Предлагаемое изобретение относится к оборудованию самолетов и предназначено для реализации системы дистанционного управления региональным самолетом в нормальных условиях полета и при отказах двух основных гидравлических систем.
Известна система управления пассажирского самолета McDonnell Douglas MD-90 ([MD-88/90 Operations Manual Volume 2. Copyright 2014 Delta Air Lines, Inc., 744 p.]). Система содержит основные рычаги управления, к которым относятся штурвалы и педали, механизмы загрузки штурвалов и педалей, две независимые гидравлические системы, механическую проводку управления, гидромеханические рулевые приводы руля высоты, руля направления, серворули на рулях высоты, элеронах, руле направления. В нормальных условиях полета управление рулями высоты и рулем направления осуществляется за счет гидромеханических рулевых приводов, питающихся от двух независимых гидравлических систем. В аварийных условиях полета, после отказа двух гидравлических систем, происходит отключение механической проводки управления от гидромеханических рулевых приводов и подключение механической проводки управления к серворулям на рулях высоты и руле направления.
К недостаткам такой системы следует отнести наличие механической проводки в каналах управления самолетом, которая увеличивает вес и сложность конструкции летательного аппарата, требует периодического технического обслуживания. Кроме того, отказ двух гидравлических систем и переход на аварийное управление приводит к увеличению усилий на рычагах управления.
Известна также принятая за прототип система дистанционного управления региональным самолетом Saab 2000 ([https://www.smartcockpitxom/aircraft-ressources/Saab_2000_Flight_Co html]). Система содержит основные рычаги управления по тангажу, крену и рысканию, к которым относятся штурвалы и педали, механизмы загрузки штурвалов и педалей, гидравлические системы, электросистему переменного тока, левый и правый элероны, левую и правую секции руля высоты, руль направления, механическую проводку управления элеронами, блок вычислителей алгоритмов управления электрогидравлическими рулевыми приводами, связанный с основными рычагами управления по тангажу, крену и рысканию, электрогидравлические рулевые приводы на левой и правой секциях руля высоты, руле направления, связанные с гидравлическими системами и с блоком вычислителей алгоритмов управления электрогидравлическими рулевыми приводами. В нормальных условиях полета управление рулями высоты и рулем направления осуществляется за счет электрогидравлических рулевых приводов, питающихся от трех независимых гидравлических систем. В случае отказа двух любых гидравлических систем, сохраняется управление одной секцией руля высоты, что обеспечивает уровень управляемости, достаточный для безопасного завершения полета.
Недостатками такой системы являются необходимость реализации трех независимых гидравлических систем на борту регионального самолета, что приводит к увеличению веса конструкции, а также наличие механической проводки управления элеронами, которая также увеличивает вес и сложность конструкции самолета.
Перспективной тенденцией развития силовой части системы управления является переход к концепции «более электрического самолета», предполагающий уменьшение числа гидравлических систем и более широкое использование электрических источников энергии, а именно переход от трех централизованных гидравлических систем 3Н на структуру с двумя гидравлическими и двумя электрическими системами 2Н2Е ([Moir I., Seabridge A. Aircraft Systems: Mechanical, electrical and avionics subsystems integration. Third Edition. Wiley, 2008]). Такой подход позволяет улучшить весовые и экономические показатели, а также обеспечить разнородность резервирования систем, что, в свою очередь, приводит к повышению безопасности полета.
Техническим результатом применения предлагаемой системы управления является уменьшение веса системы управления и упрощение технического обслуживания за счет отказа от механической проводки управления и третьей централизованной гидравлической системы при сохранении требуемого в соответствии с АП-25 резервирования и уровня пилотажных характеристик в системе управления с двумя независимыми гидравлическими системами.
Поставленный технический результат достигается тем, что в системе дистанционного управления региональным самолетом, содержащей основные рычаги управления по тангажу, крену и рысканию, гидравлические системы, электросистему переменного тока, левый и правый элероны, левую и правую секции руля высоты, руль направления, блок вычислителей алгоритмов управления электрогидравлическими рулевыми приводами, связанный с основными рычагами управления по тангажу, крену и рысканию, электрогидравлические рулевые приводы на левой и правой секциях руля высоты, руле направления, связанные с гидравлическими системами и с блоком вычислителей алгоритмов управления электрогидравлическими рулевыми приводами, дополнительно установлены электрогидравлические рулевые приводы на левом и правом элеронах, связанные с гидравлическими системами и с блоком вычислителей алгоритмов управления электрогидравлическими рулевыми приводами, кроме того, левый и правый элероны, левая и правая секции руля высоты, руль направления содержат серворули и связанные с серворулями электромеханические рулевые приводы, связанные с электросистемой переменного тока, а также, в системе установлены блок вычислителей алгоритмов управления электромеханическими приводами, связанный с электромеханическими рулевыми приводами и с основными рычагами управления по тангажу, крену и рысканию, и блок измерения угловых скоростей самолета, связанный с блоком вычислителей алгоритмов управления электромеханическими приводами.
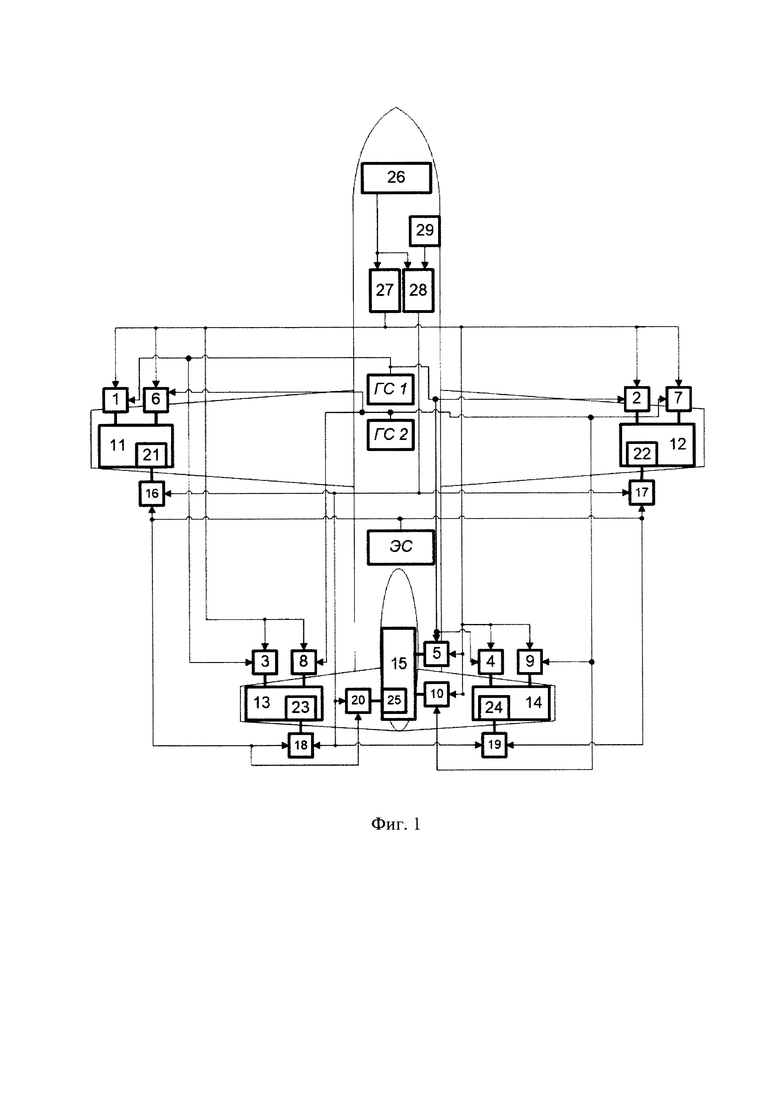
На фиг.1 приведена система дистанционного управления регионального самолета. Система дистанционного управления содержит традиционные электрогидравлические рулевые приводы (ЭГРП) 1-5, запитанные от первой централизованной гидравлической системы ГС1, ЭГРП 6-10, запитанные от второй централизованной гидравлической системы ГС2, установленные на левом элероне 11, на правом элероне 12, на левой секции руля высоты 13, на правой секции руля высоты 14, на руле направления 15, электромеханические рулевые приводы (ЭМП) 16-20, запитанные от электросистемы переменного тока ЭС, установленные на серворуле 21 левого элерона, на серворуле 22 правого элерона, на серворуле 23 левой секции руля высоты, на серворуле 24 правой секции руля высоты, на серворуле 25 руля направления, основные рычаги управления по тангажу, крену и рысканию левого и правого летчиков 26, блок вычислителей алгоритмов управления ЭГРП 27, блок вычислителей алгоритмов управления ЭМП 28, блок измерения угловых скоростей самолета 29.
Работа системы заключается в следующем. В штатном режиме полета в режиме ручного управления при перемещении рычагов управления по тангажу, крену и рысканию левого и правого летчиков 26 в блоке вычислителей алгоритмов управления ЭГРП 27 формируются сигналы управления на ЭГРП 1-10, которые отклоняют основные рулевые поверхности 11-15, при этом обеспечивается выполнение всех требований АП-25 к устойчивости, управляемости и маневренности, балансировке самолета во всех каналах управления. При отказе одной из централизованных гидравлических систем (ГС1 или ГС2), обеспечивается сохранение работоспособности одного ЭГРП на каждой основной рулевой поверхности, при этом характеристики устойчивости, управляемости и маневренности, балансировки самолета сохраняются на требуемом уровне в соответствии с п. 25.672 АП-25. При отказе двух централизованных гидравлических систем ГС1 и ГС2 все ЭГРП 1-10 переходят в пассивный режим (режим демфирования), в блоке вычислителей алгоритмов управления ЭМП 28 происходит подключение алгоритмов формирования управляющих сигналов на ЭМП 16-20 по сигналам перемещений рычагов управления по тангажу, крену и рысканию левого и правого летчиков 26. В соответствии со сформированными командными сигналами, ЭМП 16-20 отклоняют серворули левого и правого элеронов 21-22, серворули левой и правой секций руля высоты 23-24, серворуль руля направления 25. Отклонения серворулей приводят к возникновению шарнирных моментов на левом и правом элеронах 11-12, левой и правой секциях руля высоты 13-14, руле направления 15, под действием которых указанные поверхности отклоняются, в результате чего обеспечивается управление самолетом в каналах тангажа, крена и рыскания.
Для обеспечения требований АП-25 к возможности безопасного завершения полета при отказе двух гидравлических систем, а также для улучшения характеристик управляемости самолета в режиме сервоуправления, алгоритмы сервоуправления, реализуемые в блоке вычислителей ЭМП 28, в дополнение к сигналам перемещений рычагов управления 26 используют сигналы обратных связей по угловым скоростям, поступающим в блок вычислителей 28 из блока измерения угловых скоростей самолета 29.
Для обеспечения требований к безопасности перехода с основного режима управления на режим сервоуправления, в блоке вычислителей 28 при работе основного режима управления по заранее сформированным алгоритмам происходит формирование управляющих сигналов на ЭМП 18-19, установленные на серворулях левой и правой секций руля высоты 23-24, в результате серворули левой и правой секций руля высоты 23-24 автоматически отклоняются таким образом, чтобы шарнирный момент на левой и правой секциях руля высоты 13-14 в установившемся режиме полета сохранялся близким к нулевому. Автоматическое отклонение серворулей в основном режиме управления дополнительно позволяет снизить потребные усилия, развиваемые электрогидравлическими рулевыми приводами, что обеспечивает возможность уменьшения размеров и массы электрогидравлических рулевых приводов.
Характеристики управляемости самолета в режиме сервоуправления обеспечивают выполнение требований АП-25 и рекомендательных циркуляров к безопасному завершению полета. В конфигурации захода на посадку самолет сохраняет способность к выполнению установившегося разворота с креном 30°, перекладке из установившегося разворота с креном 30° на величину 60° за время не более 11 с, маневрам на пикирование с перегрузкой до 0,8g и на кабрирование с перегрузкой до l,3g, выполнению посадки в условиях бокового ветра под 90° величиной до 5 м/с. В ходе стендовых исследований управляемость самолета на режимах захода на посадку оценивается летчиком на уровне PR=4,5…5 по шкале Купера-Харпера, что является приемлемым для управления в отказных ситуациях.
Таким образом, предлагаемая система дистанционного управления является перспективным решением обеспечения разнородного резервирования в системе управления для повышения безопасности полета и улучшения эксплуатационных характеристик самолета. Реализация указанной системы на борту регионального самолета позволяет получить технические и экономические преимущества.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА РУЛЕВЫХ ПРИВОДОВ ТРАНСПОРТНОГО САМОЛЕТА | 2016 |
|
RU2654654C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2011 |
|
RU2544251C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СИСТЕМА РУЛЕВЫХ ПОВЕРХНОСТЕЙ С ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРИВОДАМИ ДЛЯ УПРАВЛЕНИЯ ОСНОВНЫМИ ЛЕТНЫМИ ФУНКЦИЯМИ САМОЛЕТА | 2016 |
|
RU2622321C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
Система дистанционного управления региональным самолетом содержит основные рычаги управления по тангажу, крену и рысканию, левый и правый элероны, левую и правую секции руля высоты, руль направления, гидравлические системы, электрогидравлические рулевые приводы на левой и правой секциях руля высоты, руле направления, связанные с гидравлическими системами и с блоком вычислителей алгоритмов управления электрогидравлическими рулевыми приводами, электросистему переменного тока. Левая и правая секции руля высоты и руль направления содержат также серворули и связанные с серворулями электромеханические рулевые приводы, соединенные с электросистемой переменного тока. Система содержит также блок вычислителей алгоритмов управления электромеханическими приводами и блок измерения угловых скоростей самолета. Обеспечивается повышение безопасности полета, уменьшение веса системы управления и упрощение технического обслуживания. 1 ил.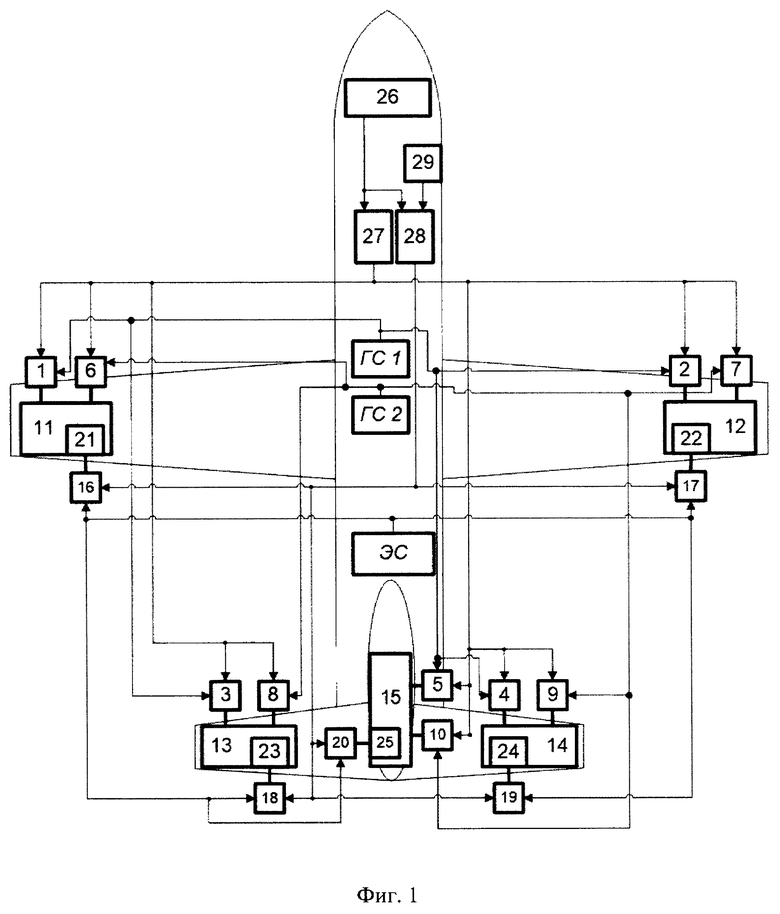
Система дистанционного управления региональным самолетом, содержащая основные рычаги управления по тангажу, крену и рысканию, гидравлические системы, электросистему переменного тока, левый и правый элероны, левую и правую секции руля высоты, руль направления, блок вычислителей алгоритмов управления электрогидравлическими рулевыми приводами, связанный с основными рычагами управления по тангажу, крену и рысканию, электрогидравлические рулевые приводы на левой и правой секциях руля высоты, руль направления, связанные с гидравлическими системами и с блоком вычислителей алгоритмов управления электрогидравлическими рулевыми приводами, отличающаяся тем, что в системе дополнительно установлены электрогидравлические рулевые приводы на левом и правом элеронах, связанные с гидравлическими системами и с блоком вычислителей алгоритмов управления электрогидравлическими рулевыми приводами, кроме того, левый и правый элероны, левая и правая секции руля высоты, руль направления содержат серворули и связанные с серворулями электромеханические рулевые приводы, связанные с электросистемой переменного тока, а также в системе установлены блок вычислителей алгоритмов управления электромеханическими приводами, связанный с электромеханическими рулевыми приводами и с основными рычагами управления по тангажу, крену и рысканию, и блок измерения угловых скоростей самолета, связанный с блоком вычислителей алгоритмов управления электромеханическими приводами.
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2661247C2 |
| US 6860452 B2, 01.03.2005 | |||
| US 20160114882 A1, 28.04.2016. | |||
