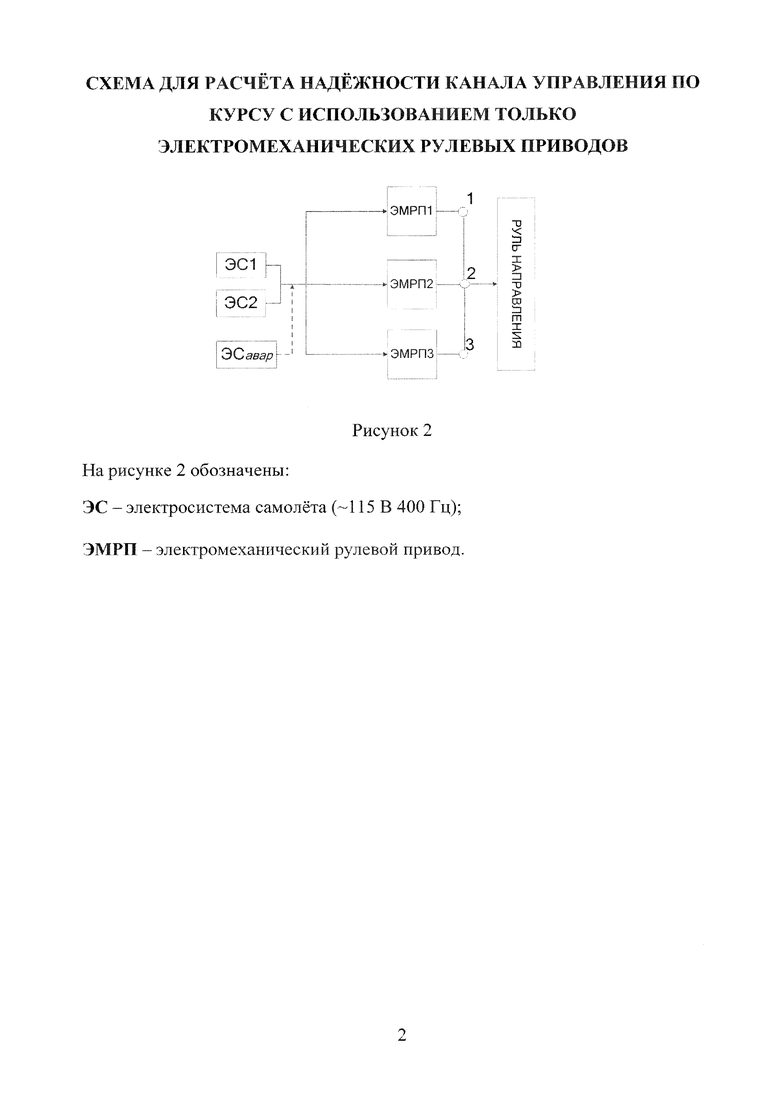
Использование рулевых приводов с электрическим энергопитанием, а вместе с тем и электрификация энергетического комплекса, обладает рядом преимуществ, а именно: снижение суммарной массы энергокомплекса самолета вместе с системой рулевых приводов, упрощение и снижение стоимости технического обслуживания, повышение унификации бортового оборудования, снижение расхода топлива, улучшение экономических и экологических показателей эксплуатации. Однако, согласно предварительному расчету (см. приложение, рис. 2), при заданных показателях надежности основных элементов современных самолетных электросистем (ЭС) и электрических приводов [Оболенский Ю.Г. Введение в проектирование систем авиационных рулевых приводов. Учебное пособие / Ю.Г. Оболенский, С.А. Ермаков, Р.В. Сухоруков. М., 2011. - 343 с.], их использование на борту невозможно исходя из требований к безопасности полета. Например, при использовании только электромеханических приводов на руле направления с двумя независимыми бортовыми ЭС (2 электрогенератора) для среднего времени полета магистрального самолета Т=5 час вероятность потери путевого канала управления составляет:

QpH=1-Ррн=(1-р1,3)⋅(1-р2)=6⋅10-8, что не удовлетворяет требованиям безопасности полетов,
где λэс, λэмрп - интенсивности отказов электросистемы и электромеханического привода соответственно:
λэс=20⋅10-6 (ч-1);
λэмрп=100⋅10-6 (ч-1).
Согласно требованиям Авиационных Правил АП-25 самолет должен быть спроектирован и построен таким образом, чтобы в ожидаемых условиях эксплуатации и действий экипажа вероятность возникновения катастрофический ситуации не превышала 10-9. Поэтому полная электрификация системы рулевых приводов, в особенности первичных органов управления, на сегодняшний день весьма преждевременна.
Техническим результатом является возможность реализации принципиально новой, нетрадиционной для отечественного авиастроения системы рулевых приводов в концепции «более электрического» магистрального самолета. Система основывается на применении рулевых приводов с электрическим энергопитанием совместно с традиционными ЭГРП. Такая реализация позволит получить следующие преимущества:
- снижение веса оборудованного самолета;
- уменьшение отбора мощности у авиадвигателей и как результат сокращение расхода топлива;
- сокращение общего числа сложных элементов гидравлических и пневматических систем;
- упрощение эксплуатационного обслуживания самолета;
- улучшение экологических условий эксплуатации в целом.
Технический результат достигается тем, что в системе рулевых приводов транспортного самолета, содержащей основные электрогенераторы переменного тока, роторы которых соединены с роторами двух маршевых двигателей, вспомогательные электрогенераторы переменного тока, роторы которых соединены с роторами вспомогательной силовой установки и турбинного агрегата, аккумуляторные батареи, преобразователи тока, электромеханические рулевые приводы предкрылков, закрылков, стабилизатора, гидравлические насосные станции с электромоторами переменного тока, электрогидравлические рулевые приводы руля высоты и руля направления, секции элеронов, интерцепторов, воздушных тормозов содержат электромеханические рулевые приводы, а наиболее ответственные органы управления содержат электрогидравлические и двухрежимные гидравлические рулевые приводы с комбинированным регулированием скорости (для руля высоты) и гидростатический рулевой привод (для руля направления), вместе с тем гидростатический рулевой привод установлен носовой стойке шасси, а электромеханические приводы установлены для реверса тяги двигателей, уборки-выпуска шасси и тормозной системы колес, кроме того, на валах маршевых двигателей установлены дополнительные электрогенераторы, а централизованная гидросистема выполнена в локальном виде, имеет изменяемый уровень рабочего давления в широком диапазоне в зависимости от величины внешних нагрузок на органах управления и установлена для энергопитания всех рулевых гидроприводов в хвостовой части самолета.
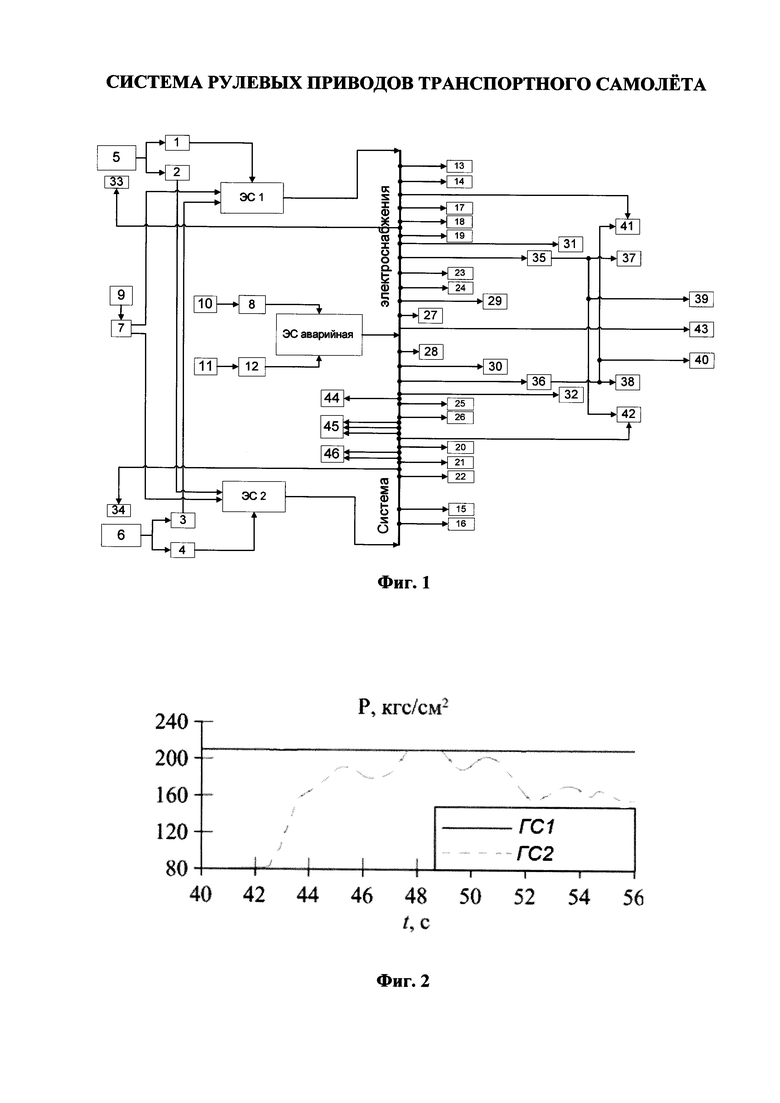
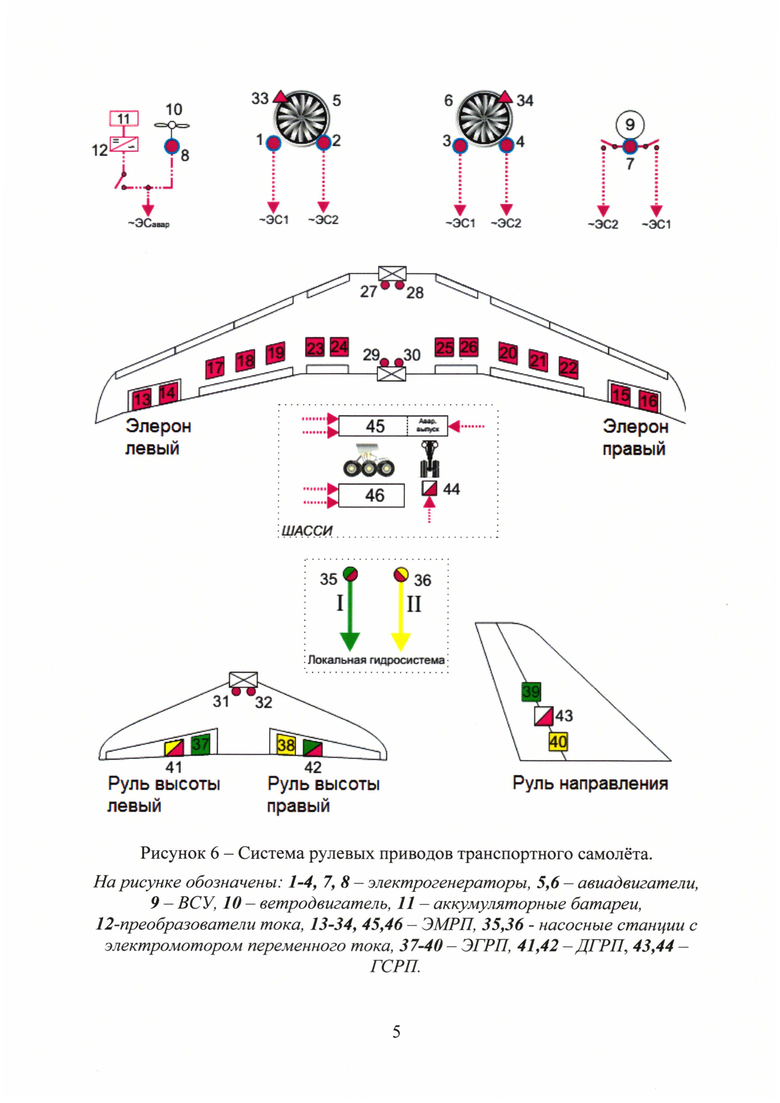
На фиг. 1 приведена система рулевых приводов для транспортного самолета с двумя маршевыми двигателями (см. также приложение, рис. 6). Система рулевых приводов транспортного самолета содержит основные электрогенераторы переменного тока 1, 2 и 3, 4, роторы которых соединены с роторами маршевых двигателей 5 и 6 соответственно, вспомогательные электрогенераторы переменного тока 7 и 8, роторы которых соединены с роторами вспомогательной силовой установки (ВСУ) 9 и турбинного агрегата 10 соответственно, аккумуляторные батареи преобразователи тока 12, электромеханические рулевые приводы:
13-16 элеронов,
17-22 интерцепторов,
23-26 воздушных тормозов,
27 и 28 предкрылков,
29 и 30 закрылков,
31 и 32 стабилизатора,
33 и 34 устройства реверса тяги двигателей,
гидравлические насосные станции 35 и 36 с электромоторами переменного тока, электрогидравлические рулевые приводы с комбинированным регулированием скорости для руля высоты 37, 38 и для руля направления 39, 40, двухрежимные гидравлические приводы (ДГРП) с комбинированным регулированием скорости 41 и 42, гидростатический рулевой привод (ГСРП) руля направления 43 и поворота носовой стойки шасси 44, электропривод уборки-выпуска шасси 45, электрические тормоза колес 46.
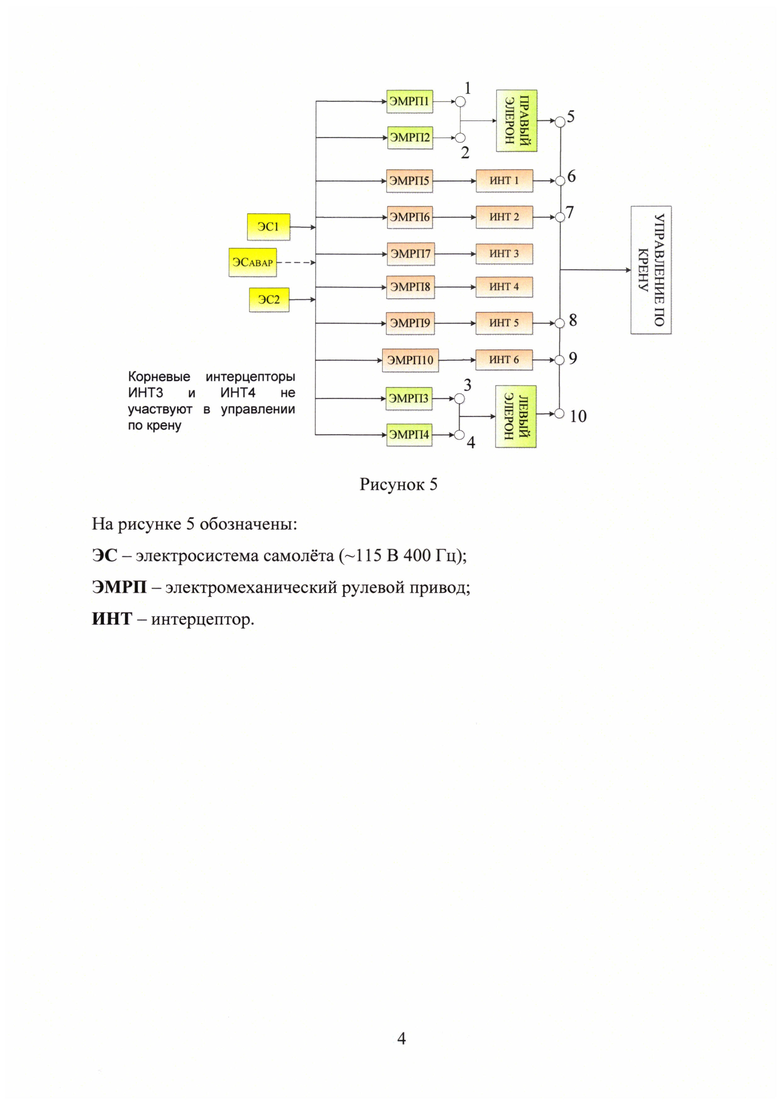
Работа системы заключается в следующем. В штатном режиме полета рулевые поверхности крыла и органы механизация отклоняются при помощи ЭМРП 13-30, таким образом в данной системе для крыла самолета полностью отсутствуют элементы с гидравлическим энергопитанием и, как результат, гидравлики в целом. ЭМРП 31 и 32 также используются для управления стабилизатором. Для отклонения наиболее ответственных органов управления: правой и левой секций руля высоты наряду с электрогидравлическими рулевыми приводами (ЭГРП) 37, 38 используются двухрежимные гидравлические (ДГРП) 41, 42, которые в штатном режиме работают от насосных станций 35 и 36 соответственно, а при отказах, например в части гидропитания, переключаются на энергопитание от электросистем ЭС1 и ЭС2 самолета. Для повышения надежности и эффективности управления в канале крена авторами предлагается использовать дифференциально отклоняющиеся секции руля высоты. Руль направления, также являющийся наиболее ответственным органом управления самолета, отклоняется при помощи двух ЭГРП 39, 40, которые работают совместно с гидростатическим рулевым приводом (ГСРП) 43. ГСРП является автономным рулевым приводом с электрическим энергопитанием. В рамках данной системы ГСРП 44 также используется для поворота носовой стойки шасси, а ЭМРП 33, 34, 45, 46 - для створок механизма реверса тяги двигателей, механизма уборки-выпуска шасси и тормозной системы колес соответственно.
На валах маршевых двигателей установлены современные электрические генераторы 1-4 повышенной мощности. В штатном режиме полета электроснабжение осуществляется от генераторов 1-4 двигателей 5, 6 и от резервного генератора 7 ВСУ 9, формирующих две независимых электросистемы ЭС1 и ЭС2 переменного тока 115 В 400 Гц (шины электропитания правого и левого борта соответственно). Аварийная шина электропитания ЭСавар формируется от генератора 8 турбинного агрегата 10 и предназначена для энергопитания только тех потребителей, работа которых необходима для совершения аварийной посадки самолета.
В рамках данной системы появляется возможность применения гидравлических насосных станций (НС) 35, 36 с электромоторами переменного тока и их расположения в непосредственной близости к потребителям - в хвосте самолете - при замене длинных трубопроводов с гидрожидкостью на электрические провода. При этом централизованная ГС самолета приобретает локальный (миниатюрный) характер и предназначена лишь для небольшой группы гидроприводов, используемых для наиболее ответственных рулевых поверхностей самолета - руля высоты и направления.
Известен способ регулирования следящего ЭГРП (ДГРП), описанный в патенте №2271479 за 2006 г., класс F15B 9/03, автор Манукян Б.С. Данный способ позволяет расширить функциональные возможности ЭГРП (ДГРП) и, как результат, снизить энергопотребление системы с уменьшением массы и габаритов гидравлического оборудования. Работа системы с применением указанного метода может быть реализована как в схеме автономного гидропитания одного ЭГРП (ДГРП), так и в схеме централизованного гидропитания группы ЭГРП (ДГРП) при сохранении высокой точности регулирования скорости следящего ЭГРП (ДГРП).
Используя указанный способ регулирования скорости для гидравлических приводов, схему локального гидрокомплекса самолета предлагается организовывать с изменяемым уровнем рабочего давления в зависимости от величины внешних нагрузок на органах управления. В случае безотказной работы ГС на режиме, не требующем номинальной (расчетной) мощности (например, в случае работы системы управления самолета на режиме крейсерского полета), имеется возможность разгрузить систему. Ввиду того, что такие режимы могут быть продолжительными, за счет разгрузки (временного понижения давления в гидросистеме) можно существенно повысить ресурс агрегатов данной системы или компенсировать последствия отказа сети источника гидропитания, путем включения форсированного режима для оставшейся работоспособной сети.
На фиг. 2 изображен фрагмент записи изменения давления в классической ГС, как у большинства современных самолетов и в ГС с изменяемым уровнем рабочего давления (как предлагается авторами). Рассматривается аварийный режим полета при отказе одного из двигателей самолета перед взлетом, т.н. «продолженный взлет». В этом случае у самолета начинает отклоняться руль направления с целью парирования возникшего аэродинамического момента. При этом руль высоты также отклоняется для выполнения взлета, таким образом активно работают ЭГРП (ДГРП) хвостовой части самолета.
В традиционной системе рулевых приводов транспортного самолета используется дроссельное регулирование скорости привода, поэтому давление в ГС постоянное (фиг. 2, линия ГС1) и составляет ~210 атм. С использованием способа комбинированного регулирования скорости приводов давление в ГС можно адаптировать к внешним нагрузкам на органах управления (фиг. 2, линия ГС2). Например, когда нагрузки незначительные или полностью отсутствуют, давление в ГС снижено относительно номинального в несколько раз. При возрастании уровня нагрузок на органах управления и, как следствие, на штоках рулевых приводов, давление в ГС растет с целью обеспечить потребный расход для ЭГРП (ДГРП).
Таким образом, ГС самолета становится не только локальной, но и «интеллектуальной», способной адаптироваться к режимам полета самолета и условиям внешних нагрузок. В целом за счет использования адаптивных режимов работы можно получить систему меньшей массы (по сравнению с традиционной в случае увеличения уровня номинального давления гидропитания) и (или) с лучшими показателями надежности, ресурса, меньшими тепловыделениями.
Используя специализированное программное обеспечение для расчета надежности систем «SamIam» при следующих значениях интенсивности отказов основных элементов:
[Оболенский Ю.Г. Введение в проектирование систем авиационных рулевых приводов. Учебное пособие / Ю.Г. Оболенский, С.А. Ермаков, Р.В. Сухоруков. М., 2011. - 343 с.] для среднего времени полета Т=5 час, имеем (см. приложение, рис. 3-5):
вероятность потери управления по курсу, тангажу, крену:
Таким образом, предлагаемая система рулевых приводов является своевременным решением в части электрификации самолетного оборудования. Система полностью удовлетворяет требованиям надежности и безопасности полетов. Реализация указанной системы на борту самолета позволяет получить как экономические, так и технические преимущества.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭНЕРГОПИТАНИЯ РУЛЕВЫХ ПРИВОДОВ ПЕРВИЧНЫХ ОРГАНОВ УПРАВЛЕНИЯ ПАССАЖИРСКОГО САМОЛЕТА | 2015 |
|
RU2598926C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА САМОЛЕТА | 2010 |
|
RU2455197C1 |
| Система дистанционного управления региональным самолётом | 2022 |
|
RU2795074C1 |
| СИСТЕМА РУЛЕВЫХ ПОВЕРХНОСТЕЙ С ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРИВОДАМИ ДЛЯ УПРАВЛЕНИЯ ОСНОВНЫМИ ЛЕТНЫМИ ФУНКЦИЯМИ САМОЛЕТА | 2016 |
|
RU2622321C1 |
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2011 |
|
RU2544251C2 |
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| ГИБРИДНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2577931C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2558168C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2554043C1 |
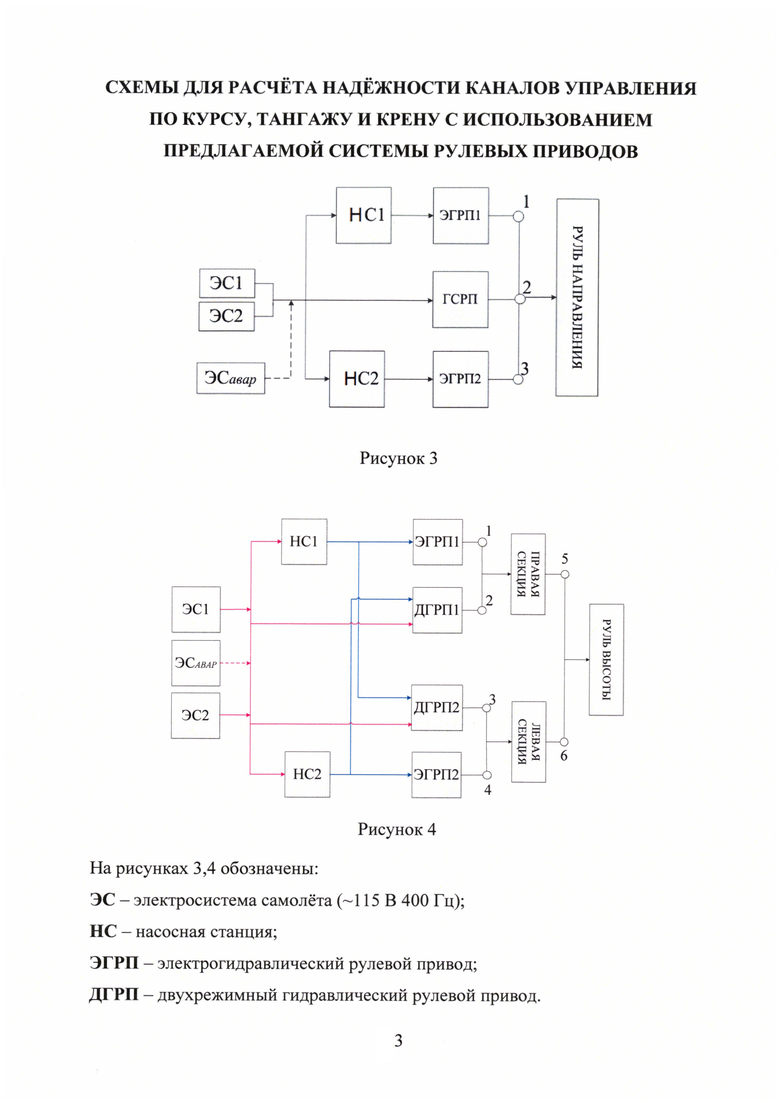
Изобретение относится к оборудованию летательных аппаратов и предназначено для построения системы управления полетом и реализации энергоснабжения рулевых агрегатов самолета в нормальных и аварийных условиях полета. Система рулевых приводов транспортного самолета состоит из основных электрогенераторов переменного тока, роторы которых соединены с роторами маршевых двигателей, вспомогательных электрогенераторов переменного тока, роторы которых соединены с роторами вспомогательной силовой установки (ВСУ) и турбинного агрегата соответственно, аккумуляторных батарей, преобразователей тока, электромеханических рулевых приводов (ЭМРП). В штатном режиме полета рулевые поверхности крыла и органы механизация отклоняются при помощи электромеханических рулевых приводов (ЭМРП). Для отклонения правой и левой секций руля высоты наряду с электрогидравлическими рулевых приводов (ЭГРП) используются двухрежимные гидравлические рулевые приводы (ДГРП), которые в штатном режиме работают от гидравлических насосных станций с электромоторами переменного тока, а при отказах переключаются на энергопитание от электросистем самолета. Руль направления отклоняется при помощи двух электрогидравлических рулевых приводов (ЭГРП), которые работают совместно с гидростатическими рулевыми приводами (ГСРП). Технический результат заключается в снижении веса оборудованного самолета, сокращении общего числа сложных элементов гидравлических и пневматических систем, упрощении эксплуатационного обслуживания самолета. 6 ил.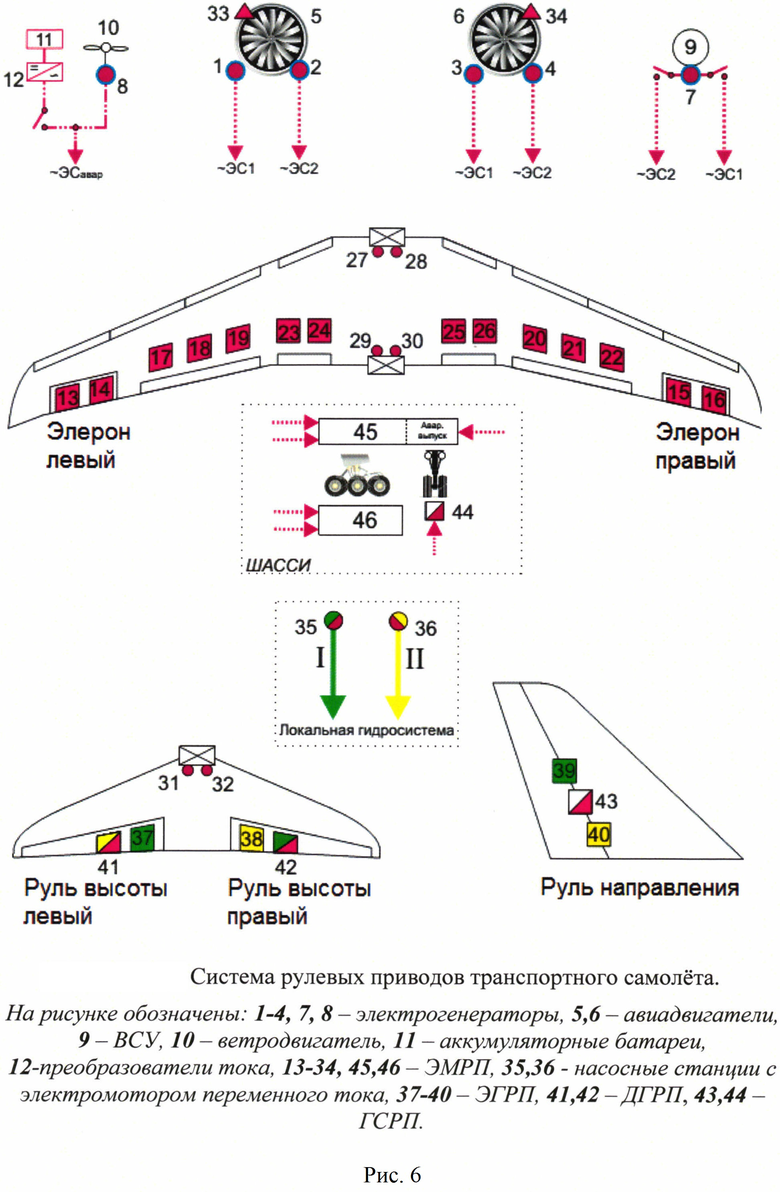
Система рулевых приводов транспортного самолета, содержащая основные электрогенераторы переменного тока, роторы которых соединены с роторами двух маршевых двигателей, вспомогательные электрогенераторы переменного тока, роторы которых соединены с роторами вспомогательной силовой установки и турбинного агрегата, аккумуляторные батареи, преобразователи тока, электромеханические рулевые приводы предкрылков, закрылков, стабилизатора, гидравлические насосные станции с электромоторами переменного тока, электрогидравлические рулевые приводы руля высоты и руля направления, отличающаяся тем, что секции элеронов, интерцепторов, воздушных тормозов содержат электромеханические рулевые приводы, а наиболее ответственные органы управления содержат электрогидравлические и двухрежимные гидравлические рулевые приводы с комбинированным регулированием скорости (для руля высоты) и гидростатический рулевой привод (для руля направления), вместе с тем гидростатический рулевой привод установлен для носовой стойки шасси, а электромеханические приводы установлены для реверса тяги двигателей, уборки-выпуска шасси и тормозной системы колес, кроме того на валах маршевых двигателей установлены дополнительные электрогенераторы, а централизованная гидросистема выполнена в локальном виде, имеет изменяемый уровень рабочего давления в широком диапазоне в зависимости от величины внешних нагрузок на органах управления и установлена для энергопитания всех рулевых гидроприводов в хвостовой части самолета.
| СИСТЕМА ЭНЕРГОПИТАНИЯ РУЛЕВЫХ ПРИВОДОВ ПЕРВИЧНЫХ ОРГАНОВ УПРАВЛЕНИЯ ПАССАЖИРСКОГО САМОЛЕТА | 2015 |
|
RU2598926C1 |
| КОНСТРУКЦИЯ НАКЛАДКИ НА ГРУДЬ ДЛЯ МОЛОКООТСОСА, МОЛОКООТСОС И СПОСОБ РАБОТЫ | 2016 |
|
RU2727592C2 |
| Г.И | |||
| Житомирский | |||
| Конструкция самолетов | |||
| - М.: Машиностроение, 1991, с | |||
| Способ переработки сплавов меди и цинка (латуни) | 1922 |
|
SU328A1 |

